1. Introduction
A screw compressor is provided with a male rotor and female rotor, which intermesh with each other when they rotate. These screw rotors are asymmetrical in their contour, and usually have quite complicated profiles. The purpose of gear tooth development is to improve the performance of the screw compressor. Generally, the profile efficiency is measured by a number of factors, such as low contact force, smooth torque transfer, short meshing line length, and large cavity volume. In terms of efficiency, the rotor profile influences the performance of the screw compressor. To be brief, in order to improve the performance of the screw compressor, a designer is faced with various problems. For example, the main geometrical parameters for improving the operating efficiency of the screw rotor are the area between the rotors, the gap tolerance between the rotor and the housing, the sealing line length, and the blow-hole area, which area it is recommended to reduce. Several researchers have continuously studied rotor profile design to improve the performance of the screw compressor.
In the mid-1980s, the A type of rotor profiles proposed by the Swedish company SRM became the standard for the industry, and research on the screw rotor profiles then began in earnest. Stosic and Hanjalic [
1] proposed a general method for screw rotor profile generation. The rack-based profile generation method that they proposed contains all the elements of the modern screw rotor profile. There are limits for any commercial application, but it features a basis for further refinement and optimization. They observe that the main advantage of this method is its simplicity, which enables a variety of profiles to be created in a short time by practical rotor designers.
Tang and Fleming introduced a method to optimize the geometrical parameters for a refrigeration twin-screw compressor [
2]. In order to optimize the geometrical parameters, such as the smallest blow hole area, the shortest contact line length per lobe, and the correct discharge port position suitable for a given discharge pressure, they developed a simulation program for the geometric calculation procedure, and to simulate the working process.
Stosic [
3] proposed the envelope gearing method that is used to derive a meshing condition for crossed helical gears, and then used it to create the profile of a hobbing tool. The author applied the envelope theory of gearing as the meshing requirement for crossed helical gears. He showed that it was able to create a helical gear of the full meshing condition to the hobbing tool.
Stosic et al. [
4] discussed some optimization issues of the rotor profile and compressor parts, using a 5 × 6 screw rotor profile. The adopted method was based on a rack generation algorithm for the screw rotor profile, combined with a numerical model of the compressor parts. Their designed compressor demonstrated higher delivery and better efficiencies than those using traditional approaches.
Most of the researches related to the screw rotor profile are concerned with predicting the effect on the performance of the screw compressor with respect to changes in the design variables, such as clearance, meshing line length, and rotor diameter and speeds. In view of the fact that the rotor profile has great influence on the efficiency of the screw compressor, researchers have attempted to develop a new method to generate the profiles that give the rotors of the compressor the optimum working efficiency. Stosic et al. [
5] developed a comprehensive software package that included almost every aspect of thermodynamic and geometric modeling, and the capacity to transmit derived output directly into the CAD drawing system.
As for the operation characteristics of a gear compressor, time-dependent analysis is important in the internal compression stroke. This means that the boundary of the flow analysis area is changed during the calculation process. Therefore, when the gear rotates, the gear surface has a very complicated movement, which is becoming an important problem in CFD analysis. Several studies have been carried out with various attempts to find a breakthrough for CFD analysis.
Kovacevic [
6] proposed some aspects of the so called SCORG advanced grid generation method with an algebraic method that features boundary adaptation and transfinite interpolation used in CFD, so as to increase the accuracy of the flow prediction. In this way, it has been shown that the performance of a screw compressor can be improved.
Voorde et al. [
7] proposed a grid manipulator based on the ALE method. It is a time-dependent grid generation method that computes grid motions with local flow velocity in a stationary computational grid in a mixed form of Lagrangian and Eulerian methods. They showed that the compressible flow analysis calculation of a gear compressor is possible.
Rane et al. [
8] described the advantages of the algebraic grid by comparing the two methods for generating custom grids described above, i.e., algebraic grid generation and differential decomposition methods. Also they showed that newly developed grid approach can maintain a complete hexahedral cell topology for grid generation at non-conformal boundaries.
The finite volume method is a powerful CFD numerical technique that allows fast and accurate solution for fluid flow within complex geometries; however, an acceptable grid system that describes shapes accurately must be available, in order for the method to be used [
9].
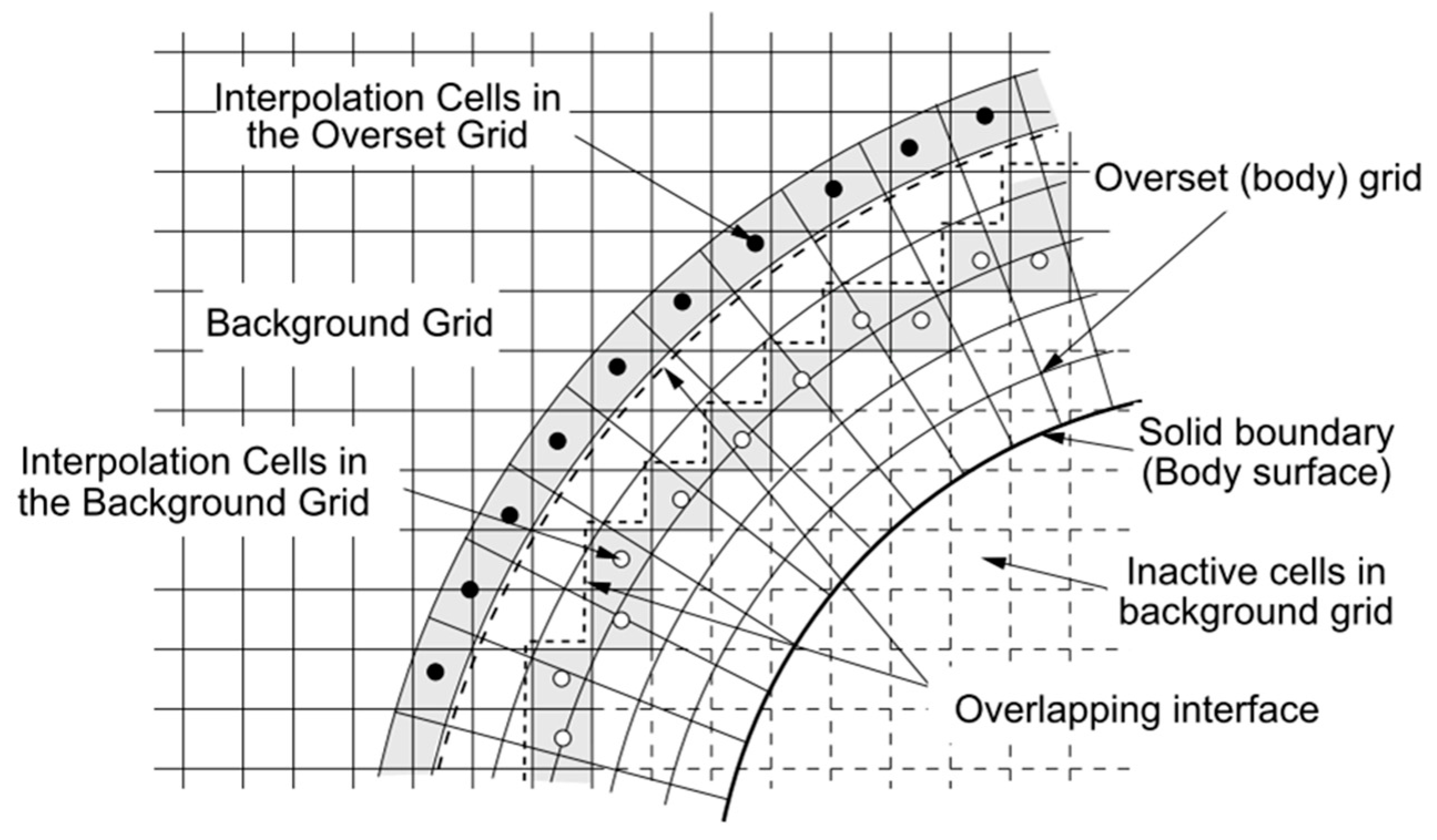
The aforementioned grid adjustment approach requires that the grids around the moving object could be transformed and regenerated to a new position at each time step. The flow solver can be easily conserved and the grids can be generated in domain conformal grid with one or several grid blocks to reduce the number of grids. However, this approach is not easy to interpolate the flow variables from old grid to new one at each time step. In addition, excessive processing and extra costs are required for grid generation. On the other hand, the overlapping grid method is based on the assumption that the grid components related to a complex and moving bodies are still in a stationary state, and the sub-grid components are superimposed on each other to define a relative motion by an arbitrary method. Among other two techniques, the overlapping grid approach offers more flexibility and the grid quality can be ensured. In this study, the CFD analysis of screw compressors was performed using the overlapping grid approach, which has been studied by many authors in recent years.
