1. Introduction
Due to the increasing energy demand and environmental issues, the number of wind farms is rapidly increasing in many countries [
1,
2,
3]. At present, the most commonly employed wind turbine in the field of wind power generation are doubly-fed induction generator (DFIG) and direct-drive permanent-magnet synchronous generator (PMSG). Most of the newly constructed wind farms also employ more and more DFIG and PMSG, no longer adopting fixed-speed induction generators (FSIG). However, before the emergence of variable-speed wind turbine generators technology, FSIG were already widely used, and these FSIG-based wind farms are still in operation at present. Therefore, FSIG-based wind farms still have a certain percentage in the existing large-scale wind farms [
3,
4,
5,
6,
7].
To implement the large-scale integration of wind energy supplies, series compensation in existing line, and building of new AC line and high-voltage direct current (HVDC) lines with line-commutated converter (LCC) are currently being considered. However, series compensation may potentially induce subsynchronous resonance (SSR) which can cause shaft failures [
8]. SSR is an electromechanical oscillation caused by the coupling between generator and transmission system with series compensation capacitor [
9]. Researches on SSR in FSIG-based wind farms, which is caused by series compensation, have been reported in the literatures. Reference [
10] was the first paper to analyze the possibility of SSR in FSIG-based wind farms. The further analyses of SSR in single-cage and double-cage (FSIG) wind farms were presented in [
6,
11], respectively. It is shown in [
6,
10,
11] that the SSR may happen in FSIG-based wind farms even at real levels of series compensation. In [
12], the flexible AC transmissions system (FACTS) controllers, static var compensator (SVC) and thyristor controller series compensator (TCSC) were proposed to damp SSR in FSIG-based wind farms.
For the long-distance transmission of energy power, LCC-HVDC is a preferred option because of its high power control capability and fast modulation ability [
13]. In China, three LCC-HVDC projects have been put in operation, and three projects are under construction, aiming to transmit wind power from west and north of China to east and south of China. A few LCC-HVDC projects in the United States are also planned to transmit wind power [
7].
However, the applications of LCC-HVDC also bring new problems to the stability of power systems. Past experiences and studies have shown that fast response controller of LCC-HVDC may lead to subsynchronous torsional interaction (SSTI) in nearby steam turbine-generator (TG) [
14,
15]. SSTI is an electromechanical interaction between the TG shaft and the power electronic equipment (HVDC and FACTS) within the subsynchronous frequency range [
1]. This problem may produce increased oscillations in the torsional modes of TG shaft. If proper commeasures are not considered, it can cause cumulative fatigue damage, which shortens the service lifespan of the TG shaft [
16].
In 1977, the undesirable interaction between LCC-HVDC and the shaft of nearby steam TG was observed during the field tests on the Square Butte HVDC project [
17]. It was the first SSTI event in engineering between LCC-HVDC and an electrical-closed steam TG. Since then, many technical papers have studied the cause and suppression measures for this oscillation. The research results showed that the fast-response constant current controller of the LCC-HVDC rectifier side may produce negative damping on near steam TG under certain conditions. When the damping of the whole system is negative, the natural torsional mode of the shaft can be excited, which leads to exponentially growing oscillation in the mechanical and electrical systems [
1,
18]. The subsynchronous damping controller (SSDC) was proposed by [
8], and was widely used in practical engineering to provide positive damping over subsynchronous frequencies range [
19,
20].
In general, the shaft system of wind TG consists of hub and blades, shaft, gearbox, etc. [
1]. Similar to that of steam TG, the shaft of wind TG also exhibits modes of mechanical oscillation, and its natural torsional frequencies usually lie within subsynchronous frequency range. When the wind TG is connected in the close vicinity of the LCC-HVDC system, LCC-HVDC may cause negative damping and excite the oscillation of shaft of wind TG under some operational conditions. Then this oscillation will lead to the SSTI between LCC-HVDC and wind TG, which threatens the safe operation of wind farms.
