Thrust Force Ripple Reduction of Two C-Core Linear Flux-Switching Permanent Magnet Machines of High Thrust Force Capability

Abstract
1. Introduction
2. Machine Topology and Thrust Force Comparison
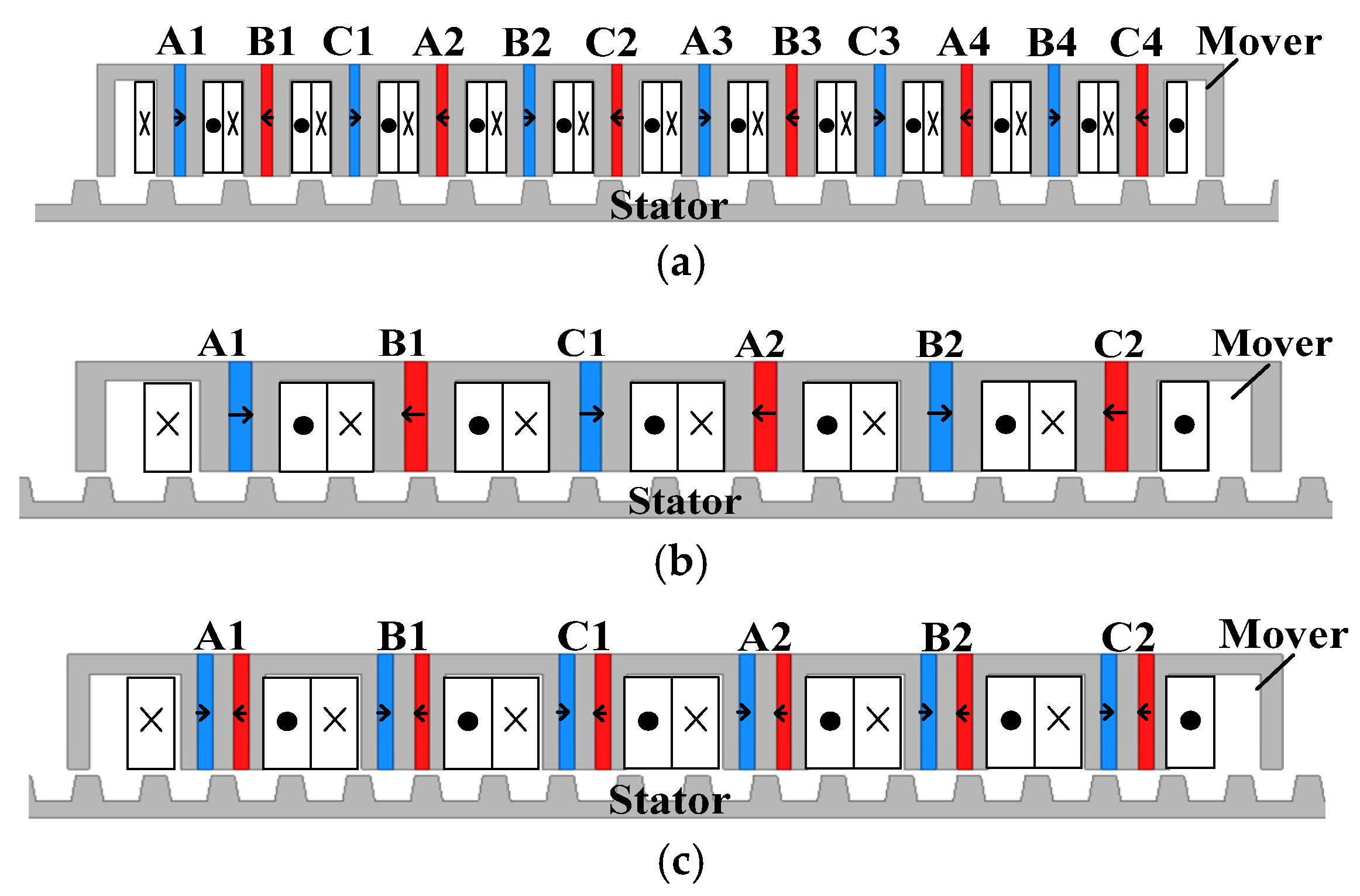