Steger and Benek [
10] briefly reviewed some of the composite grid approaches used in aerodynamic applications. Li et al. [
11] reported that the CFD prediction using dynamic overset CFD simulations consistently matched by extensive comparisons with experimental data for NREL VI wind turbine. Suman et al. [
12] carried out the unsteady analysis for the SSE using the overlapping grid method. Although the information of the computed variables is lost at the grid interfaces, the meshing strategy such as the overlapping grid method can be applied to the complicated machine such as SSE from the previous studies.
The objective of this study was to determine the flow characteristics through CFD application of the screw compressor having a positive displacement process. In addition, this study describes the theory of screw rotor tooth profile generation and compares the CFD analysis results with the experimental results.
2. Theoretical Background
A screw rotor profile usually contains various kinds of functions, and it consists of mostly circular, cycloid, and arc curves.
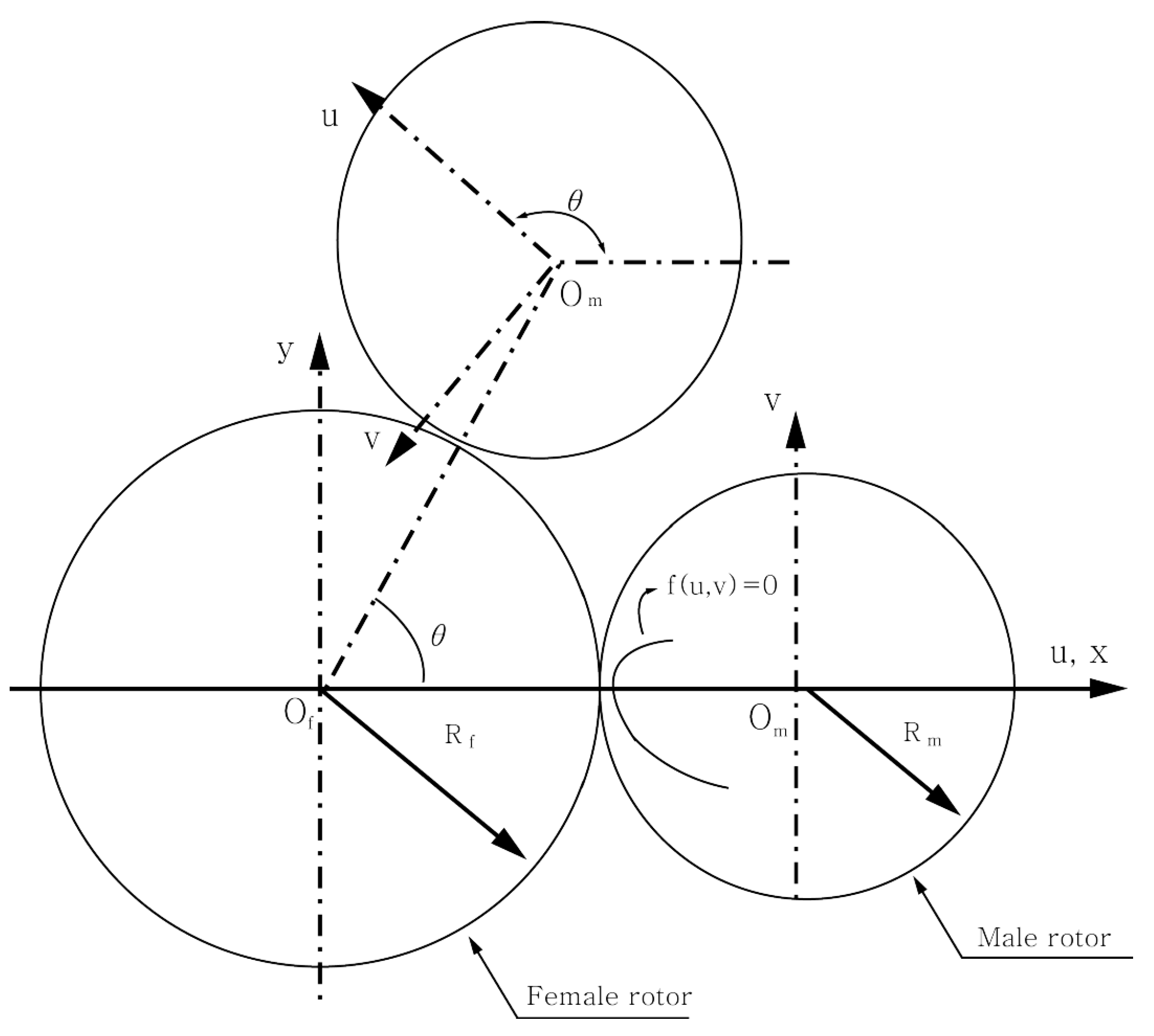
Figure 1 shows a male rotor rotated around a female rotor in the
x-
y coordinate system, which is fixed to the female rotor, while the
u-
v coordinate system is fixed to the male rotor. When the male rotor rotates by
φ around the female rotor, the male rotor is rotated by
θ in the
x-
y plane. Therefore, the conversion formula of the
x-
y and
u-
v coordinate systems is defined in Equation (1) [
13,
14]:
If the rotor profile curve of the driving rotor can be defined from the relation function of Equation (1), a rotor profile of the dependent rotor could be produced that satisfies a pair of meshing conditions.