The SSTI between DFIG wind farms and LCC-HVDC was analyzed by small-signal methods and electromagnetic transient (EMT) simulations in [
3]. However, this method has to refer all nonlinear equations and eliminate some differential equations to describe the entire system. What is more, when the system structure undergoes changes, resulting in changes in the state variables, the small-signal model of the system must be reestablished thoroughly. The SSTI behavior between FSIG-based wind farms and LCC-HVDC was first analyzed through EMT simulations in [
18], but the mechanism was not analyzed. The SSTI behavior of FSIG farms that connected to LCC-HVDC and series compensated line simultaneously was analyzed in [
7]. However, the wind turbine generator’s (WTG) drive train adopts the two-mass model, the subsynchronous oscillation mode may not be observed. Moreover, little information was reported in the literature on a systematic analysis of SSTI in FSIG-based wind farms connected only to LCC-HVDC.
In China, most of power energy generated from FSIG-based wind farms is transmitted by LCC-HVDC. From the above analysis, there is a possibility of SSTI between LCC-HVDC and shaft of these FSIG-based wind farms under some certain conditions. This raises a question: whether this SSTI will cause the unstable operation of wind farms and LCC-HVDC, and what is the characteristic of this type of SSTI? The operators of FSIG-based wind farms and power grid are very concerned about this phenomenon. However, the current research on this aspect is very limited and cannot provide enough information. Aiming at this engineering issue, this paper focuses on SSTI between LCC-HVDC and FSIG-based wind farms. The characteristic of this type of SSTI is investigated in detail, by the methods of small-signal analysis and EMT simulations.
The contributions of this work are shown as below: (1) a typical three-mass model of FSIG-based wind farms connected to LCC-HVDC lines is built. (2) To simplify calculations, a modular modeling method is proposed for building the small-signal mathematical model of the investigated system. When the system structure undergoes changes, resulting in changes in the state variables, the small-signal model only needs to be changed slightly. (3) The characteristics of SSTI in FSIG connected to LCC-HVDC are explored. (4) The impact of dominant factors analysis is conducted, including mechanical parameters, wind farm capacity, controller parameters, and the distance between the rectifier side of LCC-HVDC and wind farms. The results of this paper build the foundation to improve the stability level of FSIG-based wind farms connected to LCC-HVDC.
The remainder of this paper is structured as below. In
Section 2, the modeling of the whole system is established. Small-signal analysis and participation factor analysis are utilized to characterize SSTI in
Section 3.
Section 4 describes the impact of dominant factors analysis for the investigated system. The results of the small-signal analysis are validated by the simulations in
Section 5.
Section 6 discusses the risks of potentially unstable SSTI phenomenon for systems with wind farms-based FSIG wind turbines connected to LCC-HVDC lines.
Section 7 summarizes the paper.
2. System Modeling
The investigated system, given in
Figure 1, comprises FSIG-based wind farm with 500 WTGs, an equivalent AC system
S1 and a LCC-HVDC lines. It is assumed that the FSIG-based wind farm is an aggregation by many 750 kW single-cage squirrel cage IGs. The wind speed is assumed to be 12 m/s. The rated voltage of each induction generator is 0.69 kV. This assumption adopts the weighted admittance averaging method supported by several recent studies [
6,
21,
22,
23]. Those studies indicate that this simplification is able to offer a reasonable equivalent model for SSTI stability research. The parameters of the IG given in
Appendix A,
Table A1, are provided by actual wind farms in Northwest China.
The AC system is modeled as an equivalent voltage source
S1 and a series impedance
RS + jXS. The LCC-HVDC transmission line is derived from the CIGRE (International Council on Large Electric systems) HVDC benchmark model [
24]. The rated LCC-HVDC transmission power is 1000 MW and the transmission voltage level is 500 kV. Other parameters are given in
Appendix A,
Table A2 and
Table A3. The system with those parameters is hereafter named the Base case in this paper.
The system consists of four parts: (i) the shaft system, (ii) the induction generator (IG), (iii) the LCC-HVDC transmission line, (iv) the AC network. The mathematical modeling of each part is shown as follows.
