1. Introduction
Whether they are natural or man-made, disasters such as hurricanes, earthquakes and terrorist attacks inflict serious risk on humankind. In 2010, the Haitian government reported that that an estimated 316,000 people had died, 300,000 had been injured and 1,000,000 were homeless as a result of the Haiti earthquake. This caused a massive level of devastation and imposed enormous operational challenges on the humanitarian agencies and government. Scientific and reasonable shelter assignment and evacuation routing planning are two important safeguards to minimize the loss from disasters.
Different types of disasters require different types of shelter assignments and evacuation planning. For example, earthquakes require emergency evacuation while typhoons allow early evacuation. By means of modern information technology, the relevant government department can analyze and forecast the path and intensity of a typhoon, which can give people sufficient time to evacuate. However, scientists cannot yet calculate when there will be a major earthquake. When an earthquake comes, many people need to evacuate immediately. To promote the efficiency of disasters rescue and reduce life and economic losses, shelter location is significant to the reasonable planning at the pre-disaster phase and evacuation plans are carried out relying upon the information gained (e.g., earthquake magnitude, volcanic eruptive intensity, fire dangerous grade, etc.) when disasters happen. Topics regarding shelter or evacuation, important aspects of disaster relief, have been frequently considered by researchers, and have appeared in emergency supply planning [
1,
2], shelter location problems [
3,
4,
5], emergency evacuation planning problems [
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26] and shelter location and evacuation routing assignment problems [
4,
5,
8,
9,
10,
11,
12,
16,
27,
28].
Shelter location and evacuation routing operations rely on the boundary between disaster preparedness and disaster response. In line with the framework proposed by [
4], we assume that shelter location and evacuation routing assignments are disaster response operations.
A shelter is a safe facility that protects people from possible damaging effects of a disaster. It can provide people with necessary living conditions (e.g., food, water, medicine, etc.). People usually start leaving their own houses to seek shelters with a sense of panic when they either face or are experiencing dangerous circumstances. Under those circumstances, people may choose the same path to the shelters. This will reduce the traffic capacity of those roads and delay the time taken to reach the shelter. In addition, space within shelters is limited. Overcrowded shelters cause people who may arrive later to seek a new one. This will further aggravate the condition of people who were wounded by the disaster.
The existing evacuation planning and management models are mostly based on traffic assignment models [
29], such as the user equilibrium (UE), the system optimal (SO) and the nearest allocation (NA) approaches. Recently, the Constrained System Optimal (CSO) model [
4,
5] was developed to provide a compromise between the SO and UE/NA approaches. The UE approach assumes that the evacuees act selfishly and have full information about the traffic conditions on every possible route in the evacuation network. Based on these assumptions, in the UE model, every evacuee can find the optimal route to their destination using an objective function of minimizing their travel time. Clearly, the perfect information assumption in the UE approach is strong and may not be valid in the case of a natural disaster, as the real traffic demand is unusual, and it is difficult for evacuees to guess the congestion level on a path. In the NA model, each evacuee uses the shortest path to reach the nearest open shelter sites, whereas this short-sighted assignment will lead to a poor system performance.
The main goal of evacuation agencies and the governments, however, is to avoid congestion and enable the evacuation of the disaster area in a timely manner. This can be achieved through effective planning strategies, the SO model, which distributes traffic over the road network, and shelter assignment. In the SO model, evacuees are assigned to designated safety and evacuation routes as soon as possible to minimize the total evacuation time. The SO solution may not favor the preferences of some evacuees to the benefit of the other evacuees. For example, some evacuees may be allocated to shelters much further away than they would like to go or to routes much longer than they would normally take.
