1. Introduction
Because of increasing life expectancies and declining birth rates, many countries, particularly developed and developing countries, face aging population problems. Data from the International Database of the U.S. Census Bureau shows that in more developed countries the percentages of individuals over 65 years old were 6.9% to 28.7% of the population in 2013, and these percentages are expected to reach 17.0% to 59.0% in 2050. The aging trend is forecast to accelerate to a peak before 2035, and the world is expected to experience a significant acceleration in population aging in the future [
1]. The number of elderly people who live alone or in the independent living communities has been increasing along with the aging population. Telecare automatically and remotely monitors real time emergencies and lifestyle changes over time in order to manage the risks associated with solitary living.
Some studies have found that approximately one-third of elderly people are involved in falls every year and about 10% of elderly fallers suffered multiple falls [
2,
3,
4]. The World Health Organization (WHO) indicated that falls are the second leading cause of unintentional injury deaths for those over 65 years old worldwide. Falls and fall-induced injuries, which include fatal and non-fatal injuries, are important public health problems and threats for the elderly [
5,
6]. The annual medical costs associated with fall-related injuries among elderly people in the USA are approximately $0.2 billion for fatal injuries and $19 billion for non-fatal injuries [
6]. Non-fatal injurious falls can not only cause disability or functional impairment, but also have psychological effects such as fear of falling again that reduce the range of Activities of Daily Living (ADLs) [
4]. Effective fall management includes two strategies: fall prevention and fall detection. The fall prevention strategy corrects risk factors and situations or delivers targeted interventions to reduce the incidence of falls [
7]. The most frequently mentioned physiological reasons for falls are loss of balance, medical conditions, muscle weakness and visual impairment, while environmental factors includes obstacles, the weather and lighting [
8]. Unfortunately, aging factors cannot be fully eliminated, so an automatic fall detection system is essential for elder persons.
Recently, several well-known approaches for designing automatic fall detection systems have been developed that can be classified into three main categories according to the type of sensor used: video-based, acoustics-based and wearable sensor-based fall detection systems [
9,
10,
11]. Anderson
et al. constructed a three-dimensional representation of humans from silhouettes obtained from multiple cameras [
9]. Zigel
et al. used optical fiber sensors and acoustic sensors deployed beneath the floor to collect vibration signals generated by falls [
10]. These two techniques perform well in controlled environments such as the laboratory, but these techniques are impractical for application outdoors or in real indoor environments like homes, hospitals, or care facilities. Image analysis can detect falls only when the fallers are in the line of vision of the camera, and the lighting and framing of image analysis must be modified and pre-processed before fall detection. The acoustic signal attenuation and the deployment density of acoustic sensors should be carefully considered. The wearable sensor-based fall detection approach is more attractive for elderly people because of privacy concerns and its flexibility.
Recent advances in Information and Communication Technologies (ICT), Wireless Sensor Networks (WSNs) and Micro-Electro-Mechanical Systems (MEMS) have enabled a variety of telecare applications. System integration for smart home telecare provides safety and security services based on automatic and remote activity monitoring [
