Coordinated Control of Wind Turbine and Energy Storage System for Reducing Wind Power Fluctuation


Abstract
:1. Introduction
2. Wind Power and ESS Models
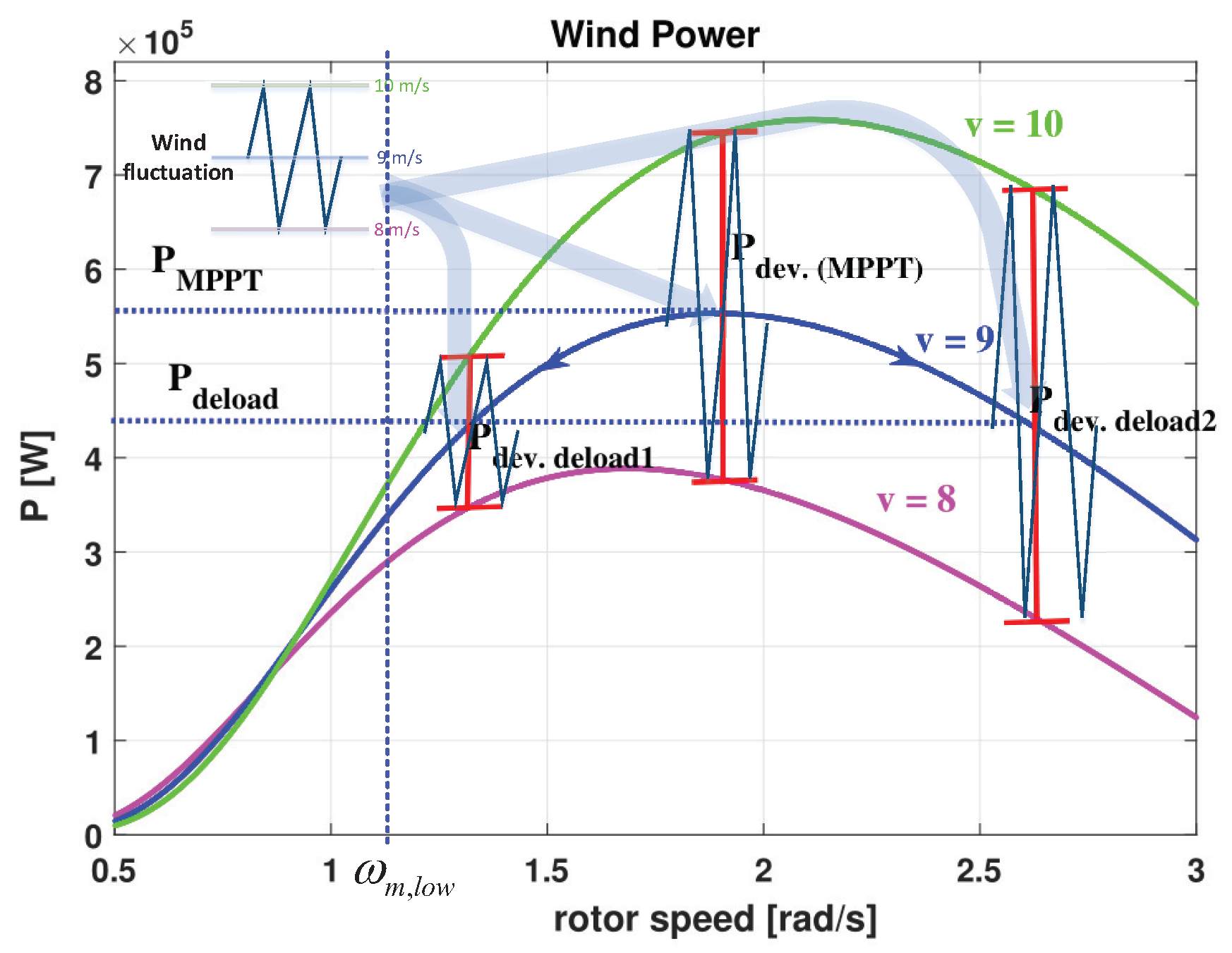
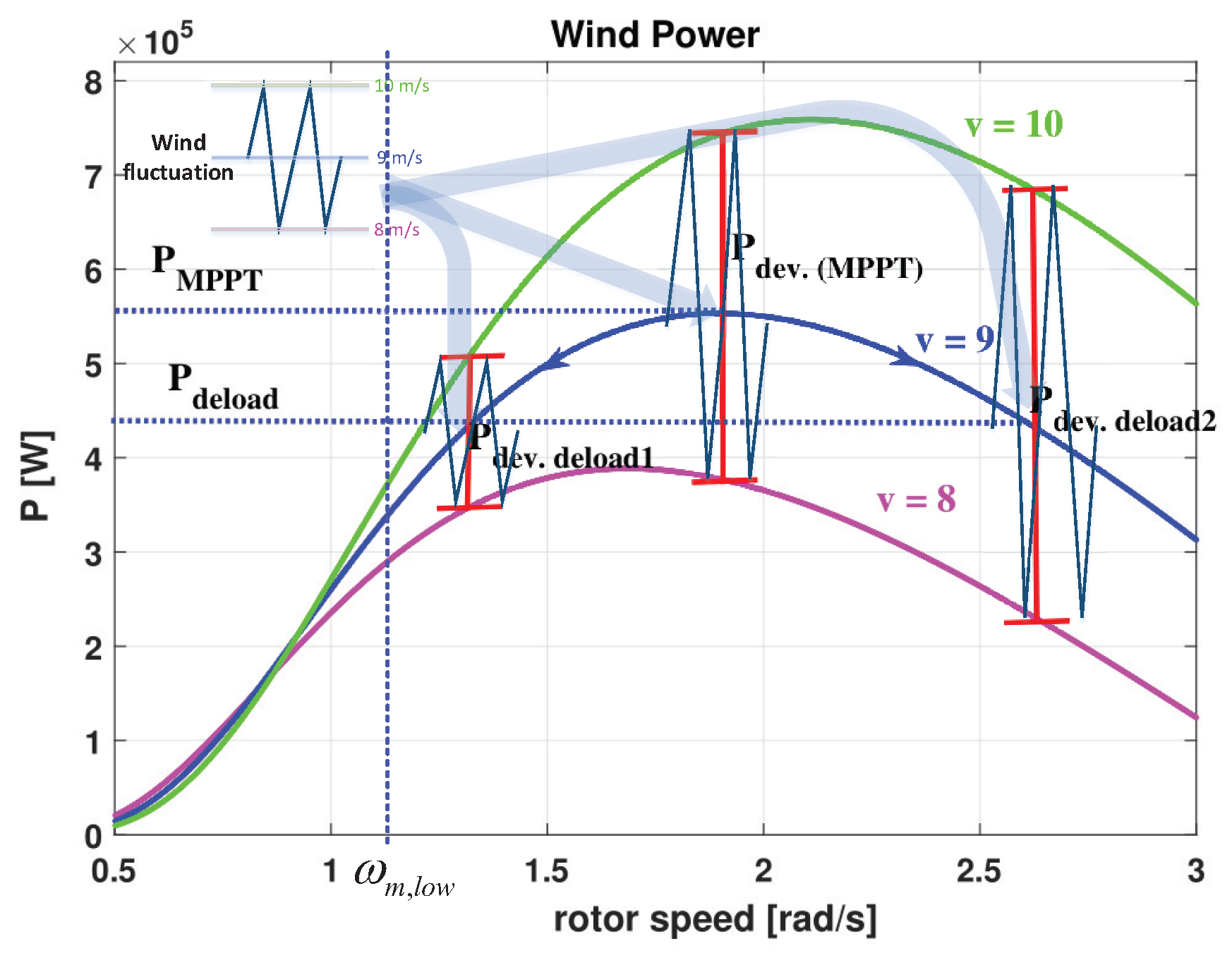
