1. Introduction
Strong wind and storms threaten the stable operation of power systems by damaging power grid equipment, especially transmission lines [
1]. On 29 August 2015, a fierce windstorm swept through southern British Columbia, knocking down tens of power lines and leaving about 500,000 BC Hydro customers without power supply overnight [
2]. On 28 February 2010, with the influence of strong wind, tens of transmission lines were tripped due to line galloping in Shandong Province, leading to network splitting of the regional power grid from the north China power grid [
3]. Therefore, strong wind can not only bring mechanical damage to the power grid, it can also trigger line galloping of transmission lines [
4]. In recent years, the increasing penetration rate of renewable energy resources, especially wind power, into the power grid also requires paying more attention to the defense of strong wind disasters [
5].
American researchers first reported the line galloping events in the 1930s [
6], which have since been studied by many researchers around the world. The Den Hartog and O. Nigol mechanism of line galloping is presented in [
7,
8]. In [
9] Hu revealed the characteristics of line galloping based on a statistical approach. The mathematical model of line galloping of overhead high voltage transmission lines is constructed by Borna in [
10], and a three-degree-of-freedom model is developed to describe and predict different galloping behaviors of a single iced electrical transmission line by Yu in [
11]. Diana present a numerical approach to reproduce lines oscillation and compare with experimental data in [
12].
Actually, despite the serious harm of line galloping on power systems, the research on line galloping and power systems have always been separated from each other. On one hand, previous works usually ignore wind effects on power system operations when studying the dynamic process of wind affecting a power grid, and only the statistical data of line tripping results can be obtained [
13]. On the other hand, power system numerical simulation has been developing rapidly over the past few decades [
14], from simulating the physical dynamics of power grids to integrating economical (market) events [
15,
16]. It is hard to uncover the affecting mechanism between line galloping and power systems in the respective research, although it does offer valuable guidance regarding the defensive measures against extreme weather events. In [
17] Chen and Zhang construct a numerical simulation platform combining power system and ice accretion dynamic processes, which provides guide methods for future research on line galloping.
Compared with traditional power system simulation techniques [
18], great challenges exist in the hybrid simulation of both line galloping and power system dynamic processes. Firstly, the mechanism of line galloping affecting power systems needs to be described with an appropriate model. Secondly, the slow and fast dynamics need to be combined into one simulation framework. Finally, the efficiency of the simulation platform ought to be ensured, as well as the expanding complexity of the traditional simulation platform.
To reveal the effects of line galloping on a power system dynamic process, a simulation framework considering the effects of line galloping is constructed in this paper. Through reasonable modeling, the relationship between line galloping amplitude and the probability of line faults is constructed, in which probabilistic sampling is deployed to reflect the randomness characteristics of line galloping. Considering the differences in time scales, hybrid simulation is carried out by a combination and transfer of a line galloping process, power flow calculation process, and power system transient stability simulation process. The simulation package of line galloping is developed based on Power System Simulator/Engineering (PSS/E), which has greatly extended current concepts and functions of power system numerical simulation.
The rest of this paper is organized as follows: line galloping modeling and effects on power systems are analyzed in
Section 2.
Section 3 presents the framework of simulating power system faults caused by line galloping. The key issues and implementations of the above framework are discussed in
Section 4. In
Section 5, the proposed approach is verified by case studies.
2. Line Galloping Modeling and Effects on Power Systems
2.1. Modeling of Line Galloping
Line galloping is a low frequency (0.1–3 Hz) and large amplitude (0.1–1 time the sag of span) vibration of overhead power transmission lines [
19]. Many research studies have been conducted in the trajectory simulation of line galloping. Den Hartog put forward the theory of vertical line galloping [
4]. Nigol presented the mechanism of torsional affect to describe line galloping [
7,
8]. The other galloping theories are all based on these two. One of the most common models of line galloping is the single-degree-of-freedom model, which is described with equivalent clustered (or equivalent moment of inertia) and stiffness. Based on the D’Alembert principle [
20], line galloping can be expressed as shown in Equation (1):
where:
| z | amplitude of line galloping (m); |
| structural damping rate; |
| natural frequency of structure vibration; |
| u | wind speed (m/s); |
| density of air (kg/m3); |
| D | diameter of transmission line (m); |
| m | weight of unit length transmission lines and ice (kg/m); |
| attack angle; |
| , | lift and resistance coefficient, respectively. |
Through fitting and derivation, the amplitude of line galloping can be expressed as Equation (2):
where:
| a, b | constant coefficients; |
| m | equivalent weight (kg); |
| k | equivalent stiffness (N/m); |
| L | length of transmission lines (m); |
| m1 | weight of unit length transmission lines (kg/m); |
| m2 | weight of ice of unit length transmission lines (kg/m); |
| r | radius of transmission line (m); |
| thickness of ice (m); |
| density of ice (kg/m3); |
| A1 | cross section of lines; |
| F | maximum stress * 20% (N). |
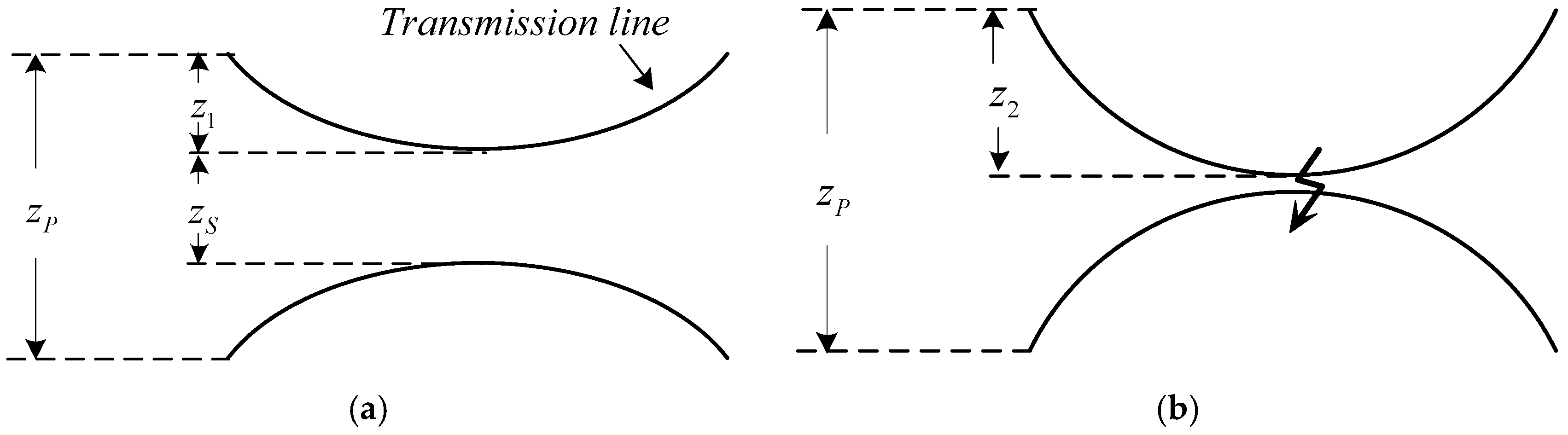
When transmission lines gallop with wind, the radius of trajectory is assumed as the maximum value, which is the amplitude of the model as expressed in Equation (2). Line galloping is mainly affected by three factors. Firstly, when asymmetric ice accumulates on transmission lines in weather conditions such as icing rain or snow, the shape of ice and the direction between ice and wind will affect the occurrence probability of line galloping. Secondly, the angle differences between wind direction and transmission lines will also affect line galloping. Actually, the wind vertical to the direction of the transmission lines plays a key role. Thirdly, line galloping is also affected by the structure and parameters of transmission lines, such as the type of transmission lines, line tension, pitch, arc hammer, etc.
2.2. The Mechanism of Line Galloping Affecting Power Systems Operation
Equation (1) can be simplified as Equation (6), which describes the dynamic process of line galloping:
where
z is the amplitude of line galloping; and
α1,
α2 and
α3 are the coefficients that are determined by meteorological data, the parameters of transmission lines, and others.
A dynamic power system can be expressed as algebraic equations and differential Equation (7).
where:
| x | vector of state variables of the power system (rotor angle, speed and internal transient voltage, etc.); |
| y | vector of algebraic variables of the power system (transmission line impedance, bus voltage, etc.); |
| Fe | vector of differential equations that describe the electromechanical transient processes; |
| Ge | vector of algebraic equations that expresses the constraints of power flow. |
The probability of line faults is related with the amplitude of line galloping, as expressed in Equation (8).
where
η is the probability of line faults,
F is the relationship expression of line galloping amplitude and line faults.
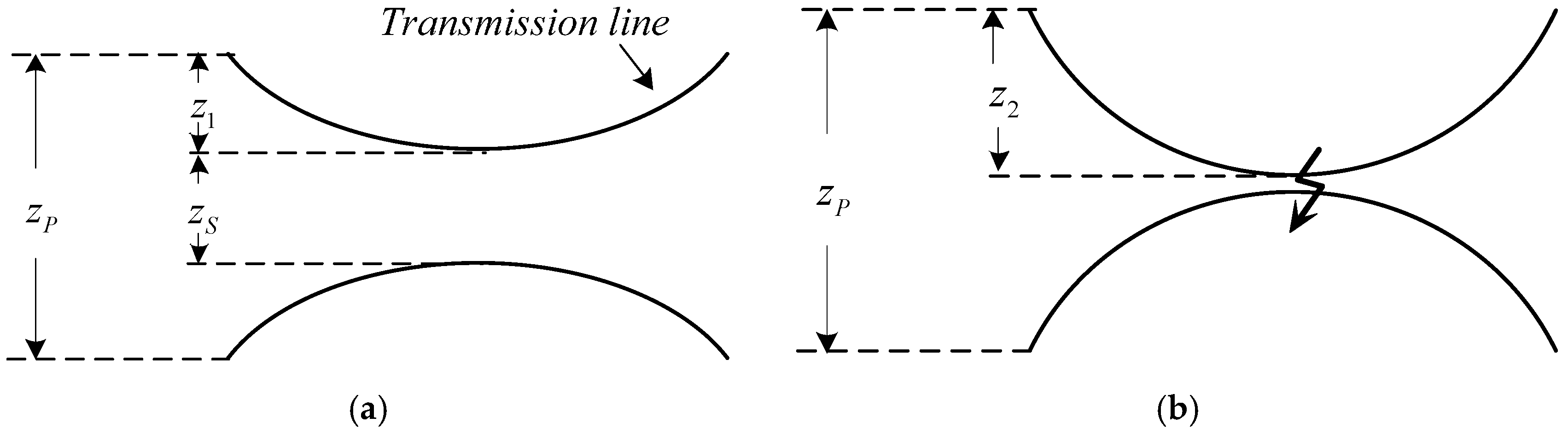
The change of line galloping amplitude (z) will affect the probability of line faults (η) and result in interphase or single phase short circuit which will bring changes to the power system operation mode (Ge).
2.3. Characteristics of Faults Caused by Line Galloping
The faults caused by line galloping are different from typical faults greatly in the following three aspects.
• Random
Line galloping is affected by various factors, such as wind speed, wind direction, icing conditions and transmission lines parameters, which are all of high randomness. Therefore, even in the same meteorological situations, the results of line galloping are also different. The single simulation of a fault scenario of high randomness is valueless. Thus, massive simulations need to be deployed to offer the statistics results that can provide guiding significance to the power grid.
