
Simulation Study for Overturning and Rollover Characteristics of a Tractor with an Implement on a Hard Surface




Abstract
:1. Introduction
2. Materials and Methods
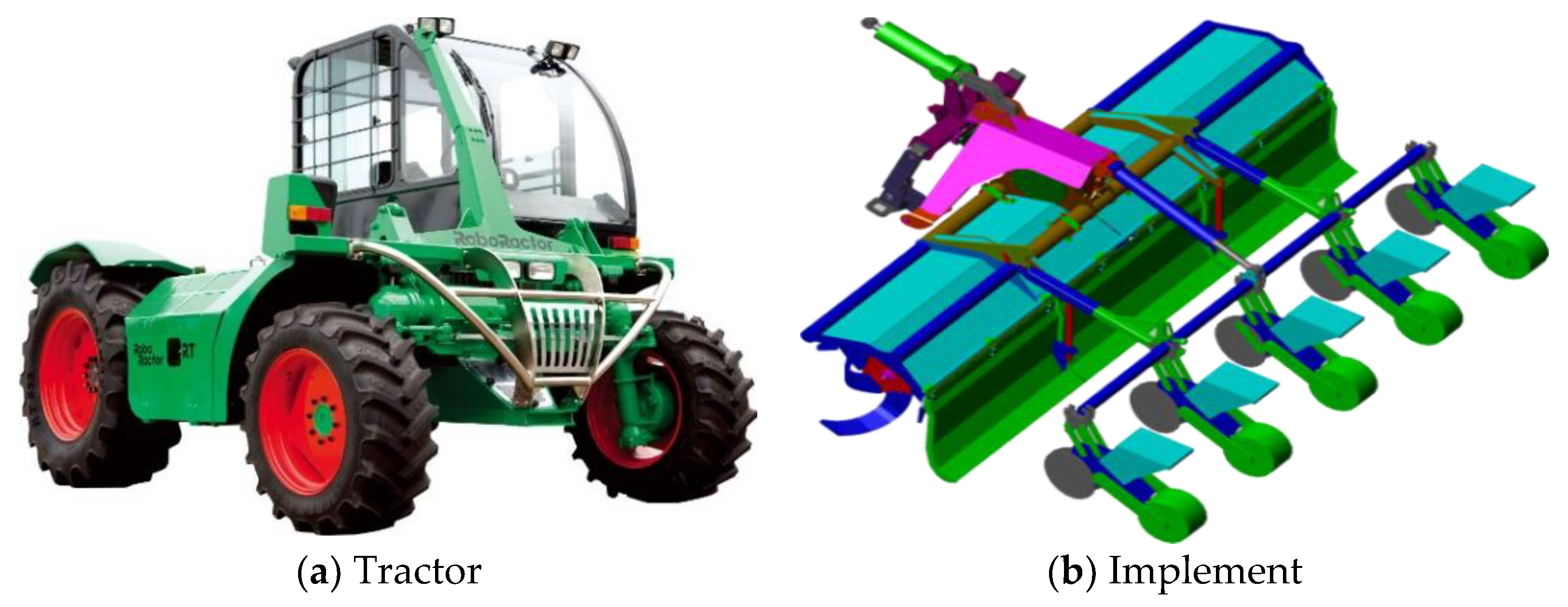
2.1. Tractor and Implement Used
2.2. Modeling for the Dynamic Simulation
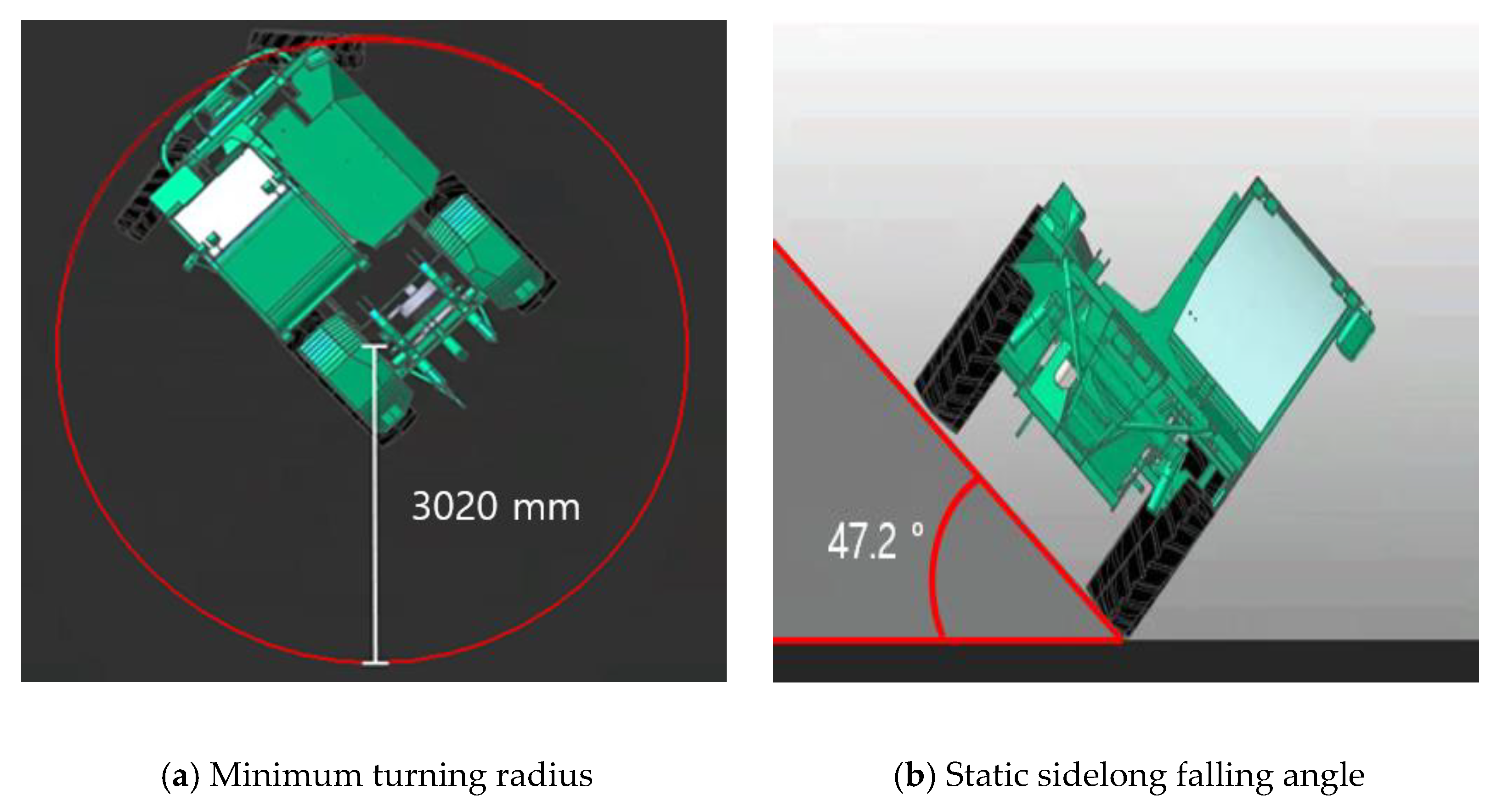
2.3. Verification of the Simulation Model [21]