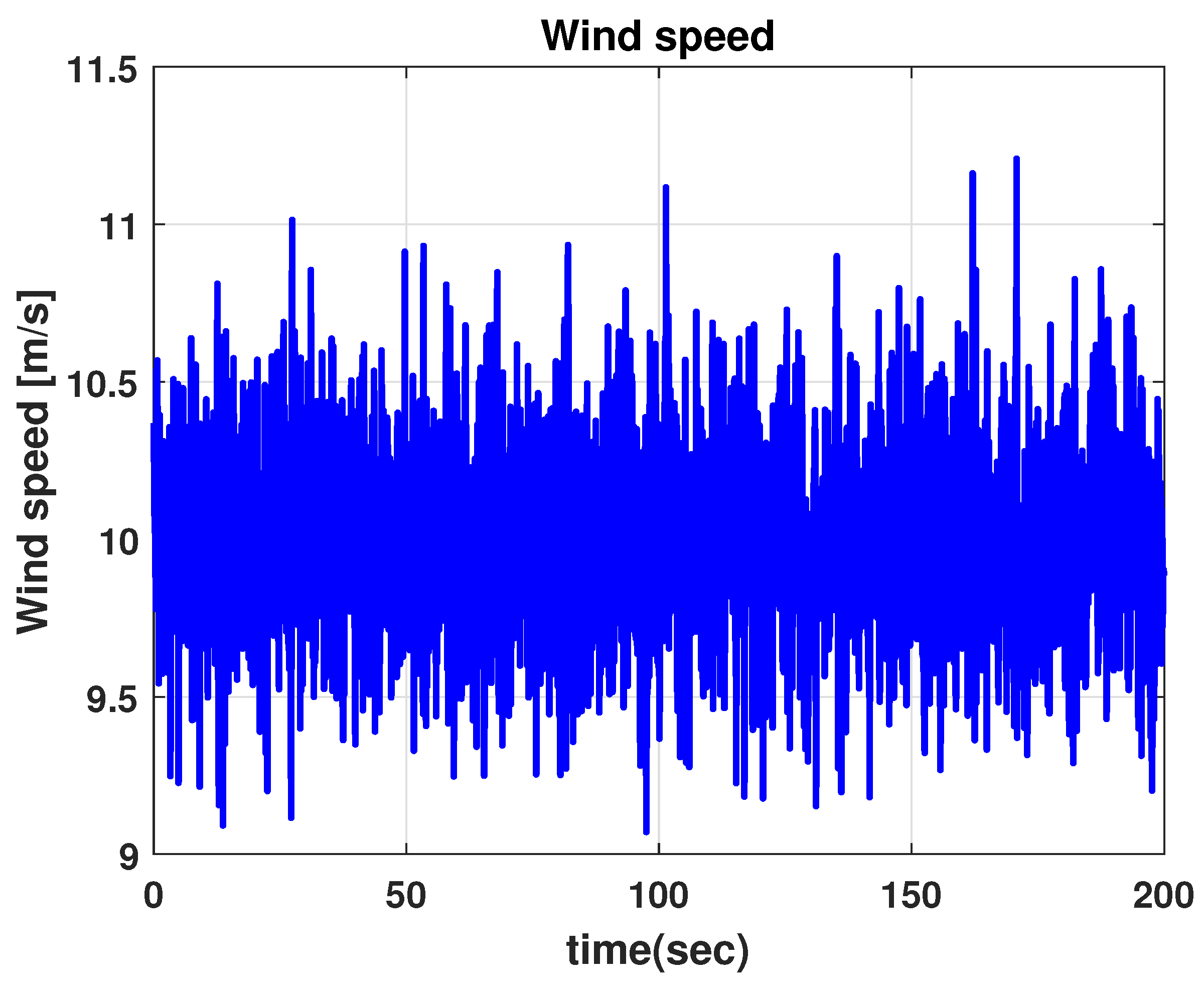
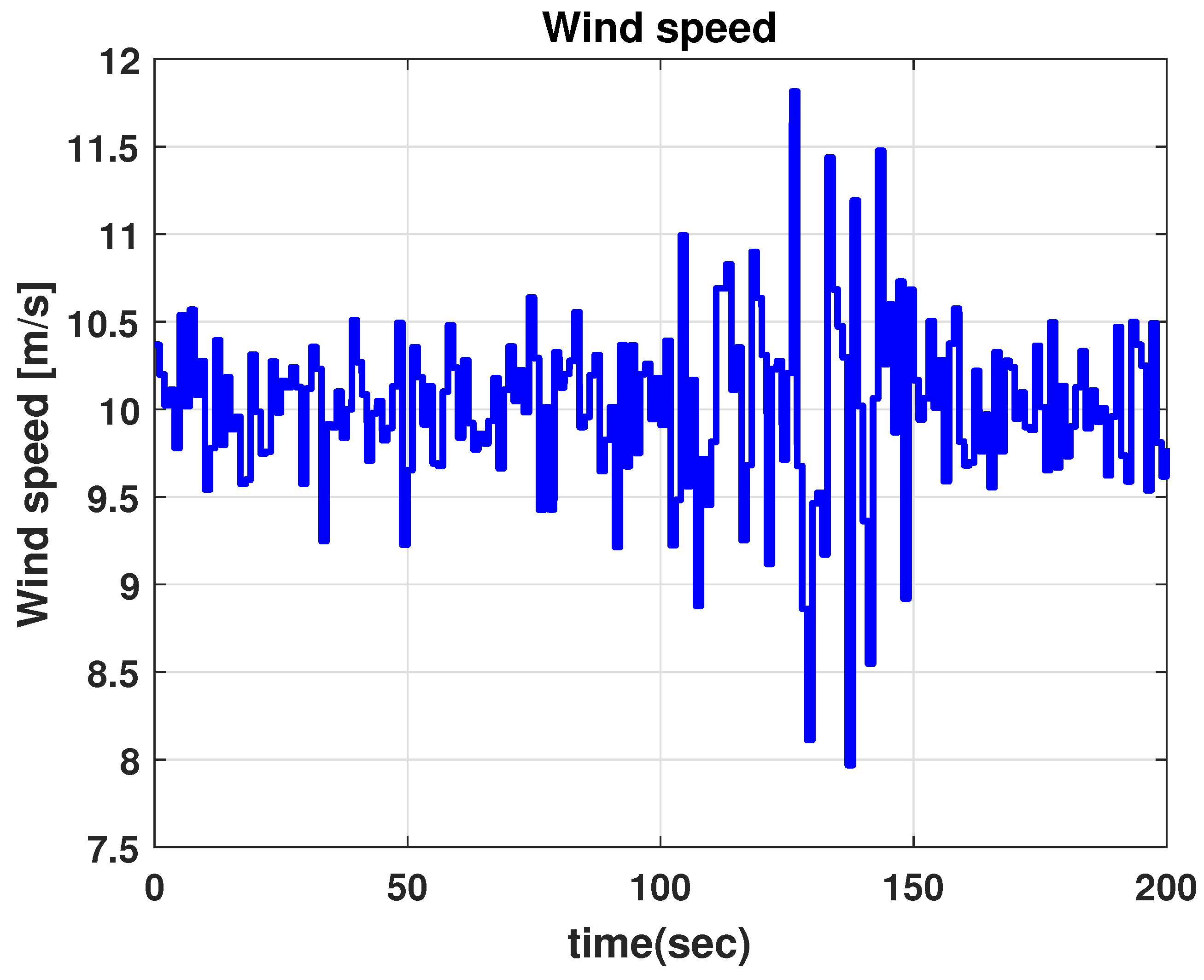
2.1. Wind Power Model