• Clustered
Transmission lines are separated by towers, which ensure the independence of each section of transmission lines. Therefore, the line faults caused by line galloping may happen in different lines simultaneously. Unlike chain faults, clustered faults are more of a threat and harder to predict.
• Long time scale
The process of wind threatening a power grid can last for tens of minute or even several hours. Thus, compared with a transient process of a few seconds’ duration after a fault, the simulation of fault scenarios over such a long timescale is a great challenge.
3. Simulation Framework of Faults Caused by Line Galloping
3.1. Simulation Framework of Faults Caused by Line Galloping
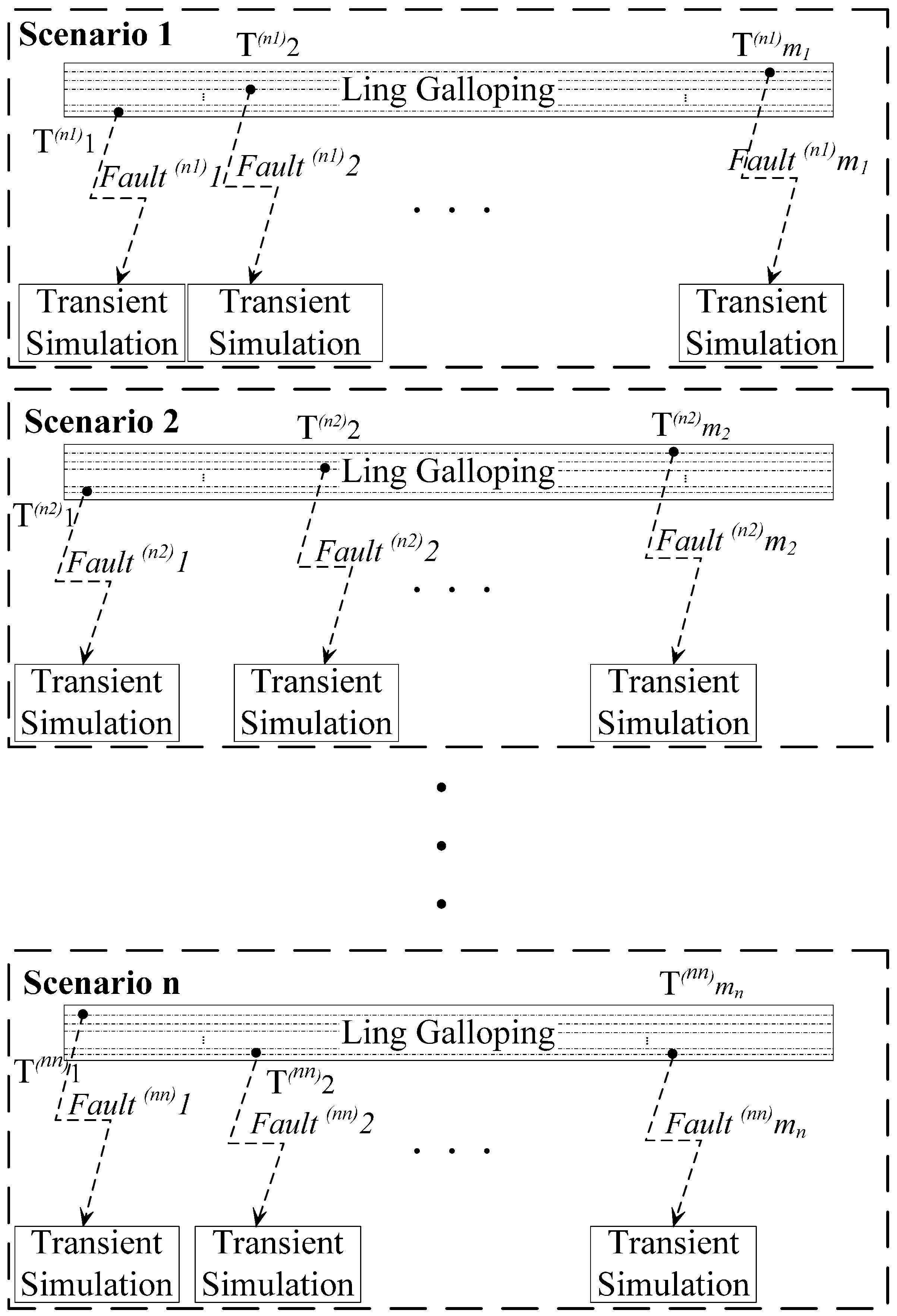
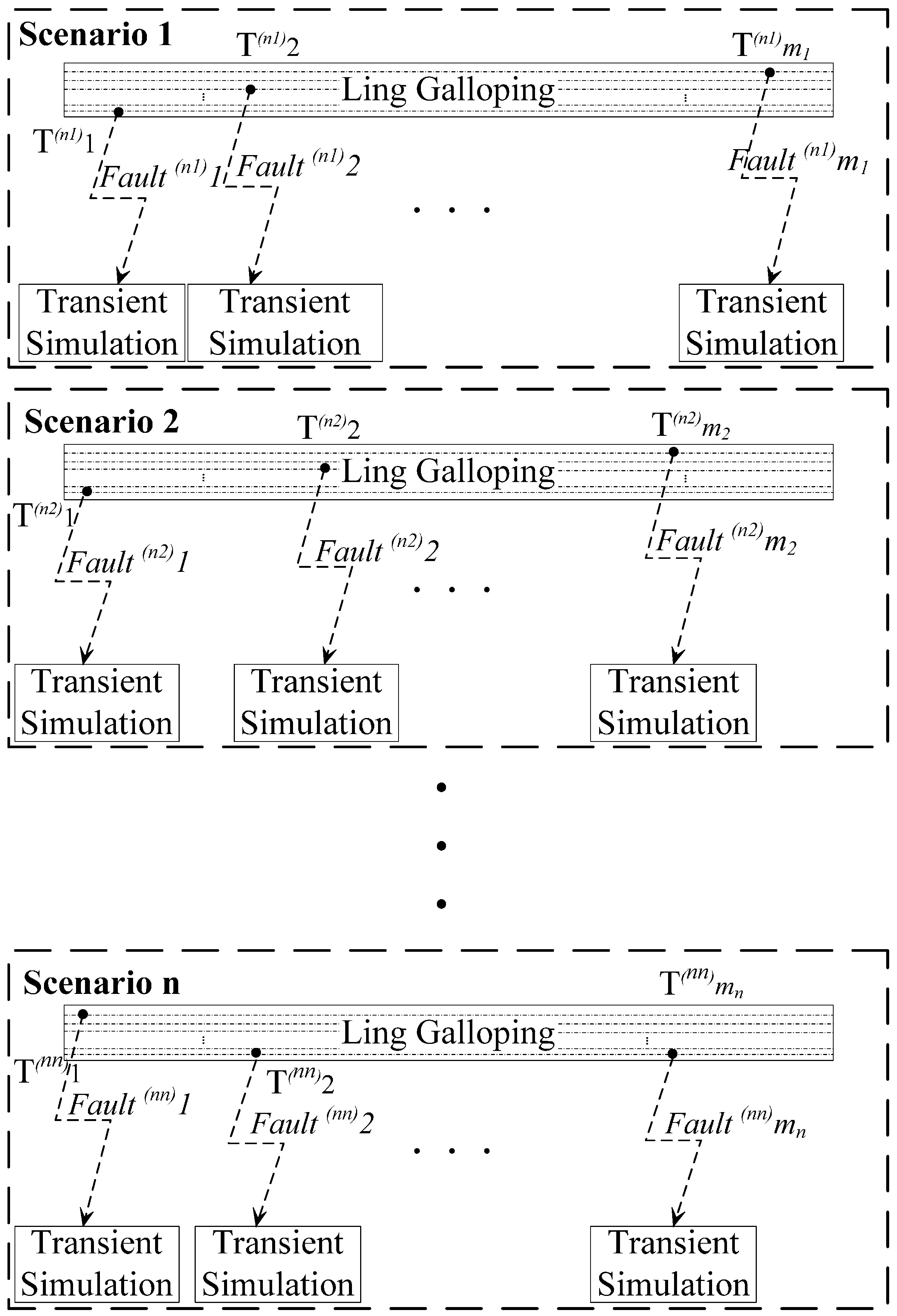
The clustered cascading faults caused by line galloping are hard to simulate with traditional simulation methods, as they are of high randomness and long timescale. Therefore, an improved numerical simulation framework is proposed, as shown in
Figure 1. In the framework, multiple fault scenarios with the same meteorological information are simulated, and statistical results are analyzed. For every fault scenario, line galloping and power system dynamic processes are included. The simulation of line galloping lasts for the whole period, and power system simulation is triggered when line faults occur.
As mentioned above, power system faults caused by line galloping are of high randomness, clustered, and have a long timescale. In this simulation framework, corresponding solutions are put forward.
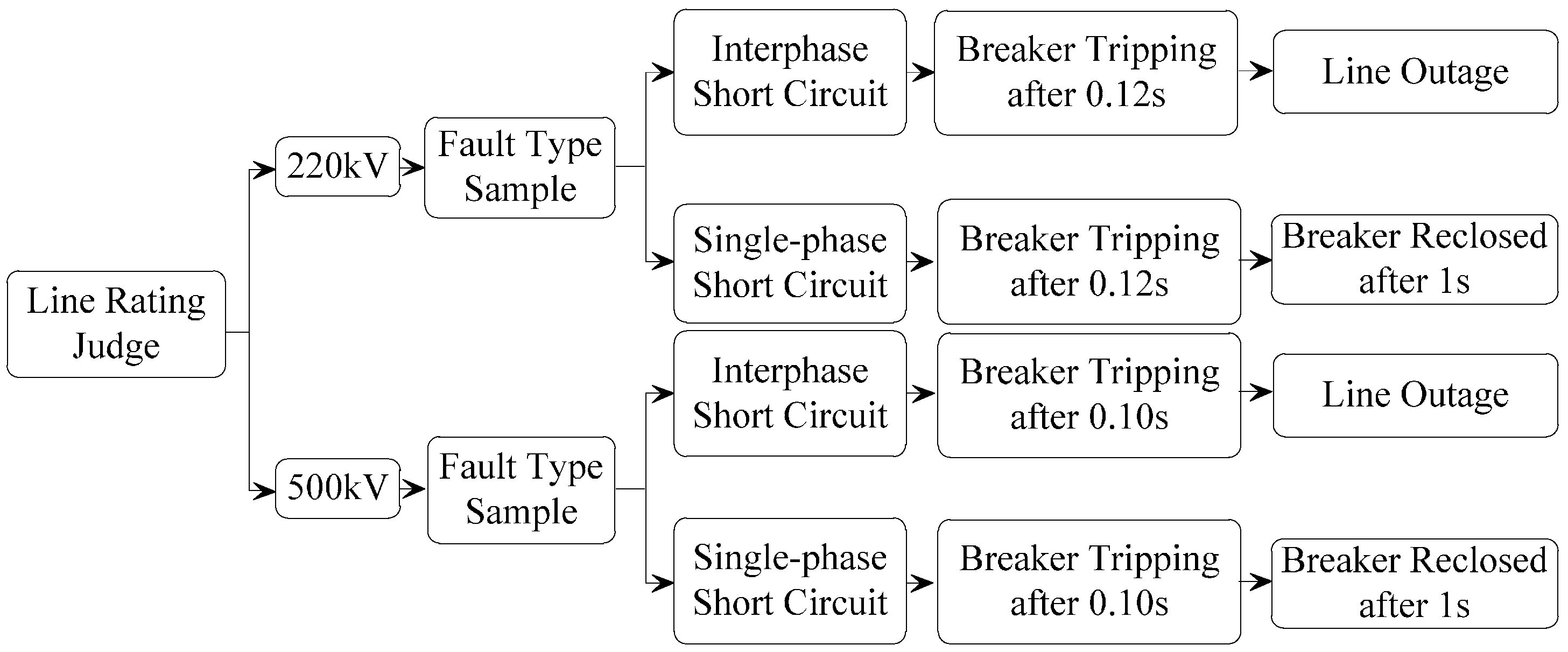
First, in each scenario, the simulation parameters are all random, such as fault location, type, and duration. Fault probability is calculated based on the comparison between line galloping amplitude and phase-to-phase distance. In our research, the single-degree-of-freedom model of transmission line is adopted. The transmission lines are represented with the midpoint of lines of equivalent clustered (or equivalent moment of inertia) and stiffness. As the line-galloping amplitude of the midpoint is largest, fault probability is also highest. The fault location is always chosen as the midpoint of the transmission line. Fault type (interphase or single-phase short circuit) will be determined before performing numerical simulations. The probability distribution for fault type adopted in this paper is based on the statistics data of a province power grid of China. The fault probabilities of interphase and single-phase short circuit are set as 0.278 and 0.722, respectively. Fault duration is related to the fault type.