2.4. Simulation Conditions
3. Results and Discussion
3.1. Position of Center of Gravity
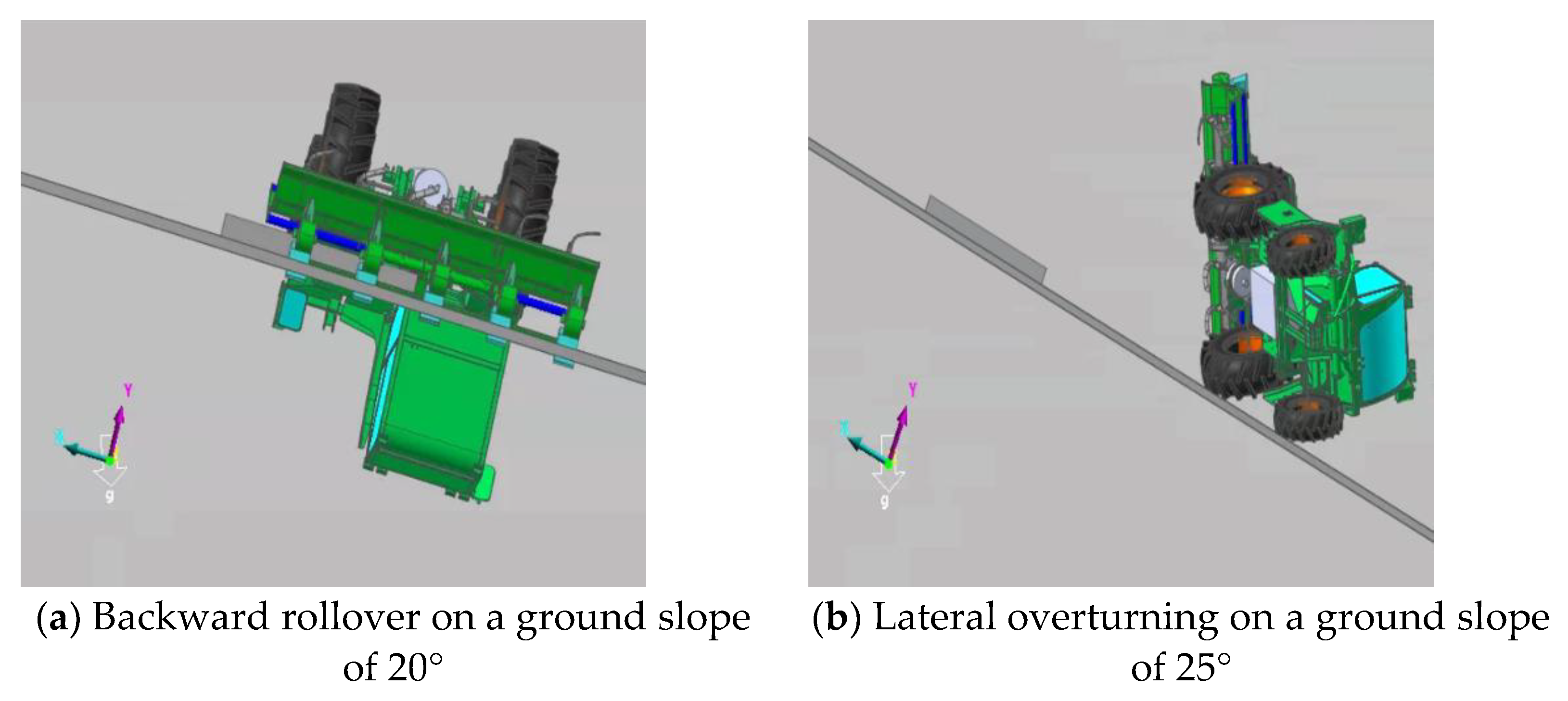
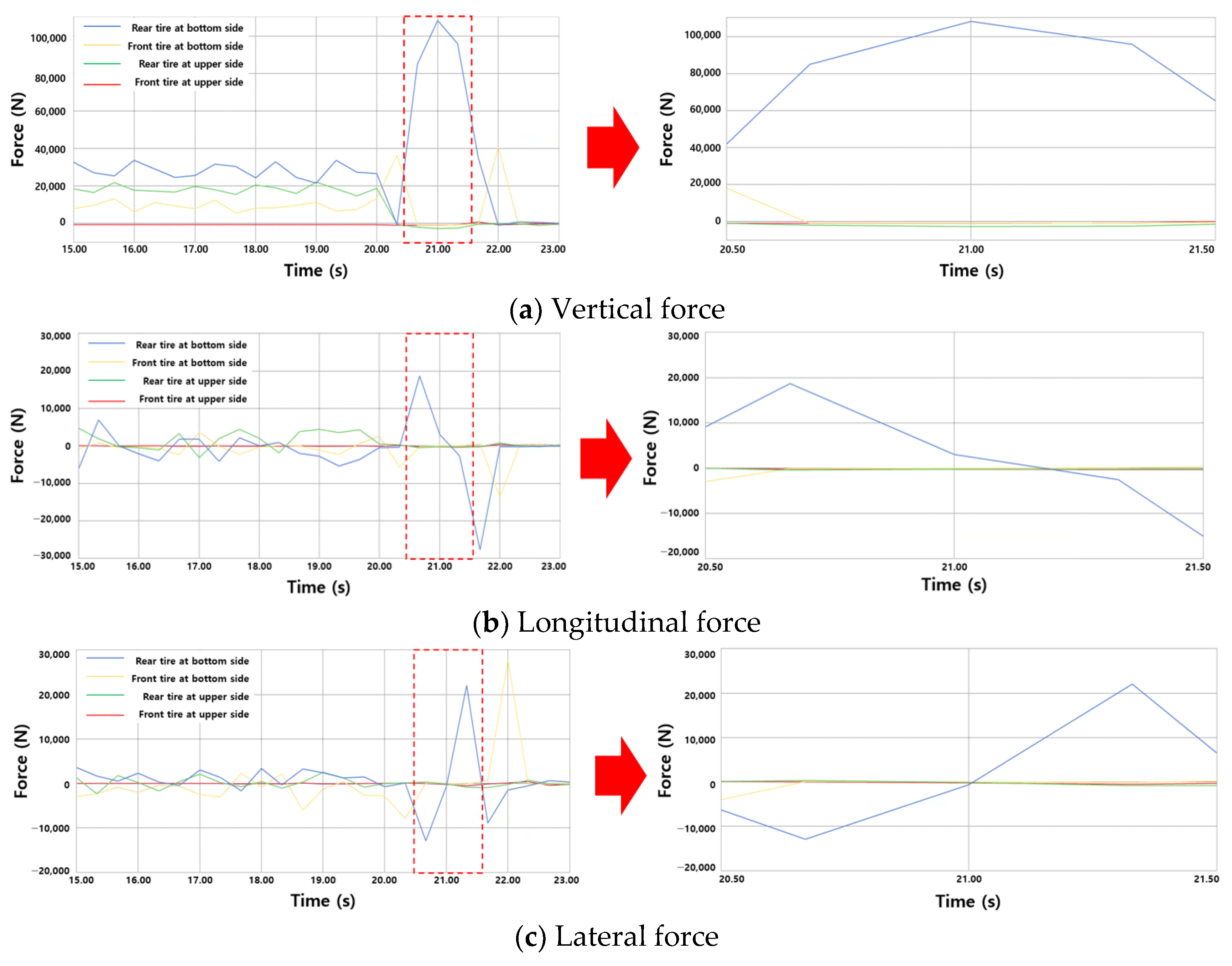
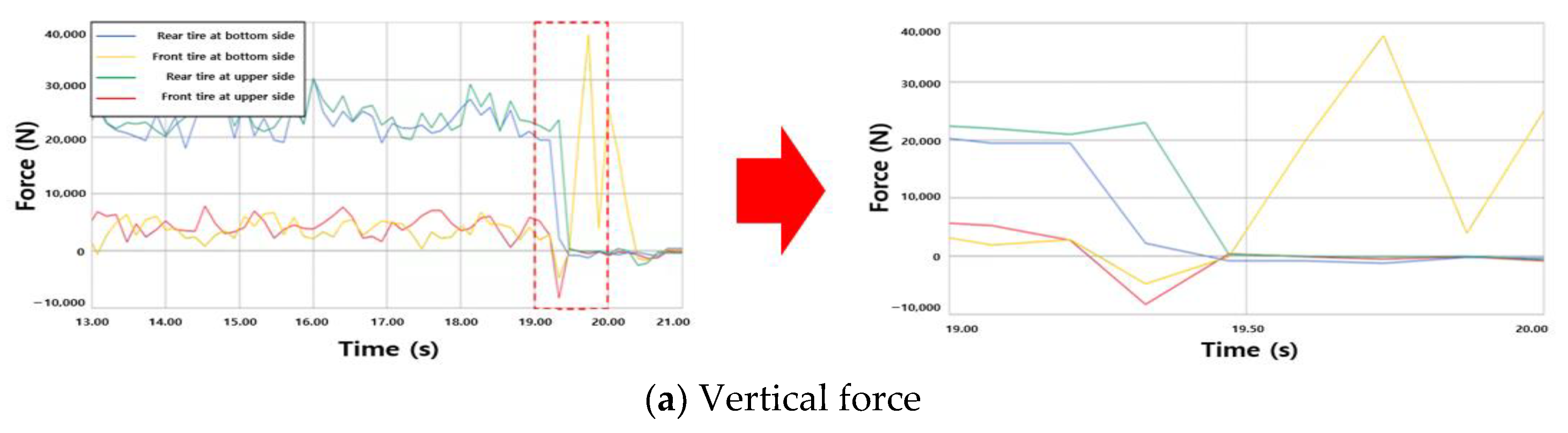
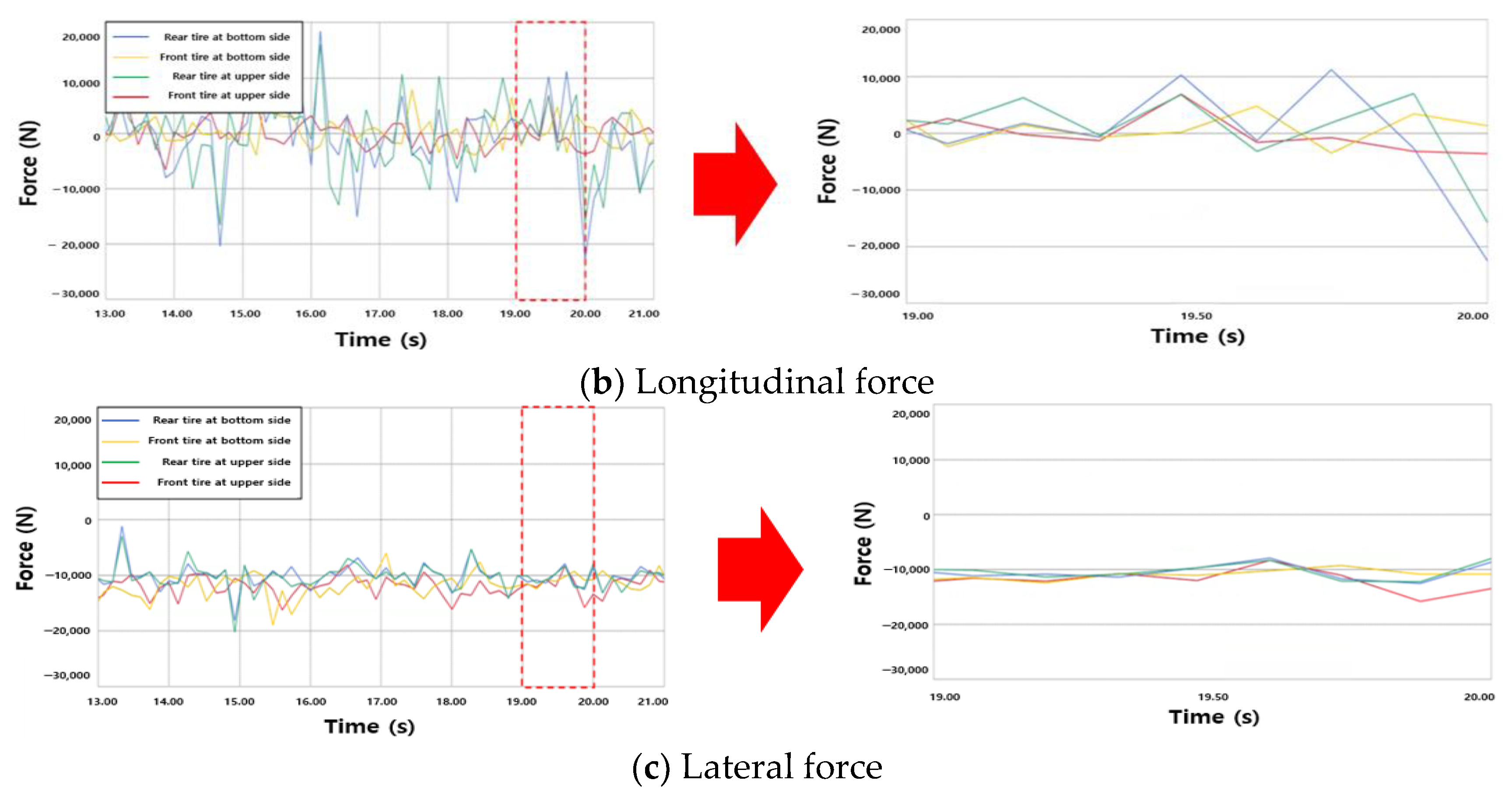
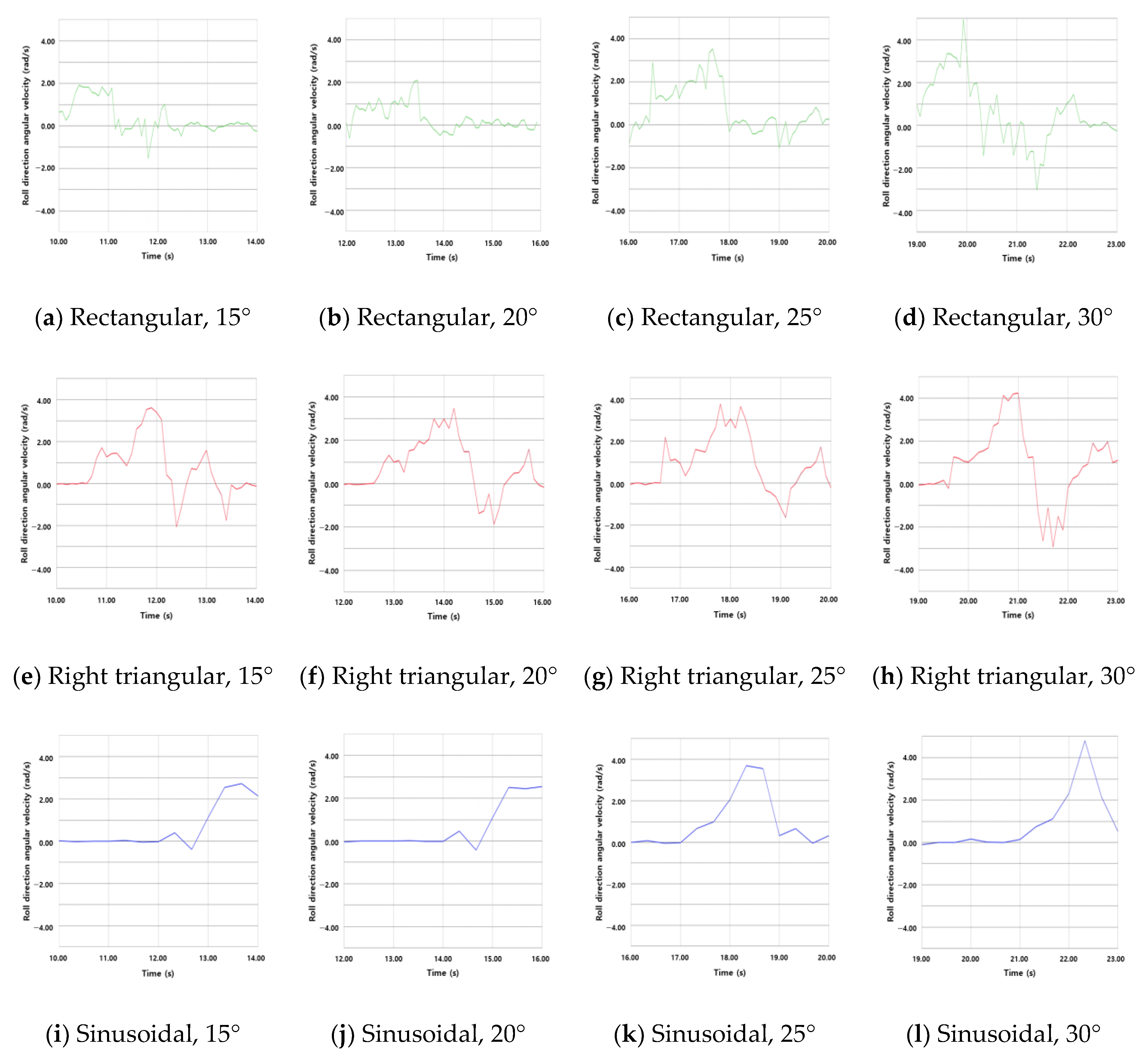
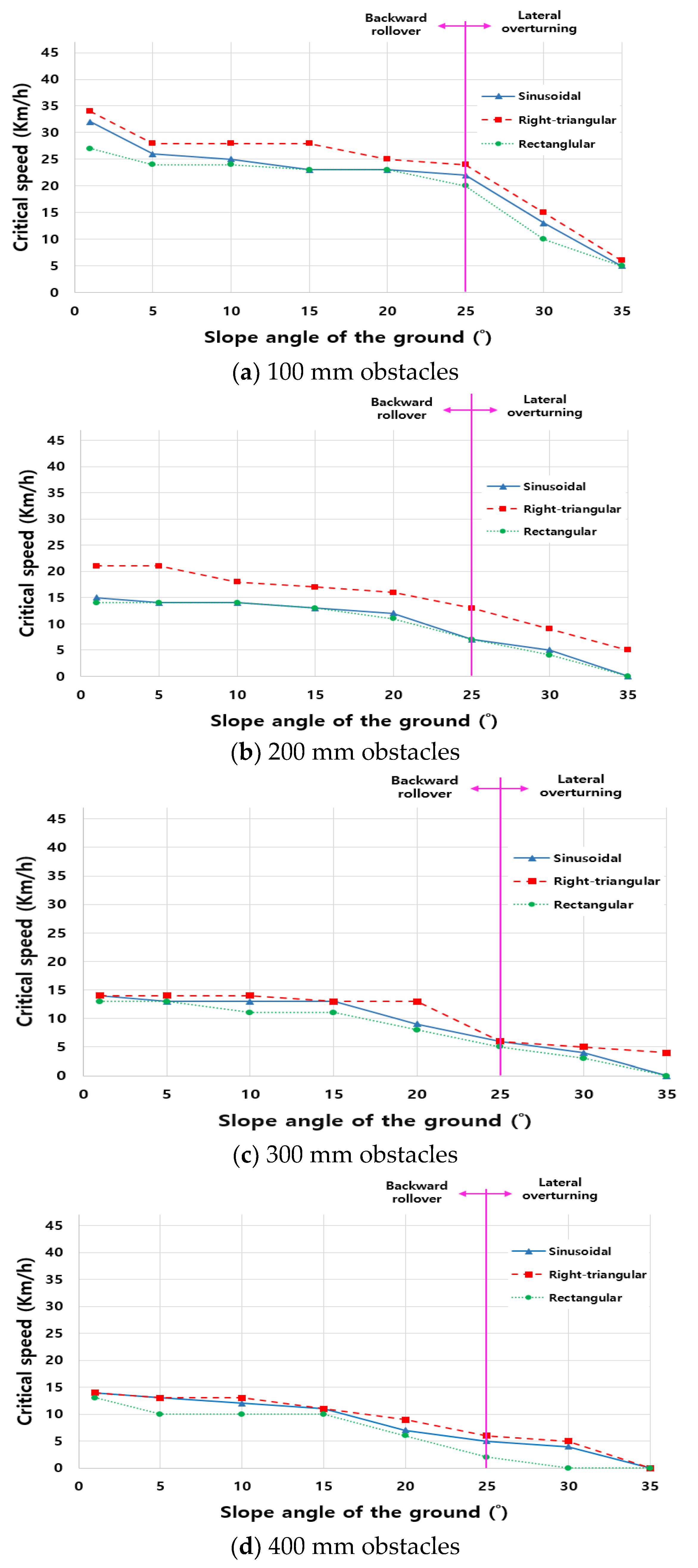
3.2. Types of Instability According to Slope of the Ground