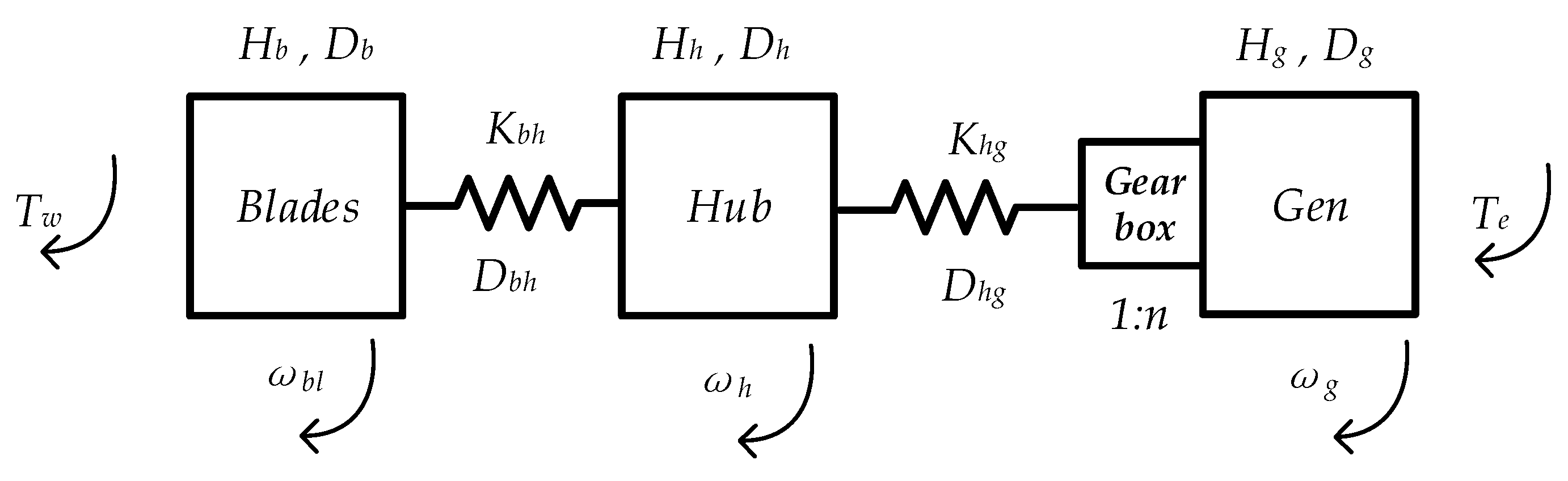
2.1. Modeling of the Shaft System
Generally speaking, the shaft system of a wind turbine generator consists of hub and blades, low-speed shaft, gearbox, high-speed shaft and generator rotor [
18]. In this paper, it is represented as a three-masses spring system in
Figure 2 [
12]. The first two masses represent the blades and the hub, respectively; the third mass represents the gearbox and the generator.
The dynamic equations of this mass-spring system can be expressed as:
where:
Tw: wind turbine torque;
Te: generator torque;
Hb, Hh, Hg: inertia of blades, hub and generator, respectively;
Db, Dh, Dg: self-damping of blades, hub and generator respectively;
Dbh: mutual damping between blades and hub;
Dhg: mutual damping between hub and generator;
ωb: Synchronous angular frequency;
ωbl, ωh, ωg: rotational speed of blades, hub and generator respectively;
Kbh: spring constants between blades and hub;
Khg: spring constants between hub and generator.
The parameters of the mass-spring model of the turbine generator system are listed in
Table 1 [
12]. For the system here investigated, we assume zero damping coefficients for all self-damping and mutual damping. According to [
12], the torsional natural frequencies of this system calculated for the mass spring turbine generator are 0.609 Hz and 4.982 Hz.
