1. Introduction
Among various renewable energy sources, wind power has been considered as one of the most rapidly growing energy sources. The total installed wind power capacity worldwide reached 432.6 GW at the end of 2015 [
1]. The penetration level of wind power in the power system has significantly increased, and the influence of wind plants in power system operation becomes more important. For these reasons, utility operators have gradually updated their grid connection requirements (GCRs) for generators [
2,
3,
4]. One of the serious issues is Low-Voltage Ride-Through (LVRT), namely the wind power system is required to remain connected when a grid dip occurs, contributing to keeping the network voltage and frequency stable by delivering active and reactive power to the grid with a specific profile depending on the grid voltage dip depth.
Variable speed is the dominant technology for wind turbines in the current market [
5,
6]. Either a Double-Fed Induction Generator (DFIG) with a Partial-rating power converter [
7,
8] or a direct-driver Permanent Magnet Synchronous Generator (PMSG) with a full-rating converter is employed. In comparison with DFIG, the PMSG-based wind power system is more attractive because of its simple structure, wide operating range, high power density and complete decoupling from the grid [
9,
10].
At a grid fault, the output power of PMSG decrease instantaneously and results in the swell of the DC-link voltage, which seriously impacts the stable operation of the PMSG system, even leading to being off-grid in some situations. Stable DC-link voltage is the key to enhance LVRT for PMSG systems. Several methods for LVRT fulfillment are found in the literature, and they can be classified into two groups: add auxiliary equipment and improve the control method. (1) Adding auxiliary equipment: The combined control of a DC circuit breaking resistor, the turbine blade angle and converters was proposed in [
11,
12]. The work in [
13,
14] proposed the use of energy storage systems to store mismatched energy. Additionally, the Dynamic Voltage Restorer (DVR) was used to compensate the symmetry, and asymmetrical grid voltage fault was proposed in [
15]. A similar Static synchronous Compensator (STATCOM) was used to provide reactive power support to improve the grid-voltage in [
16]. In [
17], the Series Dynamic Breaking Resistors (SDBRS) were suggested to consume the excess active power during grid voltage dips. The auxiliary grid-side converter paralleled with the grid-side converter to enhance LVRT capability and improve power quality was proposed in [
18]. However, the use of these devices will increase the system cost and multi-device coordinated control complexity.
An improved control scheme seems to be a more attractive method when considering cost. Mismatched energy is temporarily stored in the moment of inertia of the wind turbine, not needing auxiliary devices. The work in [
19] suggested reducing the generator-side converter output power in proportion to the grid voltage reduction. The DC-link voltage control by the generator-side converter instead of grid-side converter was explored in [
20,
21,
22], so that it is easier to keep the DC-link voltage constant by increasing the generator speed during grid voltage sags. However, subject to the nonlinear relationship between the generator speed and DC-link voltage, the Proportional-Integral (PI) controller does not have good performance, and a complexity controller, such as the fuzzy control method [
22], is developed. In the literature [
23], the DC-link voltage is regulated by the grid-side converter under normal conditions, instead of being controlled by the generator-side converter during grid-voltage sags. In [
24], a unified DC-link current controller was developed for Current Source Converter (CSC)-based wind power systems.
This paper proposed a new LVRT control strategy for the PMSG-based wind power system. The grid-side converter and generator-side converter are both intended to regulate the DC-link voltage when the grid voltage dips deeply. Reactive power support and asymmetrical voltage dips also are considered in the paper.
The rest of the paper is organized as follows:
Section 2 details the basic characteristics of PMSG and the traditional control methods; the proposed controlled strategy is given in
Section 3. The simulation results and experimental results are found in
Section 4 and
Section 5, respectively. Finally, brief conclusions are formulated in
Section 6.
2. Modeling of the PMSG-Based Wind Power System
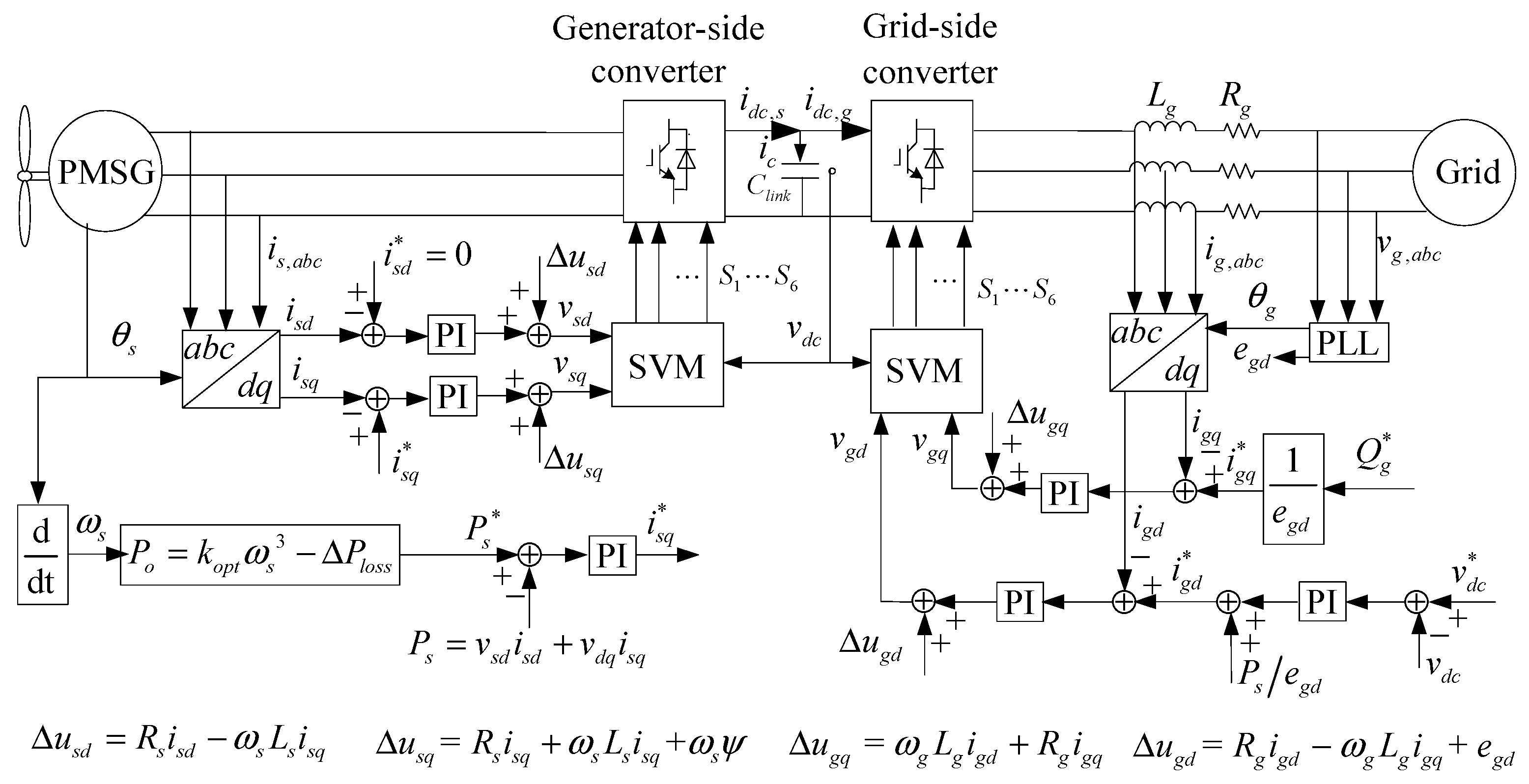
The study of PMSG-based wind power systems and the conventional control diagram are shown in
Figure 1. The PMSG system consists of the wind turbine, a PMSG and a fully-rated back-to-back PWM (Pulse-Width Modulation) converter. The back-to-back PWM converter consists of a generator-side converter, DC-link capacity and a grid-side converter.