12]. Fall detection systems can use wearable sensors such as micro-mercury switches [
13], optical sensors [
13], gyroscopes or accelerometers [
14] to collect body movement signals. Those signals are then processed in the wearable sensors, home server or cloud server by several fall-detection methods. Finally the fall alarm, location and faller information are transmitted through the WSNs, Internet or Global System for Mobile Communications (GSM) to the caregivers, doctors or families of the faller.
This study uses a tri-axial accelerometer mounted on the waist to measure motion acceleration, and proposes a fall detection scheme and an indoor positioning engine to detect the fall and the faller position using the Received Signal Strength Indicator (RSSI). The proposed method can provide effective fall alarms and reliable indoor position information that not only reduce the fear of falling, but also can reassure the user about maintaining an independent lifestyle.
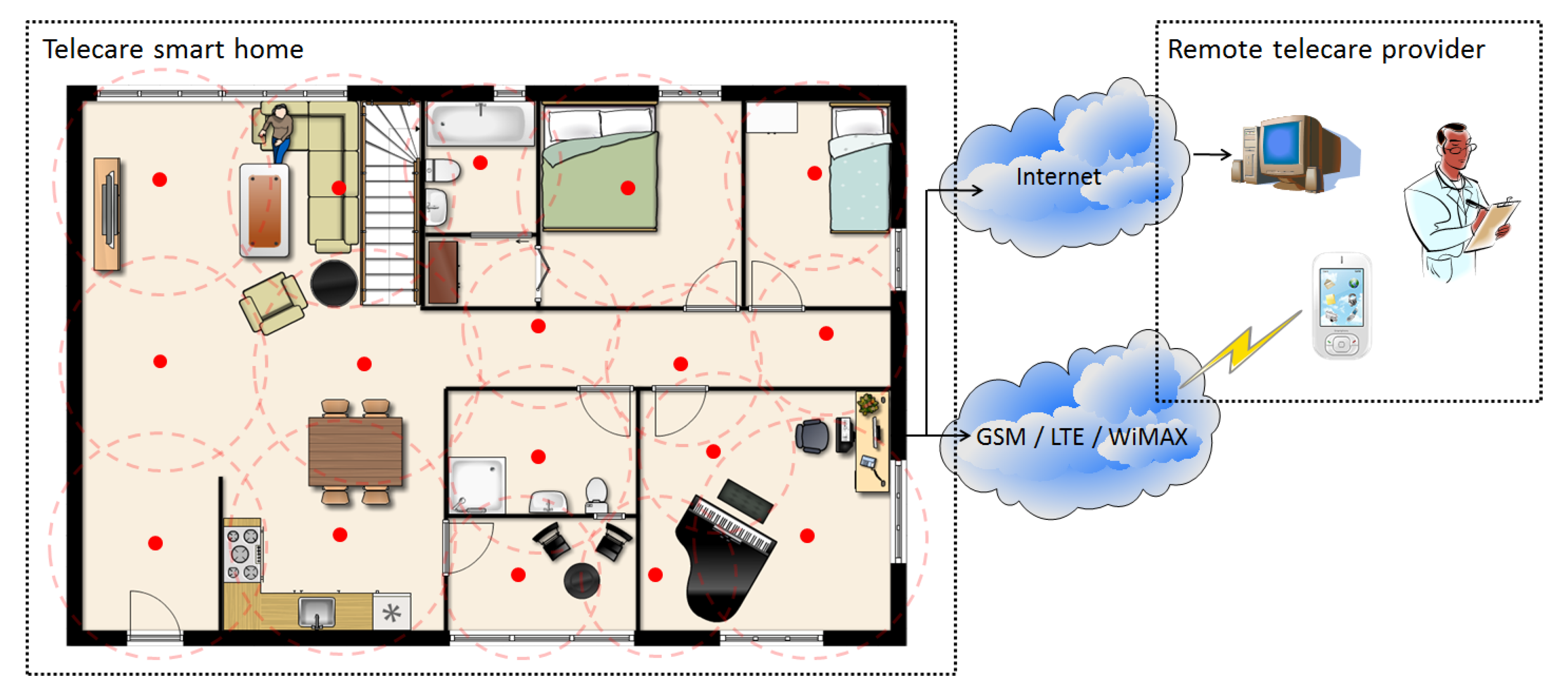
Figure 1 shows the scenario of a ZigBee-based location-aware fall detection system for a telecare service that contains two subsystems, namely the fall detection and indoor positioning subsystems. This study combines the powerful features of each subsystem to let caregivers immediately identify accident locations. In the telecare smart home, the nodes are classified into four types: wearable sensor, RF generator, reference node, and gateway. In the event of a fall, the wearable sensor detects the event and transmits the fall alarm to the gateway to trigger the indoor positioning subsystem based on the reliable transmission protocol [
15]. The server in the smart home calculates the location of the faller by the RSSI values broadcasted from the RF generator to all reference nodes and to the wearable sensor. The server at home can be connected using Wireless Wide Area Networks (WWAN) technology, such as Long Term Evolution (LTE) and Worldwide Interoperability for Microwave Access (WiMAX), GSM and Internet, to achieve a seamless platform for remote telecare monitoring. Finally, the fall alarm and faller information are transmitted to the remote telecare provider, and the caregivers can provide assistance.
Figure 1.
Scenario of ZigBee-based location-aware fall detection system.
Figure 1.
Scenario of ZigBee-based location-aware fall detection system.
The rest of this paper is organized as follows:
Section 2 briefly introduces related fall detection and indoor positioning technologies.
Section 3 then details the proposed ZigBee-based location-aware fall detection system. Using real data collected from ZigBee-based sensor networks, the experimental results demonstrate the capabilities of the proposed system.
Section 4 gives a clear explanation and discussion. Finally,
Section 5 addresses our conclusion.
3. ZigBee-based Location-aware Fall Detection System
In the ZigBee-based location-aware fall detection system, the wearable sensor detects the fall event and transmits the fall alarm to the gateway to trigger the indoor positioning engine based on the reliable transmission protocol [
15]. The nodes can be categorized into four types according to functions: wearable sensor, RF generator, reference node, and gateway, as shown in
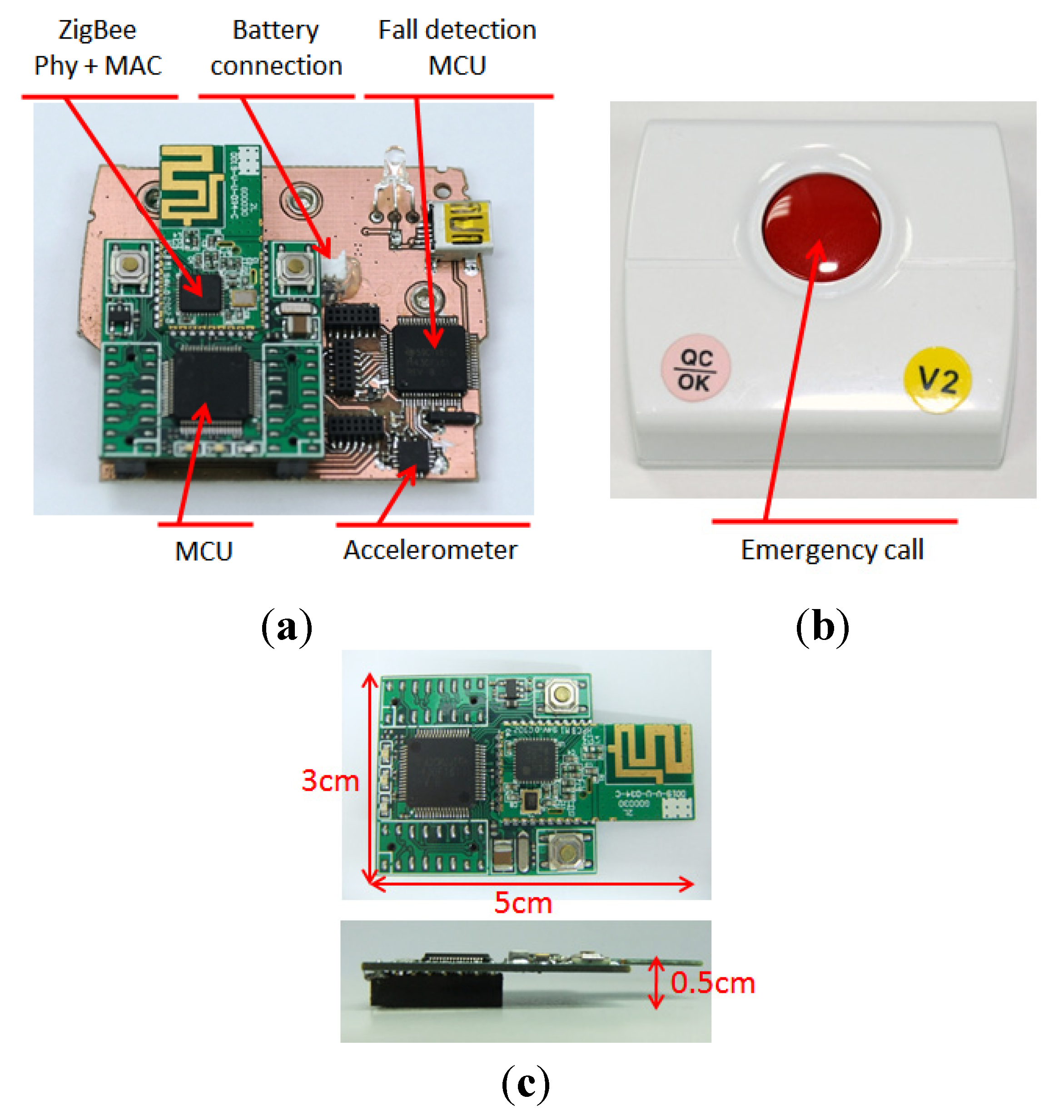
Table 1. All kinds of nodes use ZigBee module that comprises a MSP430 microcontroller and an UZ2400 ZigBee chip to transmit the signals. The UZ2400 transforms the power value (dBm) into the RSSI value linearly, the power value after transformation ranges from 0 to 255. The wearable sensor includes a ZigBee module and a motherboard with a MSP430 microcontroller, an ADXL 325 tri-axial accelerometer (±5 G). Except for the gateway connected with a computer directly, the power is supplied by the battery for the other three kinds of nodes.