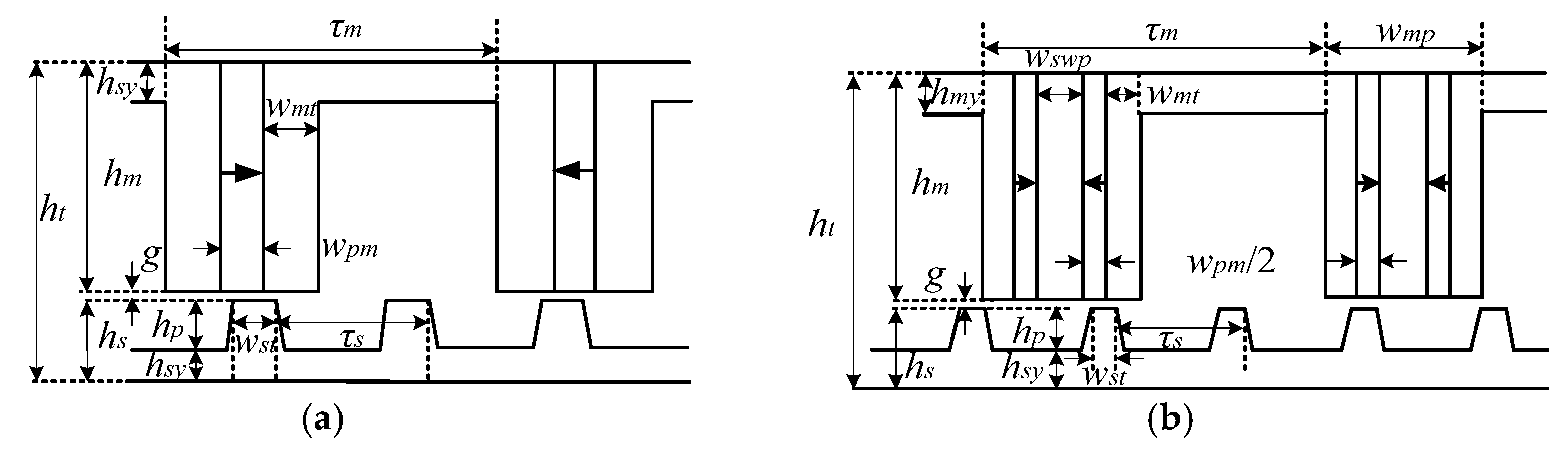
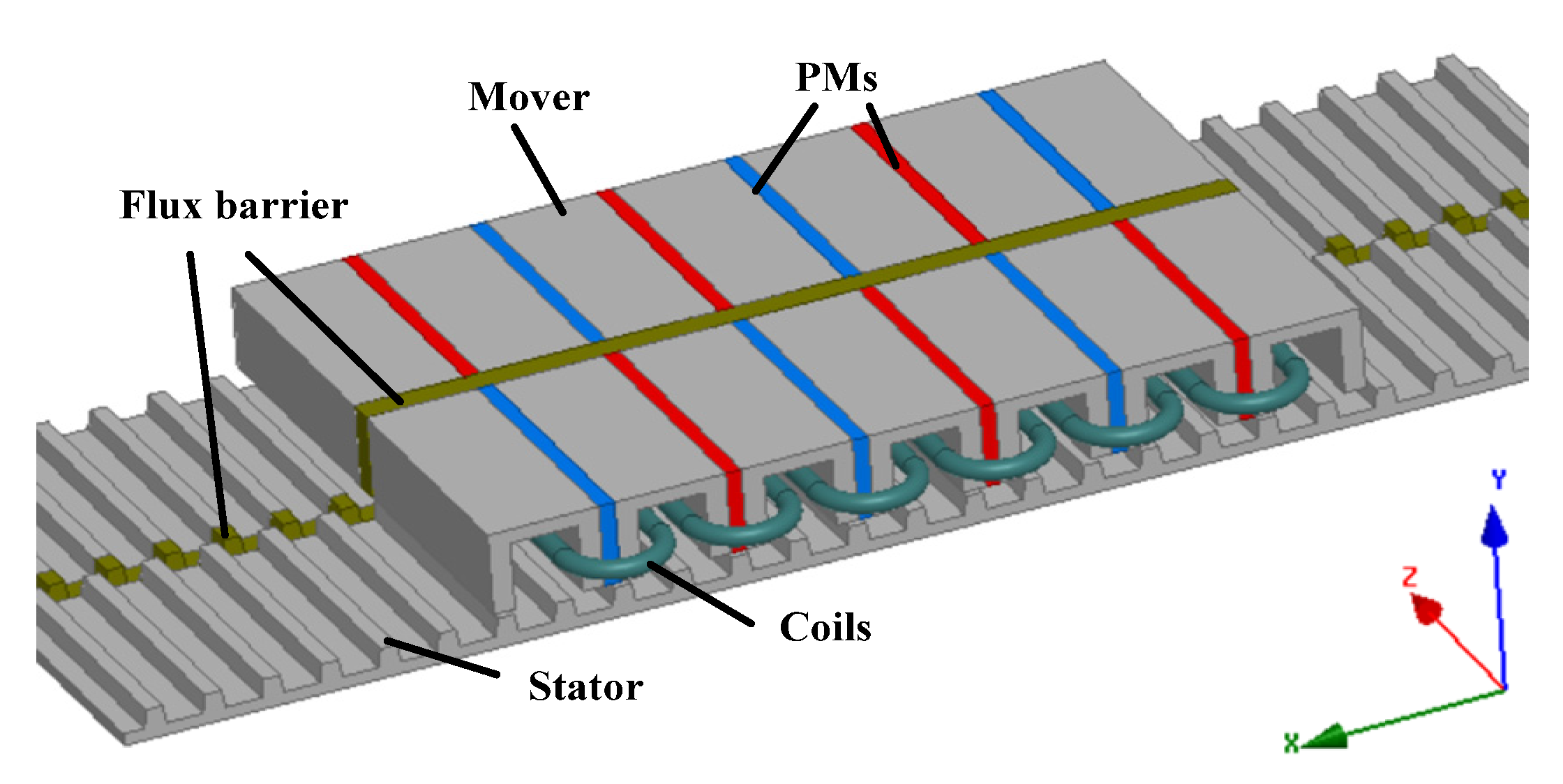
2.1. Machine Topology
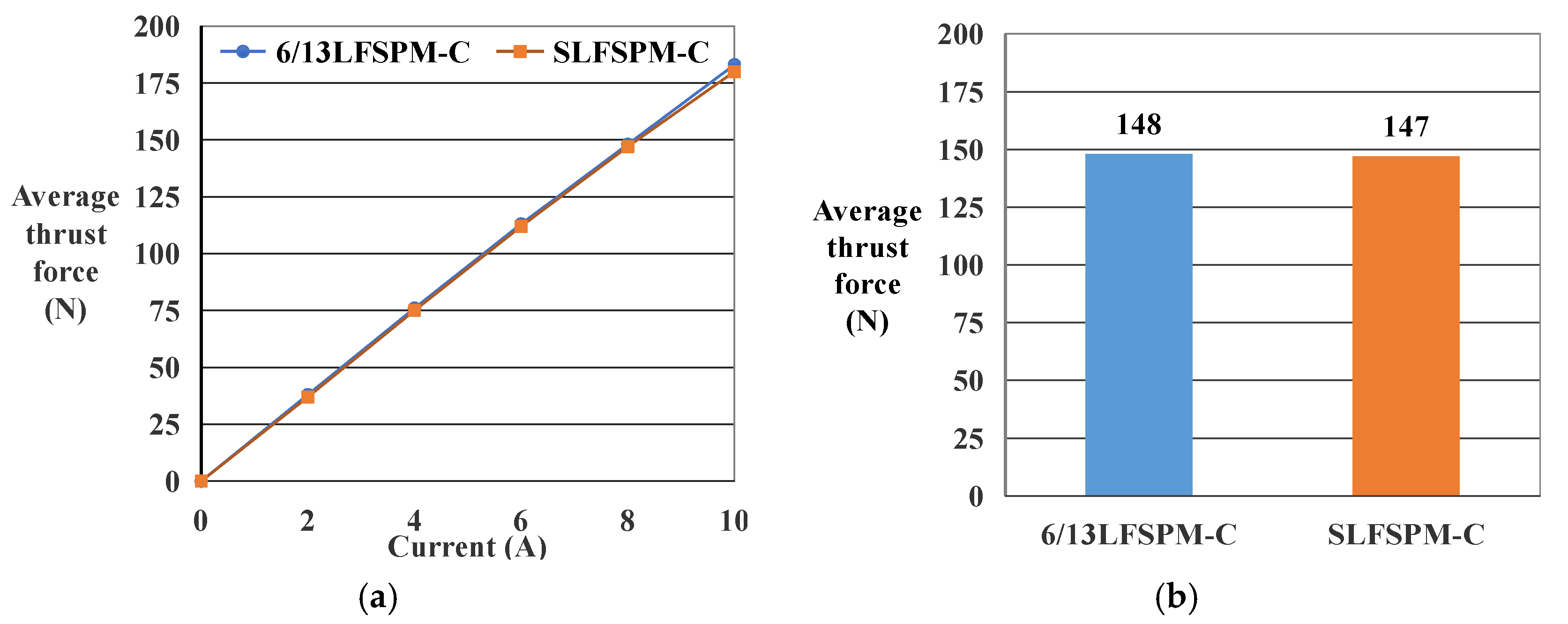
2.2. Thrust Force Comparison
3. Thrust Force Ripple Reduction
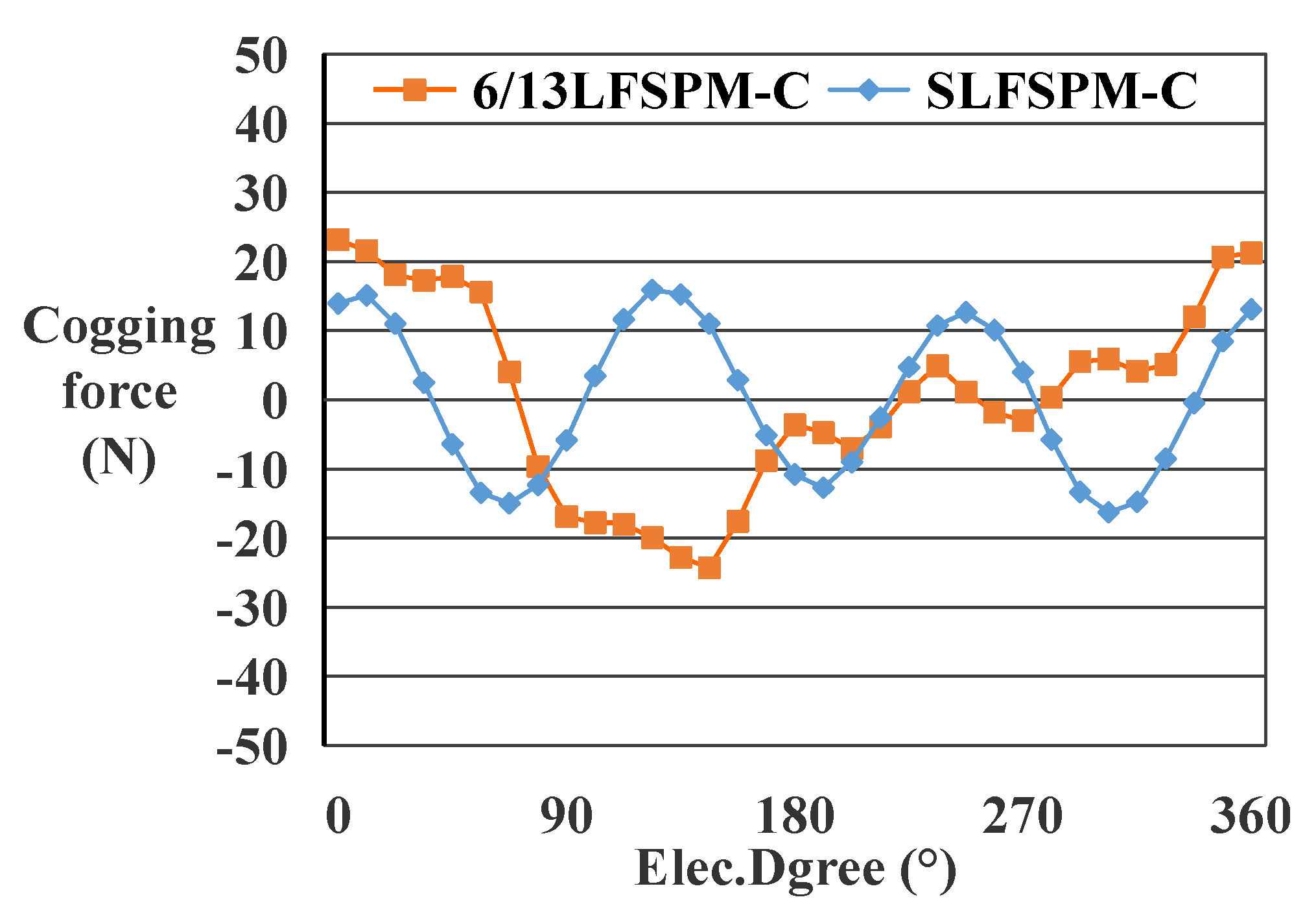