Therefore, fault scenarios are simulated for
n times with the same meteorological situation and power grid configuration and parameters. Then, the amplitudes of line galloping are calculated for every transmission line simultaneously. The fault in every transmission line is independent of each other, which can simulate clustered faults in multiple transmission lines. Finally, three processes that are greatly different from each other in time scales are simulated in one framework with different steps and periods, which will be discussed in detail in
Section 2.
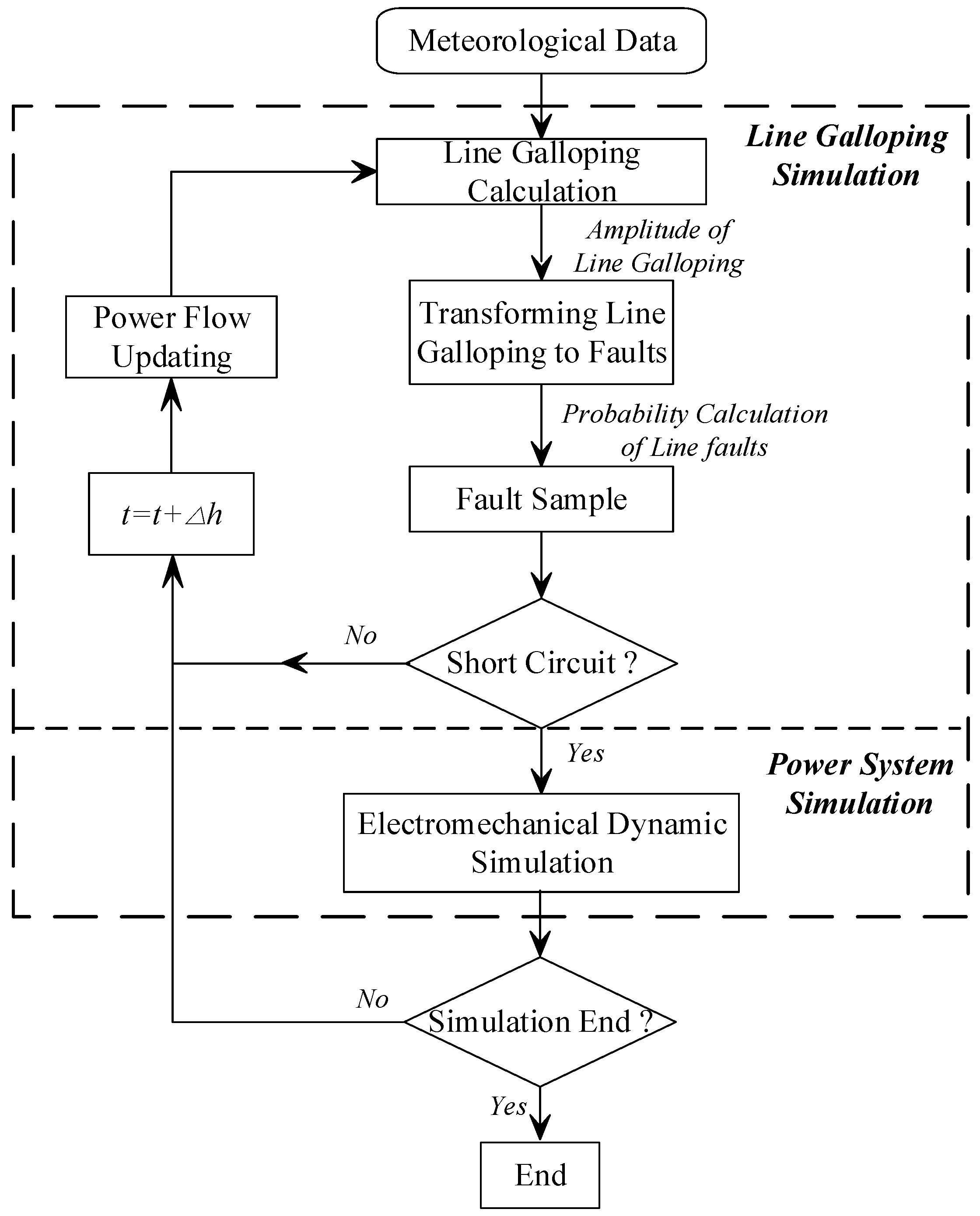
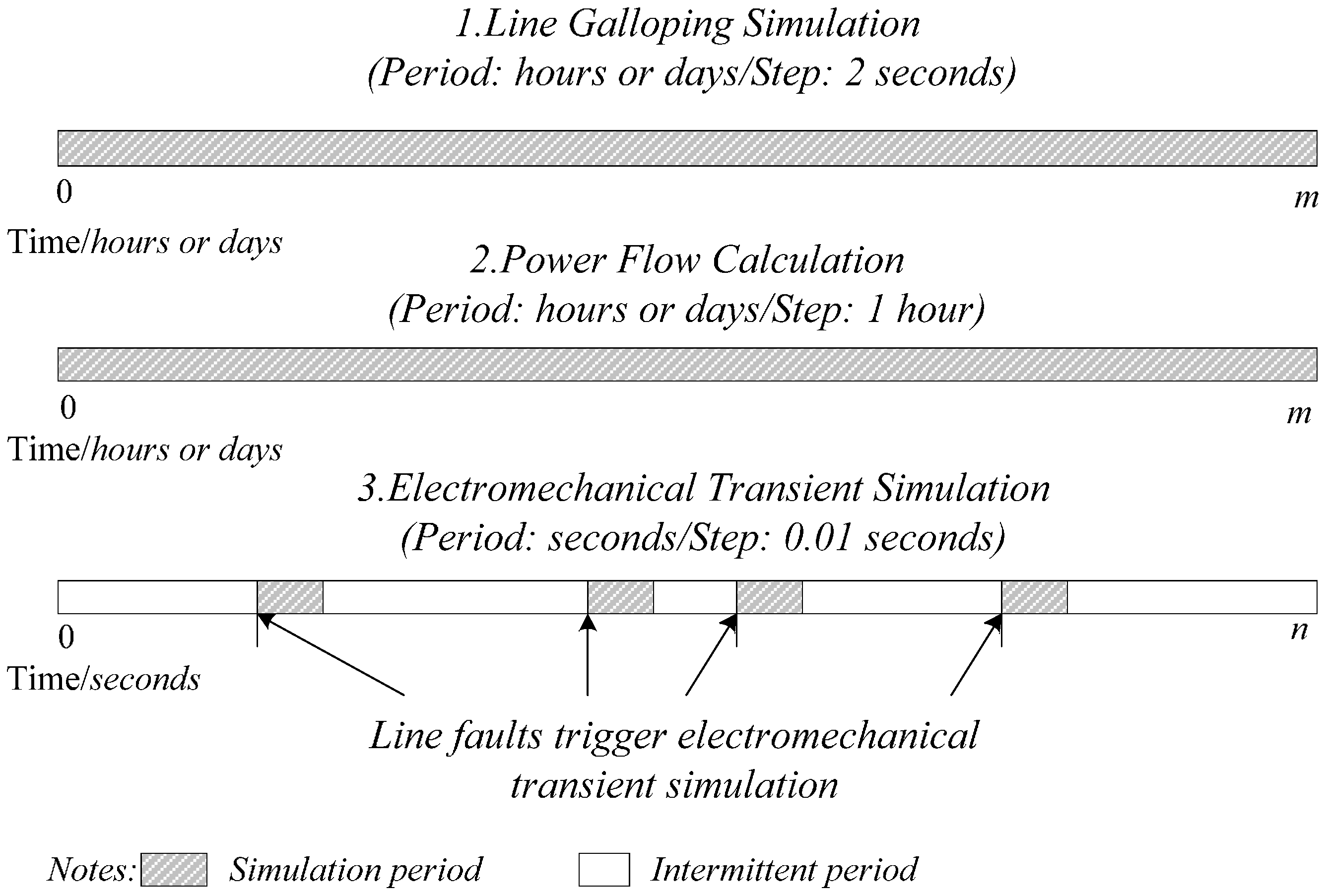
3.2. Simulation Process of Fault Scenarios
In the fault scenarios of the simulation framework, line galloping and electrical dynamic processes are combined, as shown in
Figure 2.
The following steps are to be deployed in the simulation processes.
• Meteorological data
Meteorological data, including wind speed, wind direction, and ice loading, are the input of the line galloping amplitude calculation model. As the meteorological monitoring system in the actual field of transmission corridors is not sufficient, forecasted meteorological information is applied in the platform.
• Line galloping
Model of line galloping mainly refers to the detailed description of galloping trajectory or amplitude of line galloping. In this paper, only the amplitude of line galloping is necessary for the calculation of line fault probabilities.
• Interface of line galloping and line fault
The amplitude of line galloping is related to the probability of a line fault. Based on this relationship, and the output of the line-galloping model, the probability of line fault can be obtained.
