Different variables from diverse test cases and electrical generators are studied in the present paper. Hence, for the different error measures to be comparable, an error measure that is suitable for all of the variables is required. Normalised measures facilitate the comparison of diverse datasets with different scales, which is necessary in this case. Unfortunately, the popular mean average percentage error (MAPE) metric cannot be employed, since there are values in the datasets that are zero or close to zero, which would imply a division by zero. The normalised root mean square error (NRMSE) could be a suitable candidate. However, because variables vary from zero to the nominal value in some test cases, using a single average value of the whole simulation for the normalisation can bias the error measure. Therefore, the validation is evaluated by means of an alternative normalized root mean square error, known as the moving average normalised root mean square error (MANRMSE), given in Equation (
23). Hence, signals are divided into
N parts, using a different average value in each part
j to normalise the error. The bias of the error measure decreases as
N increases, since the average value corresponding to each
j part is more representative of the signal values in that
j part. However, there is a value of
N, after which increasing Ndoes not affect the error measure. That value of
N ensures an unbiased error measure, without losing the characteristics of the signals. In the present paper, the error measure was observed to be constant when the signals were divided into more than 40 parts, so
was chosen to obtain the fidelity values.
where
y is the measured value,
the value given by the model,
the average value at each part
j and
n the number of samples in each part. Once the MANRMSEis calculated, the fidelity of the variables from the mathematical model in percentage terms can be obtained as follows,
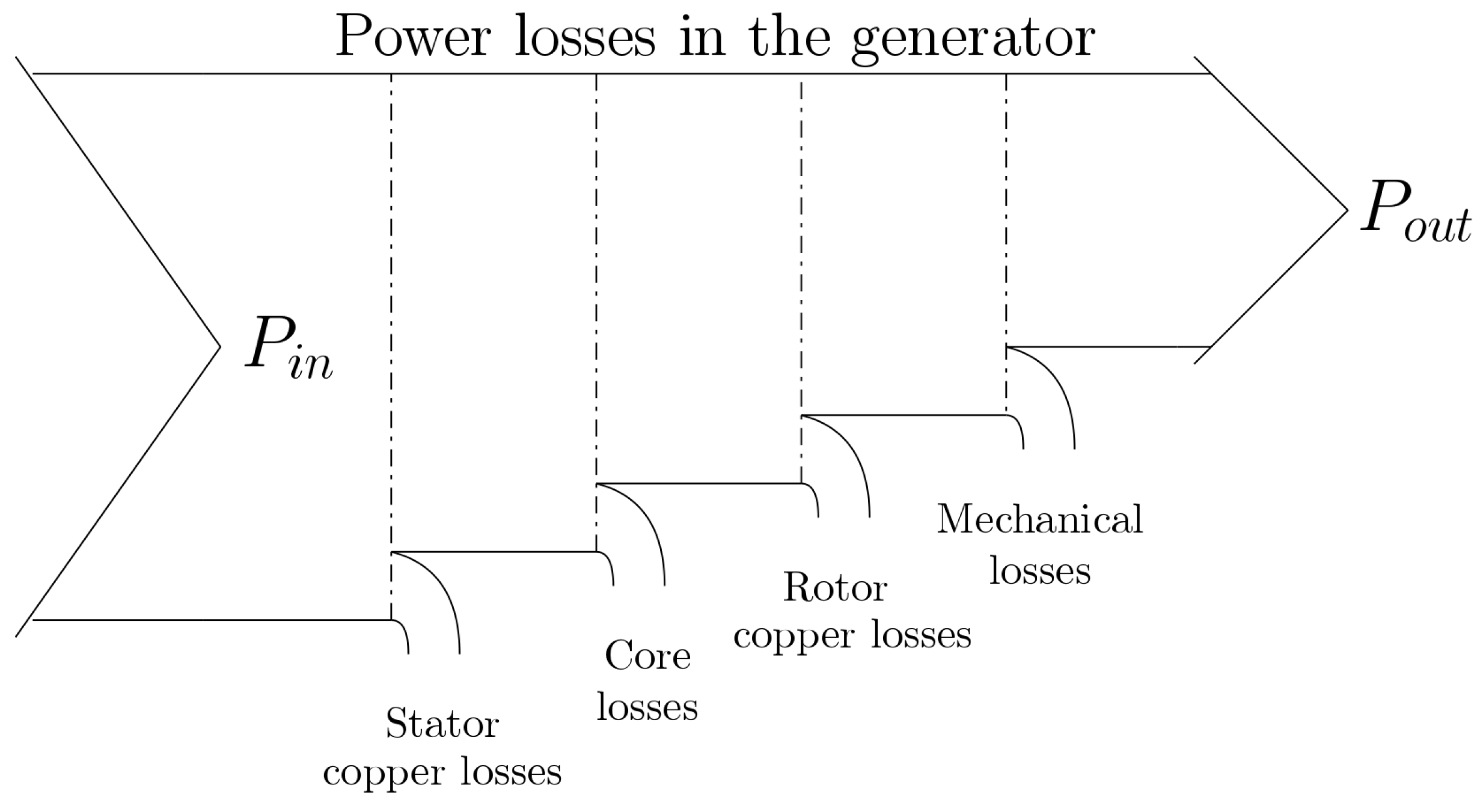
5.1. Electrical Generator Validation
Fidelity values shown in
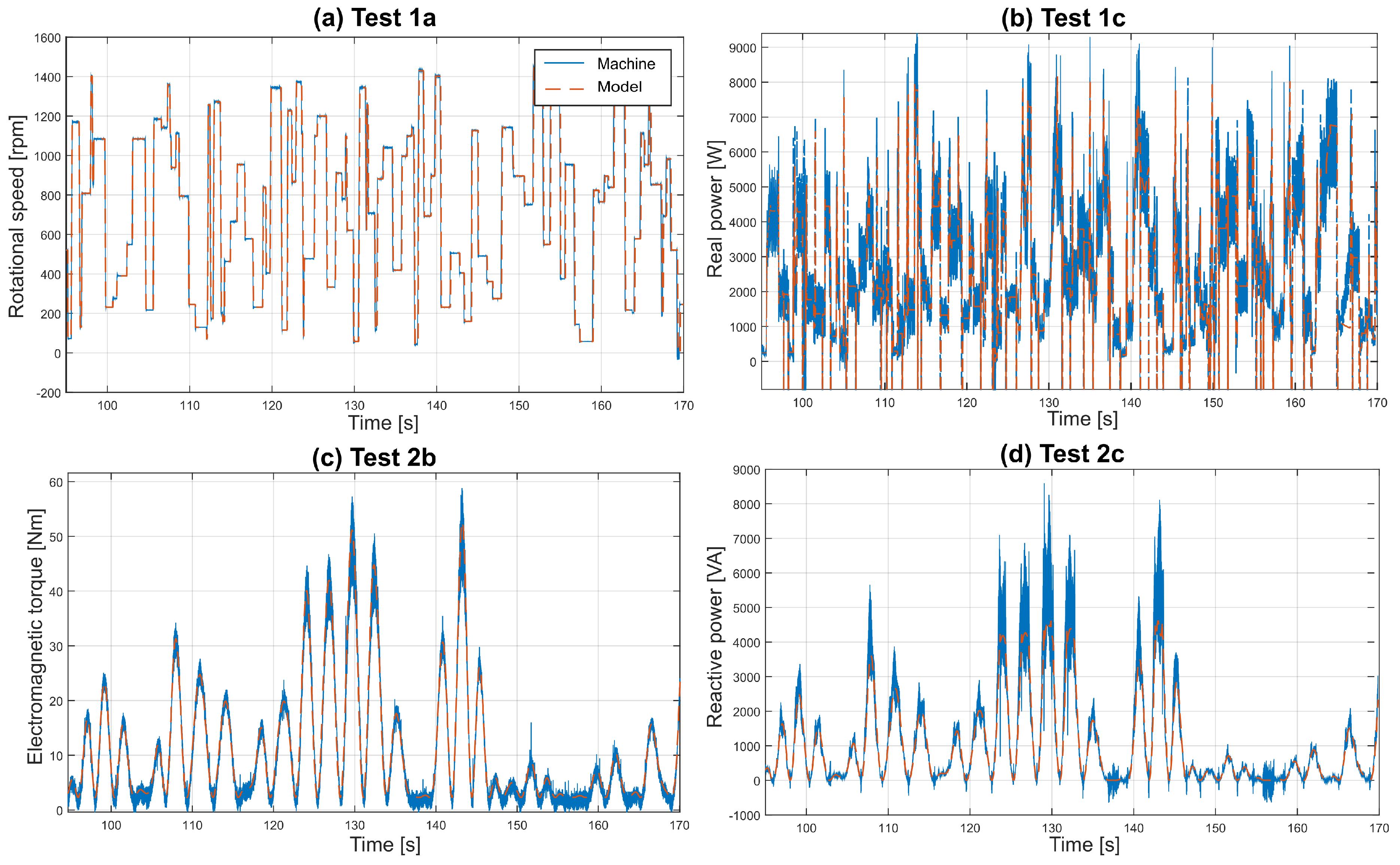
Table 1 for the SCIG show a good overall agreement between the machine and the mathematical model, where fidelity values above 90% are shown for most of the test cases and variables. Results from the mathematical models, considering all of the variables and test cases, show the ability to reproduce the behaviour of the real machine, as illustrated in
Figure 12 for the rotational speed, electromagnetic torque and active and reactive power.