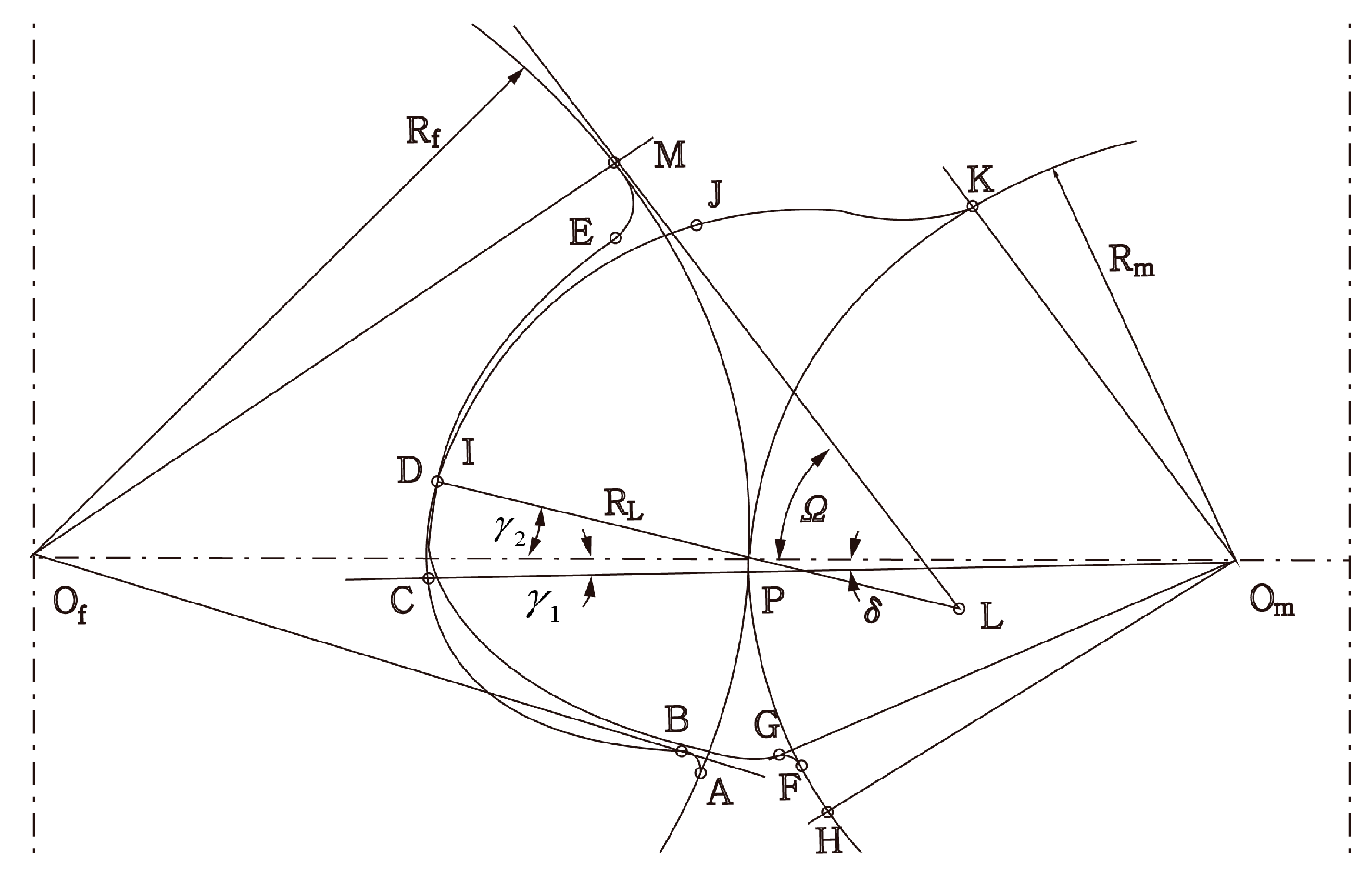
Figure 2 shows the location of arbitrary points on the dependent rotor profile in contact with the drive rotor. The driving rotor as a basis in the profile generation method is the female rotor, and the dependent rotor that is generated by the envelope function is the male rotor. The line that is used to generate the rotor profile is composed of an epi-trochoid, epi-cycloid, and a circular arc connecting each position.
Table 1 shows the shape of the curve for each position of the male and female rotors, of which the following equations are defined [
15].
A–B: Insert the circular arc of radius rs after the selection of the center position of point C so as to satisfy the continuous condition at points A and B.
B–C: The trajectory of a trochoid curve at point H, when the center
Om of the circle is rotated around the center
Of of the circle:
C–D: The arc of the radius R centered on the pitch point P:
D–E: The radius R
L of the circular arc centered on the point L, where the location is the intersection of the tangent line of the arc on point M and of the extension line in the D–P:
where:
E–M: The circular arc of the radius
Rs, satisfying the continuity of point C in points M and B:
Table 1 shows that the profile curves of the male rotor as a dependent rotor are generated by curves of the same contact trajectory with circular arc that is generated by the equations to the A–M. The male rotor was composed of circular arc with the same contact trajectory as each section of the female rotor described above.
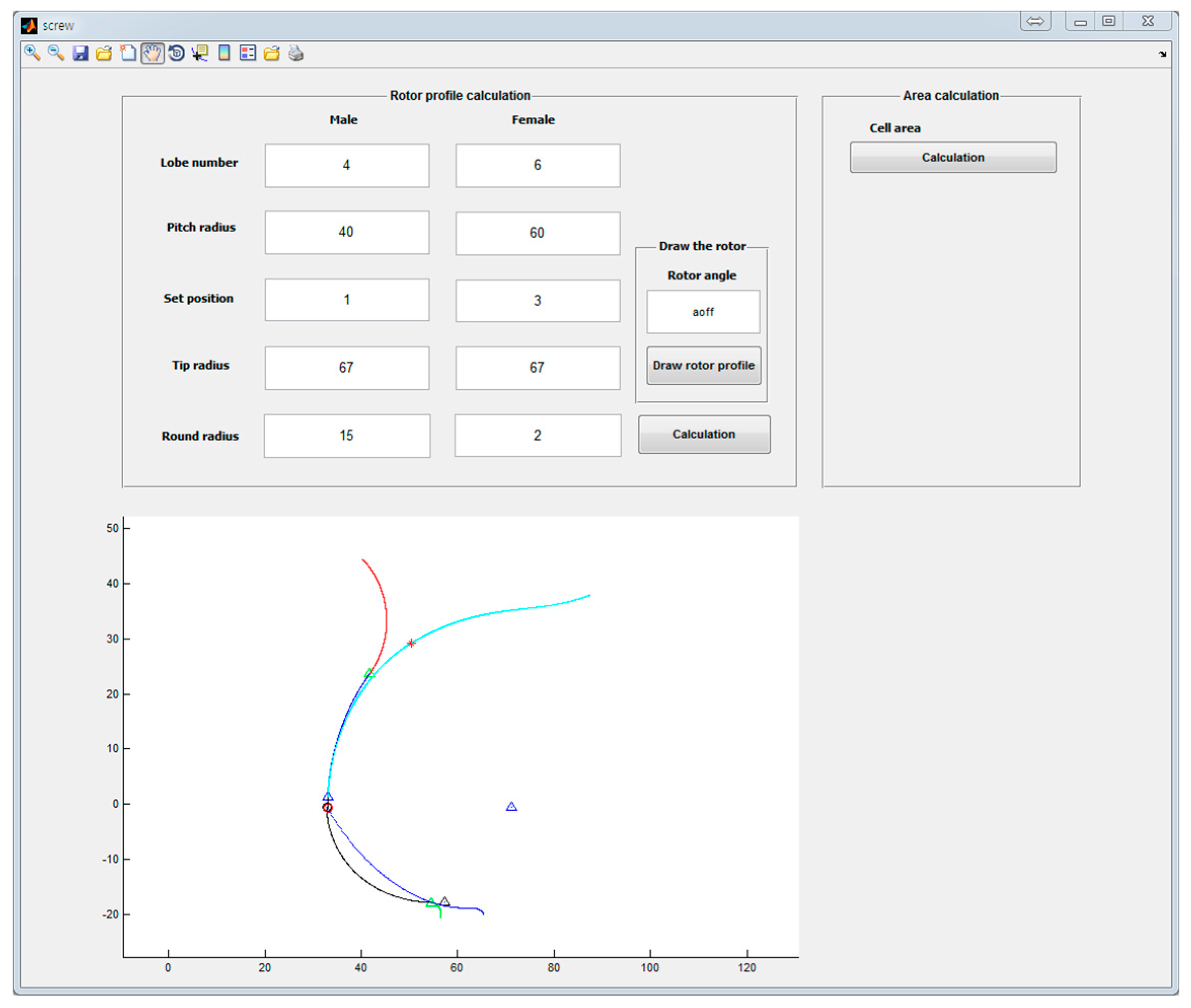
In this study, a MATLAB (Matlab 2015a, The MathWorks, Inc. Company: Natick, MA, USA) based tool design program was developed so as to easily obtain the curves equations from the design variables of various sizes and combinations required by the designer.
Figure 3 shows the MATLAB-based program that can be used to calculate the screw rotor profile through the basic input variables. The basic input variables for rotor profile calculation are the number of lobe combinations, rotor radius, lobe end radius, and lobe width.