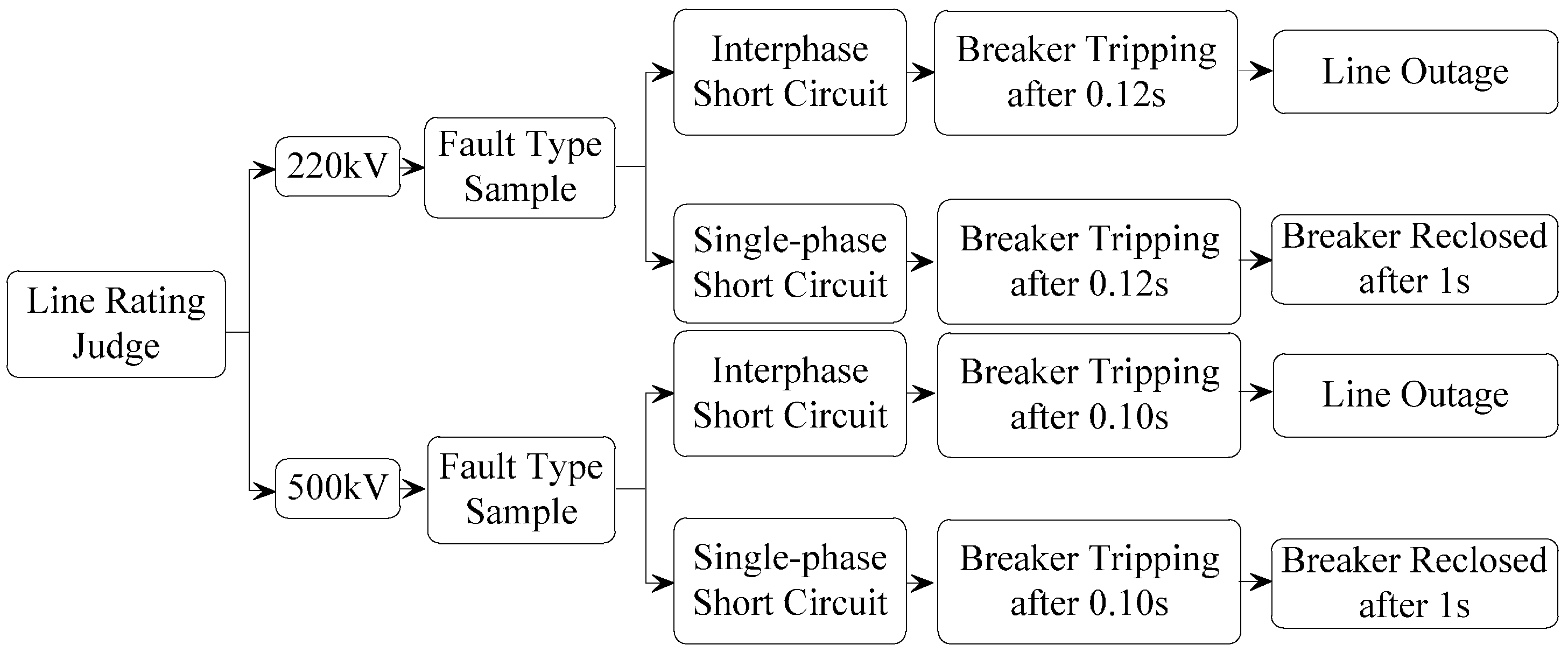
• Fault sampling
Line galloping may cause interphase short circuit or single-phase short circuit faults, which is related to the amplitude of line galloping and of high randomness. Therefore, through fault sampling, fault type and other fault information can be obtained.
• Power system numerical simulation
In the calculation of line-galloping amplitude, when a line fault is triggered, the relevant fault will be set in power system simulation software. Then, a period of electromechanical dynamic simulation will be conducted. When no fault occurs, the power system will be treated as a power flow calculation.
5. Case Studies
The simulation framework is deployed based on PSS/E, and the following assumptions are made.
The ice accretion thickness is constant during the simulation period. The shape of ice is also assumed fixed.
Weather data are all assumed to be forecasted information, which are simulated based on actual field data.
The accumulated mechanical harm of wind galloping on the structure of towers or other structures is neglected.
5.1. Case Descriptions
5.1.1. Grid Data
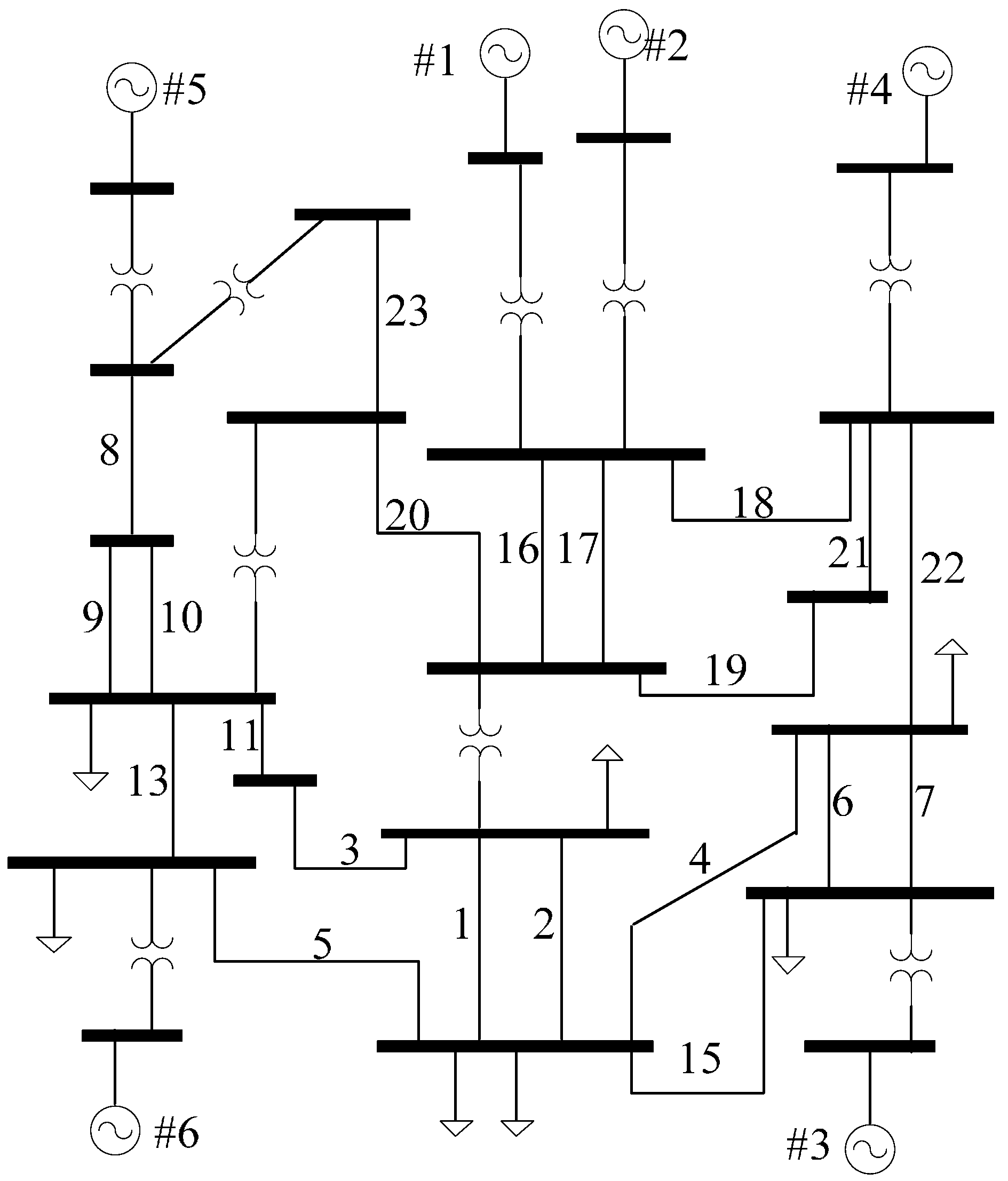
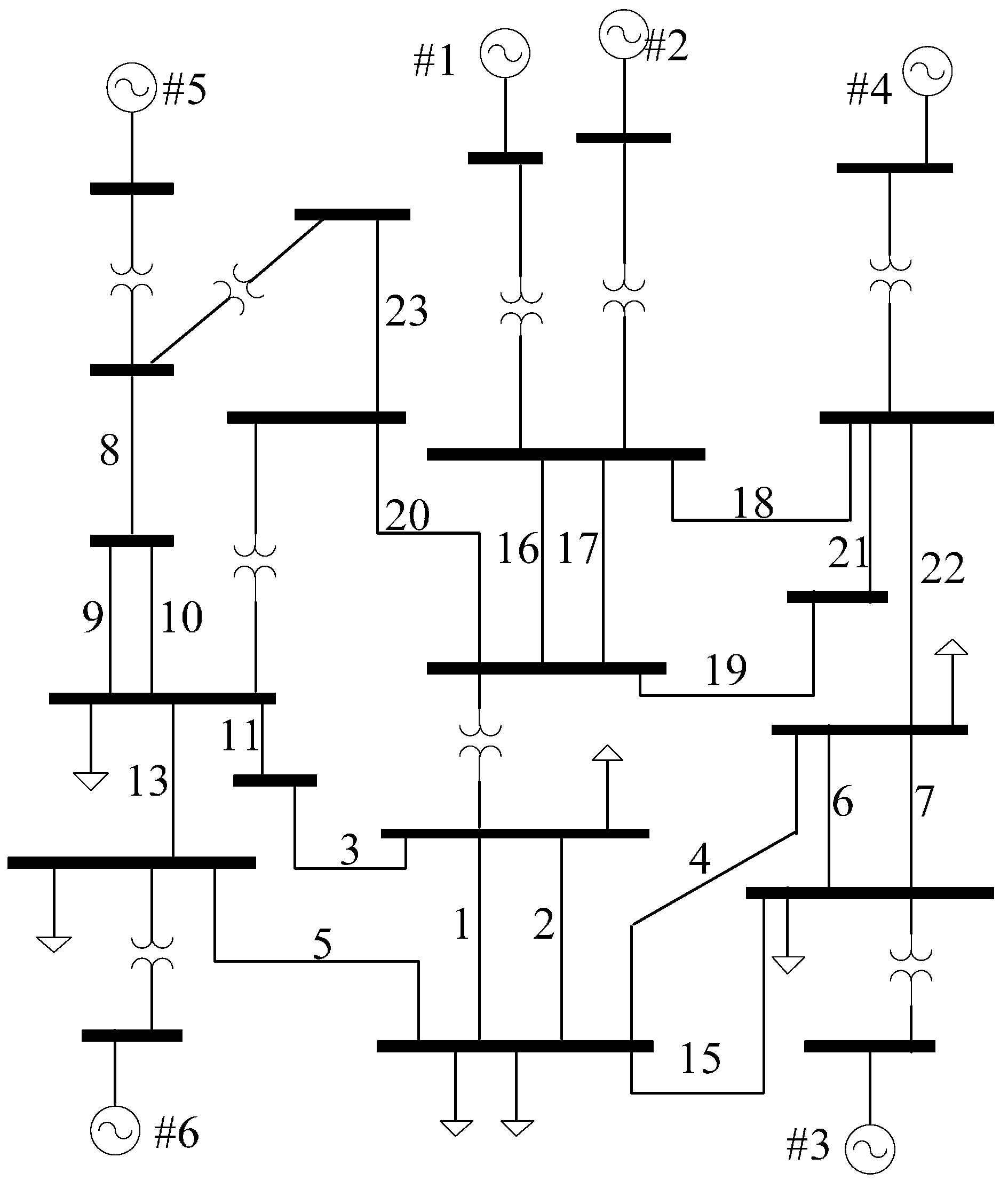
Case studies were conducted using the 23-bus model provided by PSS/E, as shown in
Figure 8. In the test system, six machines and 23 nodes are all exposed to strong wind.
The parameters of transmission lines include voltage level, cross-sectional area, tensile force, line length, and so on. Taking eight of them as an example, the detailed parameters are shown in
Table 1.
For transmission lines of 220 kV and 500 kV, the phase distance and safety distance are as shown in
Table 2.
