
Comprehensive Analysis of LCL Filter Interfaced Cascaded H-Bridge Multilevel Inverter-Based DSTATCOM



Abstract
:1. Introduction
2. System Description and Design
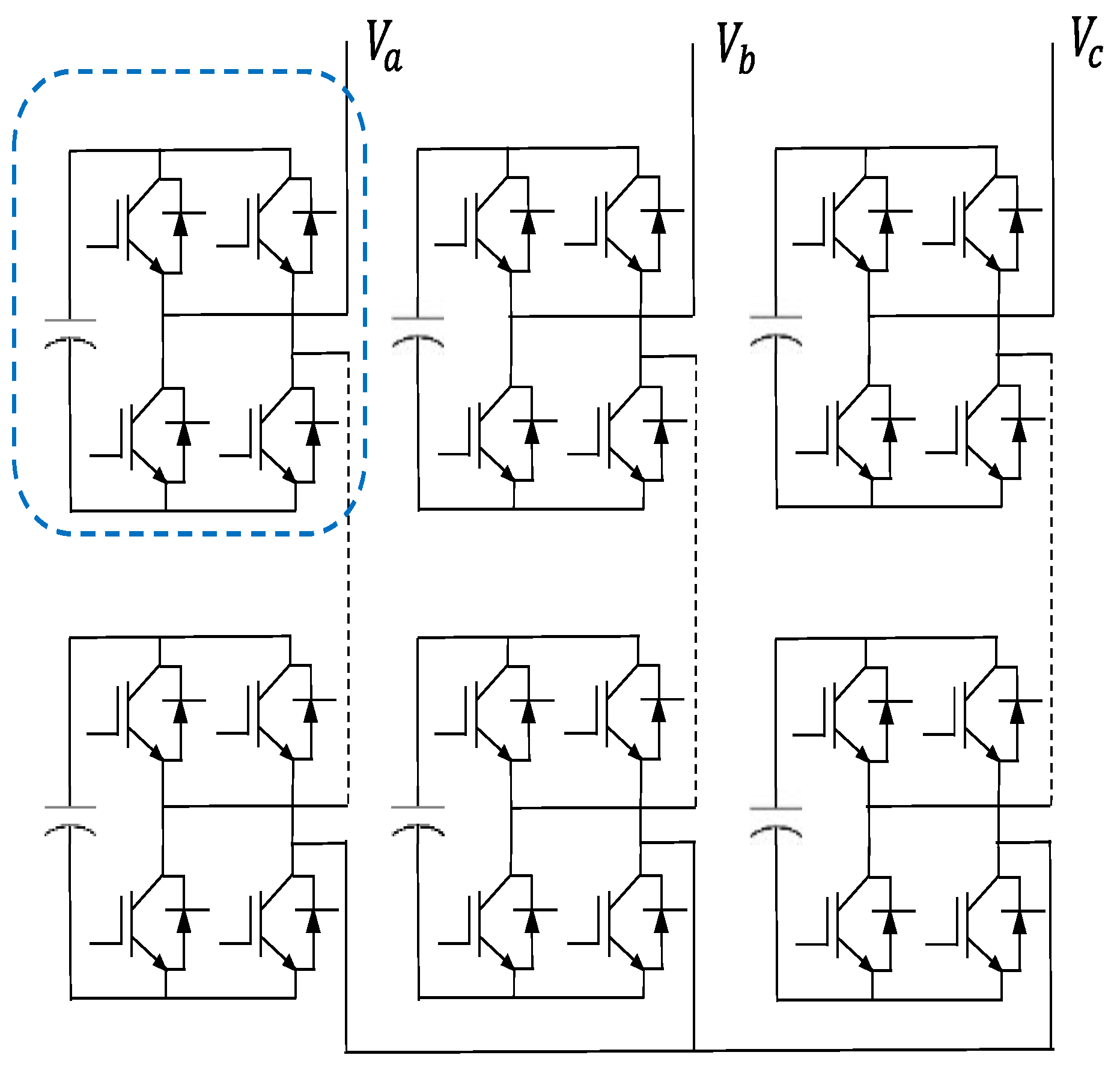
2.1. Basic Structure
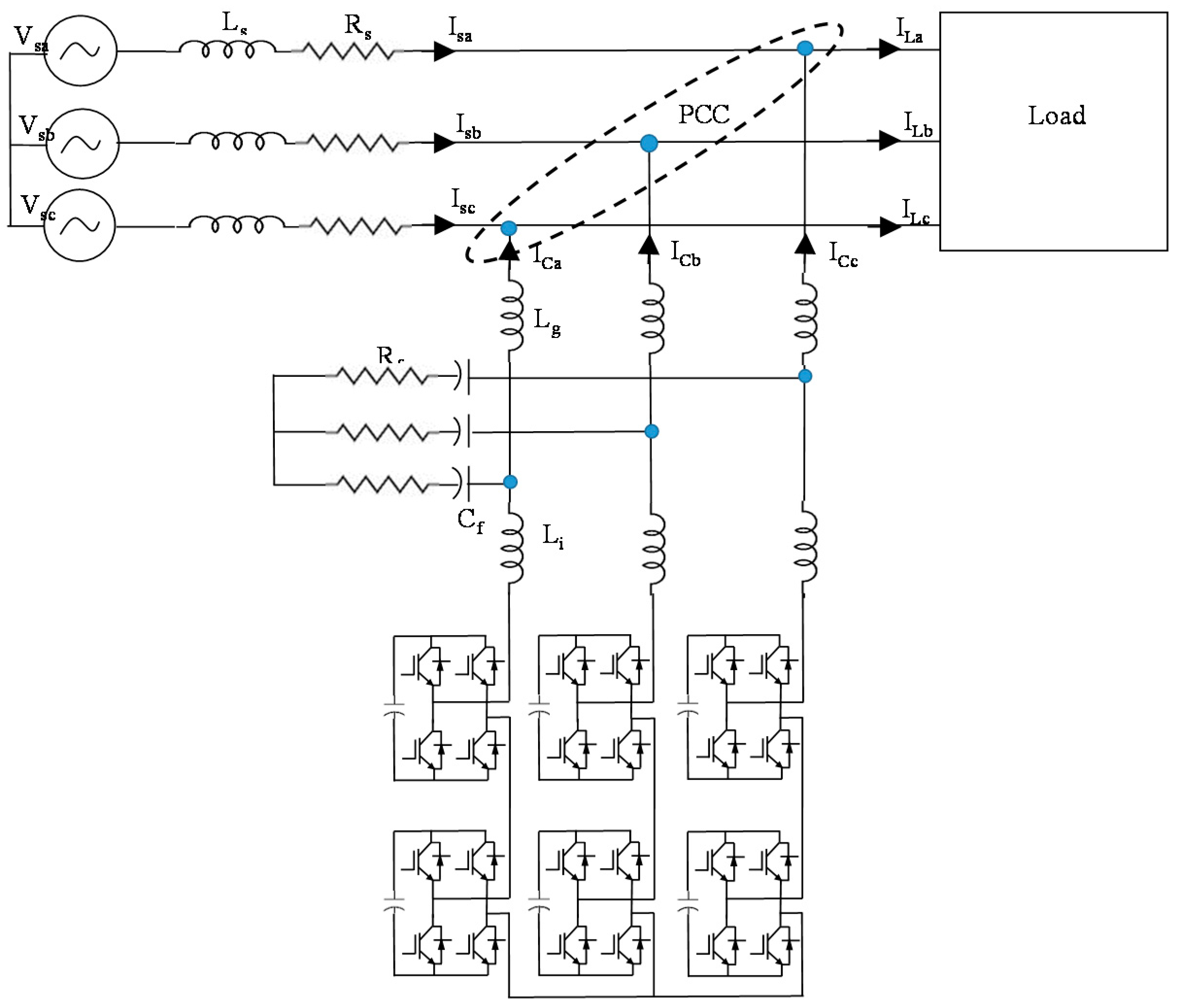
2.2. Implemented System
2.3. DC Link System
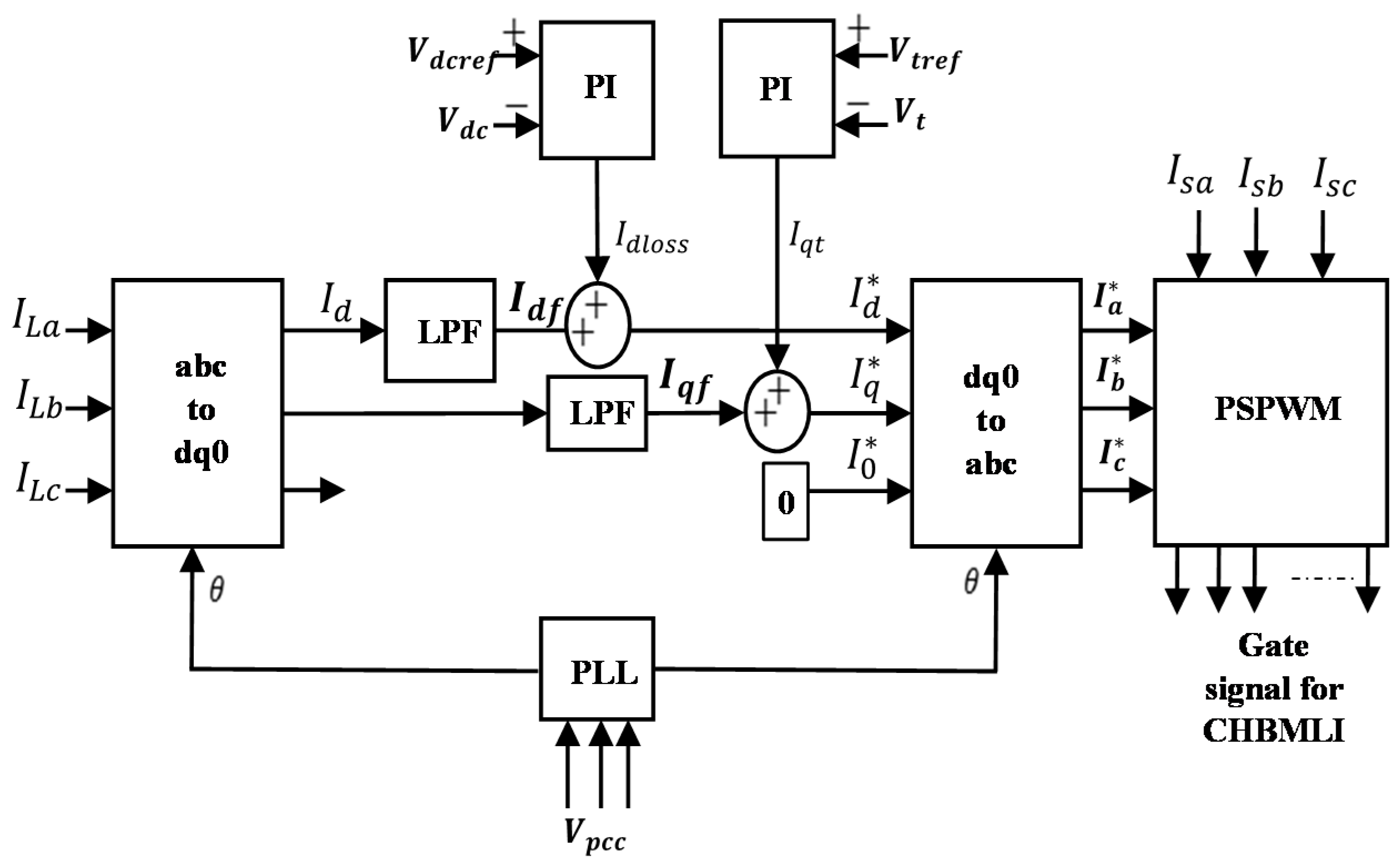
2.4. Reference Current Generation for CHBMLI