In this article, we focus on emergency evacuation planning operations for a disaster response, which consists of shelter location decisions and evacuation routing assignments in an SO fashion. In this work, evacuation demand is an uncertain parameter, as shelter location decisions should be made before disasters happen. Contrary to the general expectation-based (i.e., risk-neutral) stochastic model, a risk-averse version that incorporates a risk measure called Conditional Value-at-Risk (CVaR) is established to capture the random parameters to minimize the total evacuation time and associated risk. Considering the utilization balance among shelters in uncertain contexts, on the other hand, chance constraints are introduced to ensure that the utilization level of shelters is not less than a threshold within a given level of reliability.
To summarize, the contribution of the present work is four-fold:
- (i)
A two-stage stochastic programming shelter location and evacuation routing assignment (SLERA) model with a chance constraint is developed, in which the demand for evacuees is regarded as random. In the first stage, location decisions are made following some possible demand scenarios. The second-stage decision considers specific evacuation routing assignments concerning available shelters as the actual realization of demand.
- (ii)
Considering the uncertainty of the demand, a risk measure (CVaR) is introduced into the stochastic model to balance the expectations related to the total evacuation time and inherent risk.
- (iii)
To handle the non-linearity objective function of the traffic flow, a second-order cone programming (SOCP) approach is used.
- (iv)
Extensive numerical experiments are carried out to provide practical insight into the proposed modeling approach.
