1. Introduction
The need for fuel-efficient road transport has largely driven the development of new automotive technology and research over the last decades. A well-known and promising development is the hybrid powertrain that, typically, consists of an internal combustion combined with an electric machine and a high-voltage battery. The electric machine can recover (some of) the brake energy, which is then stored in the high-voltage battery. The stored energy can later be used to provide propulsion power so that the power needed from the internal combustion engine is reduced and the engine can be operated at a more efficient operating point. An energy management strategy is essential to control these energy flows while maximizing the efficiency. However, the energy flows in a vehicle are not limited to the energy flows needed for propulsion. Heavy-duty vehicles in particular tend to have many subsystems on board to support the functionality of the vehicle, which can consume a significant amount of energy, a refrigerated semi-trailer and an air supply system being notorious examples. The optimization of all of these energy flows individually does not automatically guarantee optimal energy efficiency at the vehicle level. Therefore, a holistic system approach is needed, i.e., complete vehicle energy management (CVEM; [
1]). The broad range of functionalities for heavy-duty vehicles has led to many different powertrain configurations augmented with different auxiliary subsystems. This requires CVEM to handle the growing complexity with the number of subsystems, while at the same time, it needs to be flexible for the many different configurations that exist for a heavy-duty vehicle. Indeed, developing a new energy management strategy for each vehicle configuration is time consuming and very expensive.
Many different solution strategies for solving the energy management problem have been proposed over the past decades. The proposed solution strategies can be divided into so-called offline and online solution strategies [
2,
3]. Offline solution strategies have been developed based on, e.g., dynamic programming (DP; see, e.g., [
4,
5,
6]), Pontryagin’s minimum principle (PMP; see, e.g., [
7,
8,
9,
10]) or convex optimization (see, e.g., [
11,
12]). The offline solution strategies require all disturbances to be known (e.g., the driving cycle) so that the global optimal solution can be computed and can therefore not be implemented in real time. Still, they do provide a benchmark for online solution methods and are therefore valuable tools.
Examples of online solution strategies that are real-time implementable are rule-based strategies (see, e.g., [
13,
14]), equivalent consumption minimization strategies (ECMS; see, e.g., [
15,
16,
17]) and solution strategies based on model predictive control (MPC; see, e.g., [
18,
19,
20]). The MPC strategies are interesting as they naturally take prediction information into account. The prediction information can be stochastic as in [
21,
22] or deterministic as in [
18,
19,
20,
23,
24,
25]. The future power demand for the deterministic MPC strategies can be predicted as a function of the current power demand, e.g., the power demand is exponentially decaying in [
23,
24] and held constant in [
25]. The future power demand can also be predicted with a vehicle model and road preview information, as in [
18], or it can be assumed that the future power demand is exactly known, as in [
19,
20]. The choice of the cost function also leads to many variations in MPC strategies. The cost function generally weights the fuel consumption, with or without additional terms penalizing the final state, the state deviations and the size of the control inputs, which leads to many penalizing parameters.
While the aforementioned online solution strategies might be able to handle the complexity of the CVEM problem, the flexibility of these strategies is poor. Rule-based strategies require a new set of rules for every subsystem that is added to the CVEM problem; ECMS requires tuning of an equivalence factor for each additional state in the CVEM problem; and MPC requires reformulating the optimal control problem, the cost function and tuning of the penalizing parameters each time a subsystem is added. To enhance the flexibility of vehicle energy management, a distributed offline solution strategy is proposed in [
26], and online solutions are proposed in [
27,
28,
29]. In [
27], an online game-theoretic approach to CVEM is presented, but prediction information is not taken into account. In [
28], an online game-theoretic approach in combination with MPC is presented, which does utilize prediction information, but requires solving a nonlinear program. In [
29], flexibility is obtained by using the Alternating Direction Method of Multipliers (ADMM), while ideas based on ECMS are used to provide the equivalent costs at a supervisory level. While each of these solution strategies is interesting and provides a certain degree of flexibility, they require still a significant amount of tuning, while real-time implementability is not guaranteed.
In this paper, we propose to use distributed economic MPC [
30,
31,
32] to solve the CVEM problem. In particular, we define the optimal control problem over a receding horizon and apply a dual decomposition to this optimal control problem, as we proposed in [
33], which uses the framework presented in [
26]. The application of the dual decomposition results in small-sized linearly-constrained quadratic programs (LCQP) for each of the subsystems, which can be efficiently solved in real time with embedded LCQP solvers. The optimal control problem is then solved at each time instant
over a horizon of
N samples after which only the decisions at the time instant
k are implemented. The conventional cost function in MPC is generally chosen as a quadratic performance index, which is a measure of the predicted deviation of the error between the states and inputs from their corresponding steady-state values, as was done in the context of energy management in, e.g., [
23,
24,
25]. For CVEM, the cost function follows from the desire to minimize the energy losses in the vehicle. Therefore, we will adopt the terminology as in [
30], which uses economic MPC, as forcing the system to operate around a pre-specified steady-state value is not necessarily the most efficient.
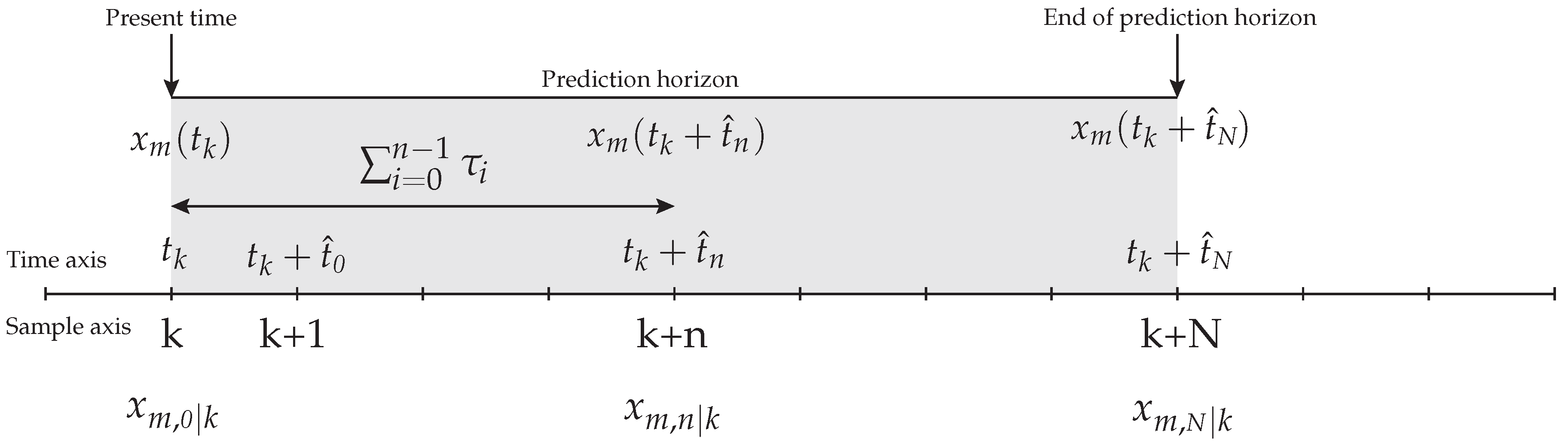
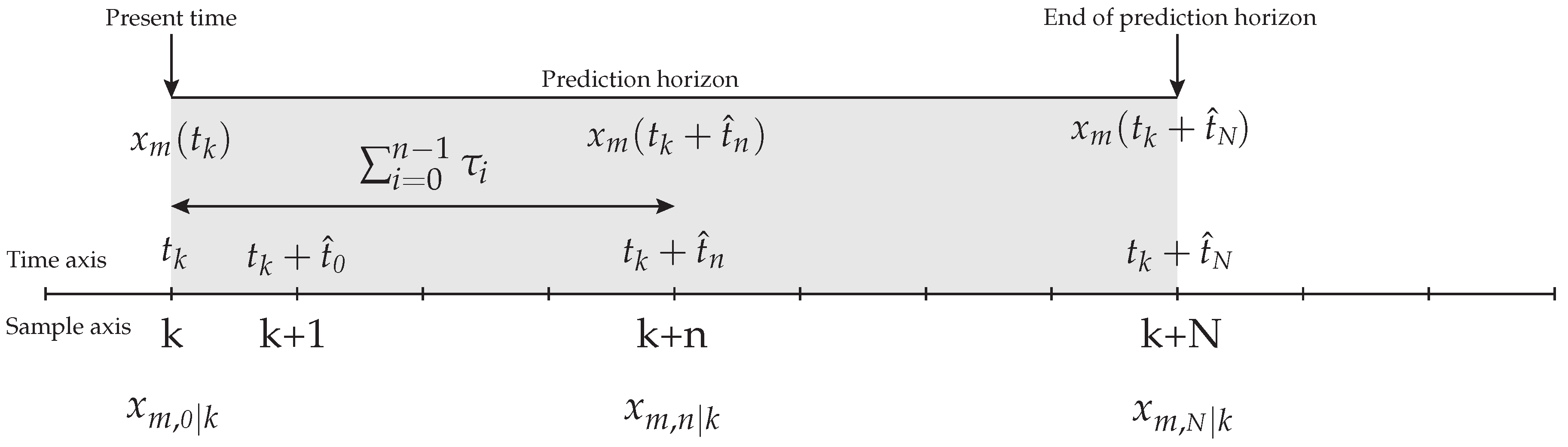
Choosing the length of the prediction horizon for economic MPC is a delicate decision. On the one hand, the need for soft final state constraints to be added to the cost function, as is done in, e.g., [
23], can be avoided by taking a long prediction horizon. On the other hand, the number of decision variables is typically proportional to the length of the prediction horizon, which leads to a preference for short prediction horizons to allow for real-time implementation. Therefore, we will use variable prediction time intervals that allows long prediction horizons with a limited number of decision variables. These were first introduced in [
33].
Contrary to [
33], in this paper, we present the general CVEM problem as a quadratically-constrained linear program (QCLP). This allows the method to be applied to various vehicle configurations. Furthermore, we will introduce a novel control concept that allows the control of auxiliaries that can only be turned on or off. This concept relaxes the use of binary (on/off) decision variables to continuous decision variables over the entire horizon, except for the first time instant, where the decision variable is actually binary. Recall that in MPC, this is the only control input that is actually implemented. This allows the relaxed control problem to be formulated as the minimization of two solutions to a LCQP, where one LCQP is solved under the assumption that the first decision is set to “on” and one LCQP is solved under the assumption that the first decision is set to “off”. The solution with the lowest total cost of the two is then the optimal solution. Finally, to fully demonstrate the performance of the distributed economic model predictive control (DEMPC) approach, the approach is validated on a low-fidelity vehicle model and a high-fidelity vehicle model of a hybrid truck with an internal combustion engine, an electric motor, a high-voltage battery, a refrigerated semi-trailer, an air supply system, an alternator, a direct current to direct current (DCDC) converter, a low-voltage battery and a climate control system. In doing so, the disturbances over the prediction horizon are assumed to be known exactly for the low-fidelity vehicle model. This excludes the influence of faulty prediction information and allows a thorough analysis of the algorithm. For the high-fidelity vehicle model, a prediction algorithm is developed that allows future disturbances to be predicted and is used together with the DEMPC approach to truly demonstrate the fuel reduction potential of the DEMPC approach to CVEM in a realistic simulation environment.
The outline of this paper is as follows. The vehicle energy management problem is defined in
Section 2. The distributed model predictive control approach is given in
Section 3. In
Section 4, the prediction method for the disturbances is given, and the simulation results on the low-fidelity vehicle model are given in
Section 5. Some important conclusions will be drawn in
Section 6.
2. Vehicle Energy Management Problem
In this section, we will present the convex approximation of the complete vehicle energy management (CVEM) problem. In particular, we will use a power-based modeling approach which allows the CVEM problem to be formulated through the input and output powers of each subsystem and by the state dynamics for some of the subsystems.