Figure 2 shows the ZigBee module and wearable sensor. The ZigBee module has dimensions 5 cm (length) × 3 cm (width) × 0.5 cm (height) and the wearable sensor in this case has dimensions 6 cm (length) × 5 cm (width) × 2 cm (height).
Table 1.
The descriptions of nodes in the ZigBee-based location-aware fall detection system.
Table 1.
The descriptions of nodes in the ZigBee-based location-aware fall detection system.
| Nodes | Hardware | Functions |
|---|
| Wearable sensor | ZigBee module; Mother board; Battery | Detect fall; Receive signals from RF generators and send RSSI to computer through gateway |
| RF generator | ZigBee module; Battery | Send the broadcast signal to wearable sensor and reference nodes |
| Reference node | ZigBee module; Battery | Receive signals from RF generators and send RSSI to computer through gateway |
| Gateway | ZigBee module | Deliver the data from all the nodes to computer |
Figure 2.
The hardware of wearable sensor and ZigBee module (a) The composition of wearable sensor. (b) The case of wearable sensor. (c) ZigBee module.
Figure 2.
The hardware of wearable sensor and ZigBee module (a) The composition of wearable sensor. (b) The case of wearable sensor. (c) ZigBee module.
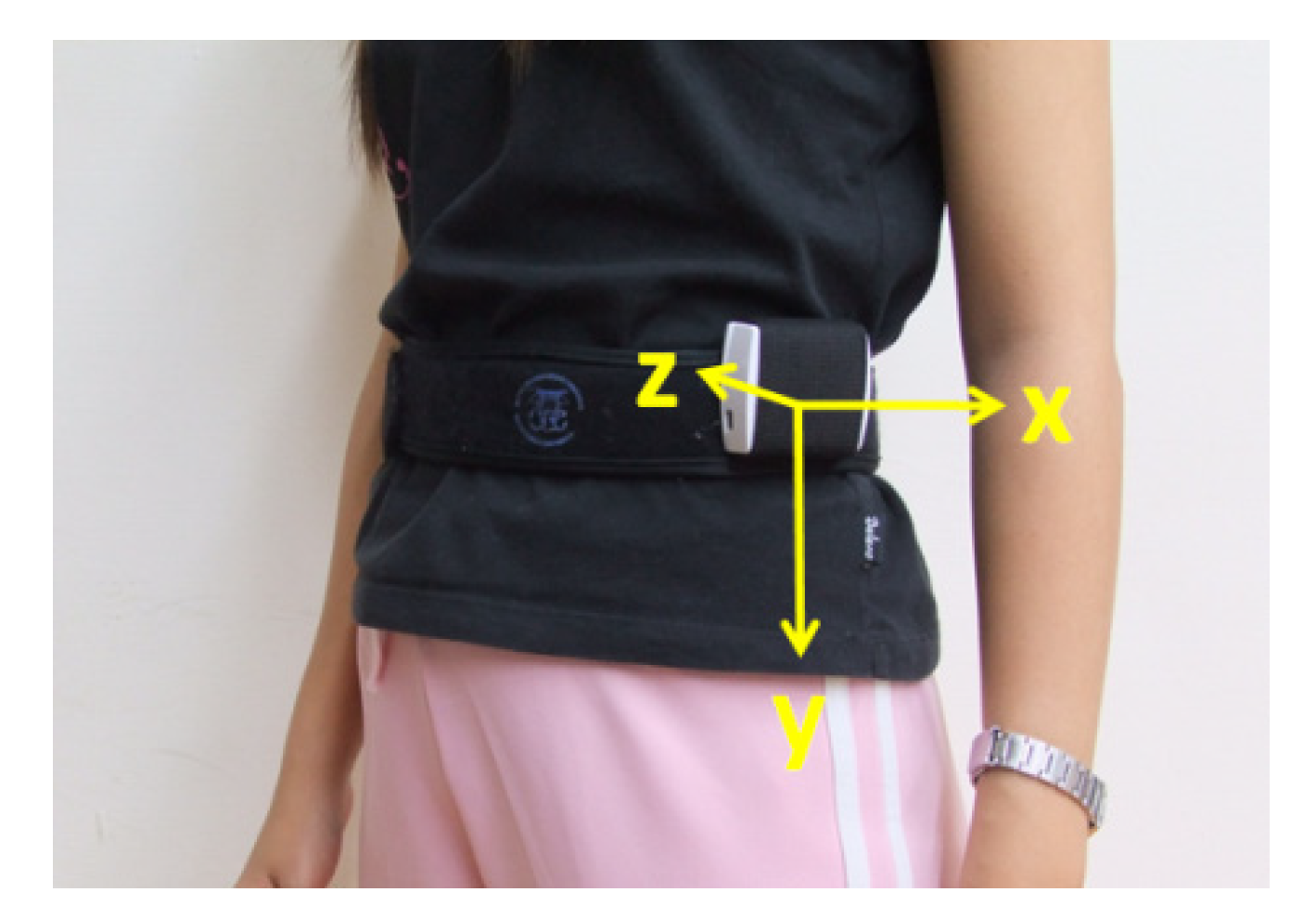
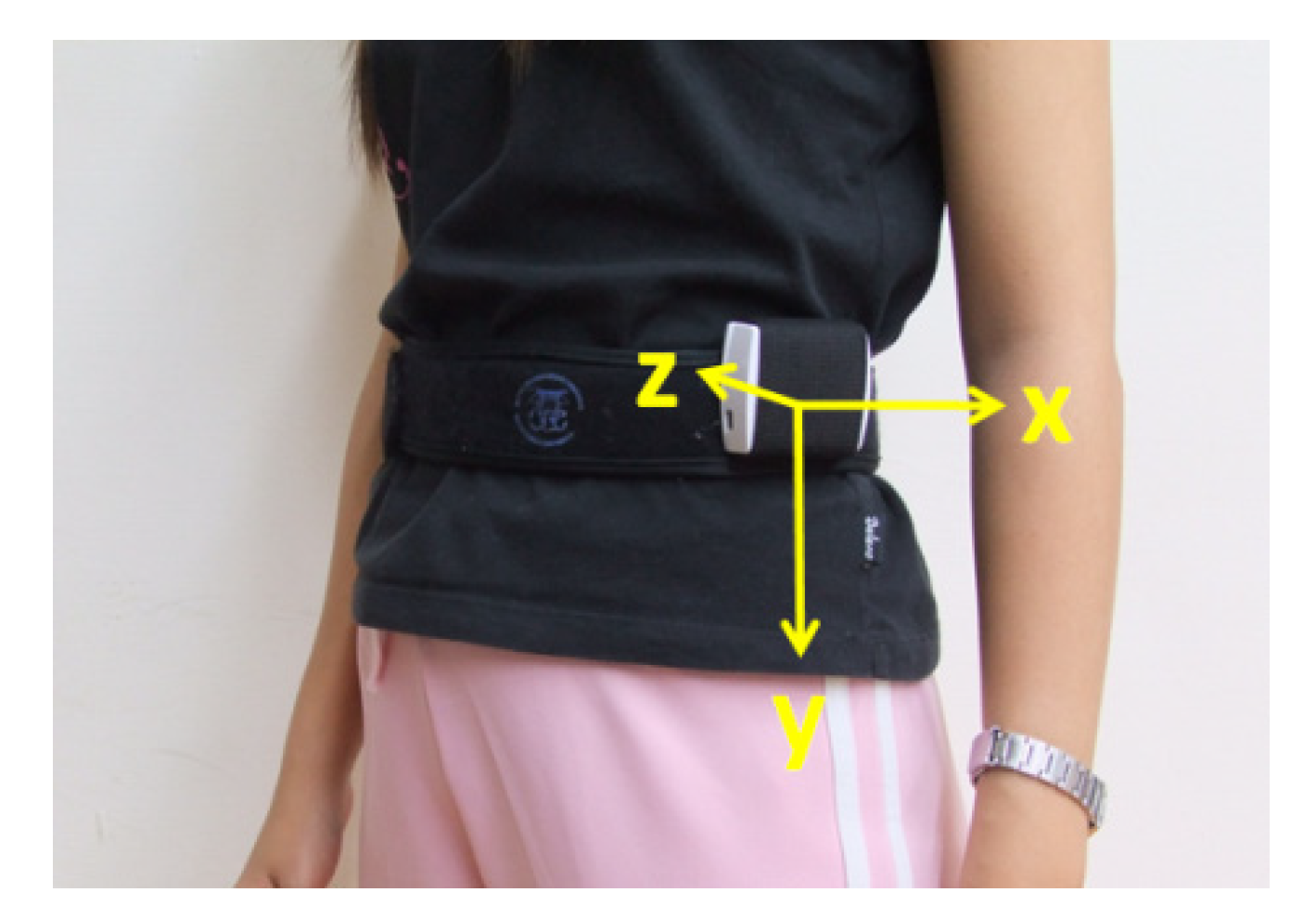
The simulated falls were performed on a soft mat by nine healthy young subjects (62.89 ± 15.26 kg weight, 167.11 ± 8.1 cm height) wearing protectors. The volunteers wore the sensor on the left side of waist, and according to the placement of the tri-axial accelerometer, the
x-axis represents the sagittal direction, the
y-axis the vertical direction, and the
z-axis the frontal side, illustrated in
Figure 3.
Figure 3.
Wearing position and the axial direction of sensor.
Figure 3.
Wearing position and the axial direction of sensor.
The sample rate of the accelerometer is 200 Hz. The simulated falls occur in four main directions, front, posterior, left and right lateral falls, following seven kinds of ADLs. For example, the subject stands up and then falls forward. To clarify the effect between the wearing side (left) and the lateral falling side, two situations occur during lateral falls (left and right). There are 28 kinds of simulated fall types. On the other hand, this study also selects seven types of ADLs with normal or fast speed, such as standing up, sitting down, lying, walking, jumping, running, going up and down stairs.
Table 2 lists the all characteristics of falls and ADLs.
Table 2.
The characteristics of falls and daily activities.
Table 2.
The characteristics of falls and daily activities.