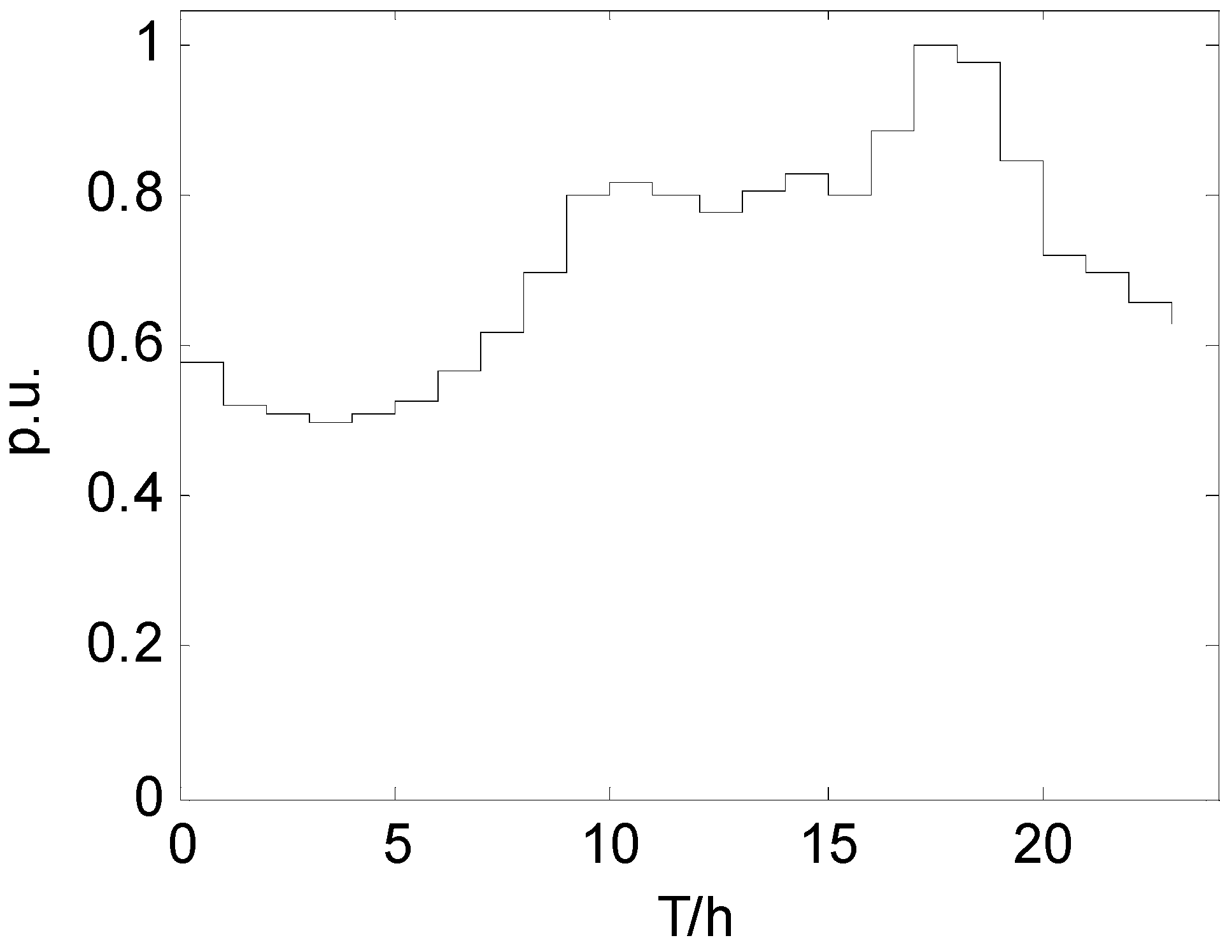
5.1.2. Weather Information
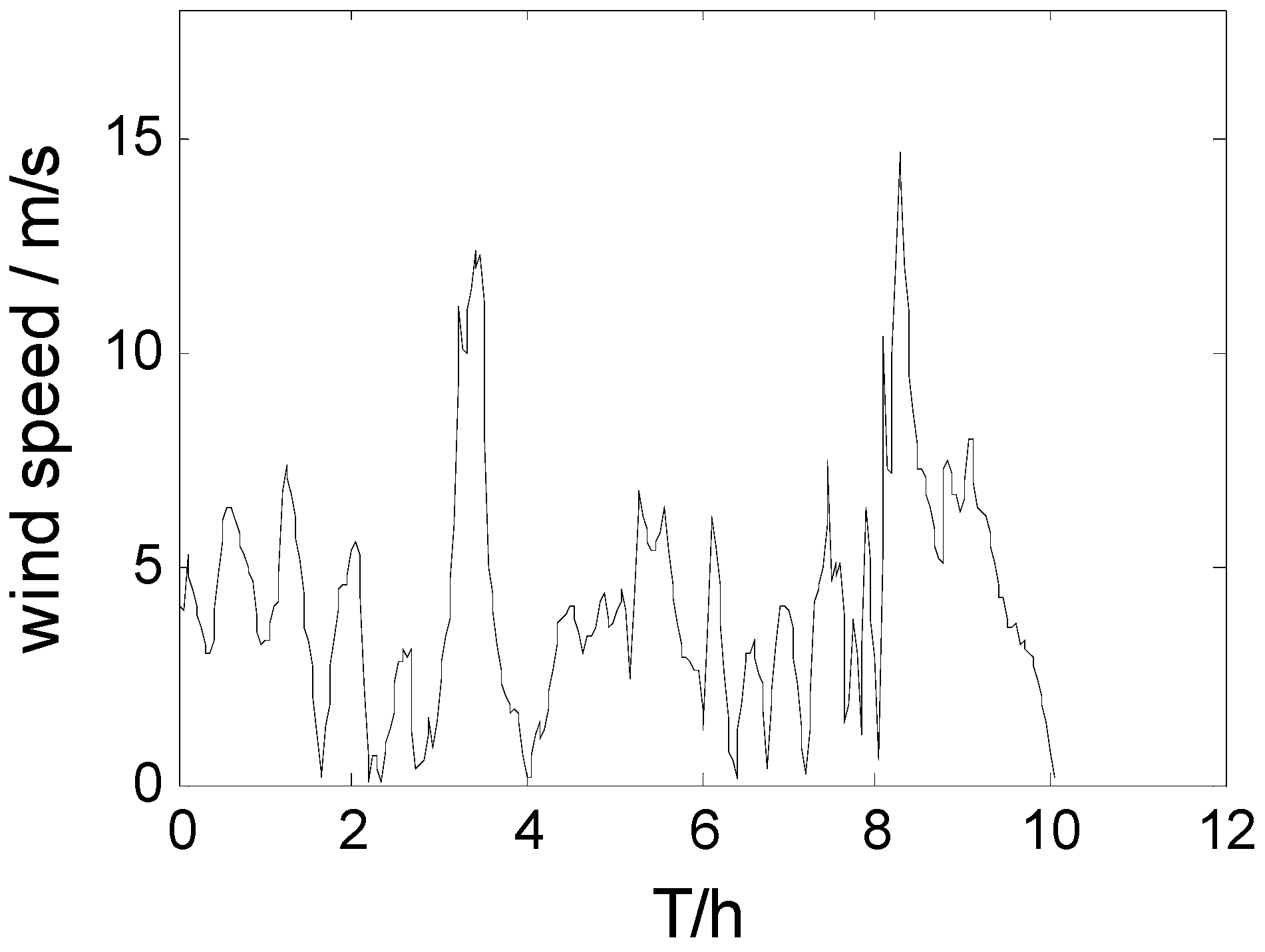
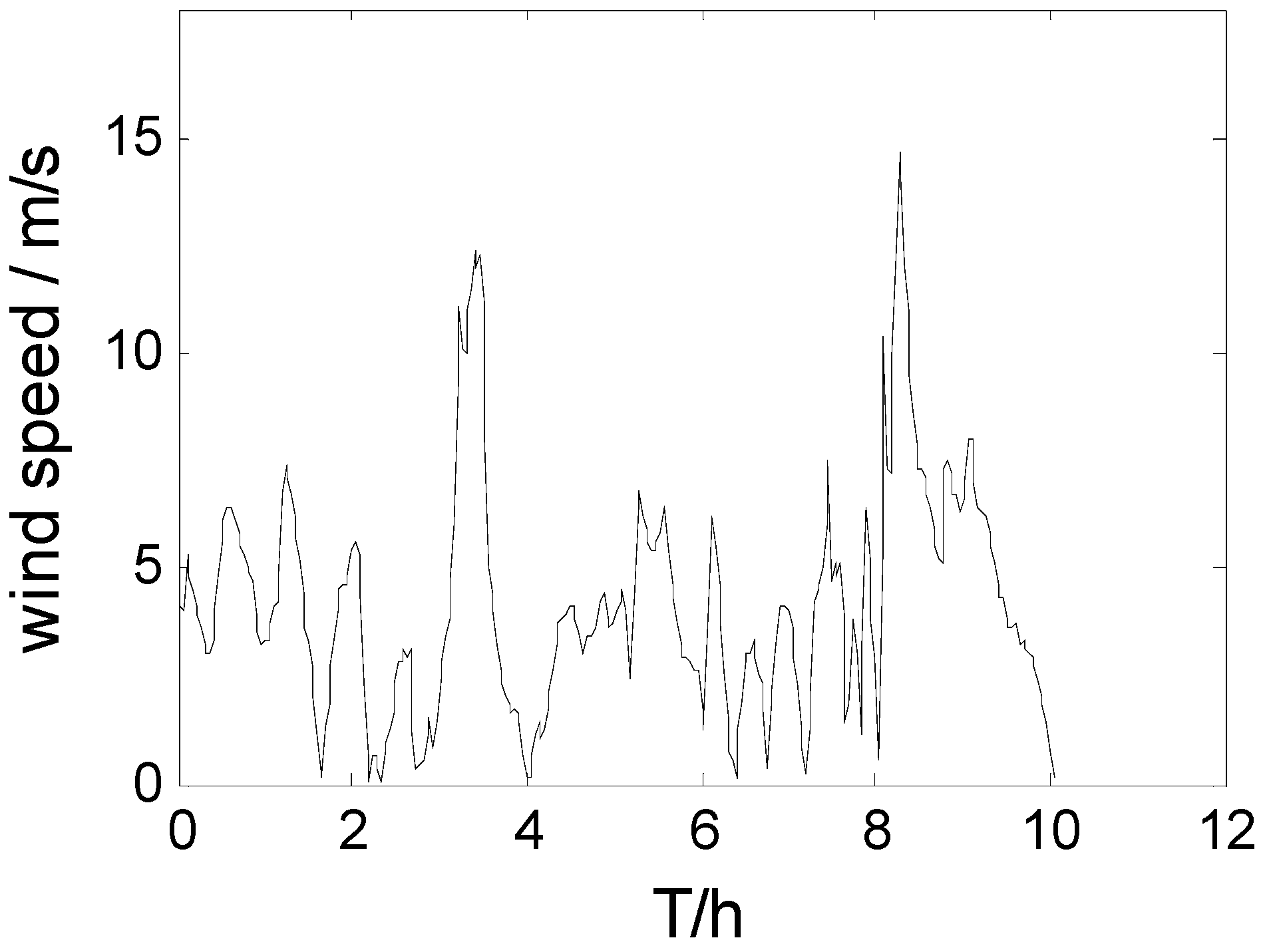
Many meteorological factors will affect the occurrence of line galloping, such as wind direction, wind speed, temperature, and precipitation. Under appropriate temperature and precipitation, ice accumulates on transmission lines and turns into oval ice accretion, which is easy to trigger line-galloping events. In the simulation period of this paper, it is assumed that the ice formation at a certain temperature and precipitation is constant. After the calculation of wind speed and wind direction, the wind speed perpendicular to the long axis of the icing ellipse is shown in
Figure 9.