For the generator side, in the rotor flux orientation rotating frame, the electrical equations of the PMSG are expressed as in [
7]:
where
and
are the d-and
q-axis stator voltage,
and
are the
d-axis and
q-axis stator inductance (for the generator with surface-mounted permanent magnets,
d-axis and
q-axis inductance are the same (
)),
and
are the
d-axis and
q-axis stator currents,
is the electrical angular speed,
is the magnetic flux and
represents stator resistance.
For the grid side, in the grid voltage orientation rotating frame, the electrical equations of the grid-side converter are:
where
and
are the
d-axis and
q-axis grid voltage,
and
are the
d- and
q-axis grid currents,
and
are the
d- and
q-axis grid-side converter output voltages,
and
represent the grid-side resistance and inductance and
is the grid angular frequency.
Assuming that the loss of the converter is neglected, generator side input power
and grid-side output power
can be expressed as [
8]:
where
and
are DC currents of the generator- and grid-side converter.
Applying Kirchhoff’s current law to a DC-link capacitor node, it follows that
; hence:
According to Equation (5), when the system is operating in the steady state, the input power of the generator-side is equal to the output power of the grid-side and satisfies the equation: and keeps constant. When the grid suffers a fault, the grid voltage reduction will induce the active power delivered to the grid to decrease, and it will be less than the output power for the generator. The mismatched power occurs and induces the DC-link voltage increase.
The conventional control strategy is also provided in
Figure 1. The function of the generator-side converter is to extract maximum power by regulating the torque-producing current
. The maximum power tracking (MPPT) method based
curve is used in this paper [
21].
The maximum power of the wind turbine can be calculated with the maximum power coefficient
and the optimal Tip-Speed Ration (TSR)
as:
where
is the air density,
is the blade swept area,
is the turbine rotor angular speed,
is the maximum power coefficient,
and
is the radius of the blade.
with direct-driven PMSG, and considering power loss, the generator power reference is given by:
is not easy to calculate; for simplicity, in this paper,
only considers generator power loss ,grid power loss and frictional loss, and other losses are treated as a constant,
.
can be expressed as:
where
F is the friction factor.
To decouple the
q-axis and
d-axis current control in the rotor flux orientation rotating frame, from Equation (1), the feed forward compensation terms are introduced as:
For the grid-side converter, the control object is to keep the DC-link voltage constant by controlling the grid-side d-axis current and providing the q-axis reactive current.
When the