The chaotic behaviour of the real power in
Figure 12b corresponds to the abrupt variations of the inputs signals of the test case Test 1c, as shown in
Figure 10. Due to these abrupt variations, the generator rapidly varies from operating close to full-load conditions to part-load condition, or vice versa. As a consequence, high power spikes appear, which can lead to high negative power values when the generator requires sucking power from the grid to reach the new operating conditions. However, the measurements of the real machines show considerable high-frequency fluctuations, as illustrated in
Figure 12, which reduce the fidelity of the mathematical models for the electric generators. In fact, one can observe, from
Figure 12, that such fluctuations are the main difference between the experimental results and the results obtained from the mathematical models.
High-frequency fluctuations appear in all of the test cases and variables, except for the rotational speed, as shown in
Figure 12, because the inertia of the rotor shaft smooths out the rotational speed signal. The source of these high-frequency fluctuations are likely to be harmonics generated by power converters and the noise of the measurements. Harmonics inserted by power converters include fluctuations of frequency multiplied bythe fundamental frequency, while the noise added by virtue of the sensors includes a random error in the signal [
44].
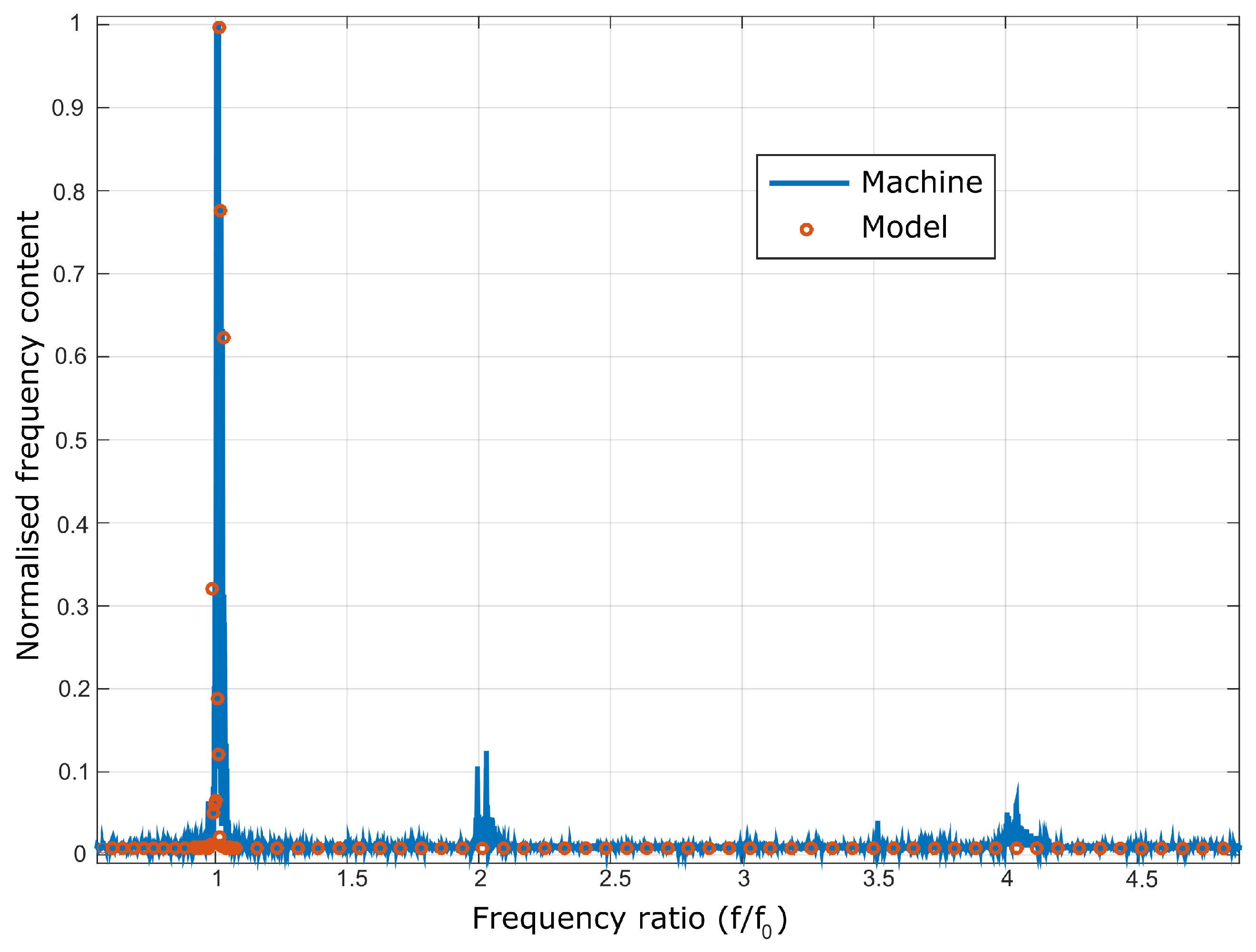
Figure 13 illustrates the frequency content of the stator voltage signal in Test2b, for which the the fundamental frequency is 50 Hz for the whole simulation, because the rotational speed is constant. In addition to the fundamental frequency, one can clearly see the harmonics at twice (
) and four-times the fundamental frequency (
), as well as the noise all over the frequency range in the case of the real machine. The mathematical models described in
Section 2, however, do not incorporate switching operations of the power converters, as explained in
Section 2.3, and as a consequence, results from the mathematical models show no high-frequency fluctuation, as illustrated in
Figure 12. The frequency content associated with the voltage signal of the mathematical model is, indeed, zero far from the fundamental frequency, as shown in
Figure 13.