The remainder of this work is organized as follows:
Section 2 reviews some related work on emergency management, especially related to the disaster response, such as shelter locations and evacuation routing. Expectation-based and risk-averse mathematical models for the SLERA problem are given in
Section 3. The solution approach is detailed in
Section 4. We present the computational results of the case study in
Section 5. Finally,
Section 6 concludes this work and indicates some future research directions.
3. Problem Description and Model Formulation
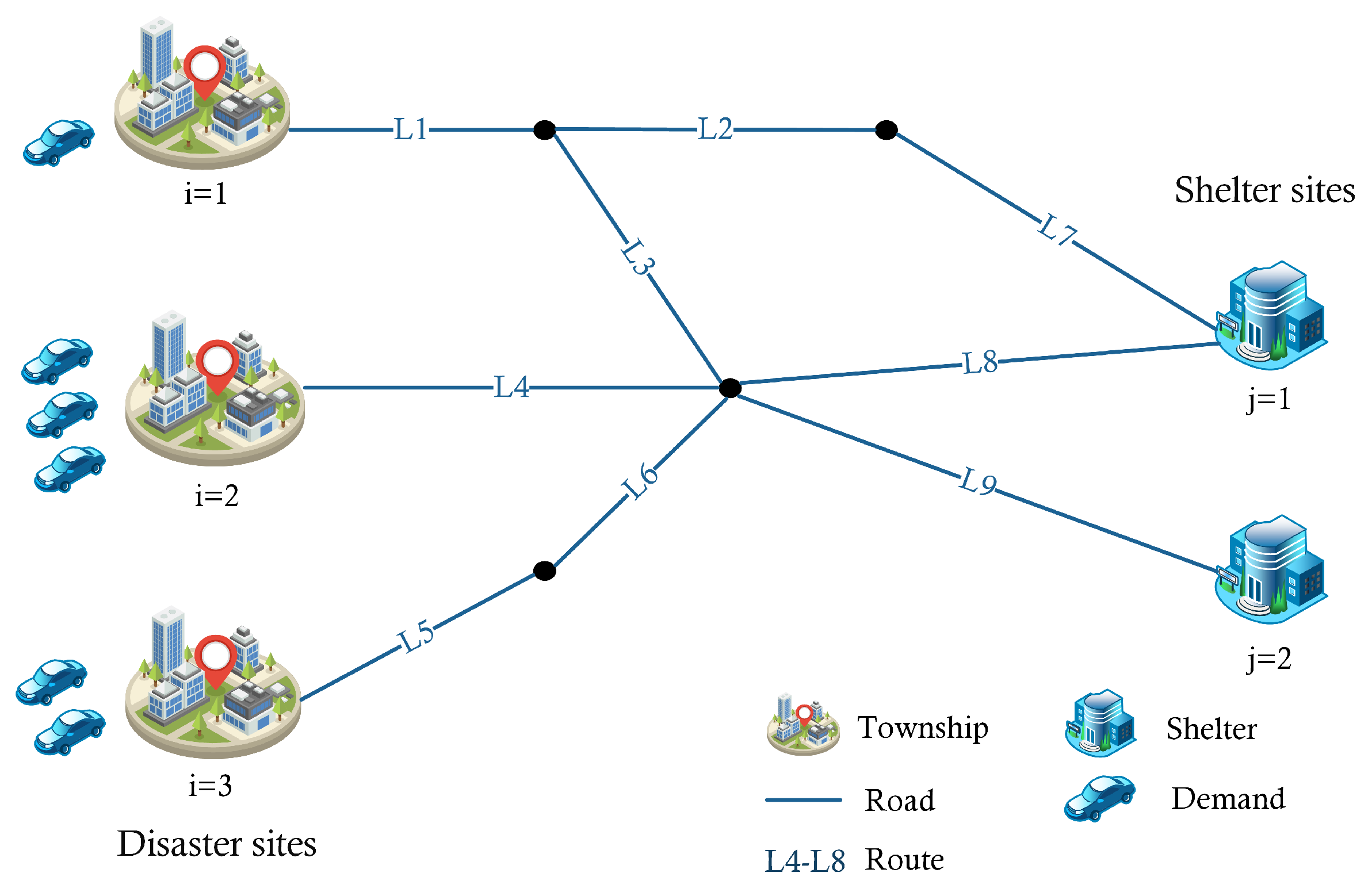
The aim of our emergency evacuation planning problem is to decide the location of
S shelters among the potential sites at the tactical level and the routing assignment of evacuees from stricken regions to safe destinations operationally so that the disaster areas are evacuated as quickly as possible. In this work, we focus on evacuation with private vehicles (i.e., car-based evacuation).
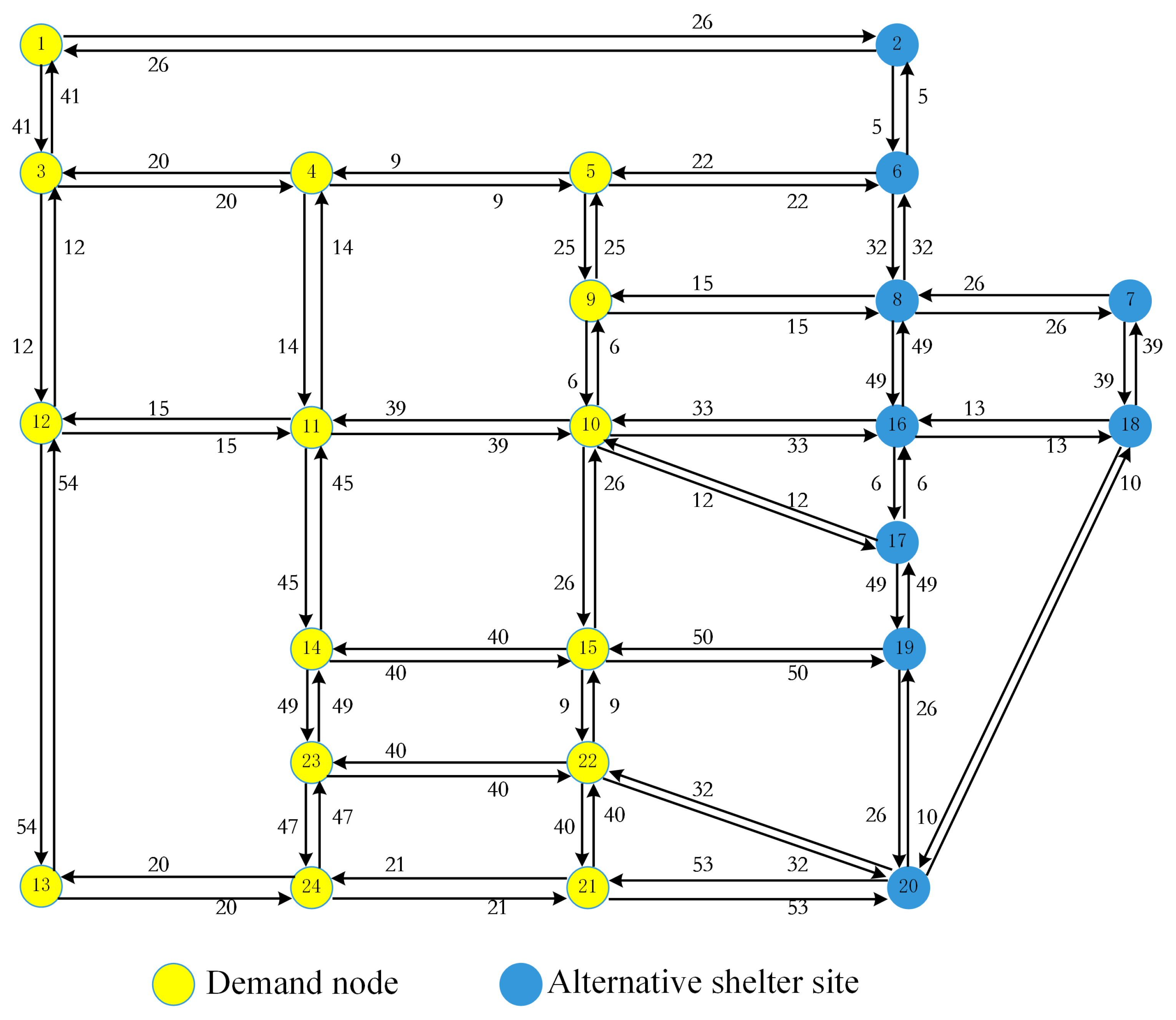
Figure 1 illustrates the evacuation network. The objective of our problem is to minimize the total evacuation time on all road segments.
Before introducing the mathematical model of the SLERA problem, we first detail how to model the travel time. It is generally known that there is a positive and monotonically increasing relationship between travel time and traffic flow, as a large traffic volume will lead to congestion and increase the travel time on roads. Getting a reasonable estimate of the entire evacuation time is the main reason for modeling traffic time on road segments in accordance with corresponding traffic flows. In the literature, there are different functional forms that model the relationship between travel time and traffic flow on a road segment. In particular, the U.S. Bureau of Public Roads (BPR) function has been extensively adopted in evacuation models to estimate the traffic times, for example, in [
