1. Introduction
The microgrid has been studied in the last decade, focusing on new forms of the operation of power systems. Because of the microgrid, the power system has shifted away from the conventional centralized operation to a locally distributed form. Distributed generation (DG) such as the renewable energy source and the energy storage system (ESS), which are typical components of the microgrid, have also been continuously studied [
1]. With emphasis on the importance of microgrids, the fields where the microgrid can be applied have been diversified, such as university campuses, military service areas, local communities, and commercial and industrial complexes. Since the above-mentioned areas are generally medium-scale or large-scale systems, if they are composed of one microgrid they become similar to a centralized operation method and increase the burden on management and operations. For medium and large scale systems, therefore, it is appropriate to construct multiple microgrids rather than a single microgrid. In accordance with this trend, in recent years there have been studies focusing on a large number of microgrids, extending from a single microgrid operating mode. A number of microgrid operation schemes have been proposed, including sharing or trading power between microgrids when multiple microgrids are implemented. The operation of multiple microgrids is based on extending a single microgrid operating scheme and is typically a hierarchical structure because it is an extension of the operating structure of a single microgrid. In [
2], optimal operation of a single microgrid is proposed, but the system structure is hierarchical. Based on the model predictive control framework, the alternating direction method of multipliers method and the dual decomposition method are used. This means that the optimization problem of the microgrid is divided into N sub-problems and solved in parallel. Prox-average message passing is applied in the process of solving the problem. In this method, a specific system can be classified as net and device and handled in a hierarchical manner. It is based on updating the output of each device by exchanging information between net and device. Reference [
3] also has a hierarchical structure using a decomposition method. The various components in the microgrid are considered as sub-problems, and the optimum solution for the entire microgrid is obtained while iteratively updating the multipliers. In [
4], this hierarchical distributed optimization method is applied to a large number of microgrid systems. The main purpose here is to minimize the power loss due to the power sharing between the microgrids using Lagrange multipliers. Reference [
5] deals with the scheduling of power transactions of the multiple microgrid with EVs. In this case, the potential price signals considering the dual variables are reflected in the time of use (TOU) price signal, and this price signal is allocated to the respective microgrids so that the power to deal with the utility grid is determined as the optimal value. As a result, the limit on the amount of power trading with the utility grid at the peak is reduced, thereby reducing the cost. References [
6,
7] have also proposed the method for the economic operation and power trading of multiple microgrids in community form. Reference [
6] proposes the power coordination of multiple microgrids for the optimal operation of one community. Based on a hierarchical structure, the amount of power sharing is adjusted through communication between the microgrid agent at the lower level and the microgrid center agent at the upper level. Reference [
7] proposes a power trading scheme in a community microgrid that includes the AC microgrid and the DC microgrid. It is proposed that the output of the microgrid and the amount of power trading between the utility grids by adjusting the droop curve of the converters be adjusted. While all of the previous literature considers the grid-connected operation, references [
8,
9] consider the islanded operation. In [
8], a dual variable is assumed to be an electricity-selling price, and then a power-trading scheme between the microgrids is proposed. According to the law of supply and demand, the selling price of electricity among the microgrid is determined by considering the change of the price by the load. Reference [
9] proposes a distributed power sharing scheme using the average consensus algorithm. Power sharing is performed only in an emergency and determines the amount of power to be shared in proportion to the available reserve power of each microgrid. Other studies that do not consider power sharing directly have proposed various operating strategies of multiple microgrid systems in grid-connected or stand-alone modes [
10,
11], and multi-DC microgrid operation and control strategies are also discussed recently [
12,
13].
Most of the studies on the operation of the multiple microgrid in the grid-connected, described above, assume the topology with one PCC, and the mathematical models and assumptions of the components used to solve the optimization problem are needed. Typically, it is assumed that the objective function of the battery is arbitrarily convex quadratic. In practice, however, the topology of multiple microgrids may have multiple feeders as well as a single feeder. For example, for two microgrids owned by different owners, if each microgrid has a different PCC, the operating method may be different in terms of power sharing.