4. Experiments
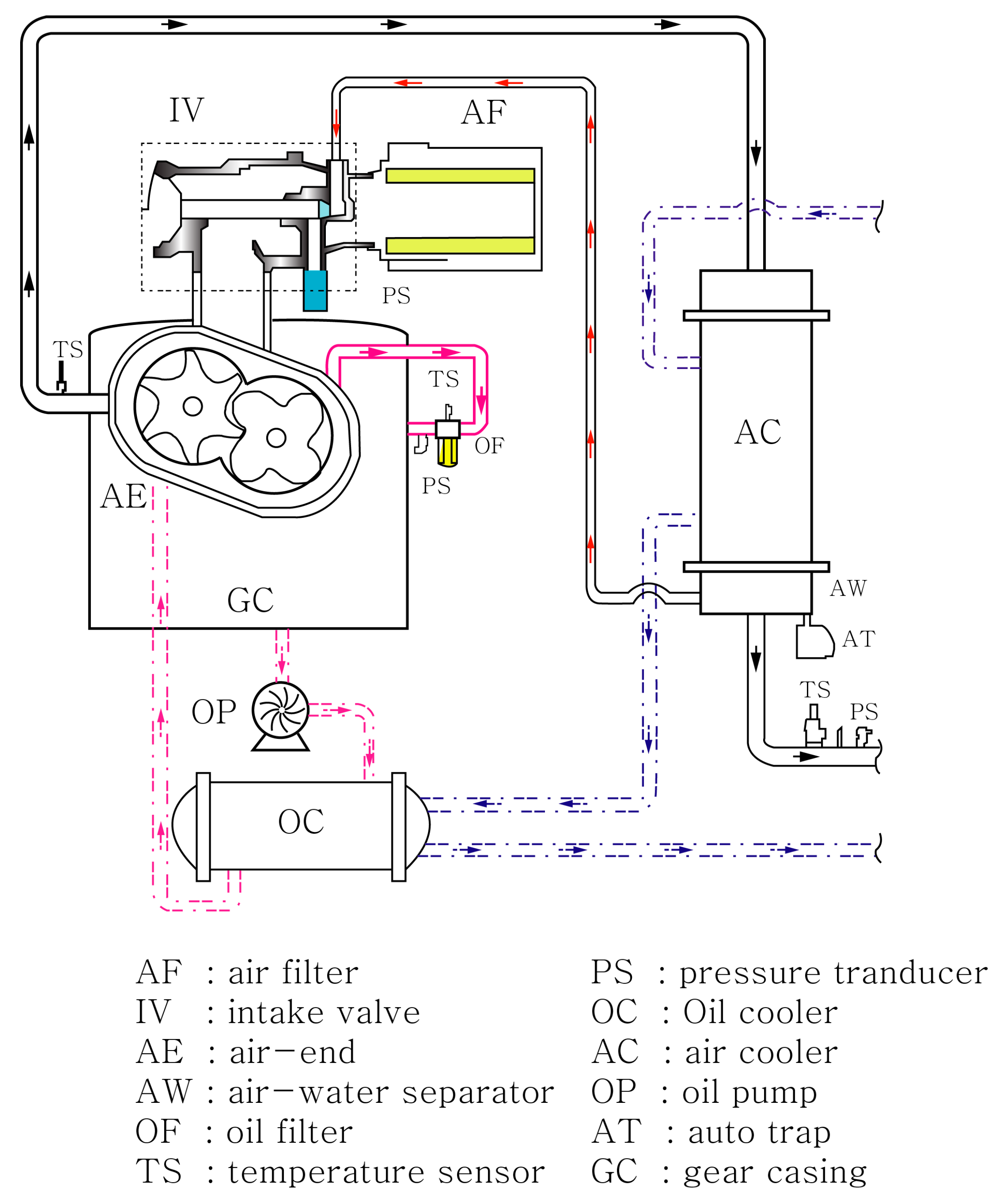
The experimental equipment used in this study was prepared to test the performance of the oil-free screw air-end. It was fabricated based on the flowchart shown in
Figure 8, and is based on the quality standard specified in the volumetric compressor test and inspection method [
17]. The atmospheric 25 °C working fluid, i.e., air, flows into the screw compressor through the air-water separator and the air filter. The air is compressed through the variation of the enclosed volume by the rotation of the female and male rotors. The experimental equipment is designed to record and store signals generated by instruments, such as temperature and pressure sensors, installed between each component part to a data acquisition system. The experimental model applied to this study has a cooling jacket, and the temperature of the inlet and the outlet of the cooling oil are maintained at 25 ± 3 °C. Experiments were carried out in the range of the ambient temperature and the inlet air temperature not exceeding 20 ± 1 °C.
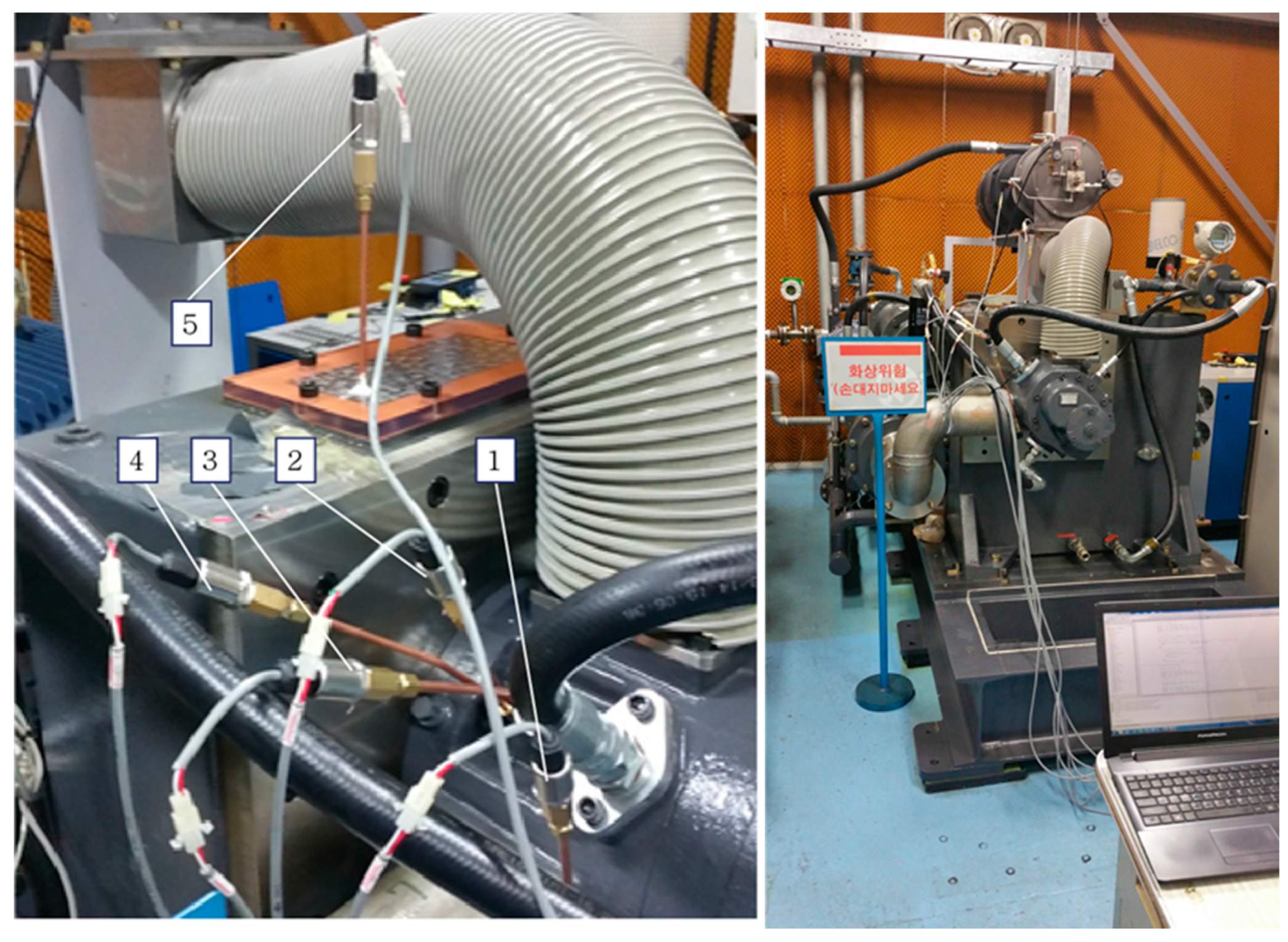
Figure 9 shows the experimental apparatus consisting of a system based on the schematic diagram of
Figure 8, as previously mentioned.