3. SPWM for CHBMLI
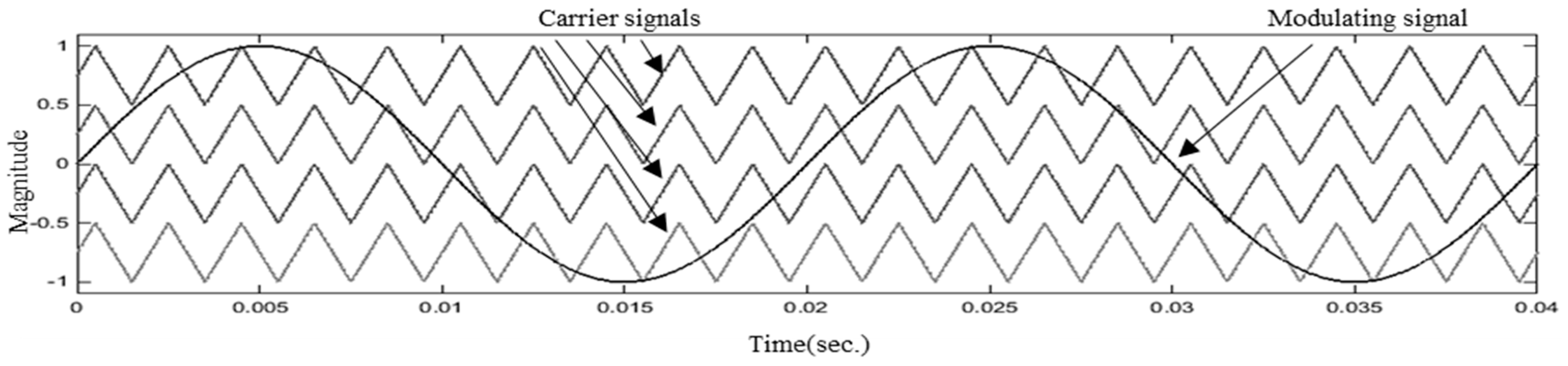
3.1. Level Shift Modulation-Based System
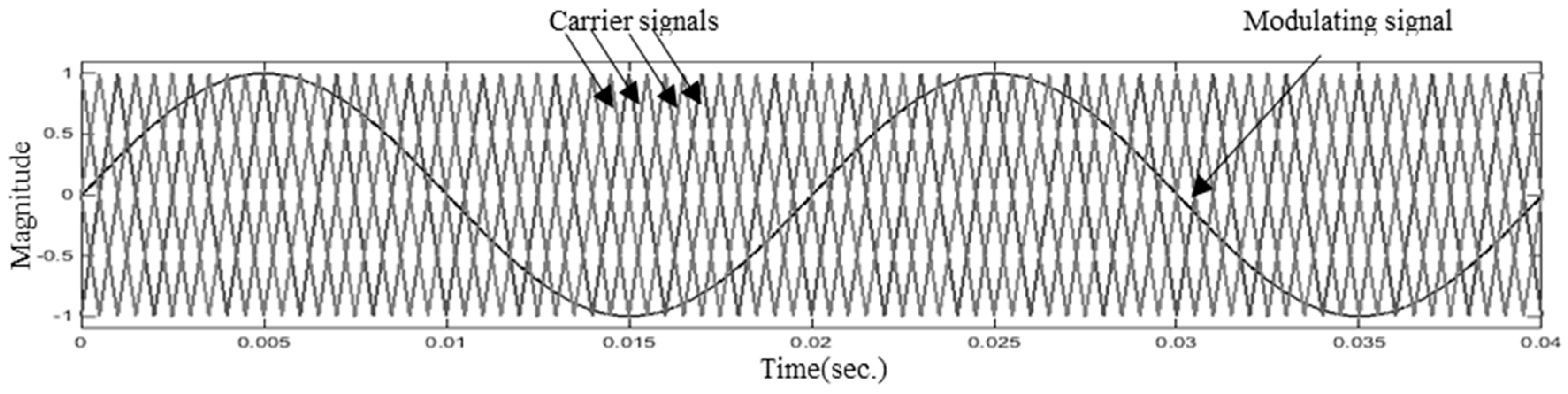
3.2. Phase Shift Modulation-Based System
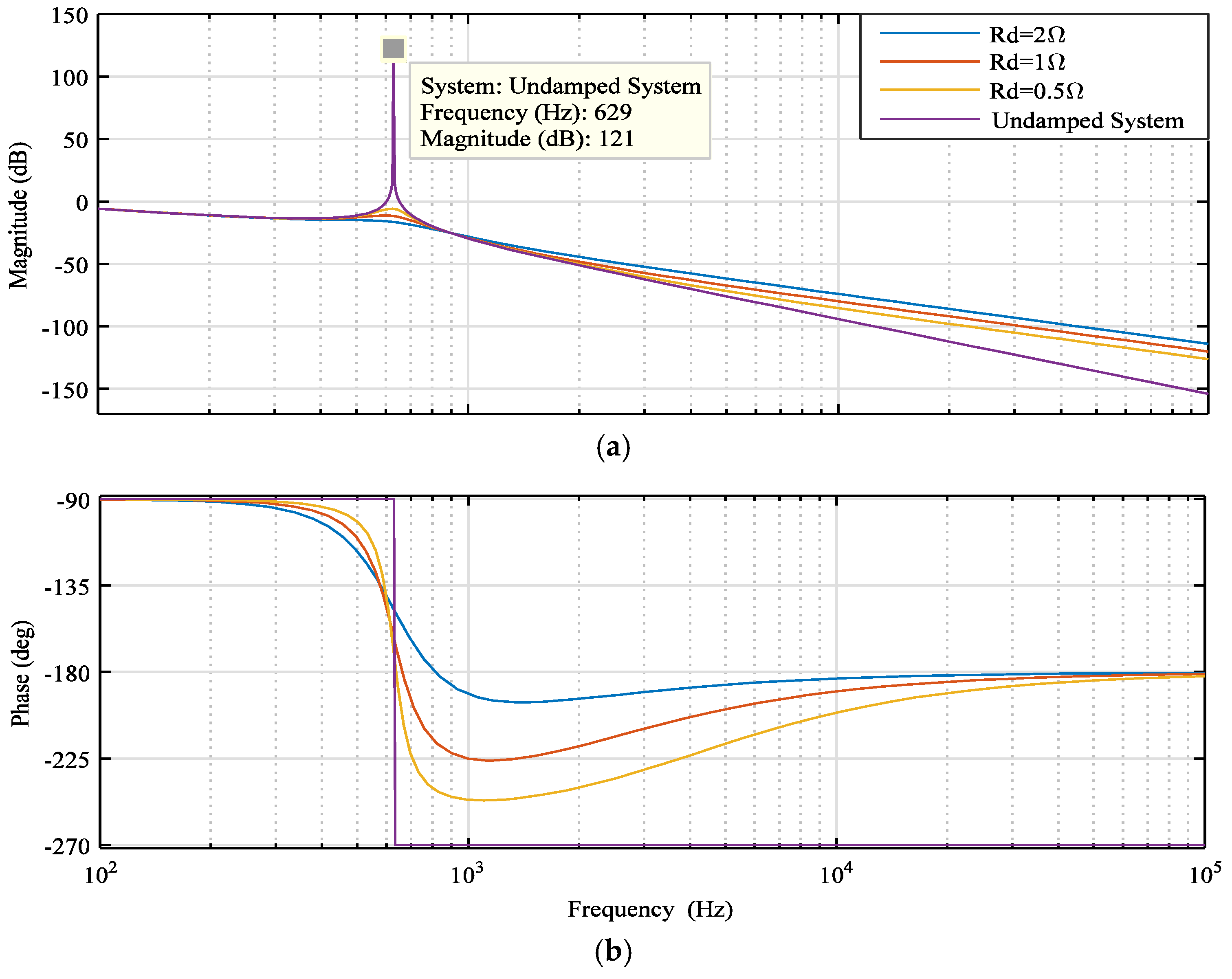
4. LCL Filter Design
5. Results and Discussion
5.1. System Performance
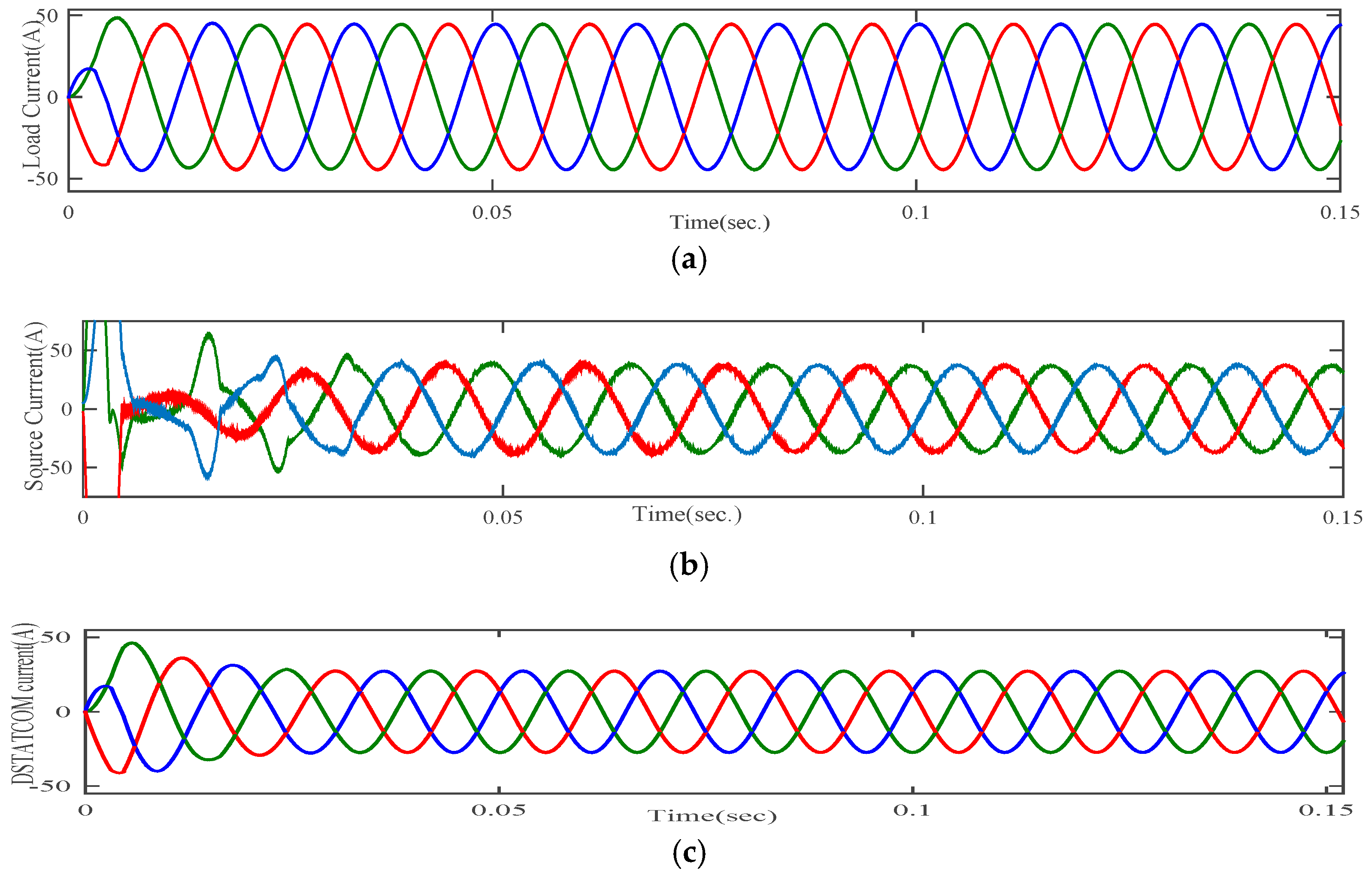
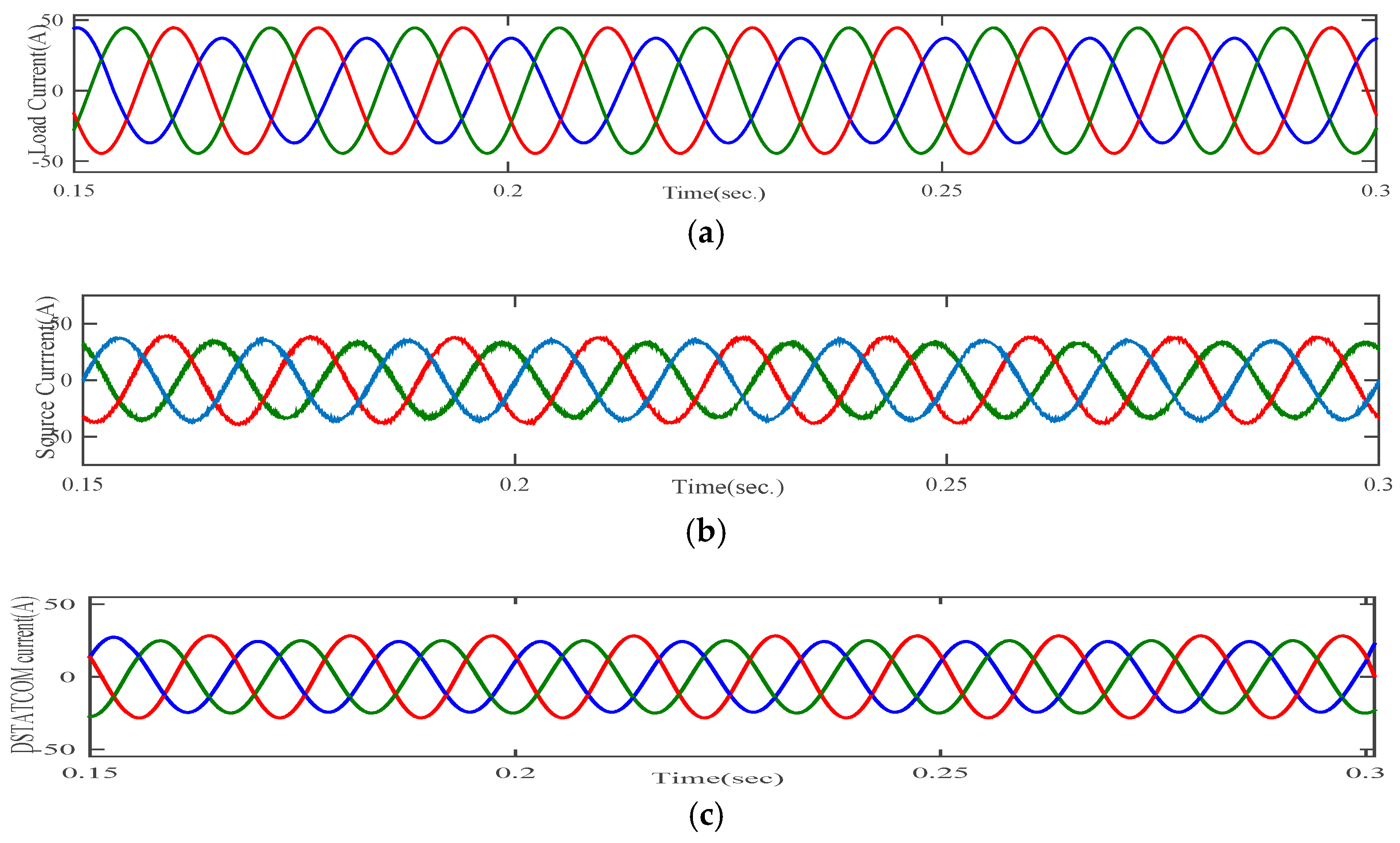