In the case of the PMSG, the fidelity values shown in
Table 2 also show good agreement between the mathematical model and the machine, with fidelity values over 90% for most of the test cases and variables. Similarly to the SCIG, the test case Test 2a shows the results of lower fidelity values. However, fidelity values, in general, are lower in the PMSG than in the SCIG. These lower fidelity values are associated with stronger high-frequency fluctuations, as illustrated in
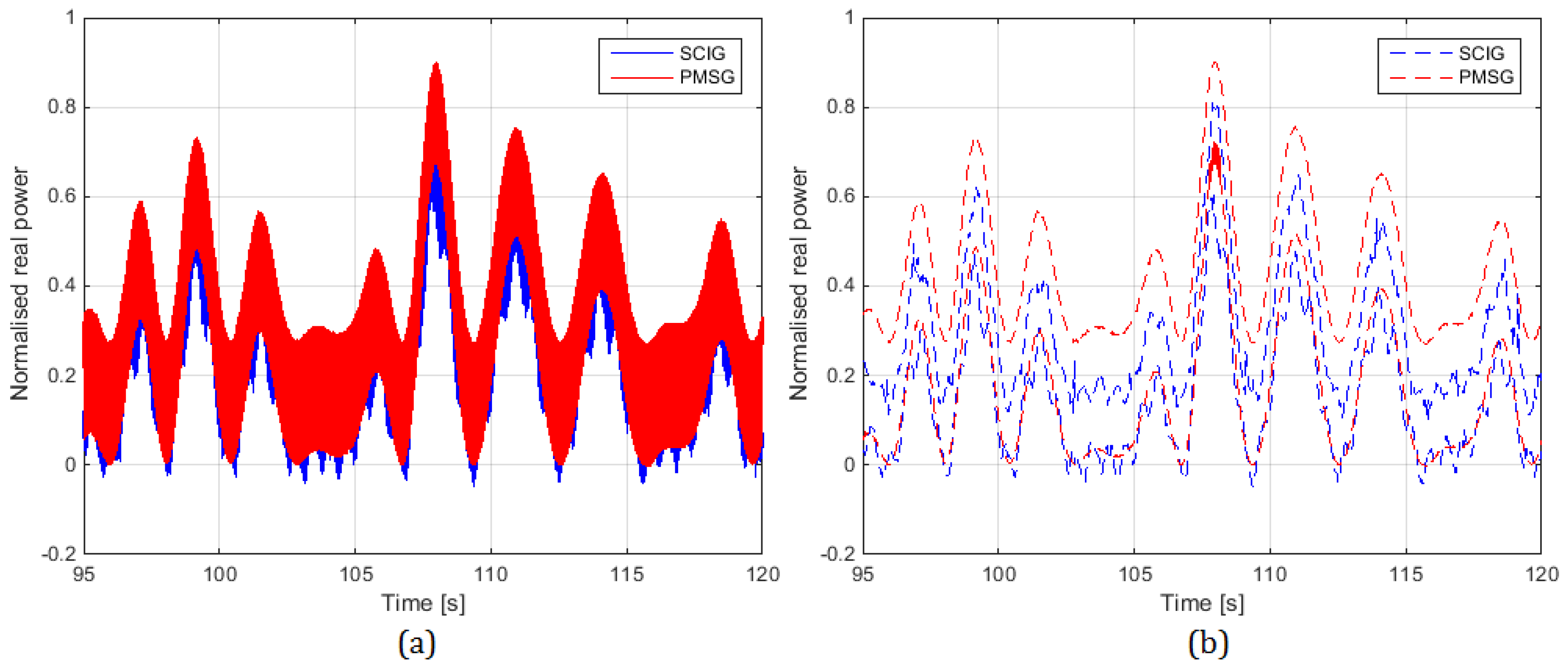
Figure 14, where the level of high-frequency fluctuations is compared for the PMSG and the SCIG.
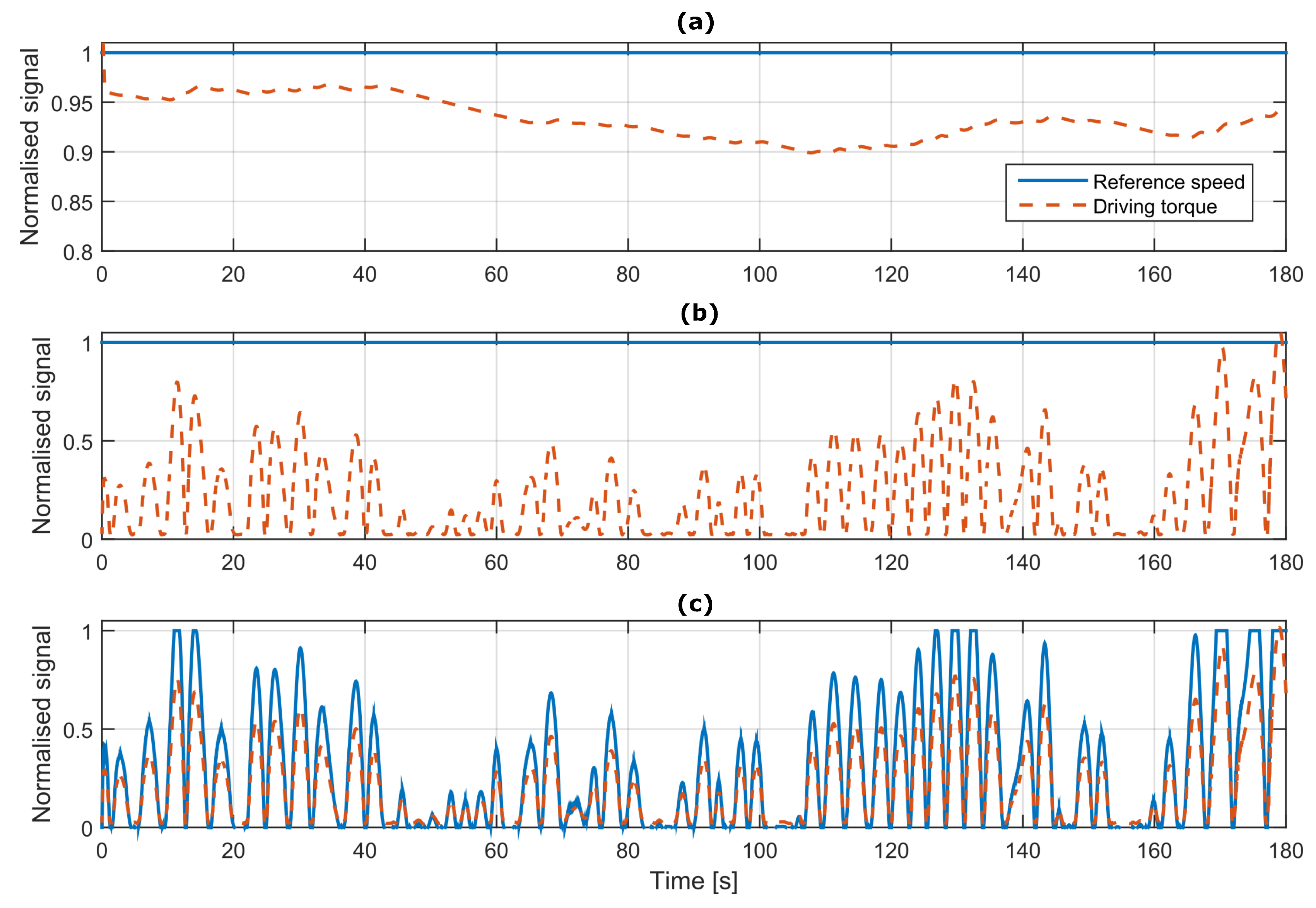
Figure 14a illustrates normalised real power values (normalised against rated power), and
Figure 14b shows the upper and lower envelopes of the normalized real power signals. The lower envelope for the SCIG and the PMSG in
Figure 14b is almost identical, while the upper envelope is considerably higher for the PMSG, which illustrates the larger level of high-frequency fluctuations in the PMSG.