d-axis of the grid-side synchronous rotating frame is aligned with the grid-voltage vector,
. Additionally, according to Equation (2), the forward decoupled compensation terms in the grid-side current control loops are given as:
According to Equation (5), DC-link voltage depends on the grid-side and generator-side active power. Normally, grid-side
d-axis current
is utilized to regulate DC-link voltage, while
is treated as disturbance. In order to quickly control the DC-link voltage, it can calculate the generator-side active current (
) and feed an equal amount of current to the grid-side
d-axis current [
25,
26], so as to make
However, when the grid voltage drops, the maximum grid-side converter active power is reduced in proportion to the grid voltage reduction, for the upper limit of the converter current is a constant. The conventional control strategy regulating the DC-link voltage relies solely on the grid-side converter. When the grid voltage drops deeply, the power capacity of the grid-side converter will decrease, and will reach the upper limit of the grid-side converter. The grid-side converter will lose the control ability of the DC-link voltage, and the DC-link voltage will continue to rise if not quickly consumed or will reduce the input power from the generator side.
3. Proposed Control Method
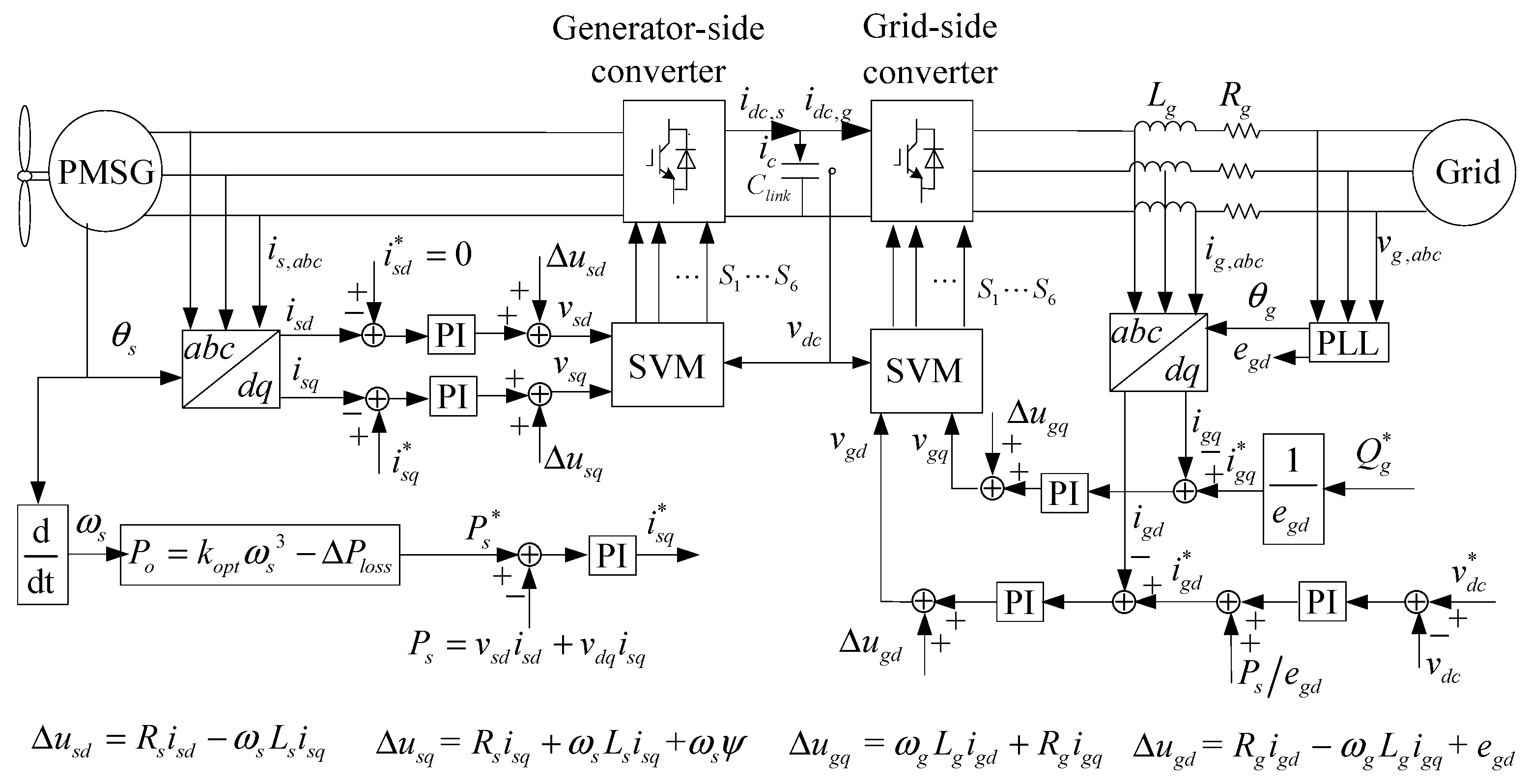
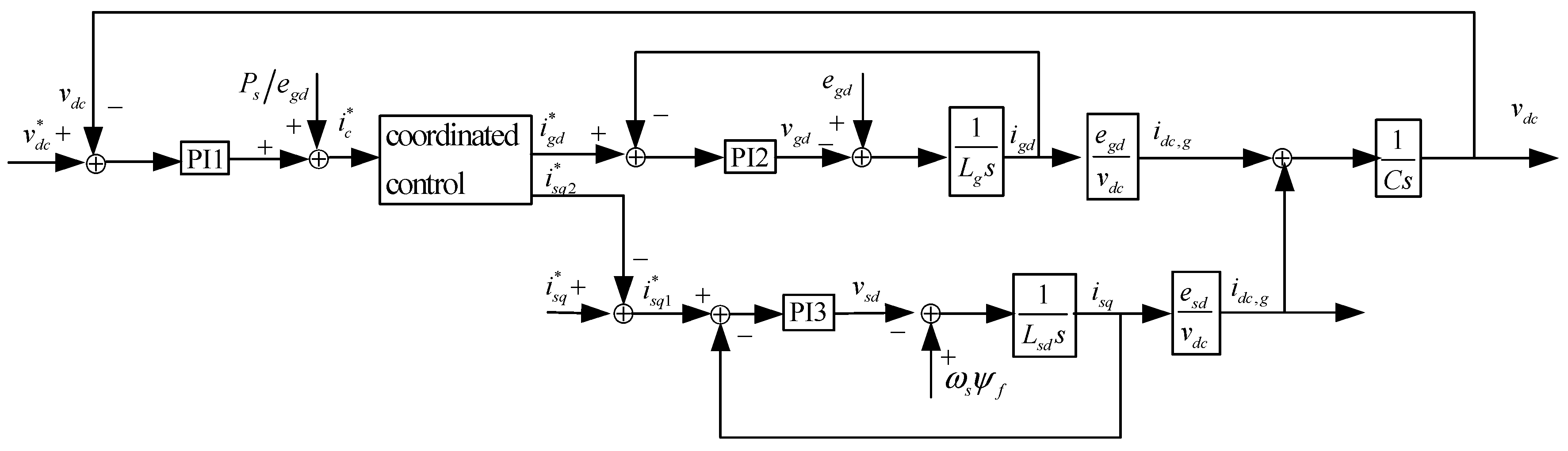
The proposed control block diagram for the system is shown in
Figure 2. Compared with the conventional control strategy in
Figure 1, the improved Parts are highlighted in blue lines, and it can be divided into three Parts. Part 1: Reactive power support according to E.ON grid-code requirements; Part 2: DC-link voltage control based on coordinated active power; Part 3: negative sequence voltage feed-forward. They are detailed as follows, respectively.
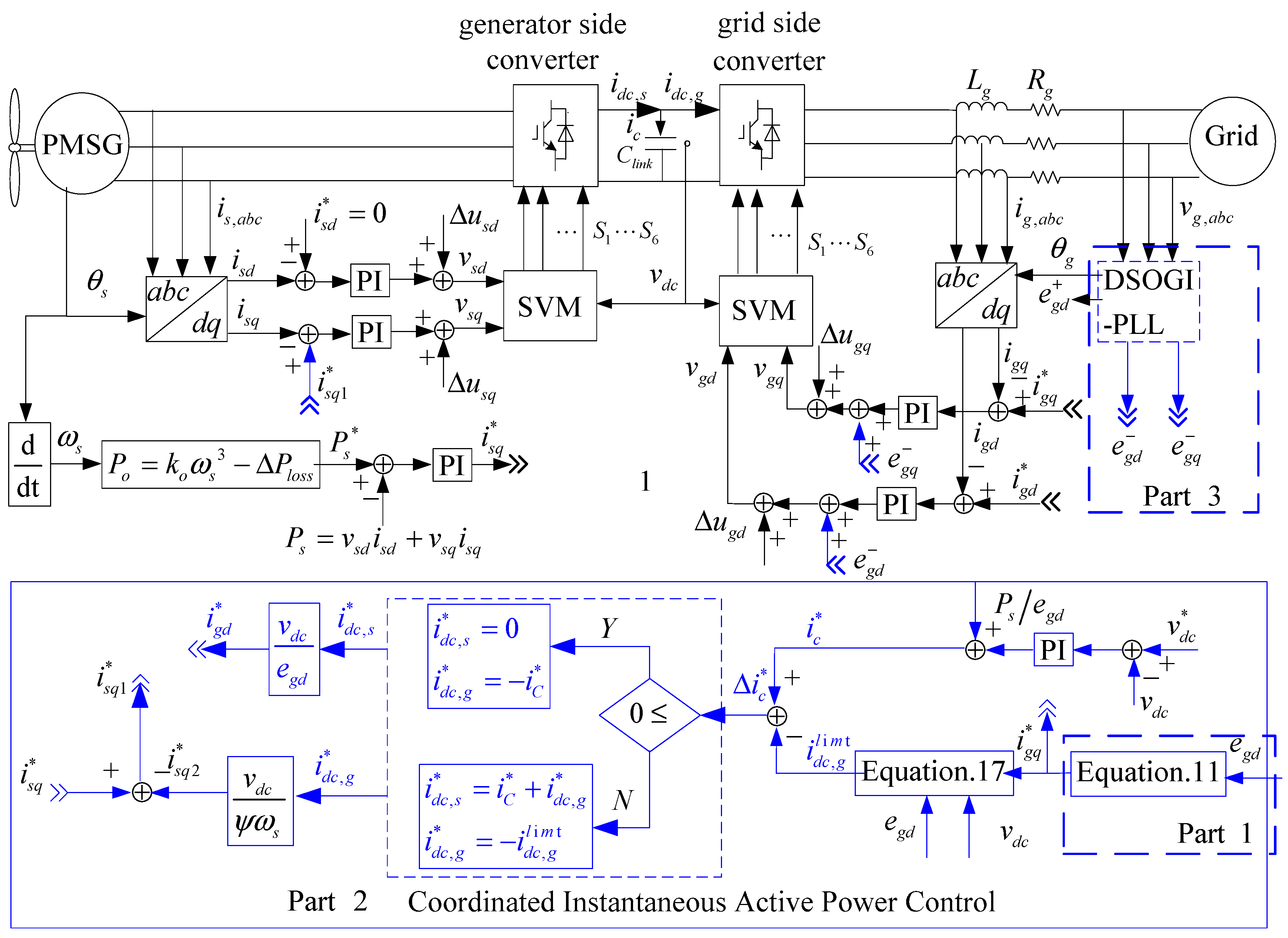
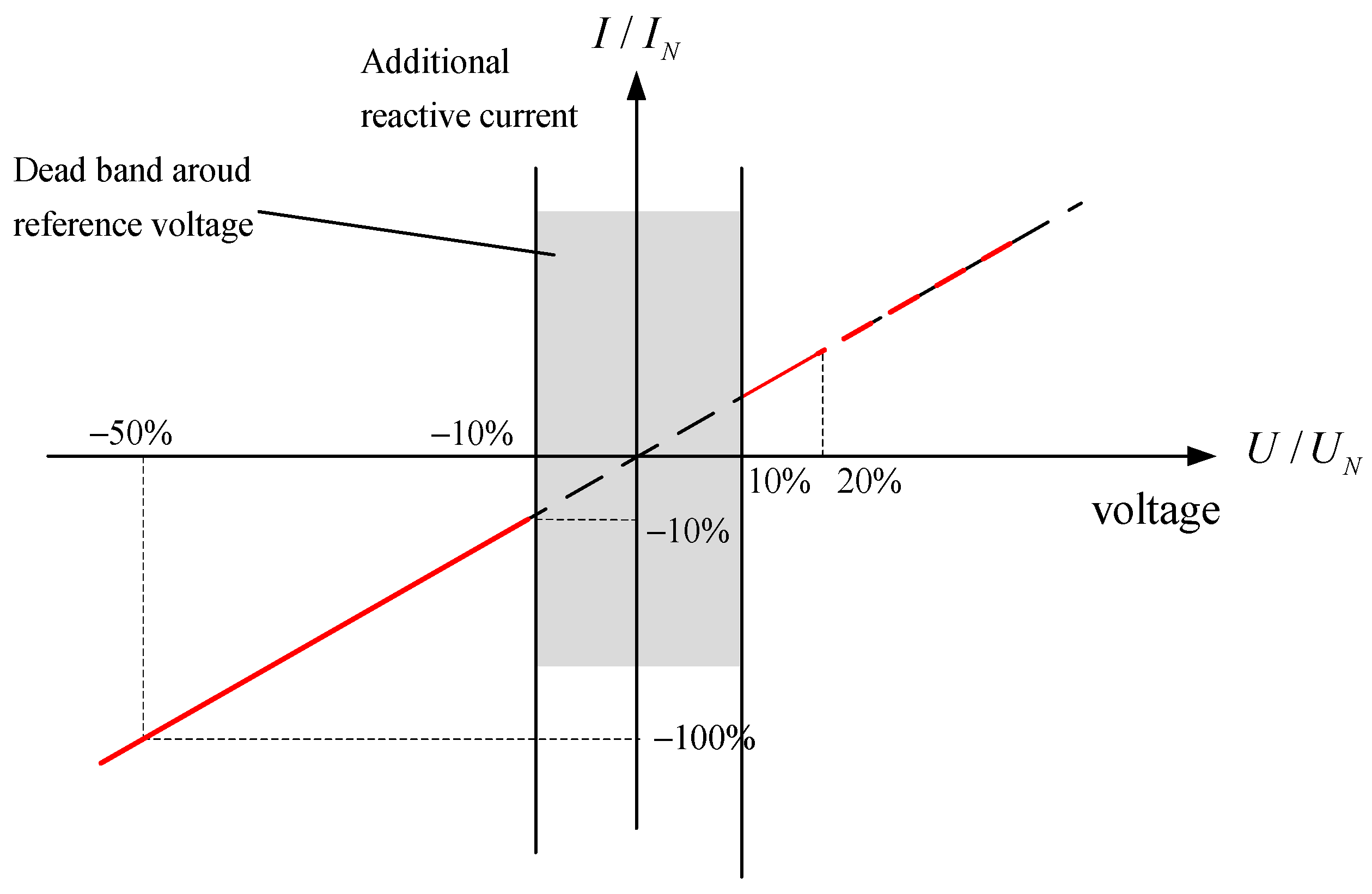
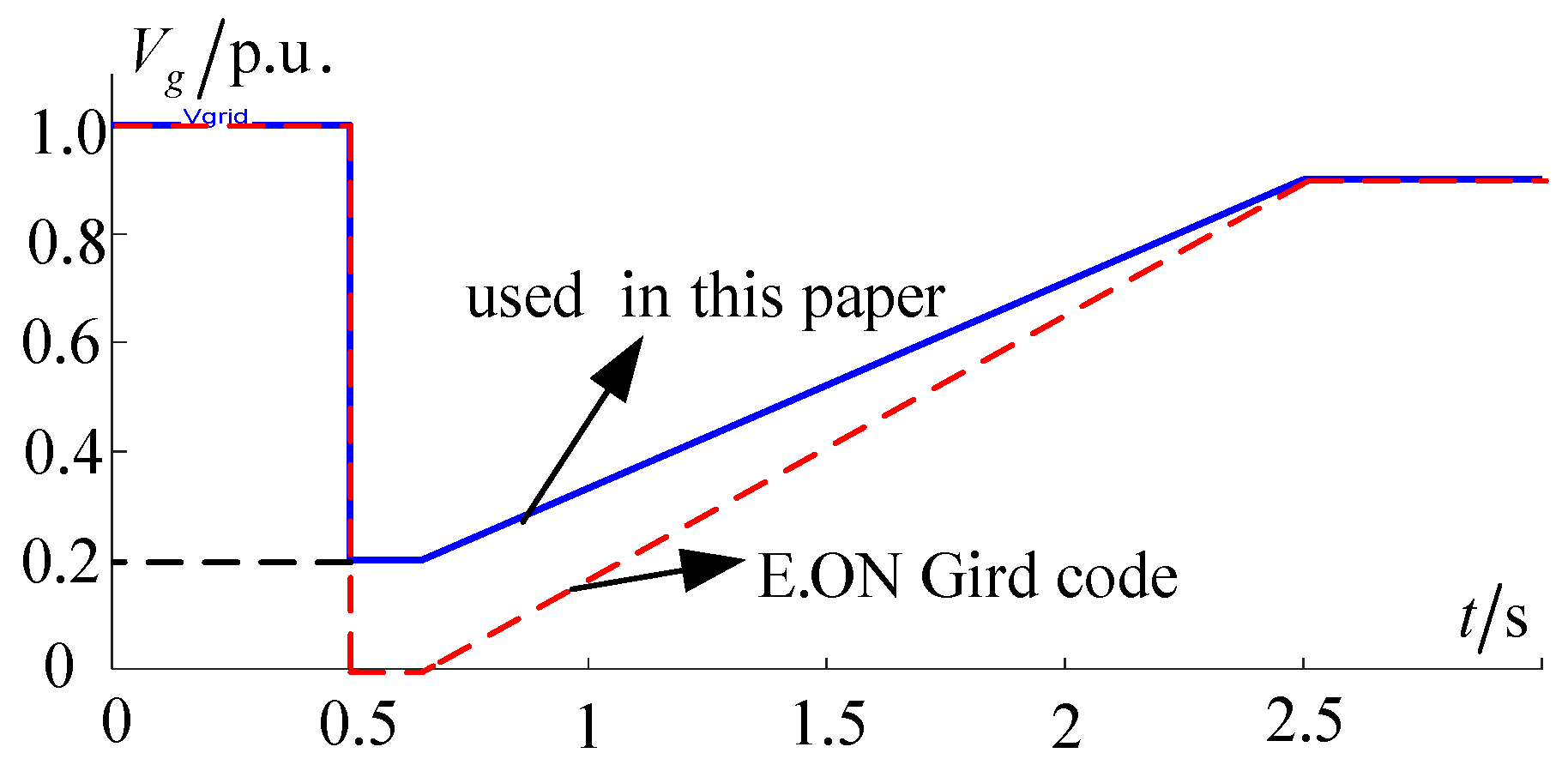
3.1. Reactive Power Support
According to E.ON’s grid connection requirements [
4], when voltage has fallen more than 10%, the wind power system has to provide 2% of the rated current for each percent of the voltage dip. A reactive power output of at least 100% of rated current must be possible if necessary, as shown in
Figure 3.
Therefore, the reactive current injected to the grid can be the formula below:
Ignoring the phase-locked loop dynamic characteristics, the d-axis component of grid voltage ed is equal to the amplitude of grid voltage, so , and UN is the rated voltage. As described above, this can, according Equation (11), set the grid side reactive current reference .
3.2. Coordinated Active Power Control
According to Formula (5), the DC current of the grid-side, generator-side converters and the DC-link capacitance current satisfy the equation:
Supposing
,
and
respectively represent the DC current reference value of the generator-side, the grid-side current and DC-link capacitance current that contribute to the DC-link voltage control, so:
Note that
,
and
are control variables and do not represent the real DC-link current. As for the conventional control strategy in
Figure 1, the generator-side converter does not respond to the DC-link voltage regulator. Therefore,
, and
;
is the output of the Proportional-Integral (PI) of the DC-link voltage regulator.
In the
Figure 2,
is divided into two parts:
and
. The DC-link regulator both uses the generator-side converter and grid-side converter to stabilize the DC-link voltage.
According to the upper limit of grid-side DC current , there are two ways to set the current reference:
- (1)
. If the DC-link-regulated current is within the grid-side converter active power capability, set , so . The DC-link regulator uses only the grid-side converter to control the DC-link voltage, and the generator-side converter still works in MPPT mode, and it avoids wind energy losses at normal operating conditions.
- (2)
. The excessive portion of
will be transferred to the generator-side converter to reduce the input active power from the generator. Namely,
, and
and
are translated into the active current references
and
using Formulas (14) and (15):
is the new reference of the grid-side d-axis current controller, and is the new reference of the generator-side q-axis current controller.
When the grid voltage sags, the reactive current provided is given higher priority than the active power injected to the grid. Thereby, the active current is restricted by:
The short time permissible over the current for the converter is usually 1.1-times the rated current [
27], namely
. According to Equation (6),
is set 1 p.u. when the grid voltage dips below 0.5 p.u. Additionally, it is easy to calculate
from Equation (11).
When the
d-axis is orientated on the grid voltage vector,
can be obtained. Therefore, the upper limit of grid-side DC current
is given:
According to Formula (17), automatically reduces with grid voltage and reactive power current. In other words, the active power current capacity decreases because of the grid-voltage dips and reactive power support requirement. When the grid voltage dips deeply, thereby along with voltage dips. The DC-link regulator will choose the second current reference set and reduce the generator torque current automatically. The grid-side converter and generator-side converter are both used to control the DC-link voltage. When the grid voltage recovers gradually, increases, and will equate to or be smaller than sometimes. The regulator chooses the first current set. The grid-side converter will regain the DC-link voltage control capability absolutely, and then, the generator-side converter operates in the maximum wind energy capture and does not intend to regulate the DC-link voltage. It does not need an outside decision to change the control mode, and all of the transitions are managed automatically.