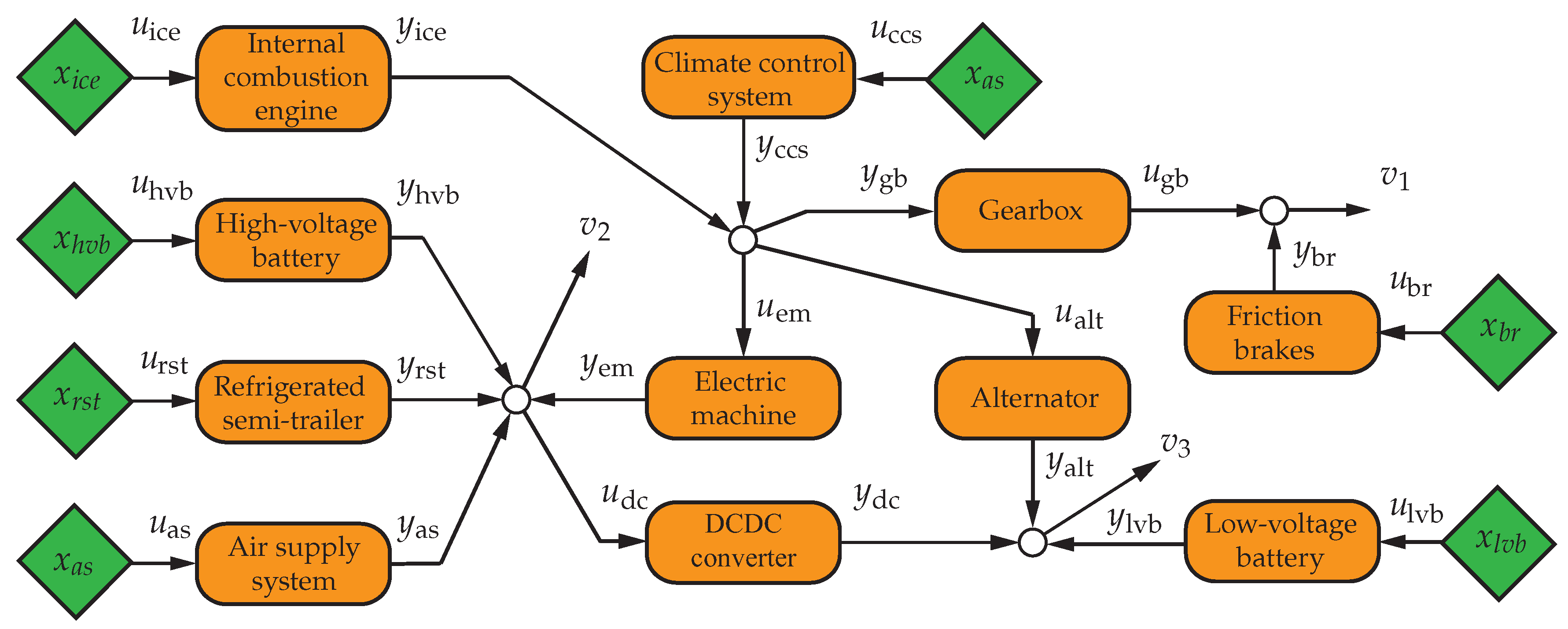
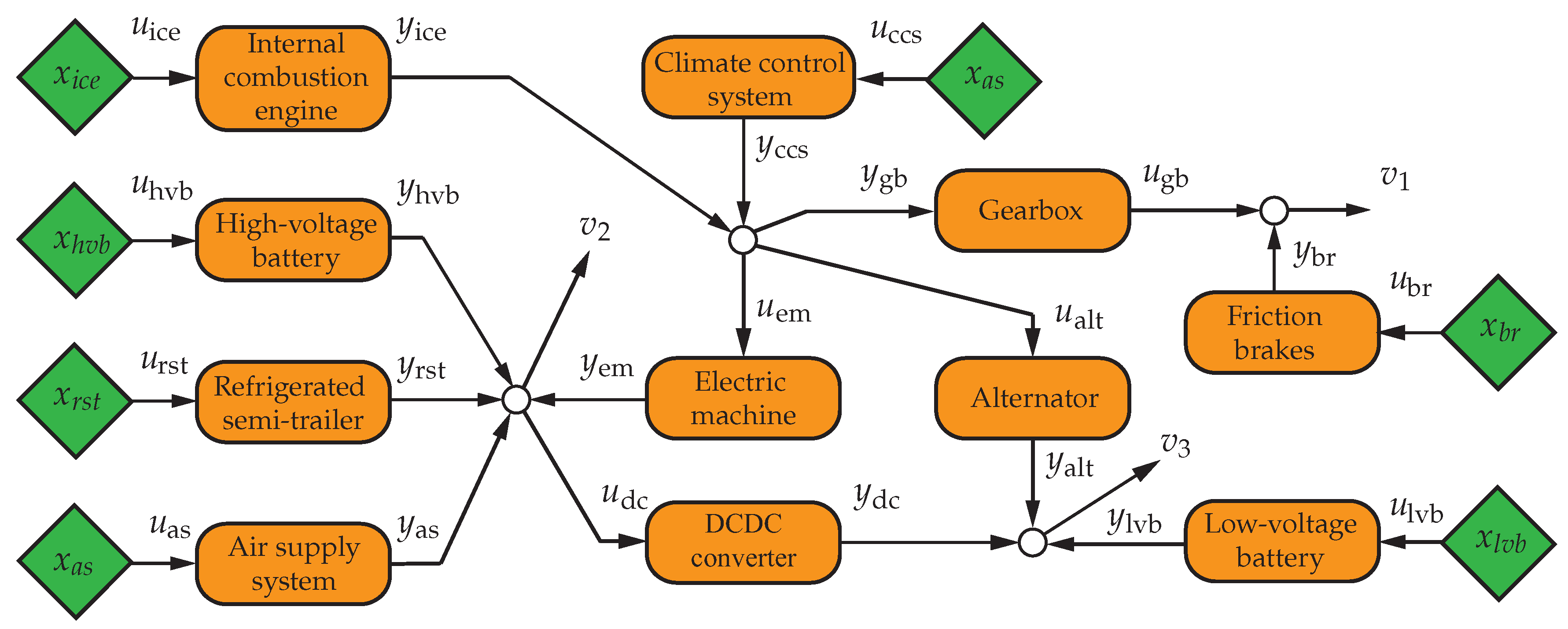
To demonstrate the flexibility of the power-based approach, we will consider a heavy-duty vehicle with several auxiliary systems, as schematically shown in
Figure 1. The considered vehicle topology includes an internal combustion engine, an electric machine, an alternator, a high- and low-voltage battery, a refrigerated semi-trailer, an air supply system, a DC/DC converter, a climate control system, a gearbox and mechanical friction brakes. In this figure,
is the (scalar) input power and
is the (scalar) output power for
. Furthermore,
is the state for subsystem
that represents the energy in the energy storage devices, which is only present for the dynamic subsystem
, i.e., the high-voltage battery, the low-voltage battery, the refrigerated semi-trailer, the air supply system and the climate control system.
2.1. Objective and Topology
The objective in energy management is to minimize the cumulative fuel consumption, i.e.,
for
, where
is the fuel consumption rate that needs to be determined subject to all of the constraints acting on the vehicle and the subsystems in the vehicle. The constraints and subsystem models will be developed below. The fuel consumption of the engine typically depends on the engine output power and engine speed, i.e.,
, where the engine output (i.e., mechanical) power at time
is defined as:
where
is the engine torque at time
t and
is the engine speed at time
. We can also define the engine input (i.e., fuel) power by:
where
is the constant lower heating value of the fuel in
. The definition of the engine input power allows (
1) to be rewritten in a more general expression of minimizing the energy consumption, i.e.,
which has the same optimal solution as (
1) because
is a positive constant. In (3), the engine input power is a function of the engine output power and engine speed, i.e.,
for which an approximation is given in
Section 2.2.1. Indeed, each of the subsystems in the heavy-duty vehicle can be expressed in terms of their input and output power as is shown in
Figure 1. We will assume that the power losses in the gearbox are negligible, i.e.,
, so that the two nodes connected via the gearbox can be lumped together, and the remaining three nodes in the topology where power is aggregated can be described by:
where (
4a) gives the aggregation of mechanical power at the mechanical side of the topology, (
4b) gives the aggregation of high-voltage power at the high-voltage side of the topology and (
4c) gives the aggregation of low-voltage power at the low-voltage side of the topology. In (4),
,
and
are the disturbances acting on each node, which are the power required to follow a specified velocity profile, the power required for unmodeled high-voltage loads and the power for unmodeled low-voltage loads, respectively. These disturbance are predicted with the method presented in
Section 4.
To complete the vehicle model for the topology given in
Figure 1, a model is required for each of the subsystems that describes the input power
, the output power
for
and the state
for
.
2.2. Subsystem Models
For each of the subsystems in the heavy-duty vehicle, the relation between the input and output power (
,
) is approximated with a quadratic equality constraint, i.e.,
with (time-dependent) efficiency coefficients
,
and
. The input power is constrained to:
for
, where
is the set with the indices of the subsystems that can receive a continuous input power setpoint. The input power is constrained to:
for
, where
is the set with the indices of the subsystems that can only receive a discrete input power setpoint, e.g., the refrigerated semi-trailer can only be turned on or off. Furthermore, we model the energy in the subsystems with a linear differential equation of the form:
for all
and with specific matrices
,
,
and disturbance
. The energy stored inside the subsystem
is constrained to:
for
. We will show below that each of the subsystems in the heavy-duty vehicle can be modeled in either of the forms (5).
2.2.1. Internal Combustion Engine, Electric Machine and Alternator
Similar to the definitions of input and output power of the internal combustion engine, given by (2), the input and output powers of the electric machine and alternator are defined as:
respectively. In these equations,
is the electric machine torque,
is the electric machine and alternator speed, which is proportional to the internal combustion engine speed,
and
are the voltages of the high- and low-voltage board net, respectively, and
and
are the current flowing through the electric machine and alternator, respectively.
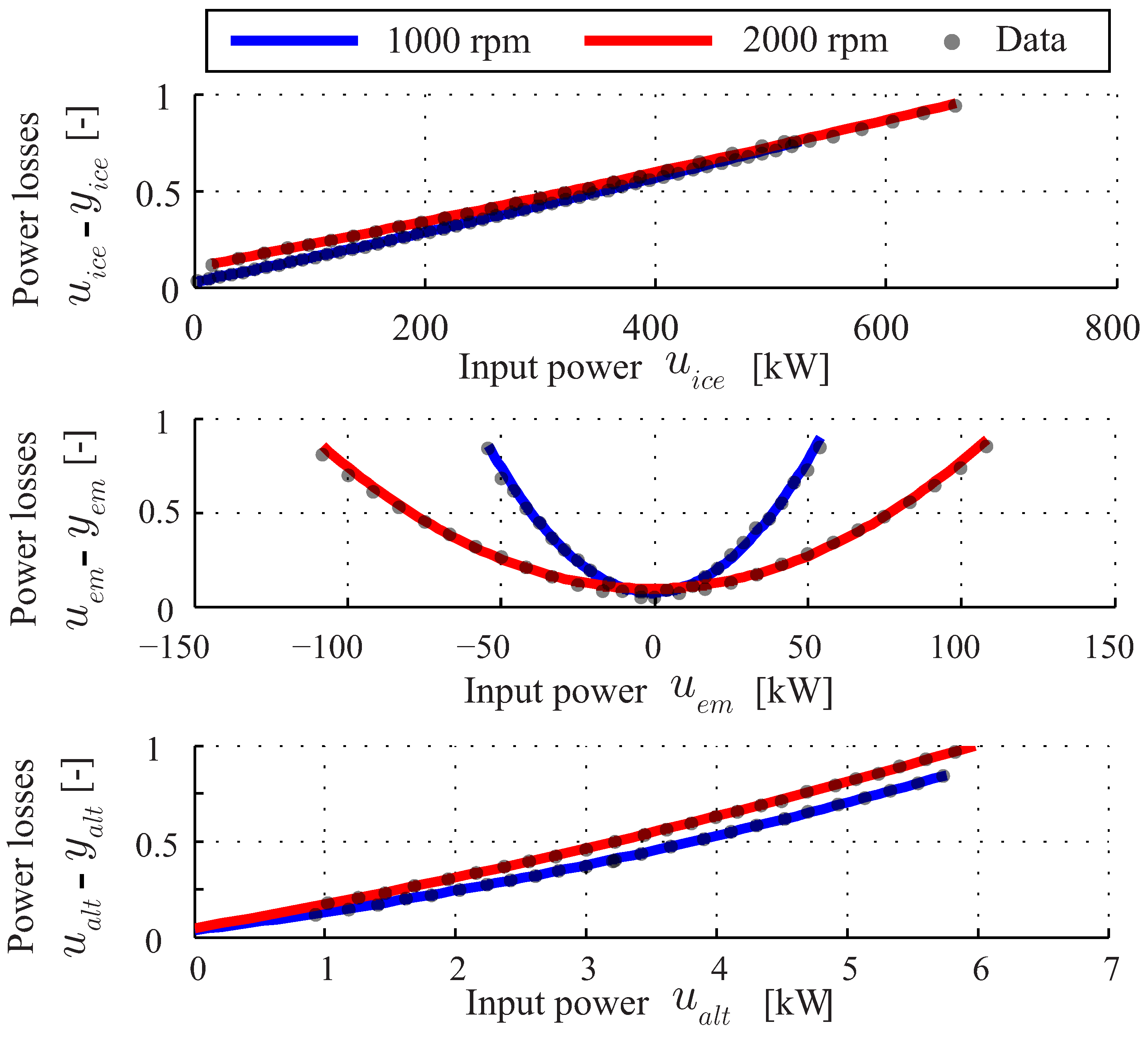
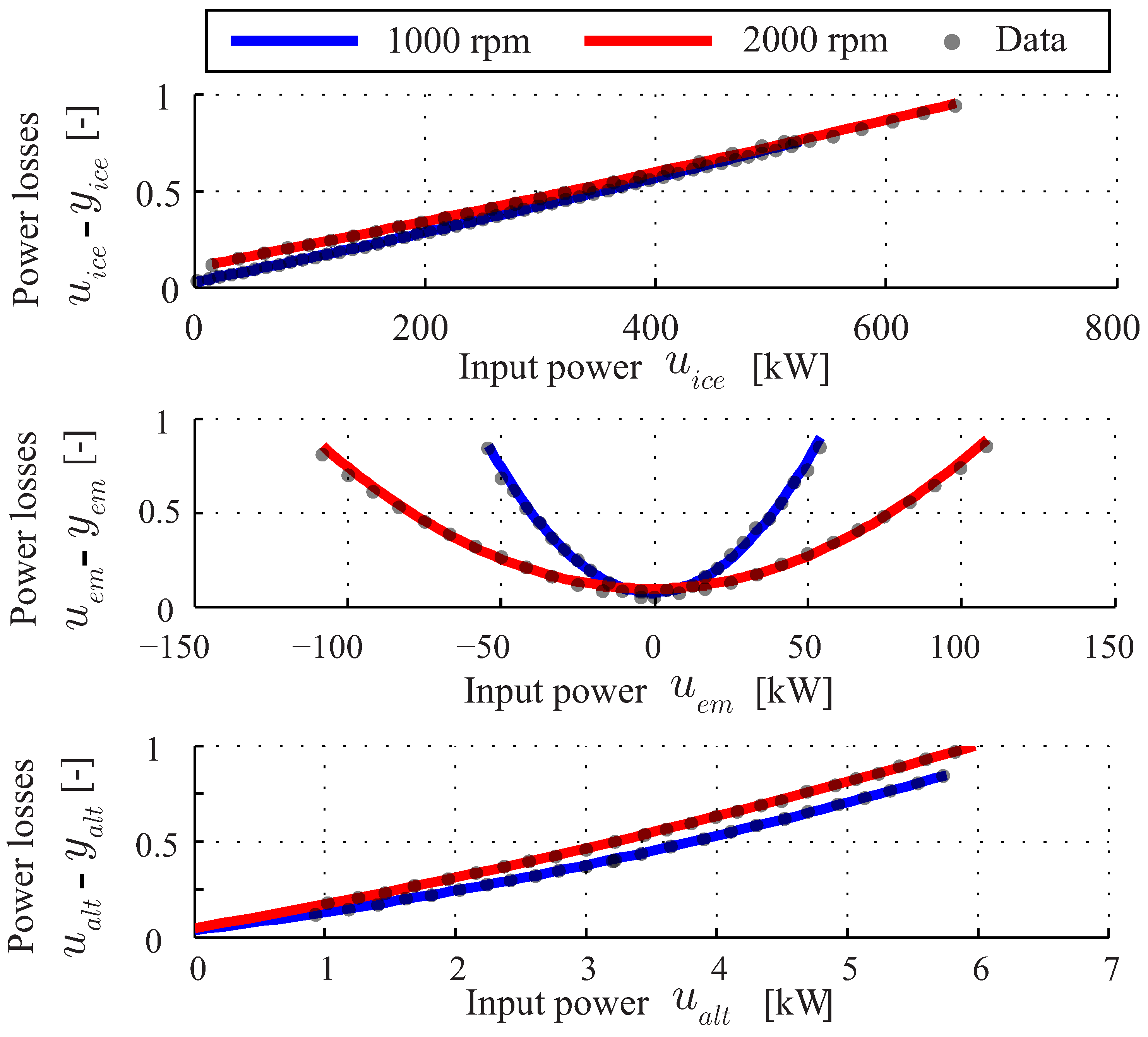
With these definitions, the input-output power behavior of the internal combustion engine, the electric machine, and the alternator can be described by (
5a), where the efficiency coefficients typically depend on the engine speed
, i.e.,
The accuracy of the quadratic approximation (
5a) with (
7) of these components is shown in
Figure 2 for two engine speeds. The input power
is constrained to (
5b) for
where the minimum and maximum input power also typically depend on speed
.