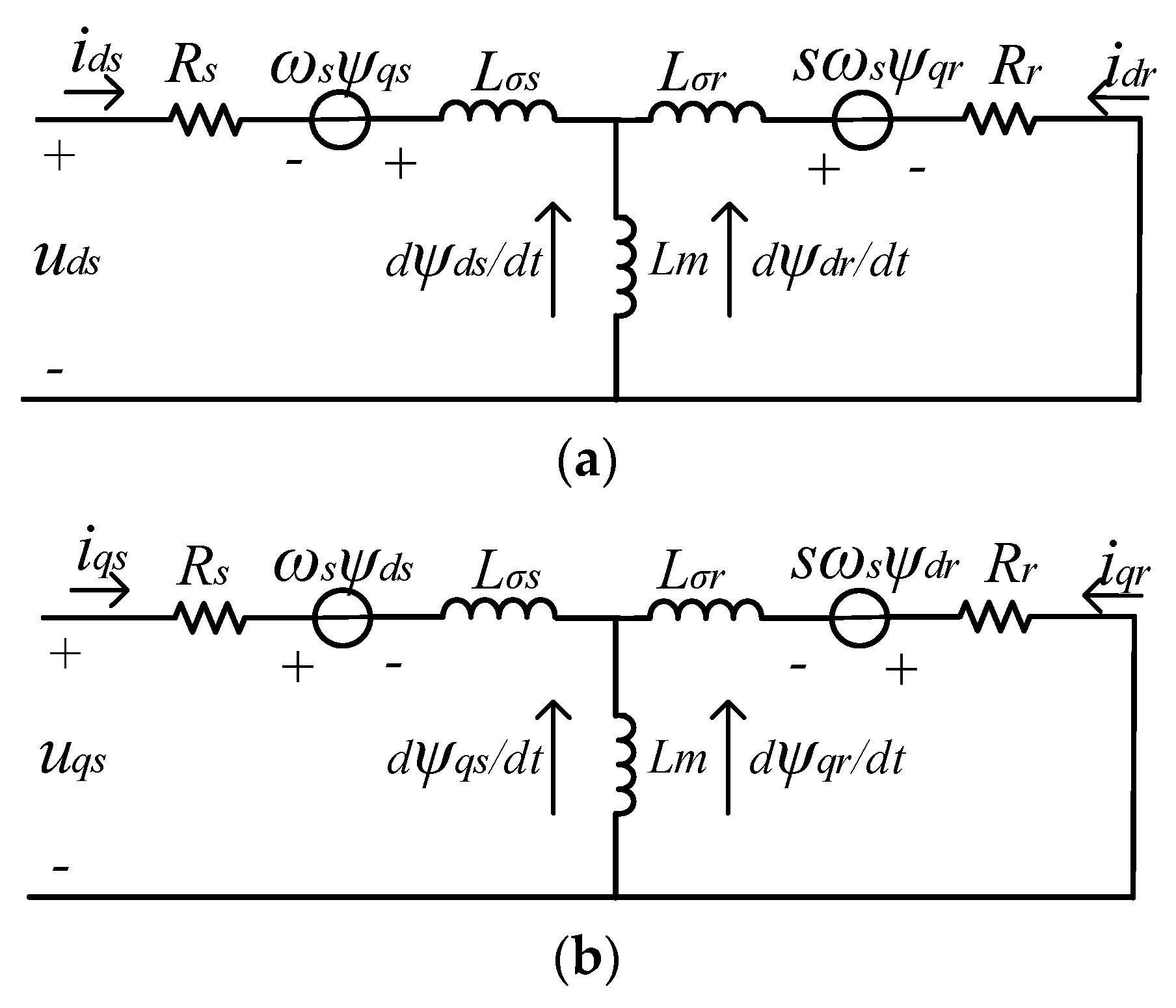
2.2. Modeling of the Induction Generator
Figure 3 shows the equivalent circuit of a squirrel cage IG with a shunt capacitor. Shunt capacitor
CF is employed to provide the reactive power consumption for the FSIG-based wind turbine, as they do not include an internal excitation system. A detailed mathematical model of a single-cage IG in a d-q reference frame is given by Equation (3).
The electromagnetic torque is expressed as:
where:
Rs, Rr: Resistance of stator and rotor, respectively;
Xm: Excitation reactance;
Xsσ, Xrσ: Leakage inductance of stator and rotor, respectively;
Te: Electromagnetic torque.