During grid sag periods, the mismatched power between the mechanical powers acquired by the wind turbine and the electrical power output of the PMSG will be produced. Additionally, the generator speed will gradually increase, the mismatched energy stored as kinetic energy in the moment of inertia. The typical inertia time constant of a megawatt wind turbine is around 4–6 s. Considering the short time voltage dip, as describe in the E.ON grid connection requirements [
4], the generator speed will be only slightly increased and does not affect the safe operation of the PMSG system.
Compared with the conventional control strategy, the difference between the conventional and the proposed control strategy in this paper is the DC-link voltage control. Assuming that the decoupling is done by the controller, according to
Figure 2, the DC-link voltage control block diagram can be simplified as shown in
Figure 4, below.
As
Figure 4 shows a dual loop control system, the current inner control parameters should be designed first. When the system open loop transfer function is known, it is convenient to tune the parameters by the tuning control tool provided by the MATLAB software. According to
Figure 3, the system parameters in
Table 1 and the given frequency domain requirements, the bandwidth = 350 dB and the phase margin = 60. The PI2 and PI3 control parameters designed by the PID tuning control tool are given in
Table 2.
Although the DC-link voltage control outer loop interconnect with both the grid-side
d-axis current control loop and the generator-side converter
q-axis current control loop, the two currents are not really connected to the DC-link voltage outer loop at the same time. Only the grid-side
d-axis current references reach the upper limit; the generator-side
q-axis current attend to the DC-link voltage control. Then, the outer DC-link PI controller design needs to consider the grid-side inner loop or generator-side inner loop, respectively, and obtains the parameters with the trade-off of the two different inner loops. Fortunately, the dynamic characteristics of the grid-side inner loop and generator-side inner loop are similar if carefully tuned with the PI controller parameters; then it is not difficult to get the DC-link outer loop control parameters. Given that the frequency domain index approximates the bandwidth = 50 dB and the phase margin = 50°, the DC-link voltage PI control parameters are obtained and shown in
Table 1. The Bode plots and step response curves of the simplified systems with different inner current loops are shown in
Figure 5.