4,
5]. Thus, the BPR function is applied in this work as well. In BPR function, the travel time
t is not constant, as the level of congestion has an impact on the travel speed of vehicles, especially during disaster evacuation. According to [
5], travel time
is a monotonically increasing function of the traffic flow
x. The relationship between travel time and traffic flow is formulated as
where
is the travel time when the traffic volume on the road is
x,
c denotes the maximum flow capacity,
is the free-flow travel time at zero volume. The parameters
and
are the tuning coefficients, which determine the shape of the function. The exact values of the coefficients are defined in accordance with the road characteristics, and they are generally taken as 0.15 and 1–5, respectively. When higher flows occur on the link, the coefficient
determines the threshold at which the BPR function rises significantly [
35]. Considering that the evacuated tool is the same type of vehicle, a reasonable smaller value of
is preferred. So, we use
in this work.
3.1. Notation
The notation used throughout the paper is summarized as follows.
Sets:
I: The set of demand nodes where the population at risk is to be evacuated, indexed by i.
J: The set of destination nodes (potential shelter sites) where evacuees reach safety, indexed by j.
R: The set of all evacuation routes.
: The set of alternative routes from demand point to shelter , indexed by r.
L: The set of all road segments in the evacuation network, indexed by l.
: The set of routes passing through road l, indexed by r.