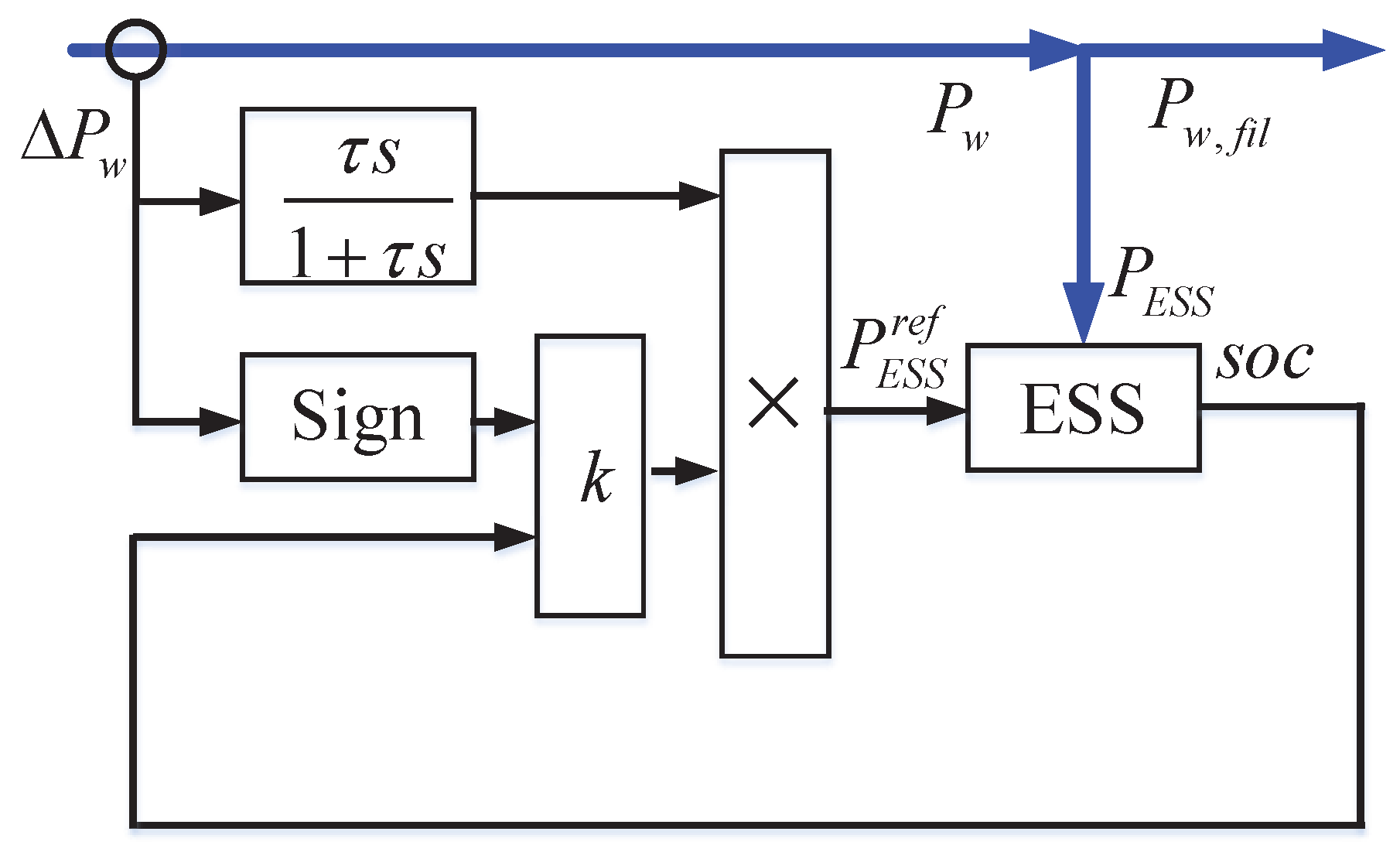
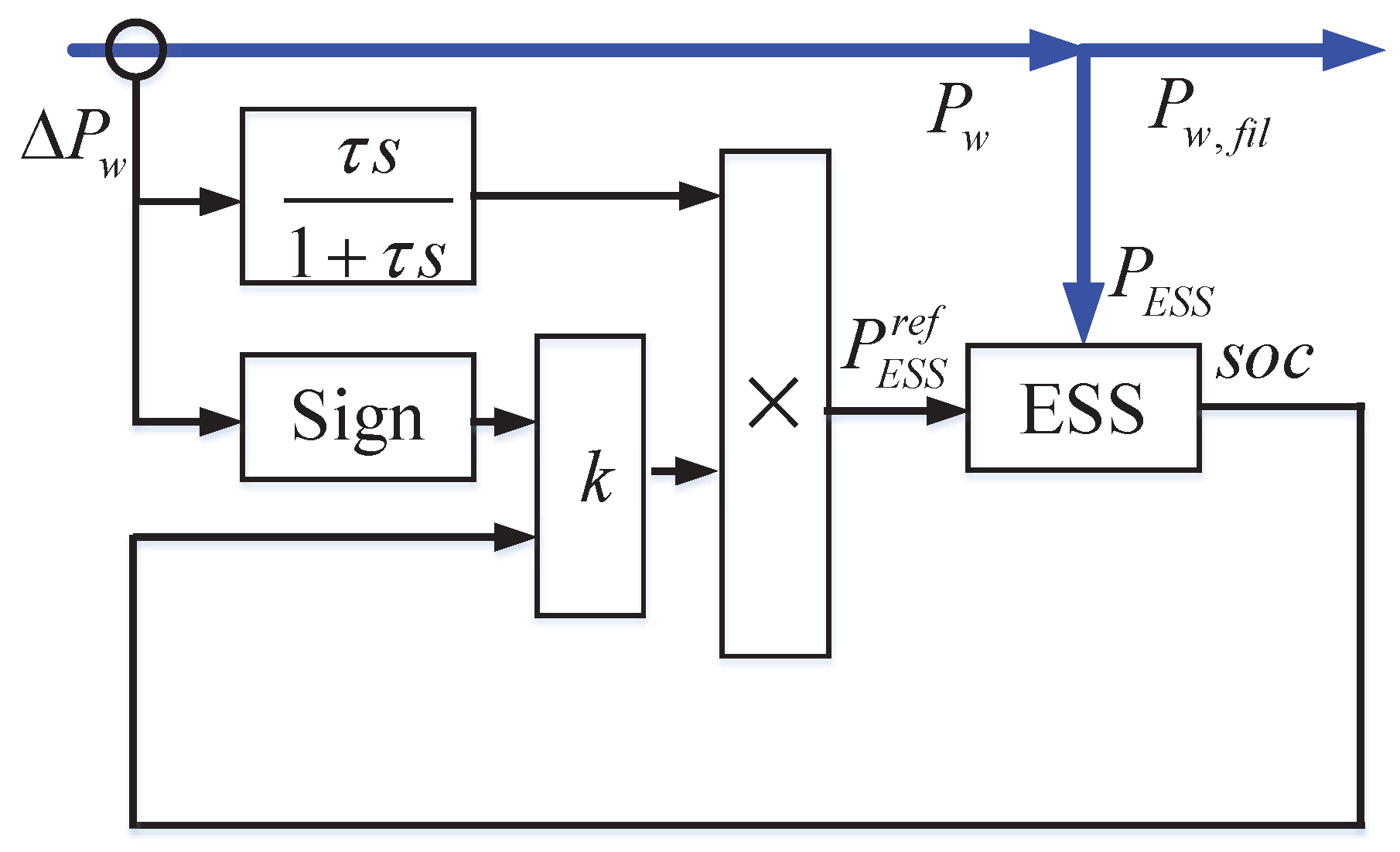
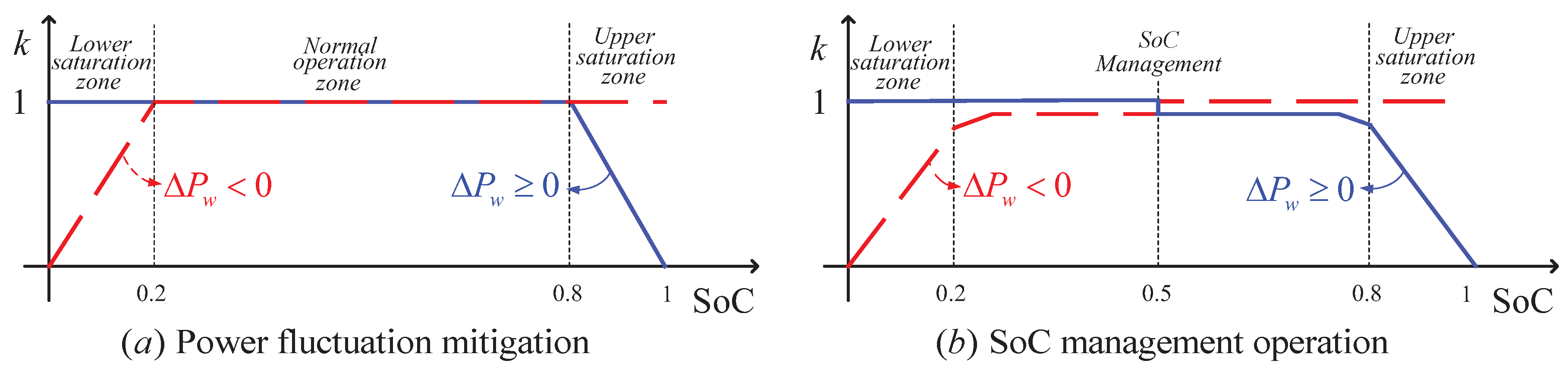