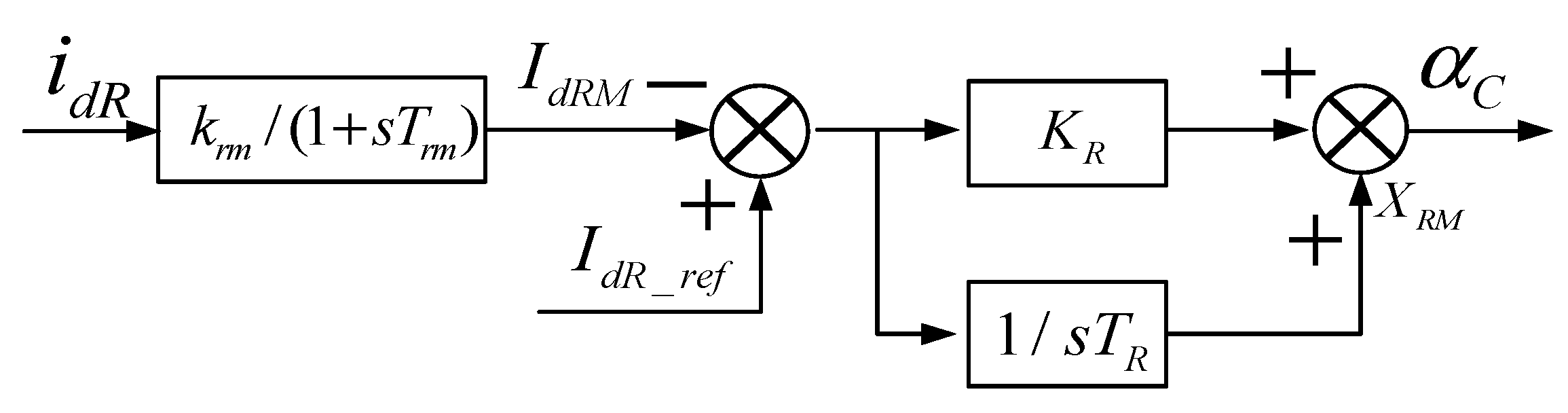
2.3. Modeling of the LCC-HVDC Lines
The LCC-HVDC system is adopted from the CIGRE HVDC model.
Figure 1 shows its typical configuration. Constant direct current and constant extinction angle control are employed on rectifier and inverter side, respectively.
The differential equations of the DC transmission line are written in Equation (6).
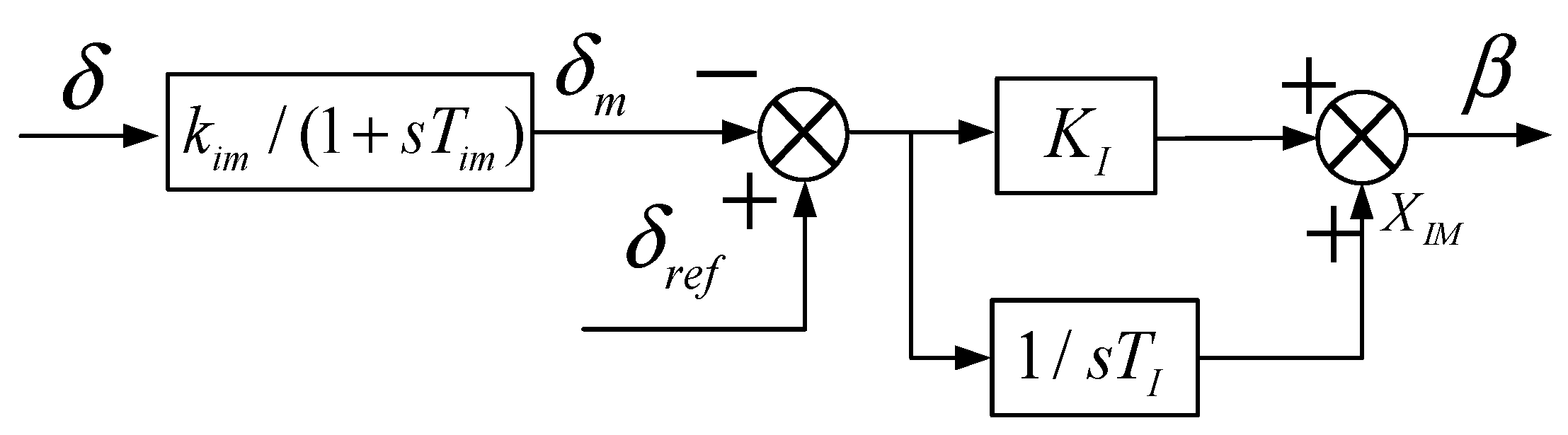
The block diagrams of rectifier and inverter control are given in
Figure 4 and
Figure 5, respectively. The differential equations of both sides are listed as Equations (7) and (8), respectively.