Components with clearly defined mathematical models such as generators can be used as mathematical models for optimal operation, but the elements such as the energy storage system (ESS) are defined according to the user’s convenience, that is, they depend on the purpose of operation. In recent studies, by using the relationship between the output and the efficiency of the battery, the life-time cost or life-cycle cost of the battery can be modeled and the battery can be operated according to these models [
14,
15,
16]. However, few studies have been conducted in the long-term, considering the life cycle cost of the battery. In addition, according to a report on energy storage trends published in 2017, the cost of utility-scale energy storage systems is expected to gradually decrease [
17]. As a result, the operation of an ESS that considers lifetime costs is not necessarily considered effective, and it may be better to replace the battery after obtaining the maximum benefit because of the cost reduction of the ESS. For this reason, when an ESS runs in a microgrid, it cannot be guaranteed to have a cost function. When a microgrid is constructed only with elements that do not have a specified objective function, such as renewable generation or ESS, it is no longer possible to derive an optimal operating plan considering the power sharing based on the incremental cost of generating the components.
Therefore, a distributed operation scheme is proposed considering power sharing between multiple microgrids, consisting of components that have a multi-feeder topology and components that cannot have power generation costs, and cost optimization for the entire system. The proposed operation scheme for the multi-microgrids system has a hierarchical structure. It consists of an upper system that manages the entire microgrid called the microgrid of microgrids (MoMC) and the microgrid energy management system (MG-EMS) that exist for each microgrid operation and management. The proposed operating scheme achieves distributed optimal operation of the multiple microgrid through appropriate coordination between the upper and lower systems. The purpose of each microgrid located in the lower ones is to adjust the peak power of the microgrid, and the purpose of the upper system is to adjust the optimum point for the entire system. In addition, in the case of islanded operation, the scheme for performing power sharing within this hierarchical structure can be used to increase the reliability of the multiple microgrid system. Power sharing can be accomplished through the coordination of each microgrid EMS with the upper system, MoMC, providing power from a microgrid with sufficient reserve power to a microgrid with deficient power.
In summary, this paper differs from previous studies in the following points.
- (1)
It includes a power sharing strategy among microgrids applied in multiple microgrid systems with a single feeder as well as multiple feeders. Due to the power sharing achieved through the proposed coordination algorithm in the MoMC, the peaks of each feeder are adjusted to achieve a total cost savings.
- (2)
For units that do not have an objective function, it is difficult to achieve power sharing by updating dual variables such as Lagrange multipliers or by matching the incremental cost of the objective function through the consensus algorithm. Therefore, there is a need for a way that power sharing can be performed between microgrids in a multiple microgrids system that is connected to the utility grid. That is, when the power sharing is performed, if the microgrid includes only power generation units, which cannot determine the cost function, the power sharing can be achieved by applying the proposed algorithm.
- (3)
The proposed power sharing strategy is based on the distributed optimization of multiple microgrid systems in a hierarchical structure. Based on the optimization results performed by each microgrid, a coordination algorithm in the MoMC is performed and the results are reflected in each microgrid. The coordination algorithm performed in MoMC is a simple operation as opposed to solving complex problems such as optimization problems, and since each microgrid performs local optimization, the time required for determining the schedule of the entire system is reduced significantly.
Section 2 describes the definition of power sharing and the types of power sharing.
Section 3 describes the hierarchical structure of multiple microgrid systems and describes the functions and roles of MG-EMS and MoMC, which are responsible for the operation of the system.
Section 4 describes the algorithm for distributed optimal operation for the grid connected operation of multiple microgrids, and
Section 5 shows the simulation results for the proposed algorithm. Finally,
Section 6 describes the conclusion and the possibility that this algorithm can be applied in practice.
2. Definition of Power Sharing
Before an algorithm for optimal operation in multiple microgrid conditions is proposed, power sharing or power exchange, which are key parts of the algorithm, are defined and the need for power sharing and the kind of power sharing is also defined. It is possible to consider various situations that can occur when operating multiple microgrids by understanding the form of power sharing according to situations where power sharing is required.