2.2.2. DCDC Converter and Mechanical Brakes
The input and output power of the DCDC converter is defined by:
respectively, where
is the DCDC current at the high-voltage side,
is the DCDC current at the low-voltage side. The mechanical brakes are available for the case that not all energy can be recuperated by the other subsystems due to constraints. The output power
is dissipated and a physical origin of the input and output power is therefore not necessary. Still, the input-output behavior for both, the DCDC converter and mechanical brakes, can be described by (
5a) for
with efficiency coefficients
,
and
for
that do not depend on speed. The input power is constrained to (
5b) for
where the minimum and maximum input power do not depend on speed.
2.2.3. High- and Low-Voltage Battery
The vehicle under consideration has a high-voltage battery connected to the high-voltage network and a low-voltage battery connected to the low- voltage network. The models of the high- and low-voltage battery are derived from a battery equivalent circuit model, i.e., an open circuit voltage
for
in series with a resistance
for
(see, e.g., [
2]), which lead to an input-output behavior given by (
5a) with
,
and
for
, which is bounded by (
5b) for
. The amount of energy in the high- and low-voltage battery, i.e.,
for
satisfies (
5d) for
with
,
,
and
for
and is constrained to (
5e) for
. It should be noted that the models used in this paper can be extended to have charge acceptance limitations. However, in [
34], it has been shown that this does not lead to a significantly different energy management strategy.
2.2.4. Refrigerated Semi-Trailer
The thermal dynamics of the air inside the refrigerated semi-trailer is modeled using an energy balance given by:
where
is the thermal capacity of the air in the refrigerated semi-trailer,
is the air temperature,
is the thermal power flowing into the refrigerated semi-trailer where negative powers indicate cooling,
is a heat transfer coefficient between the ambient temperature
and the air temperature and
is an insulation coefficient. It is assumed that the temperature of the cargo remains within acceptable bounds as long as the air temperature remains within acceptable bounds. We can represent the refrigerated semi-trailer model in terms of stored energy by defining the thermal energy relative to the ambient temperature, i.e.,
so that the thermal energy satisfies (
5d) for
with
,
,
and
where the thermal energy is constrained by (
5e) for
.
The relation between the input and output power is approximated with (
5a) for
with suitable choices of
,
and
and is constrained to (
5c). The thermal power is not continuous with this constraint and this set is not a convex set, which is not attractive for optimal control. Therefore, a convex approximation is obtained by assuming (
5c) holds instead of (
5b) for
and a solution for taking into account (
5c) is proposed in
Section 3.3.
2.2.5. Air Supply System
To limit the amount of states in the air supply system, the air vessels of the air supply system are lumped into one vessel with a lumped volume
V and air pressure
. The dynamics of the air pressure in the lumped system are assumed to satisfy a mass balance (see, e.g., [
28]) given by:
where
R is the specific gas constant for air,
V is the lumped volume of the air tanks,
is the mass flow into the air vessels with air temperature
and
is the mass flow out of the air vessels with air temperature
. We can represent the air supply model in terms of stored energy by defining the pneumatic energy relative to the ambient pressure
where
is the ratio of specific heats (approximately 1.4 for air). Furthermore, we define the pneumatic input power by
so that the pneumatic energy satisfies (
5d) for
with
,
,
and
and where the pneumatic energy is constrained to (
5e) for
.
As with the refrigerated semi-trailer, the input power is approximated with (
5a) for
with suitable choices of
,
and
and is constrained to (
5c) for
. Again, a convex approximation is obtained by assuming (
5c) holds instead of (
5b).
2.2.6. Climate Control System
As in [
35], only the evaporator in the climate control system is modeled, which is assumed to satisfy a set of coupled thermal energy balances given by:
where
and
are the heat capacities of the refrigerant and the walls of the evaporator, respectively,
and
are the temperatures of the refrigerant and walls of the evaporator, respectively,
is the effective cooling power from the compressor,
is the ambient temperature,
and
are the heat transfer coefficients between the inner and outer walls of the evaporator, respectively and
is the heat generated when the inlet air is condensed (latent heat), which is assumed to only depend on the ambient air temperature and humidity
. Similar to the battery, we can represent the climate control system model in terms of stored energy by defining the thermal energy in the wall and refrigerant relative to the ambient temperature, i.e,
which satisfies (
5d) for
with:
and
. The energy in the climate control system is constrained to (
5e) for
. The relation between the input and output power is approximated by (
5a) for
with suitable choices of
,
that depend on the ambient temperature
and internal combustion engine speed
and
and is constrained to (
5c) for
. Again, a convex approximation is obtained by assuming (
5c) holds instead of (
5b).
The convex approximation of the CVEM problem is now fully defined by the objective, the topology constraints, and the dynamics and constraints acting on each subsystem of the vehicle. In the next section, we propose to make a discrete time approximation of the CVEM problem with a prediction of the disturbances that is solved via a distributed model predictive control approach.
4. Prediction of Disturbance Signals with ADASIS
In order to solve the CVEM problem with the DEMPC approach, accurate predictions of the disturbances
,
, and
, as in (
15c) and (
15f), are needed, as well as time varying efficiency constants in (
15b), which requires an accurate prediction of the engine speed
. In this paper, we assume that all disturbances at the energy storage buffers are constant (i.e.
for all
and
) and measurable, e.g., the ambient temperature of the refrigerated semitrailer, see
Section 2. Furthermore, we assume that the high-voltage network has no disturbances, i.e.,
for all
and
and the disturbance power on the low-voltage network (consisting of e.g., the power needed for the head lights) is identified online. The latter is done by considering the optimal solution at time instant
and finding the value
, for
that satisfies (4). As a result, we only need a method to obtain an accurate prediction of the propulsion power
, i.e., the power needed at the wheels for tracking a reference velocity and the engine speed
.
4.1. Power Required at the Wheels
The propulsion power
and the engine speed
at prediction step
at time
are obtained by averaging the prediction of the propulsion power and engine speed, i.e.,
for
with
,
, and
. The propulsion power and engine speed depend on the road slope
, the vehicle speed
and the selected gear
and can be predicted using a simple longitudinal vehicle model (see, e.g., [
3]). In particular, we predict these quantities using:
where
is the combined gearbox and differential ratio that depends on the selected gear
,
is the dynamic wheel radius,
is the (predicted) vehicle speed,
m is the vehicle mass,
is the equivalent inertia of the drive line at the wheels as function of the selected gear,
g is the gravitational constant,
rolling resistance coefficient of the tires,
A is the frontal area,
is the air drag coefficient and
is the air density. It is assumed that all constants are known, or can be estimated online using techniques presented in [
39,
40,
41,
42]. The time dependent road slope
, vehicle speed
and gear selection
, however, need to be predicted for
.
4.2. Prediction Algorithm
The road slope can be predicted with an e-horizon system, such as the advanced driver assistance system ADASIS, see [
43], which gives a vector of road slopes over the relative distance
to the current position of the vehicle, i.e.,
. Prediction of the velocity
is more difficult. Nevertheless, since we consider long-haul heavy-duty vehicles, which spend most of their time on the highway, we can assume that the cruise control (CC) or the downhill speed control (DSC) is active during most of the driving. In this case, the desired velocity of the vehicle is regulated towards
for cruise control and towards
for downhill speed control. Typically, it holds that
, i.e., the DSC speed is higher than the CC speed, which allows some of the potential energy to be stored as kinetic energy. Finally, a rule-based gear shift strategy is assumed that satisfies:
were
is the constant lower threshold for gear shifting, respectively. This strategy seeks always the highest gear for which the minimum engine speed is satisfied, which corresponds generally with the most efficient gear shift strategy. The propulsion power is constrained as well:
where
and
are the lower and upper bound that depend on the vehicle speed, the selected gear and whether CC or DSC is active. In particular, the maximum power is always constrained to the maximum engine power, i.e.,
where
is the efficiency of the gearbox and differential as function of the selected gear. The minimum power is constrained to:
This constraint means that braking with the electric motor and friction brakes is only allowed when the vehicle speed exceeds the desired downhill speed.
Solving (26) subject to (
27) and (
28a) is hard due to the nonlinear vehicle dynamics, the appearance of the derivative
and the constraints (28) and because the road slope is given as function of distance and not as function of time. Therefore, we propose to make a forward Euler approximation of (26) over the time horizon
at time instants
,
. This includes approximating:
We then find a solution for (26) subject to (
27) and (
28a) sequentially over the interval
and at each time instant
we switch, if necessary, between CC and DSC and select a different gear. The algorithm to predict the power request at the wheels is then given by:
| Algorithm 2: Prediction of the power request and engine speed. |
Initialize and measure , . For ,Obtain the road slope from ADASIS Calculate the engine speed with ( 26b) and, if necessary, shift gears according to ( 27) to obtain and If , set DSC active, otherwise set CC active if CC active: Calculate the power request with ( 26a) for the desired to obtain if DSC active: Calculate the power request with ( 26a) for the desired to obtain If , set , if , set and compute satisfying (26) Update vehicle speed: Update distance:
|
This algorithm predicts the power request and engine speed over the prediction horizon , which is used in (25) to obtain the average propulsion power and the average engine speed over the variable prediction time intervals for . This allows the optimal control problem (15) to be solved with the distributed model predictive control approach, as will be demonstrated in the next section.
5. Simulation Results
In this section, the results of the DEMPC approach to CVEM will be presented. We will focus on three aspects. The first aspect is the fuel saving potential of the distributed control approach, which is demonstrated by using the algorithm in a simple and predictable simulation environment. As prediction information is a key element in the proposed approach, the second step demonstrates the approach by using a high-fidelity vehicle model, where the power request and engine speed are predicted as in Algorithm 1. Finally, to demonstrate the real-time aspects of the algorithm, we will show the computational performance of the algorithm for a dSpace Autobox (dSPACE GmbH, Paderborn, Germany).
5.1. Fuel Saving Potential on a Low-Fidelity Vehicle Model
The energy management problem is solved in a receding horizon fashion as in
Section 3, where at each time instant
k the first input is implemented on the simplified power-based vehicle model introduced in
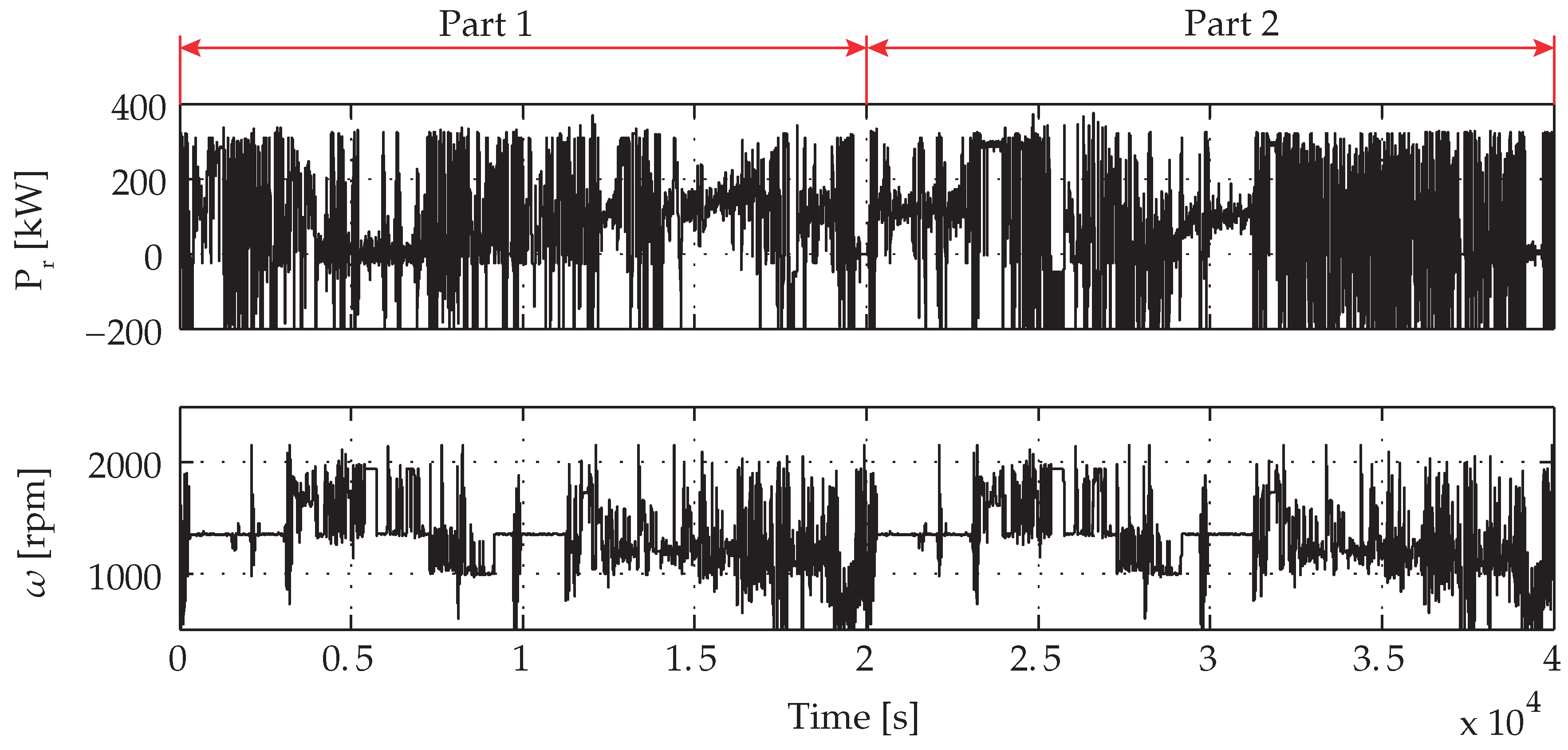
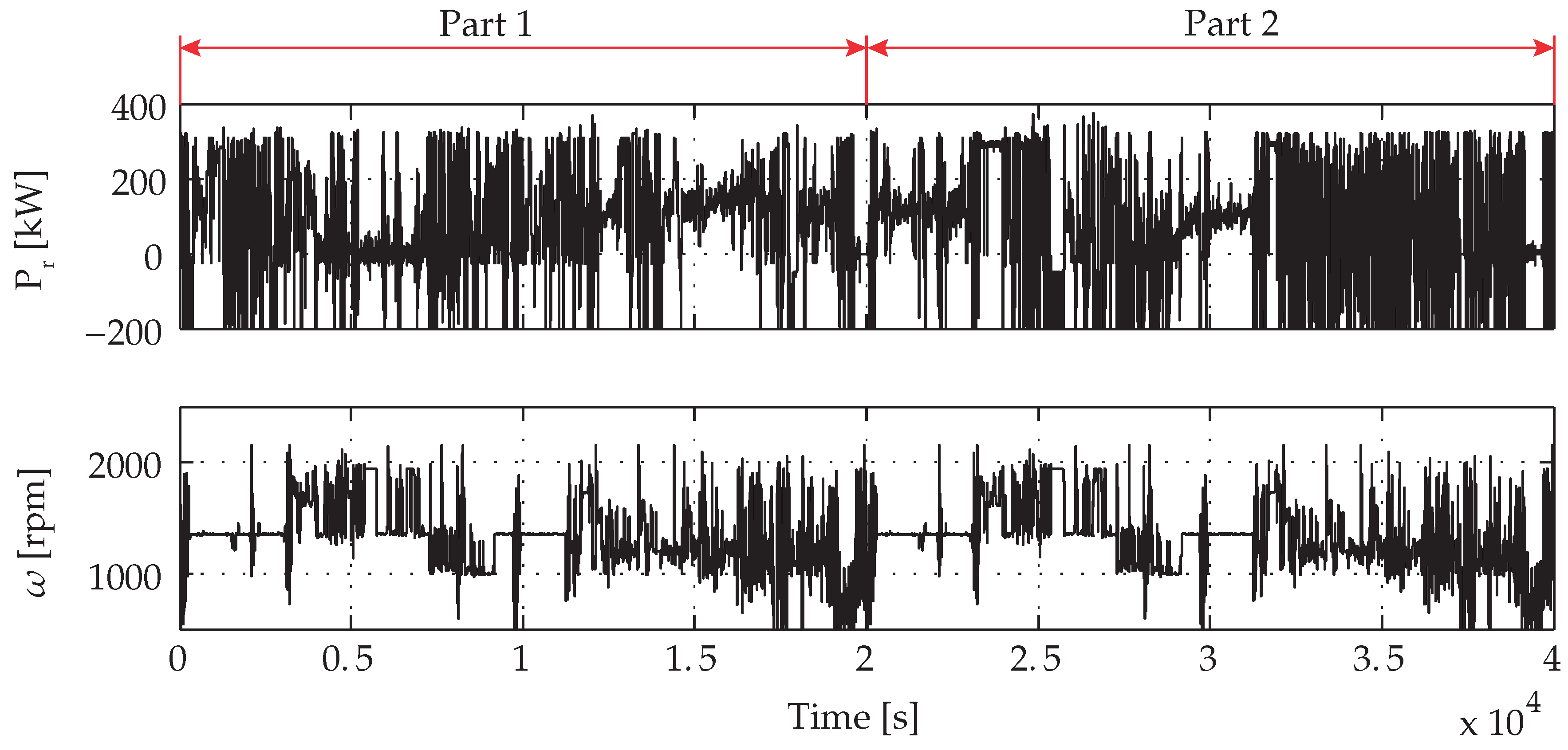
Section 2. The vehicle model runs at a frequency of 1 Hz where the exogenous disturbances, e.g., the drive cycle are piecewise constant at each time step. In particular, the drive cycle is obtained by simulating the high-fidelity vehicle model over two parts of a PAN European driving cycle to obtain the power required at the wheels, i.e.,
and the engine speed
which are shown in
Figure 4. The second part has more braking moments than the first part, which has an influence on the fuel reduction. Furthermore, the uncontrolled high-voltage auxiliaries are assumed to be absent so that
kW and the power required from uncontrolled low-voltage auxiliaries is assumed to be constant, i.e.,
kW.
