Comparing Single-Objective Optimization Protocols for Calibrating the Birds Nest Aquifer Model—A Problem Having Multiple Local Optima

Abstract
:1. Introduction
2. Materials and Methods
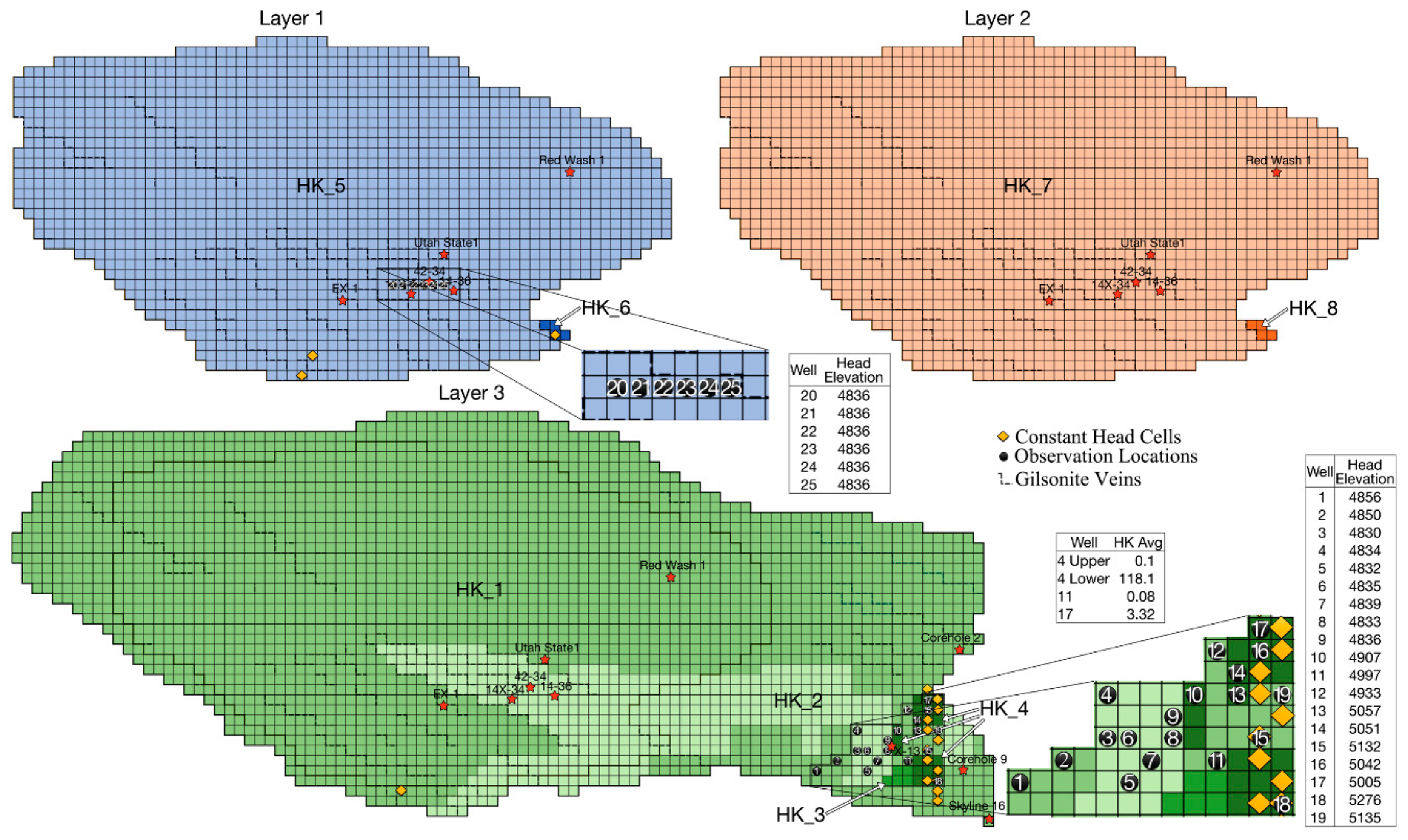
Site
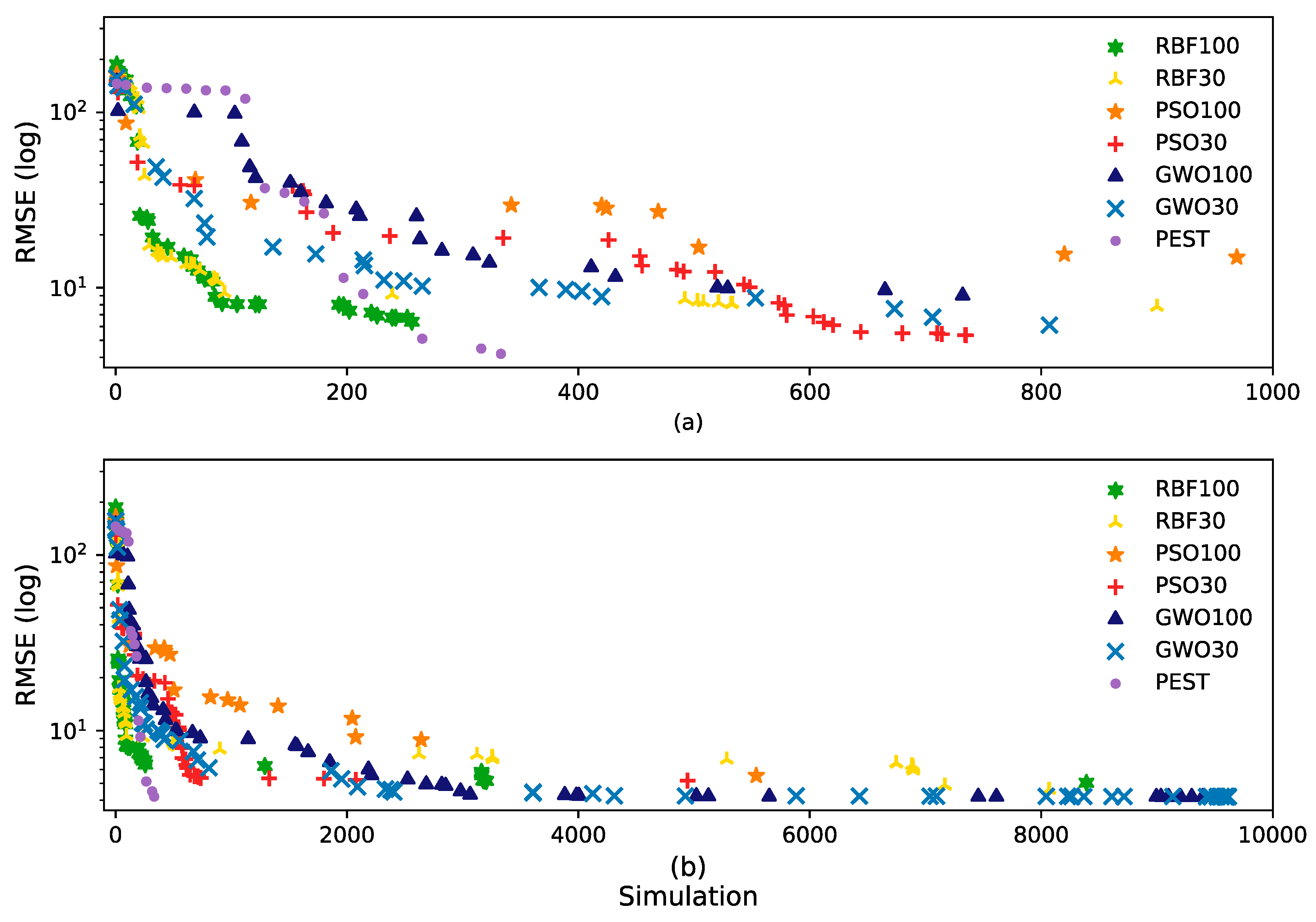
3. Results
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Skahill, B.E.; Baggett, J.S.; Frankenstein, S.; Downer, C.W. More efficient PEST compatible model independent model calibration. Environ. Model. Softw. 2009, 24, 517–529. [Google Scholar] [CrossRef]
- Mbonimpa, E.G.; Gautam, S.; Lai, L.; Kumar, S.; Bonta, J.V.; Wang, X.; Rafique, R. Combined PEST and Trial–Error approach to improve APEX calibration. Comput. Electron. Agric. 2015, 114, 296–303. [Google Scholar] [CrossRef]
- Waterloo Hydrologic Visual MODFLOW Flex; Waterloo Hydrogeologic: Waterloo, ON, Canada, 2019.