Larger high-frequency fluctuations in the PMSG can also be due to the higher rated rotational speed of the PMSG, which is twice as high as the rated rotational speed of the SCIG. The higher the rotational speed, the higher the frequency, which leads to faster pulses generated by the PWM voltage source converter and, as a consequence, to stronger fluctuations.
Finally, fidelity figures for the DFIG, shown in
Table 3, are similar to those obtained for the SCIG, which shows, once again, good agreement between the mathematical model and the machine. Rated power and rotational speed are identical for the SCIG and the DFIG, confirmed by the similar fidelity values.
Apart from the dynamics of the machines, for which the effectiveness of the mathematical models has been demonstrated, accurately estimating power losses of the generator is crucial. Therefore, the efficiency of the machines is studied, comparing efficiency values obtained from the real machines and the mathematical models in the three generators, for the test case Test 1c.
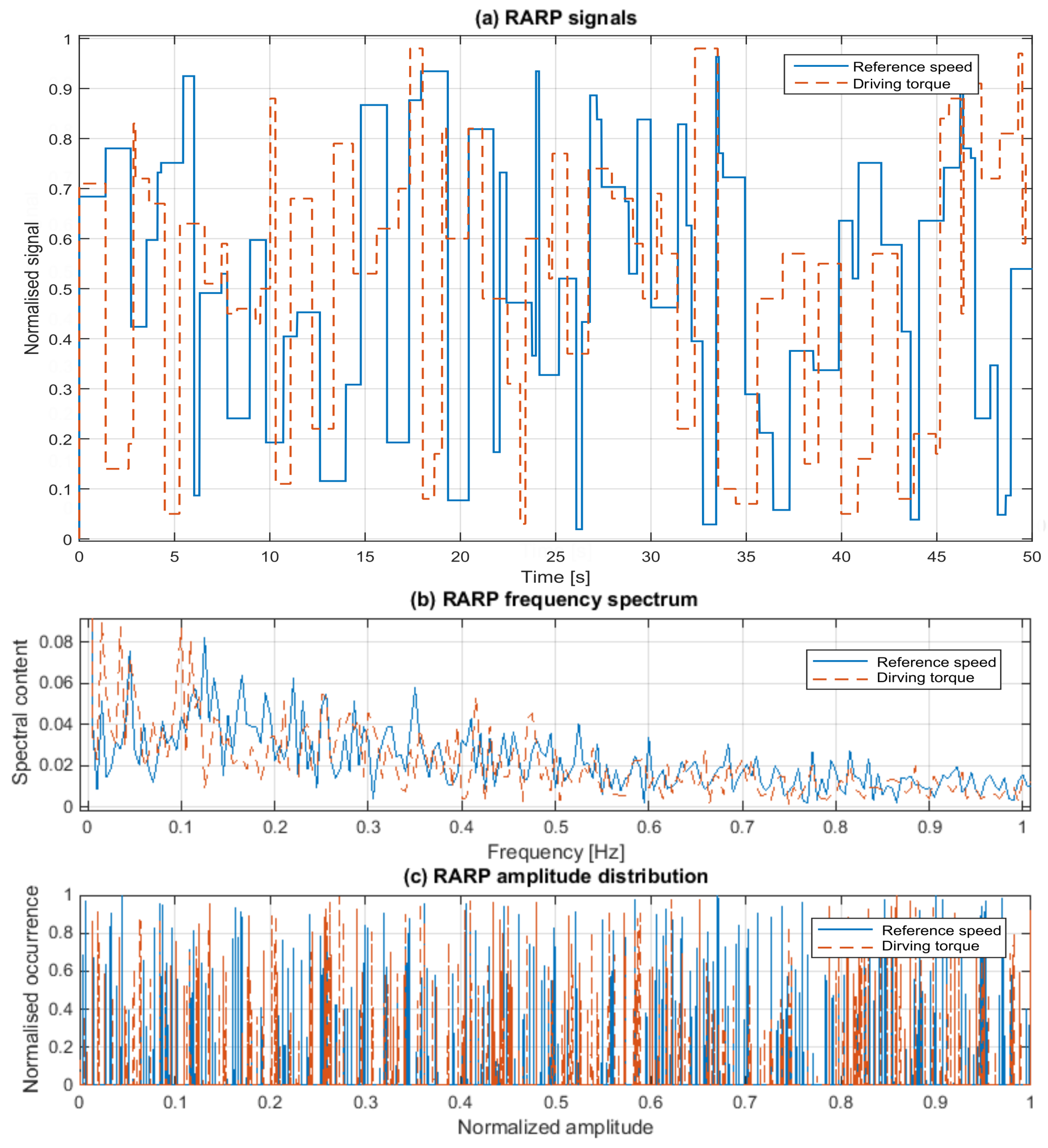
Test 1c is the test case that best covers the whole operational range of the generators, randomly varying rotational speed and driving torque, as shown in
Figure 10. Although such random variations of the rotational speed and driving torque are rather unusual in normal operations, the coverage of the full range of operational conditions makes Test 1c especially suitable for the study of efficiency. However, such random variations include abrupt spikes in the power and efficiency signals. In addition, because speed and torque input signals vary randomly, the electric generators operate at high rotational speed and low torque at some points during the simulation, which results in significant efficiency drops.