We will first analyze the influence of the prediction horizon. Subsequently, we will give the results on the control of auxiliaries that can only be turned on or off and, finally, the influence of the number of iterations on the fuel reduction potential. The simulations done in this section will be benchmarked with the fuel consumption results of [
26] and will be performed under the same conditions. The state trajectories of the simulations presented below do not deviate noticeably from the state trajectories presented in [
26] and will therefore be omitted.
5.1.1. Influence of Prediction horizon
A key element in the proposed algorithm is the variable prediction time intervals that allow for a large control horizon with a few decision variables. Choosing the length of these variable prediction time intervals is not straightforward, but we will demonstrate that choices can be made based on practical limitations and intuition, while close to optimal performance can be achieved. To do so, we first consider the case of a hybrid electric truck without auxiliaries and predict the power at the wheels, i.e.,
for all
at time instant
k and the engine speed
for all
at time instant
k with (25), where
and
are given as in
Figure 4. We will consider three different cases with decreasing level of prediction information, i.e.,
Case 1: In this case, we do not take variable prediction time intervals, but take intervals of 1 s, i.e., . Because the simulation model has a sample time of 1 s, we have that the prediction is exact over the length of the interval . This also means that N is large to obtain a large control horizon. Real-time implementation is therefore not feasible and this case can only be solved for a hybrid truck without taking the auxiliaries into account in the energy management strategy.
Case 2: In this case, we do take variable sample intervals with and predict the propulsion power and engine speed with (25). We choose from a practical point of view as 80 s corresponds to about 2 km of prediction information at cruise control speed (84 km/h). This is the maximum distance over which prediction information is currently available with ADASIS in the prototype heavy-duty vehicle. To still allow for a larger control horizon, we can choose for which in this case the power at the wheels and the engine speed is calculated with (25) as well.
Case 3: This case is a small adaptation to Case 2. Namely, as prediction information is not available after 80 s (in practice), the propulsion power and the engine speed for , i.e., and , [-10]cannot be predicted and is therefore assumed to be fixed to a pre-specified value after 80 s.
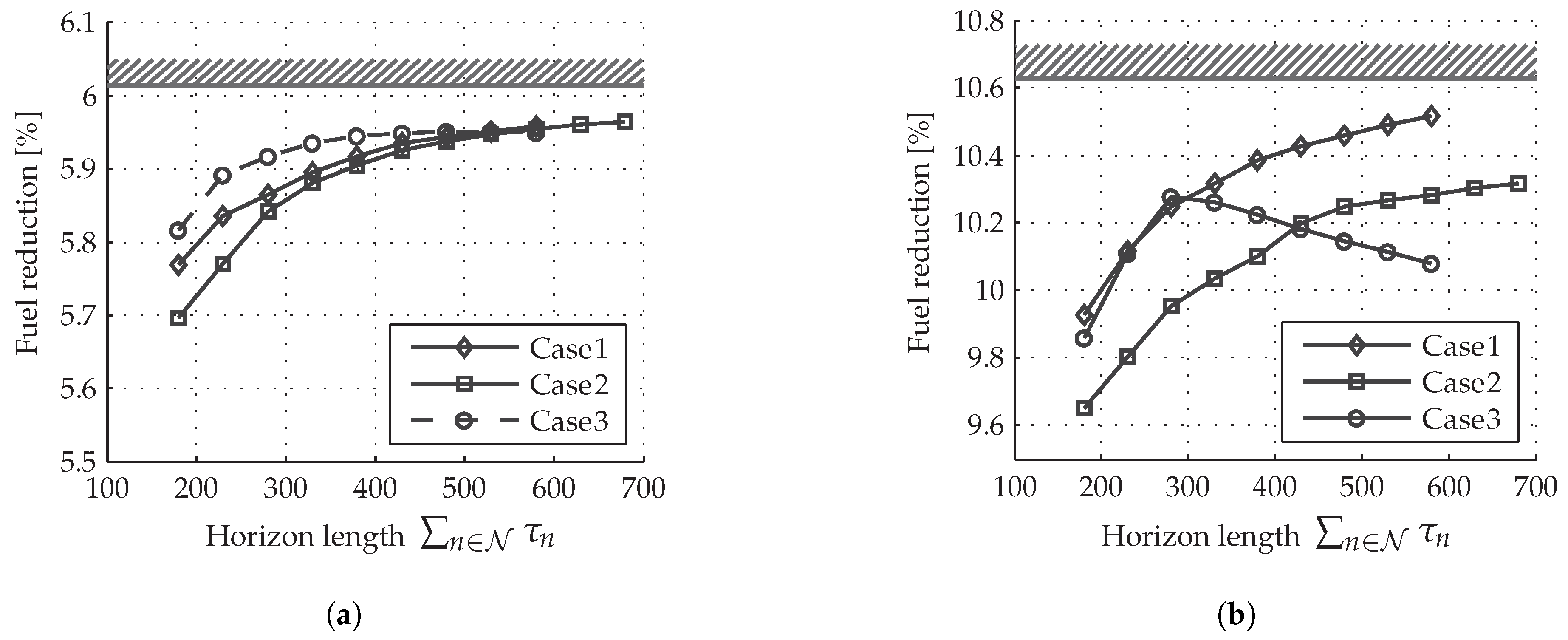
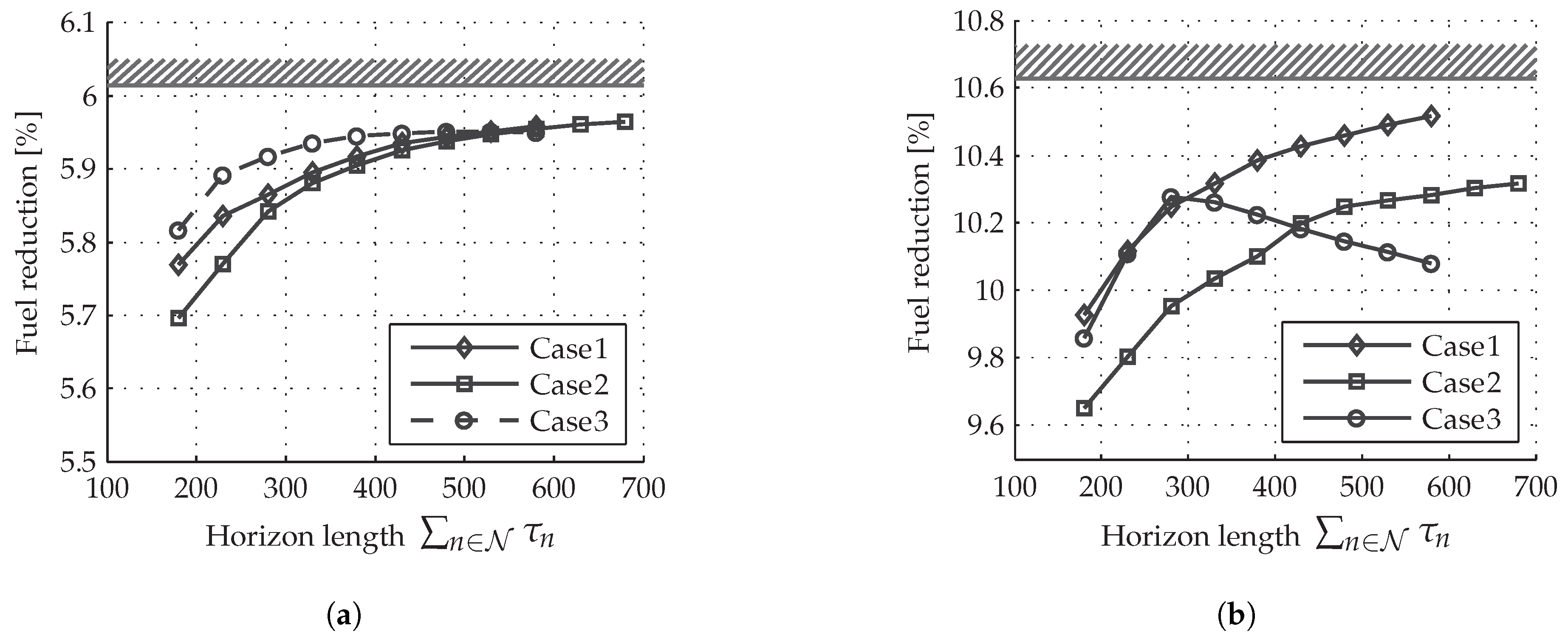
The choice for the sampling time intervals for Case 2 and Case 3 is based on three considerations, i.e., (i)
s, (ii) The first interval is 1 s as this decision is implemented, (iii) The intervals should increase in size as
, as nearby prediction information is likely to be more accurate. These considerations do not lead to too many significantly different choices for the sequence
,
and the results in
Figure 5 show that good performance can be achieved with the one proposed. In this figure, the fuel reduction is shown as function of the horizon length
for each of the three cases and for the two parts of the drive cycle. The horizon length for Case 1 is changed by changing
N while for Case 2 and Case 3, the horizon length is changed by changing
. Moreover, the global optimal solution is calculated with the approach presented in [
26] and shown as a constraint. Note that for Case 3, the power request after 80 s is fixed to a pre-specified value. Therefore, it is not useful to choose the horizon very long for Case 3 as this results in a lower fuel reduction.
