Dynamic Equivalent Modeling of a Grid-Tied Microgrid Based on Characteristic Model and Measurement Data

 ,
,
Abstract
:1. Introduction
2. Distributed Generation and Microgrid Model
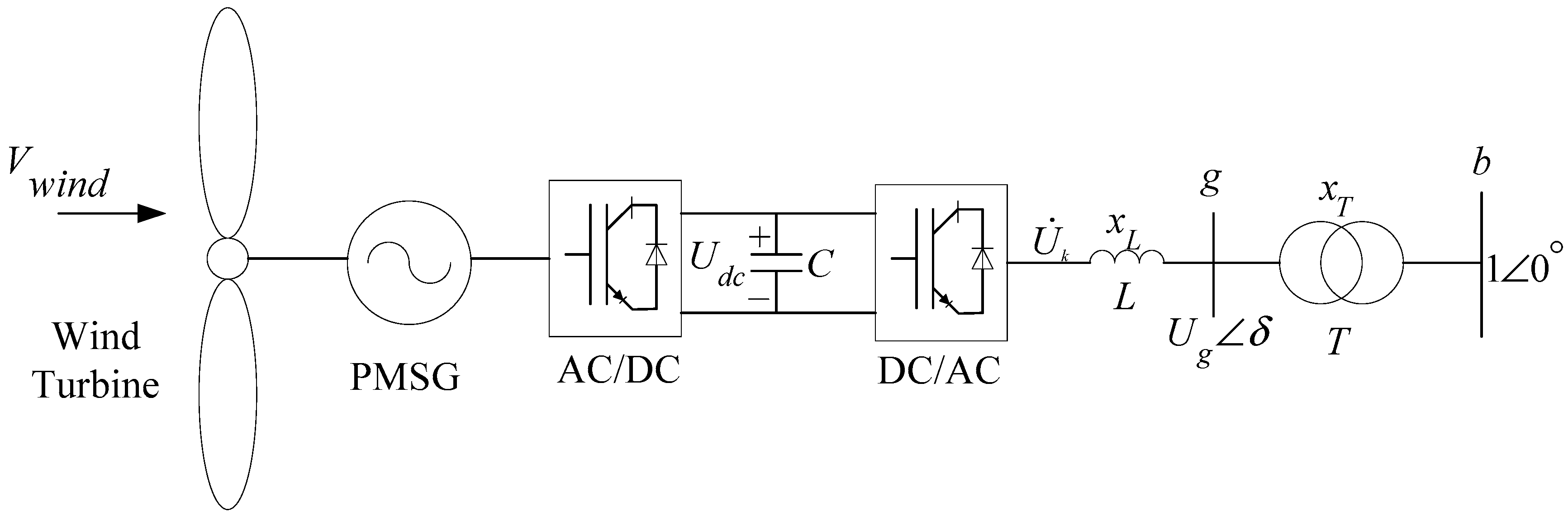
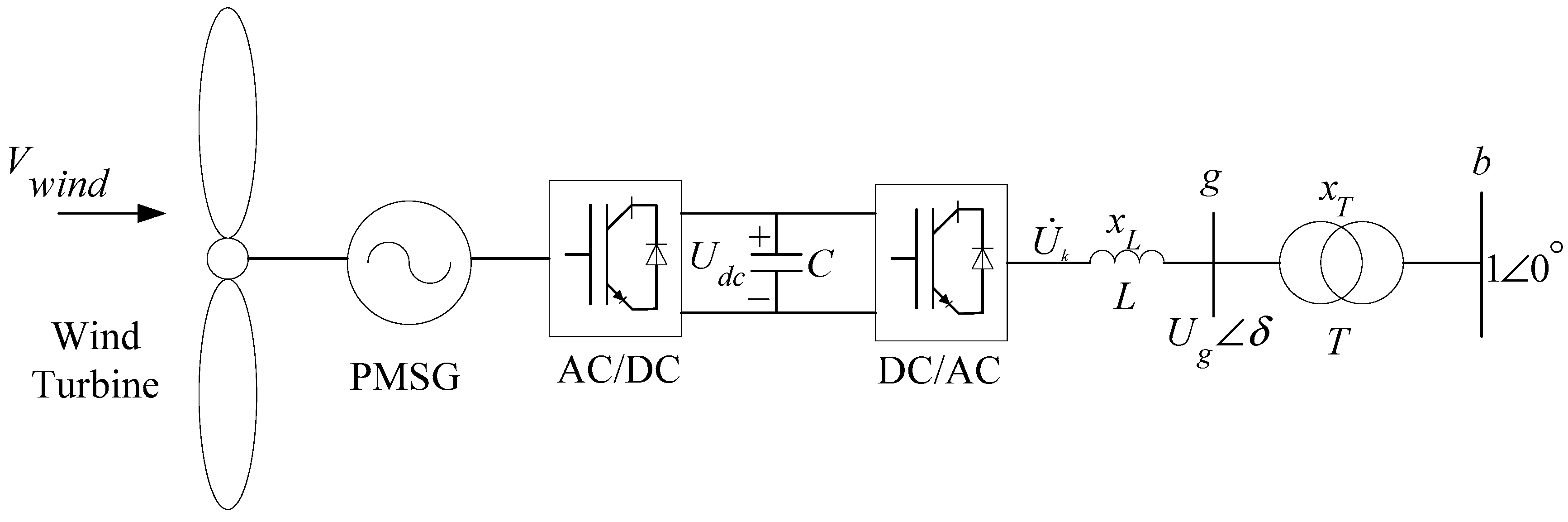
2.1. Wind Power Model
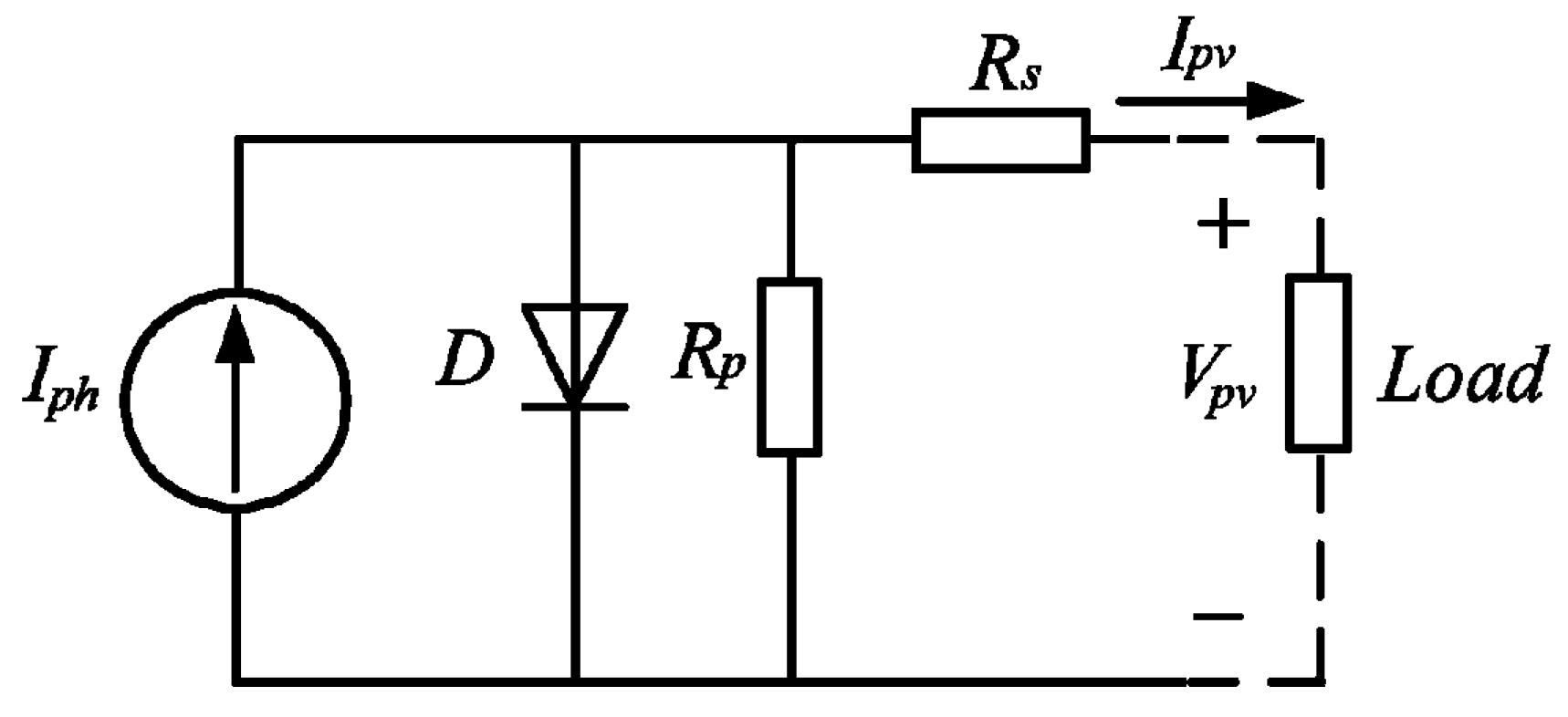
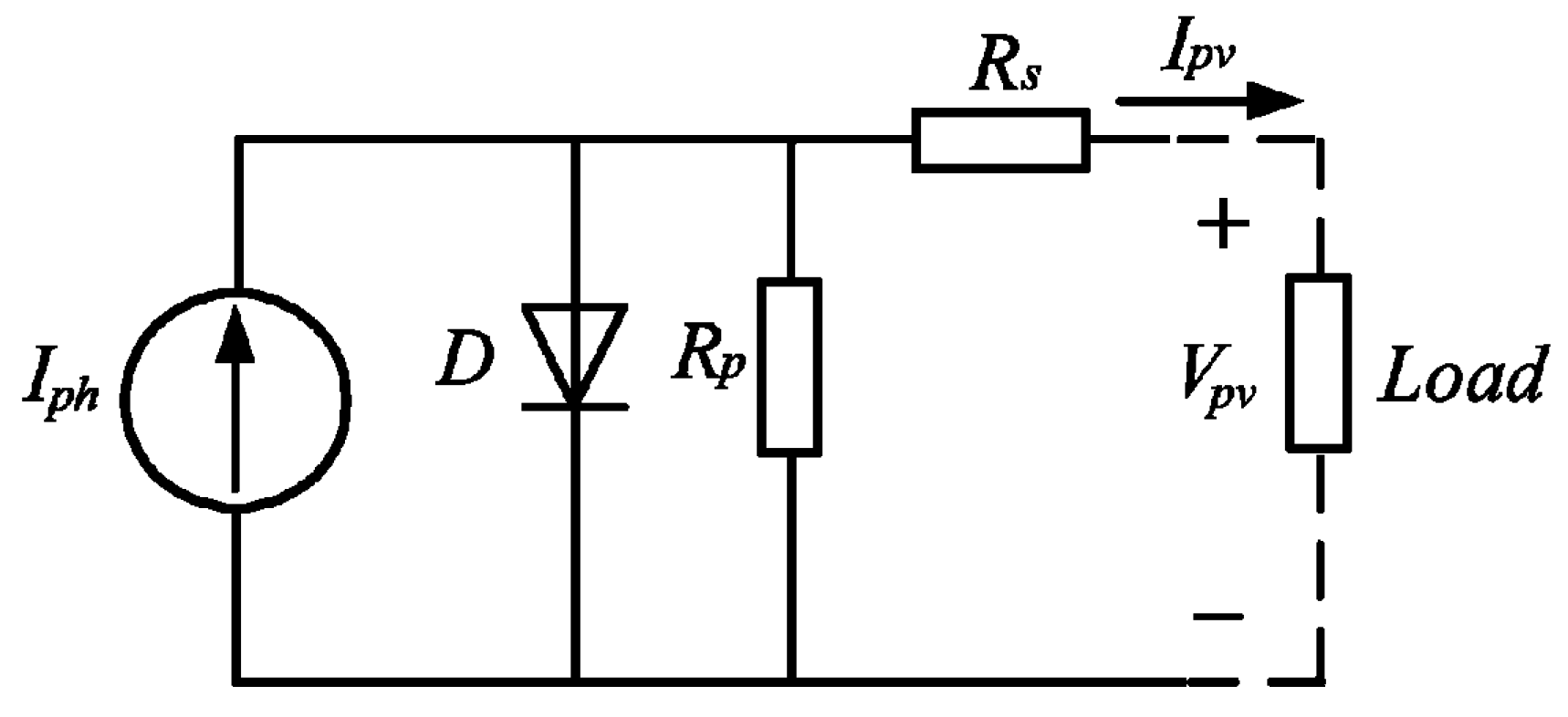