UdR, UdI: DC bus voltages of rectifier and inverter station, respectively;
IdR, IdI: DC current injected from the rectifier and absorbed by the inverter;
Rd, Ld, Cd: DC line resistance, DC line inductance and DC-link capacitance, respectively;
UCd: DC-link capacitor voltage.
Krm, Trm: the gain and time constant of DC current measurement, respectively;
IdRM, Iref: the measured DC current of rectifier and the reference dc current, respectively;
KR, TR: the gain and time constant of proportion integration (PI) controller in rectifier current controller;
α: the reference firing angle of rectifier side;
δ: the extinction angle of inverter side.
2.4. Modeling of the AC Network
The AC network comprises the equivalent voltage source S1, the reactive compensation capacitor CF, the AC shunt filter CB, and the AC transmission line, represented by resistance and inductance.
A general mathematical description of the capacitor and the transmission line are as follows: Capacitor:
2.5. State-Space Model of the Entire System
The conventional method for small-signal analysis has to refer all nonlinear equations and eliminate some differential equations to describe the entire system. A drawback of this method is the large amount of calculation required, especially when the investigated system is complex. In order to simplify the calculation, modular modeling method is proposed to build the small-signal model of the investigated system. Taking the capacitor of the AC system as an example, the procedures for modular modeling method are as follows
Step 1. Model linearization
The nonlinear equations describing the subsystems, given in
Section 2, are expressed in the form of Equation (11)
To study the system stability after suffering a small disturbance, it is necessary to build the linear model of the subsystem around the equilibrium point [
25]. For the equilibrium point
, the Equation (11) can be written as:
where:
After subjecting to small perturbations, the initial state vector
x and the input vector
u can be expressed by:
The new state must satisfy Equation (11). Hence,
The functions Equation (11) can be expressed in the form of Taylor’s series expansion. Assuming the perturbation is small enough, the second- and higher-order powers can be neglected. The Equation (14) can be expressed as:
Since Equation (12), the linearization result is obtained.
For the capacitor of the AC system, the linear equations can be written as:
Step 2. Small-signal model of subsystems
Based on the linear subsystems model as outlined in Step 1, the linear equations can be expressed in the form of the small-signal model. The state-space of a subsystem frame is given as:
where
x is the state variable of the subsystem,
u is the input variable,
y is the output variable,
A,
B,
C and
D are all constant matrices. According to Equation (16), the
A,
B can be expressed as,
C, D are determined by the output variable y of the subsystem.