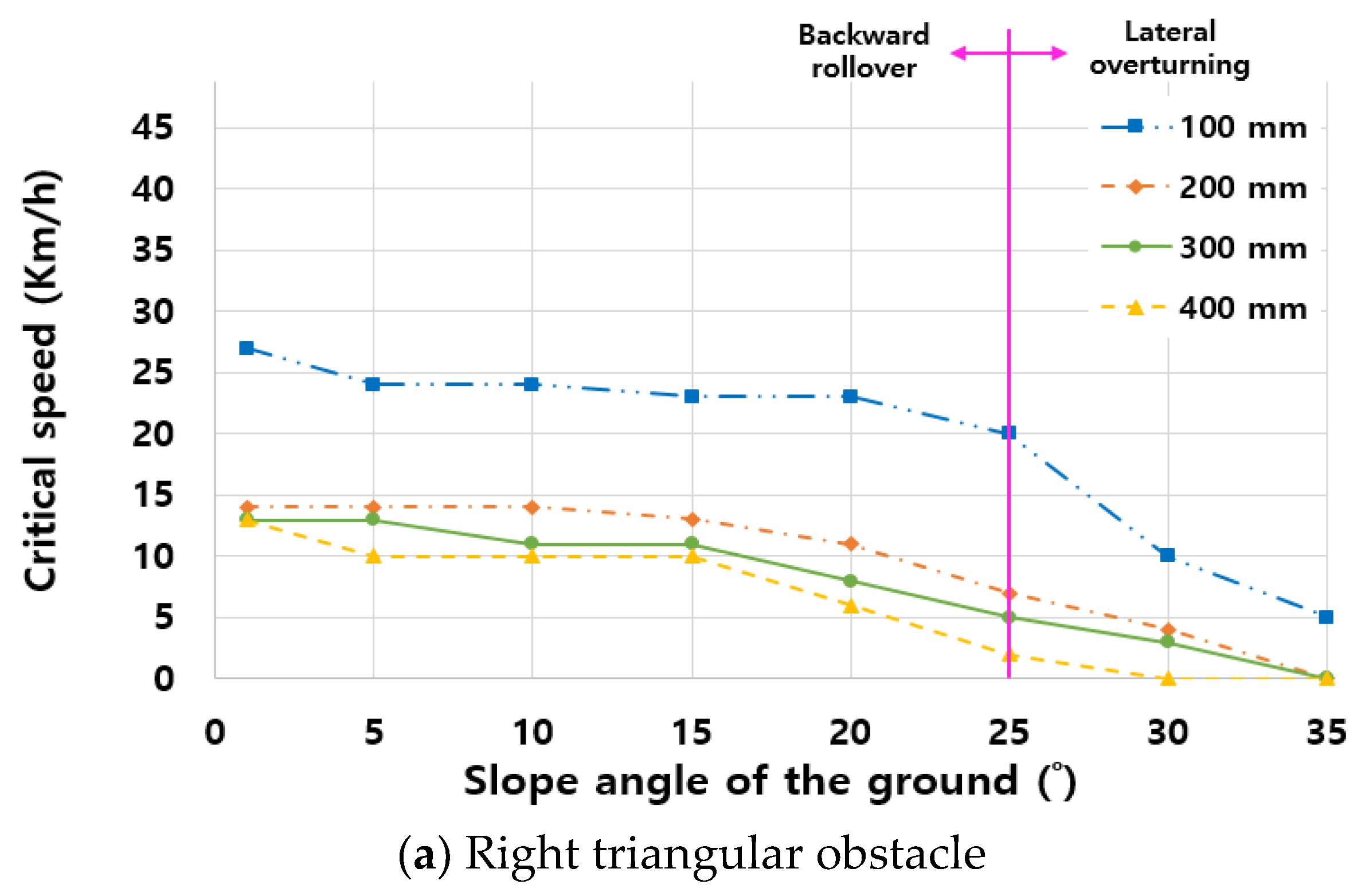
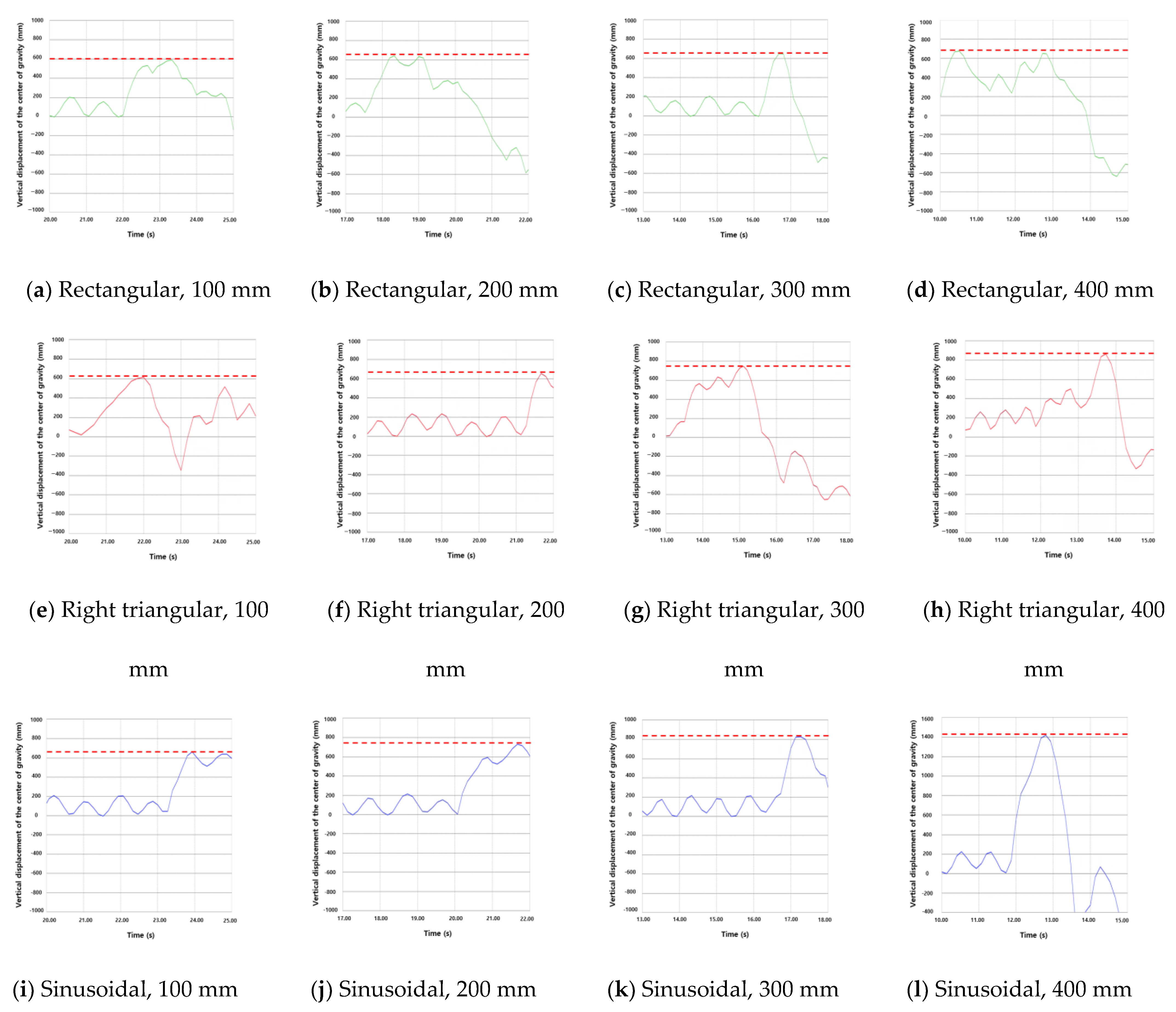
3.3. Ground Slope and Obstacle Height’s Effects
3.4. Effects of Obstacle Shape
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| θr | Lateral overturning angle when the rear wheel located above the slope is lifted from the ground |
References