3.3. Negative Sequence Voltage Feed-Forward
At present, the grid connection requirements do not take into account the asymmetric voltage sag. However, single phase short circuit fault is the most common failure in power system; it is significant to the development of the control method under asymmetric voltage. For asymmetric voltage drop conditions, grid-side voltage will contain a negative sequence component. The grid-side state-space model in the negative synchronous frame [
21] is:
where
,
are the negative-sequence
d-axis grid current,
,
are negative-sequence
d-axis voltage at the grid-side converter terminals and
,
are the negative-sequence
d-axis,
q-axis grid voltages. There are two control methods usually used in asymmetry voltage conditions, which are the vector current controller feed-forward of the negative-sequence grid voltage, for which the abbreviation is VCCF (Vector Current Controller Feed-forward) in [
28], and Dual Vector Current Controllers (DVCCs) [
29].
Additionally, negative-sequence voltage feed-forward is adopted in the paper because of its simplicity. The control block diagram of VCCF is shown in
Figure 6. The current controller is implemented in the positive-sequence frame, while the negative-sequence grid voltage is the feed-forward component added to the current control output. The grid-side converter will output the same negative-sequence voltage as the grid voltage,
. According to Equation (18),
when the system is stable, only positive-sequence currents flow to the grid.
Fast and accurate online detection of the positive and negative phase-sequence is critical for VCCF. The authors have compared three sequence separation methods, such as the Low-Pass Filter (LPF) [
28], Delayed Signal Cancellation (DSC) [
28,
29,
30] and the Dual Second-Order Generalized Integrator Frequency-Locked Loop (DSOGI-FLL) [
31]. Additionally, the simulation results of these methods are presented in
Figure 7. The test voltage signals are given in Equation (19), which are three-phase sinusoidal signals included the fifth and seventh harmonic components.
Additionally, at t = 1 s, there is a phase voltage dip of 50%. Taking into consideration the performance of both steady accuracy and transient response, DSOGI-FLL seems to be a better method than the others, and it was used in the paper.
The block diagram of DSOGI-FLL is presented in
Figure 8. As shown in
Figure 8, DSOGI-FLL works in an
frame, with two SOGIs being used to compute the symmetrical components; one for
and another for
. The two SOGIs are arranged in parallel to provide the input signals to the positive/negative-sequence calculation block (PNSC), which implements the transformations given by Equation (20).
Limited by space, DSOGI-FLL is not detailed in this paper, and it can found in the literature [
31]. The control parameters
,
in
Figure 8 are set to
and 50, respectively.
where
is a 90° lagging phase-shifting operator.
5. Experimental Results
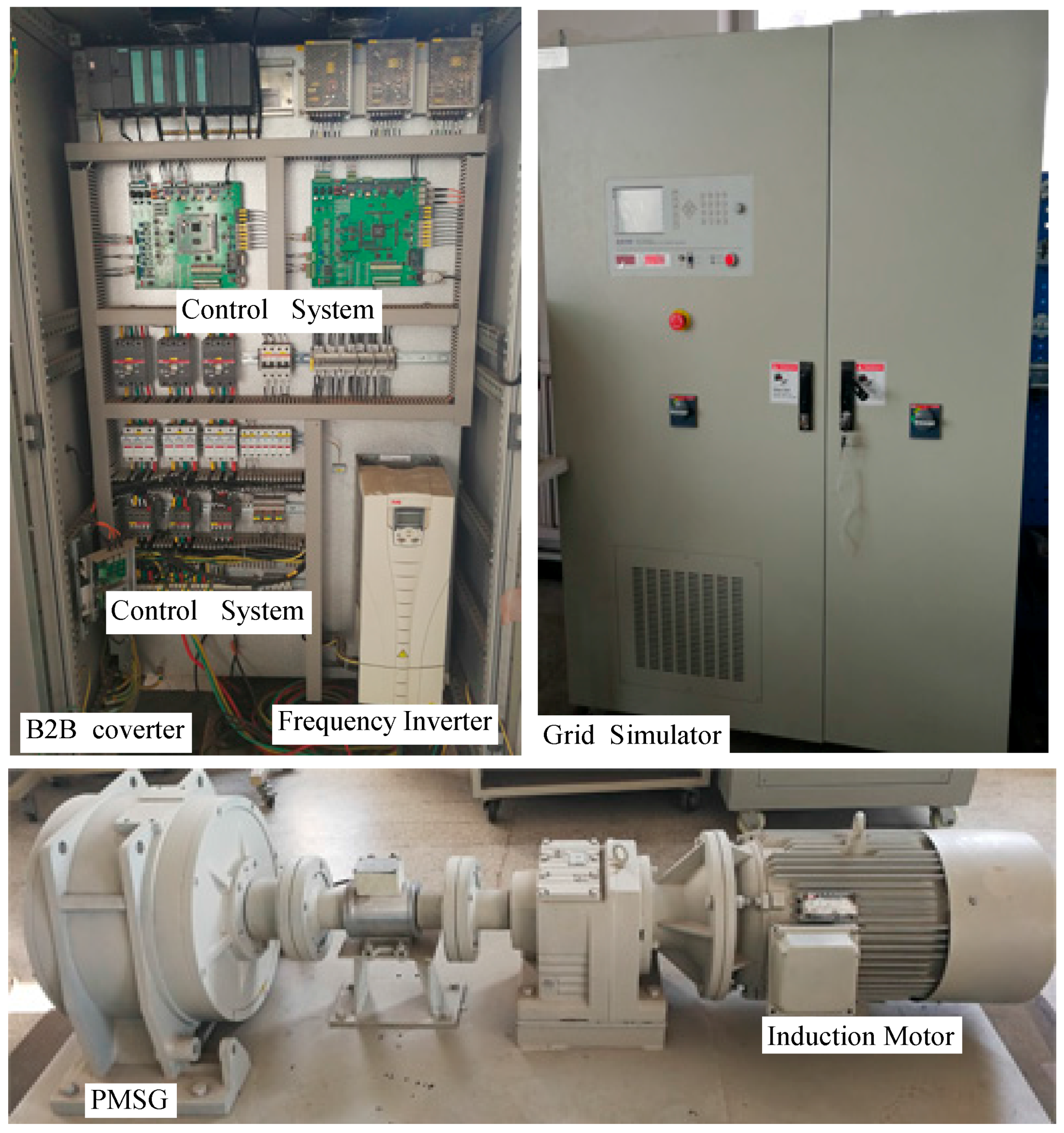
To demonstrate the validity of the proposed algorithm, the experiment has been carried out for a 10-kW PMSG wind power system (CORONA Science &Technology Company, Beijing, China). The induction motor controlled by the ABB ACS550 frequency inverter is used as a wind turbine simulator. The grid simulator used for sag generation was the PVS7030T (PARWA Technology Company, Shenzhen, China). The parameters of the experimental system are shown in
Table 3. The experimental setup is shown in
Figure 13.
