Understanding Public Acceptance of Autonomous Vehicles Using the Theory of Planned Behaviour





Abstract
:1. Introduction
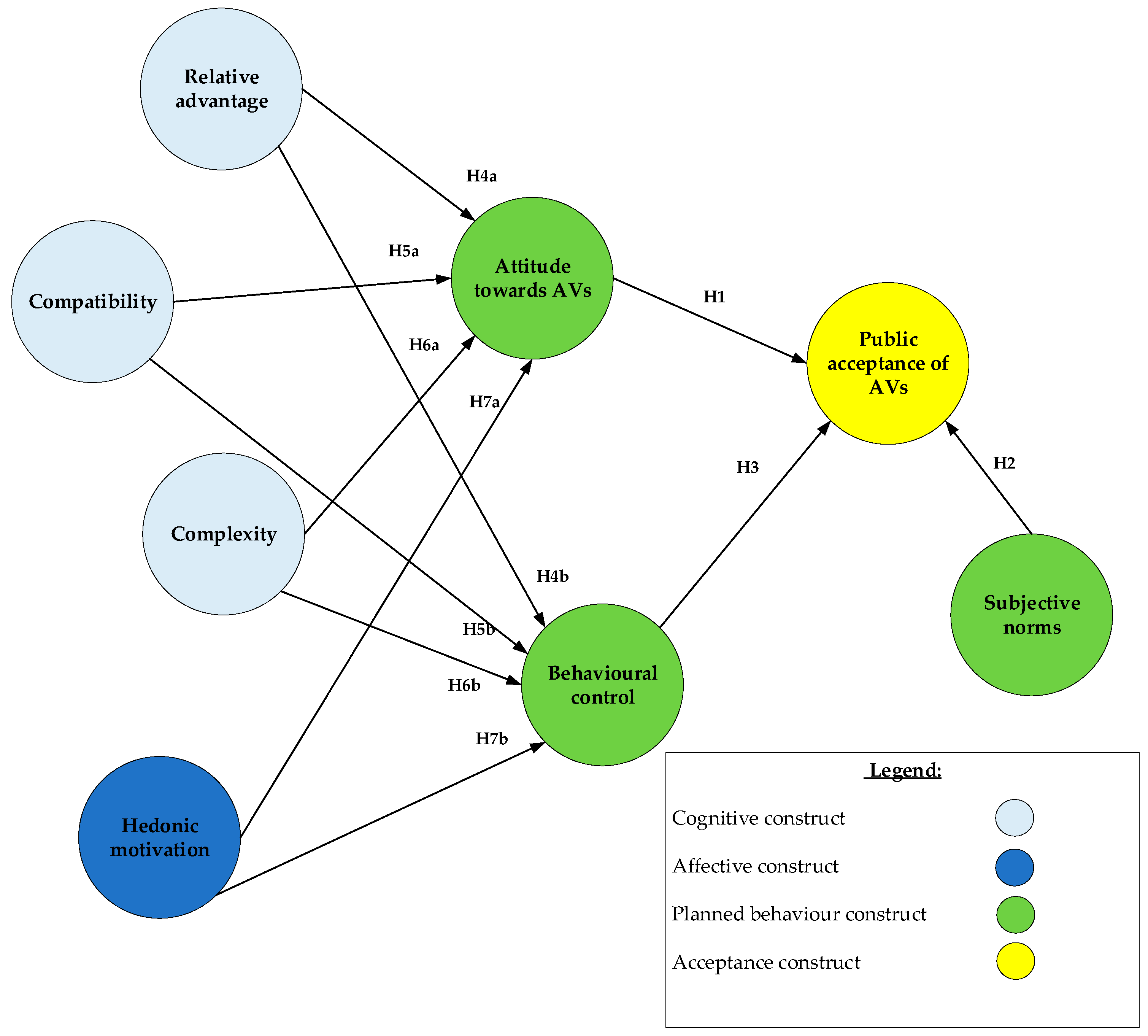
2. Theory, Model and Hypotheses
2.1. The Influence of Attitude on Public Acceptance
2.2. The Influence of Subjective Norms on Public Acceptance
2.3. The Influence of Behavioural Control on Public Acceptance
2.4. The Application of Decomposed TPB
2.4.1. The Influence of Cognitive Attributes on Attitude and Behavioural Control
2.4.2. The Influence of Affective Attributes on Attitude and Behavioural Control
3. Method
3.1. Indicator Selection
3.2. Survey Design and Administration