2.2. Photovoltaic System
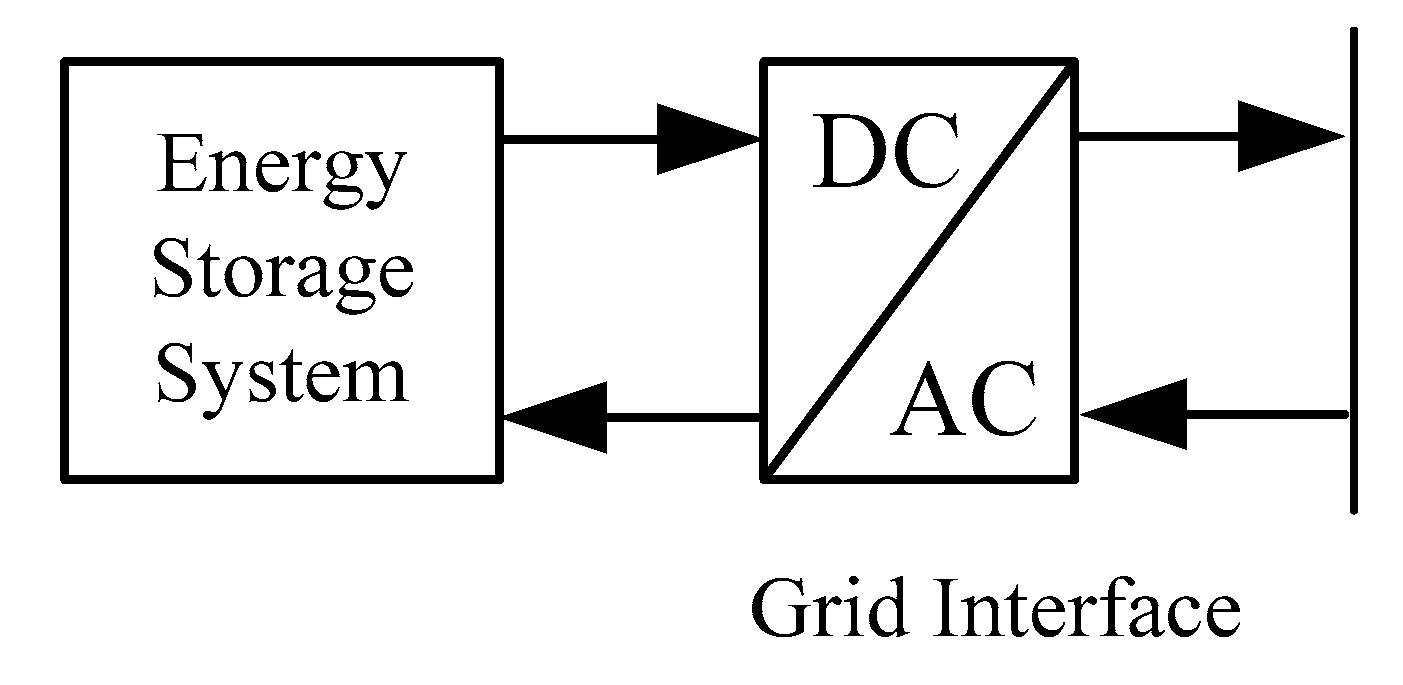
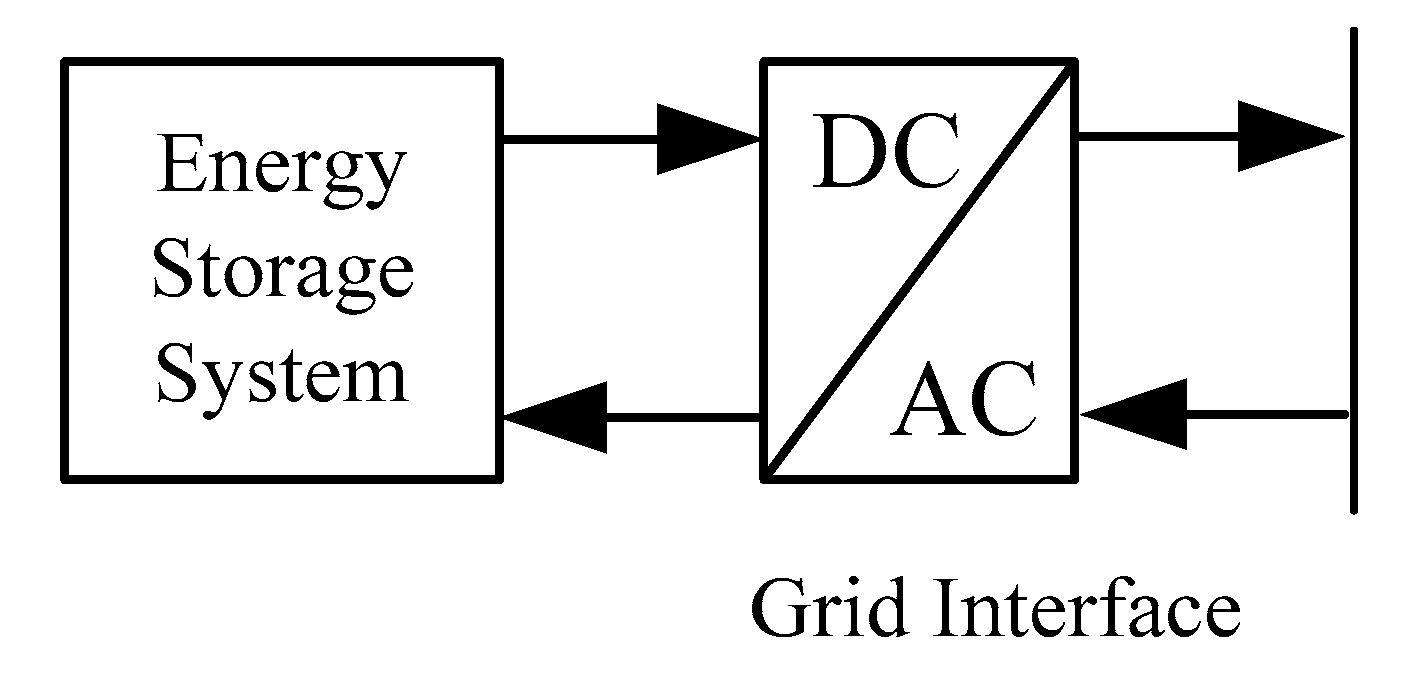
2.3. Energy Storage System
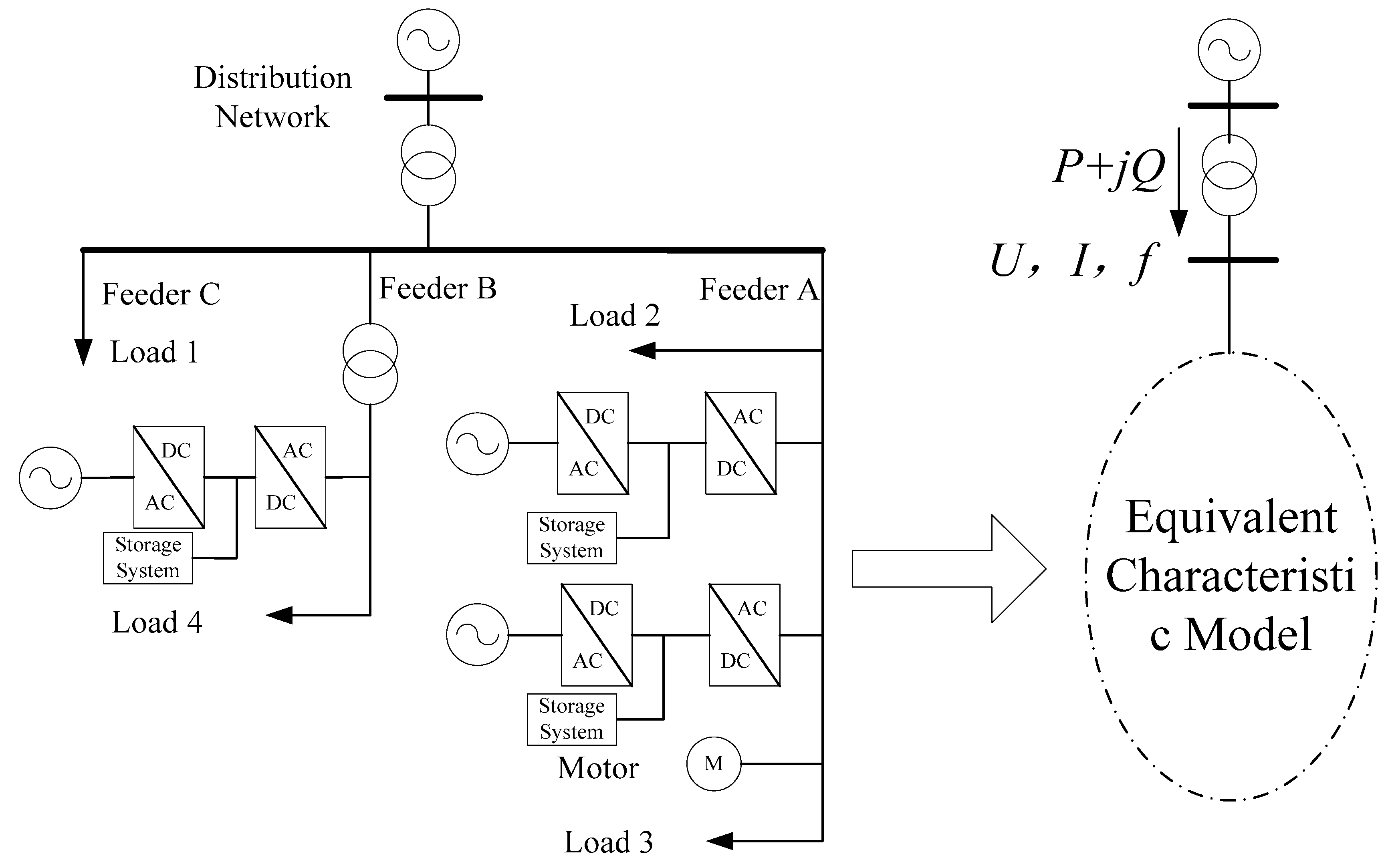
2.4. Microgrid System Detailed Model
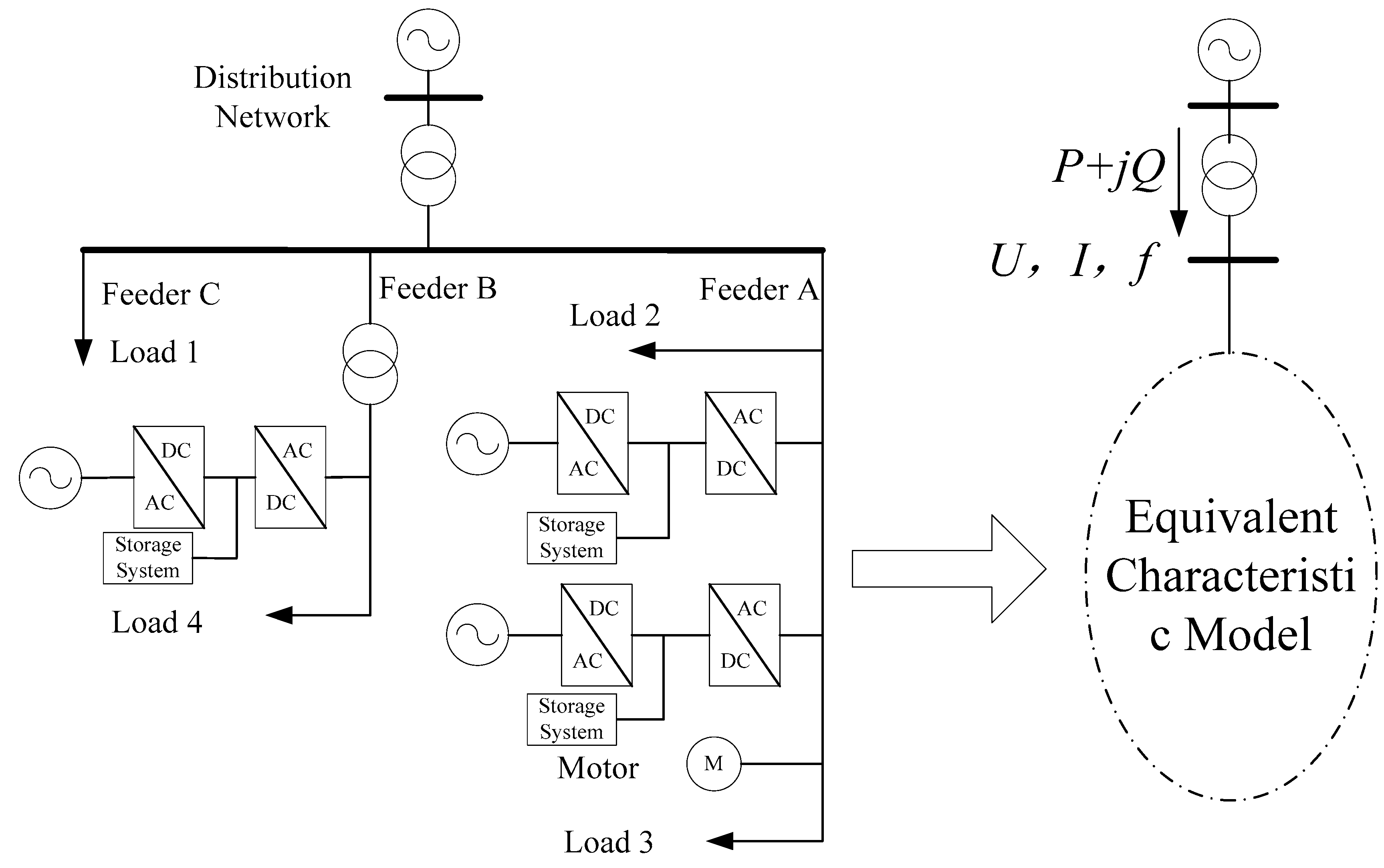
3. Microgrid Equivalent Modeling
3.1. Characteristic Model
- (1)
- The system is controllable.