- Kim, J.T.; Han, H.W.; Oh, J.S.; Chung, W.J.; Cho, S.J.; Park, Y.J. Structural Design of Garlic Plants Footplate Considering Physical Characteristics of Elderly Women. J. Biosyst. Eng. 2020, 45, 16–23. [Google Scholar] [CrossRef]
- Kim, B.G.; Lee, J.; Kim, S. Improvement of the Distribution System for Used Agricultural Machinery. J. Biosyst. Eng. 2020, 45, 318–324. [Google Scholar] [CrossRef]
- Koo, Y.M. PTO Torque and Draft Analyses of an Integrated Tractor-Mounted Implement for Round Ridge Preparation. J. Biosyst. Eng. 2022, 47, 330–343. [Google Scholar] [CrossRef]
- KAMICO. Agricultural Machinery Yearbook in Republic of Korea; Korean Society for Agricultural Machinery: Seoul, Republic of Korea, 2020. [Google Scholar]
- Kwak, H.Y.; Son, B.C. A Review of Studies on Injury and Safety of the Agricultural Machi. J. Rehabil. Welf. Eng. Assist. Technol. 2017, 11, 223–229. [Google Scholar]
- KOSIS. Results of Investigation for Farmer’s Accidents. Korean Statistical Information Service. 2022. Available online: https://kosis.kr/statisticsList/statisticsListIndex.do?vwcd=MT_ZTITLE&menuId=M_01_01 (accessed on 1 November 2021).