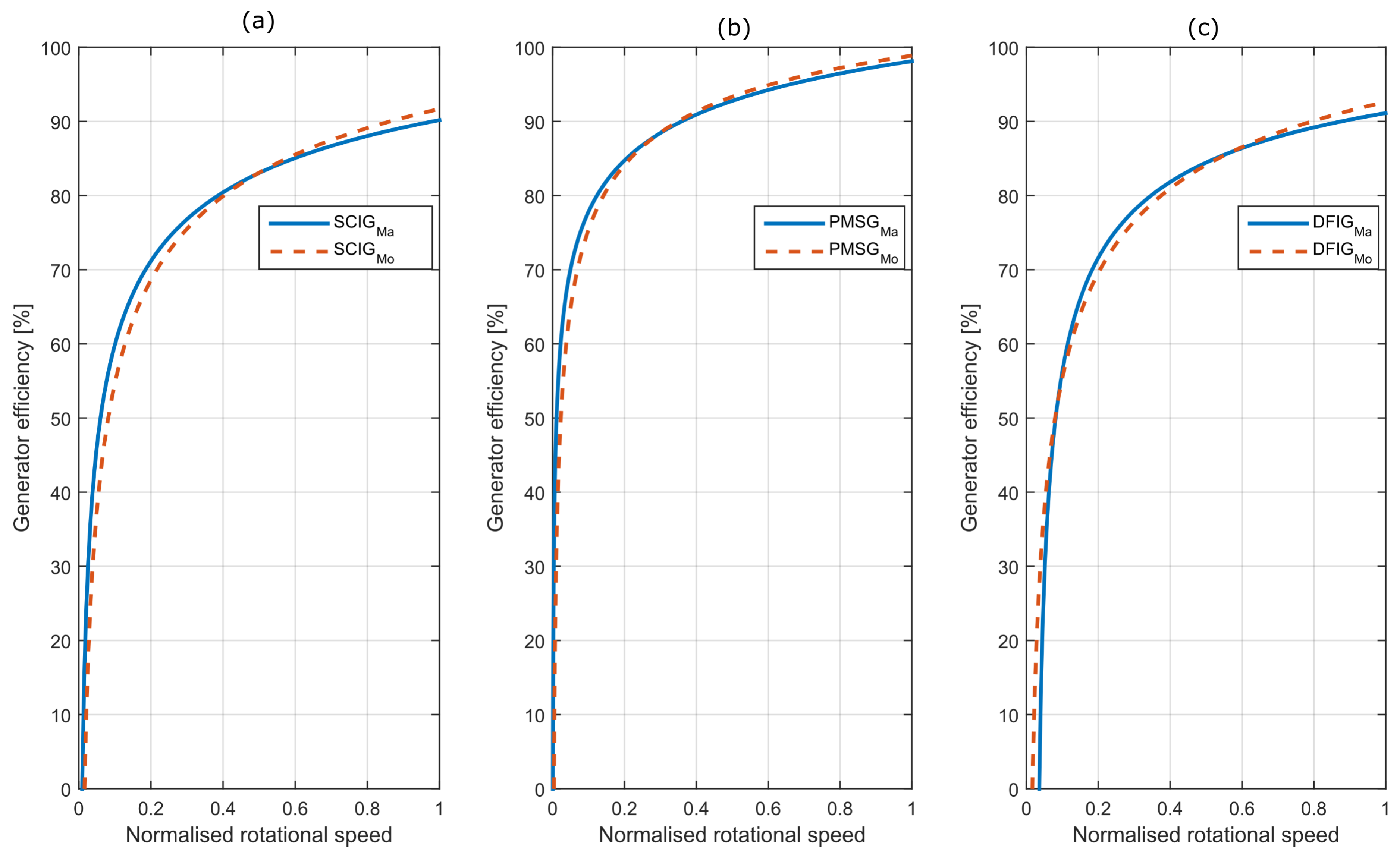
Therefore,
Figure 15a–c illustrate the trend lines of the efficiency signals for the SCIG, PMSG and DFIG, respectively, as a function of the normalised rotational speed, providing satisfactory agreement between the curve of the real machines and the curve of the mathematical models. Efficiency signals are fitted using a power trend line as follows,
where
is the trend line,
,
and
are the coefficients of the power function that are identified to fit the data and