- (2)
- The controllable variables are single order
- (3)
- If the state variables and input data equal zero: xi = ui = 0, then the function equals zero: f(k) = 0.
- (4)
- f(k) is a continuous derivative, and the partial derivatives are bounded.
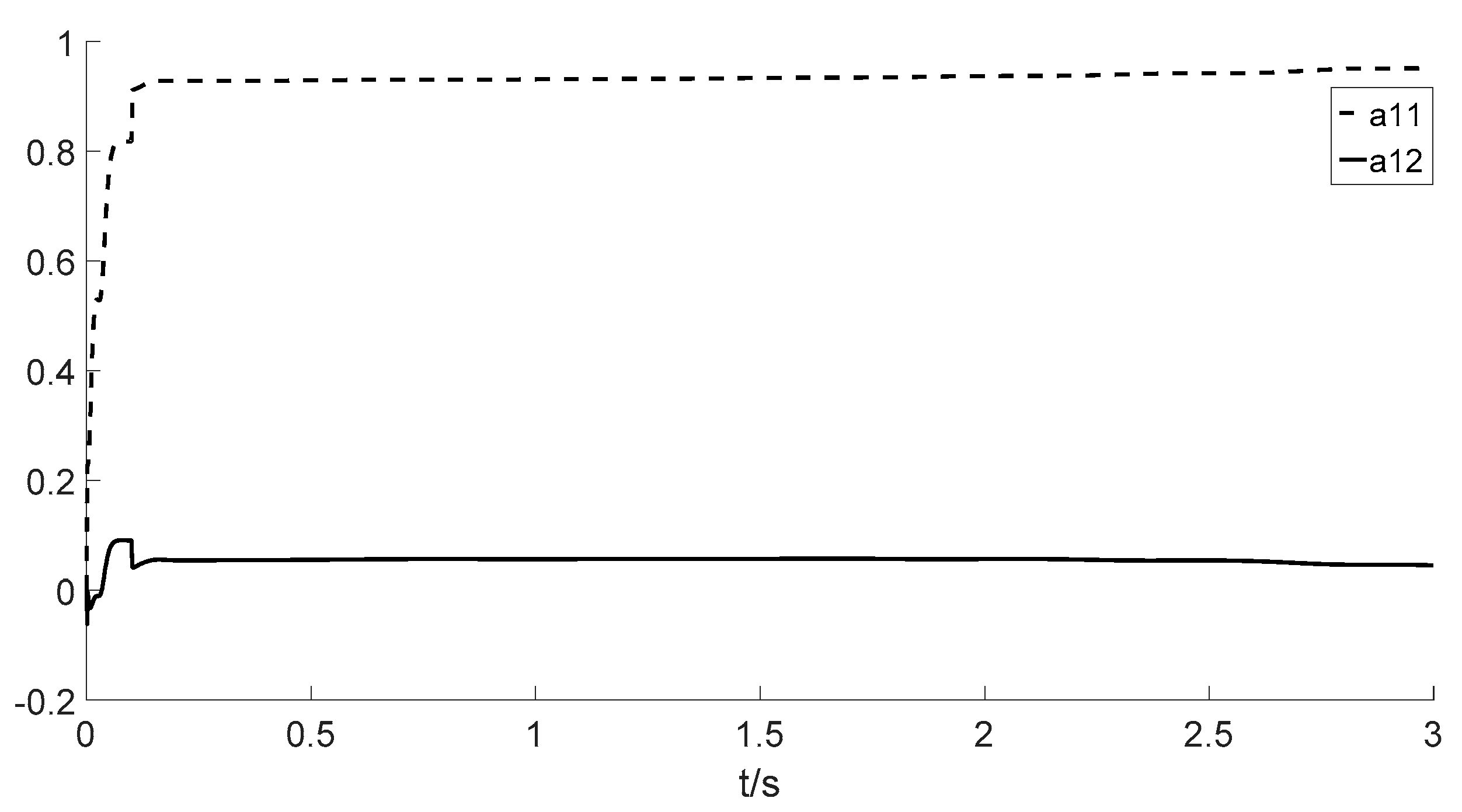
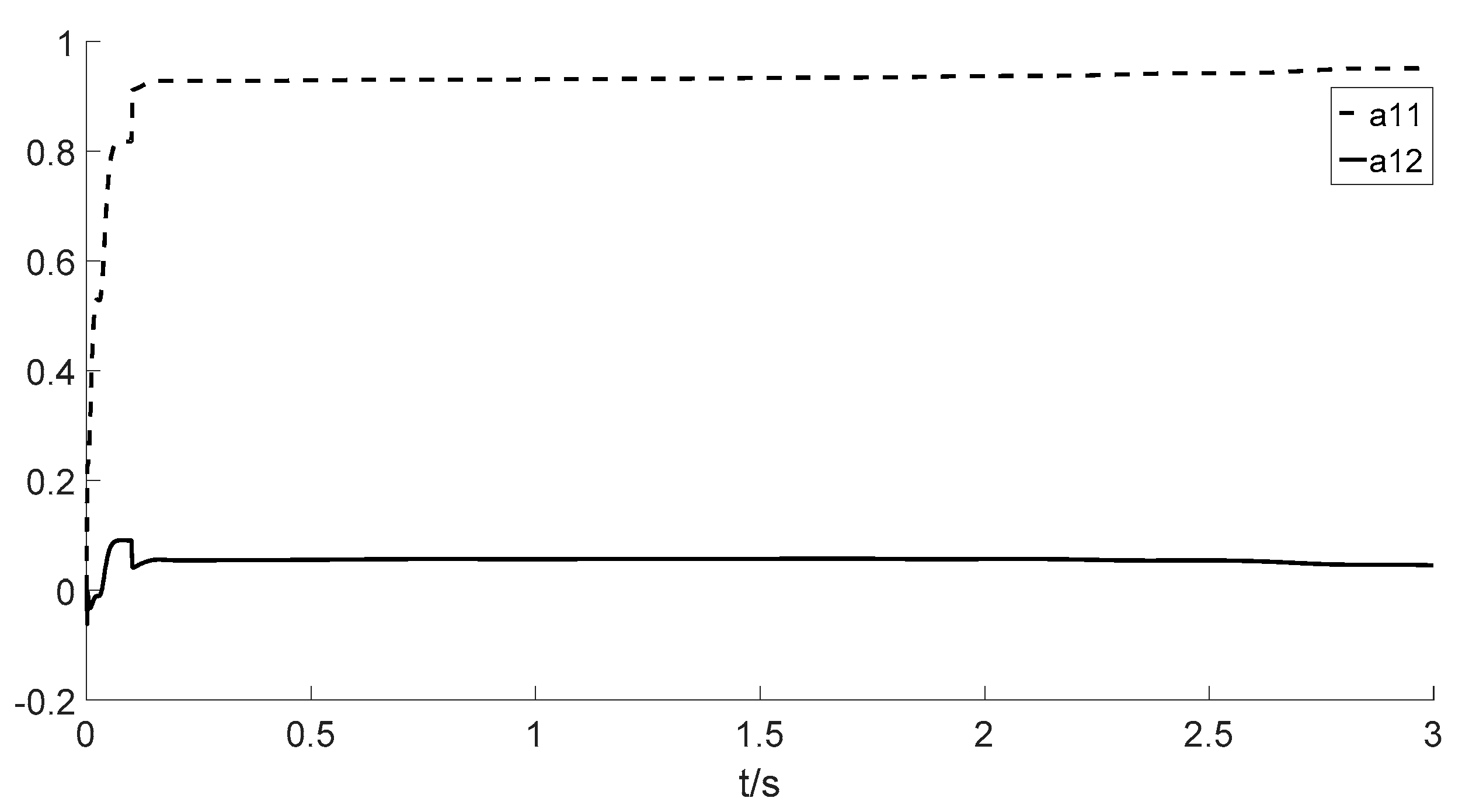
3.2. Coefficient
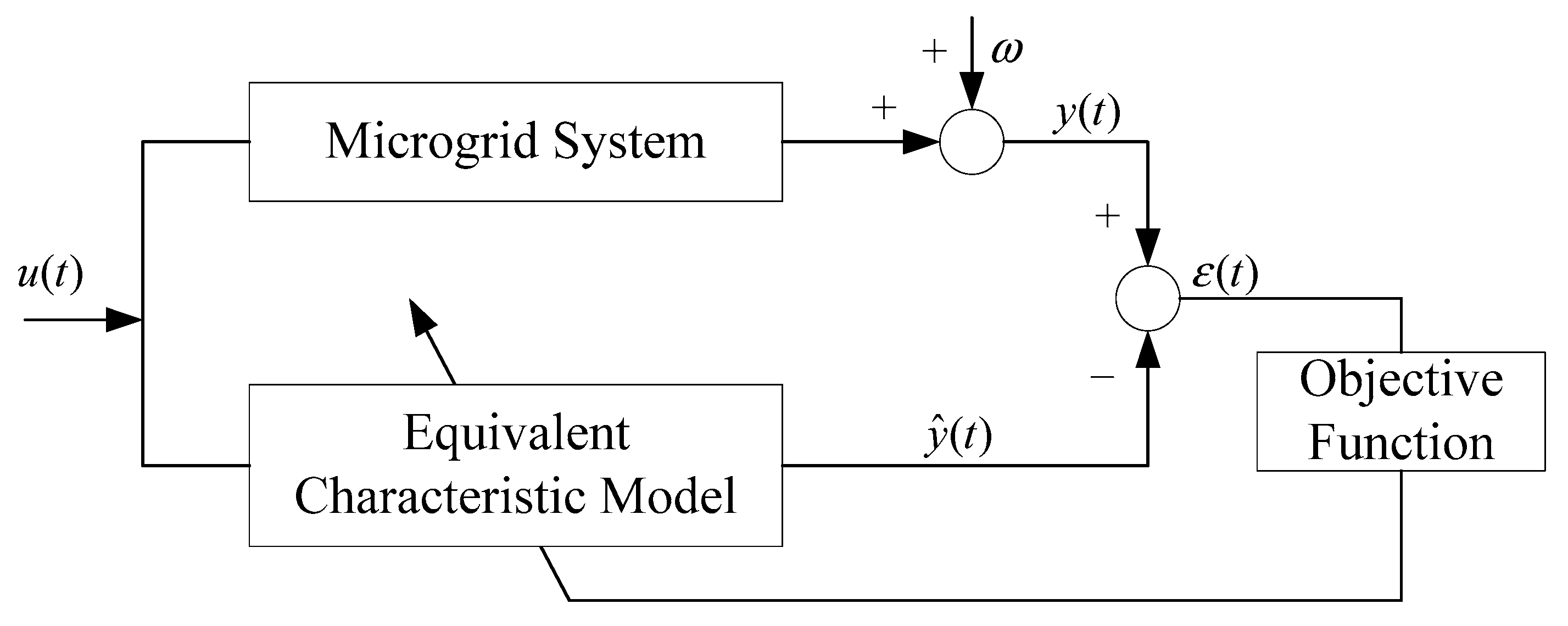
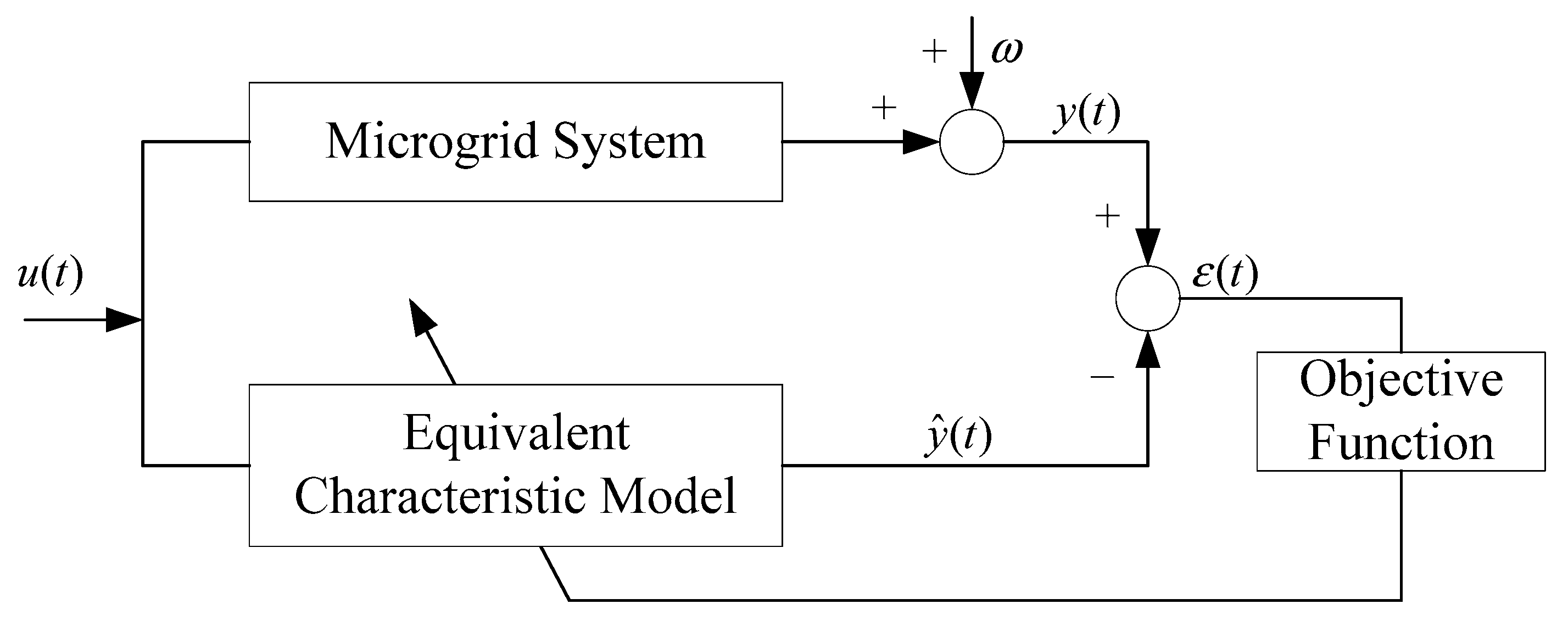
3.3. Microgrid Equivalent Modeling Based on Characteristic Model
3.4. Parameter Identification Based on Recursive DampedLeast SquaresAlgorithm
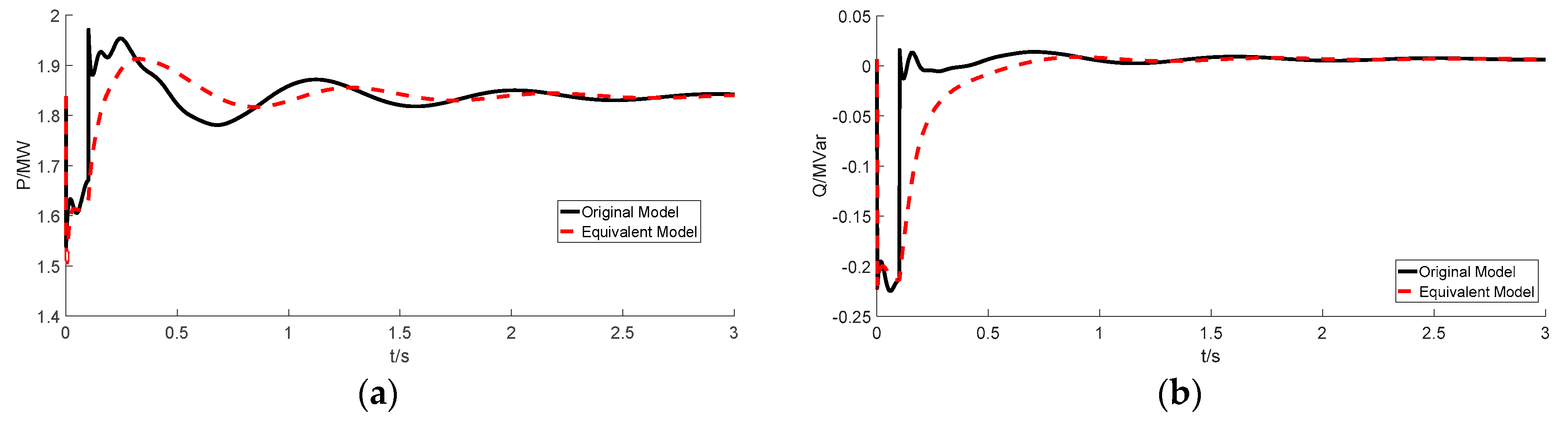
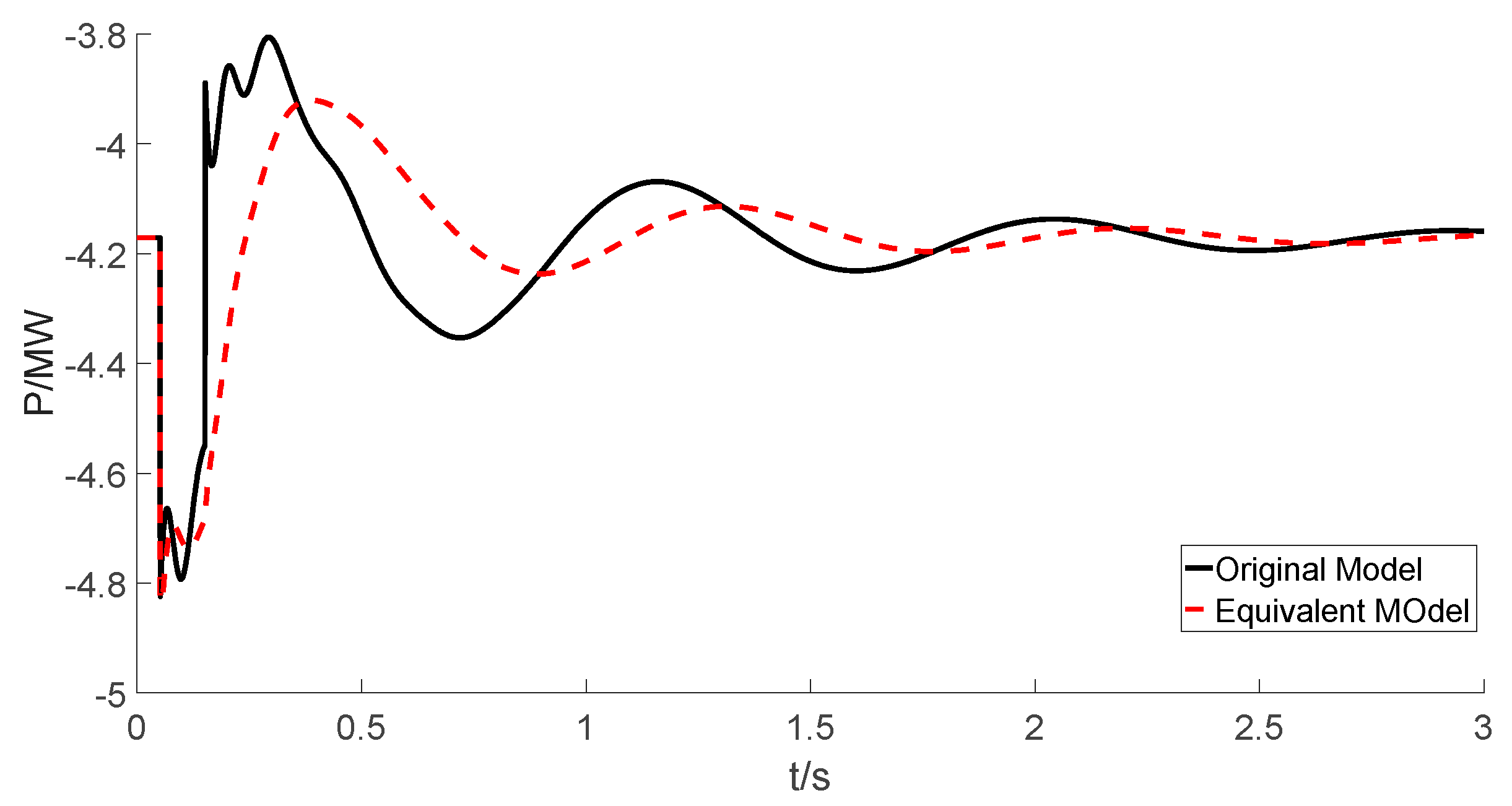
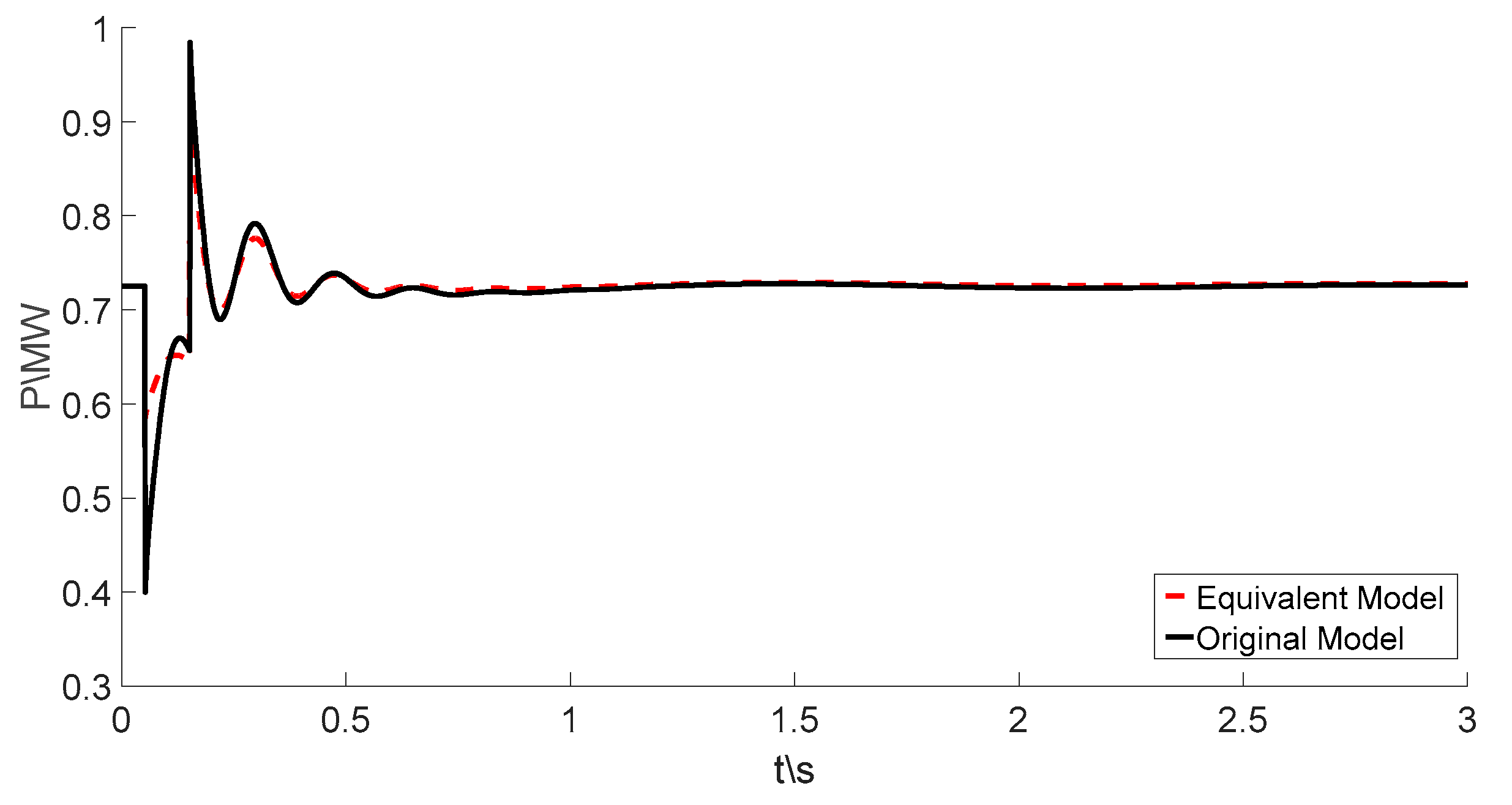
4. Results and Discussion
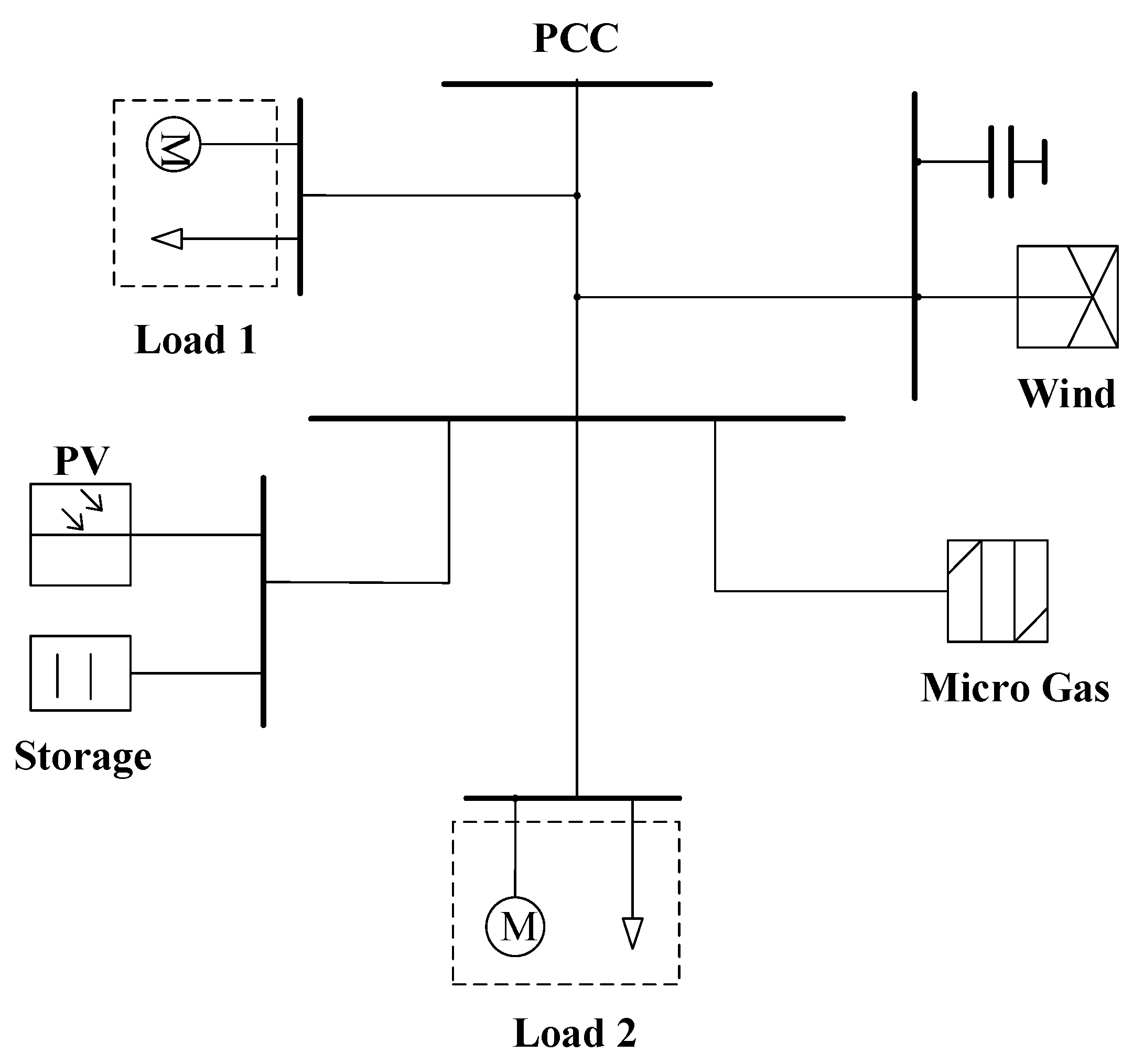
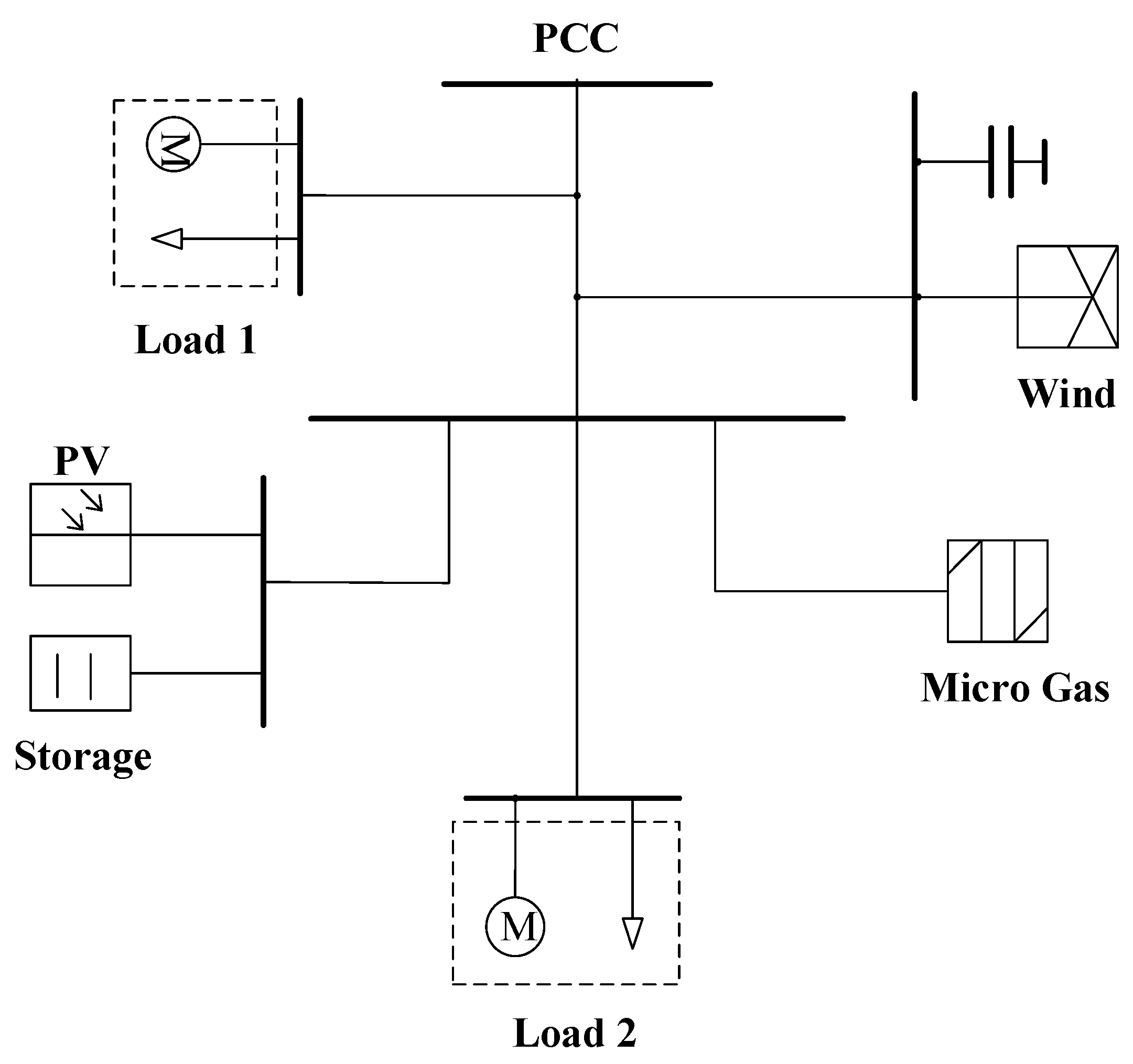
4.1. Simulation System
4.2. Measurement Data
4.3. Characteristic Modeling Based on Faults
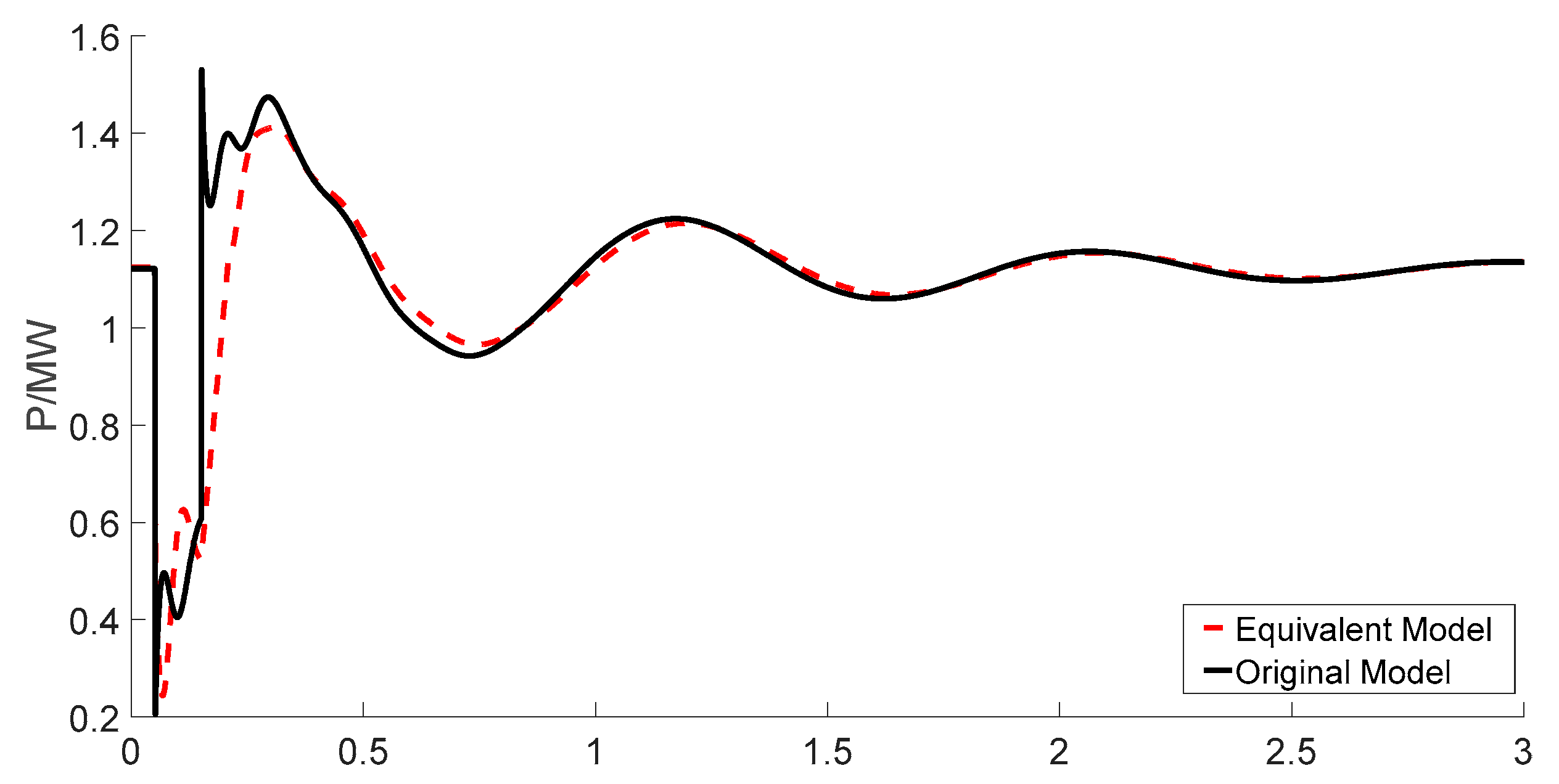
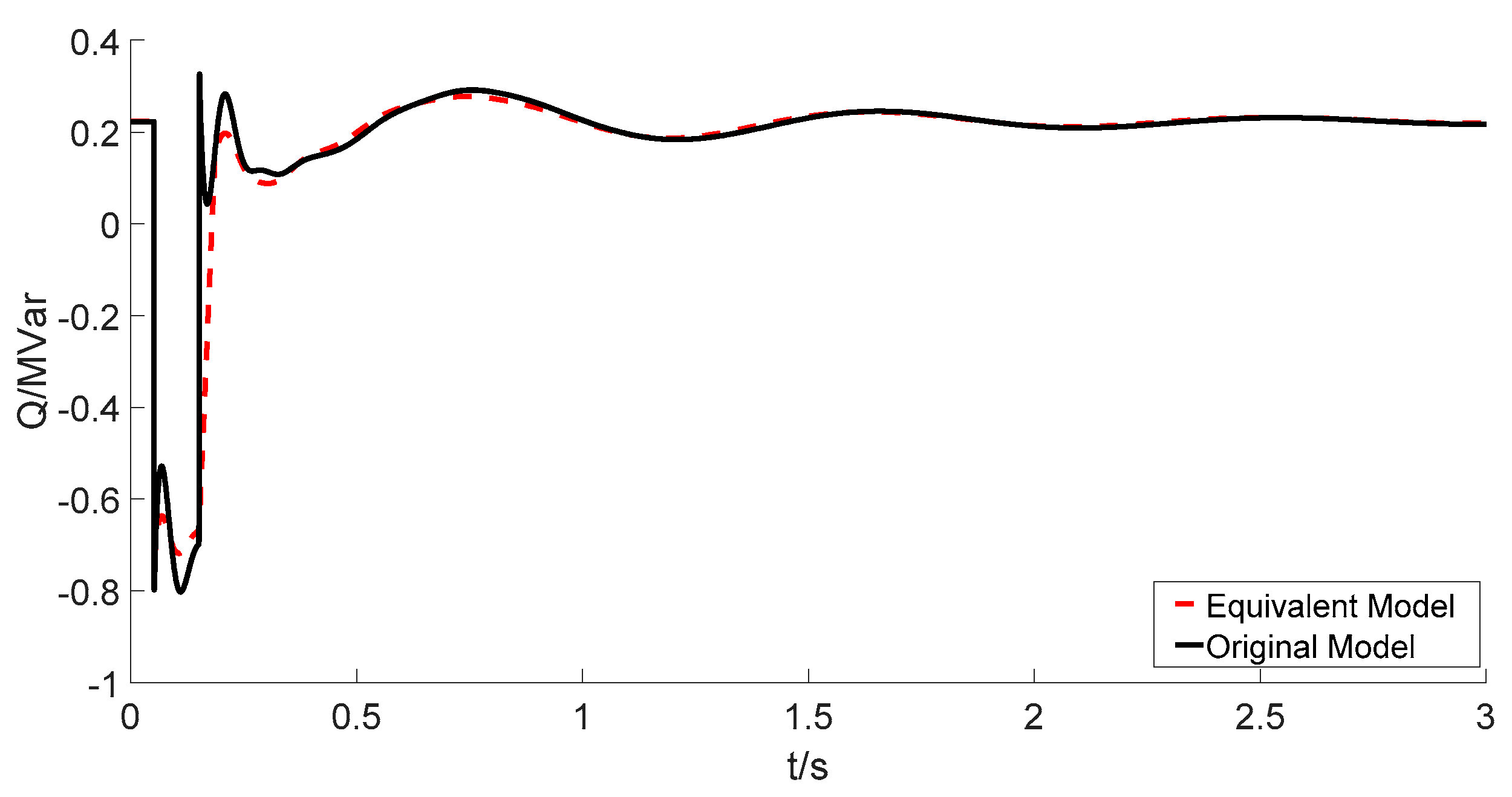
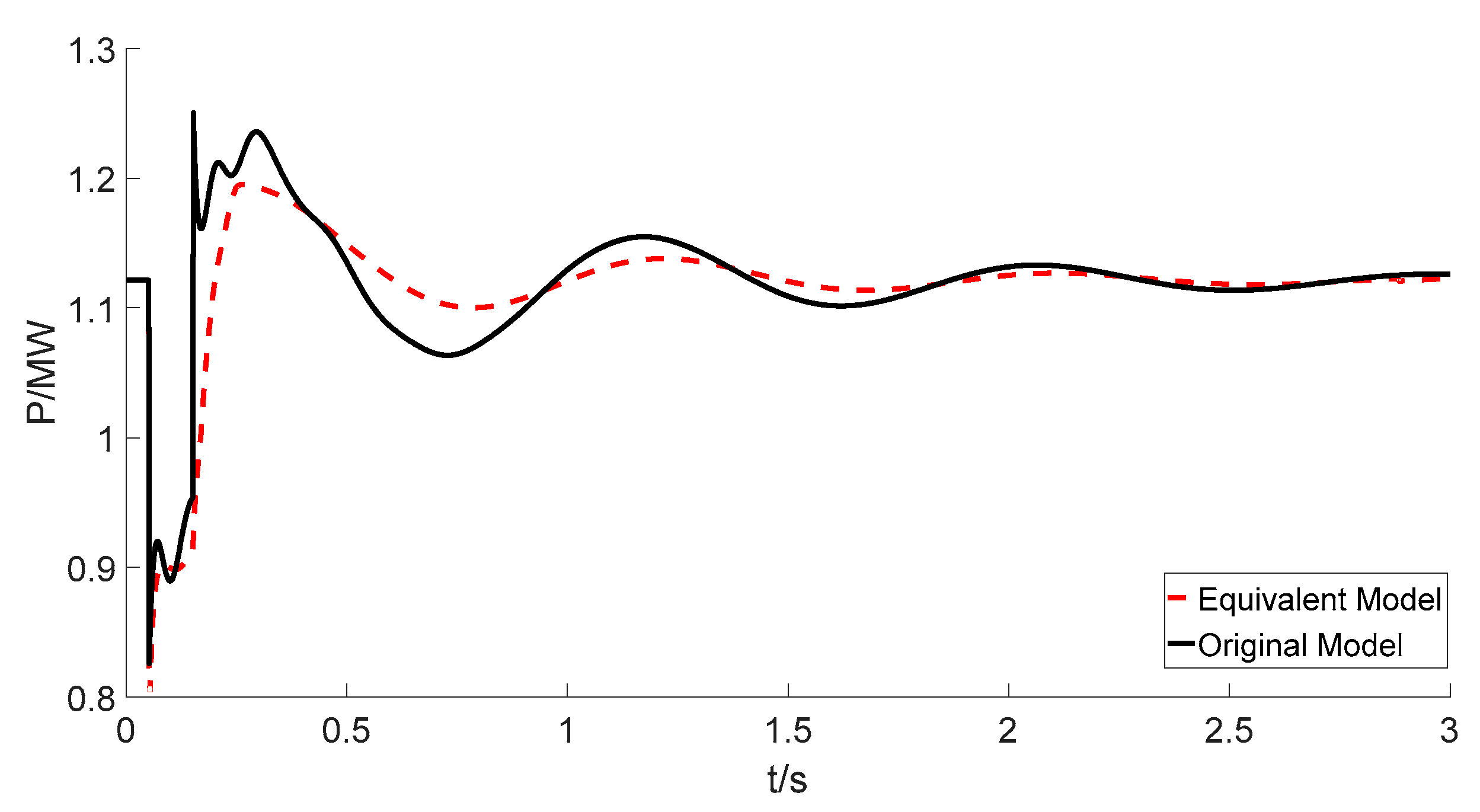
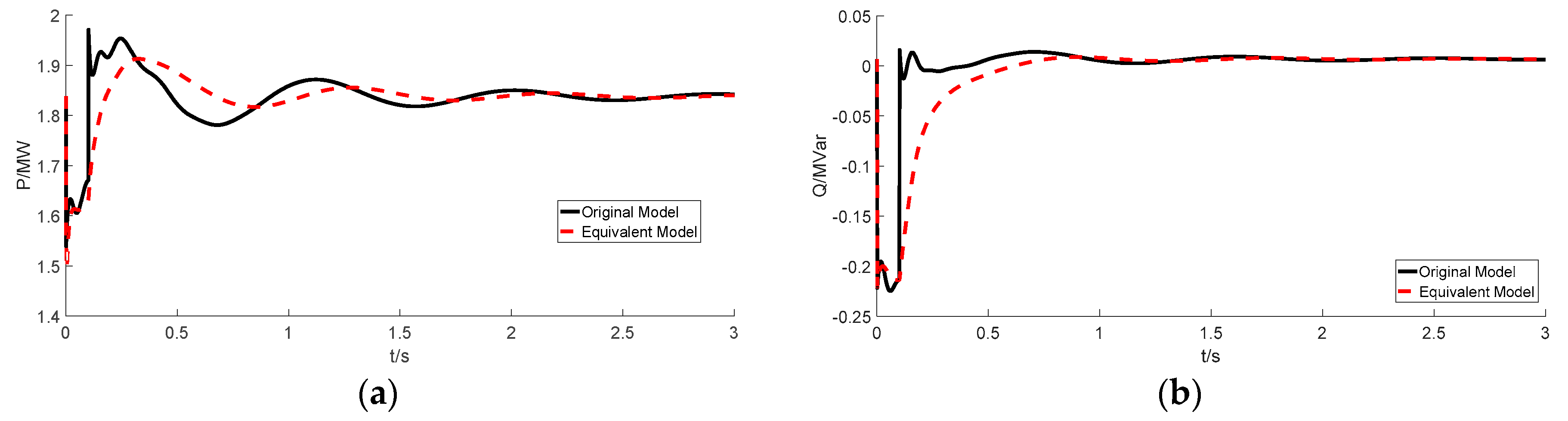
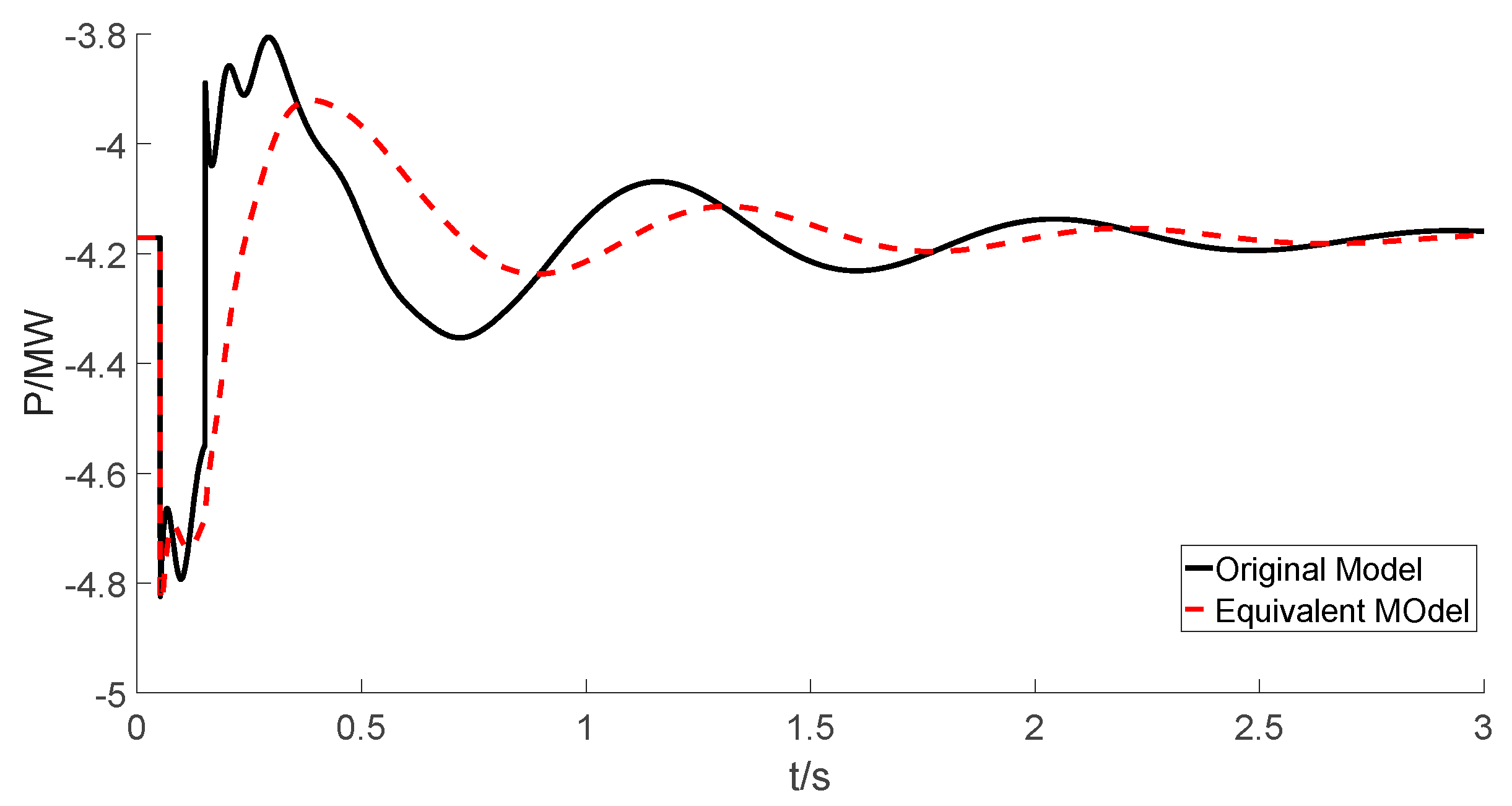
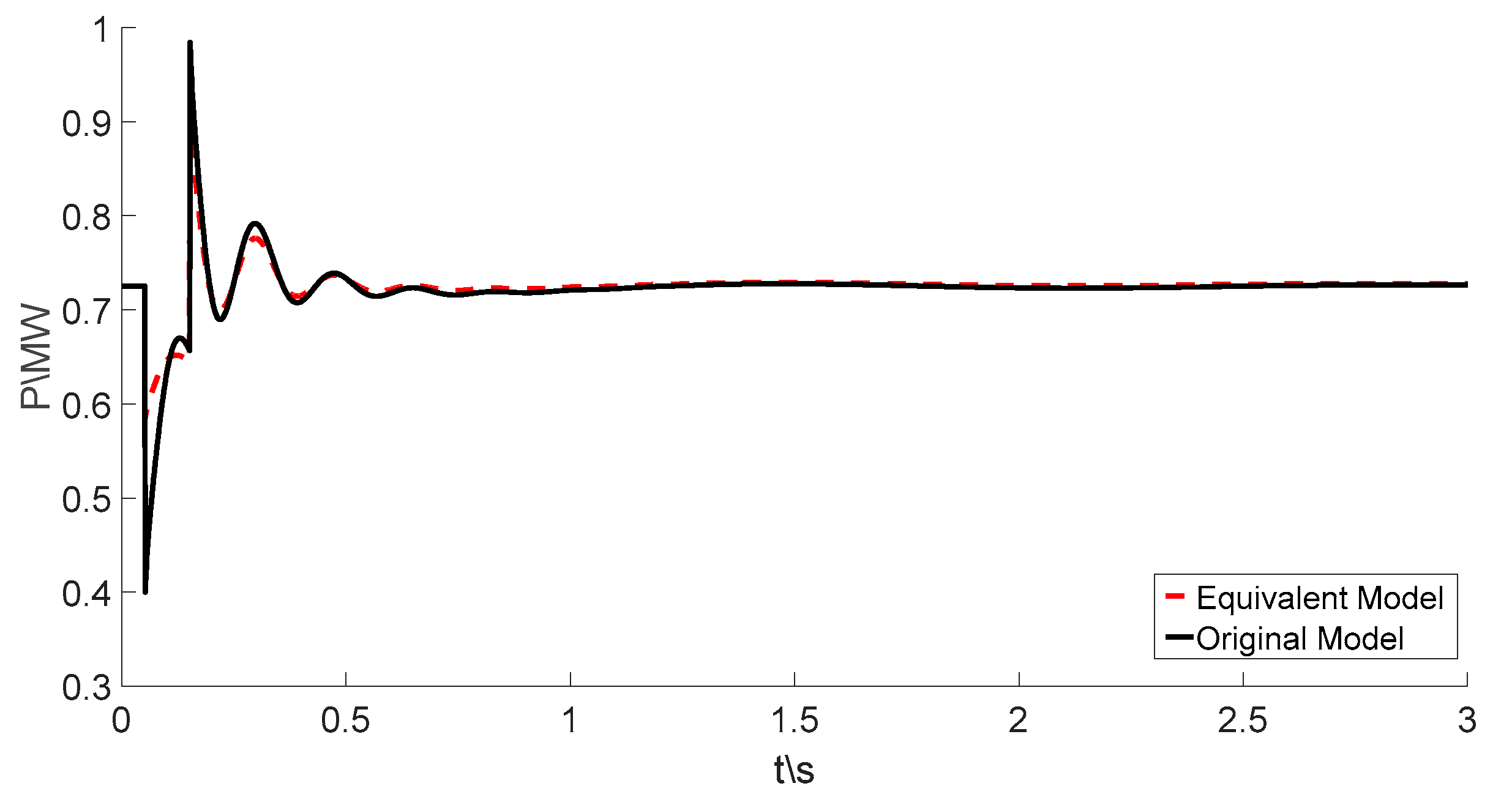
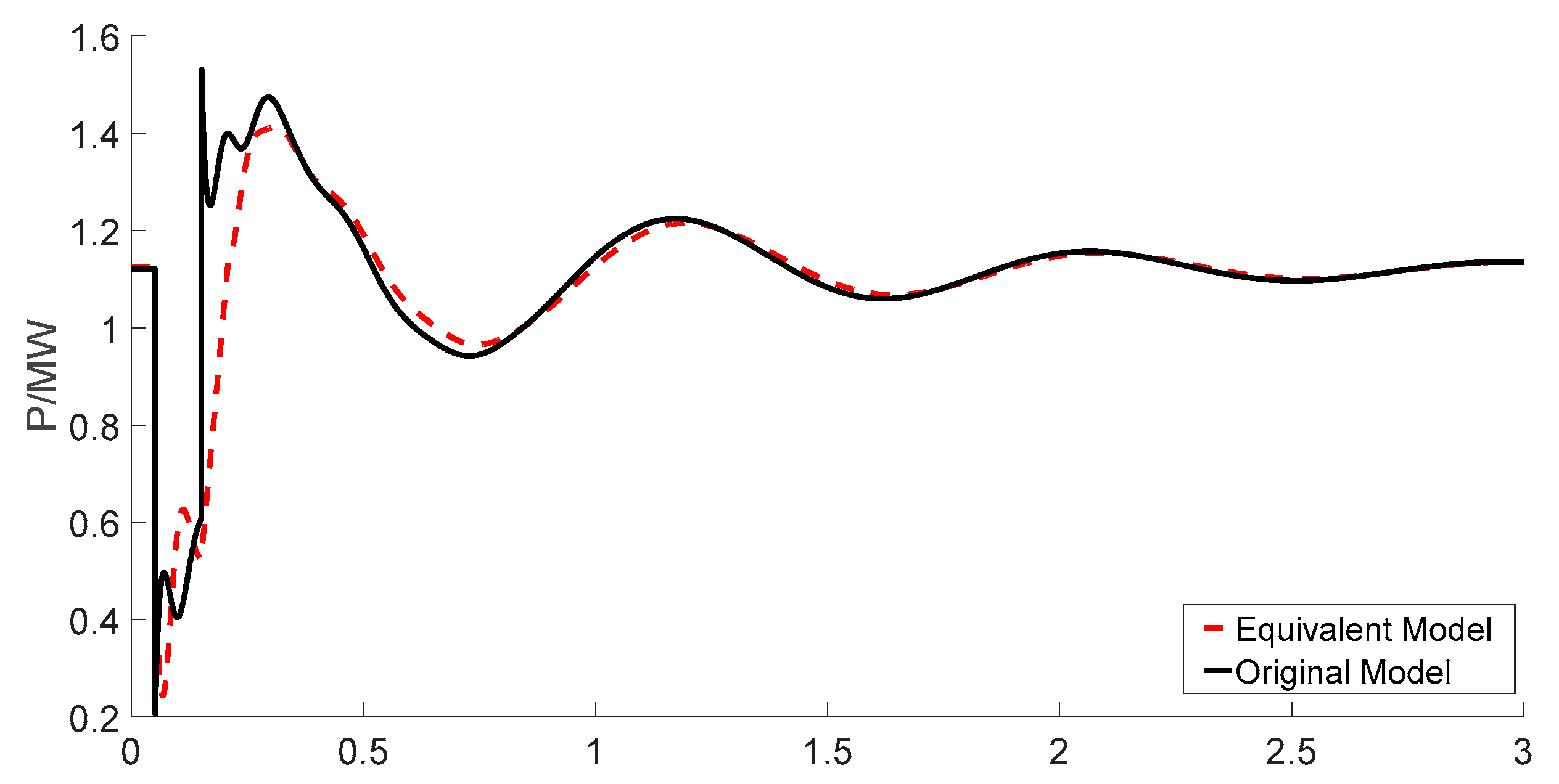
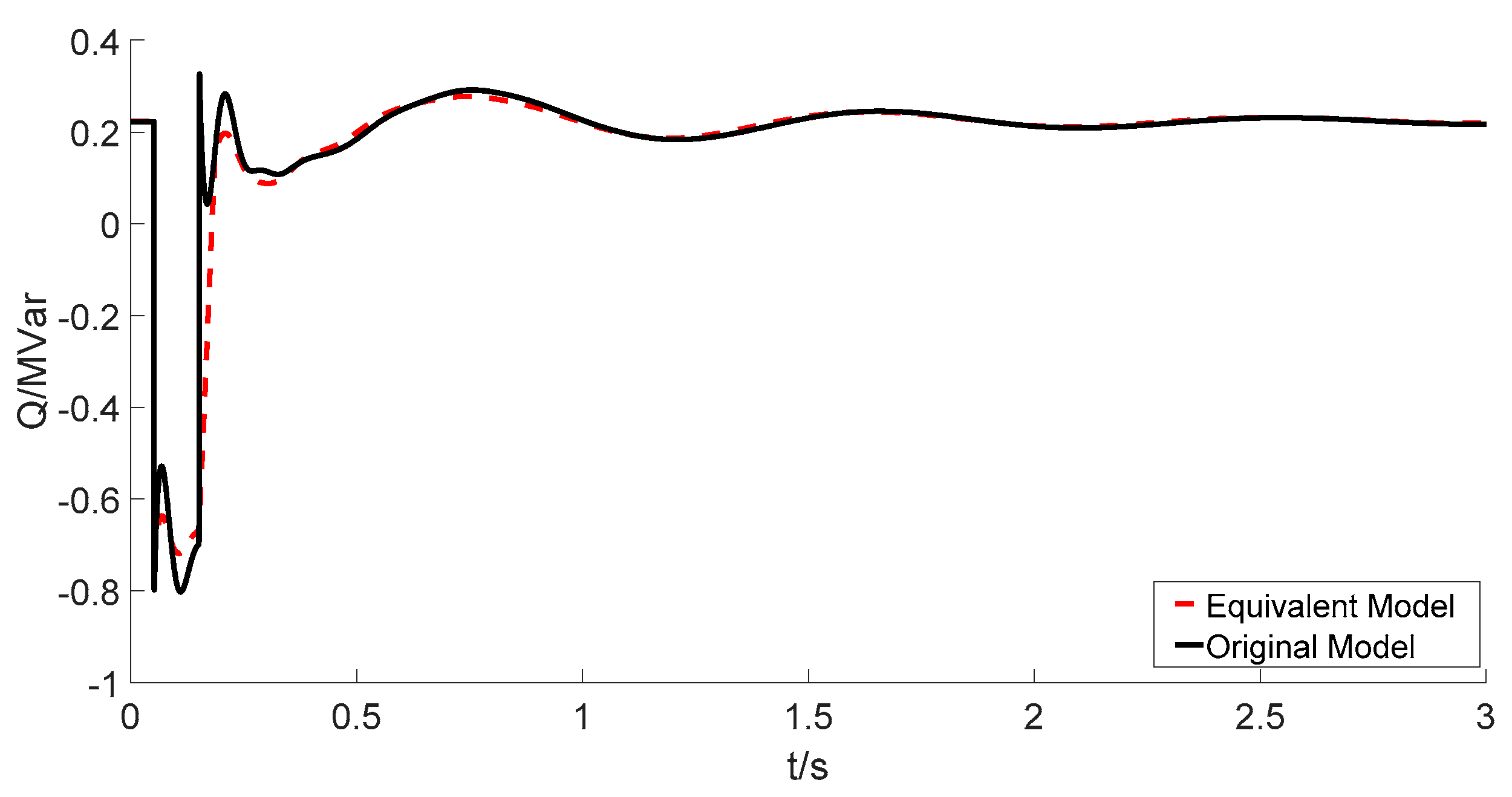
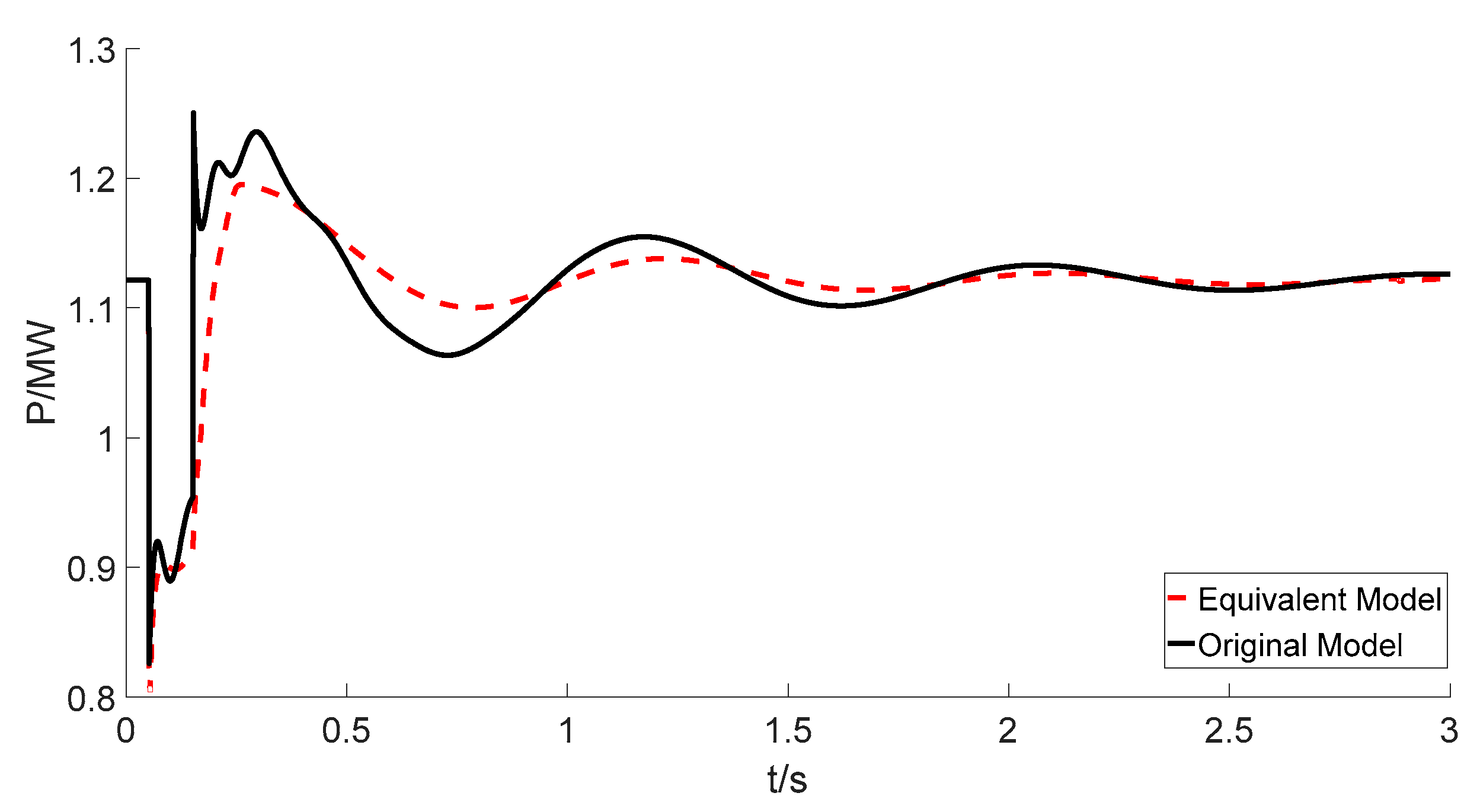
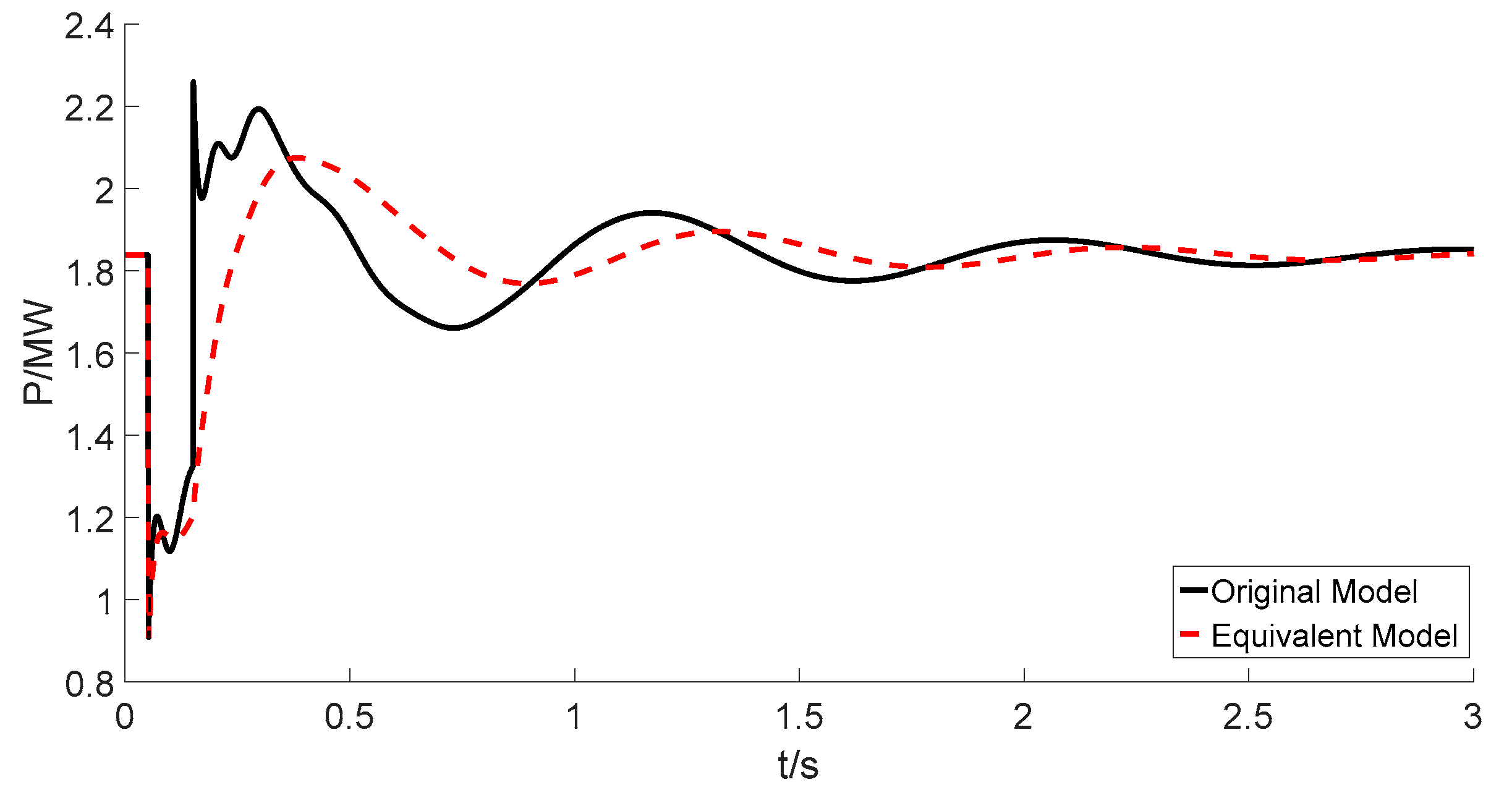
4.4. Model Development
5. Conclusions
Acknowledgment
Author Contributions
Conflicts of Interest
References
- Venkata, S.S.; Pahwa, A.; Brown, R.E.; Christie, D.R. What future distribution engineers need to learn. IEEE Trans. Power Syst. 2004, 19, 17–23. [Google Scholar] [CrossRef]