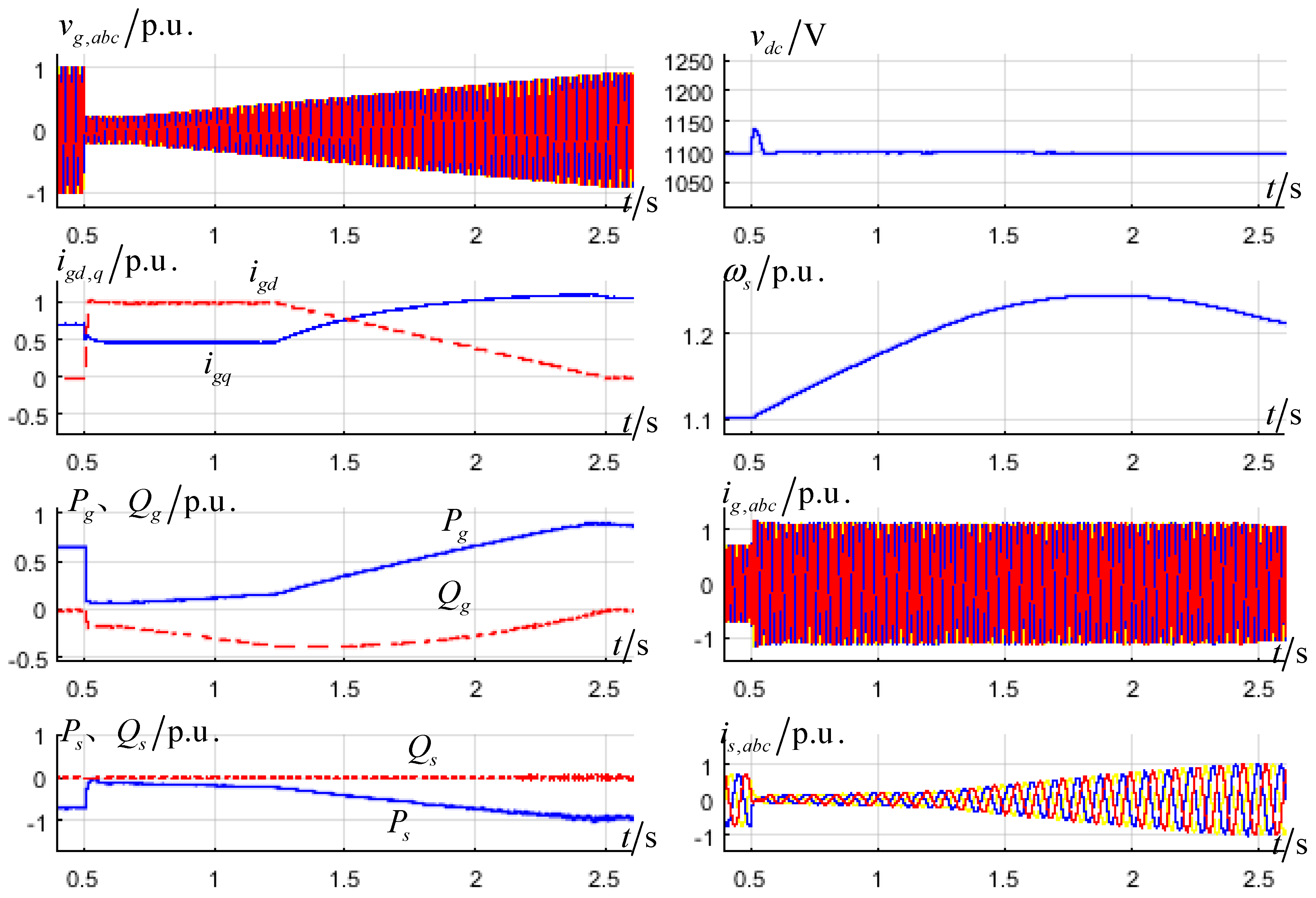
In accordance with the simulation cases, symmetrical and unsymmetrical voltage dips are tested. Because of the low rotational inertia, the experiment system cannot withstand long time voltage sags. Therefore, the design scenario is changed, that is: grid voltage drops 80%, lasting 500 ms. The experimental results are shown in
Figure 14.
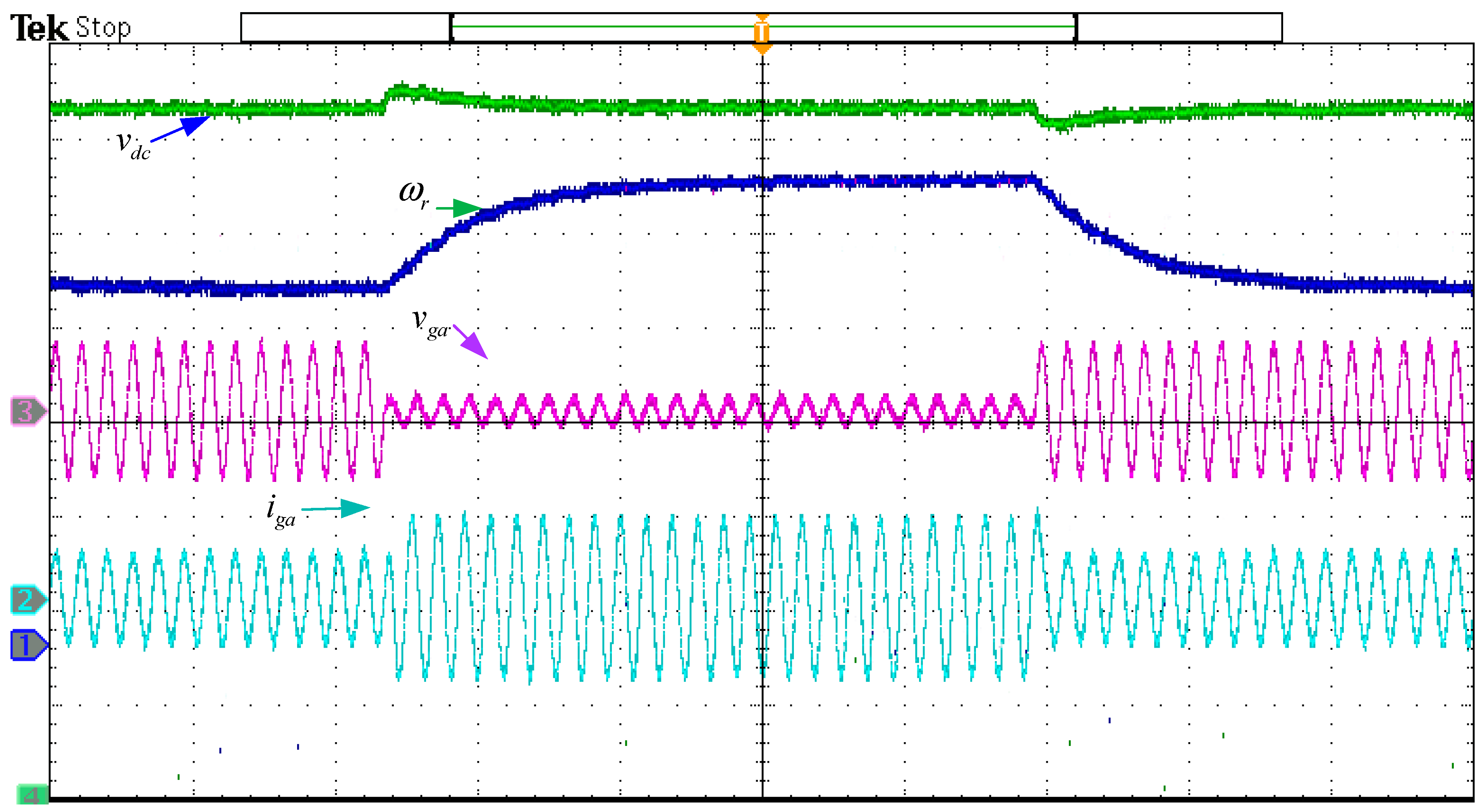
Seen from
Figure 14, when grid-voltage dips, DC-link voltage rises about 1235 V and recovers to 1200 V. The grid current increases, but mainly is the reactive component. By the influence of the generator-side active power decrease, the rotor speed continues the PMSG increase during the grid-voltage sag period. When grid voltage recovers, the system automatically transits to the maximum wind energy capture mode. Mechanical speed decreases and is gradually restored to the optimal speed.