x is the variable on which the trend line is based, i.e., normalised rotational speed in this case. The coefficients of the power function for each generator are given in
Table 4.
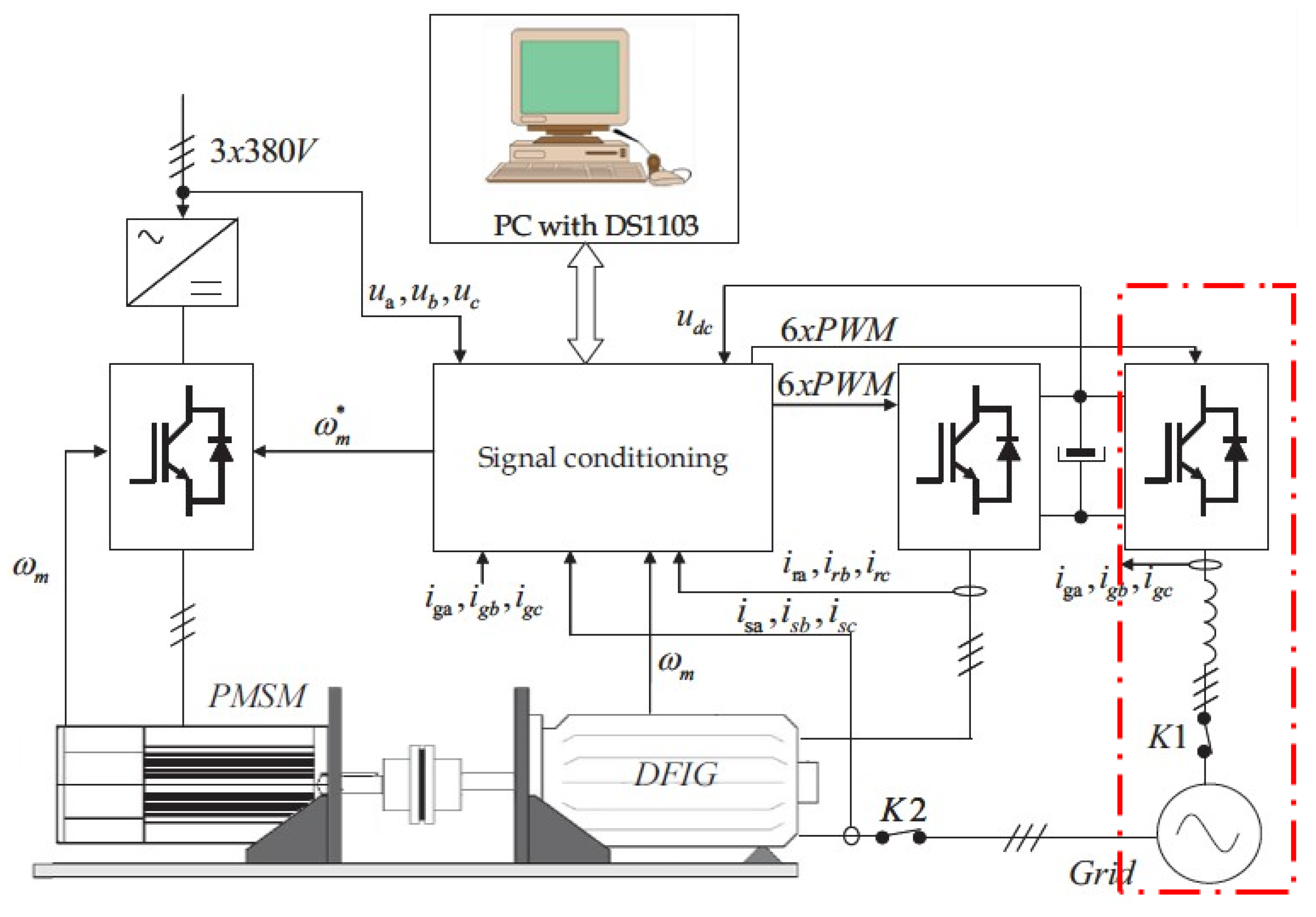
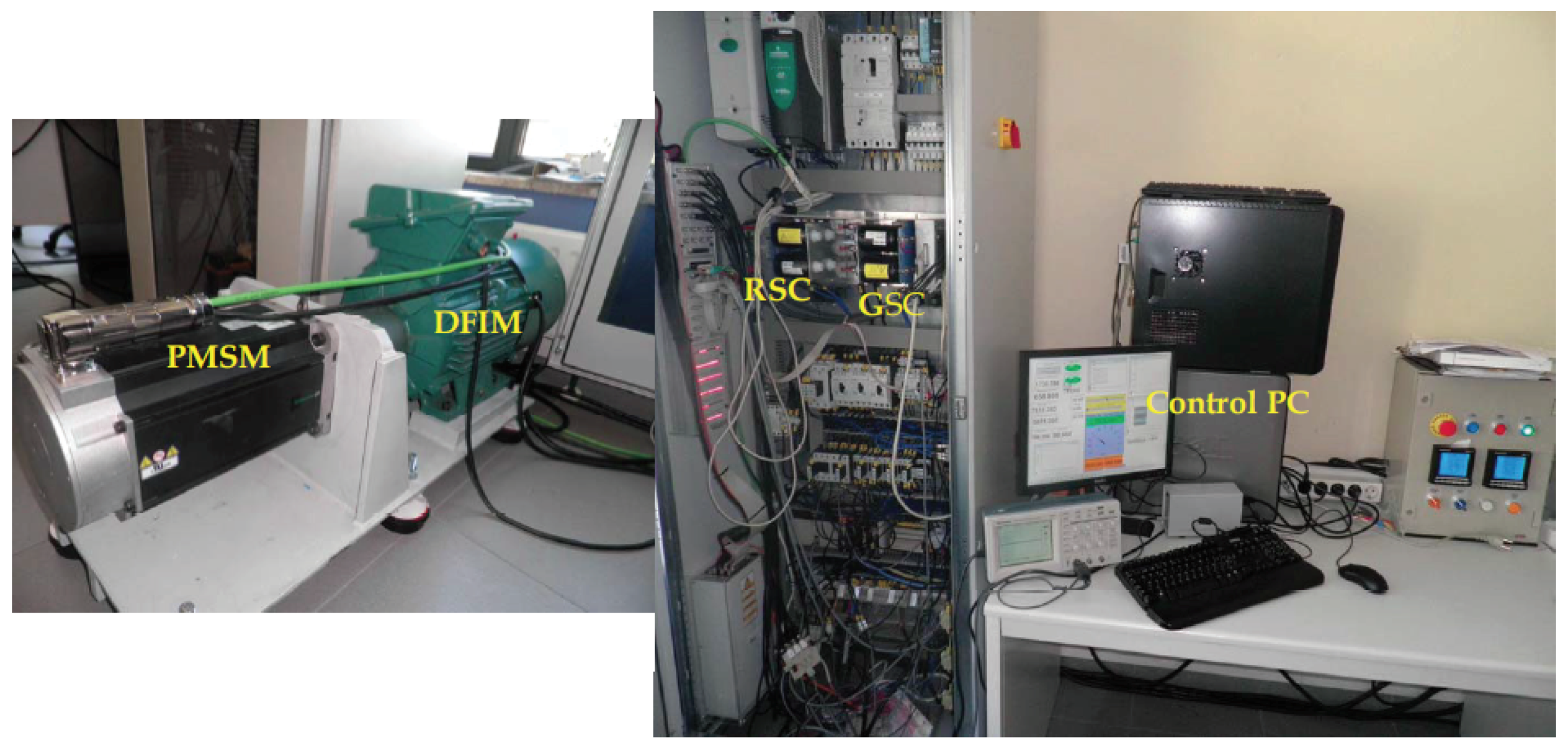
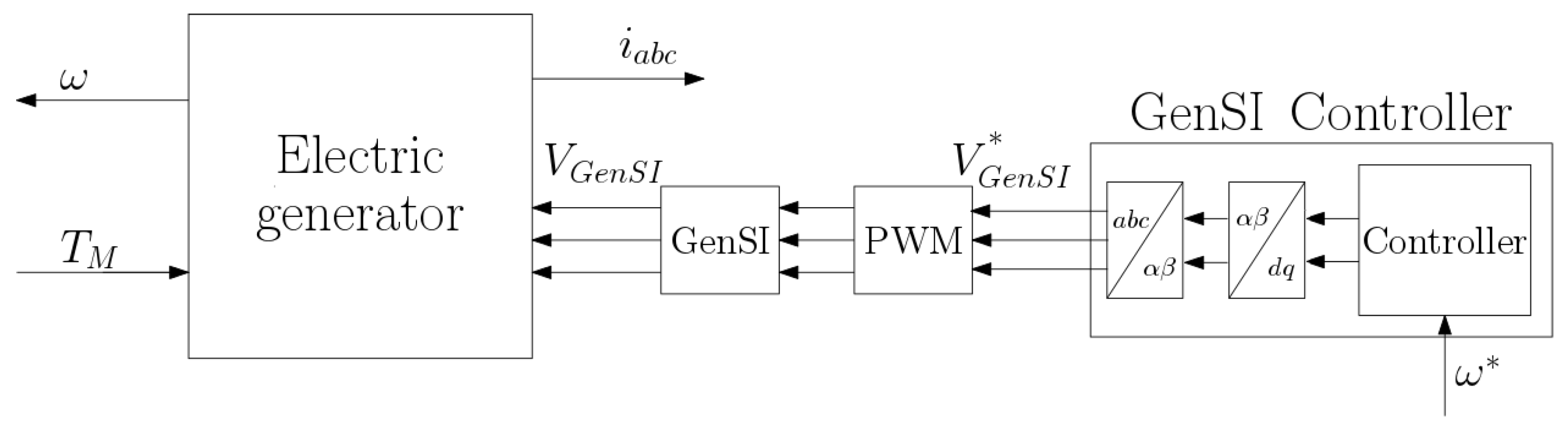
5.2. Power Converter Validation
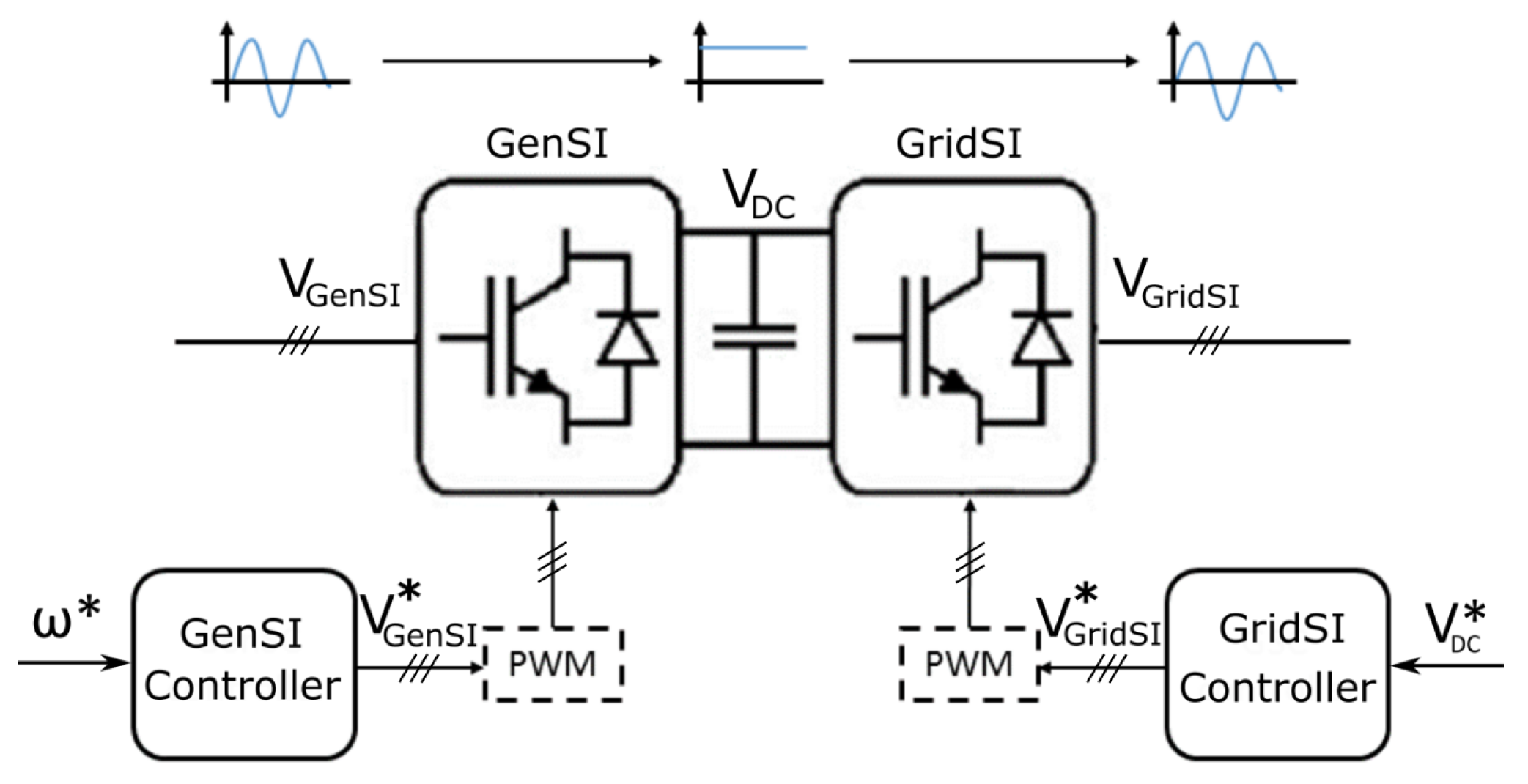
The experiments carried out in the DFIG, since it is grid connected in a B2B configuration, are also used to validate the B2B converter implemented in the mathematical model, as described in
Section 2.3, including power losses in the GenSI and GridSI.