It is difficult to measure the pressure of the inflow air into the screw compressor according to the compression process. This is because the compression progresses as the enclosed volume formed by the compressor housing and the inner rotor continuously changes. In addition, the rotation speed of the male rotor is 13,000 rpm, and the rotation speed of the male rotor tip is 152.47 m/s. One rotation per 4.6 ms requires a data storage device with a high sampling speed, and a pressure sensor with a high resonance frequency.
The data processor uses a 100 kHz DAQ mode for each pressure sensor. The pressure transducer adopts a model to satisfy the condition of 0.3% precision, 1 ms response time, and operating pressure range of −0.1~0.3 MPa. The left figure in
Figure 9 shows the pressure transducer inserted at five positions corresponding to the rotation angle (6~290°) of the male rotor, in order to measure the periodic pressure signal from the start of compression to the discharge part. In order to represent the measured pressure signal in the form of a pressure curve for the rotor, pressure curves are derived through signal combinations at each position.
5. Results and Discussion
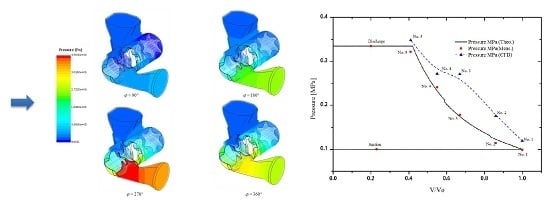
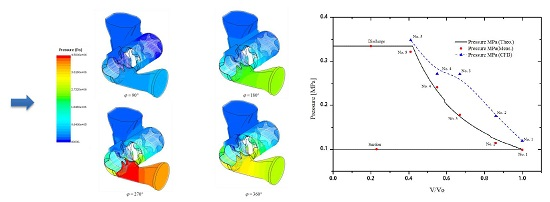
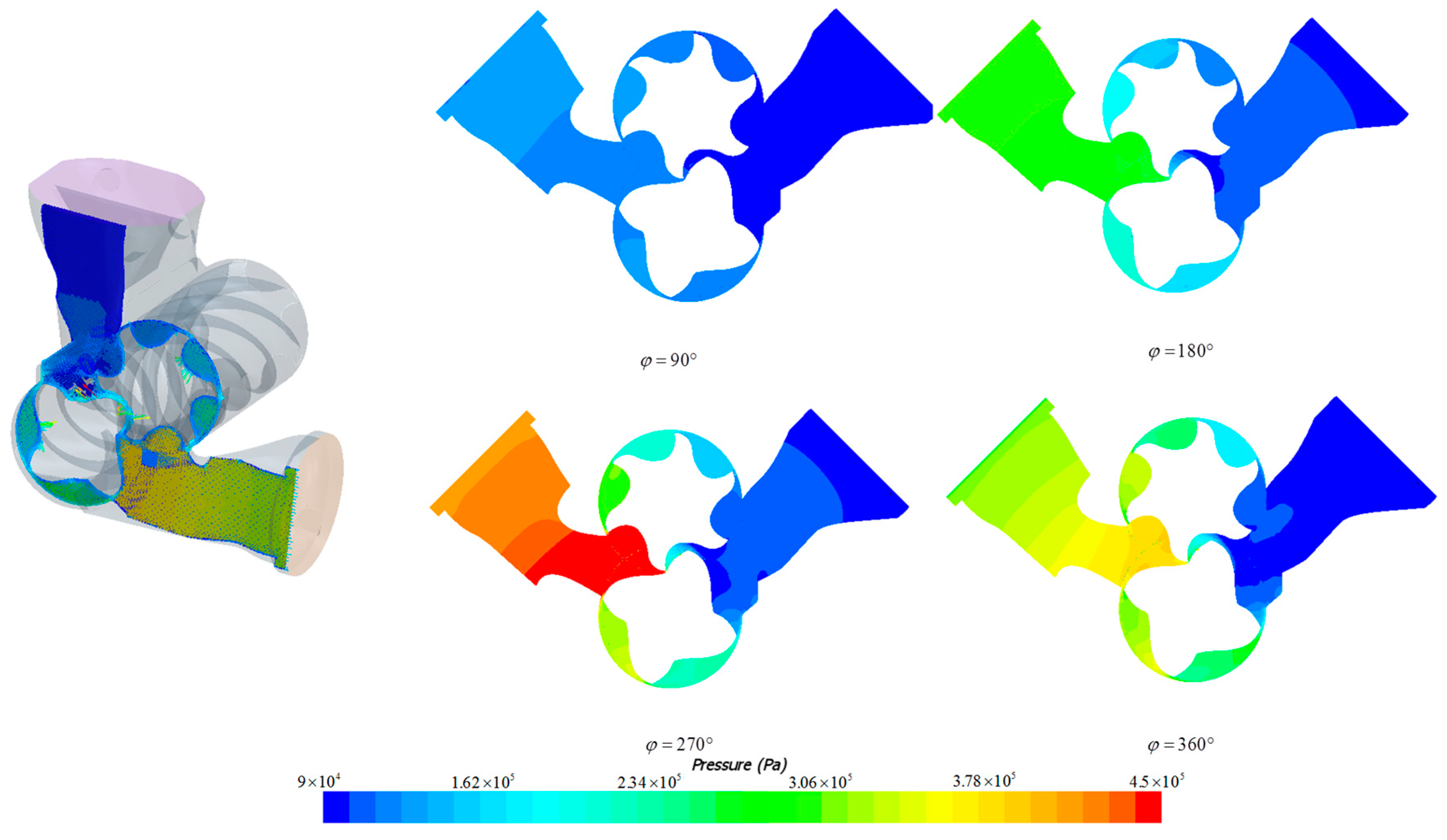
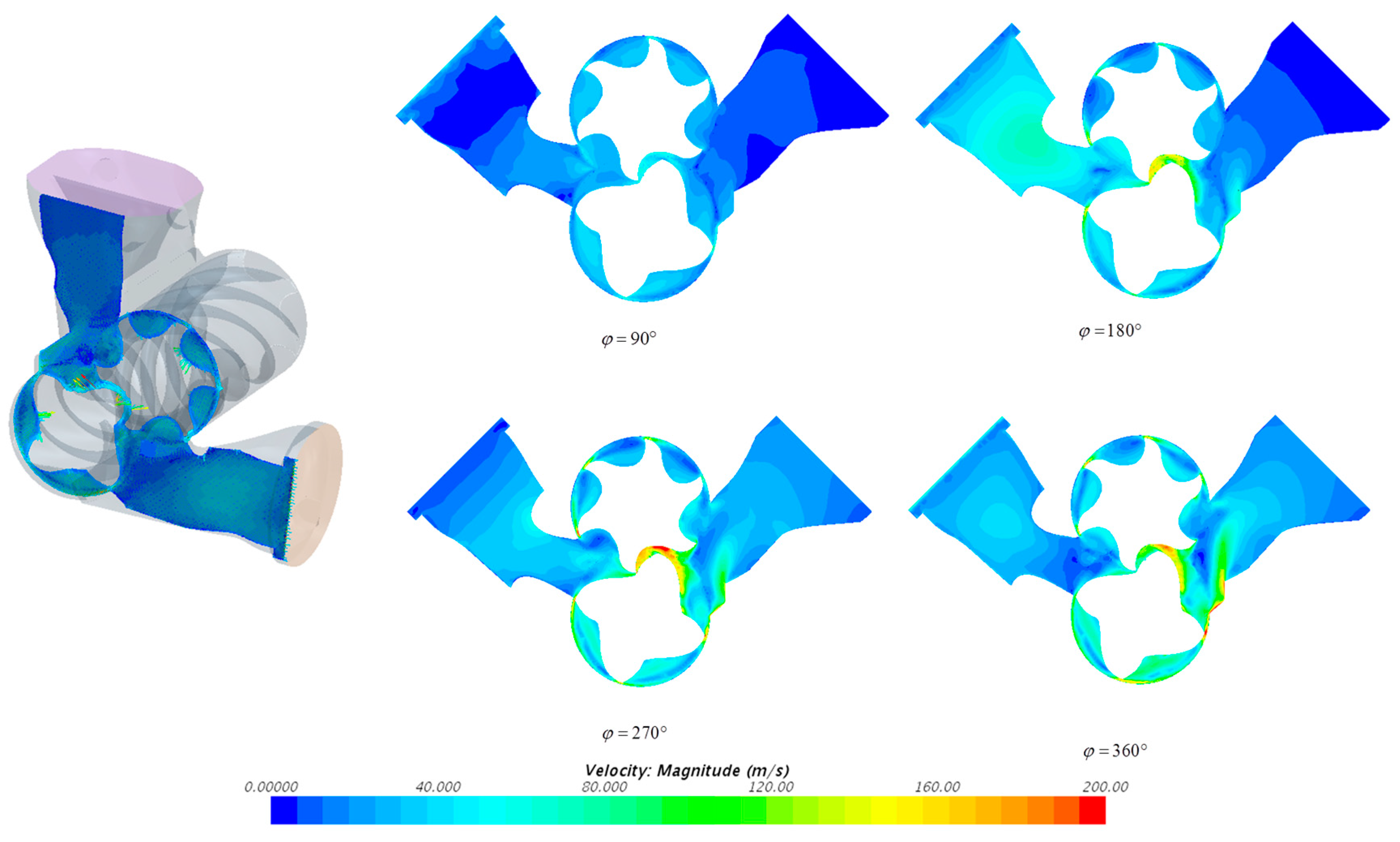
Figure 10 and
Figure 11 show the pressure and velocity distributions at the cross-section of 15 mm from the end of the screw compressor housing.