3.3. Demographics of Respondents
4. Results and Discussion
4.1. Measurement Model Analysis
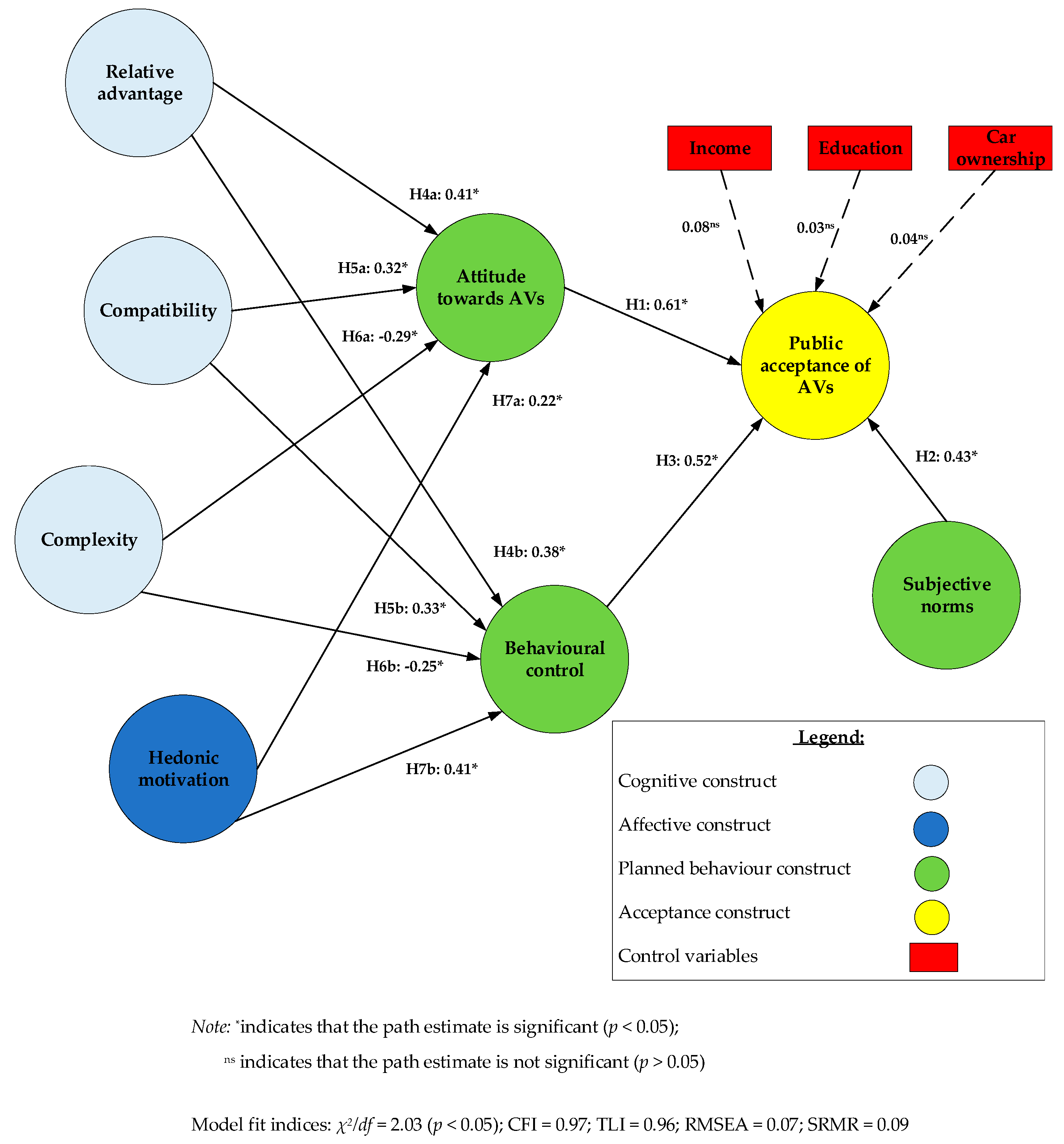
4.2. Structural Model Analysis
4.3. Direct, Indirect and Total Effect Analysis
5. Conclusions
5.1. Summary
5.2. Theoretical Contributions
5.3. Transport Policy Implications
5.4. Limitations and Recommendations
Author Contributions
Funding
Conflicts of Interest
References
- Hawkins, A.J. Cruise postpones plan to launch driverless taxi service in 2019. Available online: https://www.theverge.com/2019/7/24/20707242/cruise-gm-self-driving-taxi-launch-delay-2019 (accessed on 2 September 2019).