5.1.1. Linear Load Condition
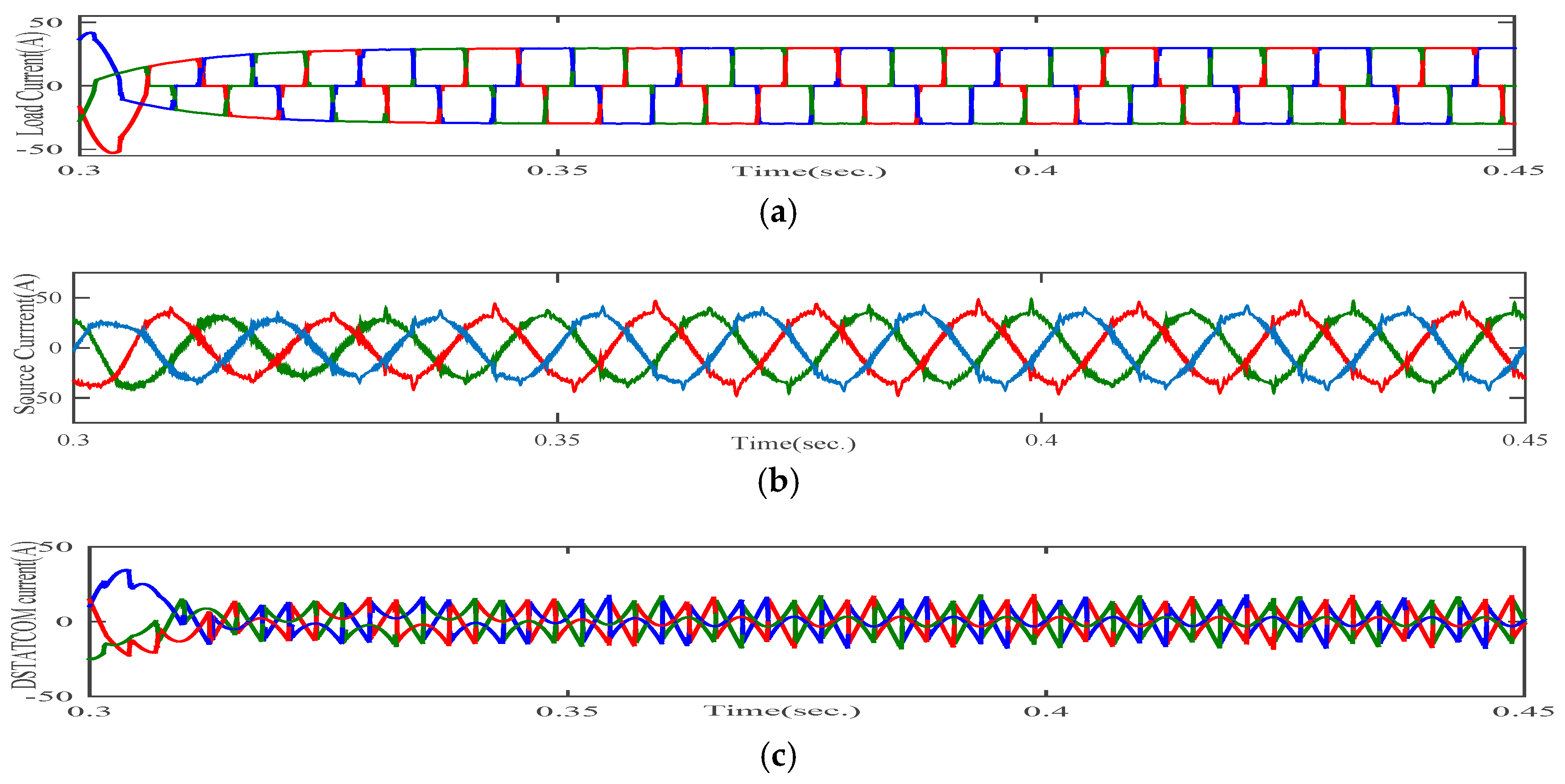
5.1.2. Non-Linear Load Condition
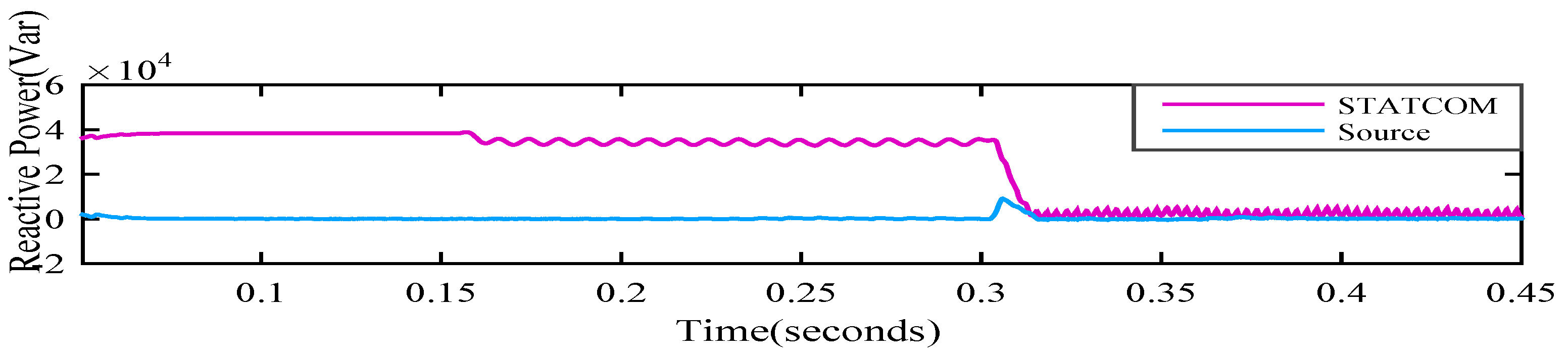
5.2. Power Quality Analysis
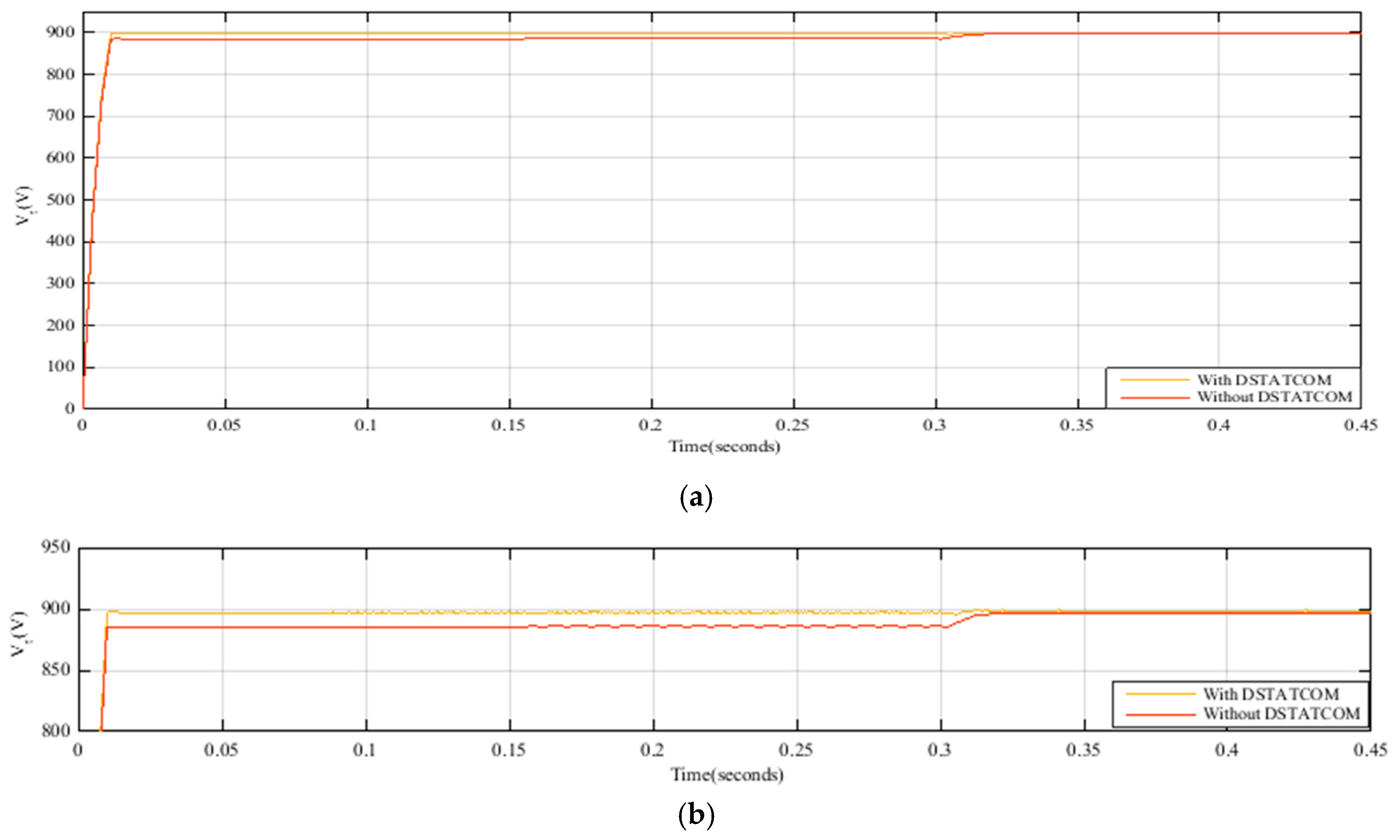
5.2.1. Voltage Disturbance
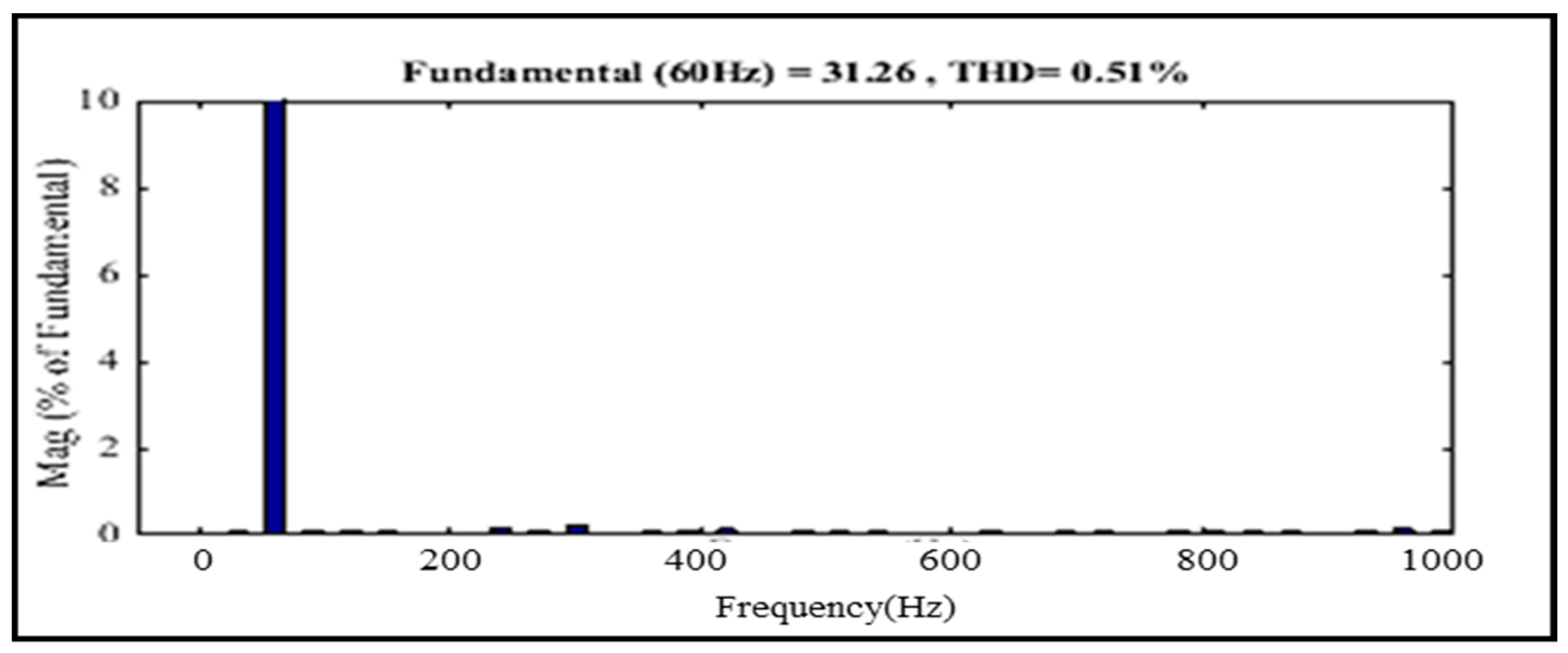
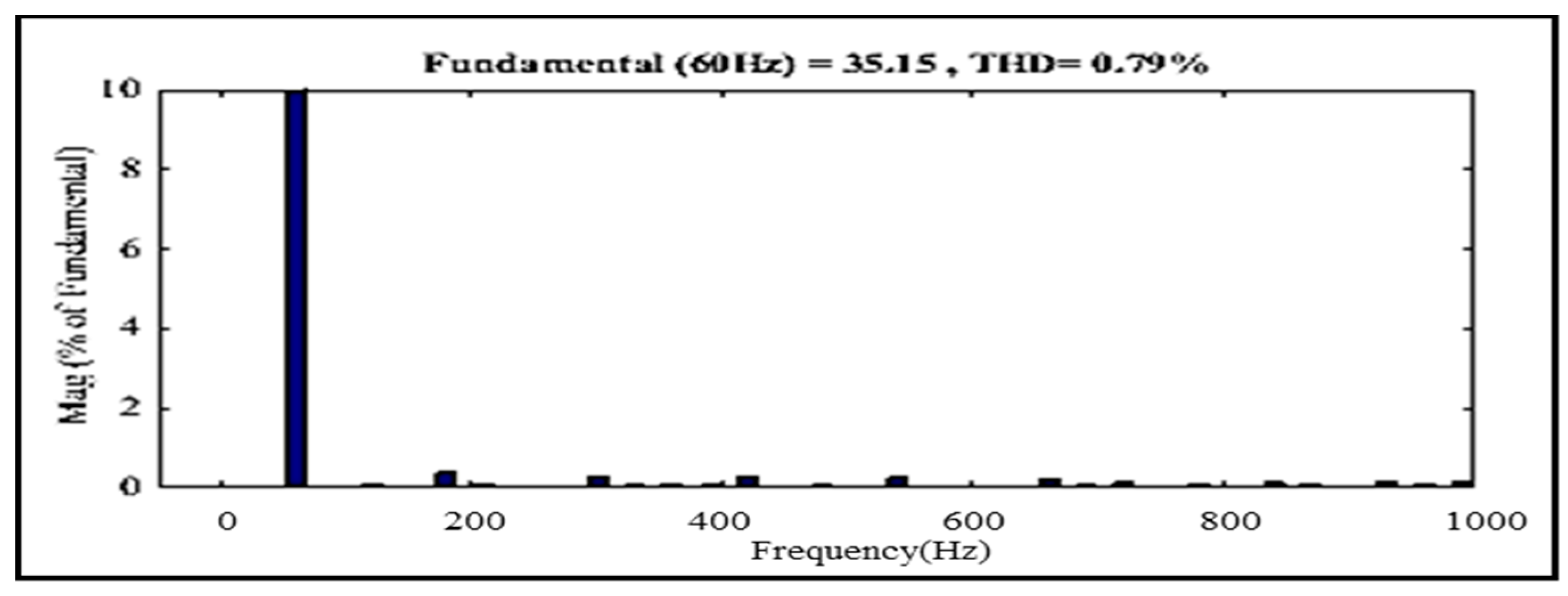
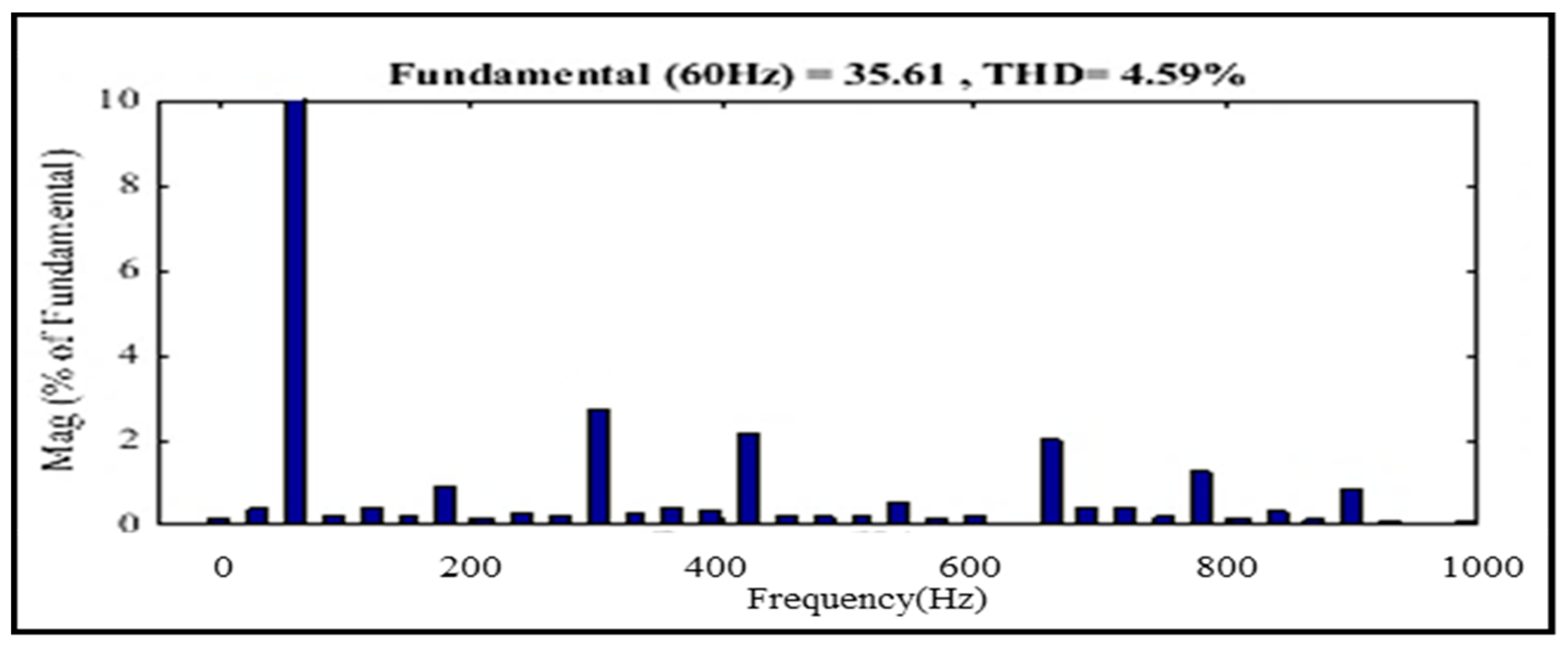