| Daily Activities | Characteristics |
| Stand up | From sit | From squat |
| Sit down | Normal | Fast |
| Lie on the bed | Normal | Fast |
| Walk | Normal | Fast |
| Jump | On the ground | On the bed |
| Go up and down stairs | Normal | Fast |
| Run (18 m) | Normal speed |
| Activities before Falls | Fall Directions |
| Stand | Front | Posterior | Right lateral | Left lateral |
| Sit to stand | Front | Posterior | Right lateral | Left lateral |
| Stand to sit | Front | Posterior | Right lateral | Left lateral |
| Walk | Front | Posterior | Right lateral | Left lateral |
| Stoop | Front | Posterior | Right lateral | Left lateral |
| Jump | Front | Posterior | Right lateral | Left lateral |
| Walk backward | — | Posterior | Right lateral | Left lateral |
| Lie on the bed (25 cm height) | Turn the body then fall to the ground |
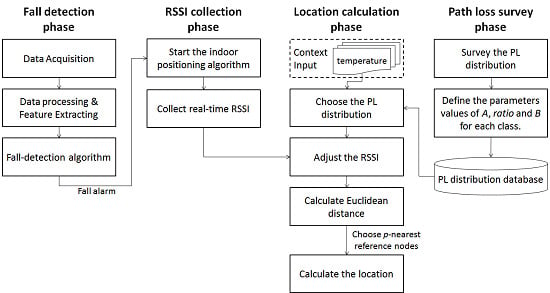
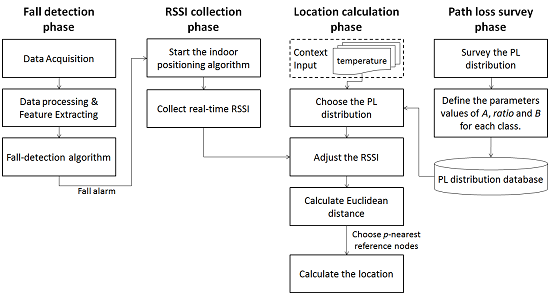
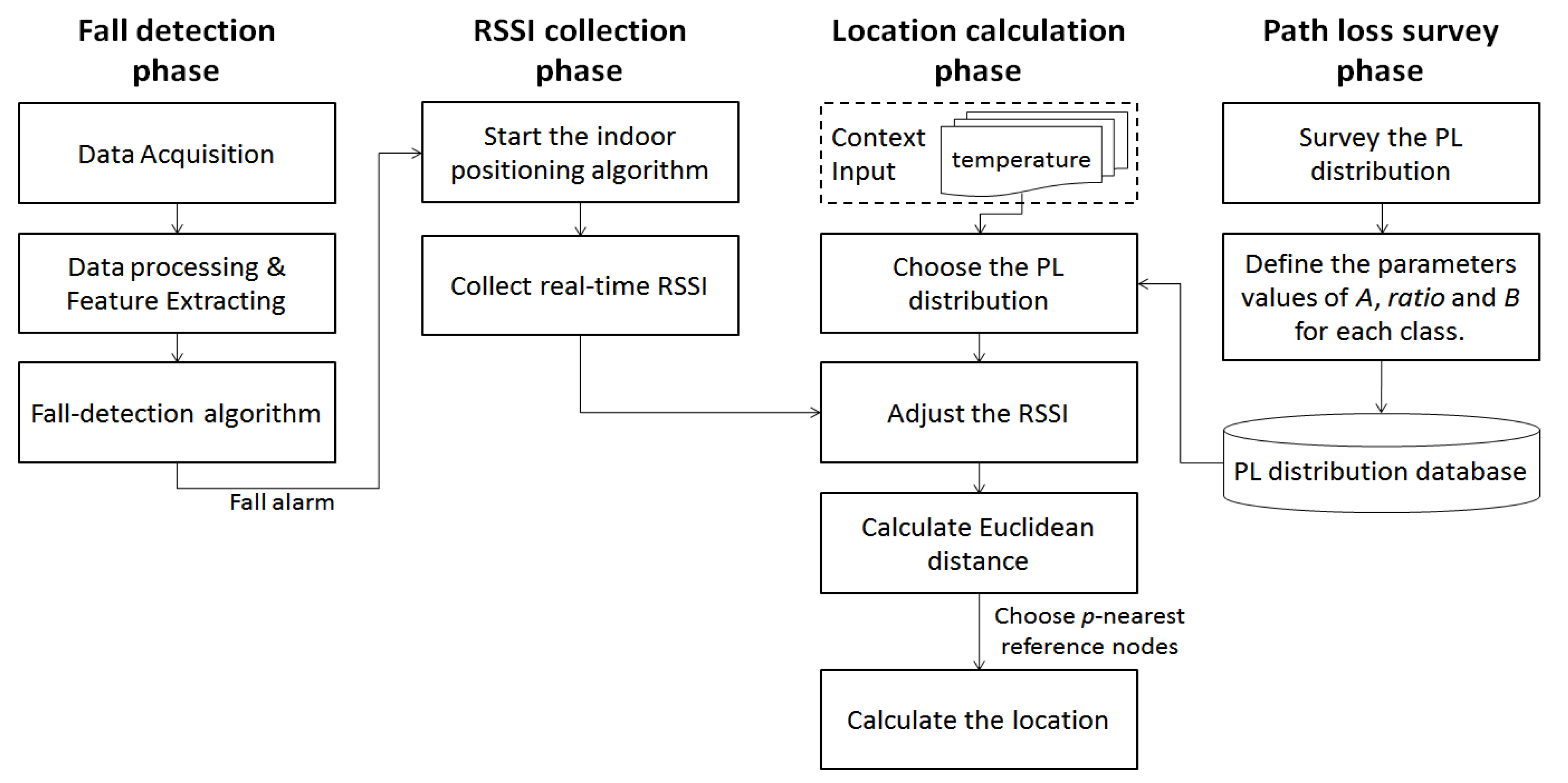
The flow diagram of ZigBee-based location-aware fall detection system is shown in
Figure 4. When falls can be detected in the fall detection phase, the fall alarm will start the indoor positioning engine that consists of three phases: path loss survey phase, RSSI collection phase and location calculation phase to detect the location of the faller in real time.
Figure 4.
The flow diagram of ZigBee-based location-aware fall detection system.
Figure 4.
The flow diagram of ZigBee-based location-aware fall detection system.
3.1. Fall Detection Phase
After receiving the raw data from the accelerometer, the data processing phase handles the analog to digital signal conversion and memory allocation. Furthermore, the results of the data processing and feature extraction phase are calculated using the fall-detection algorithm. The fall alarm can be classified into two kinds based on level of emergency. One is the normal fall alarm that occurs during non-serious falls, and in this case the user can cancel the alarm by pressing and holding the emergency fall button, like the red button in
Figure 2b. The other is the critical fall alarm indicating the fall is sufficiently serious to cause fatal injury, and in this situation the faller requires immediate help.