2.2. ESS Power Model
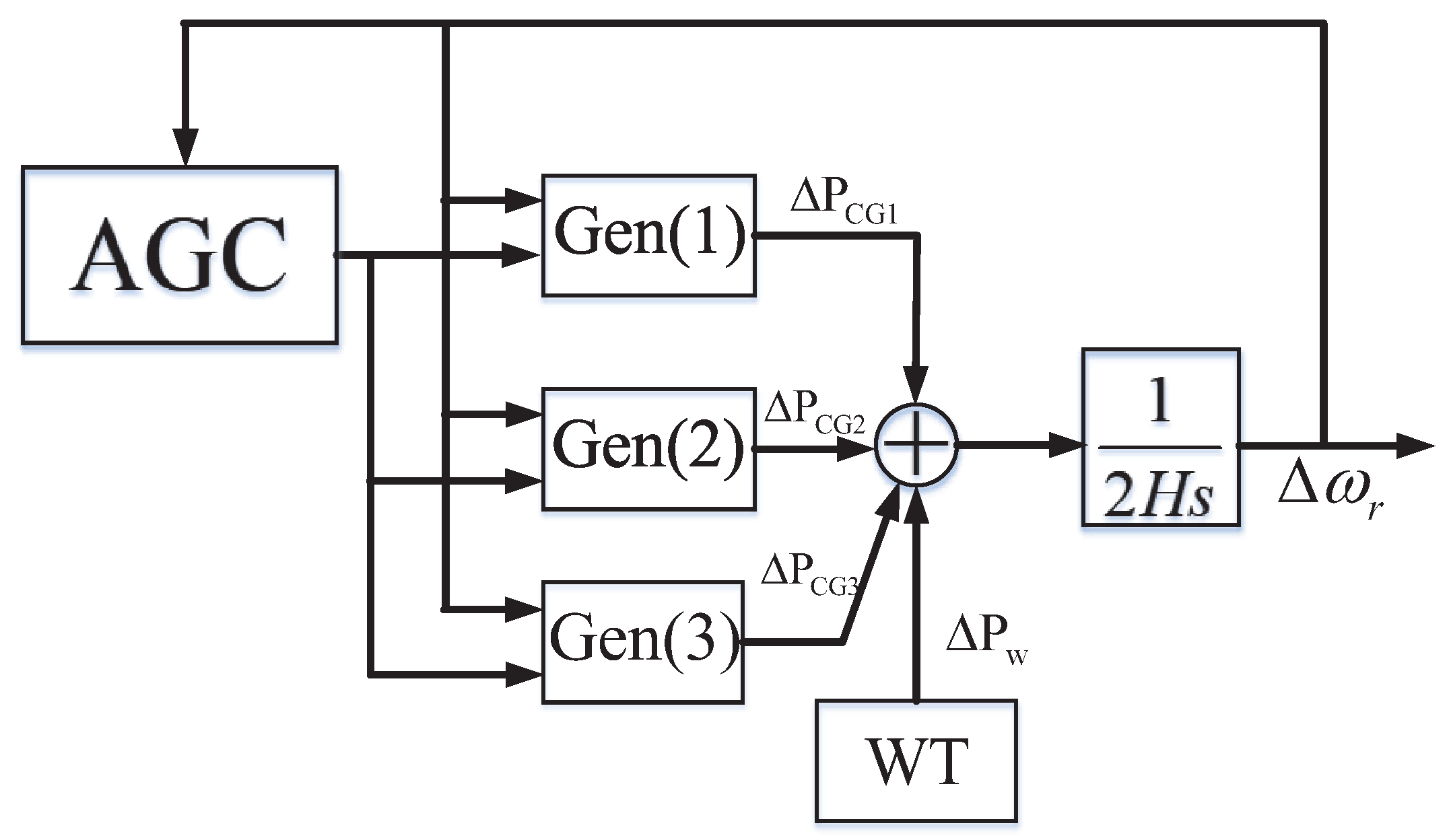
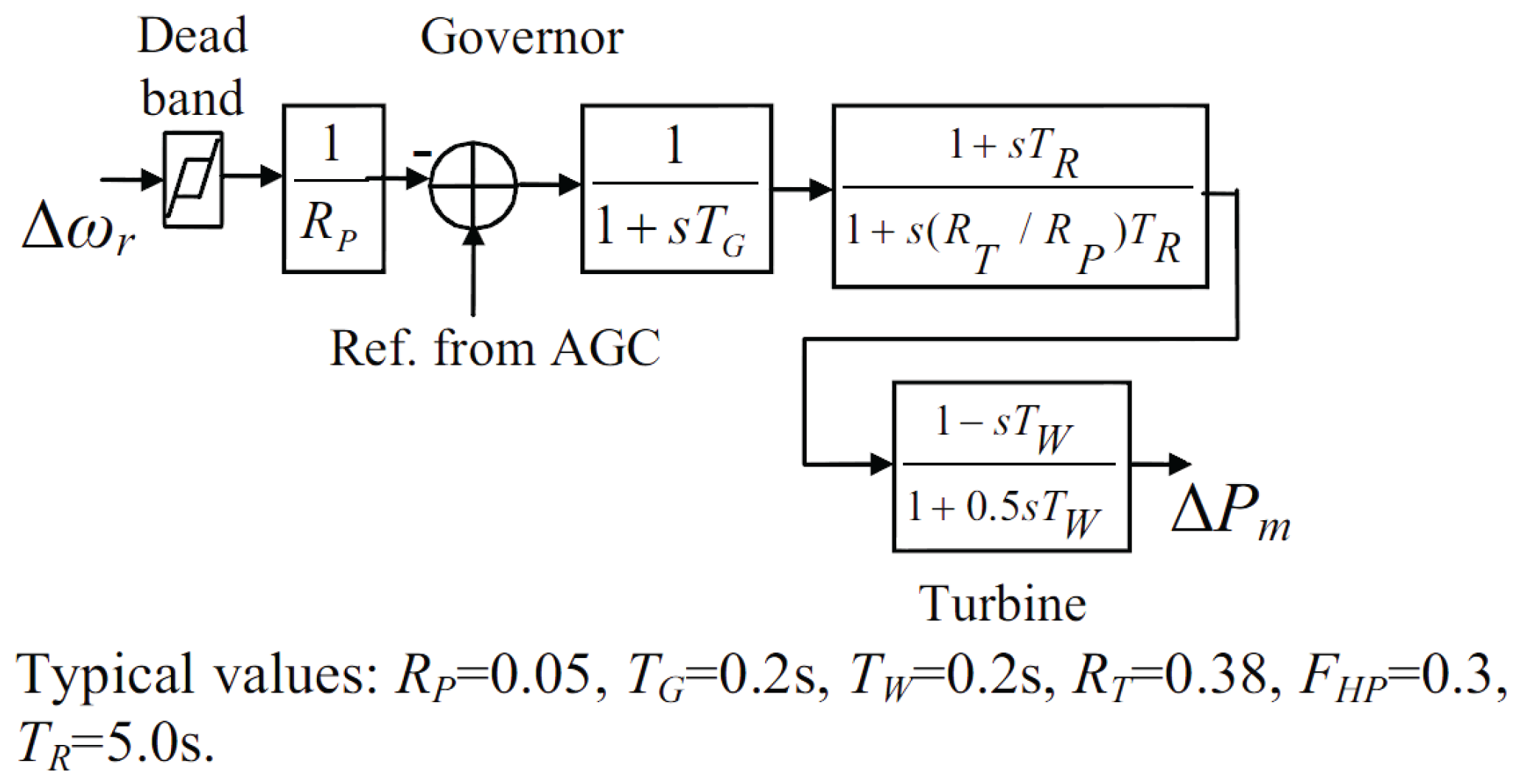