5.2.2. Fast Fourier Transform Analysis of Source Current under Various Load Conditions
5.3. Effect of System Parameters
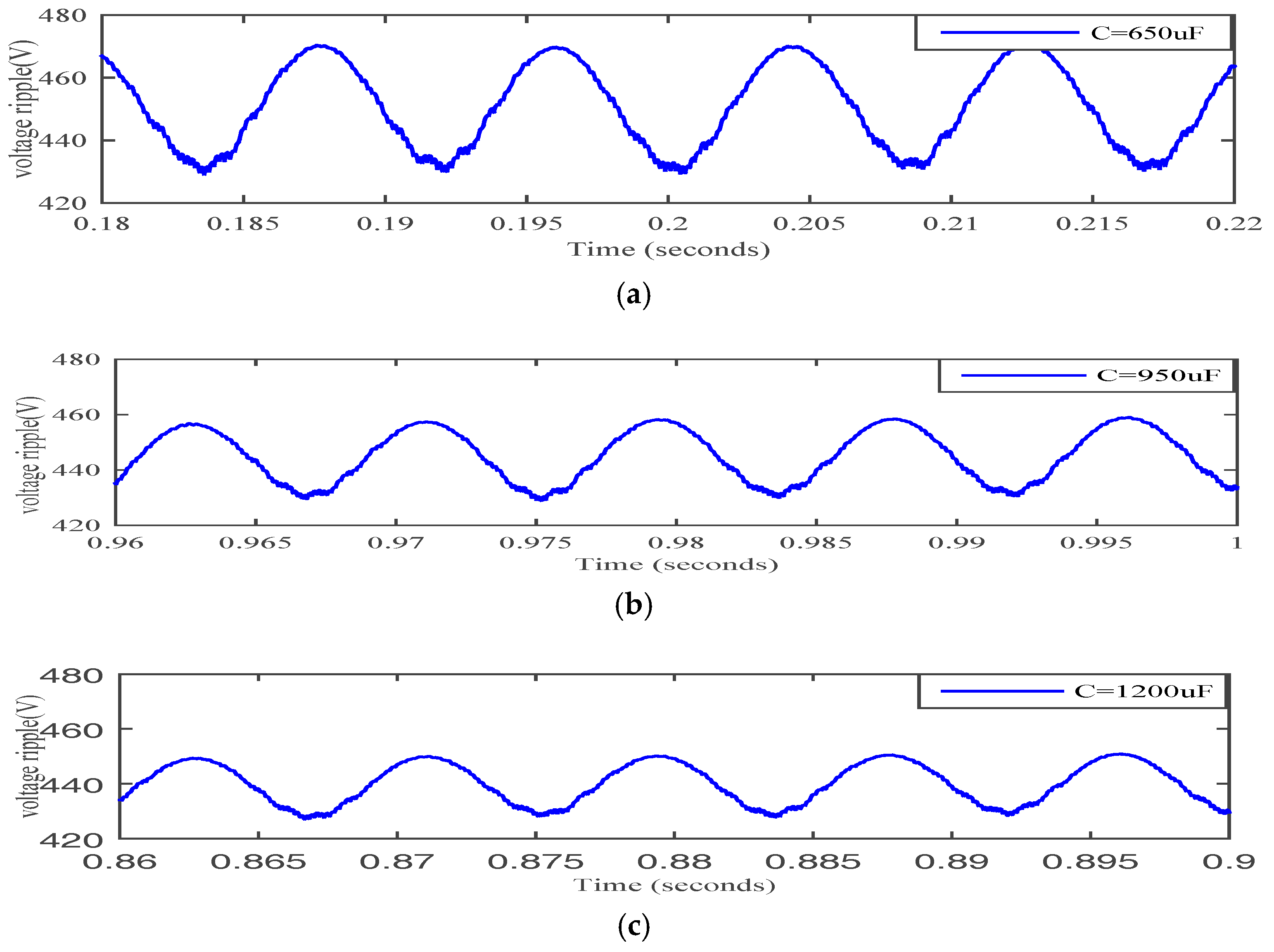
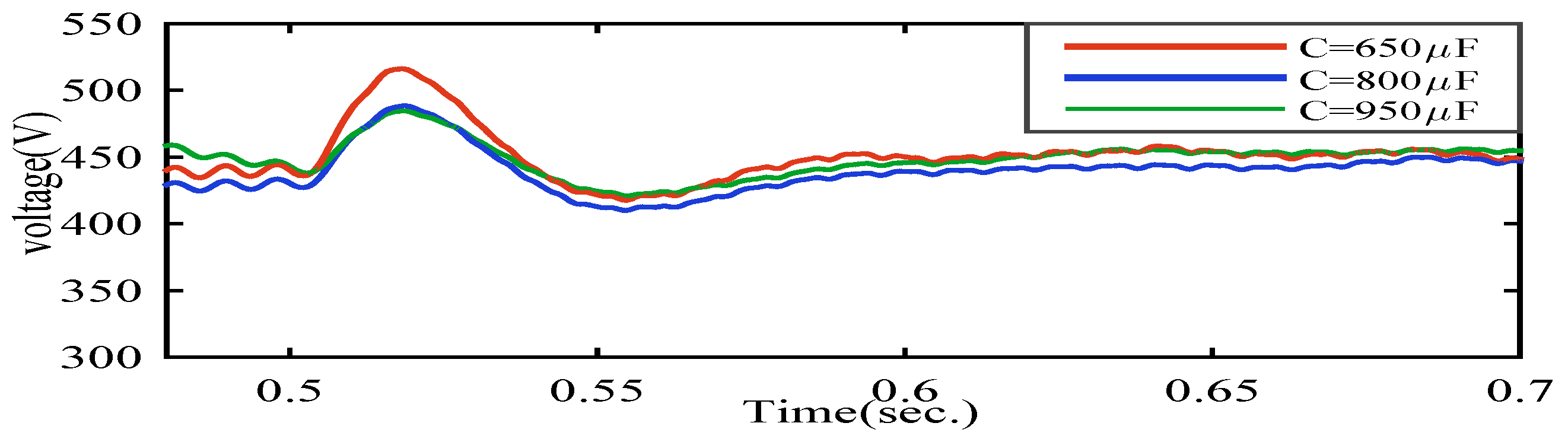
5.3.1. DC Link Capacitor
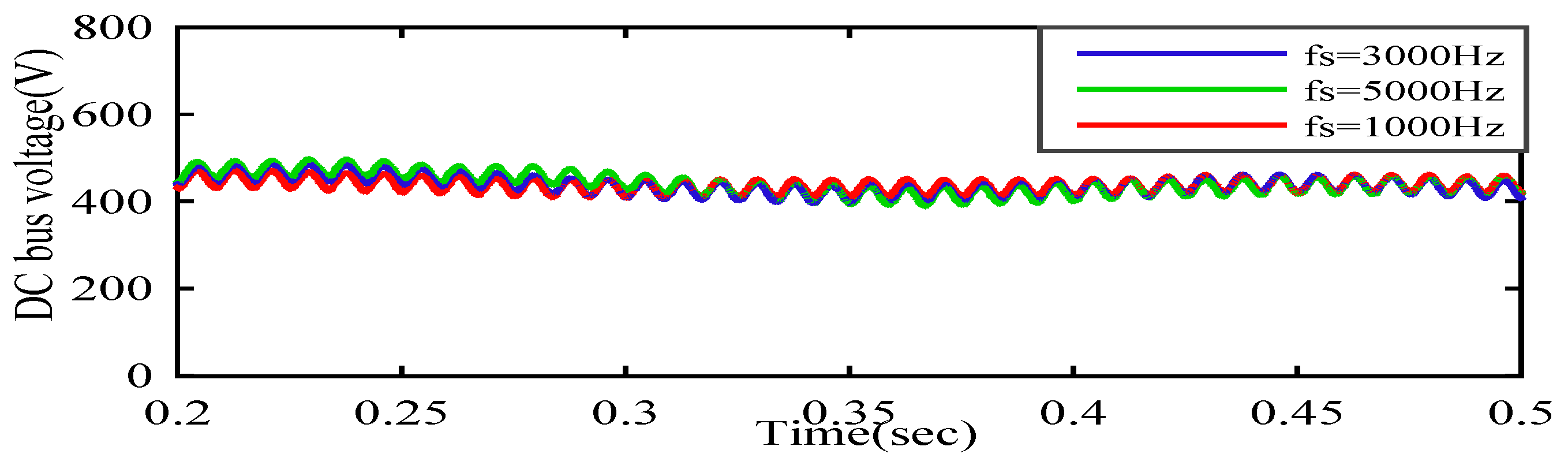
5.3.2. Switching Frequency
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ghosh, A.; Ledwich, G. Power Quality Enhancement Using Custom Power Devices; Springer Science & Business Media LLC: Berlin, Germany, 2002. [Google Scholar]
- Zeng, Z.; Li, H.; Tang, S.; Yang, H.; Zhao, R. Multi-objective control of multi-functional grid-connected inverter for renewable energy integration and power quality service. IET Power Electron. 2016, 9, 761–770. [Google Scholar] [CrossRef]
- Dai, N.Y.; Lao, K.W.; Wong, M.C.; Wong, C.K. Hybrid Power quality conditioner for co-phase power supply system in electrified railway. IET Power Electron. 2012, 5, 1084–1094. [Google Scholar] [CrossRef]
- Ise, T.; Hayashi, Y.; Tsuji, K. Definition of power quality levels and simplest approach for unbalanced power quality. In Proceedings of the Ninth International Conference on Harmonics and Quality of Power, Orlando, FL, USA, 1–10 October 2000; Volume 2, pp. 385–390.
- Kushare, G.A.A.; Kala, S. Development of web based power quality monitoring system for handling user custom power quality query and auto power quality monitoring report notification via email. In Proceedings of the IET-UK International Conference on Information and Communication Technology in Electrical Sciences (ICTES 2007), Chennai, Indian, 20–22 December 2007; pp. 1–7.