- Rumbaugh, J.O.; Rumbaugh, D.B. Groundwater Vistas; Environmental Simulations, Inc.: Leesport, PA, USA, 2017. [Google Scholar]
- Chiang, E. Processing Modflow 10.0.22: A Graphical User Interface for MODFLOW, MODPATH, MT3D, PEST, SEAWAT, and ZoneBudget; Simcore Software: Irvine, CA, USA, 2019. [Google Scholar]
- Aquaveo, L.L.C. Groundwater Modeling System Version 10.0.14 (64-bit), Build Date, Mar 4, 2016; Aquaveo, L.L.C.: Provo, UT, USA, 2016. [Google Scholar]
- Solomatine, D.P.; Dibike, Y.B.; Kukuric, N. Automatic calibration of groundwater models using global optimization techniques. Hydrol. Sci. J. 1999, 44, 879–894. [Google Scholar] [CrossRef] [Green Version]
- Mugunthan, P.; Shoemaker, C.A.; Regis, R.G. Comparison of function approximation, heuristic, and derivative-based methods for automatic calibration of computationally expensive groundwater bioremediation models: COMPARISON OF OPTIMIZATION METHODS. Water Resour. Res. 2005, 41. [Google Scholar] [CrossRef] [Green Version]
- Skahill, B.E.; Doherty, J. Efficient accommodation of local minima in watershed model calibration. J. Hydrol. 2006, 329, 122–139. [Google Scholar] [CrossRef]
- Blasone, R.-S.; Madsen, H.; Rosbjerg, D. Parameter estimation in distributed hydrological modelling: Comparison of global and local optimisation techniques. Nord. Hydrol. 2007, 38, 451. [Google Scholar] [CrossRef] [Green Version]
- Ng, T.L.; Eheart, J.W.; Cai, X.M. Comparative Calibration of a Complex Hydrologic Model by Stochastic Methods GLUE and PEST. Trans. ASABE 2010, 53, 1773–1786. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Franssen, H.J.H.; Kinzelbach, W. Ensemble Kalman filtering versus sequential self-calibration for inverse modelling of dynamic groundwater flow systems. J. Hydrol. 2009, 365, 261–274. [Google Scholar] [CrossRef]
- Yoon, H.; Hart, D.B.; McKenna, S.A. Parameter estimation and predictive uncertainty in stochastic inverse modeling of groundwater flow: Comparing null-space Monte Carlo and multiple starting point methods: NULL-SPACE MONTE CARLO AND MULTIPLE STARTING POINT. Water Resour. Res. 2013, 49, 536–553. [Google Scholar] [CrossRef]
- Haddad, O.B.; Tabari, M.M.R.; Fallah-Mehdipour, E.; Mariño, M.A. Groundwater Model Calibration by Meta-Heuristic Algorithms. Water Resour. Manag. 2013, 27, 2515–2529. [Google Scholar] [CrossRef]
- Thomas, A.; Eldho, T.I.; Rastogi, A.K.; Majumder, P. A comparative study in aquifer parameter estimation using MFree point collocation method with evolutionary algorithms. J. Hydroinf. 2019, 21, 455–473. [Google Scholar] [CrossRef]
- Majumder, P.; Eldho, T.I. Artificial Neural Network and Grey Wolf Optimizer Based Surrogate Simulation-Optimization Model for Groundwater Remediation. Water Resour. Manag. 2020. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the Proceedings of ICNN’95—International Conference on Neural Networks; IEEE: Perth, WA, Australia; p. 1995.