- Chen, C.; Wang, J.H.; Qiu, F. Resilient distribution system by microgrids formation after natural disasters. IEEE Trans. Smart Grid 2016, 7, 958–966. [Google Scholar] [CrossRef]
- Ou, T.C.; Hong, C.M. Dynamic operation and control of microgrid hybrid power systems. Energy 2014, 66, 314–323. [Google Scholar] [CrossRef]
- Simpson-Porco, J.W.; Dorfler, F.; Bullo, F. Voltage stabilization in microgrids via quadratic droop control. IEEE Trans. Autom. Control 2017, 62, 1239–1253. [Google Scholar] [CrossRef]
- Ou, T.C. A novel unsymmetrical faults analysis for microgrid distribution systems. Int. J. Electr. Power Energy Syst. 2012, 43, 1017–1024. [Google Scholar] [CrossRef]
- Jedrzejczak, J.; Anders, G.J.; Fotuhi-Firuzabad, M.; Farzin, H.; Aminifar, F. Reliability assessment of protective relays in harmonic polluted power systems. IEEE Trans. Power Deliv. 2017, 32, 556–564. [Google Scholar] [CrossRef]
- Arya, S.R.; Singh, B.; Niwas, R.; Chandra, A.; Ai-Haddad, K. Power quality enhancement using DSTATCOM in distributed power generation system. IEEE Trans. Ind. Appl. 2016, 52, 5203–5212. [Google Scholar] [CrossRef]
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, J.W. Reduced-order small-signal model of microgrid systems. IEEE Trans. Sustain. Energy 2015, 6, 1295–1305. [Google Scholar] [CrossRef]
- Tang, X.; Deng, W.; Qi, Z. Investigation of the dynamic stability of microgrid. IEEE Trans. Power Syst. 2014, 29, 698–706. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Canizares, C.A.; Iracani, R.; Kazerani, M.; Hajimiragha, A.H.; Saeedifard, M.; Gomis-Bellmunt, O.; Palma-Behnke, R.; et al. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Lasseter, R.; Akhil, A.; Marnay, C.; Stephens, J.; Dagle, J.; Guttromson, R.; Meliopoulous, A.S.; Yinger, R.; Eto, J. Integration of Distributed Energy Resources: The CERTS MicroGrid Concept. Available online: http://escholarship.org/uc/item/9w88z7z1#page-1 (accessed on 16 October 2017).
- Ourari, M.L.; Dessaint, L.A.; Do, V.Q. Dynamic equivalent modeling of large power systems using structure preservation technique. IEEE Trans. Power Syst. 2006, 21, 1284–1295. [Google Scholar] [CrossRef]
- Kim, A.R.; Seo, H.R.; Kim, G.H.; Park, M.W.; Yu, I.K.; Otsuki, Y.; Tamura, J.; Kim, S.H.; Sim, K.D.; Seong, K.C. Operating characteristic analysis of HTS SMES for frequency stabilization of dispersed power generation system. IEEE Trans. Appl. Supercond. 2010, 20, 1334–1338. [Google Scholar]
- Zhao, B.; Zhang, X.S.; Chen, J. Integrated Microgrid Laboratory System. IEEE Trans. Power Syst. 2012, 27, 2175–2185. [Google Scholar] [CrossRef]
- Ju, P.; Ni, L.Q.; Wu, F. Dynamic Equivalents of Power Systems with Online Measurements. Part 1: Theory. IEE Proc. Gener. Trans. Distrib. 2004, 151, 175–178. [Google Scholar] [CrossRef]
- Cai, C.C.; Jiang, B.; Deng, L.H. General Dynamic Equivalent Modeling of Microgrid Based on Physical Background. Energies 2015, 8, 12929–12948. [Google Scholar] [CrossRef]
- Cai, C.C.; Cao, X.Q. Equivalent Simplification Method of Micro-grid. Telkomnika 2013, 11, 5461–5470. [Google Scholar]