2.1. Definition and Necessity of Power Sharing
Power sharing or power exchange is implemented to achieve economic or reliability objectives. This means sending power from one microgrid to another or to multiple microgrids. Conversely, it is possible to send power from multiple microgrids to one microgrid. In an AC system that constitutes a current power system, it is impossible to directly send power from one place to another, but it can be considered that power sharing is achieved by indirectly changing the flow of power. The form of power sharing can vary depending on how the topology for a single microgrid or multiple microgrid system is configured. Also, as mentioned earlier, the form of power sharing may vary depending on the number of feeders in the system.
There are two main cases that require power sharing. Multiple microgrid systems are operated in connection with the utility grid, and the system is disconnected from the utility grid and islanded operation is performed. When operated in connection with the utility grid, the main objective is to improve the economics of the overall system. In other words, the overall cost should be minimized considering the operating cost of each microgrid. The cost for peak power can be reduced through power sharing between the microgrids when peak power is expected in some microgrids. In addition, economic efficiency can be improved through coordination between a generator with a high incremental cost and a generator with a low one. On the other hand, during islanded operation, the main purpose is to improve the reliability of the entire system. For this purpose, the reliability of the overall system is improved by carrying out power sharing from the microgrid, which can share sufficient reserve power, to the microgrid with the deficiency. For this reason, power sharing is required for multiple microgrid operations.
2.2. Types of Power Sharing
The power sharing scheme can be classified into four cases according to the conditions. The first condition is the number of grid feeders connected with the microgrid and the second condition is the form of power sharing. The power sharing method can be divided into a single feeder and multiple feeders depending on the number of feeders, and can be divided into direct power sharing or indirect power sharing depending on the form of power sharing. In the case of a single feeder, it means that there is only one point which is connected with the utility grid in the microgrid or multiple microgrid systems, and in the case of multiple feeders, there are several such points. On the other hand, indirect power sharing in the form of power sharing is a common form, and this indirect power sharing implies the power flow that changes as some power sources reduce generation and other sources increase generation. In the case of direct power sharing, this means that power is directly shared as a form of point-to-point (PTP) between microgrids. For example, a back-to-back (BTB) structure is constructed between two AC systems using a power electronics facility such as a converter, and the facility can be used to share the power directly. In a single feeder, power sharing can occur indirectly because there is only one feeder, whereas in many feeders, if there is no physical connection through the transmission lines between the microgrids constituting the multiple microgrid systems, it can be regarded as indirect power sharing. If there is no connection, it can be regarded as a virtual power plant (VPP) in multiple feeders. It is defined as VPP because it determines the optimal schedule for the whole system and it is not the case that power sharing is implemented actually. If there is a physical connection, the system structure must be able to change so that the connection line does not form the entire ring system.
Figure 1 shows an example of the form of power sharing in an MMG system with two feeders. In this way, the system structures for the multiple feeders are also taken into consideration.
Table 1 shows the result of classifying the power sharing method according to the economy or reliability of the power sharing purpose mentioned above. It shows whether the form of power sharing is indirect or direct, depending on the number of feeders and the purpose of the power sharing.
5. Numerical Results
In this section, algorithm verification is performed on multiple microgrids. The multiple microgrid system can be assumed to have a system structure with a PCC as shown in
Figure 4a, or a system structure with multiple feeders as shown in
Figure 4b. In the case of multiple feeder systems like
Figure 4b, there must be a separate line for power sharing. In this case, the connections between the microgrids must be electrically isolated through the power electronics in order to prevent the problem of system stability, such as protection cooperation according to the ring topology. The number of the microgrid set is three, to verify the basic performance of the algorithm. As mentioned earlier, each microgrid has only renewable energy sources and battery energy storage systems because the microgrid that does have the units without the cost function is focused. For simplicity of analysis, each microgrid was assumed to have one photovoltaic (PV) generation and one battery energy storage system (BESS). The PV curve of each microgrid is shown in
Figure 5. The system price parameter is based on PJM market data [
21], and
Figure 6 shows the price curve. The load curves are shown in
Figure 7 and the load capacities are summarized in
Table 4. The parameters such as the rated output power and the rated capacity of the power sources are set appropriately for the loads and are listed in
Table 4 together with the other parameter values. All simulations are done with 1-h time step size and all parameters set above can be changed according to the system configuration. The simulation was also performed using a computer with an Intel Core i7-6800K 3.4GHz CPU and 32GB memory and MATLAB (2016a, Mathworks, Natick, MA, USA). Bonmin was used as an optimization solver and the settings for the solver are summarized in
Table 5.