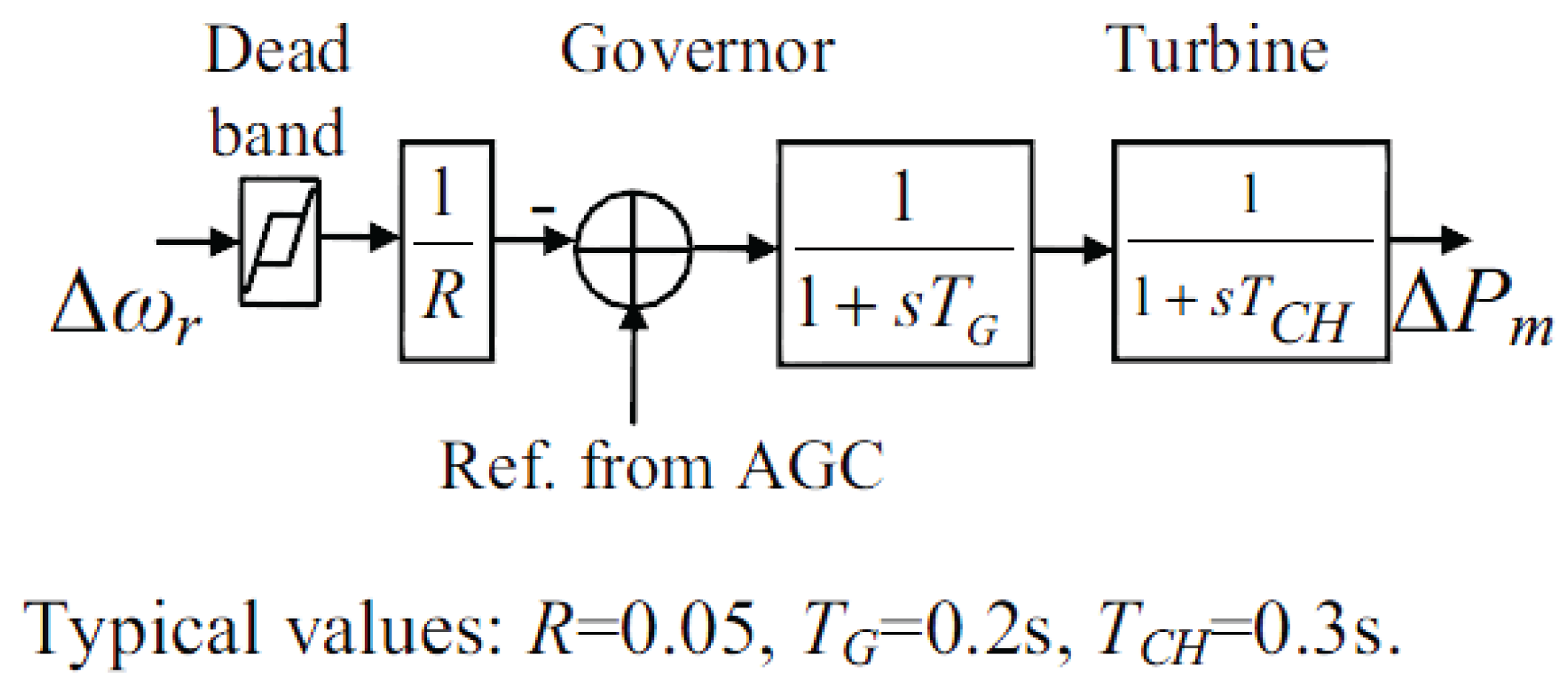
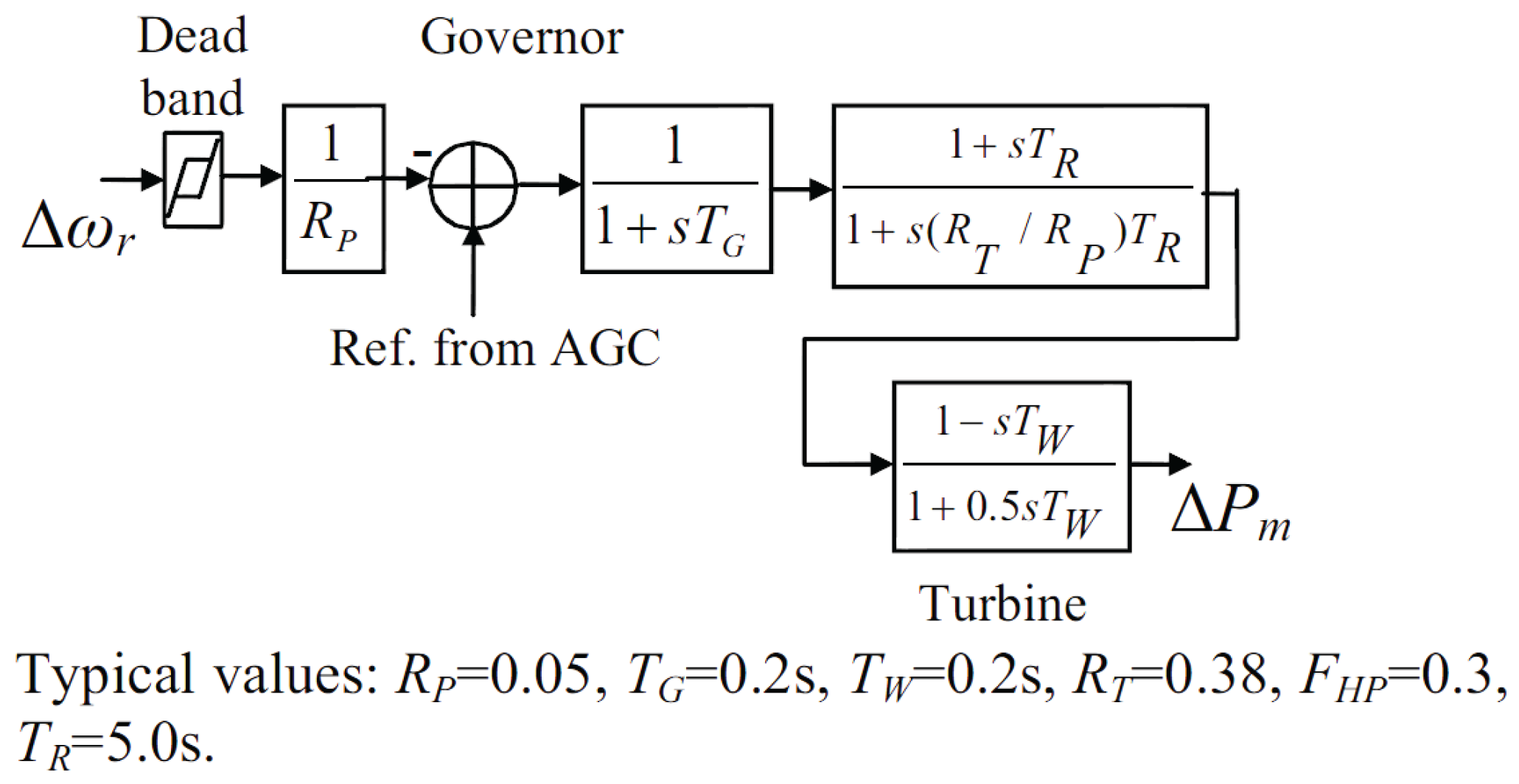
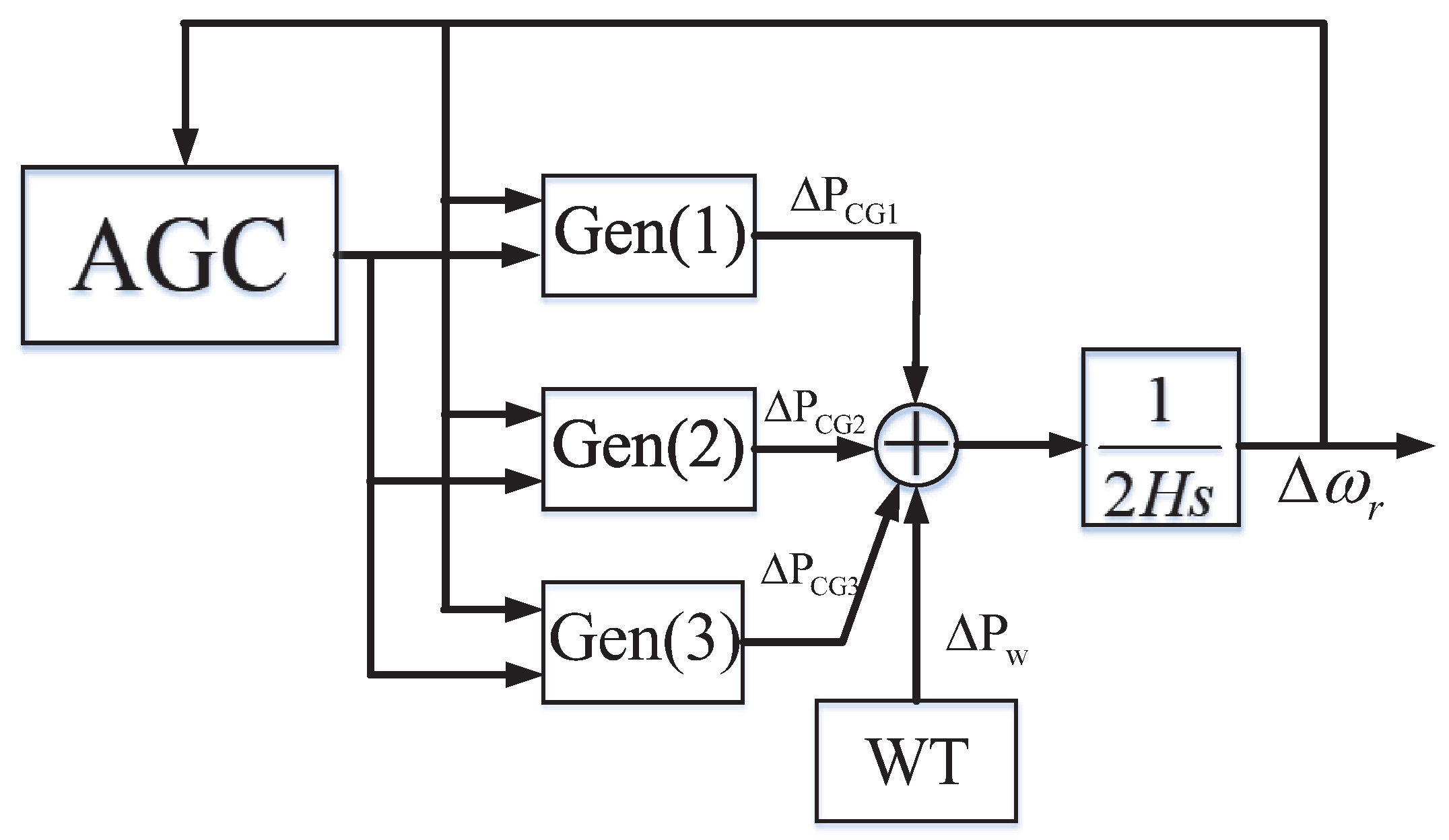