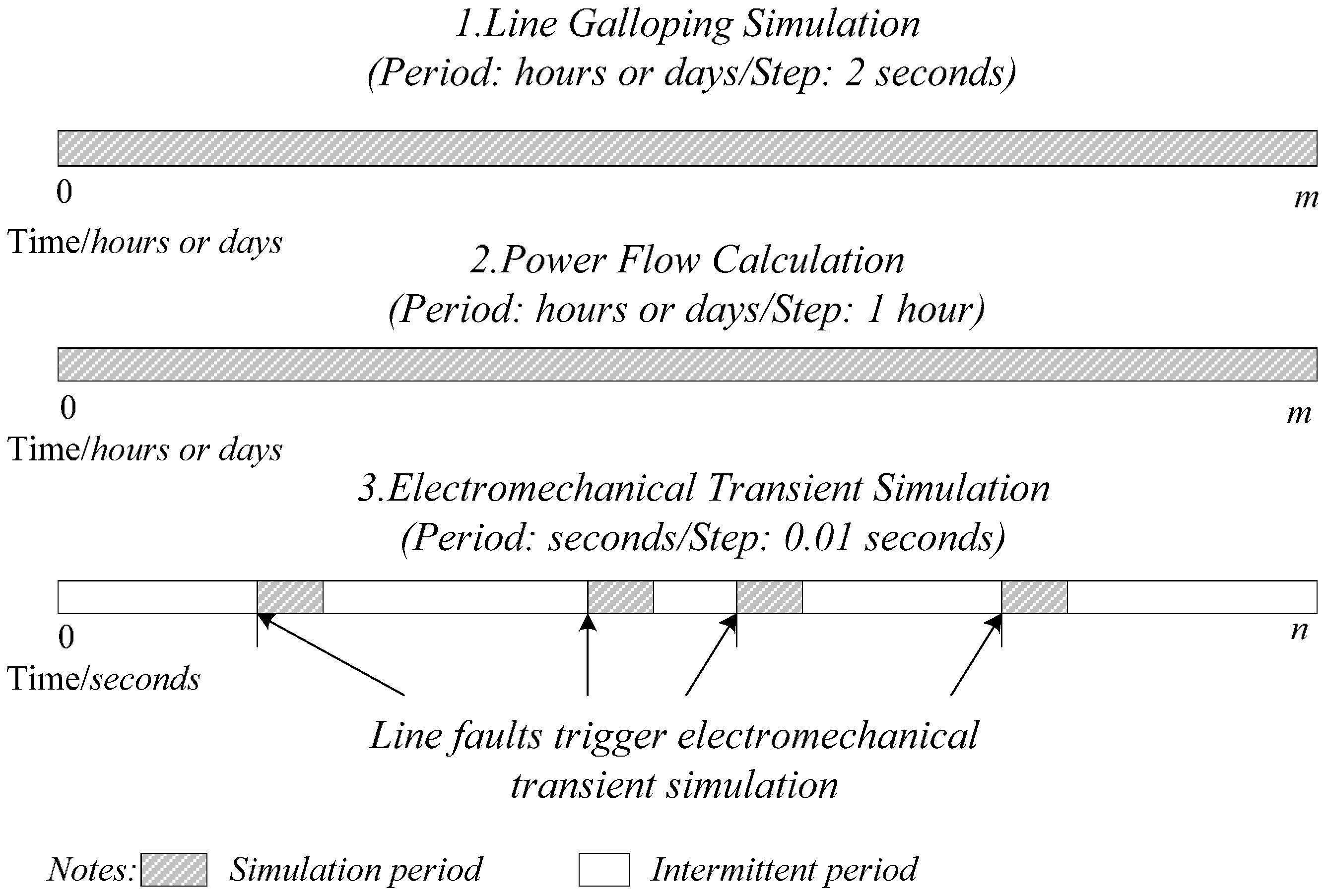
5.1.3. Simulation Settings
The simulation periods and steps of three processes are set as
Table 3.
Line galloping is simulated throughout the whole period with the step of 2 s. Power flow is updated every 1 h to consider load fluctuation. Transient simulation is triggered for 10 s when line faults occur, with the step of 0.01 s. The result of current transient simulation will be the initial state of transient simulation the next time.
5.2. Simulation Results
Line galloping is an accident of high randomness, which is reflected through the probability sample module in the simulation. Thus, the results of every simulation will be different. Line galloping is a complicated process of high randomness. Even in the same meteorological environment, instances of line galloping differ from each other. Therefore, the probability statistics method based on the simulation of large numbers is adopted. With more simulations, the result will be more precise. On the other hand, the time cost will also grow. Considering both simulation accuracy and efficiency, 100 times are applied in our research. The statistic results of 100 cases are listed in
Table 4.
5.2.1. Analysis of Unstable Scenarios
Take an unstable fault scenario as an example, as shown in
Table 5.
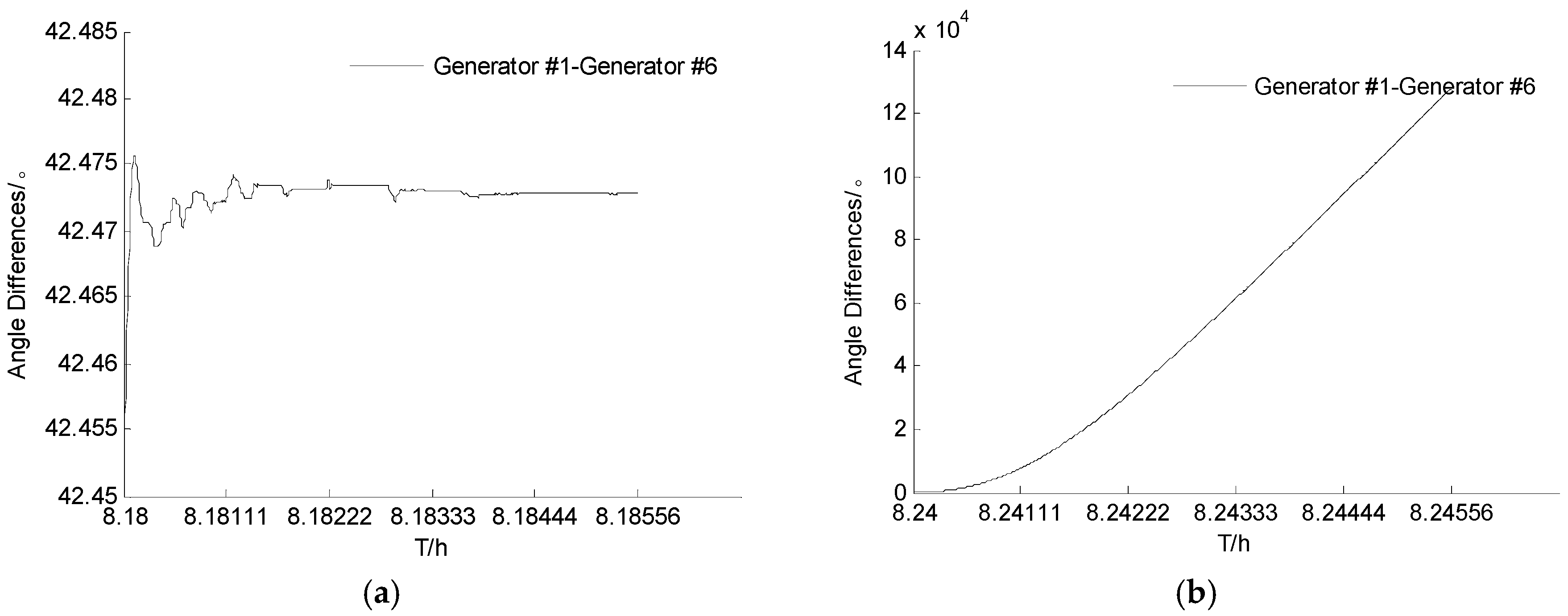
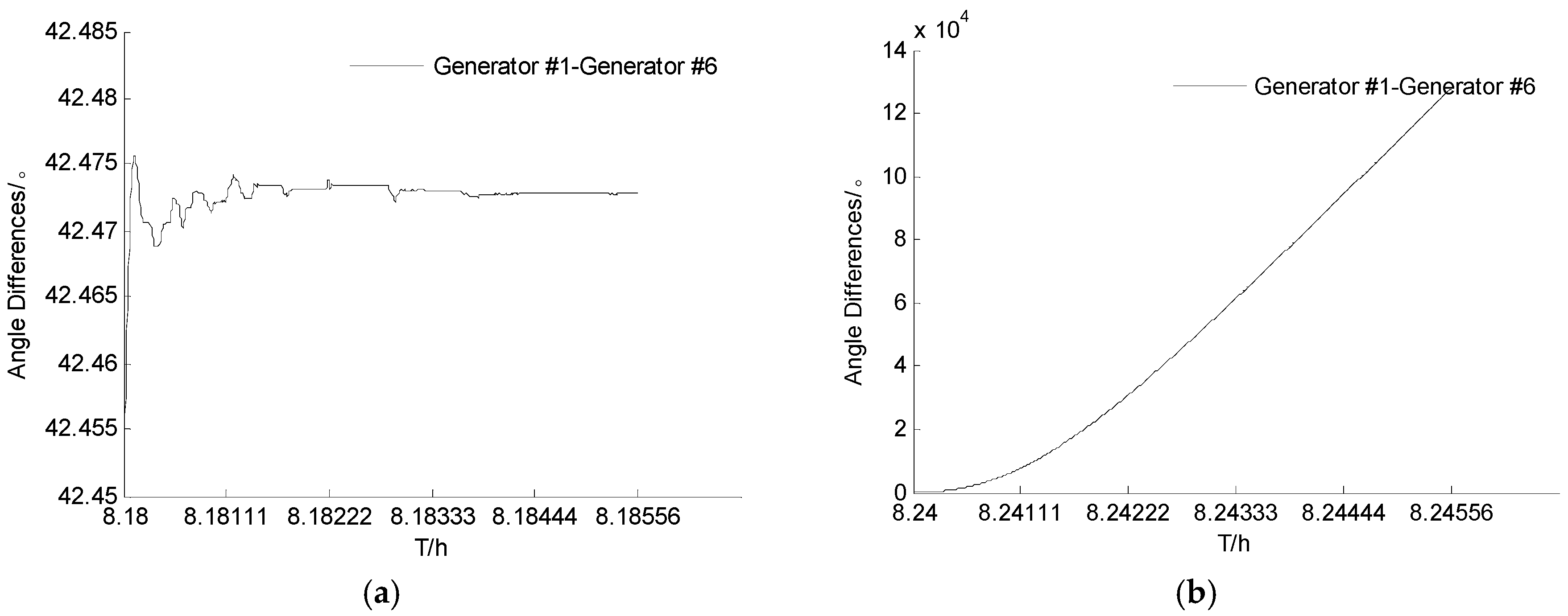
Suffering above listed cascading faults, the biggest angle differences occurred between generator #1 and #6, as shown in
Figure 10. In Fault No. 2, 5 and 9, line #9, #5 and #14 have been tripped due to interphase short circuit. Therefore, the interphase short circuit and line tripping of line #13 in Fault No. 12 result in a partial blackout of the power grid.