- Zha, X.M.; Zhang, Y.; Cheng, Y.; Fan, Y.P. New method of extended coherency for Microgrid based on homology in differential geometry. Trans. China Electr. Soc. 2012, 27, 24–31. [Google Scholar]
- Resende, F.O.; Lopes, J.A.P. Development of dynamic equivalents for microgrids using system identification theory. In Proceedings of the 2007 IEEE Lausanne Power Tech, Lausanne, Switzerland, 1–5 July 2007; pp. 1033–1038. [Google Scholar]
- Stankovic, A.M.; Saric, A.T. Transient power system analysis withmeasurement-based gray box and hybrid dynamic equivalents. IEEE Trans. Power Syst. 2004, 19, 455–462. [Google Scholar] [CrossRef]
- Milanovic, J.V.; Zali, S.M. Generic Model of Active Distribution Network for Large Power System Stability Studies. IEEE Trans. Power Syst. 2013, 28, 3126–3133. [Google Scholar]
- Azmy, A.M.; Erlich, I.; Sowa, P. Artificial Neural Network-Based Dynamic Equivalents for Distribution Systems Containing Active Sources. IEE Proc. Gener. Trans. Distrib. 2004, 151, 681–688. [Google Scholar] [CrossRef]
- PPapadopoulos, N.; Papadopoulos, T.A.; Crolla, P.; Roscoe, A.J.; Papagiannis, G.K.; Butt, G.M. Black-box dynamic Equivalent Model for Microgrids Using Measuring Data. IET Gener. Trans. Distrib. 2014, 8, 851–861. [Google Scholar] [CrossRef] [Green Version]
- Papadopoulos, P.N.; Papadopoulos, T.A.; Crolla, P.; Roscoe, A.J.; Papagiannis, G.K.; Burt, G.M. Measurement-Based Analysis of the Dynamic Performance of Microgrids Using System Identification Techniques. IET Gener. Trans. Distrib. 2015, 9, 90–103. [Google Scholar] [CrossRef]
- Kumar Nunna, H.; Doolla, S. Multiagent-based distributed-energy-resource management for intelligent microgrids. IEEE Trans. Ind. Electron. 2012, 60, 1678–1687. [Google Scholar] [CrossRef]