- Matott, L.S.; Rabideau, A.J.; Craig, J.R. Pump-and-treat optimization using analytic element method flow models. Adv. Water Resour. 2006, 29, 760–775. [Google Scholar] [CrossRef]
- Mategaonkar, M.; Eldho, T.I. Groundwater remediation optimization using a point collocation method and particle swarm optimization. Environ. Model. Softw. 2012, 32, 37–48. [Google Scholar] [CrossRef]
- Gaur, S.; Chahar, B.R.; Graillot, D. Analytic elements method and particle swarm optimization based simulation–optimization model for groundwater management. J. Hydrol. 2011, 402, 217–227. [Google Scholar] [CrossRef]
- Faris, H.; Aljarah, I.; Al-Betar, M.A.; Mirjalili, S. Grey wolf optimizer: A review of recent variants and applications. Neural Comput. Appl. 2018, 30, 413–435. [Google Scholar] [CrossRef]
- Eriksson, D.; Bindel, D.; Shoemaker, C.A. pySOT and POAP: An event-driven asynchronous framework for surrogate optimization. arXiv 2019, arXiv:1908.00420. [Google Scholar]
- Regis, R.G.; Shoemaker, C.A. A Stochastic Radial Basis Function Method for the Global Optimization of Expensive Functions. Inf. J. Comput. 2007, 19, 497–509. [Google Scholar] [CrossRef]
- Regis, R.G.; Shoemaker, C.A. Combining radial basis function surrogates and dynamic coordinate search in high-dimensional expensive black-box optimization. Eng. Optim. 2013, 45, 529–555. [Google Scholar] [CrossRef]
- Pyswarm. Available online: https://github.com/tisimst/pyswarm (accessed on 28 June 2019).
- SwarmPackagePy. Available online: https://github.com/SISDevelop/SwarmPackagePy (accessed on 28 June 2019).
- Holmes, W.F.; Kimball, B.A. Ground Water in the Southeastern Uinta Basin, Utah and Colorado, U.S. Geological Survey Water-Supply Paper 2248; U.S. Geological Survey: Reston, VA, USA, 1983; p. 164. [Google Scholar]
- Vanden Berg, M.D.; Lehle, D.R.; Carney, S.M.; Morgan, C. Geological Characterization of the Birds Nest Aquifer, Unita Basin, Utah: Assessment of the Aquifer’s Potential as a Saline Water Disposal Zone; Utah Geological Survey: Salt Lake City, UT, USA, 2013; ISBN 978-1-55791-874-1. [Google Scholar]
- Final Environmental Baseline Report: Federal Prototype Oil Shale Leasing Program Tracts UA and UB. Utah: White River Shale Project; VTN Colorado, Inc.: Aurora, CO, USA, 1977.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optimizer: | PSO | GWO | DRB |
|---|---|---|---|
| Python Package: | Pyswarm | SwarmPackagePy | PySOT |
| Common Inputs: | Number of dimensions; Upper and lower bounds; Max number of iterations; Number of optimizer agents | ||
| Additional Inputs: | Scaling factors: particle velocity, search away from best position of each particle, search away from best position of swarm; minimum step size before search termination; minimum change of swarm’s best objective value before search termination | Kernel object; polynomial tail object; regularization parameter; | |
| Initial Strategy: | PSO chooses decision variables randomly within the set bounds. | GWO chooses decision variables randomly within the set bounds. | DRB chooses decision variables based on a Symmetric Latin Hypercube design. |
| Number of MODFLOW simulations: | agents(1+iterations) | iterations * agents + 2(iterations + agents) | iterations |