5.2.2. Analysis of Stable Scenarios
Take a stable fault scenario as an example, as listed in
Table 6.
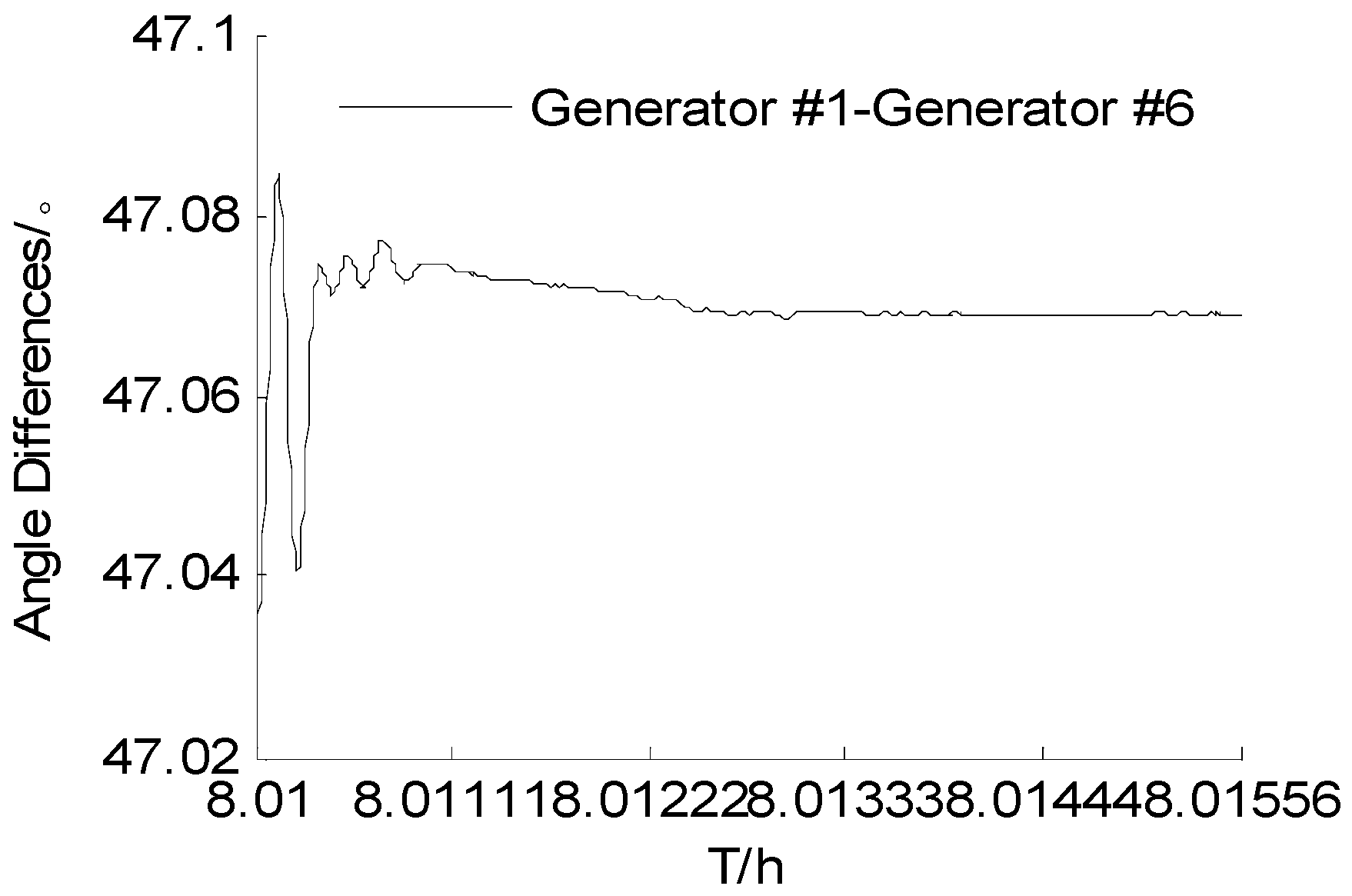
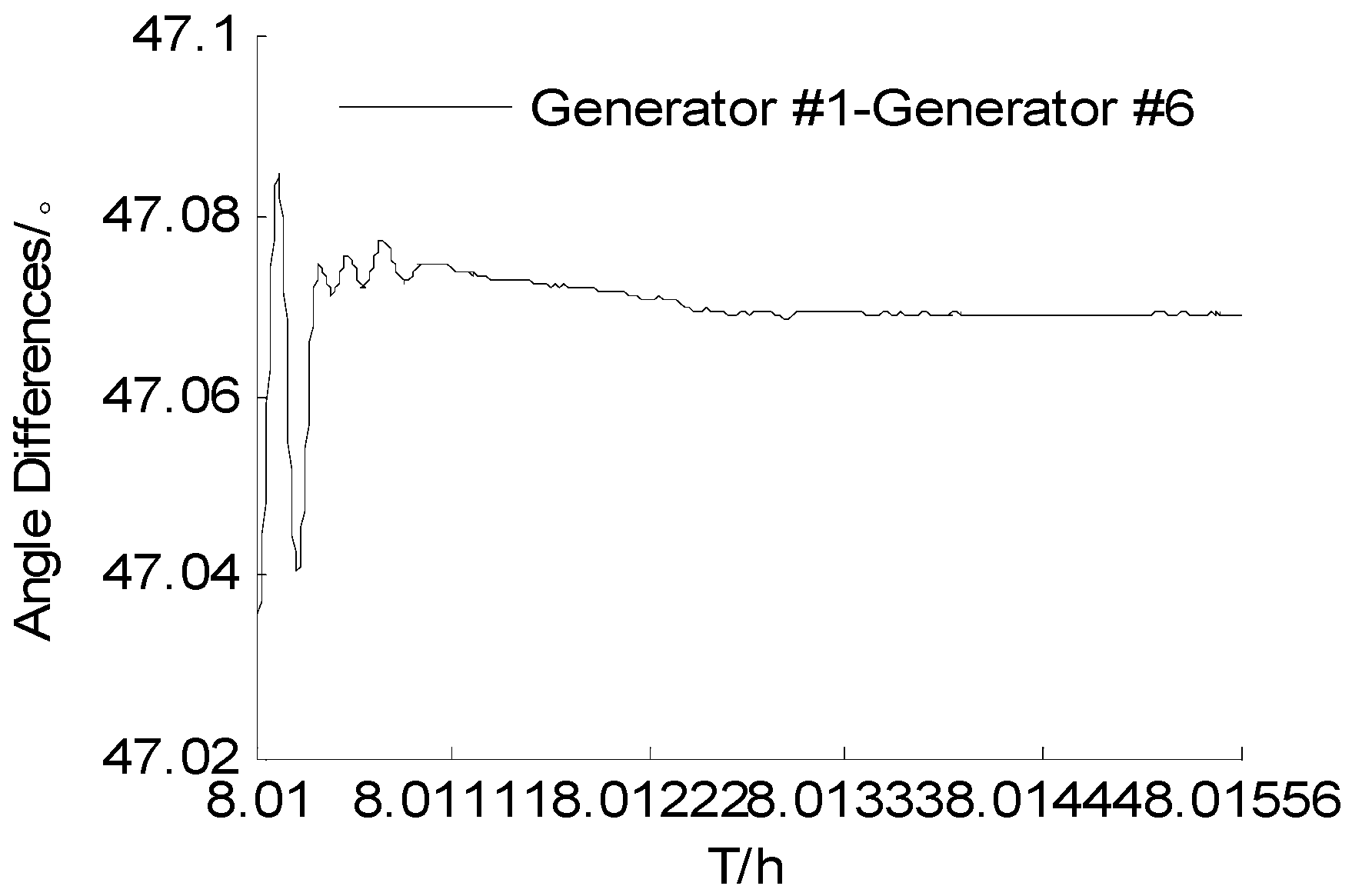
In the fault scenario, when fault No. 1 is triggered, the angle differences between generator #1 and #6 fluctuates out of the short circuit of line #1, as shown in
Figure 11.
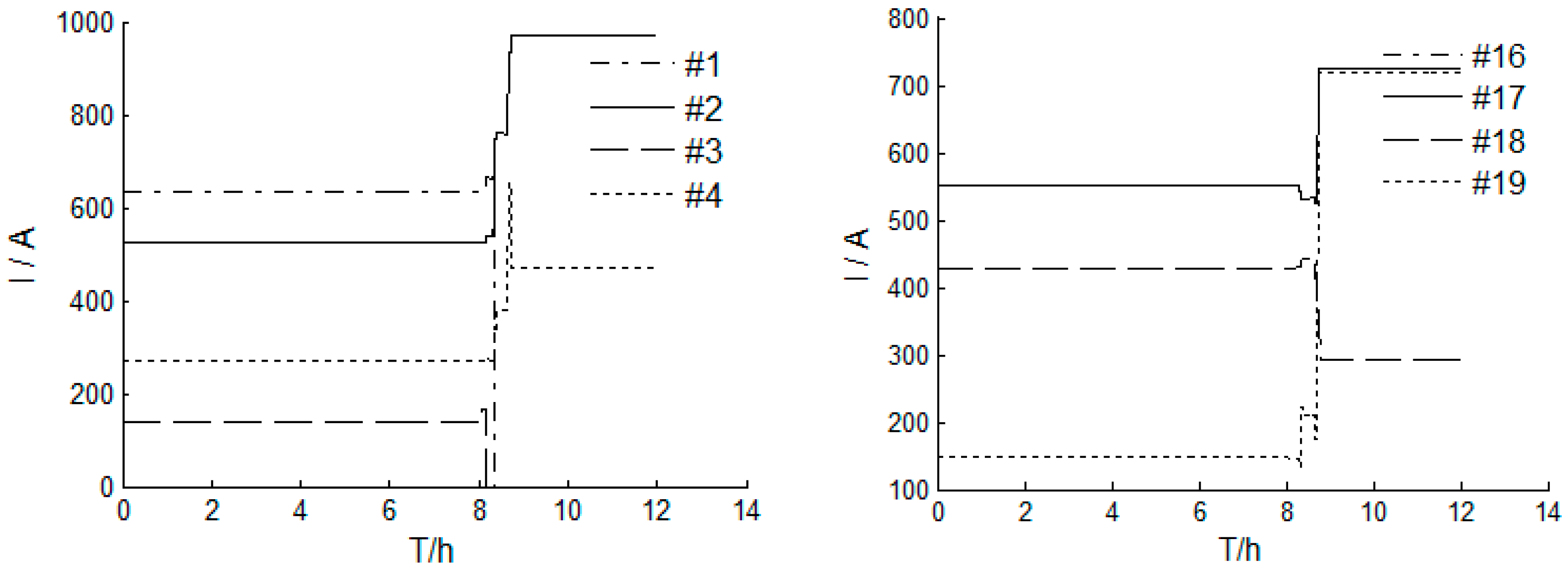
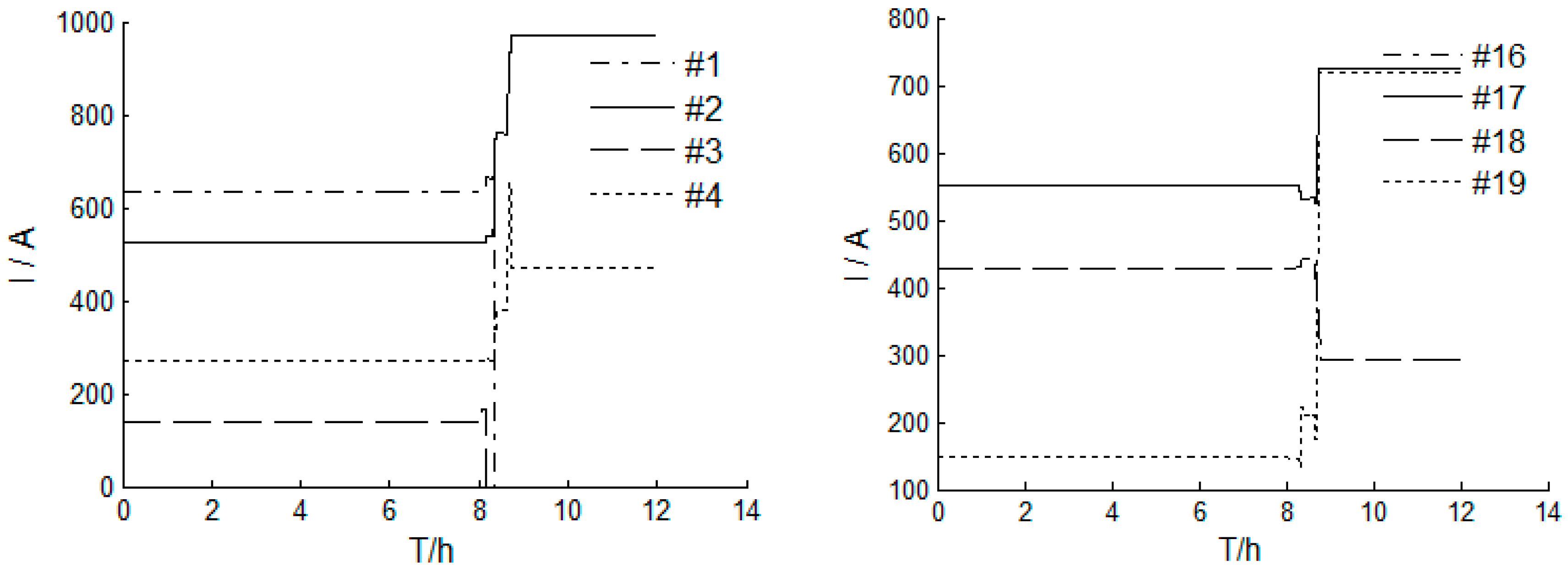
Electrical variables also change with the occurrence of line faults. Take the eight transmission lines listed in
Table 1 as an example. When line #3 and #1 are broken at 8:08:24 and 8:21:00, respectively, the line current instantly falls to zero. The current of the other six transmission lines also fluctuate with the influence of single-phase short circuit and line breaking, as shown in
Figure 12.