- Abubakar, M.S.A.; Ahmad, D.; Akande, F.B. A Review of Farm Tractor Overturning Accident and Safety. Pertanika J. Sci. Technol. 2010, 18, 377–385. [Google Scholar]
- Facchinetti, D.; Santoro, S.; Galli, L.E.; Pessina, D. Agricultural Tractor Roll-over Related Fatalities in Italy: Results from a 12 Years Analysis. Sustainability 2021, 13, 4536. [Google Scholar] [CrossRef]
- Bietresato, M.; Mazzetto, F. Increasing the Safety of Agricultural Machinery Operating on Sloping Grounds by Performing Static and Dynamic Tests of Stability on a New-Concept Facility. Int. J. Saf. Secur. Eng. 2018, 8, 77–89. [Google Scholar] [CrossRef]
- Ahmadi, I. Dynamics of tractor lateral overturn on slopes under the influence of position disturbances (model development). J. Terramechanics 2011, 48, 339–346. [Google Scholar] [CrossRef]
- Li, X.; Wang, G.; Yao, Z.; Qu, J. Dynamic Model and Validation of an Articulated Steering Wheel Loader on Slopes and over Obstacles. Veh. Syst. Dyn. 2013, 51, 1305–1323. [Google Scholar] [CrossRef]
- Ahmadi, I. Effect of Transition of Mounted Chisel Plow from Operation to Transport on Longitudinal Stability of Tractor (Part I-Modeling). Agric. Conspec. Sci. 2013, 78, 343–351. [Google Scholar]
- Previati, G.; Gobbi, M.; Mastinu, G. Mathematical models for farm tractor rollover prediction. Int. J. Veh. Des. 2014, 64, 280–303. [Google Scholar] [CrossRef]
- Li, Z.; Mitsuoka, M.; Inoue, E.; Okayasu, T.; Hirai, Y. Development of stability indicators for dynamic Phase I overturn of conventional farm tractors with front axle pivot. Biosyst. Eng. 2015, 134, 55–67. [Google Scholar] [CrossRef]
- Li, Z.; Mitsuoka, M.; Inoue, E.; Okayasu, T.; Hirai, Y.; Zhu, Z. Parameter Sensitivity for Tractor Lateral Stability against Phase I Overturn on Random Road Surfaces. Biosyst. Eng. 2016, 150, 10–23. [Google Scholar] [CrossRef]
- Choi, K.H.; Kim, S.M.; Hong, S. Analysis of Static Stability by Modified Mathematical Model for Asymmetric Tractor-Harvester System: Changes in Lateral Overturning Angle by Movement of Center of Gravity Coordinates. J. Biosyst. Eng. 2017, 42, 127–135. [Google Scholar] [CrossRef]
- Shim, S.B.; Nam, Y.J.; Koo, Y.M. Conceptual Design and Rearward Stability Analysis of an Integrated Tractor Implement for Flat Ridge Preparation. J. Agric. Life Sci. 2018, 52, 111–122. [Google Scholar] [CrossRef]
- Chowdhury, M.; Islam, M.N.; Iqbal, M.Z.; Islam, S.; Lee, D.H.; Kim, D.G.; Jun, H.J.; Chung, S.O. Analysis of Overturning and Vibration during Field Operation of a Tractor-Mounted 4-Row Radish Collector toward Ensuring User Safety. Machines 2020, 8, 77. [Google Scholar] [CrossRef]
- Lysych, M.N. A Study of the Static Lateral Stability of a Tillage Machine-Tractor Unit on a Virtual Stand. J. Phys. Conf. Ser. 2020, 1515, 042033. [Google Scholar] [CrossRef]
- Qiao, W.; Wei, Q. Study on Active Anti Rollover Control and Model Test of Tractor Momentum Flywheel. INMATEH-Agric. Eng. 2021, 65, 225–232. [Google Scholar] [CrossRef]
- Kang, S.; Kim, Y.; Park, H.; Kim, Y.; Woo, S.; Uyeh, D.D.; Ha, Y. Rollover Safety and Workable Boundary Suggestion of an Agricultural Platform with Different Attachments. Agriculture 2022, 12, 1148. [Google Scholar] [CrossRef]
- Jang, M.K.; Hwang, S.J.; Kim, J.H.; Nam, J.S. Overturning and Rollover Characteristics of a Tractor through Dynamic Simulations: Effect of Slope Angle and Obstacles on a Hard Surface. Biosyst. Eng. 2022, 219, 11–24. [Google Scholar] [CrossRef]
- Hwang, S.J.; Jang, M.K.; Nam, J.S. Application of Lateral Overturning and Backward Rollover Analysis in a Multi-Purpose Agricultural Machine Developed in South Korea. Agronomy 2021, 11, 297. [Google Scholar] [CrossRef]
- Jang, S.W.; Lim, M.S. Robust design technology for plastic parts reliability. In Kijeon Research Center, Korea; 2006; pp. 344–352. [Google Scholar]
- Badaruddin, M.; Sugiyanto; Wardono, H.; Andoko; Wang, C.J.; Rivai, A.K. Improvement of Low-Cycle Fatigue Resistance in AISI 4140 Steel by Annealing Treatment. Int. J. Fatigue 2019, 125, 406–417. [Google Scholar] [CrossRef]
- Hofstee, J.W.; Huisman, W. Handling and Spreading of Fertilizers Part 1: Physical Properties of Fertilizer in Relation to Particle Motion. J. Agric. Eng. Res. 1990, 47, 213–234. [Google Scholar] [CrossRef]
- Olieslagers, R.; Ramon, H.; De Baerdemaeker, J. Calculation of Fertilizer Distribution Patterns from a Spinning Disc Spreader by Means of a Simulation Model. J. Agric. Eng. Res. 1996, 63, 137–152. [Google Scholar] [CrossRef]