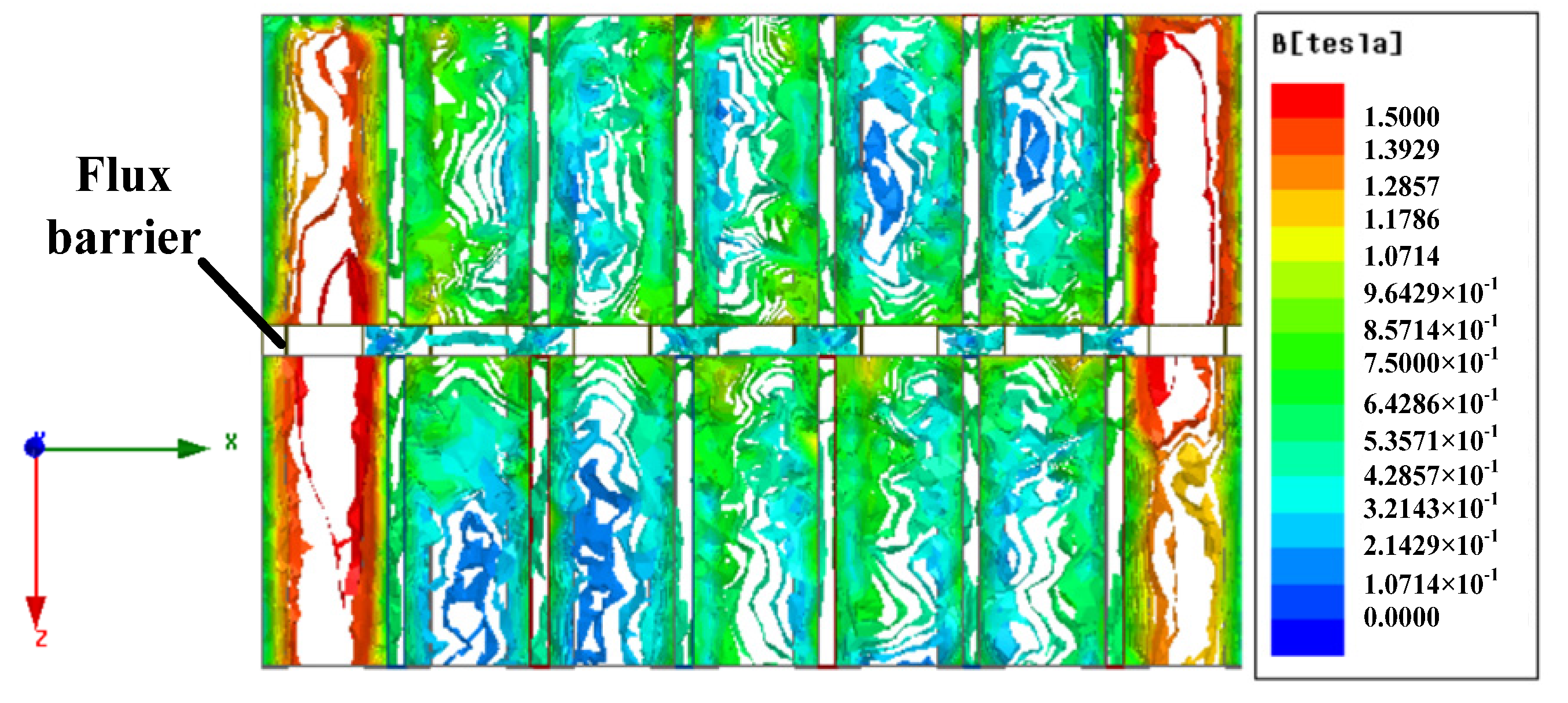
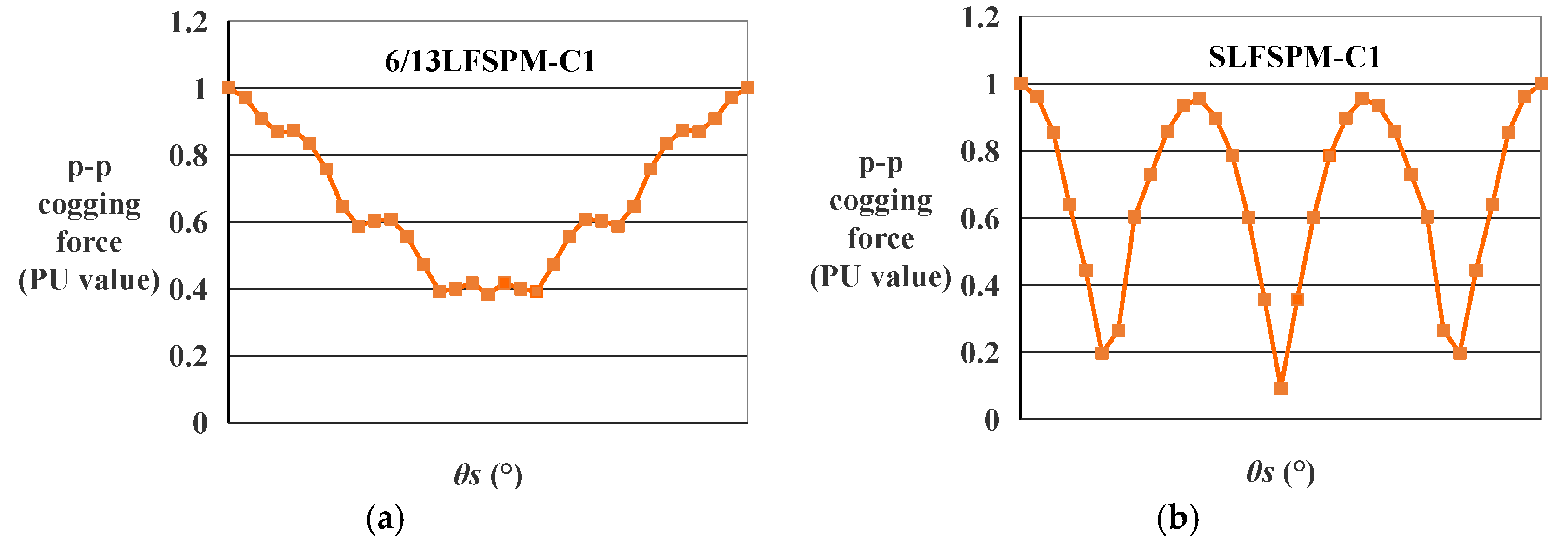
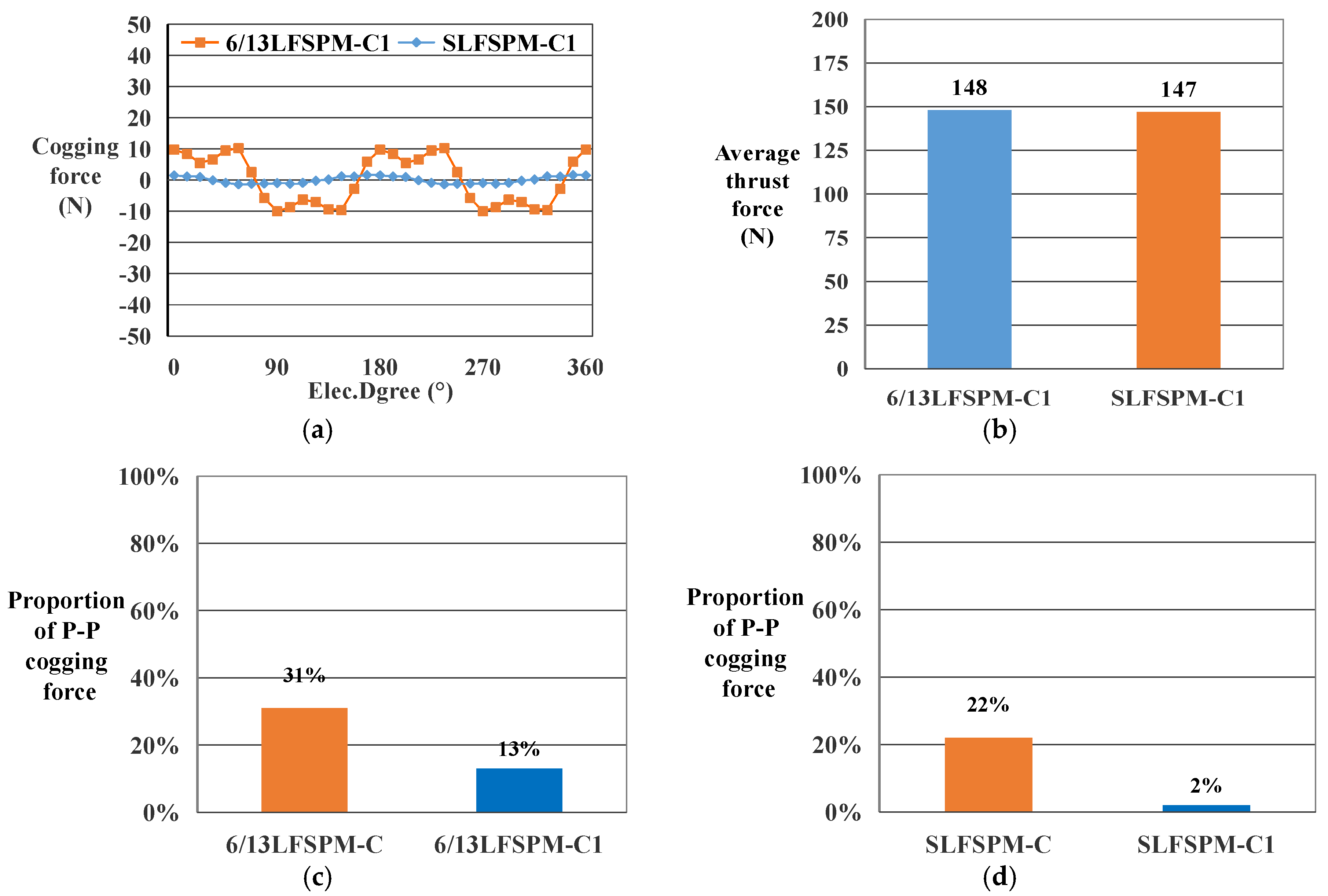
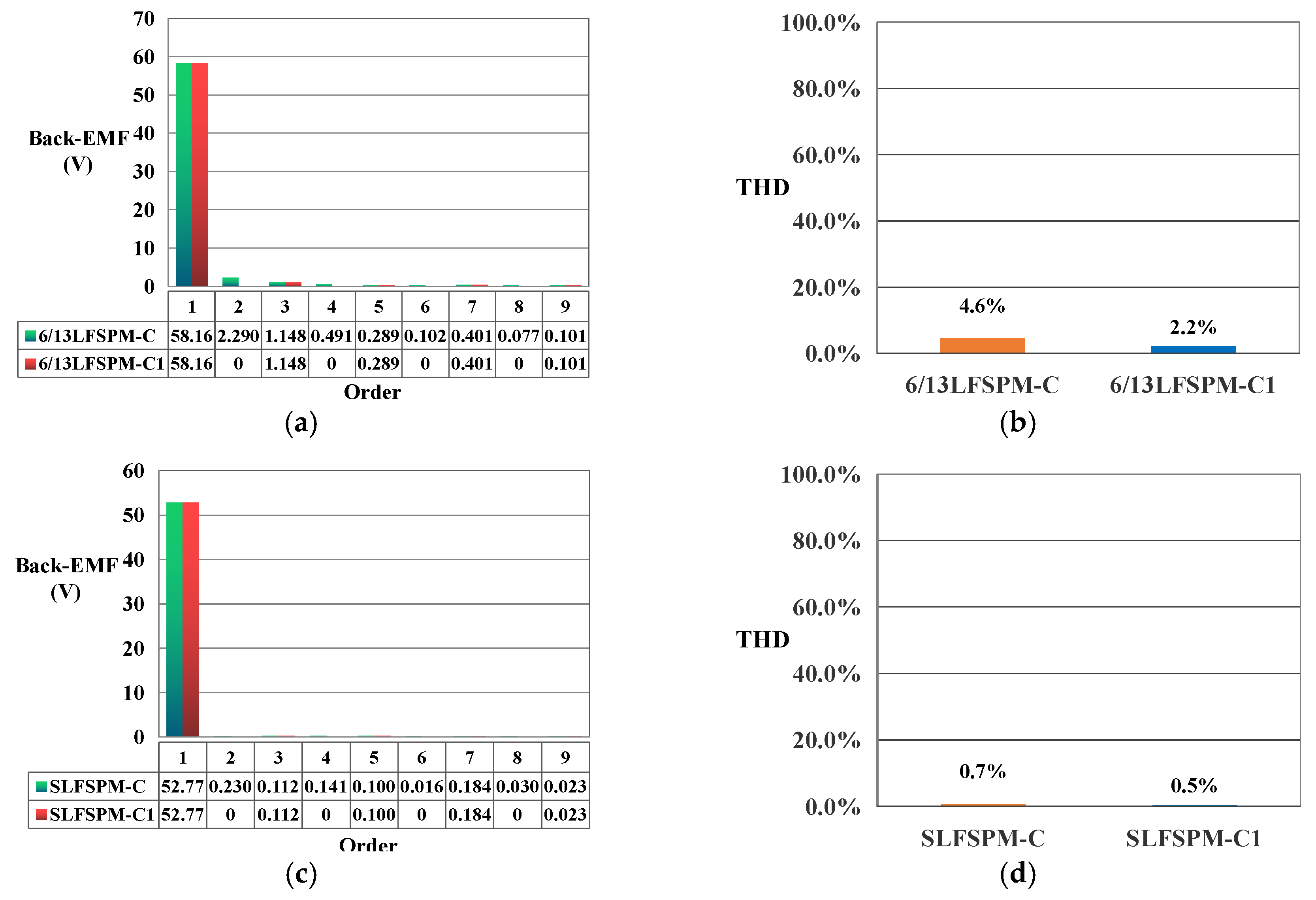
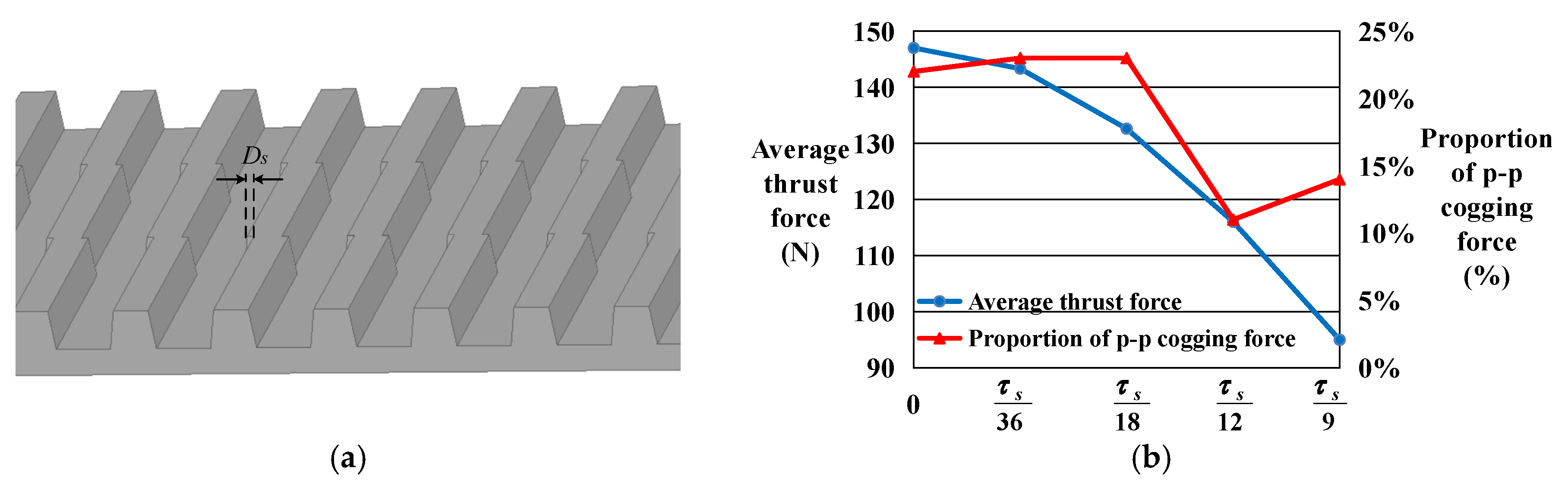