- Milakis, D.; Van Arem, B.; Van Wee, B. Policy and society related implications of automated driving: A review of literature and directions for future research. J. Intell. Transp. Syst. 2017, 21, 324–348. [Google Scholar] [CrossRef]
- Becker, F.; Axhausen, K.W. Literature review on surveys investigating the acceptance of automated vehicles. Transportation 2017, 44, 1293–1306. [Google Scholar] [CrossRef] [Green Version]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp Res. A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Payre, W.; Cestac, J.; Delhomme, P. Intention to use a fully automated car: Attitudes and a priori acceptability. Transp. Res. Part. F. Traffic Psychol. Behav. 2014, 27, 252–263. [Google Scholar] [CrossRef] [Green Version]
- Panagiotopoulos, I.; Dimitrakopoulos, G. An empirical investigation on consumers’ intentions towards autonomous driving. Transp. Res. Part C Emerg. Technol. 2018, 95, 773–784. [Google Scholar] [CrossRef]
- Talebian, A.; Mishra, S. Predicting the adoption of connected autonomous vehicles: A new approach based on the theory of diffusion of innovations. Transp. Res. Part C Emerg. Technol. 2018, 95, 363–380. [Google Scholar] [CrossRef]
- Nordhoff, S.; Kyriakidis, M.; van Arem, B.; Happee, R. A multi-level model on automated vehicle acceptance (MAVA): A review-based study. Theor. Issues. Ergon. Sci. 2019, 20, 682–710. [Google Scholar] [CrossRef] [Green Version]
- Nordhoff, S.; de Winter, J.; Payre, W.; van Arem, B.; Happee, R. What impressions do users have after a ride in an automated shuttle? An interview study. Transp. Res. Part F Traffic Psychol. Behav. 2019, 63, 252–269. [Google Scholar] [CrossRef] [Green Version]
- Liljamo, T.; Liimatainen, H.; Pöllänen, M. Attitudes and concerns on automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2018, 59, 24–44. [Google Scholar] [CrossRef]
- Deb, S.; Strawderman, L.; Carruth, D.W.; DuBien, J.; Smith, B.; Garrison, T.M. Development and validation of a questionnaire to assess pedestrian receptivity toward fully autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 84, 178–195. [Google Scholar] [CrossRef]
- Buckley, L.; Kaye, S.-A.; Pradhan, A.K. Psychosocial factors associated with intended use of automated vehicles: A simulated driving study. Accid. Anal. Prev. 2018, 115, 202–208. [Google Scholar] [CrossRef] [PubMed]
- Gkartzonikas, C.; Gkritza, K. What have we learned? A review of stated preference and choice studies on autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 323–337. [Google Scholar] [CrossRef]
- Choi, J.K.; Ji, Y.G. Investigating the importance of trust on adopting an autonomous vehicle. Int. J. Hum Comput. Int. 2015, 31, 692–702. [Google Scholar] [CrossRef]
- Madigan, R.; Louw, T.; Wilbrink, M.; Schieben, A.; Merat, N. What influences the decision to use automated public transport? Using UTAUT to understand public acceptance of automated road transport systems. Transp. Res. Part F Traffic Psychol. Behav. 2017, 50, 55–64. [Google Scholar] [CrossRef]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Lin, R.; Zhang, W. The roles of initial trust and perceived risk in public’s acceptance of automated vehicles. Transp. Res. Part C Emerg. Technol 2019, 98, 207–220. [Google Scholar] [CrossRef]
- Sohn, K.; Kwon, O. Technology acceptance theories and factors influencing artificial Intelligence-based intelligent products. Telemat. Inform. 2020, 47, 101324. [Google Scholar] [CrossRef]