The male rotor rotation angle shows a pressure distribution change by 90° at the 90~360° angle range in the converted time step. As can be seen from the results, as the rotor rotation angle increases, the suction port shows a value of about 100 kPa lower than the atmospheric pressure, and suction of the operating air is induced.
The compression stroke finishes from the female and male rotor of the discharge port, and the pressure gradually decreases from the end of the rotor lobe toward the discharge port.
Figure 10 shows that the maximum value of the pressure at the end of the lobe is about 370 kPa, and the pressure at the outlet port is 317 kPa. The volume gradually increases as the enclosed volume decreases between the rotors.
As the rotor rotation angle increases, the velocity of the fluid out of the rotor is about 26 m/s. As the rotor moves toward the discharge port, the velocity decreases at about 40 m/s at the neck-narrowing portion. The velocity decreases at the end of the discharge port, and the value of about 10 m/s is calculated.
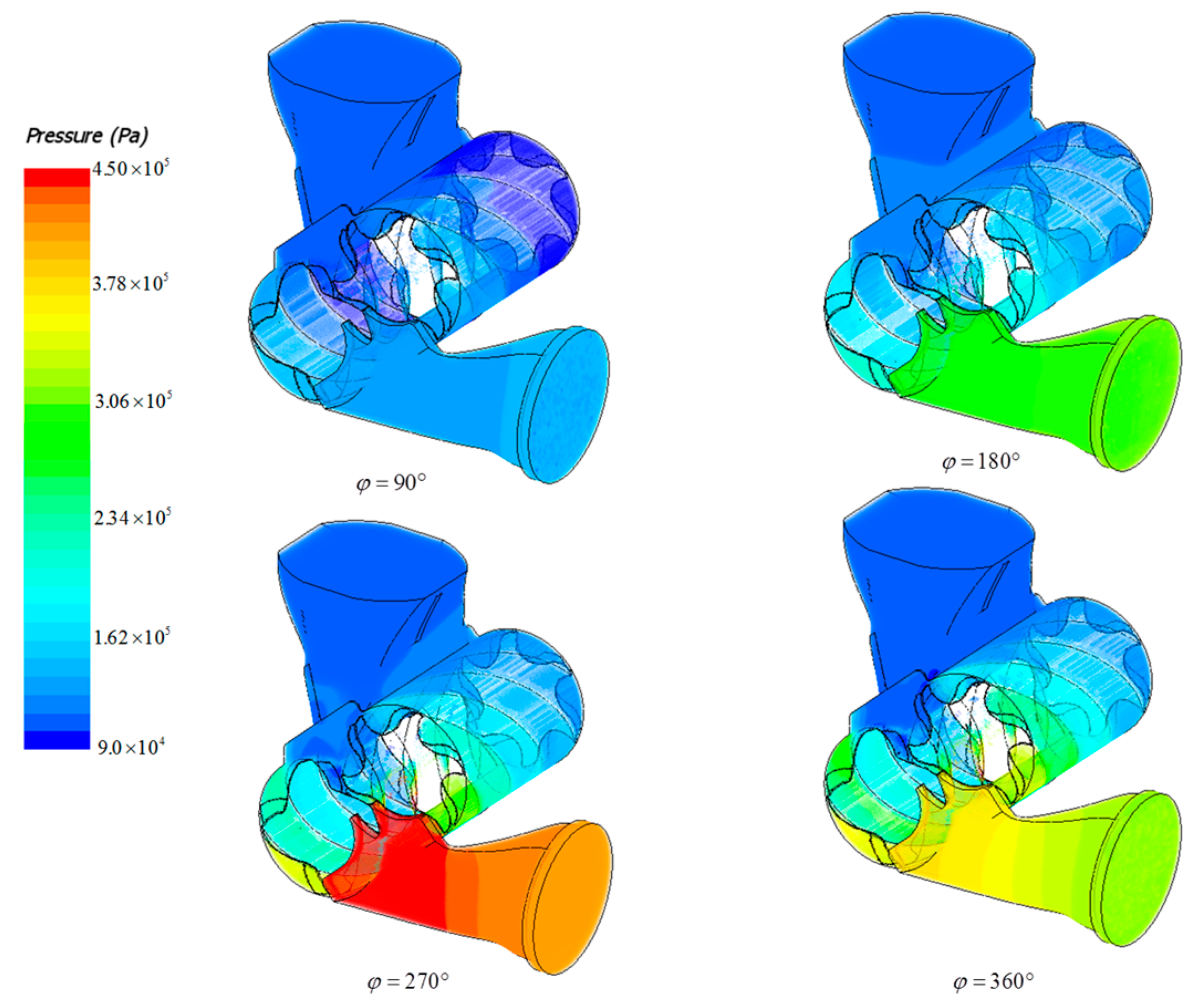
Figure 12 shows the volume rendering results of the pressure distribution according to the rotation angle change. The discharge port reduces the friction caused by the kinetic energy, and at the same time the ability to reduce the dynamic energy with the working fluid to the static pressure. Therefore, when the pressure of the working fluid is completed, the compression stroke between the ends of the rotor due to the shape of the discharge port is 270°. The pressure of the working fluid in which the compression stroke has completed is about 420 kPa.