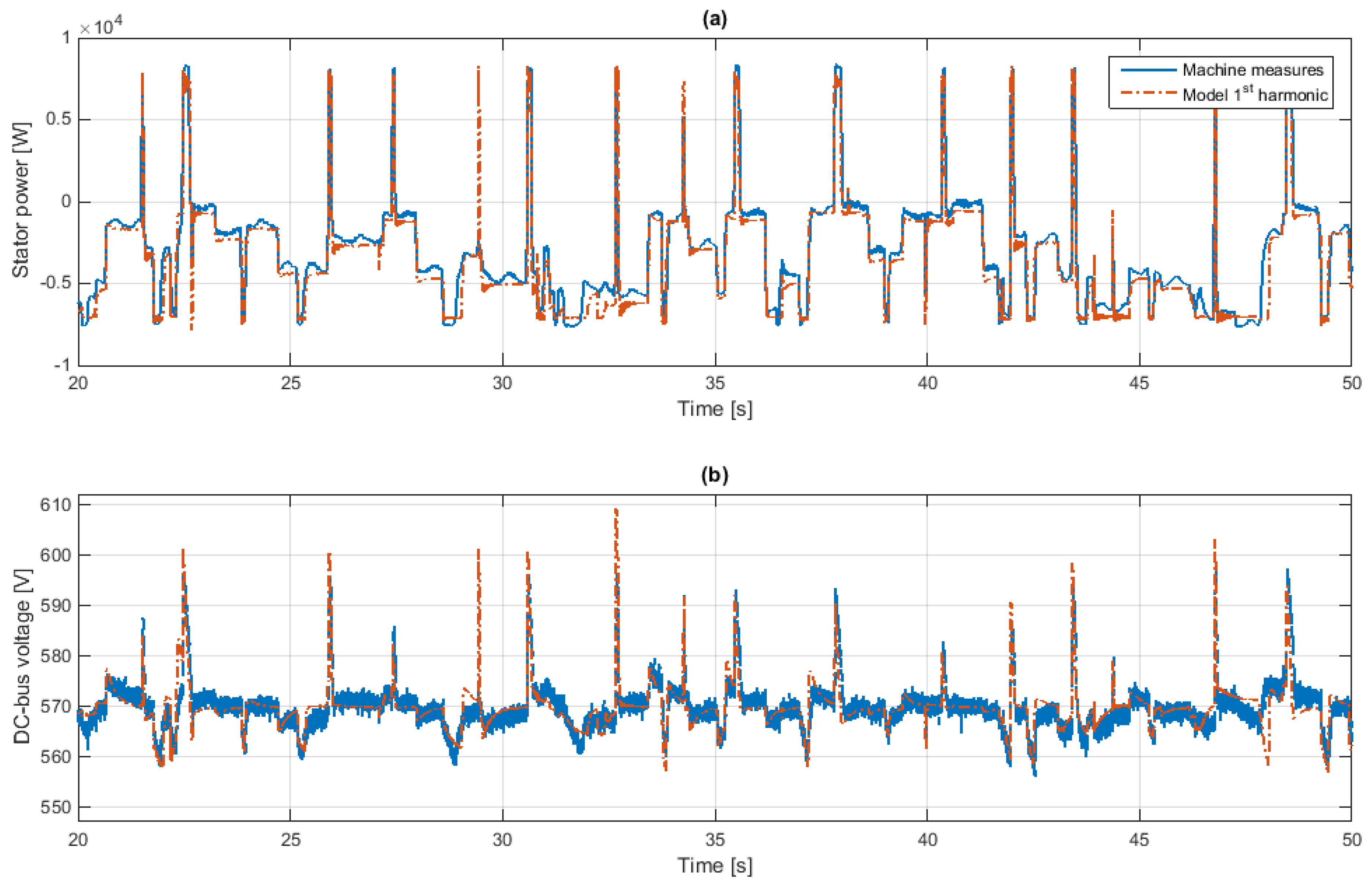
The main objective of the GenSI and GridSI is the control of the electric generator and DC-link voltage, respectively. The ability of the mathematical model to accurately reproduce the effect of the controller in the GenSI is illustrated in
Figure 16a for the DFIG and Test 1c and has been demonstrated in
Section 5.1 for all of the generators and a wide range of operating conditions. Similar results can be obtained in the case of the GridSI, where the control of the DC-link voltage in the mathematical model is almost identical to the DC-link voltage control in the experimental platform.
Fidelity values, obtained by comparing the DC-link voltage values from the experimental platform and the mathematical model, are presented in
Table 5, showing an excellent agreement between the experimental and numerical results.
Figure 16b illustrates that agreement for Test 1c.