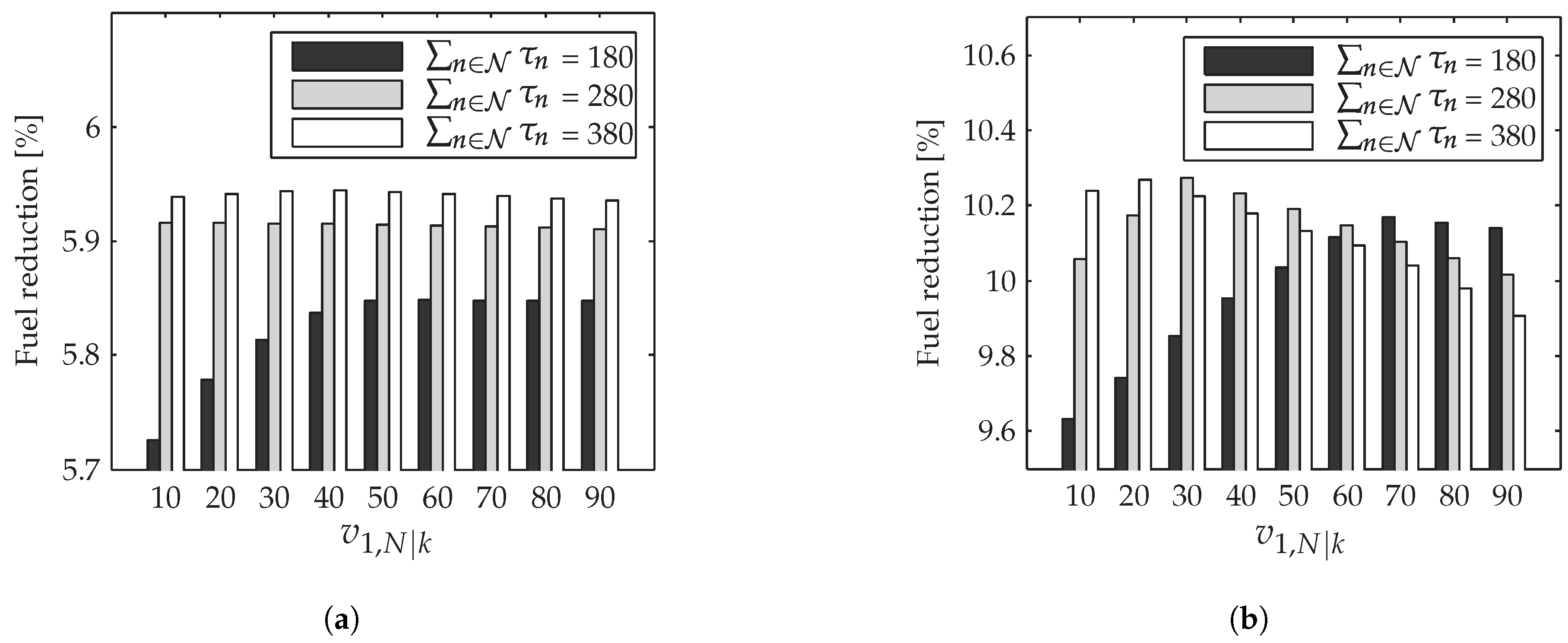
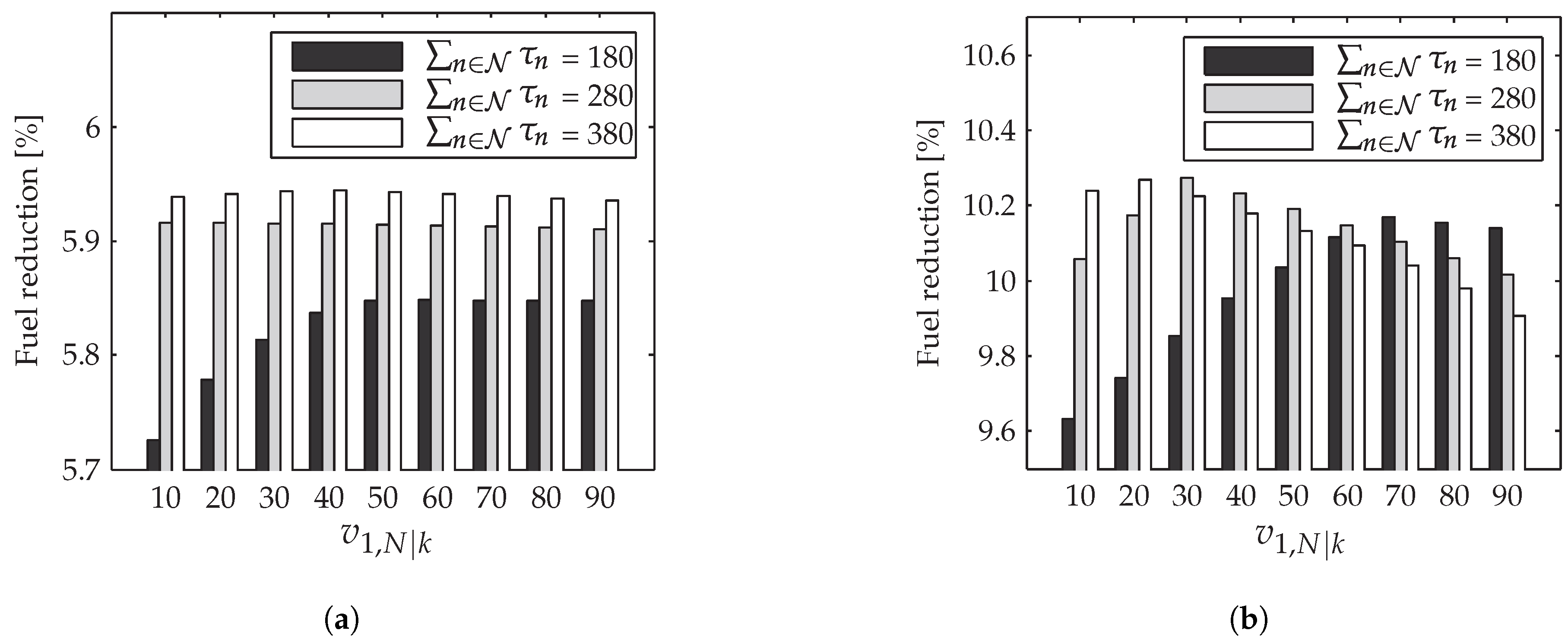
Figure 6 shows the simulation results for Case 3 for three different horizon lengths and where the power request after 80 s, i.e.,
, is varied from 10 kW to 90 kW and
rpm. The main conclusion drawn from these two figures is that Case 3, which is closest to practice, can achieve good fuel reduction performance and sensitivity to the length of the control horizon and the choice for
is not significant. For the remaining simulations, we choose
,
kW and
rpm.
These settings also fully define the smart control of the continuous controlled alternator. Smart control of the alternator (without a DCDC converter) leads to a fuel reduction of and fuel reduction for Part 1 and Part 2, respectively. By adding smart control of the DCDC converter, the fuel reduction is increased to and for Part 1 and Part 2, respectively. Smart control of the auxiliaries with on/off control will be discussed in the next section.
5.1.2. Auxiliaries with On/Off Control
Next, we consider the analysis of the on/off controlled auxiliaries. The simulation results are obtained by taking only the hybrid vehicle with one additional switching subsystem, e.g., the refrigerated semi-trailer. Note that this requires solving two QPs for every switched system at each time instant k. We have defined three different switching strategies, i.e.,
Strategy 1: For this strategy, the penalty parameter for switching is a constant value.
Strategy 2: Inspired by [
44], the penalty parameter for switching is defined by
where
is a target state and
is a positive weight. The target state is the lower energy bound if the subsystem is off and the target state is the upper energy bound if the subsystem is on.
Strategy 3: This strategy is a small adaptation of Strategy 2 and only used for the refrigerated semi-trailer and air supply system. Here, the desired final state in the energy storage device is adapted as a linear function of the average value of the dual variables, i.e., for some a and b and where the average value of the dual variables over the prediction horizon is given by . This can improve the performance of subsystems with a default switching time much larger than the prediction horizon, such as the refrigerated semi-trailer and air supply system.
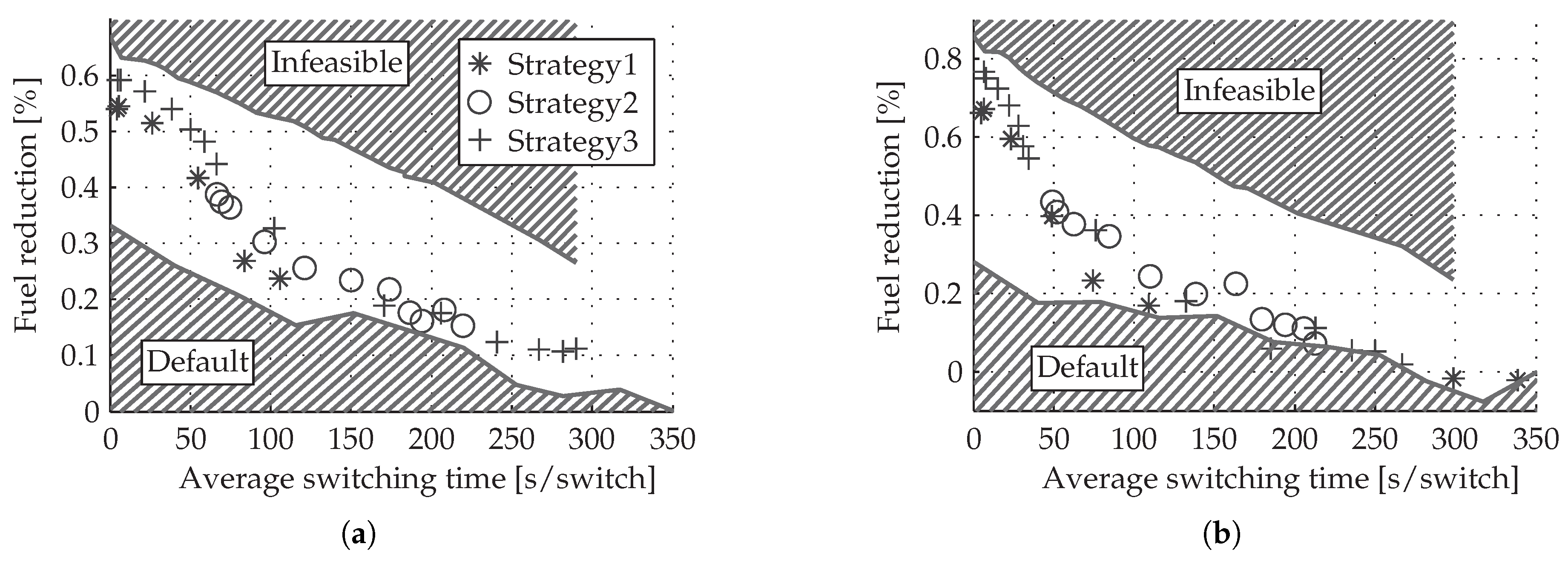
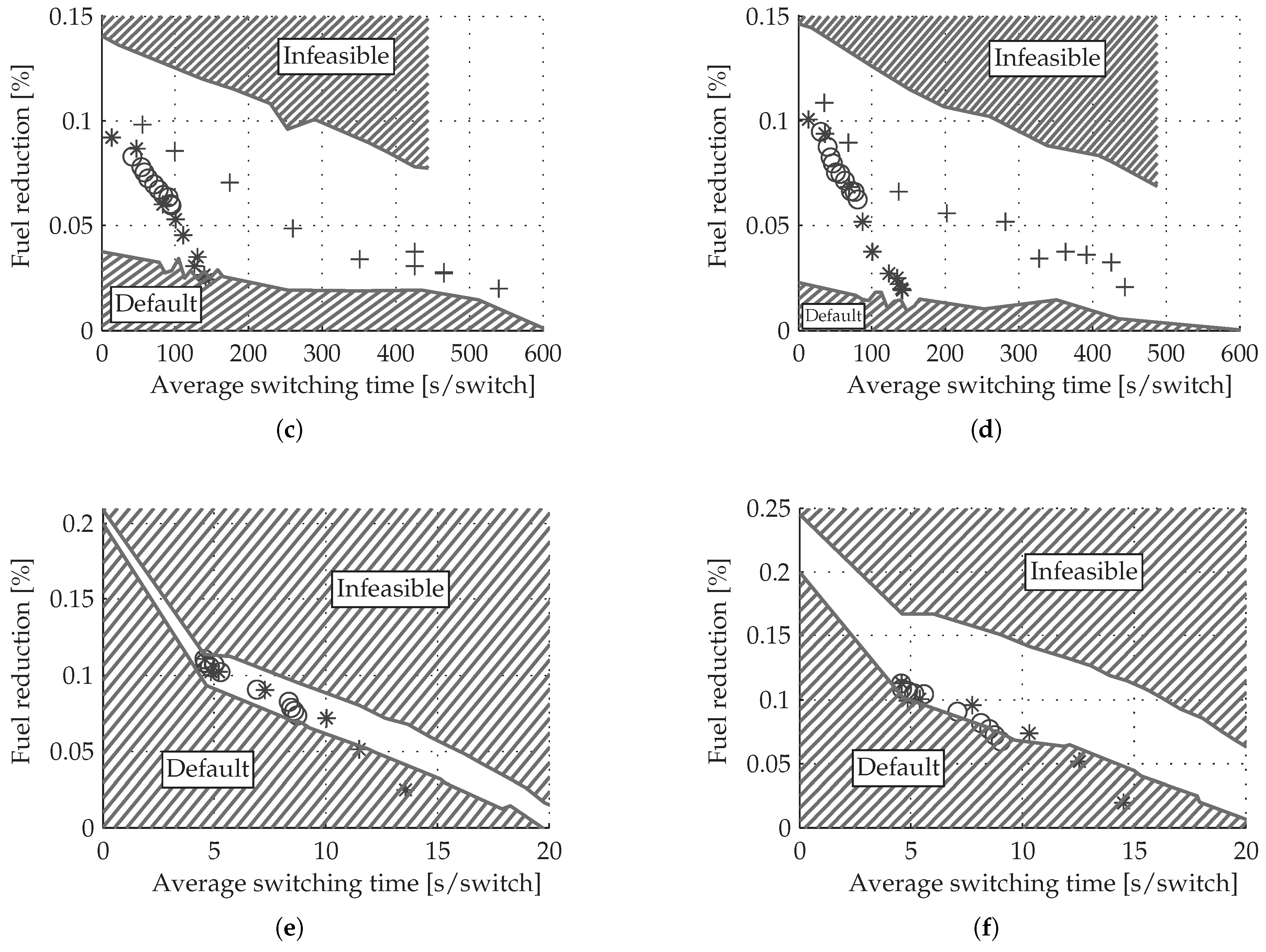
The fuel consumption with each of these strategies is compared to the fuel consumption with a default controller, which switches between a fixed upper and lower bound. For the refrigerated semi-trailer, the temperature cycles between 4.5 °C and 5.5 °C. For the air supply system, the air pressure cycles between 9.6 bar and 13.1 bar and for the climate control system, the wall temperature of the evaporator cycles between 9 °C and 13.5°C. The results for each of these strategies and each of the subsystems are shown in
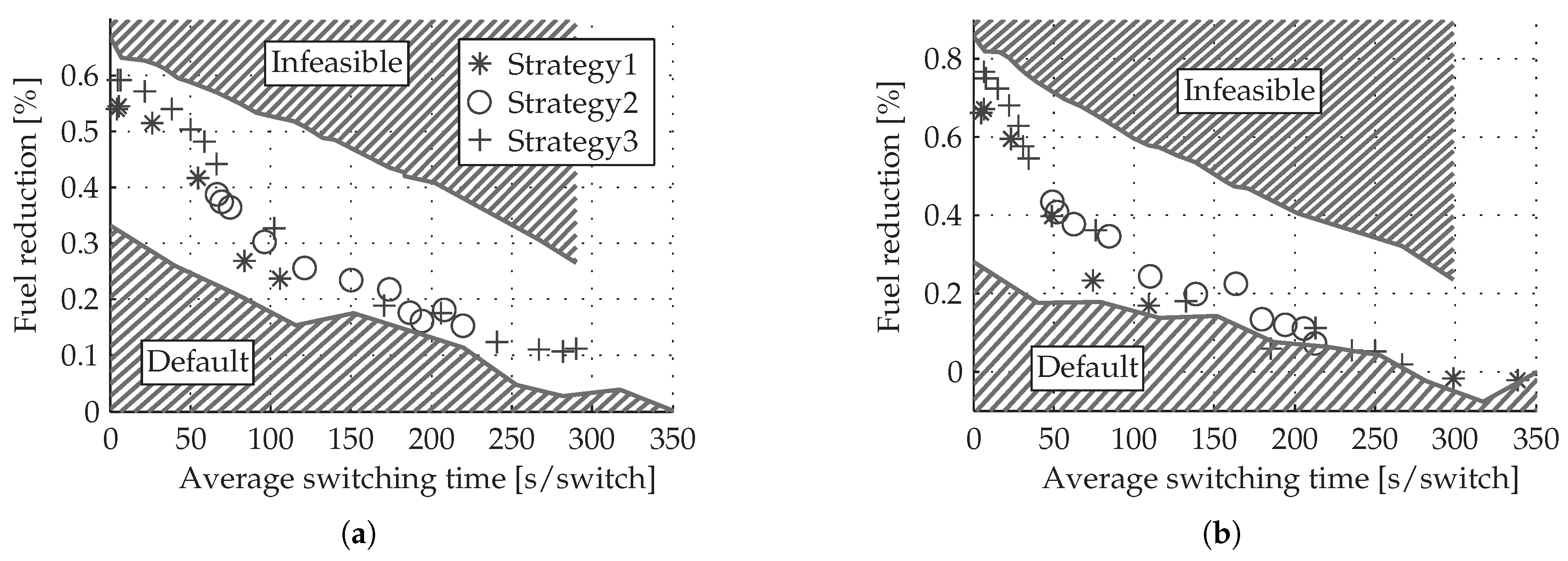
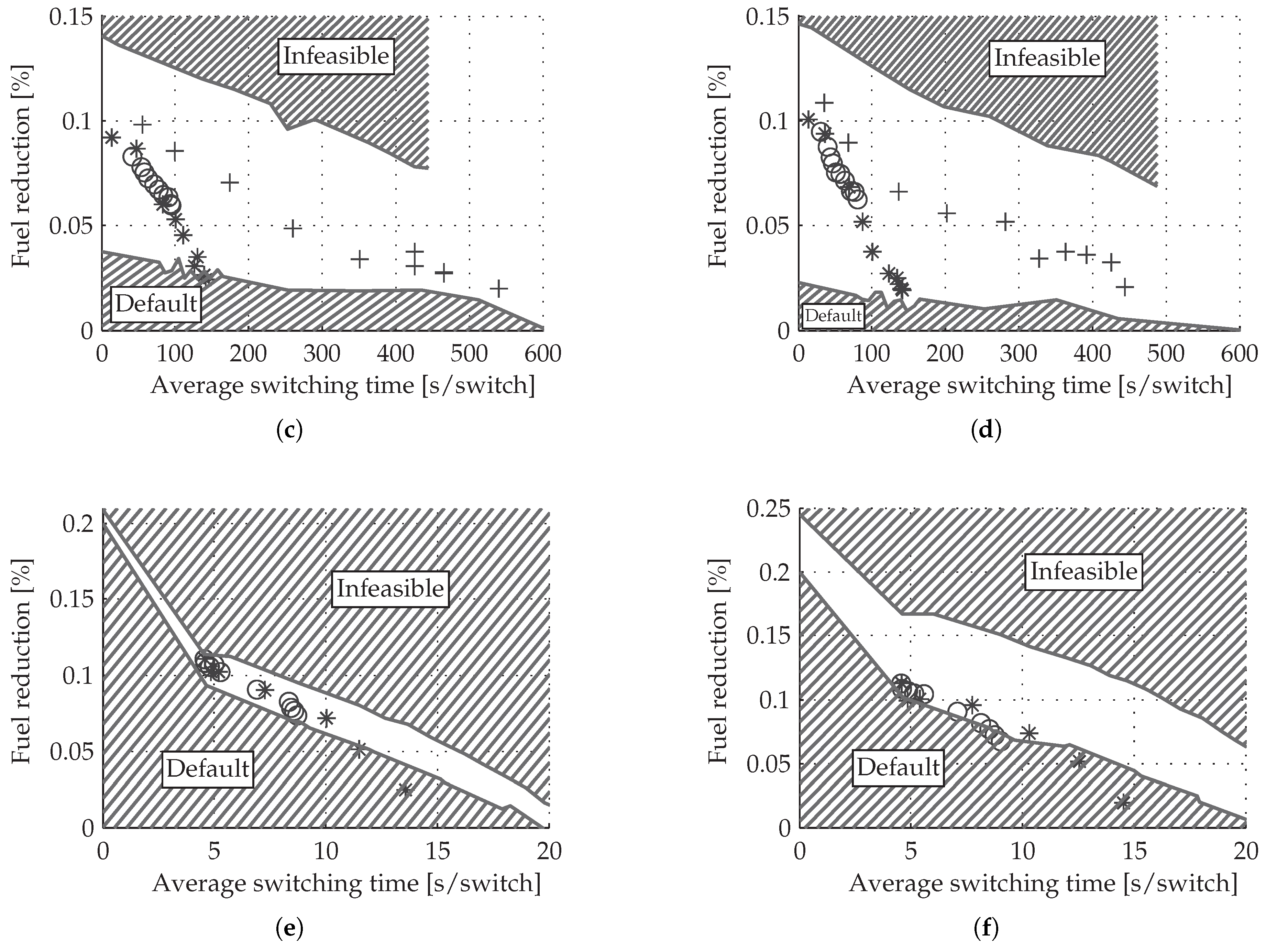
Figure 7 for Part 1 (a,c,e) and Part 2 (b,d,f) of the drive cycle. Different penalty parameter settings are used, which result in a different average switching time.