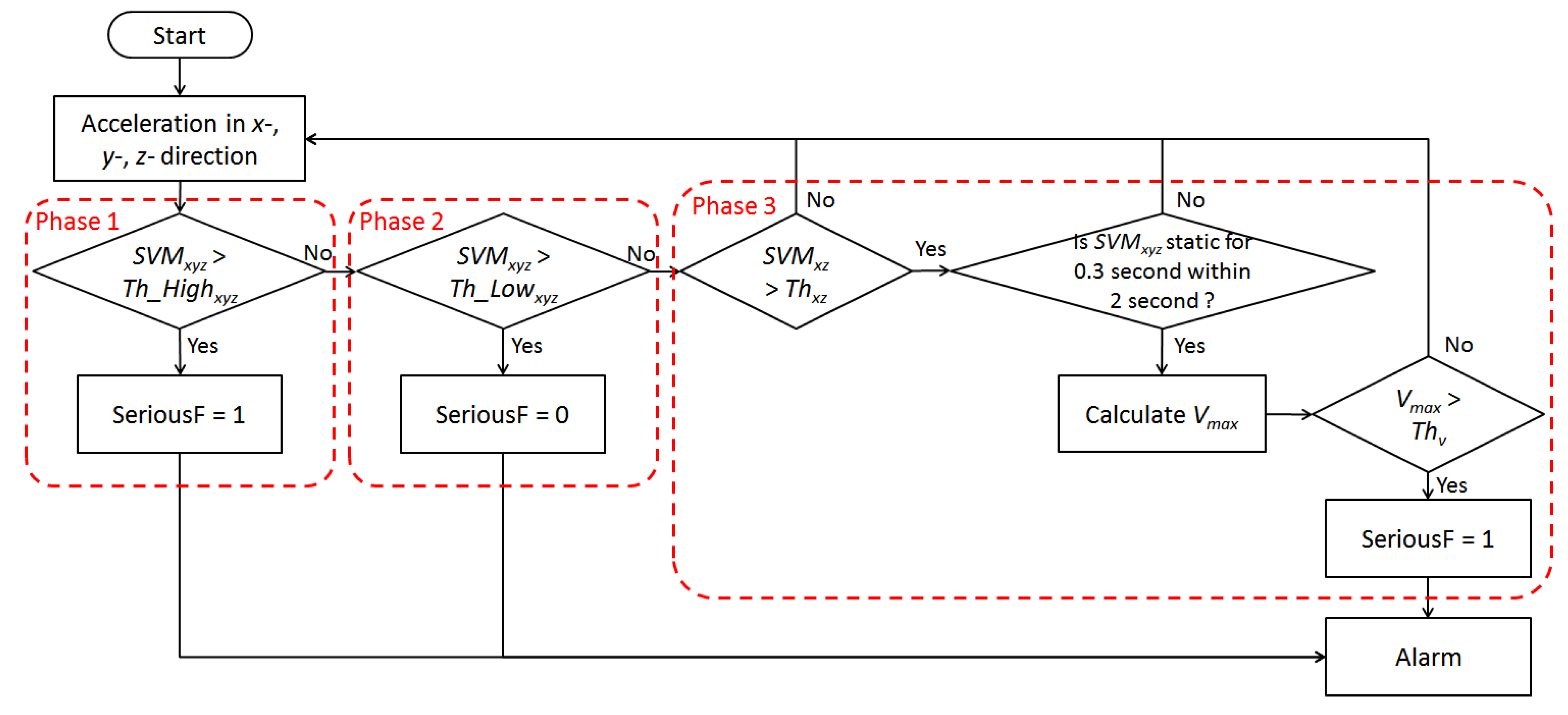
The fall detection algorithm includes three phases, as shown in
Figure 5. Phase 1 and Phase 2 use the upper peak acceleration to detect falls and Phase 3 evaluates the vibration by reference velocity. During the first phase, the Sum Vector Magnitude of tri-axial accelerations
(SVMxyz) was adopted as the threshold in fall detection. Let
SVMxyz be defined as:
where
ax,
ay and
az are the accelerations of the
x-axis,
y-axis, and
z-axis, respectively. If
SVMxyz exceeds the maximum
SVMxyz value of ADLs, the critical fall alarm is detected. The maximum
SVMxyz value of ADLs is then set as the first fall detection threshold,
Th_Highxyz. In Phase 2, to avoid the users being helpless following minor falls, the maximum
SVMxyz value of normal speed ADLs is set as the second fall detection threshold,
Th_lowxyz. However, some
SVMxyz values of ADLs with fast speed exceed the
Th_lowxyz, so when normal fall alarms are detected, the user can cancel the alarm by pressing and holding the emergency fall button. Following the experimental results from the maximum
SVMxyz value of ADLs with fast speed and the maximum
SVMxyz value of normal speed ADLs, we set the
Th_Highxyz = 6 G and
Th_lowxyz = 3.5 G.
In the final phase, the variation of velocity on horizontal plane (
x-
z plane),
SVMxz, that means the body tilt forward, backward or laterally is calculated by:
During the fall, the acceleration on horizontal plane will exceed 2 G. To distinguish falls from ordinary daily activities, the threshold
Thxz is set to 2 G. Moreover, the reference velocity (
Vmax) is defined as:
where the
K is the time when
SVMxz is larger than
Thxz, and
L is the occasion when the body is static for 0.3 s within 2 s after
SVMxz is larger than
Thxz. Before the integration, the acceleration component due to gravity (1 G) must be subtracted from
SVMxyz. Regarding the accelerometer position, severe injuries might occur if the falling reference velocity is more than the threshold of
Vmax (
Thv). The threshold of the
Vmax is set to 1.7 m/s that helps distinguish some violent daily activities from critical falls.
Figure 5.
The fall detection algorithm.
Figure 5.
The fall detection algorithm.
3.2. Path Loss Survey Phase
According to the characteristics of radio frequency signal, the power of the received signal decreases with distance. The log-distance Path Loss (PL) model describes the relationship between received power and distance, which is calculated as follows:
where the parameter
n is called the PL exponent. Path loss can be represented by the path loss exponent, whose value depends on the specific propagation environment. And
n = 2 is for propagation in free space. The
PL(d0) is the received power from the transmitter at a known close distance
d0, which is typically one meter for indoor system, and
Xσ denotes a zero mean Gaussian random variable that reflects the interference from indoor environment [
24]. Unfortunately, the real received signal power fails to conform with the PL mode, and the PL distribution described by real signal presents a non-log-linear relationship between RSSI and distance. In the path loss survey phase the PL distribution of ZigBee module is surveyed in different contexts and the parameter values of each class are defined to increase positioning accuracy. According to the characteristics between RSSI and distance, the RSSI can be divided into four classes based on our previous research [
25]:
Class I: the RSSI value in Class I is measured within 0.5 m transmission distances.
Class II: the RSSI value in this class is measured between 0.5 m to 2 m transmission distances. And the RSSI versus distance is near linear relationship in Class II.
Class III: the RSSI in this class will be distributed at the distance from 2 m to 7 m.
Class IV: when the distance far from 7 m and above, the RSSI values rapidly decay in Class IV.
The range of each class is defined for a temperature of 25 °C: Class I (144–255), Class II (112–143), Class III (60–111) and Class IV (0–60).