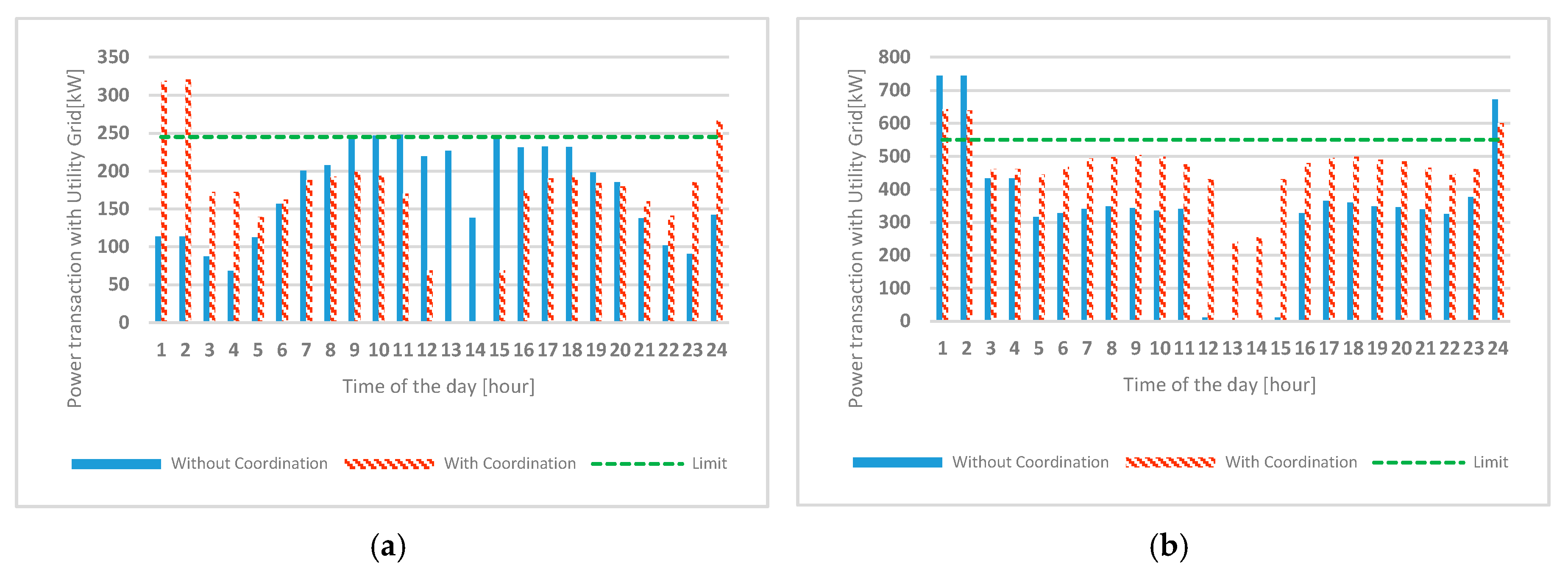
Figure 8 shows the daily schedule results of the power supplied from the utility grid for each microgrid. The solid bars are the results before the coordination are applied, the shaded bars show the results of the coordination applied, and the dotted line is the predetermined limit value for each microgrid. In the figure of the schedule without the coordination, in the case of MG1, the schedule is configured to be smaller than the limit value at all times, and only the amount of the power transaction with utility grid at 1:00, 2:00, and 24:00 are exceeded the limits in MG2, and the limit was exceeded in most of the times except for 12:00 to 15:00 in MG3. This result shows that MG1 has some margin in all times until the limit is exceeded and MG2 has a margin in most time periods, including peak time, and MG3 needs the power sharing from other MGs in the majority of the times. In other words, since MG3 pays a penalty for exceeding the limit, it has a cost loss. The expected losses are resolved somewhat through power sharing between the microgrids, as shown in
Figure 8 (shaded bars). Since each microgrid determines the schedule in consideration of the price curve of the utility system, the result of the coordination in MoMC can be interpreted as follows. (1) Net-demand is small in most of the time including peak time, so that MG2, which has enough margin from the limit, changes the schedule and shares some or all of the power supplied from 3:00 to 23:00 to other MGs as power sharing; (2) in the case of MG1, it is supplied from the grid at the lowest price of 24:00, 1:00, and 2:00, and is shared with other MGs; (3) in case of MG3, since it exceeds the limit in most of the time, it does not pay the penalty cost at all times except 24:00, 1:00, and 2:00 through power shared from MG1 and MG2.
Figure 9 shows the state of power sharing by time for each microgrid. Each microgrid constructs a schedule according to its own limit line and calculates a value for power sharing by varying its schedule according to coordination from the MoMC, and performs power sharing according to these values. When the schedule is changed through coordination, the schedule of the ESSs belonging to each microgrid also changes.
Figure 10 and
Figure 11 show the change of SOC and the output of each ESS.
The change in the schedule of each microgrid through this coordination is due to the change of the net-demand shown in
Figure 12. The MoMC calculates the amount of the power sharing and reflects these values to the net-demand of each MG; it delivers the coordinated net-demand to each MG-EMS, and then the MG-EMS uses the coordinated net-demand to change its own schedule. Therefore, the amount of the power sharing shown in