2.3. Power System Model
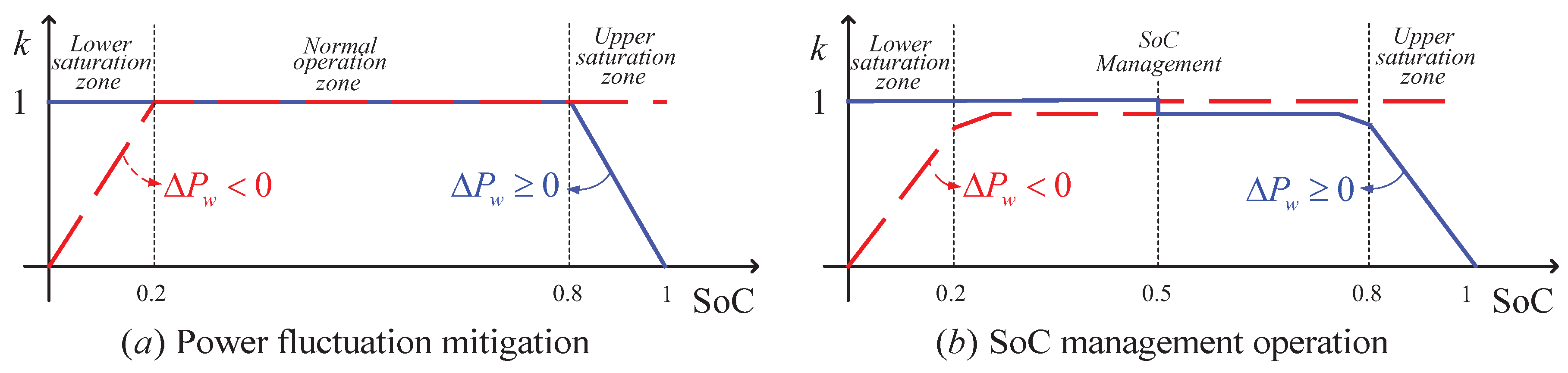
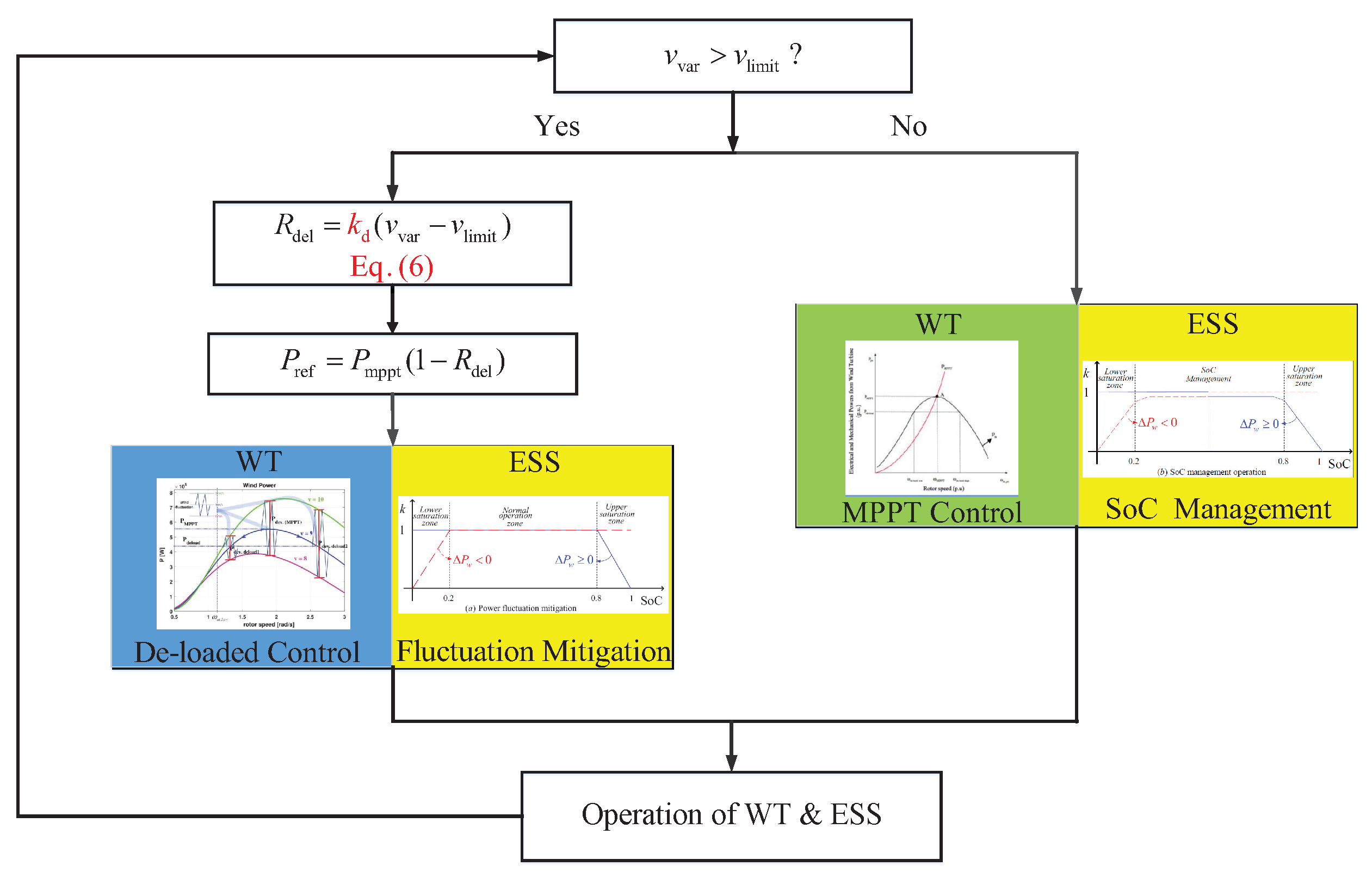