- Gomez-Sanz, J.J.; Garcia-Rodriguez, S.; Cuartero-Soler, N.; Hernandez-Callejo, L. Reviewing microgrids from a multi-agent systems perspective. Energies 2014, 7, 3355–3382. [Google Scholar] [CrossRef]
- Wu, H.X.; Hu, J.; Xie, Y.C.; Meng, B.; Lin, Z.L. Theory and Applications of Characteristic Modeling: An Introductory Overview. Int. J. Intell. Control Syst. 2015, 20, 1–8. [Google Scholar]
- Zhou, C.J.; Shi, Y.F.; Yang, S.H.; Yin, Q.; Qin, Y.Q. Characteristic Model-Based Adaptive Discrete-Time Sliding Mode Control for the Swing Arm in a Fourier Transform Spectrometer. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2012, 42, 1633–1643. [Google Scholar] [CrossRef]
- Wu, Y.F.; Wang, Z.H.; Li, Y.Y.; Chen, W.; Du, R.H.; Chen, Q.W. Characteristic Modeling and Control of Servo Systems with Backlash and Friction. Math. Probl. Eng. 2014, 2014, 328450. [Google Scholar] [CrossRef]
- Han, J.; Solanki, S.K.; Solanki, J. Coordinated Predictive Control of a Wind/Battery Microgrid System. IEEE J. Emerging Sel. Top. Power Electr. 2013, 1, 296–305. [Google Scholar] [CrossRef]
- Campanhol, L.B.G.; Silva, S.A.O.; Oliveira, A.A.; Bacon, V.D. Single-Stage Three-Phase Grid-Tied PV System With Universal Filtering Capability Applied to DG System and AC Microgrids. IEEE Trans. Power Electr. 2017, 32, 9131–9142. [Google Scholar] [CrossRef]
- Wu, D.; Tang, F.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Autonomous Active Power Control for Islanded AC Microgrids With Photovoltaic Generation and Energy Storage System. IEEE Trans Energy Convers. 2014, 29, 882–892. [Google Scholar] [CrossRef]