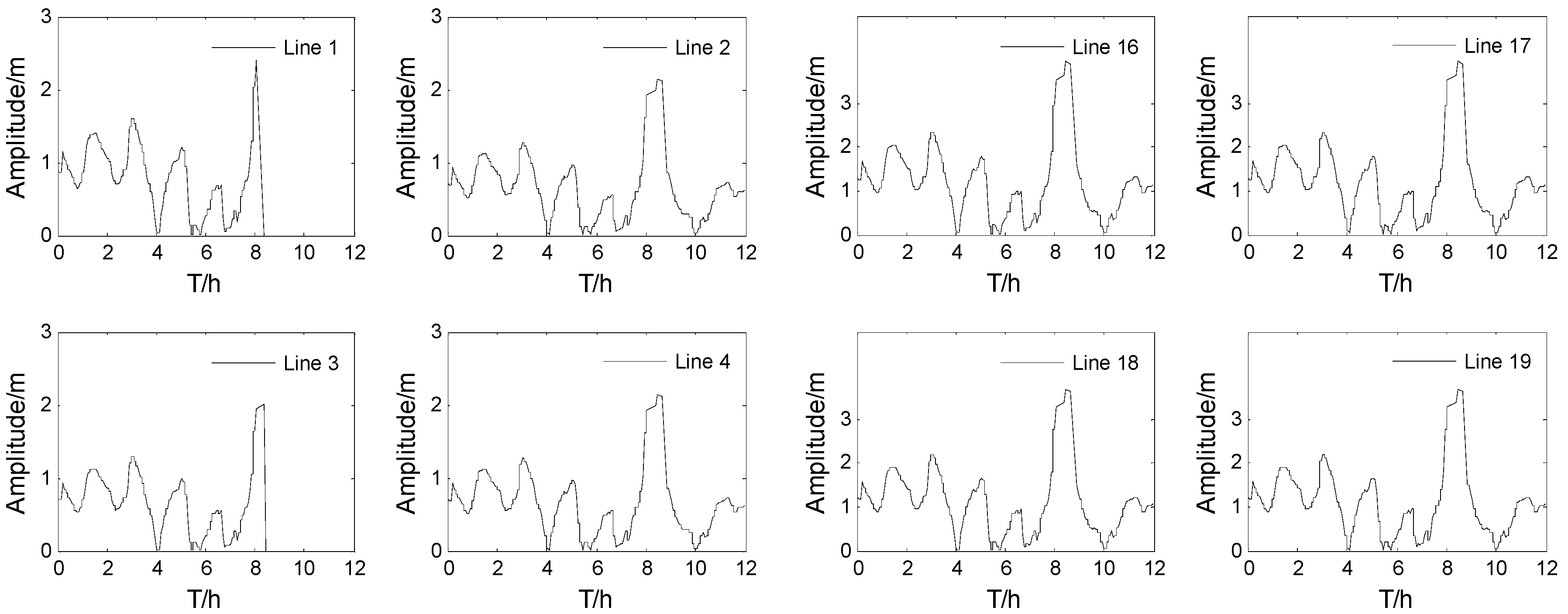
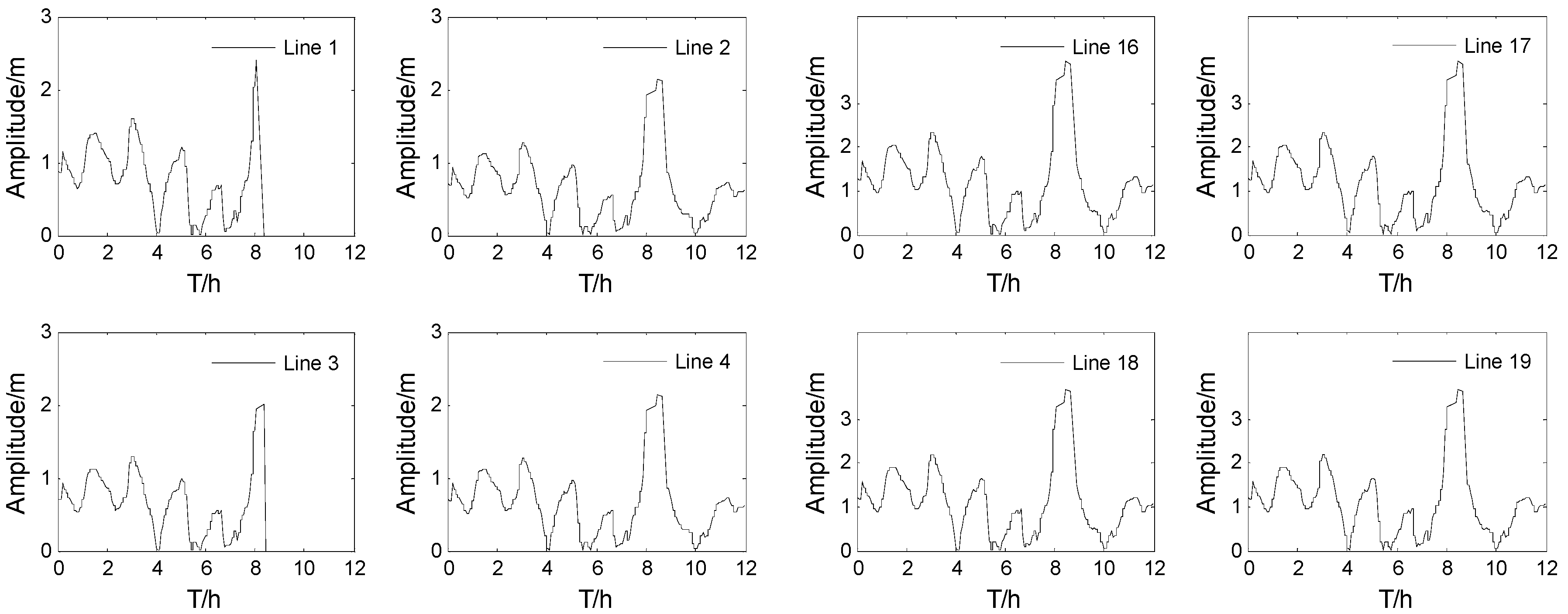
Besides electrical responses, the line-galloping dynamic process also can be acquired as shown in
Figure 13. When interphase short circuit happens in some transmission lines, the corresponding line will be broken, and the amplitude turns to be zero.
5.3. Efficiency of Simulation Platform
In the simulation platform presented above, simulation efficiency is determined by the following parts:
• Calculation of line-galloping amplitude
The calculation of line-galloping amplitude is based on ambient environment, whose core problem is the solution of nonlinear algebraic equations. The calculation is carried out every two seconds, which is determined by the updating of input information.
• Sampling of line fault
Based on the relationship between the amplitude of the line and the fault type, the fault is sampled to determine whether the fault occurs or not. Fault type and detailed settings differ with the voltage level of transmission lines. The sampling is triggered when a short circuit fault occurs.
• Power flow calculation
Power flow is calculated to update the load data every hour.
• Electromechanical transient simulation
When line faults occur, electromechanical transient simulation is triggered and lasts for 20 s. The times of the execution of this part depend on the times of occurrence of faults.
Eight cases were tested in a desktop computer with a CPU of four cores (3.20 GHz) to illustrate the efficiency of our simulation platform. The results are shown as
Table 7.
According to simulation results, a line galloping of 10 h can be simulated in several minutes. When the case is more complex, simulation time will be longer. However, the high efficiency of simulation can ensure the application of this simulation platform, which can provide appropriate advice and guides for operators.
6. Discussion
The hybrid simulation framework of a power system considering line galloping is constructed to simulate the random clustered, long-timescale cascading faults caused by strong wind weather conditions. The impact mechanism and dynamic processes between power systems and meteorological systems are revealed. An extended software package for PSS/E is developed to carry out the hybrid simulation. Based on this platform, two dynamic processes of power systems and meteorological systems with different time scales are combined into one simulation and can be solved efficiently. The power system simulation concept is extended by considering the meteorological system.
The distributed computation is a good approach to further improve simulation efficiency, which will be carried out in the future. The simulation processes last for the whole period in which every module interacts with each other. However, simulations are conducted for large numbers of times repeatedly with same input information and parameter settings in our framework. Therefore, the simulation can be carried out independently with different computers. The sum results of the simulations will be obtained with distributed computation. The simulation approach proposed in the paper is mainly used for early warning of non-secure situations during the coming of extreme weather. With forecasted extreme weather information, the risk of power grid blackout can be obtained based on the proposed simulation platform. Dispatchers can adjust the operation mode of power grid to reduce losses in the instances of such weather events.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}