- Qader, M.R. A novel strategic-control-based distribution static synchronous series compensator (DSSSC) for power quality improvement. Int. J. Electr. Power Energy Syst. 2015, 64, 1106–1118. [Google Scholar] [CrossRef]
- Zhou, G.; Wu, B.; Xu, D. Direct power control of multilevel inverter based active power filter. Electr. Power Syst. Res. 2007, 77, 284–294. [Google Scholar] [CrossRef]
- Iyer, S.; Ghosh, A.; Joshi, A. Inverter topologies for DSTATCOM application-asimulation study. Electr. Power Syst. Res. 2005, 75, 161–170. [Google Scholar] [CrossRef]
- Grady, W.M.; Samotyj, M.J.; Noyola, A.H. Survey of active power line conditioning methodologies. IEEE Trans. Power Delivery 1990, 5, 1536–1542. [Google Scholar] [CrossRef]
- Balikci, A.; Akpinar, E. A multilevel converter with reduced number of switches in STATCOM for load balancing. Electr. Power Syst. Res. 2015, 123, 164–173. [Google Scholar] [CrossRef]
- Li, S.; Xu, L.; Haskew, T.A. Control of VSC-based STATCOM using conventional and direct-current vector control strategies. Electr. Power Energy Syst. 2013, 45, 175–186. [Google Scholar] [CrossRef]
- Dike, D.O.; Mahajan, S.M. Voltage stability index-based reactive power compensation scheme. Int. J. Electr. Power Energy Syst. 2015, 73, 734–742. [Google Scholar] [CrossRef]
- Gupta, V.K.; Mahanty, R. Optimized switching scheme of cascaded H-bridge multilevel inverter using PSO. Int. J. Electr. Power Energy Syst. 2015, 64, 699–707. [Google Scholar] [CrossRef]
- Rao, G.N.; Raju, P.S.; Sekhar, K.C. Harmonic elimination of Cascaded H-bridge multilevel inverter based active power filter controlled by intelligent techniques. Int. J. Electr. Power Energy Syst. 2013, 61, 56–63. [Google Scholar]
- Gupta, R.; Ghosh, A.; Joshi, A. Control of cascaded transformer multilevel inverter based DSTATCOM. Electr. Power Syst. Res. 2007, 77, 989–999. [Google Scholar] [CrossRef]
- Panda, A.K.; Patnaik, S.S. Analysis of cascaded multilevel inverters for active harmonic filtering in distribution networks. Int. J. Electr. Power Energy Syst. 2015, 66, 216–226. [Google Scholar] [CrossRef]
- Bradaschia, F.; Limongi, L.R.; Cavalcanti, M.C.; Neves, F.A.S. A generalized scaler pulse-width modulation for nine-switch inverters: An approach for non-sinusoidal modulating waveform. Electr. Power Syst. Res. 2015, 212, 302–312. [Google Scholar] [CrossRef]
- Akagi, H.; Watanabe, E.H.; Aredes, M. Instantaneous Power Theory and Applications to Power Conditioning; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2007. [Google Scholar]
- Tripathi, R.N.; Singh, A. Design and control of grid interconnected solar photovoltaic (SPV) System with improvement in power quality. In Proceedings of the IEEE 5th International Conference on Power and Energy Systems (Advances in Power System), Kathmandu, Nepal, 28–30 October 2013.
- Zafari, A.; Jazaeri, M. STATCOM systems in distribution and transmission systems: A review of power-stage topoloies and control methods. Int. Trans. Electr. Energy Syst. 2016, 26, 323–346. [Google Scholar] [CrossRef]
- Lee, T.L.; Taiwan, K.; Hu, S.-H.; Chan, Y.H. D-STATCOM with positive-sequence admittance and negative-sequence conductance to mitigate voltage fluctuations in high-level penetration of distributed-generation systems. IEEE Trans. Ind. Electron. 2013, 60, 1417–1428. [Google Scholar] [CrossRef]
- Chellammal, N.; Dash, S.S.; Premalatha, S.; Rayaguru, N.K. Three phase Multicurrier PWM Switched Cascaded Multilevel Inverter as Voltage Sag Compensator. AASRI Procedia 2012, 2, 282–287. [Google Scholar] [CrossRef]
- Young, C.M.; Wu, S.F. Selective harmonic elilmination in multi-level inverter with zig-zag connection transformers. IET Power Electron. 2014, 7, 876–885. [Google Scholar] [CrossRef]
- Pandey, R.; Tripathi, R.N.; Hanamoto, T. Multiband HCC for cascaded H-bridge multilevel inverter based DSTATCOM. In Proceedings of the 2016 IEEE 11th Conference on Industrial Electronics and Applications (ICIEA), Hefei, China, 5–7 June 2016.
- Zhao, G.; Liu, J.; Han, M. Design of input filters considering the stability of STATCOM system. J. Power Electron. 2011, 11, 904–913. [Google Scholar] [CrossRef]
- Vodyakho, O.; Chris, C.M. Three level inverter based shunt active power filter in phase three-wire and four wire systems. IEEE Trans. Power Electron. 2009, 24, 1350–1363. [Google Scholar] [CrossRef]
- Shin, D.; Kim, H.; Lee, J.; Kim, T. Design of LCL filter for improving robustness of grid-connected voltage source inverter. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 2940–2946.
- Sirisukprasert, S. The Modelling and Control of a Cascaded-Multilevel Converter—Based STATCOM. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 13 February 2004. [Google Scholar]
- Tripathi, R.N.; Singh, A.; Hanamoto, T. Design and control of LCL filter interfaced grid connected solar photovoltaic (SPV) System using power balance theory. Int. J. Electr. Power Energy Syst. 2015, 69, 264–274. [Google Scholar] [CrossRef]
- Zue, A.O.; Chandra, A. Simulation and staibility analysis of a 100 KW grid connected LCL photovoltaic inverter for industry. In Proceedings of the 2006 IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006.
- Teodorescu, R.; Blaabjerg, F.; Borup, U.; Liserre, M. New control structure for grid-connected LCL PV inverters with zero steady-state error and selective harmonic compensation. In Proceedings of the Nineteenth annual Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, 22–26 February 2004; Volume 1, pp. 580–586.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S. No. | Simulation Parameter | Values |
|---|---|---|
| 1. | Source voltage | 1100 V |
| 2. | Frequency | 60 Hz. |
| 3. | Sources reactance | 0.01 Ω and 1.6 mH |
| 4. | LCL Filter Parameter | Lg = 1.6 mH, Ls = 1.6 mH, Cf = 80 µF, Rd = 0.5 Ω |
| 5. | DC link voltage per cell | 450 V |
| 6. | Kp, Ki | 1.2 × 10−3, 7 × 10−4 |
| 7. | Capacitor | 800 µF |
| 8. | Switching Frequency | 1000–5000 Hz |
| 9. | Linear Load | 65 KVA 0.8 PF lagging |
| 10. | Non Linear Load | Rectifier load R = 50 Ω, L = 500 mH |
| 11. | Unbalanced load | In phase C 10 KVA |
| S. No. | Switching Frequency (Hz) | Source Current (THD %) |
|---|---|---|
| 1. | 1000 | 0.62 |
| 2. | 2000 | 0.58 |
| 3. | 3000 | 0.53 |
| 4. | 4000 | 0.48 |
| 5. | 5000 | 0.43 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pandey, R.; Tripathi, R.N.; Hanamoto, T. Comprehensive Analysis of LCL Filter Interfaced Cascaded H-Bridge Multilevel Inverter-Based DSTATCOM. Energies 2017, 10, 346. https://doi.org/10.3390/en10030346
Pandey R, Tripathi RN, Hanamoto T. Comprehensive Analysis of LCL Filter Interfaced Cascaded H-Bridge Multilevel Inverter-Based DSTATCOM. Energies. 2017; 10(3):346. https://doi.org/10.3390/en10030346
Chicago/Turabian StylePandey, Ravikant, Ravi Nath Tripathi, and Tsuyoshi Hanamoto. 2017. "Comprehensive Analysis of LCL Filter Interfaced Cascaded H-Bridge Multilevel Inverter-Based DSTATCOM" Energies 10, no. 3: 346. https://doi.org/10.3390/en10030346
APA StylePandey, R., Tripathi, R. N., & Hanamoto, T. (2017). Comprehensive Analysis of LCL Filter Interfaced Cascaded H-Bridge Multilevel Inverter-Based DSTATCOM. Energies, 10(3), 346. https://doi.org/10.3390/en10030346