- Thale, S.S.; Wandhare, R.G.; Agarwal, V. A Novel Reconfigurable Microgrid Architecture with Renewable Energy Sources and Storage. IEEE Trans. Ind. Appl. 2015, 51, 1805–1816. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1.0467 | −0.0486 | −0.0190 | 0.0199 | −0.0771 | −0.0534 |
| 0.9519 | 0.0452 | 0.0061 | −0.0012 | 0.0418 | 0.0373 |
| Method | Average Time (s) | Average Error |
|---|---|---|
| Characteristic modeling | 0.2159 | 0.98652 |
| Mechanism Modeling [16] | 3.1524 | 1.08623 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, C.; Liu, H.; Dai, W.; Deng, Z.; Zhang, J.; Deng, L. Dynamic Equivalent Modeling of a Grid-Tied Microgrid Based on Characteristic Model and Measurement Data. Energies 2017, 10, 1951. https://doi.org/10.3390/en10121951
Cai C, Liu H, Dai W, Deng Z, Zhang J, Deng L. Dynamic Equivalent Modeling of a Grid-Tied Microgrid Based on Characteristic Model and Measurement Data. Energies. 2017; 10(12):1951. https://doi.org/10.3390/en10121951
Chicago/Turabian StyleCai, Changchun, Haolin Liu, Weili Dai, Zhixiang Deng, Jianyong Zhang, and Lihua Deng. 2017. "Dynamic Equivalent Modeling of a Grid-Tied Microgrid Based on Characteristic Model and Measurement Data" Energies 10, no. 12: 1951. https://doi.org/10.3390/en10121951
APA StyleCai, C., Liu, H., Dai, W., Deng, Z., Zhang, J., & Deng, L. (2017). Dynamic Equivalent Modeling of a Grid-Tied Microgrid Based on Characteristic Model and Measurement Data. Energies, 10(12), 1951. https://doi.org/10.3390/en10121951