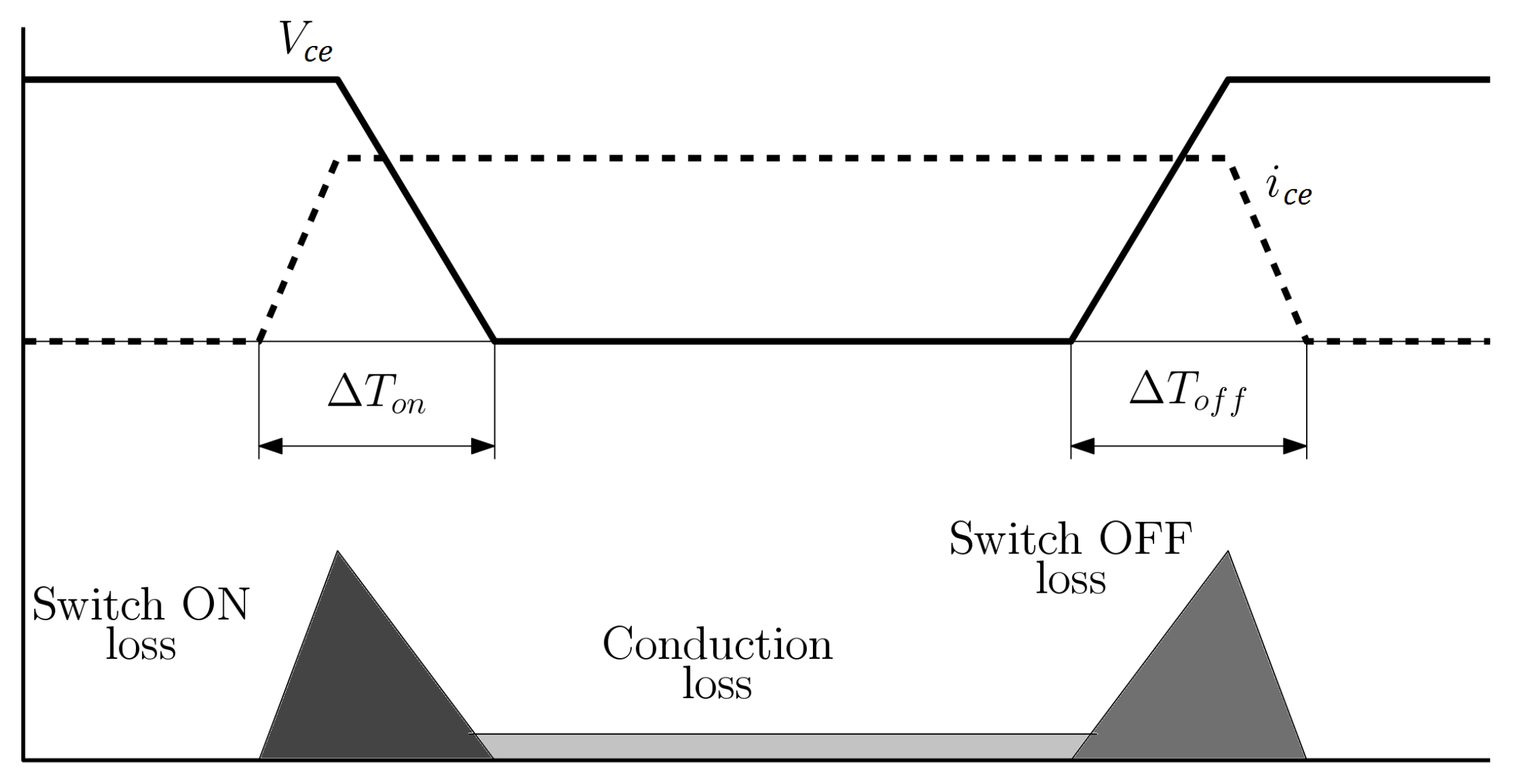
However, power losses in the power converters can only be studied if the operation of the power switches in the inverters is considered in the model, which are not included in the mathematical models described in
Section 2.3, due to the prohibitive computational requirements.
Therefore, another alternative to evaluate power losses in the power converters is suggested in this paper. Power measurements at the input and output of the B2B power converter are available in the experiments, from where the power losses in the B2B converter can be extracted.
Inverters’ efficiency varies as a function of load, with considerable efficiency drops at part-load and overload conditions [
45]. However, measurements in the experiments only cover the part-load operation of the inverters, since the rated power of the DFIG is lower than the rated power of the inverters used in the B2B converter (see
Table A3 and
Table A4 in the
Appendix A).
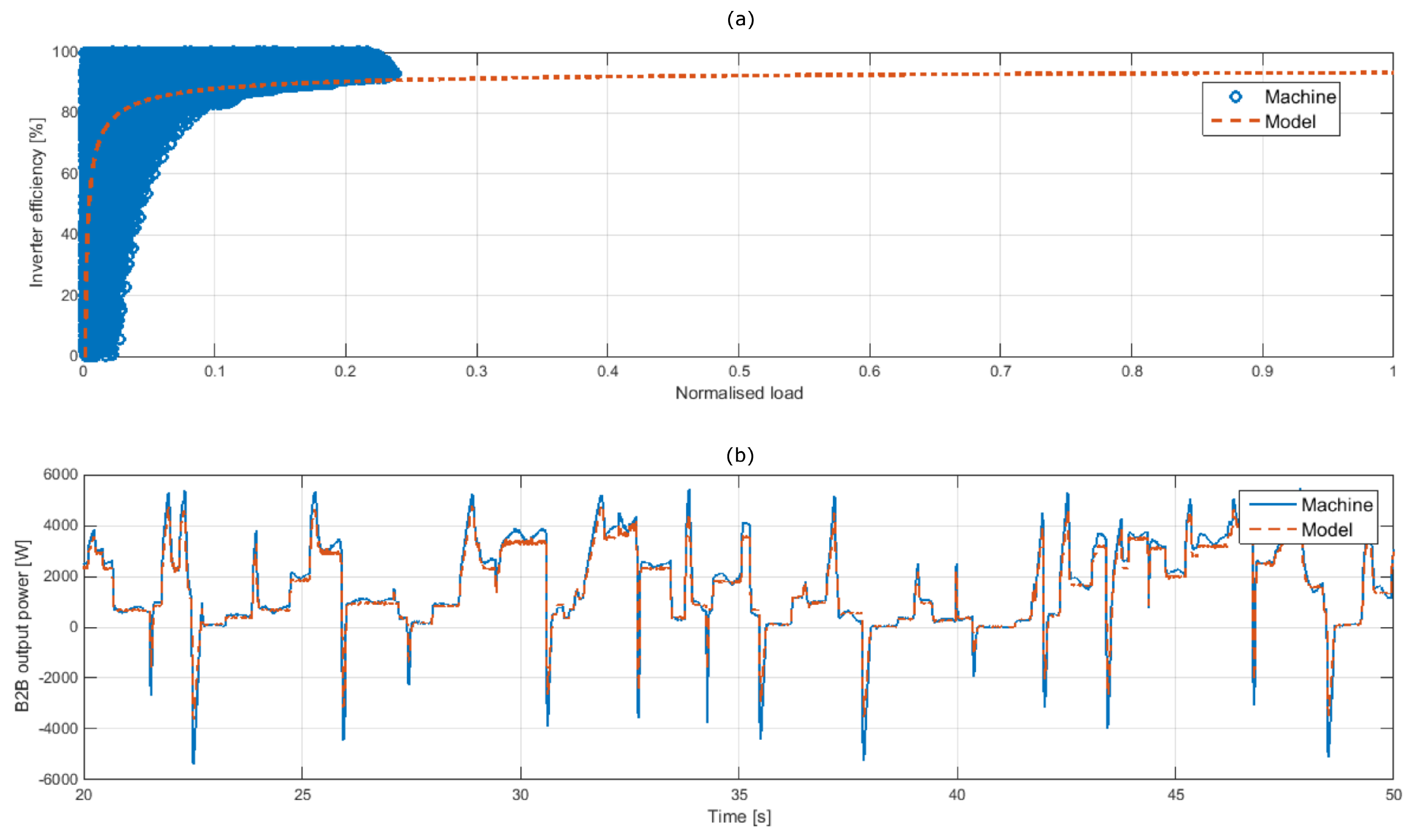
Figure 17a shows the efficiency of one inverter in the B2B converter as a function of normalised load, defined as the ratio between the input power of the B2B converter and the rated power of the inverters. The points from the experimental measurements clearly show the trend of the efficiency curve, so a power trend line, described in Equation (
25), is used to fit the experimental measurements, as shown in
Figure 17a. Using the fitted curve, power losses in the inverters can be calculated without prohibitively increasing the computational requirements of the mathematical model.
Table 5 shows the fidelity values of the power losses in the inverters of the B2B converter, obtained by comparing losses measured in the experimental platform to the losses obtained in the mathematical model, and
Figure 17b illustrates the power output of the B2B converter for the machine and the model. Fidelity values for all of the test cases show good agreement, particularly good for the test case Test 1c. This is because the efficiency curve is fitted using the specific data from Test 1c.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