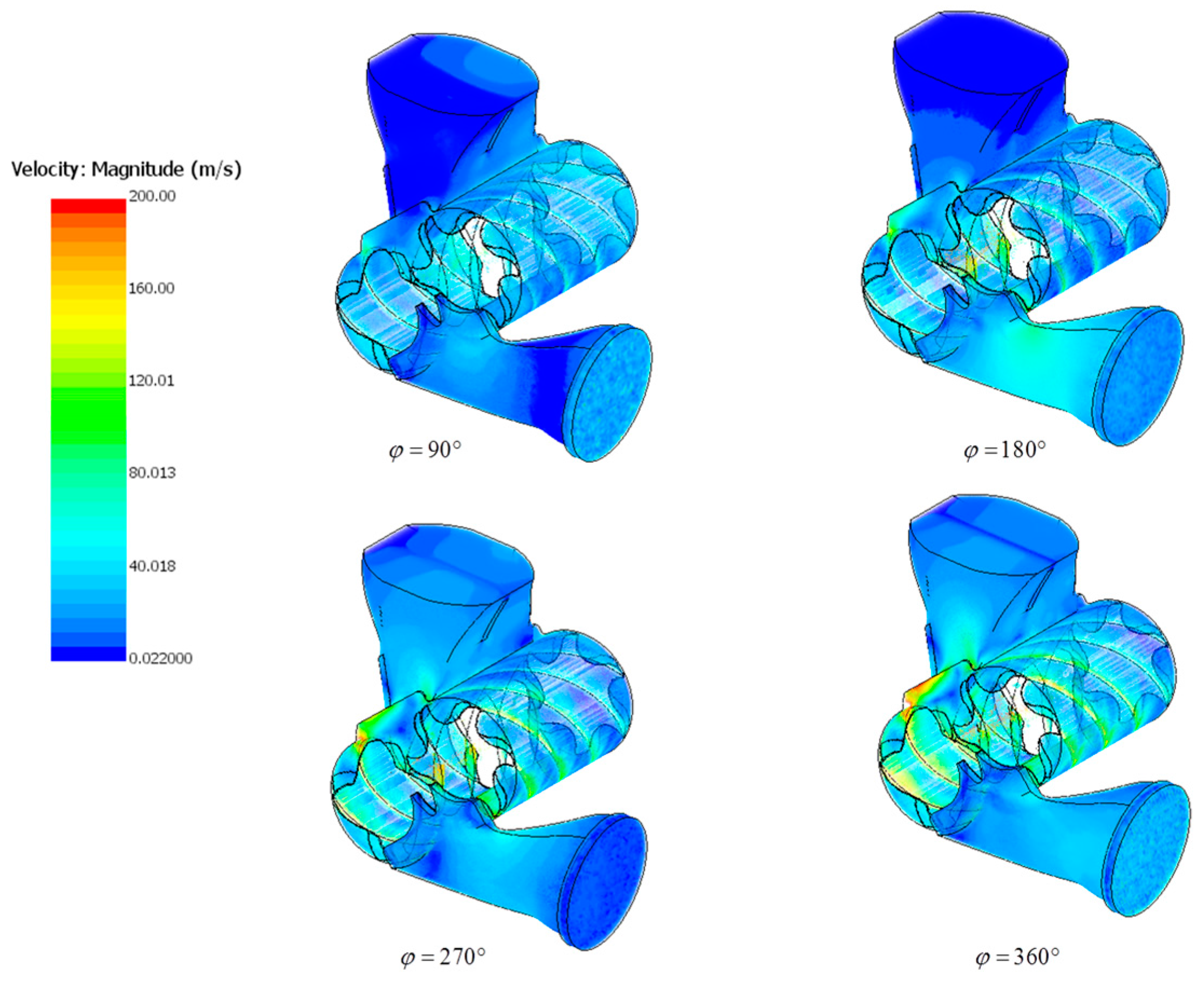
Figure 13 shows the rendering calculation results of the velocity distribution volume according to the rotation angle change.
This shows that the kinetic energy increases locally at the velocity of 200 m/s in the suction port direction at the end surface of the discharge port in the direction of the discharge port, with an average of about 140 to 160 m/s along the seal line of the screw rotor.
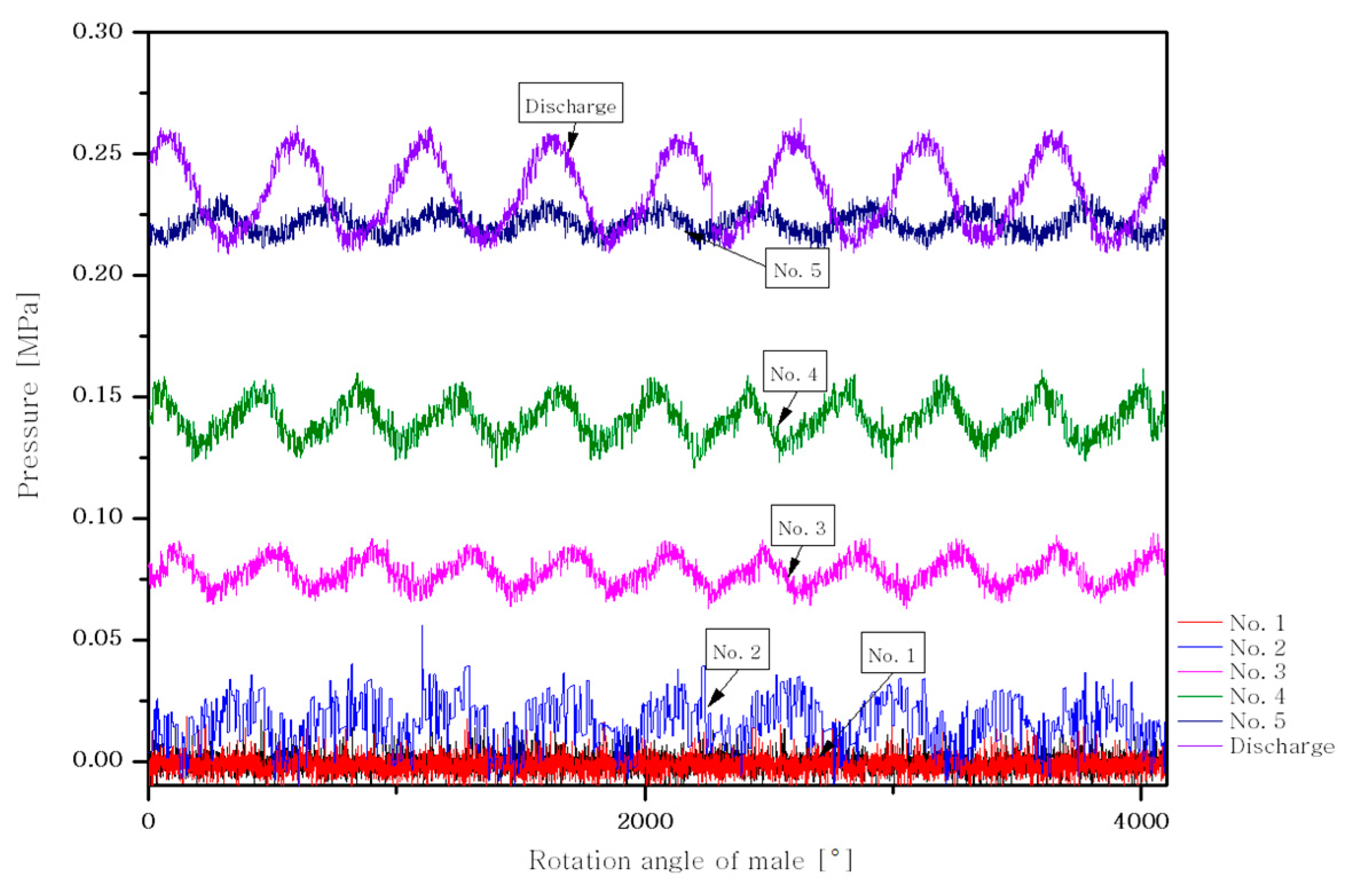
Figure 14 shows a periodical pressure change signal measured over the entire process in the compression stroke. As shown in
Figure 13, the measurement values are shown at each of the positions 1~5 as described above, in order to measure the periodic pressure signal from the start of compression to the discharge part, according to the rotation angle of the rotor. The signal measured through this experiment is defined as a function of the pressure curve for the male rotor. By using this value, we set the polynomial function form to the outlet boundary condition of the CFD analysis.