3.4. Location Calculation Phase
After all the RSSI values are transmitted to the computer, the location of the wearable sensor is calculated during this phase. Suppose a situation involving
M fixed reference nodes,
N fixed RF generators and one wearable sensor installed in a telecare smart home. The RSSI vector of the wearable sensor is
W = (
w1, …,
wN), and the corresponding RSSI vector of the
i-th reference node is
Ri = (
ri1, …,
riN). The Euclidean distance between the wearable sensor and the reference node
i is then defined as:
The wearable sensor has a Euclidean distance vector,
E = (
e1, …,
eM), demostrating the similarity between the wearable sensor and all reference nodes. The smallest
ei means the reference node
i is the nearest reference node surrounding the wearable sensor. Based on our previous research [
25], the RSSI should be adjusted before calculating the Euclidean distance, as follows:
The
rss is the original RSSI value, and the
rss’ is named as the weighted RSSI value. The parameters
A,
ratio and
B are decided according to different context conditions, such as the temperature and humidity.
Table 3 lists the parameter values of
A,
ratio and
B according to each class from the path loss survey phase at a temperature of 25 °C. The original RSSI in Equation (5) is replaced with the weighted RSSI,
W’ = (
w1’, …,
wN’) and
Ri’ = (
ri1’, …,
riN’), to obtain the adjusted Euclidean distance vector. Finally, the
p-nearest reference nodes are selected to calculate the unknown position of the mobile node by:
where
wk denoted the weight of the
k-th nearest reference node sorted by
E, (
xk,
yk) is the coordinate of
k-th reference node and (
x,
y) is the estimation position of the wearable sensor. The weight that depends on the
p-nearest reference nodes is defined as:
where
e’ is the modified Euclidean distance obtained using weighted RSSI vector of the wearable sensor and reference nodes. Equation (8) means the reference node with the smallest Euclidean distance has the largest weight.
Table 3.
The parameter values at a temperature of 25 °C.
Table 3.
The parameter values at a temperature of 25 °C.
| Class | A | ratio | B |
|---|
| Class I | 176 | 0.05 | 144 |
| Class II | 112 | 0.3 | 112 |
| Class III | 60 | 0.6 | 60 |
| Class IV | 0 | 1 | 0 |
4. Results and Discussion
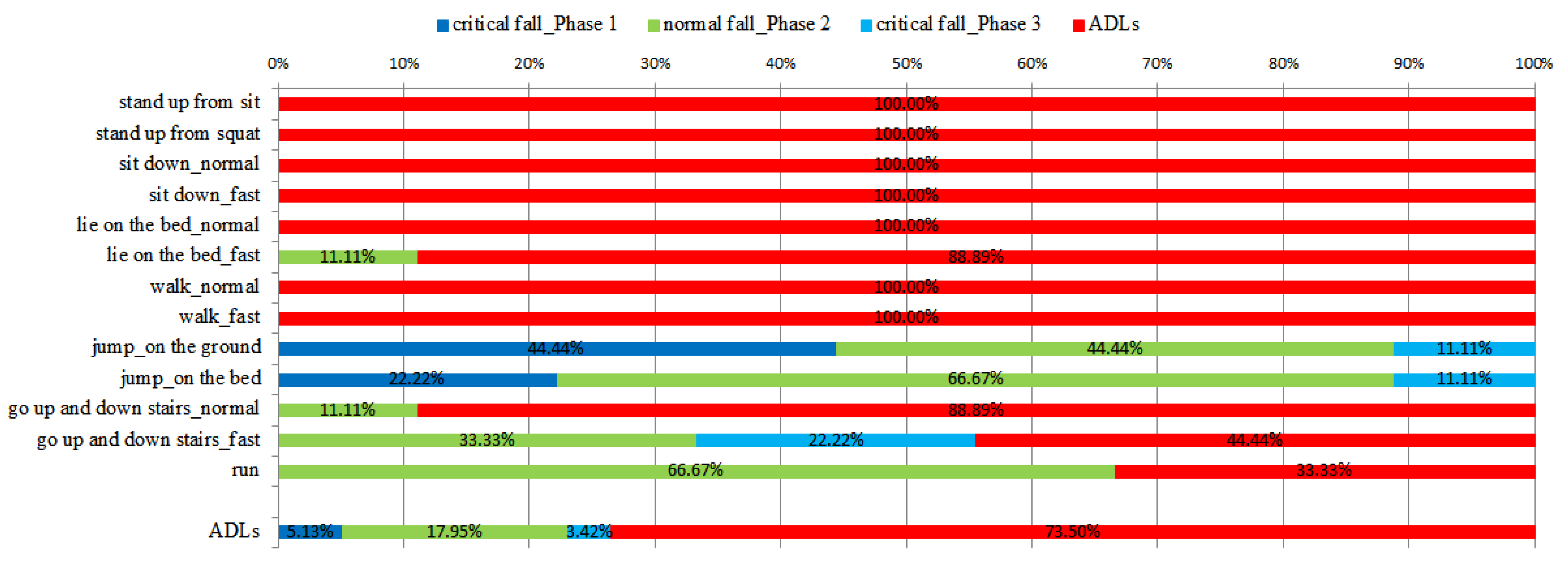
Figure 6 shows the experimental results of the ADLs using the proposed fall detection algorithm. The blue line and sky-blue line indicates the ADLs that are detected as critical falls, and the green line represents the ADLs that are detected as normal falls. Ideally, the ADLs should be classified as normal activities like the red line in
Figure 6. This study finds that the ADLs acting in the house frequently, such as stand up from sitting and squatting, sit down, lie on the bed, walk and go up and down stairs with normal speed, have just two false alarm incidents in our fall detection algorithm. The false alarms happened on lying on the bed with fast speed and going up and down stairs with normal speed which are recognized as normal falls. If an ADL is recognized as a normal fall (Phase 2), users can cancel the alarm themselves to reduce the burden on remote telecare providers. Some acute ADLs will be detected as critical falls, for example, jumping, and going up and down stairs fast, but an elderly person seldom performs such acute ADLs at home. For ADLs acting in the house frequently, there exist only a 2.46% probability of normal falls, and 97.54% probability of ADLs. For all ADLs, there exist an 8.55% probability of false alarms, 17.95% probability of normal falls, and 73.5% probability of ADLs.
Figure 6.
The detection results of ADLs using the proposed fall detection algorithm.
Figure 6.
The detection results of ADLs using the proposed fall detection algorithm.