Figure 9 reflects the change of the power schedule supplied from the utility grid and the change of the ESS schedule.
Table 6 shows the cost for each microgrid and the total MMG according to the conditions. The cost results before and after the coordination are applied, and the cost results of the centralized method considering all the microgrids are compared. This table shows two things. First, the results before and after the coordination is applied are different for each microgrid. In the case of MG1 and MG2, the cost was reduced due to coordination and the cost for MG2 increased. However, the cost of the entire MMG is reduced by about 1.34% when the coordination is applied. In other words, the cost of some microgrids will increase, but other microgrids will benefit, which will benefit the entire MMG system. Secondly, the difference between the cost of the coordinated MMG and the cost of the centralized method is only about 0.3%. That is, even if an optimal schedule is constructed in a distributed form, it is close to the result of the centralized method and achieves a near optimum.
Table 7 shows the results of applying the same algorithm, except for the penalty term, in the objective function defined in the previous section. Since the penalty was not applied here, the MMG cost after coordination was about 0.16% higher. The proposed algorithm stops the iteration when the difference of total cost in the iteration is within a convergence criterion. Since it is set to 0.01, the error can be canceled if it is set to a smaller value. As in
Table 5, the difference from the centralized method is about 0.3% in
Table 6, which can be regarded as having an approximate optimal value.
Figure 13 shows the computation time as the number of microgrids increases. As a result, the conventional central optimization method increases the computation time dramatically as the number of microgrids increases. On the other hand, in the case of the proposed algorithm, the computation time does not increase significantly even if the number of microgrids increases. When the proposed algorithm is applied, it can be achieved within a few minutes because it is computed in parallel and in a distributed manner. As a result of the analysis under the same solver, the computation time was about 66 s for the seven microgrids, whereas the conventional centralized method took about 21 h. Even if considering the actual data communication time, the required time is within a few minutes. Therefore, the proposed algorithm is more effective because it does not increase the burden of computation even if the number of microgrids increases in multiple microgrid systems.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}