3.1. Step 1, Reduction of the Cogging Force and Suppression of the Harmonics in No-Load Back-EMFs
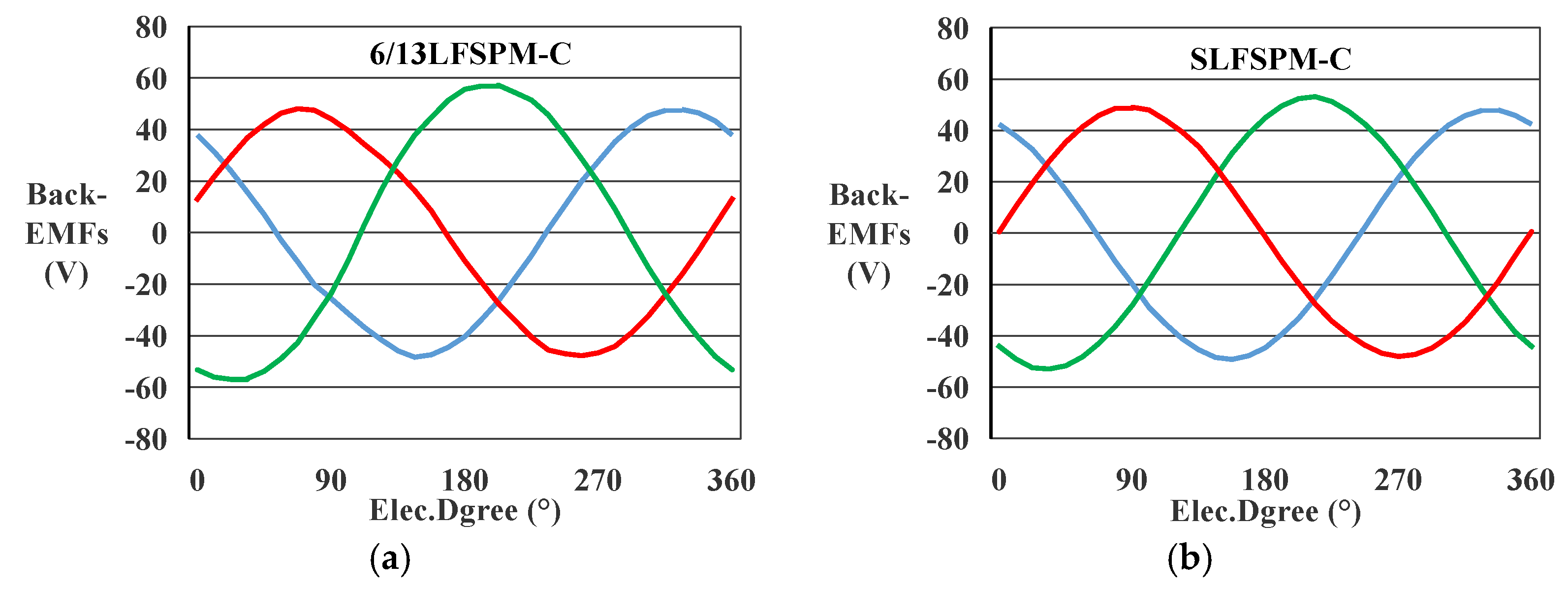
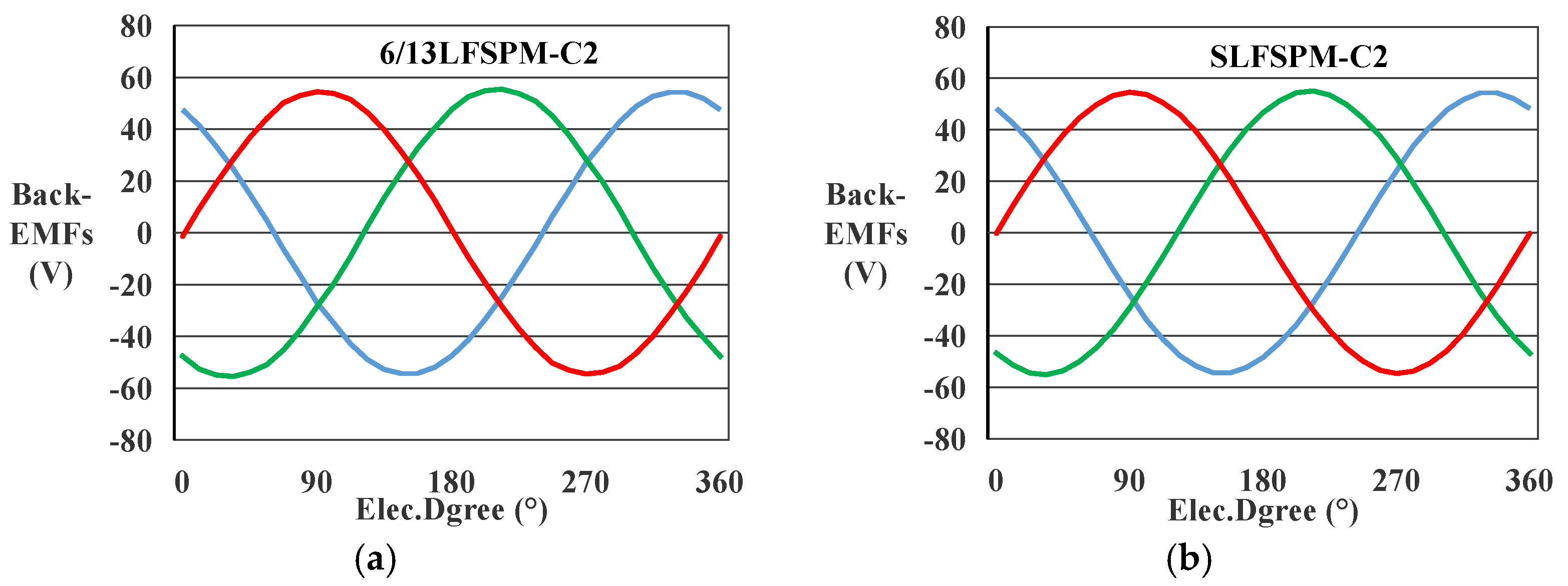
3.2. Step II: The Balance of the Three Phase No-Load Back-EMFs