Figure 7 shows a feasible region for real-time control in between the two hatched regions, i.e., the infeasible region and the default controller region. The upper boundary of the feasible region is given by the optimal trade-off between the number of switches and the fuel reduction and obtained with dynamic programming [
45]. The default controller turns on the auxiliary when the lower energy limit is violated and turns the auxiliary off when the upper energy limit is violated. For these auxiliaries, it holds that the more energy is stored, the higher is the rate of energy dissipation to the environment. To show this, let us consider the example of a refrigerated semi-trailer, where a larger difference between the air temperature inside and the ambient temperature outside leads to a larger energy dissipation. By decreasing the upper energy limit, the number of switches with default control will increase, but also the energy dissipation reduces leading to a fuel reduction. This trade-off defines the lower boundary of the feasible region, which lowers the potential fuel reduction by smart on/off control for these auxiliaries. Still, a significant amount of fuel can be saved with the refrigerated semi-trailer, the air supply system and the climate control system, but the average switching time is also significantly lower.
For the refrigerated semi-trailer and the air supply system, it is very difficult to obtain a large average switching time as the switching time intervals easily exceed the maximum length of accurate prediction information. The climate control system is difficult to optimize as the fuel reduction for the default control strategy with a lower switching time is already quite high compared to the maximum obtainable fuel reduction.
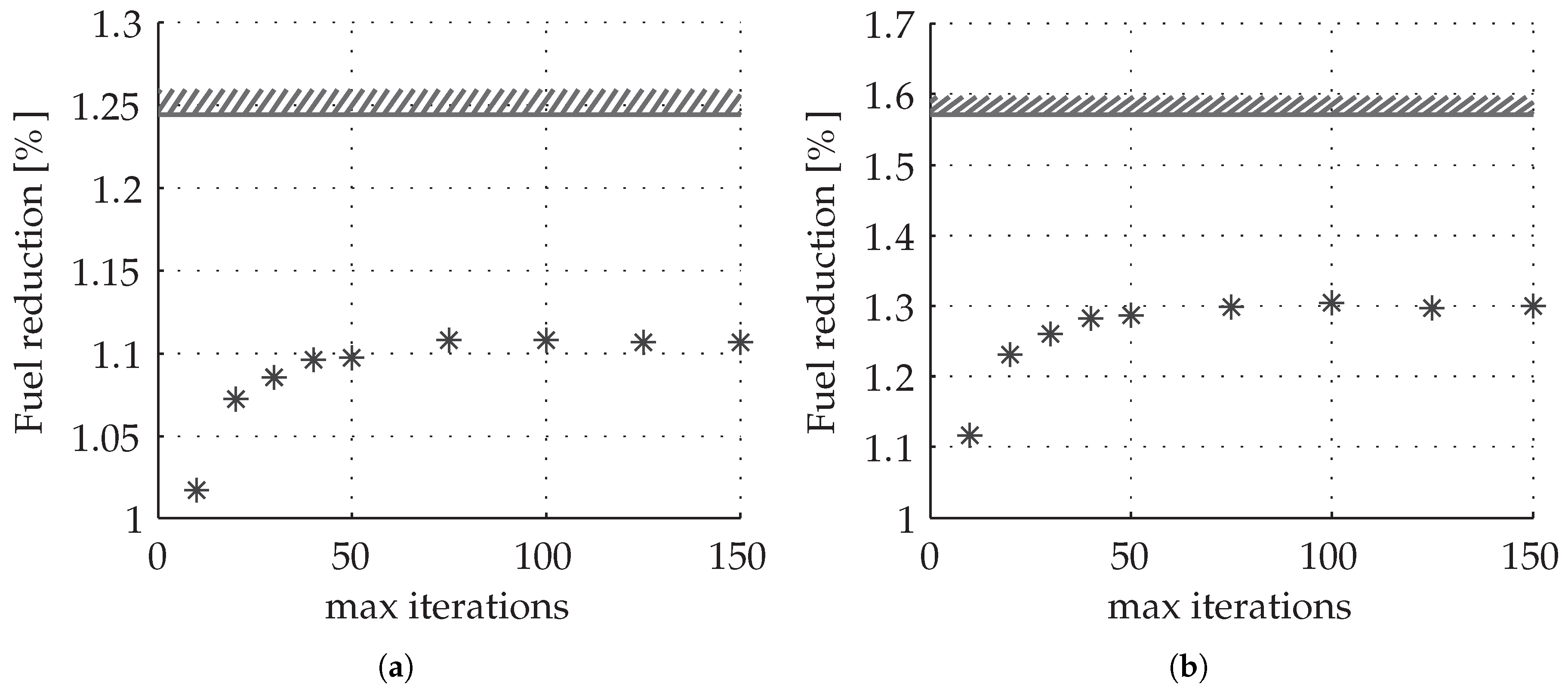
5.1.3. Number of Iterations
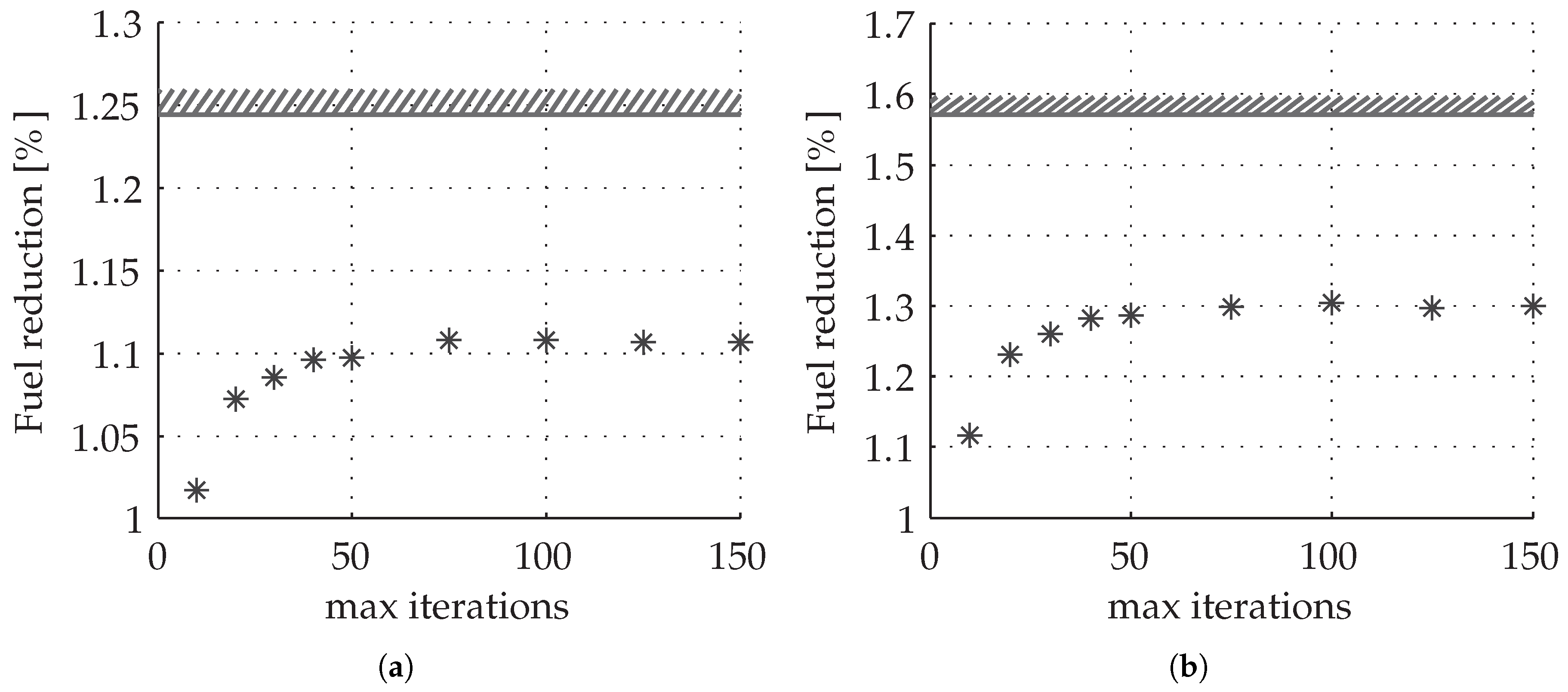
So far, the number of iterations in (19) for all the simulations do not have an upper bound. However, at each iteration, eight LCQPs need to be solved so that limiting the amount of iterations reduces the computation time and thereby improves the real-time properties. Therefore, smart control of the hybrid vehicle with all auxiliaries is simulated subject to a maximum on the number of iterations. The fuel reduction results by smart control of the auxiliaries are shown in
Figure 8 for Part 1 and Part 2 of the drive cycle. Only the fuel reduction of the smart auxiliaries are shown to demonstrate the potential of CVEM. The average switching time for the refrigerated semi-trailer is 35 and 22 s for Part 1 and Part 2, respectively, for the air supply system 52 and 31 s, for Part 1 and Part 2, respectively, and for the climate control system 7 s for both parts of the drive cycle. With a very low number of iterations, fuel reduction performance is indeed sacrificed, but the maximum fuel reduction performance is already achieved with an upper limit of 75 iterations, around 99% of the maximum fuel reduction is obtained with 50 iterations and around 97% of the maximum fuel reduction is obtained with only 25 iterations.