- Haboucha, C.J.; Ishaq, R.; Shiftan, Y. User preferences regarding autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 37–49. [Google Scholar] [CrossRef]
- Hudson, J.; Orviska, M.; Hunady, J. People’s attitudes to autonomous vehicles. Transp. Res. A Policy Pract. 2019, 121, 164–176. [Google Scholar] [CrossRef]
- Yuen, K.F.; Wang, X.; Ng, L.T.W.; Wong, Y.D. An investigation of customers’ intention to use self-collection services for last-mile delivery. Transp. Policy 2018, 66, 1–8. [Google Scholar] [CrossRef]
- Wang, X.; Yuen, K.F.; Wong, Y.D.; Teo, C.-C. Consumer participation in last-mile logistics service: An investigation on cognitions and affects. Int. J. Phys. Distrib. Logist. Manag. 2019, 49, 217–238. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, S.; Wang, J.; Wei, J.; Wang, C. An empirical study of consumers’ intention to use ride-sharing services: Using an extended technology acceptance model. Transportation 2020, 47, 397–415. [Google Scholar] [CrossRef]
- Moons, I.; De Pelsmacker, P. An extended decomposed theory of planned behaviour to predict the usage intention of the electric car: A multi-group comparison. Sustainability 2015, 7, 6212–6245. [Google Scholar] [CrossRef] [Green Version]
- Ajzen, I. The theory of planned behavior. Organ. Behav. Hum. Decis. Process 1991, 50, 179–211. [Google Scholar] [CrossRef]
- Acheampong, R.A.; Cugurullo, F. Capturing the behavioural determinants behind the adoption of autonomous vehicles: Conceptual frameworks and measurement models to predict public transport, sharing and ownership trends of self-driving cars. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 349–375. [Google Scholar] [CrossRef] [Green Version]
- Yuen, K.F.; Wang, X.; Wong, Y.D.; Zhou, Q. Antecedents and outcomes of sustainable shipping practices: The integration of stakeholder and behavioural theories. Transp. Res. E Logist. Transp. Rev. 2017, 108, 18–35. [Google Scholar] [CrossRef]
- Wang, X.; Yuen, K.F.; Wong, Y.D.; Teo, C.C. An innovation diffusion perspective of e-consumers’ initial adoption of self-collection service via automated parcel station. Int. J. Logist. Manag. 2018, 29, 237–260. [Google Scholar] [CrossRef]
- Nordhoff, S.; De Winter, J.; Kyriakidis, M.; Van Arem, B.; Happee, R. Acceptance of driverless vehicles: Results from a large cross-national questionnaire study. J. Adv. Transp. 2018, 5382192. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.-H.; Cheng, C.-M.; Cheng, P.-J. Behavioral intention toward urban eco-land performance assessment models using TPB tests. J. Bus. Res. 2015, 68, 771–776. [Google Scholar] [CrossRef]
- Shih, Y.-Y.; Fang, K. The use of a decomposed theory of planned behavior to study Internet banking in Taiwan. Internet. Res. 2004, 14, 213–223. [Google Scholar] [CrossRef] [Green Version]
- Bandura, A.; Freeman, W.; Lightsey, R. Self-efficacy: The Exercise of Control; Springer: New York, NY, USA, 1999. [Google Scholar]
- Garay, L.; Font, X.; Corrons, A. Sustainability-oriented innovation in tourism: An analysis based on the decomposed theory of planned behavior. J. Travel Res. 2019, 58, 622–636. [Google Scholar] [CrossRef]
- Paddeu, D.; Parkhurst, G.; Shergold, I. Passenger comfort and trust on first-time use of a shared autonomous shuttle vehicle. Transp. Res. Part C Emerg. Technol 2020, 115, 102604. [Google Scholar] [CrossRef]
- Lavasani, M.; Jin, X.; Du, Y. Market Penetration Model for Autonomous Vehicles on the Basis of Earlier Technology Adoption Experience. Transp. Res. Rec. 2016, 2597, 67–74. [Google Scholar] [CrossRef]