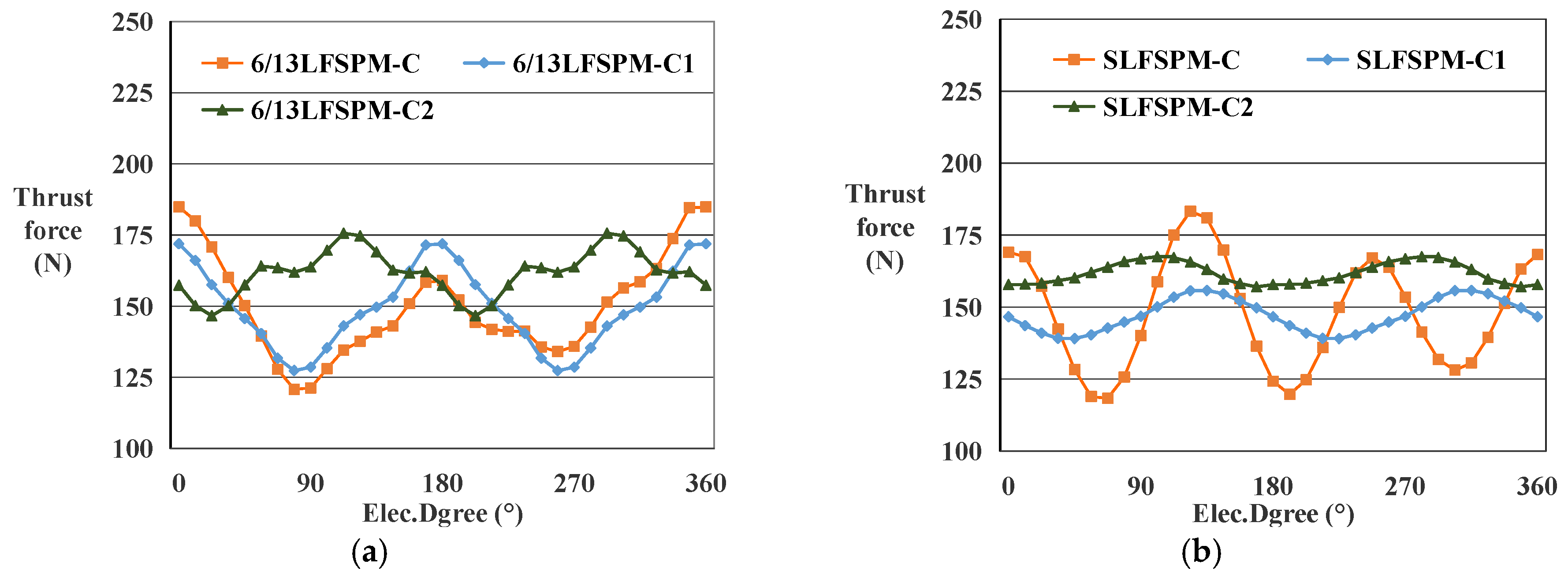
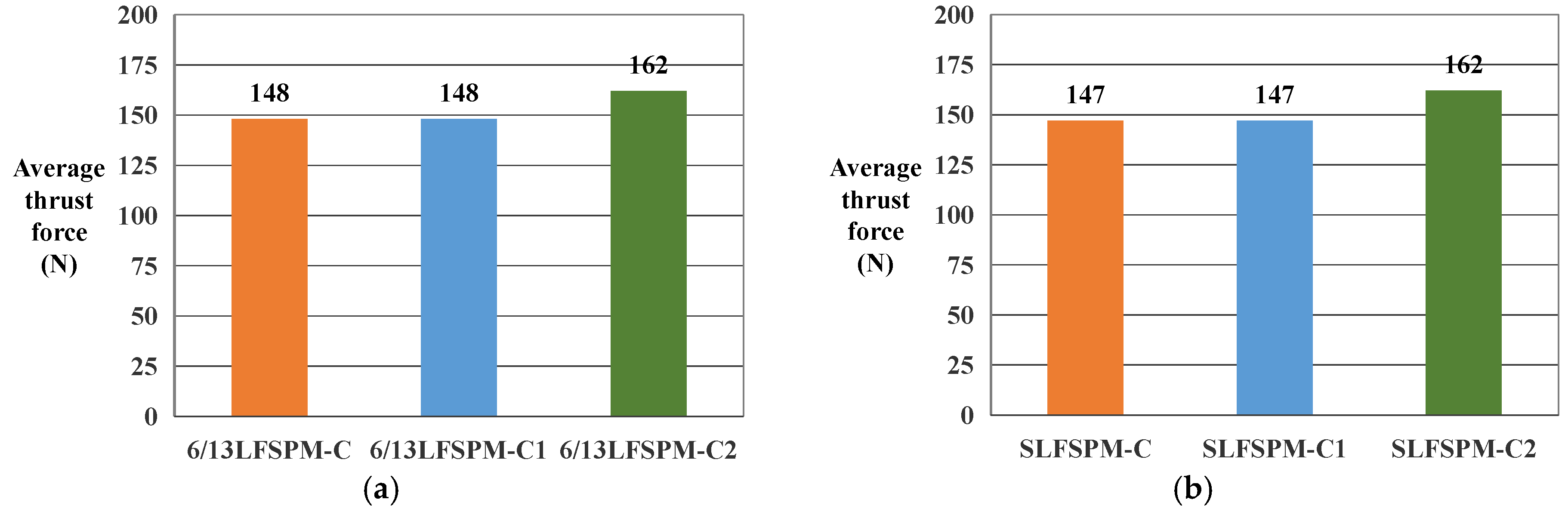
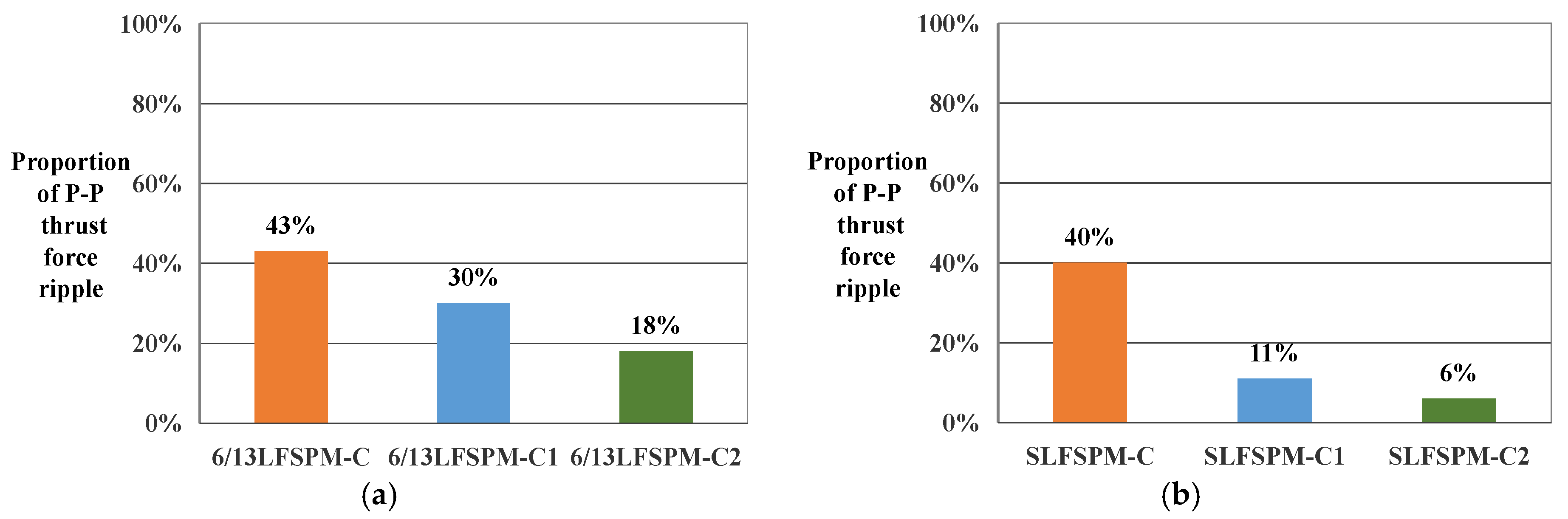
3.3. The Results of the Thrust Force Ripple Reduction
4. Conclusions
- (1)
- Based on the staggered stator tooth and the design of the displacement of the two stator parts, these C-core machines can reduce cogging force to a minimum and achieve high sinusoidal back-EMFs without a decrease in thrust force capability.
- (2)
- Based on the assistant of end PMs, for the two C-core machines, the magnitude of three phase no-load back-EMFs can be balanced, and in turn, the thrust force capability can be further enhanced, in addition to the reduction of thrust ripples brought by unbalanced back-EMFs.