: The set of possible scenarios in a disaster event, indexed by .
Parameters:
: The population of evacuees at demand node in scenario .
: The probability of scenario .
: The capacity of road segment .
: The capacity of shelter .
S: The number of possible shelters.
: The free-flow travel time of road in zero traffic.
: The utilization rate of shelters, where .
: A small value greater than 0.
Variables:
: = 1, if a shelter is located/opened at alternative shelter site ; = 0, otherwise.
: the number of individuals that evacuate from demand node to shelter via route in scenario .
: the traffic flow on road in scenario .
3.2. Expectation-Based Model
Based on the above definition and travel time estimation Equation (
1), firstly, the mathematical formulation of the expectation-based problem is written as follows:
The objective Function (
2) minimizes the expected total evacuation time spent by the evacuees in the network. Constraint (
3) limits the number of open shelters to a pre-specified number
S. Constraint (4) ensures that evacuees are not assigned to a non-open shelter. Constraint (5) guarantees that the capacity of each opened shelter is not exceeded. The minimum utilization rate of each opened shelter
j is constrained by chance Constraint (6), which ensures that the utilization rate is not less than a threshold value
with a specified high probability of
. Constraint (7) ensures that every evacuee from every origin
i is assigned to a shelter and a route leading to that shelter. The set of Constraint (8) computes the traffic flow on every road segment
. Finally, the domains of the variables are restricted by Constraints (9)–(11).
In M1, the objective criterion is expectation-based (i.e., risk-neutral), and the objective function value entirely depends on the scenario set , which captures the randomness under a finite sample distribution space assumption. The expectation-motivated objective function is reasonable and reliable only if the number of realizations of random demand is large enough. In practice, however, it is difficult to take a large number of scenarios into consideration, due to the restriction of solution techniques. Unavoidably, a case exists where the solutions obtained according to the expectation-based model do not perform well in some extreme demand cases, which does not occur in scenario set . To determine the risk of solutions performing badly in exceptional cases, the introduction of a risk measure method to assess the expectation-based objective value is preferred.
3.3. Risk Measure by CVaR
In this subsection, we briefly introduce the concept of CVaR and present a linear programming formulation of CVaR under the assumption that the distribution space of random variables is finite. We recommend readers to refer to [
36,
37,
38] for more details.
As a modeling method, it should be noted that the expectation-based objective Function (
2) only accounts for random scenarios in a finite set
. The performance of solutions obtained from given scenarios will not be guaranteed under certain realizations of random parameters. To ensure an efficient emergency response operation in which optimal decisions present relatively good stability even in worst-scenarios, especially in the context of disaster management, authors have applied indicators such as the Mean-Variance [
39] and CVaR [
38] as risk measures. In particular, CVaR has gradually been adopted in pre-disaster relief network design problems [
40], emergency logistics planning problems during disasters [
2] and disaster location and allocation problems [
41]. In these works, risk measure was adopted to avoid a case where the solutions provided by the risk-neutral model might perform poorly in extreme scenarios (e.g., a very high level of unsatisfied demand under certain realizations of random data).
We firstly introduce the concept of the mean-risk model in relation to general two-stage stochastic programming model considering risk aversion. Then, we present the risk measure definition and the risk-averse model, and finally, we conclude this subsection with a linear representation of the risk measure.