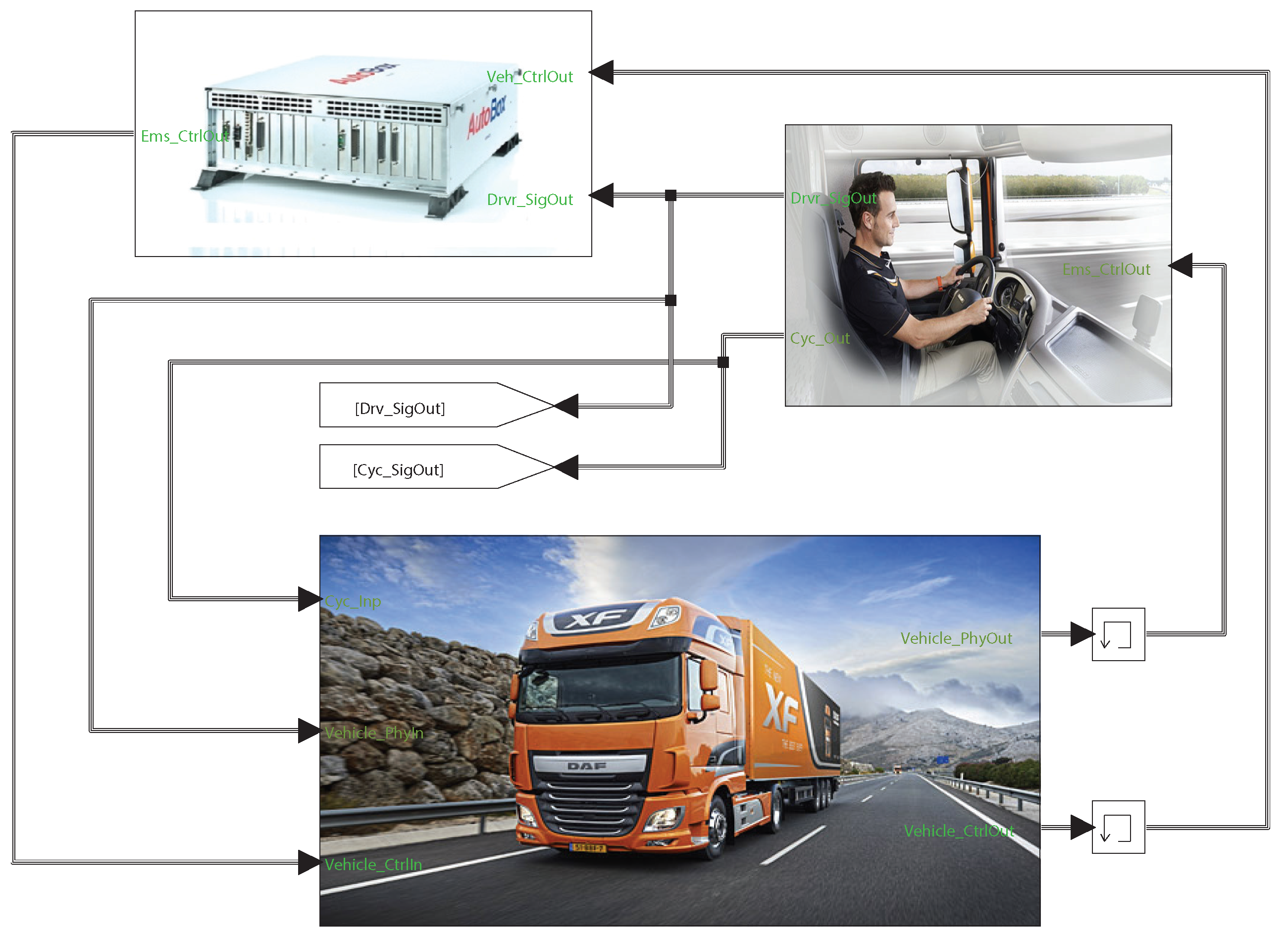
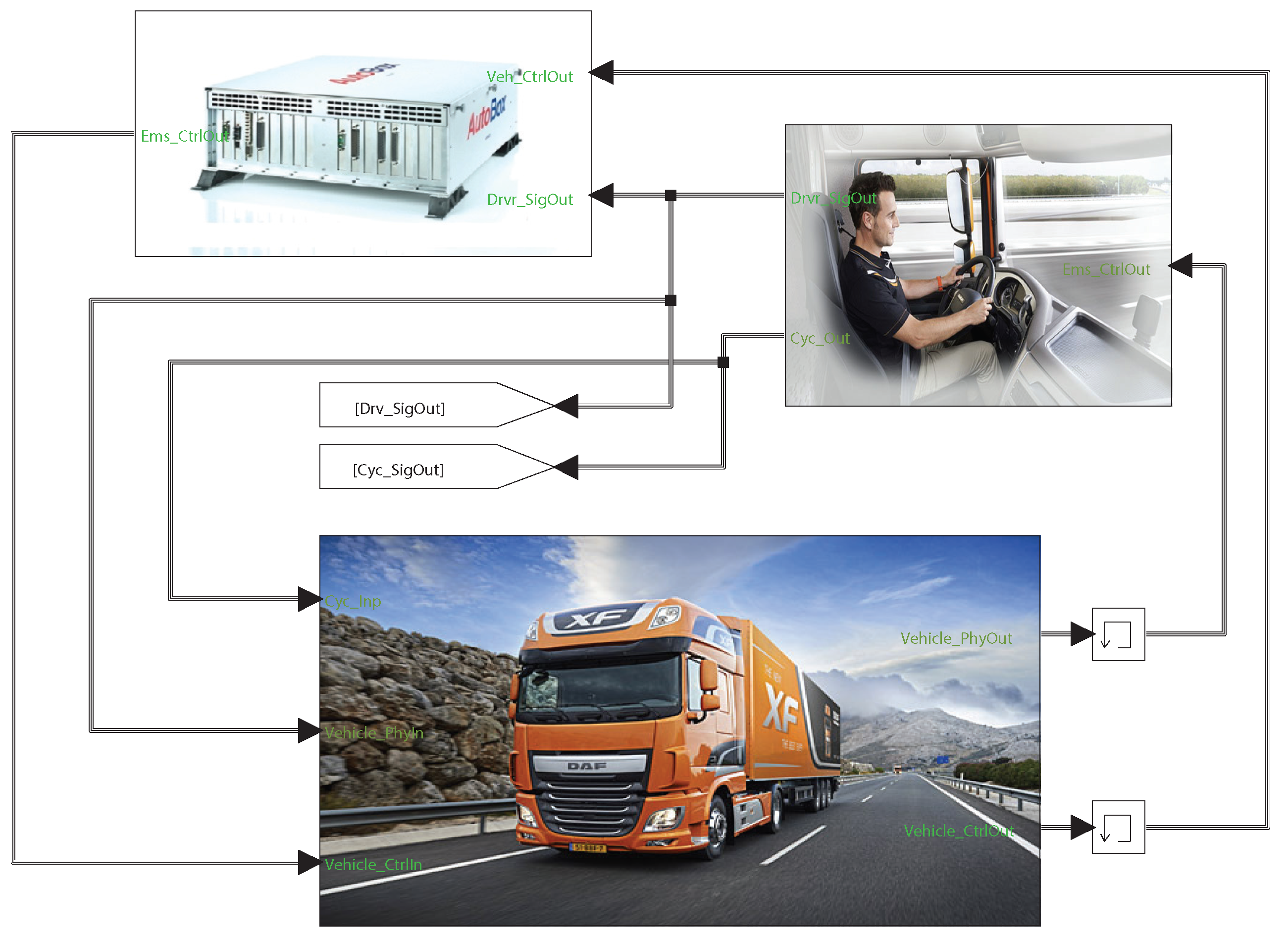
5.2. Validation on a High-Fidelity Vehicle Model with ADASIS Preview Information
A prototype vehicle has been built, which has a hybrid drive train with an internal combustion engine and an electric machine attached to a high-voltage battery system and all auxiliaries are electrified. At the moment of writing this paper, the prototype vehicle is not approved to be tested on the public road, but only on designated test tracks. This constrains the validation of the online solution strategy as prediction information is not available for driving on the test track. Namely, prediction information is essential to demonstrate the fuel reduction potential of the DEPMC strategy. Therefore, the DEMPC strategy is validated on a high-fidelity vehicle model (see
Figure 9) of the heavy-duty vehicle. The vehicle model is developed by the Institute für Kraftfahrzeugen Aachen (IKA, Aachen, Germany) [
46,
47]. It consists of a detailed vehicle model describing the longitudinal dynamics of the vehicle and the more-detailed (nonlinear) dynamics of all components in the vehicle.
The DEMPC strategy provides a setpoint to all subsystems in the vehicle, including the electric machine and internal combustion engine. However, control of the electric motor and internal combustion engine is difficult as safety is critical for a vehicle that weighs up to kg. Control of the hybrid system with DEMPC is therefore not feasible in the prototype vehicle. Therefore, it is decided to validate the strategy without control of the hybrid power split in the high-fidelity vehicle model as well. Still, the power required at the wheels can become negative, meaning that braking energy will be regenerated by the hybrid power split and stored in the high-voltage battery. This power can be used by the other subsystems, i.e., the refrigerated semi-trailer, the air supply system, the climate control system, the DCDC converter and the alternator, which receive setpoints from the DEMPC strategy. This still allows validation of the fuel reduction potential for most of the subsystems in the heavy-duty vehicle. The hybrid system is still an essential part of the DEMPC strategy, as the auxiliaries need the decisions from the hybrid system to optimize their own decisions. By doing so, the algorithm predicts the behavior of the hybrid system by assuming that the hybrid system will make the optimal decisions along the objective function in the optimal control problem.
5.2.1. Prediction of the Power Request and Engine Speed
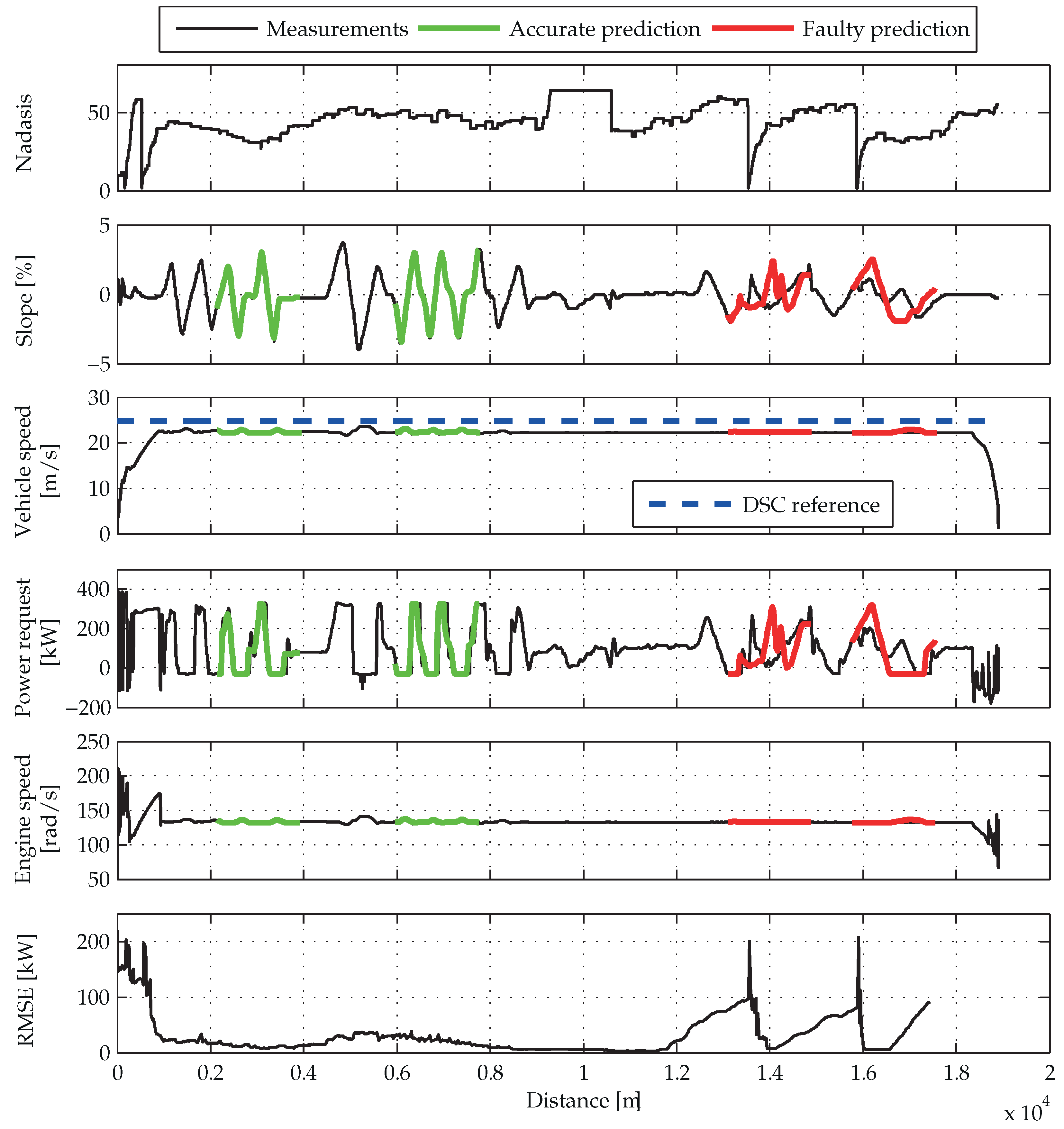
In the prototype vehicle, the road slope is predicted by the ADASIS protocol, which gives the road slope as function of the relative distance from the current position of the vehicle. ADASIS measurements are gathered for a highway cycle of 19 km driven in the region of Eindhoven (Netherlands). ADASIS provides the road slope at non-uniform distances from the current position. Moreover, the future road slopes are not instantly available but come available as a receding horizon based on the most probable path predicted by ADASIS.
The amount of predicted road slopes, indicated with
therefore changes all the time as shown in
Figure 10. The upper plot in this figure shows the number of predictions as function of the distance driven by the vehicle in the high-fidelity simulation environment. It can be seen in this figure that the power request is predicted in a consistent way, e.g., when the road slope becomes negative, the vehicle speed increases and the power request becomes negative. Occasionally, the number of predictions goes to zero, which happens when the vehicle takes an unexpected exit, i.e., the vehicle deviates from the most probable path predicted by ADASIS. After the exit, the ADASIS protocol notices that a different path is taken and all erroneous predictions are discarded. This happens three times on the drive cycle under consideration. The measured road slope and four examples of a road slope prediction by ADASIS are shown in the second plot. For the green labeled examples, plenty of predictions are available and no unpredicted exit is taken, which lead to very accurate prediction of the road slope. For the red labeled examples however, unpredicted exits are taken in the future, which result in a faulty prediction of the road slope. As a consequence, the velocity, the power request and the engine speed predicted with Algorithm 2, is quite accurate for the green labeled examples but faulty for the red labeled examples. This is also shown by the plot with the average root mean square error (RMSE) of the difference between the predicted power request and the measured power request over the entire prediction horizon. This plot clearly shows that if the vehicle follows the most probable path, an accurate prediction of the future power request can be made with Algorithm 2 in combination with the ADASIS protocol. As heavy-duty vehicles often tend to drive the same route, the protocol can and will be improved in coming years by taking this information into account for predicting the most probable path.