For the capacitor of the AC system, Δ
uc is the state variable and the output variable, Δ
ic is the input variable. The state-space of the capacitor of the AC system can be written as:
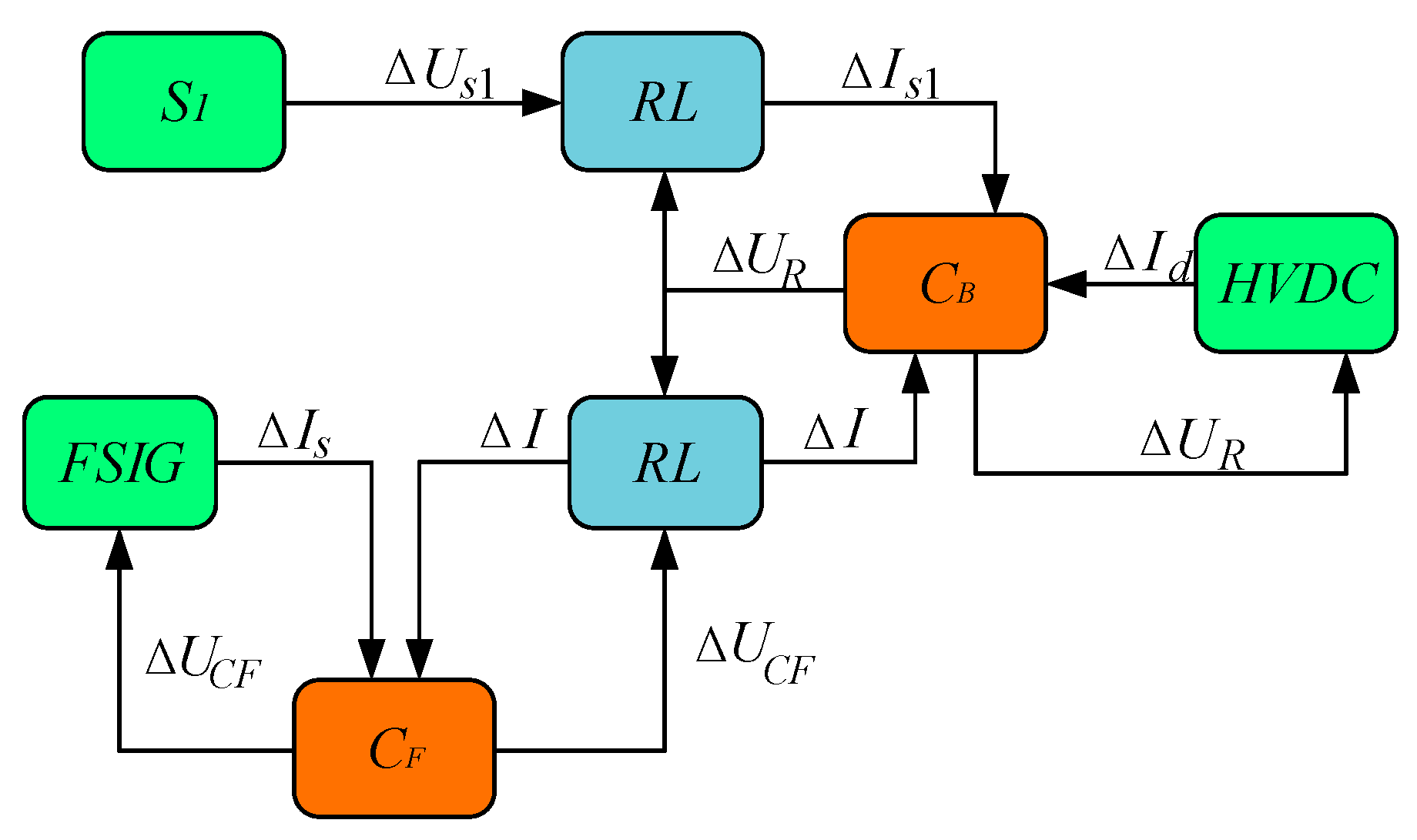
Other subsystems have similar format. After determining the inputs and outputs of each module, the state-space model of each subsystem can be obtained. The input and output variables of every module are given in
Figure 6, which is also the interface between the modules.
Step 3. Modeling of the entire system
All subsystems described above are integrated, and the small-signal model for the entire system is developed through input/output interface and MATLAB function ‘linmod’ automatically.
The modular modeling method only requires the small-signal model of subsystems. The elimination process of the differential equations is automatically performed in MATLAB. In comparison with conventional methods, the modular modeling method requires a reduced amount of calculations and is less prone to errors.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