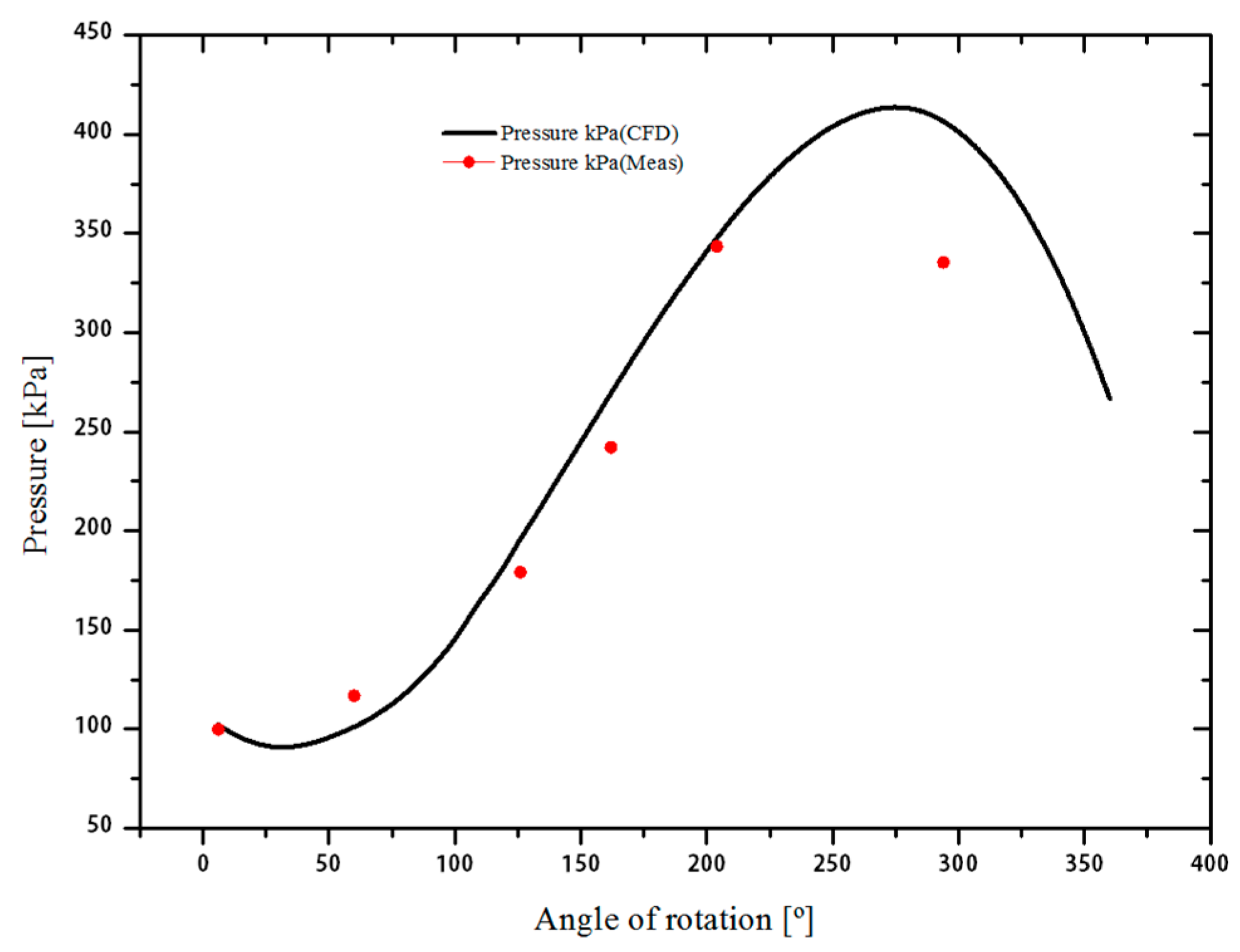
Figure 15 compares the change in pressure at the outlet with changes in rotation angle of the male rotor. The measured sample data are the mean values of the pressure measured at the place where the five pressure transducers are installed, and the exit pressure boundary condition is set as the interpolation value for the pressure value at each position, because the number of sample data is small. Therefore, it is confirmed that the error rate with respect to the pressure value increases after 200° of rotation angle.
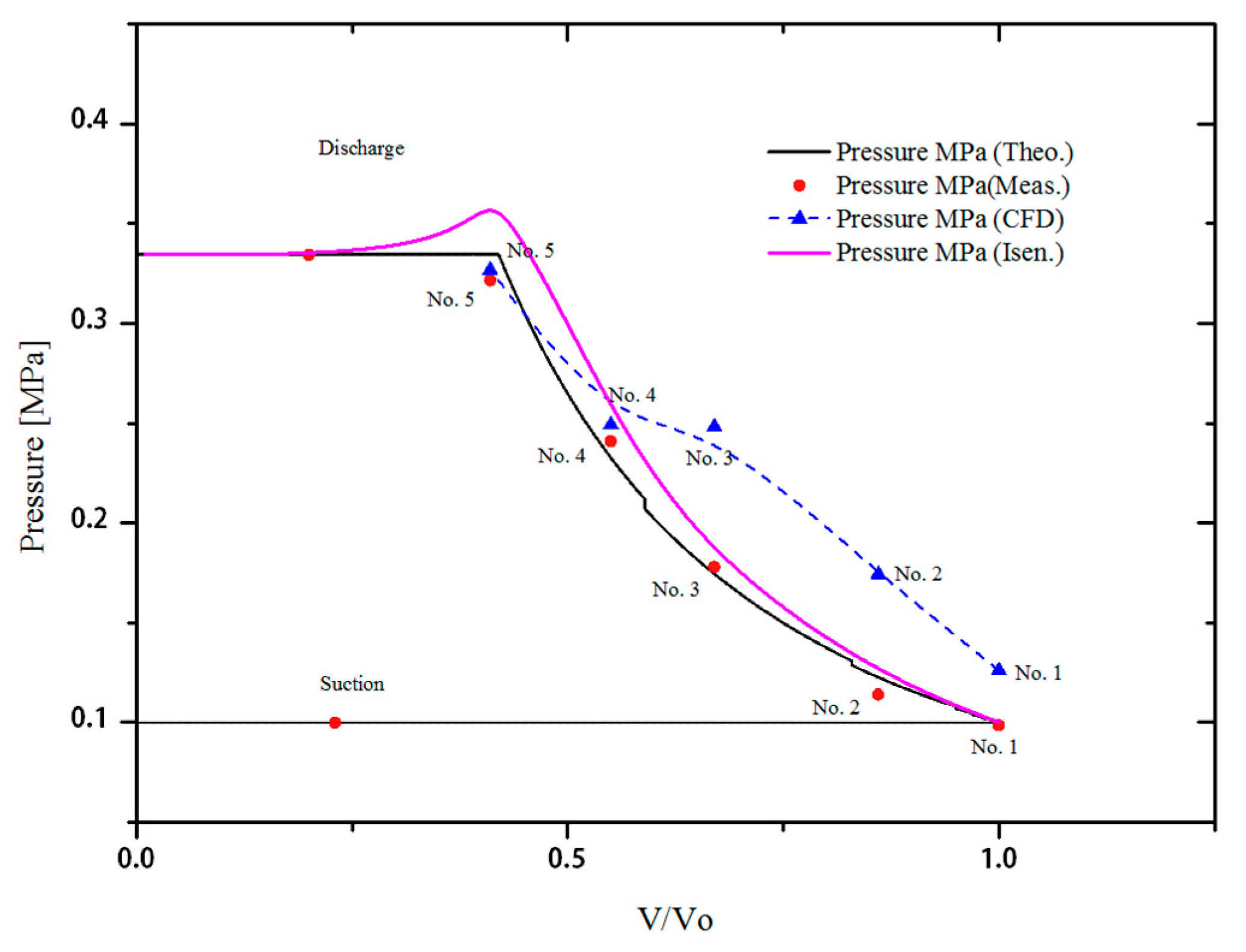
Figure 16 compares the theoretical and experimental measurements and CFD for the p-V indicator diagram. The experimental model of this study showed that the cooling jacket that was installed cooled the working fluid during the compression process, resulting in a measured value that was close to the isothermal process. It is confirmed that the CFD results are similar to the curve of the isentropic process, because heat exchange is not performed in the adiabatic condition.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}