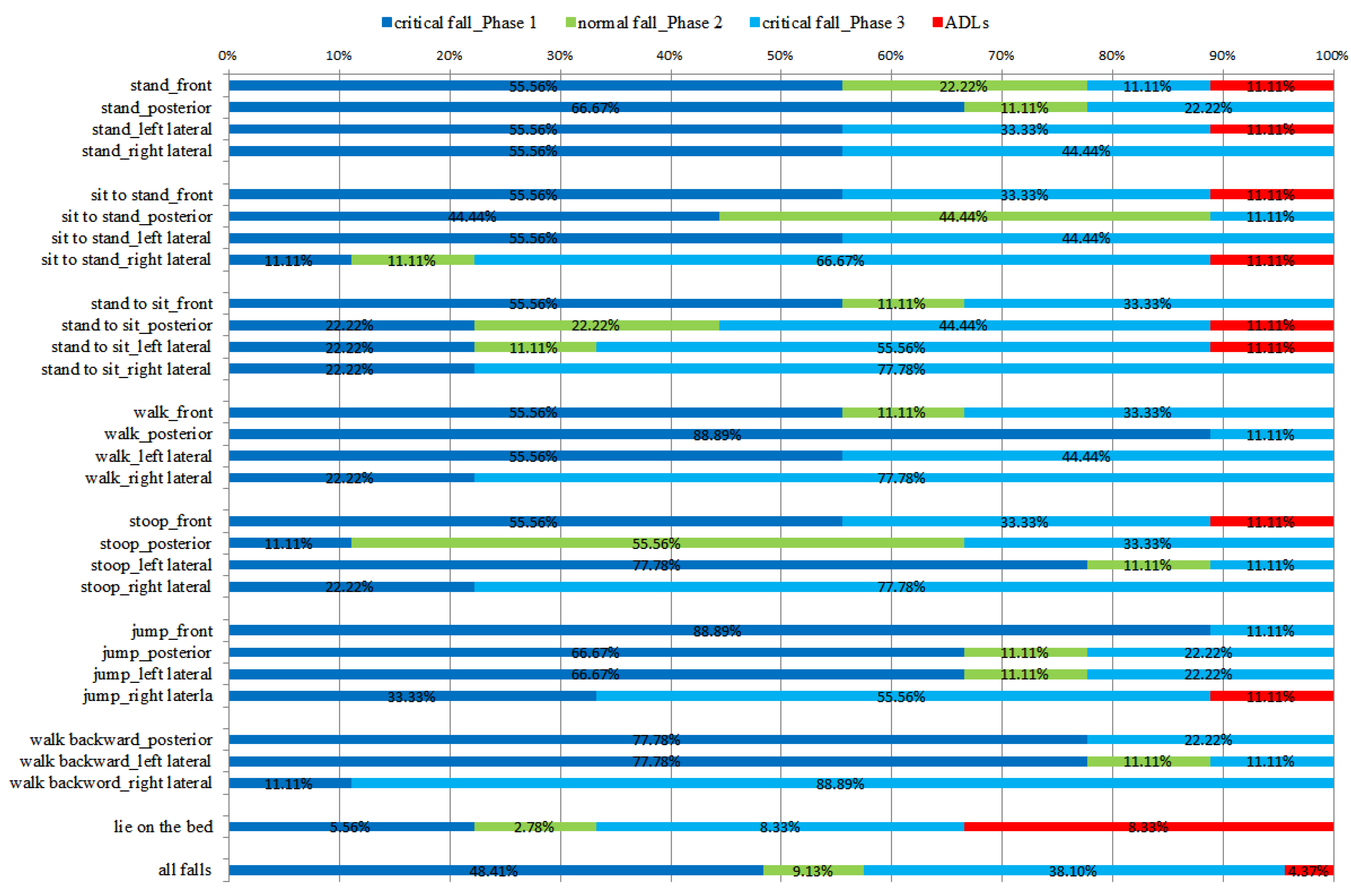
On the other hand, for fall detection results,
Figure 7 presents the results of falls calculated using the proposed fall detection algorithm. Most falls can be detected as critical falls (the blue and sky-blue line), and about half of the critical falls are recognized during Phase 1, which means there exists a 48.41% probability that the acceleration of falls exceeds the maximum acceleration value of ADLs. Especially when the falls follow walking or jumping, there is about 60% probability to detect falls in Phase 1 that means the activities with speed before falling would increase the maximum acceleration value as the moment of impact. The falls that involve indirectly falling from a standing posture are frequently recognized during Phase 3, for example moving from standing to sitting followed by a fall has a 52.78% probability of being detected in Phase 3. If the system uses only the single threshold fall detection algorithm proposed by Bourke
et al. [
17] to detect falls, the falls detected in Phase 3 will be judged as ADLs that will have numerous false alarms. The high rate of false alarms reduces user’s acceptance of the system. The influence of wearing position on lateral falling direction is notable. Based on the same fall posture, more right lateral falls are identified in Phase 3 than left lateral falls. Because the sensor is worn on the left waist, the sensor impacts the ground directly during left lateral falls, which induces higher acceleration. Not only the activities before falling but also the sensor wearing position would affect the acceleration value during falling. In conclusion, the fall detection algorithm had an accuracy of 88.62%, precision of 88.6%, sensitivity of 95.63%, and specificity of 73.5% for all ADLs and falls. The results from ADLs acting in the house frequently and falls showed accuracy of 96.10%, precision of 99.18%, sensitivity of 95.63%, and specificity of 97.53%. The proposed three-phase fall detection algorithm can effectively detect the falls.
The indoor positioning experiment is performed in a 11 m (length) × 5.75 m (width) classroom. The gateway is located in the middle and the 18 reference nodes are fixed in the classroom at intervals of 2 m. Furthermore, five RF generators are set symmetrically between reference nodes. The error distance,
err, can illustrate the performance based on the coordinate of the mobile node (
x0,
y0), and the estimation result (
x,
y) is defined as:
One of the key issues affecting the estimation position is to determine the optimal number
p of nearest reference node(s) for Equations (7) and (8). Based on a previous study [
23,
25], setting
p = 4 minimizes the error distance. The average error distance is 1.15 ± 0.54 m, the maximum error distance is 1.64 m and the minimum error distance is 0.24 m. Comparing the results from the original signals without weighted RSSI, the indoor positioning scheme we proposed reduces 0.47 m error distance averagely. In short, the indoor positioning algorithm can significantly improve the accuracy of indoor location.
Figure 7.
The detection results of falls using the proposed fall detection algorithm.
Figure 7.
The detection results of falls using the proposed fall detection algorithm.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}