| Search Methods: | Nature-based bird flocking and swarming theory | Nature-based social hierarchy and hunting behavior of grey wolves | Surrogate Model, perturbs only a subset of current best solution |
| Variables | DRB100 | DRB30 | PSO100 | PSO30 | GWO100 | GWO30 | PEST |
|---|---|---|---|---|---|---|---|
| Time (s) Avg | 2955 | 3005 | 3082 | 3197 | 3010 | 3053 | 114 |
| Time (s) Min | 2918 | 2955 | 2066 | 2507 | 1768 | 1762 | 12 |
| RMSE (ft/d) Avg | 5.61 | 5.39 | 9.14 | 8.93 | 4.41 | 4.25 | 88.82 |
| RMSE (ft/d) Min | 5.03 | 4.59 | 5.52 | 5.18 | 4.19 | 4.19 | 4.19 |
| σ | 0.29 | 0.53 | 3.36 | 2.04 | 0.14 | 0.04 | 20.43 |
| Range (ft/d) | 1.15 | 1.90 | 11.60 | 8.48 | 0.50 | 0.12 | 186.55 |
| Iteration no. of last RMSE Improvement | 8390 | 8068 | 5537 | 4943 | 9569 | 9618 | 333 |
| RMSE | HK_1 | HK_2 | HK_3 | HK_4 | HK_5 | HK_6 | HK_7 | HK_8 | |
| DRB100 | 5.03 | 37.97 | 0.05 | 0.41 | 0.11 | 78.69 | 60.64 | 61.01 | 49.33 |
| DRB30 | 4.59 | 69.08 | 0.06 | 0.44 | 0.14 | 74.70 | 12.15 | 17.77 | 0.34 |
| PSO100 | 5.52 | 97.31 | 0.02 | 50.63 | 0.62 | 88.09 | 116.36 | 8.52 | 42.07 |
| PSO30 | 5.18 | 33.90 | 0.05 | 0.32 | 0.11 | 118.00 | 66.45 | 45.38 | 92.64 |
| GWO100 | 4.19 | 86.96 | 0.06 | 0.45 | 0.14 | 45.94 | 6.88 | 0.02 | 0.19 |
| GWO30 | 4.19 | 117.73 | 0.06 | 0.45 | 0.15 | 1.78 | 2.13 | 11.08 | 0.20 |
| PEST | 4.19 | 118.00 | 0.06 | 0.45 | 0.14 | 0.32 | 0.83 | 11.27 | 0.22 |
| Upper Bound | 118.00 | 118.00 | 118.00 | 118.00 | 118.00 | 118.00 | 118.00 | 118.00 | |
| Lower Bound | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 |
| HK_1 | HK_2 | HK_3 | HK_4 | HK_5 | HK_6 | HK_7 | HK_8 | |
| DRB100 | 18.27 | 0.017 | 0.30 | 0.067 | 32.90 | 35.80 | 19.03 | 18.88 |
| DRB30 | 18.73 | 0.023 | 0.24 | 0.11 | 28.86 | 37.87 | 34.73 | 30.93 |
| PSO100 | 21.89 | 21.05 | 29.30 | 43.75 | 37.04 | 35.73 | 26.13 | 37.06 |
| PSO30 | 31.38 | 12.86 | 39.05 | 37.54 | 39.36 | 39.57 | 33.49 | 32.66 |
| GWO100 | 27.21 | 0.0010 | 0.007 | 0.0030 | 39.39 | 5.53 | 32.66 | 2.50 |
| GWO30 | 0.21 | 0.0010 | 0.011 | 0.0022 | 19.14 | 3.44 | 32.18 | 3.70 |
| PEST | 47.69 | 24.78 | 41.70 | 25.00 | 39.17 | 21.45 | 46.65 | 34.45 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lyons, R.T.; Peralta, R.C.; Majumder, P. Comparing Single-Objective Optimization Protocols for Calibrating the Birds Nest Aquifer Model—A Problem Having Multiple Local Optima. Int. J. Environ. Res. Public Health 2020, 17, 853. https://doi.org/10.3390/ijerph17030853
Lyons RT, Peralta RC, Majumder P. Comparing Single-Objective Optimization Protocols for Calibrating the Birds Nest Aquifer Model—A Problem Having Multiple Local Optima. International Journal of Environmental Research and Public Health. 2020; 17(3):853. https://doi.org/10.3390/ijerph17030853
Chicago/Turabian StyleLyons, Richard T., Richard C. Peralta, and Partha Majumder. 2020. "Comparing Single-Objective Optimization Protocols for Calibrating the Birds Nest Aquifer Model—A Problem Having Multiple Local Optima" International Journal of Environmental Research and Public Health 17, no. 3: 853. https://doi.org/10.3390/ijerph17030853
APA StyleLyons, R. T., Peralta, R. C., & Majumder, P. (2020). Comparing Single-Objective Optimization Protocols for Calibrating the Birds Nest Aquifer Model—A Problem Having Multiple Local Optima. International Journal of Environmental Research and Public Health, 17(3), 853. https://doi.org/10.3390/ijerph17030853