denotes an abstract probability space, in which
is the sample space,
is a
-algebra on
, and
P is a probability measure on
. In the general risk-neutral two-stage stochastic model, (i.e., expectation-based), the sample space
is taken as a finite probability distribution where
. Then, the common expression form of the expectation-based stochastic linear programming problem is written as
where
is the total cost function of the first-stage problem and
is the optimal value of the second-stage problem (also known as the recourse function), which is formulated as
In the above-mentioned problem, “
” is the first-stage decision variable vector (also referred to as a here-and-now decision), such as the location decision variables in this work, which is made before the realization of the actual random parameter
for the elementary event
; “
” is the second-stage variable vector, like the routing assignment variables, that occurs after a realization of
has been identified. Indeed, this risk-neutral approach that optimizes the cost
of the first-stage decision plus the expected cost of the recourse function does not take the risk element into account. The mean-risk model is one of the classical approaches to incorporate the risk measure into a general two-stage stochastic programming model while simultaneously minimizing the risk function. The risk-neutral two-stage framework can be extended to the risk-averse mean-risk version formulated below:
where
is a non-negative trade-off coefficient representing the exchange rate between the mean value and risk, called the
risk coefficient or
risk level. Specially, the objective Function (
14) is risk-neutral when
. For the random variable
, CVaR
denotes the conditional value-at-risk of
at a given confidence level
. The mean-risk model minimizes both the expected cost
and risk measure function CVaR
. The relevant definitions of the risk measure CVaR are presented as follows:
Definition 1. Let represent the cumulative distribution function of a random variable Z. According to [36], the value-at-risk (VaR) at a given confidence level α, denoted by VaR, is defined aswhere . The conditional value-at-risk at a given confidence level
is related to the expectation of
Z under the condition that it exceeds the
-quantile threshold. Its definition is formulated as
CVaR can capture a wide range of risk preferences by altering another risk coefficient
, in particular, the risk-neutral case (
) and the pessimistic worst-case for a sufficiently large value of
.
Z is a random variable that obeys a discretion distribution with finite realizations
and corresponding probabilities
. An alternative definition of CVaR
, which gives a linearization description of CVaR, is restated below [
36].
Definition 2. The conditional value-at-risk of random variable Z at the confidence level α is given aswhere and . By means of linearizing the term in Equation (17), the conditional value-at-risk of random variable Z at the confidence level α can be rewritten assubject to 3.4. Risk-Averse Model
Given the definition of risk measure, a mathematical formulation of the stochastic version considering risk measures can be represented as follows. This is based on model M1 and Equations (
14) and (
18)–(
20):
subject to
In this risk-averse model, smaller values of the risk measure part are preferred, as this indicates the corresponding risk value of the solution’s performance loss in exceptional demand cases. and are two important coefficients that are used to tune the risk preferences for decision makers or the uncertainty level of the decision environment. However, we cannot directly solve this risk-averse stochastic model, because the objection function contains a cubic item , which is a nonlinear objective function. Heuristic techniques or the piecewise linear approximation method are frequently used to handle related nonlinear objective functions occurring in mixed-integer programming (MIP) models. Recently, motivated by the advances in second-order cone programming (SOCP), the nonlinear MIP models were reformulated as corresponding second-order conic mixed-integer programs and then directly solved by off-the-shelf solvers (e.g., CPLEX, Gurobi). In the following section, we describe the SOCP solution approach to problems with the nonlinear objective function.
6. Conclusions
In this work, we studied a shelter location and routing assignment problem under random demand circumstances and introduced a risk-averse stochastic programming optimization model. Our aim was to minimize the total evacuation time using a system optimal style. To handle the non-linearity in the objective value arising from using a traffic assignment model, second-order cone programming was deployed to transfer the non-linearity from the objective function to constraints. In addition, we performed a series of numerical analyses to validate our proposed model and the impacts of key features were discussed for decision making purposes. This emergency management strategy involving risk measure is valuable as it could support plan making on both tactical and operational levels.
There are some further research improvements that could be made. For example, we adopted a system optimal method, in which we assumed that evacuees would comply with the guidelines released by the central authority. In practice, however, the system optimal routing assignment results may be unfavorable to some evacuees, and people’s behaviors in unusual circumstances are ignored. Thus, the incorporation of human behaviors into the optimization model deserves investigation. On the other hand, more scenarios used to describe randomness for which the use of efficient solution algorithms (both exact and heuristic) to handle large-scale scenarios should be captured.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