- Baek, J.H.; Choi, B.K. A Study on Indications in Radiographic Tests in Welding Specimens According to Shielded Amounts of ATOS 80 High-Strength Steel. J. Korean Soc. Manuf. Technol. Eng. 2012, 21, 910–914. [Google Scholar] [CrossRef] [Green Version]
- Babafemi, A.J.; Šavija, B.; Paul, S.C.; Anggraini, V. Engineering Properties of Concrete with Waste Recycled Plastic: A Review. Sustainability 2018, 10, 3875. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.H.; Chen, C.L.; Tu, S.H.; Jeng, W.S.; Shen, J.F.; Tyan, F. Modelling and Simulation of Half Car Suspension System with a MR Damper Using RecurDyn and Simulink. J. Adv. Eng. 2010, 1, 27–32. [Google Scholar]
- Choi, J.; Choi, J.H. Analysis Method for Multi-Flexible-Body Dynamics Solver in RecurDyn. Trans. KSME C Technol. Educ. 2015, 3, 107–115. [Google Scholar] [CrossRef]
- Guzzomi, A.L. A Revised Kineto-Static Model for Phase I Tractor Rollover. Biosyst. Eng. 2012, 113, 65–75. [Google Scholar] [CrossRef]
- Lee, K.S.; Jo, W.R. The Gradient Analysis of the Korean Peninsula by Using DEM. J. Korean Assoc. Geogr. Inf. Stud. 2000, 3, 35–43. [Google Scholar]
- Jang, S.; Kim, J.; Choi, H.; Oh, S.; Lim, H.; Kim, T.H. Convenience Harvest Product of Chilli and Bare Ground Vegetable. KSAM 2016, 64. [Google Scholar]
- Jang, S.W.; Park, S.H.; Choi, S.K.; Kang, T.G.; Lee, S.H. The Survey of Cultivation Pattern Radish and Kimchi Cabbage Vegetable in Chief Production District in Korea. Korean Soc. Hortic. Sci. 2018, 60. [Google Scholar]
- Lee, C.S. Mechanization for coherent production of garlic. Korean Soc. Bio-Environ. Control. 2002, 15, 43–49. [Google Scholar]
- Chang, S.; Kim, H.; Yi, E.; Rho, Y. Incidence of Phyt ophthora Rot Caused by Phytophthora Capsici Leon. in Squash Field and Cultivar Resistance. Korean J. Hortic. Sci. Technol. 2008, 26, 484–489. [Google Scholar]
- Ryu, K.H.; Kim, K.U.; Kim, S.T.; Park, K.J.; Park, S.J.; Park, J.G.; Seo, S.Y.; Shin, B.S.; Yeon, K.S.; Lee, G.S. Tractor Engineering Principle, 1st ed.; Moon Woon Dang: Seoul, Republic of Korea, 2004; pp. 395–410. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Specifications | |
|---|---|---|
| Name/Company/Nation | RT135/DaeHo/Republic of Korea | |
| Weight (kg) | 4790 | |
| Length × Width × Height (mm) | 7000 × 2345 × 2810 | |
| Engine-rated power (kW)/speed (rpm) | 95.6/2250 | |
| Driving speed | Minimum (km h−1) | 1.86 |
| Maximum (km h−1) | 48.81 | |
| Item | Specification |
|---|---|
| Company/Nation | DaeHo/Republic of Korea |
| Weight (kg) | 1030 |
| Length × Width × Height (mm) | 3300 × 2200 × 1350 |
| Applied power (kW) | 73.5–110.3 |
| Maximum working width (mm) | 2700–3200 |
| Items | Value | |
|---|---|---|
| Alloy steel (Body frame, engine frame, rotary blade, etc.) | Poisson’s ratio | 0.3 |
| Shear modulus (GPa) | 209.88 | |
| Density (kg m−3) | 1900 | |
| Stainless steel (Wheel-rim, exterior frame, etc.) | Poisson’s ratio | 0.3 |
| Shear modulus (GPa) | 79.3 | |
| Density (kg m−3) | 7930 | |
| Synthetic rubber (tire) | Poisson’s ratio | 0.46 |
| Shear modulus (GPa) | 0.4 | |
| Density (kg m−3) | 950 | |
| ATOS-80 (Implement frame) | Yield strength (MPa) | 830 |
| Tensile strength (MPa) | 770 | |
| Elongation (%) | 15 | |
| PE plastic (Seeding box) | Elastic modulus (GPa) | 1.0 |
| Tensile strength (MPa) | 20 | |
| Classifications | Minimum Turning Radius (mm) | Static Sidelong Falling Angle (°) |
|---|---|---|
| Dynamic simulation | 3020 | 47.2 |
| Accredited certification test | 3060 | 45.3 |
| Error (%) | 1.31 | 4.19 |
| Items | Value | |
|---|---|---|
| Interaction between wheel and ground | Stiffness (N mm−1) | 4080 |
| Damping coefficient | 2.8 | |
| Static friction Coefficient | 1.55 | |
| Dynamic friction Coefficient | 1.2 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jang, M.-K.; Hwang, S.-J.; Nam, J.-S. Simulation Study for Overturning and Rollover Characteristics of a Tractor with an Implement on a Hard Surface. Agronomy 2022, 12, 3093. https://doi.org/10.3390/agronomy12123093
Jang M-K, Hwang S-J, Nam J-S. Simulation Study for Overturning and Rollover Characteristics of a Tractor with an Implement on a Hard Surface. Agronomy. 2022; 12(12):3093. https://doi.org/10.3390/agronomy12123093
Chicago/Turabian StyleJang, Moon-Kyeong, Seok-Joon Hwang, and Ju-Seok Nam. 2022. "Simulation Study for Overturning and Rollover Characteristics of a Tractor with an Implement on a Hard Surface" Agronomy 12, no. 12: 3093. https://doi.org/10.3390/agronomy12123093
APA StyleJang, M.-K., Hwang, S.-J., & Nam, J.-S. (2022). Simulation Study for Overturning and Rollover Characteristics of a Tractor with an Implement on a Hard Surface. Agronomy, 12(12), 3093. https://doi.org/10.3390/agronomy12123093