- Lee, J.; Lee, D.; Park, Y.; Lee, S.; Ha, T. Autonomous vehicles can be shared, but a feeling of ownership is important: Examination of the influential factors for intention to use autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 107, 411–422. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K.M.J.T. Dynamic ride-sharing and fleet sizing for a system of shared autonomous vehicles in Austin, Texas. Transportation 2018, 45, 143–158. [Google Scholar] [CrossRef]
- Vasebi, S.; Hayeri, Y.M.; Samaras, C.; Hendrickson, C. Low-level automated light-duty vehicle technologies provide opportunities to reduce fuel consumption. Transp. Res. Rec. 2018, 2672, 60–74. [Google Scholar] [CrossRef]
- May, K.R.; Noah, B.E.; Walker, B.N. Driving acceptance: Applying structural equation modeling to in-vehicle automation acceptance. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications Adjunct, Oldenburg, Germany, 24–27 September 2017; pp. 190–194. [Google Scholar]
- Miyazaki, K.; Kijima, K. Complexity in Technology Management: Theoretical Analysis and Case Study of Automobile Sector in Japan. Technol. Forecast. Soc. Chang. 2000, 64, 39–54. [Google Scholar] [CrossRef]
- Nordhoff, S.; van Arem, B.; Happee, R. Conceptual model to explain, predict, and improve user acceptance of driverless podlike vehicles. Transp. Res. Rec. 2016, 2602, 60–67. [Google Scholar] [CrossRef]
- Taylor, S.; Todd, P. Decomposition and crossover effects in the theory of planned behavior: A study of consumer adoption intentions. Int. J. Res. Mark. 1995, 12, 137–155. [Google Scholar] [CrossRef]
- Han, H. Travelers’ pro-environmental behavior in a green lodging context: Converging value-belief-norm theory and the theory of planned behavior. Tour. Manag. 2015, 47, 164–177. [Google Scholar] [CrossRef]
- Jansson, J. Consumer eco-innovation adoption: Assessing attitudinal factors and perceived product characteristics. Bus. Strategy Environ. 2011, 20, 192–210. [Google Scholar] [CrossRef]
- Petschnig, M.; Heidenreich, S.; Spieth, P. Innovative alternatives take action–Investigating determinants of alternative fuel vehicle adoption. Transp. Res. Part A Policy Pract. 2014, 61, 68–83. [Google Scholar] [CrossRef]
- Venkatesh, V.; Thong, J.Y.L.; Xu, X. Consumer acceptance and use of information technology: Extending the unified theory of acceptance and use of technology. MIS Quart. 2012, 36, 157–178. [Google Scholar] [CrossRef] [Green Version]
- Hu, L.T.; Bentler, P.M. Cutoff criteria for fit indexes in covariance structure analysis: Conventional criteria versus new alternatives. Struct. Equ. Model. Multidiscip. J. 1999, 6, 1–55. [Google Scholar] [CrossRef]
- Hair, J.F.; Black, W.C.; Babin, B.J.; Anderson, R.E.; Tatham, R.L. Multivariate Data Analysis; Prentice Hall: Upper Saddle River, NJ, USA, 2010; Volume 7. [Google Scholar]
- Kline, R.B. Principles and Practice of Structural Equation Modeling; The Guilford Press: New Your, NY, USA, 2010. [Google Scholar]
- Krueger, R.; Rashidi, T.H.; Rose, J.M. Preferences for shared autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2016, 69, 343–355. [Google Scholar] [CrossRef]
- Yuen, K.F.; Wong, Y.D.; Ma, F.; Wang, X. The determinants of public acceptance of autonomous vehicles: An innovation diffusion perspective. J. Clean. Prod. 2020, 121904. [Google Scholar] [CrossRef]
- Jing, P.; Huang, H.; Ran, B.; Zhan, F.; Shi, Y. Exploring the factors affecting mode choice Intention of autonomous vehicle based on an extended theory of planned behavior—A case study in China. Sustainability 2019, 11, 1155. [Google Scholar] [CrossRef] [Green Version]