- (3)
- The 6/13LFSPM-C2 machine and the SLFSPM-C2 machine have the same thrust force capability, however, the SLFSPM-C2 machine exhibits a very low thrust force ripple, which is far smaller than that of the 6/13LFSPM-C2 machine.
- (4)
- The proposed thrust force ripple reduction method, based on two steps, is general, practical, and can be employed for conventional LFSPM machines to suppress thrust ripples.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Du, Y.; Jin, N. Research on characteristics of single-sided linear induction motors for urban transit. In Proceedings of the 2009 IEEE International Conference on Electrical Machines and Systems (ICEMS), Tokyo, Japan, 15–18 November 2009; pp. 1–4. [Google Scholar]
- Stumberger, G.; Zarko, D.; Aydemir, M.T.; Lipo, T.A. Design and comparison of linear synchronous motor and linear induction motor for electromagnetic aircraft launch system. In Proceedings of the 2003 IEEE Electrical Machines and Systems Electric Machines and Drives Conference (IEMDC), Madison, WI, USA, 1–4 June 2003; pp. 494–500. [Google Scholar]
- Kim, Y.K.; Gu, B.G.; Jung, I.S.; Won, S.H.; Hur, J. Analysis and Design of Slotted Tubular Linear Actuator for the Eco-pedal System of a Vehicle. IEEE Trans. Magn. 2012, 48, 939–942. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Chen, X.; Chen, J.T.; Howe, D.; Dai, J.S. Novel linear flux-switching permanent magnet machines. In Proceedings of the 2008 IEEE International Conference on Electrical Machines and Systems (ICEMS), Wuhan, China, 17–20 October 2008; pp. 2948–2953. [Google Scholar]
- Gandhi, A.; Parsa, L. Thrust Optimization of a Flux-Switching Linear Synchronous Machine with Yokeless Translator. IEEE Trans. Magn. 2013, 49, 1436–1443. [Google Scholar] [CrossRef]
- Min, W.; Chen, J.T.; Zhu, Z.Q.; Zhu, Y.; Duan, G.H. Optimization of linear flux switching permanent magnet motor. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference (VPPC), Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar]
- Zhou, S.G.; Yu, H.T.; Hu, M.Q.; Jiang, C.X.; Hao, L. Reduction of Cogging Force in a Linear Flux-Switching Permanent-Magnet Brushless AC Machine for Direct-Drive Applications. IEEE Trans. Magn. 2011, 47, 3252–3255. [Google Scholar] [CrossRef]
- Wang, C.F.; Shen, J.X.; Wang, Y. A New Method for Reduction of Detent Force in Permanent Magnet Flux-Switching Linear Motors. IEEE Trans. Magn. 2009, 45, 2843–2846. [Google Scholar] [CrossRef]
- Du, Y.; Yang, G.; Quan, L.; Zhu, X.Y.; Xiao, F.; Wu, H.Y. Detent Force Reduction of a C-core Linear Flux-Switching Permanent Magnet Machine with Multiple Additional Teeth. Energies 2017, 10, 318. [Google Scholar] [CrossRef]
- Fei, W.; Luk, P.C.K.; Shen, J. Torque Analysis of Permanent Magnet Flux Switching Machines with Rotor Step Skewing. IEEE Trans. Magn. 2012, 48, 2664–2673. [Google Scholar] [CrossRef]
- Min, W.; Chen, J.T.; Zhu, Z.Q.; Zhu, Y.; Zhang, M. Optimization and Comparison of Novel E-core and C-core Linear Switched Flux PM Machines. IEEE Trans. Magn. 2011, 47, 2134–2141. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Zhou, Y.J. Torque Density and Magnet Usage Efficiency Enhancement of Sandwiched Switched Flux Permanent Magnet Machines Using V-Shaped Magnets. IEEE Trans. Magn. 2013, 49, 3834–3837. [Google Scholar] [CrossRef]
- Cao, R.W.; Cheng, M.; Hua, W.; Wang, X.; Zhao, W.X. Modeling of a Complementary and Modular Linear Flux-Switching Permanent Magnet Motor for Urban Rail Transit. IEEE Trans. Energy Convers. 2012, 27, 489–497. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item and Symbol | 6/13LFSPM-C | SLFSPM-C |
|---|---|---|
| Air gap length, g(mm) | 1 | |
| Total height, ht (mm) | 25 | |
| Machine depth, D (mm) | 100 | |
| Mover pole pith, tm(mm) | 24 | |
| Stator pole height, hp (mm) | 3.9 | |
| Stator pole width, wst (mm) | 3.1 | |
| Mover pole height, hm (mm) | 17.5 | |
| Mover yoke thickness, hmy (mm) | 3 | |
| Stator pole pith, ts (mm) | 11.08 | 9 |
| PM thickness, wpm (mm) | 3 | 4 |
| Mover tooth width, wmt (mm) | 4.1 | 2.18 |
| Mover sandwiched pole thickness, wswp (mm) | - | 2.84 |
| Magnet remanence, Br (T) | 1.2 | |
| Magnet relative permeability, μr | 1.034 | |
| Number of phases | 3 | |
| Armature windings per phase | 100 turns | |
| Rated input current amplitude, (A) | 8 | |
| Rated velocity, v (m/s) | 4 | |
| Optimization Variables and Definition | Initial Value and Ranges | Results |
|---|---|---|
| Split ratio, As (hs/ht) | 0.26 [0.2–0.3] | 0.28 |
| Stator pole width ratio, wst-ratio (wst/τs) | 0.34 [0.2–0.4] | 0.32 |
| Stator pole height ratio, hp-ratio (hp/hs) | 0.6 [0.5–0.7] | 0.62 |
| Mover yoke thickness ratio, hmy-ratio (hmy/hm) | 0.15 [0.1–0.2] | 0.15 |
| Mover sandwiched pole ratio, wswp-ratio (wswp/wmt) | 1.3 [1–2] | 1.3 |
| Mover pole ratio, wmp-ratio (wmp/τs) | 1.24 [1.2–1.3] | 1.27 |
| PM thickness, wpm | 4 mm [3 mm–5 mm] | 4 mm |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, W.; Wang, Y. Thrust Force Ripple Reduction of Two C-Core Linear Flux-Switching Permanent Magnet Machines of High Thrust Force Capability. Energies 2017, 10, 1608. https://doi.org/10.3390/en10101608
Hao W, Wang Y. Thrust Force Ripple Reduction of Two C-Core Linear Flux-Switching Permanent Magnet Machines of High Thrust Force Capability. Energies. 2017; 10(10):1608. https://doi.org/10.3390/en10101608
Chicago/Turabian StyleHao, Wenjuan, and Yu Wang. 2017. "Thrust Force Ripple Reduction of Two C-Core Linear Flux-Switching Permanent Magnet Machines of High Thrust Force Capability" Energies 10, no. 10: 1608. https://doi.org/10.3390/en10101608
APA StyleHao, W., & Wang, Y. (2017). Thrust Force Ripple Reduction of Two C-Core Linear Flux-Switching Permanent Magnet Machines of High Thrust Force Capability. Energies, 10(10), 1608. https://doi.org/10.3390/en10101608