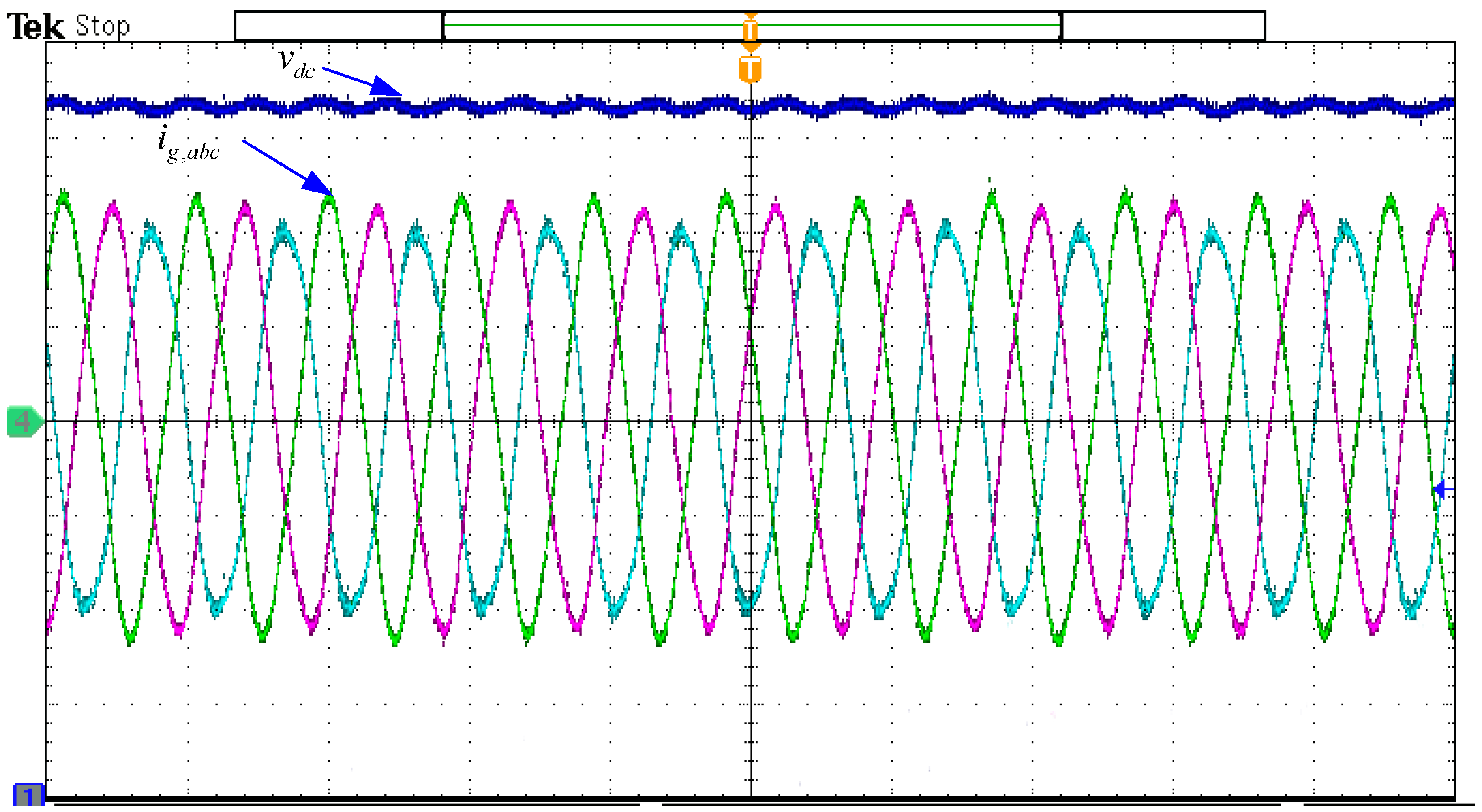
Similar to the simulation Scenario, phase a grid voltage is set to drop to 50; the experimental results with and without negative voltage feed forward control are shown in
Figure 15 and
Figure 16, respectively.
The experimental results in
Figure 15 and
Figure 16 are similar to the simulation results in
Figure 12. DC-link voltage appears twice in the grid-voltage frequency fluctuations under the asymmetry conditions, with or without negative voltage feed forward. The grid-side current maintains symmetry when adding negative feed-forward voltage.
6. Conclusions
In this paper, an improved LVRT coordinated control strategy for the PMSG-based wind power system is proposed. The proposed controller combines the power control capabilities of the generator-side and grid-side converters. When the grid voltage dips deeply and the DC-link voltage cannot be controlled by the grid-side converter, the proposed controller will automatically reduce the input power form the generator to control the DC-link voltage. Additionally, when the grid voltage recovers, the controller also automatically transits to normal control mode, and the external criterion is not needed. The coordinated control strategy enhances the DC-link voltage control capabilities during the grid voltage dips.
For asymmetrical voltage dips, a negative-sequence voltage feed-forward method was adopted. The DSOGI-FLL method is used to separate the negative-sequence component. Additionally, the negative-sequence component as the feed-forward is added at the controller output to keep the grid-side current symmetry under asymmetry voltage conditions. The reactive power injected into the grid according to the E.ON grid code is also designed in this paper. The effectiveness of the proposed control strategy has been validated by both simulation and experimental results.
In this paper, only LVRT for the PMSG-based wind power system is discussed. However, in the E.ON grid code, there are other grid connection requirements for wind power systems, such as high voltage ride-through and active power regulation when there is grid frequency fluctuation, which are the focus of future work.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}