- Hein, D.; Rauschnabel, P.; He, J.; Richter, L.; Ivens, B. What drives the adoption of autonomous cars? In Proceedings of the ICIS 2018 Proceedings, San Francisco, CA, USA, 13–16 December 2018. [Google Scholar]

{kind=link}
{kind=link}
| Constructs | ID | Indicator | Adapted Source |
|---|---|---|---|
| Attitude (ATD) | ATD1 | I dislike (1)/like (7) the idea of using an autonomous vehicle (AV) | Taylor and Todd [41] |
| ATD2 | Buying an AV would be a foolish (1)/wise (7) idea | ||
| ATD3 | I think buying an AV is a bad (1)/good (7) idea | ||
| ATD4 | Using an AV to fulfil my daily travel needs is a bad (1)/good (7) idea | ||
| Subjective norms (SBN) | SBN1 | People who are important to me would want me to buy an AV | Moons and De Pelsmacker [23] Glanz et al. (2008) |
| SBN2 | People who are important to me would want me to use an AV | ||
| SBN3 | I would comply with the demands of people who are important to me to buy an AV | ||
| SBN4 | I would comply with the demands of people who are important to me to use an AV | ||
| Behavioural control (BEC) | BEC1 | Whether or not I use an AV is completely up to me | Han [42] |
| BEC2 | I have resources, time, and opportunities to use an AV | ||
| BEC3 | I am confident that if I want, I can learn and use an AV | ||
| Relative advantage (RLA) | RLA1 | AVs would solve problems that I have encountered with conventional cars. | Jansson [43] Petschnig, et al. [44] |
| RLA2 | AVs would reduce the time that I need to get to places. | ||
| RLA3 | AVs would allow better access to my intended destinations. | ||
| RLA4 | AVs would be an environmentally friendly option. | ||
| RLA5 | AVs would be more advantageous compared to using conventional cars. | ||
| Compatibility (COM) | COM1 | AVs would be in line with my beliefs. | Moons and De Pelsmacker [23] |
| COM2 | AVs would fit well with my driving habits. | ||
| COM3 | AVs would be compatible with my mobility needs. | ||
| COM4 | AVs would suit me well. | ||
| COM5 | AVs would be in line with my everyday life. | ||
| Complexity (CPL) | CPL1 | AVs would be difficult to use. | Yuen, Wang, Ng and Wong [20] |
| CPL2 | AVs would be difficult to learn how to use. | ||
| CPL3 | AVs would be frustrating to use. | ||
| CPL4 | AVs would be cumbersome to use. | ||
| CPL5 | AVs would require a lot of effort to use. | ||
| Hedonic motivation (HMT) | HMT1 | Using AVs would be fun | Venkatesh, et al. [45] |
| HMT2 | Using AVs would be enjoyable | ||
| HMT3 | Using AVs would be very entertaining | ||
| Acceptance (ACP) | ACP1 | I would consider using AVs when they are available in the market. | Choi and Ji [14] |
| ACP2 | I would recommend AVs to my family and peers. | ||
| ACP3 | I would encourage others to use AVs. | ||
| ACP4 | I have positive things to say about AVs. |
| Characteristics | Items | Frequency (n = 526) | Percentage (%) |
|---|---|---|---|
| Gender | Male Female | 254 272 | 48 52 |
| Age (years) | 18 *–30 30–40 40–50 50–60 >60 | 186 124 86 88 42 | 35 24 16 17 8 |
| Education level | Elementary or lower High school Bachelor Postgraduate | 68 86 256 116 | 13 16 49 22 |
| Annual income (million KRW) | <10 10–40 40–80 >80 m | 116 223 147 40 | 22 42 28 8 |
| Number of vehicles owned | 0 1 2 >2 | 210 256 50 10 | 40 49 10 1 |
| Driving experience (years) | No license <1 1–5 5–10 >10 | 101 56 133 156 80 | 19 11 25 30 15 |
| Construct | Indicator | λ | AVE | CR |
|---|---|---|---|---|