The drive cycle for which ADASIS information is available is very short and the area around Eindhoven is very flat so that differences in road slope are mainly caused by driving up and down flyovers. The differences in road slope are not even significant to reach the downhill speed control (DSC) reference speed after which the vehicle starts to actively recover brake energy with the hybrid system. This cycle will therefore not show the true potential of the DEMPC approach to CVEM. Instead the fuel reduction is analyzed with the high-fidelity vehicle model by driving the same drive cycle as used for the low-fidelity vehicle model. We will assume that the vehicle always follows the most probable path, i.e, the road slope prediction is exact. This leads to an average RMSE of 29 kW for the power prediction, which is similar to the RMSE made with the ADASIS protocol and Algorithm 2.
5.2.2. Fuel Reduction Results
The fuel reduction results with DEMPC approach are given in
Table 1. To analyze the fuel reduction contribution of each of the subsystems, the results of various simulations are shown for which only one subsystem is being controlled with the DEMPC approach. The fuel reductions are given for Part 1, i.e., for
and for Part 2, i.e., for
. These are the same parts used to evaluate the control strategy on the low-fidelity vehicle model. For a complete analysis, the difference in stored energy inside the energy storage systems at the start and end of the cycle must be taken into account. However, as each of these drive cycles is very long, the effect on the overall fuel consumption is small and neglected in this table.
The fuel reduction is strongly related to the average switching time for the refrigerated semi-trailer, the air supply system and the climate control system. Compared with the default control strategy, the average switching time is decreased with a factor 8.5, 82 and 1.5 for the refrigerated semi-trailer, the air supply system and the climate control system, respectively.
For these average switching times the fuel reduction obtained with CVEM in the high-fidelity vehicle model is around half the fuel reduction obtained with the low-fidelity vehicle model. The amount of regenerative energy harvested on the low-fidelity vehicle model is, for all subsystems, larger than for the high-fidelity vehicle model, which can explain some of the differences in the fuel reduction. In particular, the energy harvested by the electric machine in the high-fidelity vehicle model is 25.8% lower than in the low-fidelity vehicle model due to, e.g., power restrictions caused by the time needed for gear shifting in the high-fidelity vehicle model. This has a significant impact on the fuel reduction potential of CVEM. Furthermore, comparing percentages is difficult as the fuel consumption for the default control strategy is 10.7% higher in the high-fidelity vehicle model than in the low fidelity vehicle model.
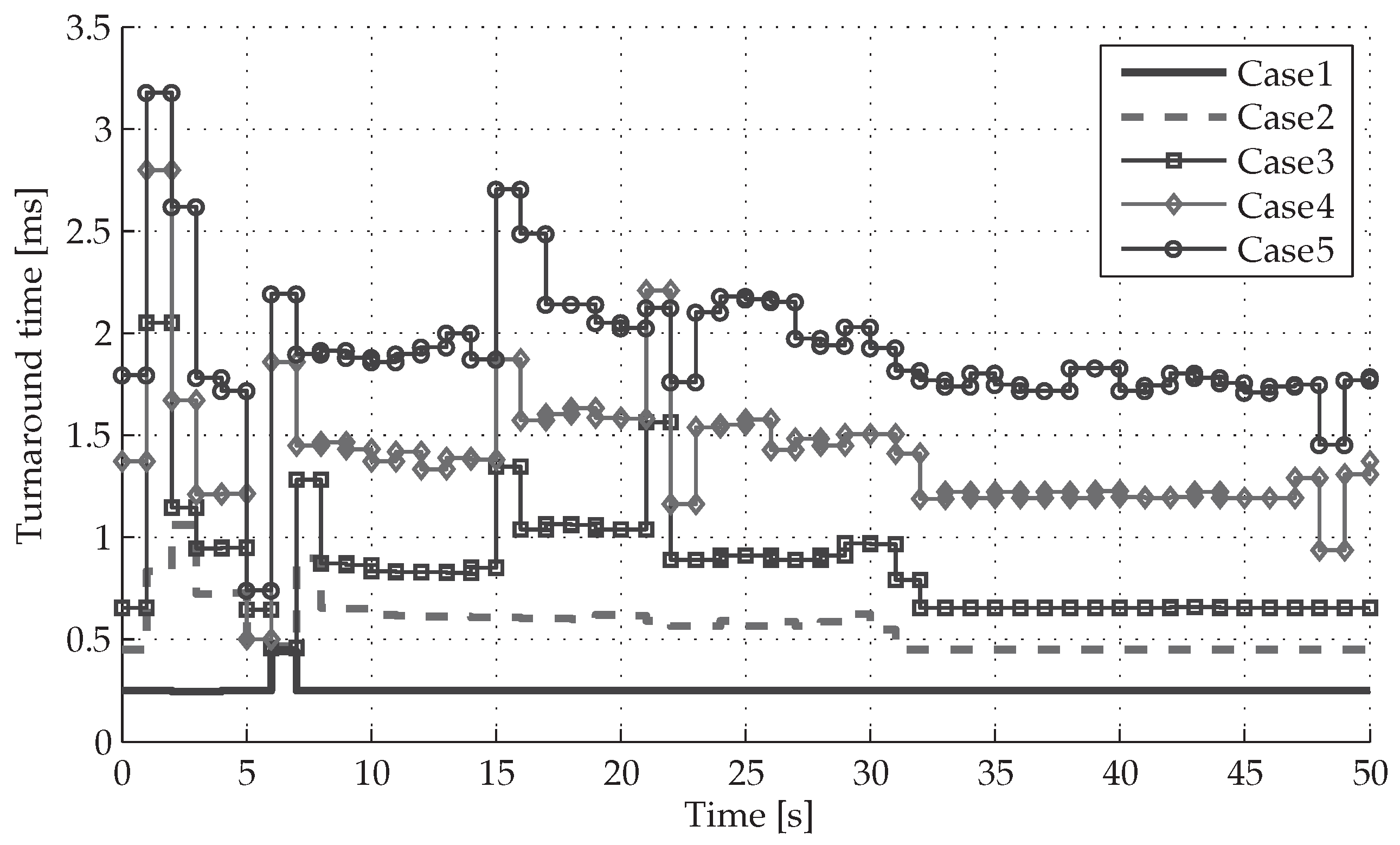
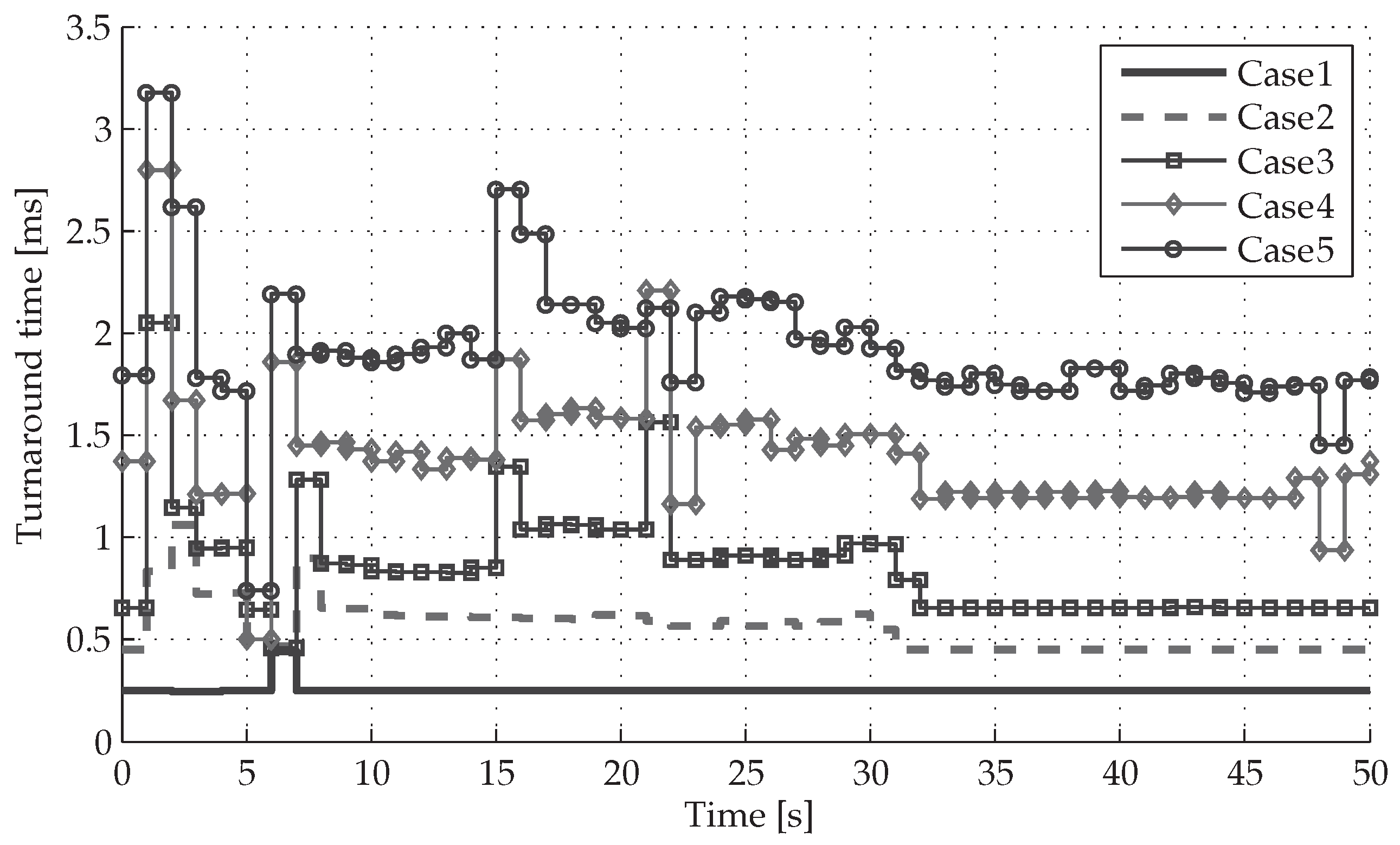
5.3. Implementation on the dSpace Autobox
As a final step to prove feasibility of the DEMPC approach to CVEM, the algorithm is implemented on a dSpace Autobox. The prototype vehicle is equipped with a dSpace Autobox with a DS1005 PPC Board (dSPACE GmbH, Paderborn, Germany) that features a PowerPC 750GX processor (dSPACE GmbH, Paderborn, Germany) running at 1 GHz. To test the real-time aspects of the control algorithm proposed in this paper, the algorithm is implemented onto the DS1005. The algorithm is running in open loop, i.e., the inputs for the control algorithm, e.g., the vehicle velocity, distance are not following from the vehicle model, which is too large to run in real-time, but follow from lookup tables. Similarly, the setpoints generated by the control algorithm are not implemented on the vehicle model but are discarded. Still, the ADASIS information is processed in real-time as function of the distance driven by the heavy-duty vehicle. This approach allows us to isolate the computational performance of the previewer and the control algorithm only.
Five cases are given in
Table 2 to analyze the scalability properties. The algorithm is running at 50 Hz and at each sampling period, one iteration of the dual decomposition algorithm is executed, i.e., the number of QPs as given in
Table 2 are solved and the dual variables are updated once. This allows for 50 iterations as the setpoints for the subsystems are updated with a frequency of 1 Hz. The turnaround times of the algorithm are given in
Figure 11 for each of the cases over the first 50 s of the drive cycle given in
Figure 10. It is shown that by smart control of all subsystem (Case 5), the worst case execution time still only occupies 16% (
) of the sampling period. The remaining time can be used for other tasks or the update frequency of the setpoints can be lowered.
6. Conclusions
This paper proposes an online solution strategy for complete vehicle energy management. The approach is based on applying a dual decomposition to the receding horizon optimal control problem, so that the problem related to each subsystem can be solved separately. Each problem related to each subsystem is a linearly-constrained quadratic program that can be solved efficiently with embedded quadratic programming solvers. Variable prediction time intervals are used to obtain a long control horizon with a limited number of decision variables. As a result, the final state constraint can be used as a constraint, instead of a soft constraint. Furthermore, a novel on/off control concept for control of the refrigerated semi-trailer, the air supply system and the climate control system is introduced. The concept requires solving the linearly-constrained quadratic program twice, one with the first decision being on and one with the first decision being off. The solution with the lowest cost is taken as the optimal solution.
The proposed strategy requires limited tuning. Namely, the only parameters for the solution strategy proposed in this paper are the variable prediction time intervals and the penalty parameters for switching. The variable sample times can be chosen intuitively, and simulation results on a low-fidelity vehicle model show that close to optimal fuel reduction performance can be achieved without carefully tuning these sample times. The fuel reduction of the on/off controlled subsystems strongly depends on the number of switches allowed. The fuel reduction for the on/off controlled subsystems can be close to optimal, but the number of switches needs to increase significantly. Still, by allowing up to 15-times more switches, a fuel reduction of up to 1.3% can be achieved for the low-fidelity vehicle model with exact future knowledge of the disturbances.
The DEMPC approach has also been validated on a high-fidelity vehicle model, for which the propulsion power and the engine speed have been predicted by assuming that the vehicle follows a reference speed set by the cruise control or the downhill speed control, which is valid for highway driving. This allowed the vehicle speed to be predicted over a trajectory with a road slope predicted by an e-horizon sensor, e.g., ADASIS, leading to a prediction of the propulsion power and engine speed. The prediction algorithm has been validated with measured ADASIS information on a public road around Eindhoven, which demonstrated that accurate prediction of the propulsion power and engine speed is feasible if the vehicle follows the most probable path. A fuel reduction of up to 0.63% can be achieved for the high-fidelity vehicle model. This is indeed lower than estimated with the low-fidelity vehicle model, which can partly be related to the 25% less braking energy that is recovered in the high-fidelity vehicle model. Moreover, the absolute fuel consumption of the default control strategy is 10% higher. Therefore, future research should focus on methods for generating low-fidelity subsystem models from high-fidelity subsystem models, as well as allowing the DEMPC to control the hybrid power split, which is currently not possible in the high-fidelity model.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}