| Attitude (ATD) | ATD1 ATD2 ATD3 ATD4 | 0.84 0.89 0.91 0.86 | 0.77 | 0.93 |
| Subjective norms (SBN) | SBN1 SBN2 SBN3 SBN4 | 0.87 0.86 0.84 0.89 | 0.75 | 0.92 |
| Behavioural control (BEC) | BEC1 BEC2 BEC3 | 0.92 0.94 0.93 | 0.87 | 0.95 |
| Relative advantage (RLA) | RLA1 RLA2 RLA3 RLA4 RLA5 | 0.72 0.76 0.84 0.88 0.82 | 0.65 | 0.90 |
| Subjective norms (SBN) | COM1 COM2 COM3 COM4 COM5 | 0.73 0.86 0.95 0.91 0.80 | 0.73 | 0.93 |
| Complexity (CPL) | CPL1 CPL2 CPL3 CPL4 CPL5 | 0.86 0.84 0.76 0.72 0.88 | 0.66 | 0.91 |
| Hedonic motivation (HMT) | HMT1 HMT2 HMT3 | 0.79 0.87 0.89 | 0.72 | 0.89 |
| Acceptance(ACP) | ACP1 ACP2 ACP3 ACP4 | 0.92 0.88 0.93 0.90 | 0.82 | 0.95 |
| ATD | SBN | BEC | RLA | COM | CPL | HMT | ACP | |
|---|---|---|---|---|---|---|---|---|
| ATD | 0.77 | 0.19 | 0.03 | 0.03 | 0.17 | 0.38 | 0.05 | 0.02 |
| SBN | 0.23 | 0.75 | 0.02 | 0.01 | 0.35 | 0.21 | 0.01 | 0.03 |
| BEC | 0.15 | 0.13 | 0.87 | 0.01 | 0.07 | 0.07 | 0.05 | 0.03 |
| RLA | 0.46 | 0.05 | 0.42 | 0.65 | 0.24 | 0.10 | 0.04 | 0.03 |
| COM | 0.42 | 0.03 | 0.39 | 0.44 | 0.73 | 0.38 | 0.04 | 0.06 |
| CPL | –0.38 | –0.07 | –0.32 | –0.16 | –0.15 | 0.66 | 0.52 | 0.26 |
| HMT | 0.32 | 0.10 | 0.49 | 0.08 | 0.07 | –0.08 | 0.72 | 0.42 |
| ACP | 0.73 | 0.56 | 0.63 | 0.07 | 0.10 | –0.10 | 0.09 | 0.82 |
| Endogenous (j) | Attitude (1) | Behavioural Control (2) | Public Acceptance (3) | |
|---|---|---|---|---|
| Exogenous (i) | ||||
| Direct effects (aij) of … | ||||
| relative advantage (1) | 0.41 | 0.38 | — | |
| compatibility (2) | 0.32 | 0.33 | — | |
| complexity (3) | −0.29 | −0.25 | — | |
| hedonic motivation (4) | 0.22 | 0.41 | — | |
| attitude (5) | — | — | 0.61 | |
| behavioural control (6) | — | — | 0.52 | |
| subjective norms (7) | — | — | 0.43 | |
| Indirect effects (bij) of … | ||||
| relative advantage (1) | — | — | 0.45 | |
| compatibility (2) | — | — | 0.37 | |
| complexity (3) | — | — | −0.31 | |
| hedonic motivation (4) | — | — | 0.35 | |
| attitude (5) | — | — | — | |
| behavioural control (6) | — | — | — | |
| subjective norms (7) | — | — | — | |
| Total effects (cij) of … | ||||
| relative advantage (1) | 0.41 | 0.38 | 0.45 | |
| compatibility (2) | 0.32 | 0.33 | 0.37 | |
| complexity (3) | −0.29 | −0.25 | −0.31 | |
| hedonic motivation (4) | 0.22 | 0.41 | 0.35 | |
| attitude (5) | — | — | 0.61 | |
| behavioural control (6) | — | — | 0.52 | |
| subjective norms (7) | — | — | 0.43 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuen, K.F.; Chua, G.; Wang, X.; Ma, F.; Li, K.X. Understanding Public Acceptance of Autonomous Vehicles Using the Theory of Planned Behaviour. Int. J. Environ. Res. Public Health 2020, 17, 4419. https://doi.org/10.3390/ijerph17124419
Yuen KF, Chua G, Wang X, Ma F, Li KX. Understanding Public Acceptance of Autonomous Vehicles Using the Theory of Planned Behaviour. International Journal of Environmental Research and Public Health. 2020; 17(12):4419. https://doi.org/10.3390/ijerph17124419
Chicago/Turabian StyleYuen, Kum Fai, Grace Chua, Xueqin Wang, Fei Ma, and Kevin X. Li. 2020. "Understanding Public Acceptance of Autonomous Vehicles Using the Theory of Planned Behaviour" International Journal of Environmental Research and Public Health 17, no. 12: 4419. https://doi.org/10.3390/ijerph17124419
APA StyleYuen, K. F., Chua, G., Wang, X., Ma, F., & Li, K. X. (2020). Understanding Public Acceptance of Autonomous Vehicles Using the Theory of Planned Behaviour. International Journal of Environmental Research and Public Health, 17(12), 4419. https://doi.org/10.3390/ijerph17124419