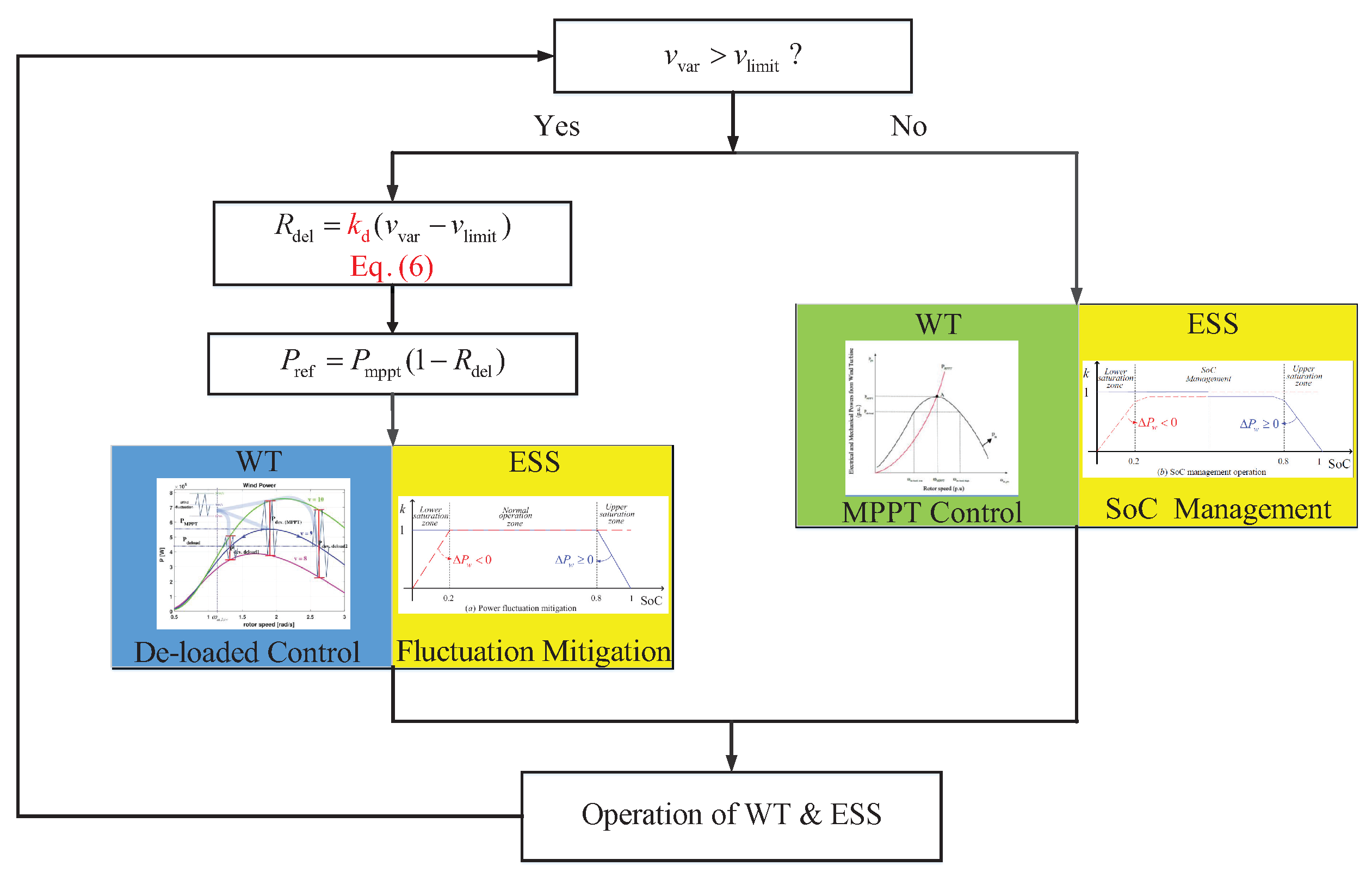
3. Proposed Control Strategy
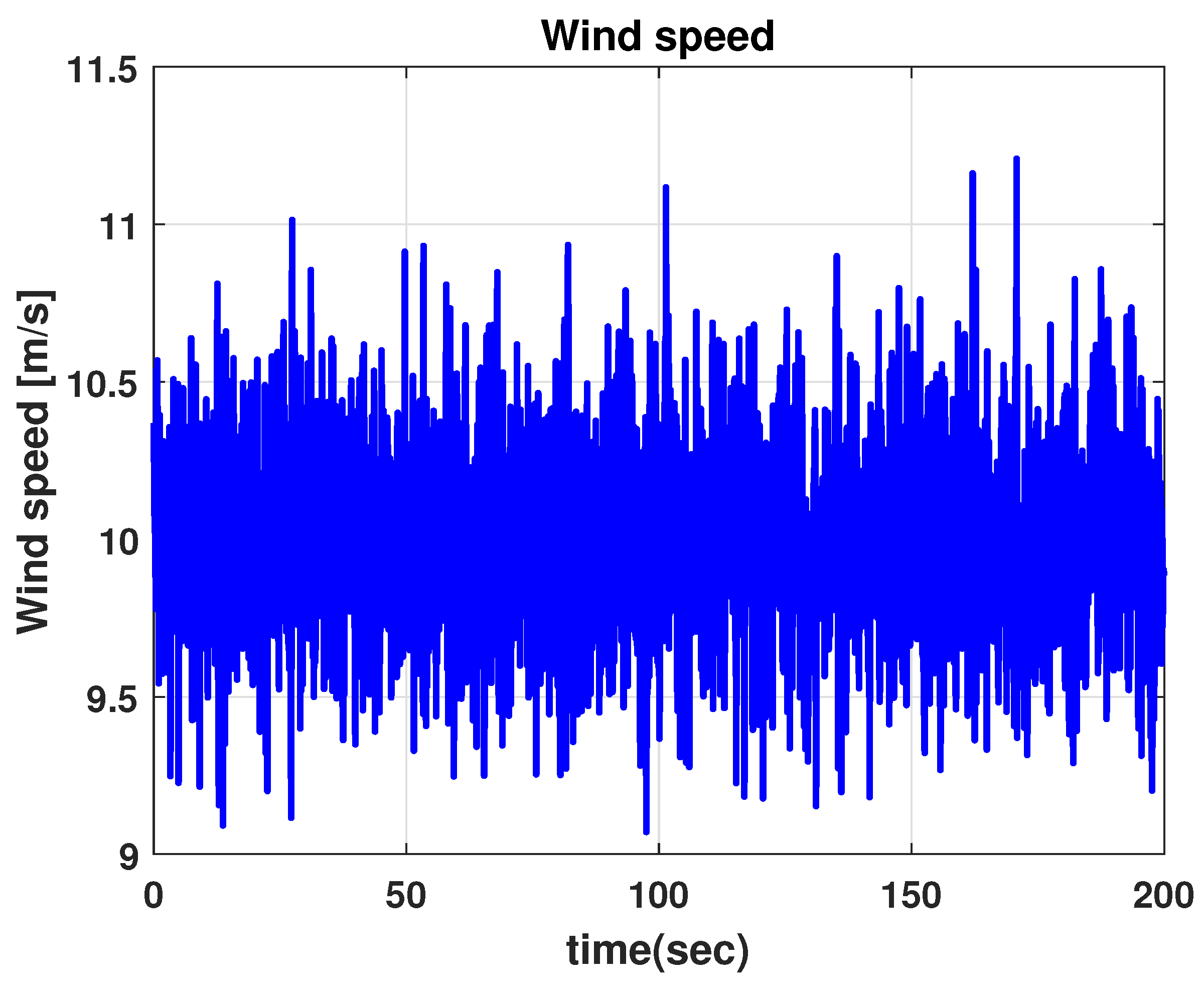
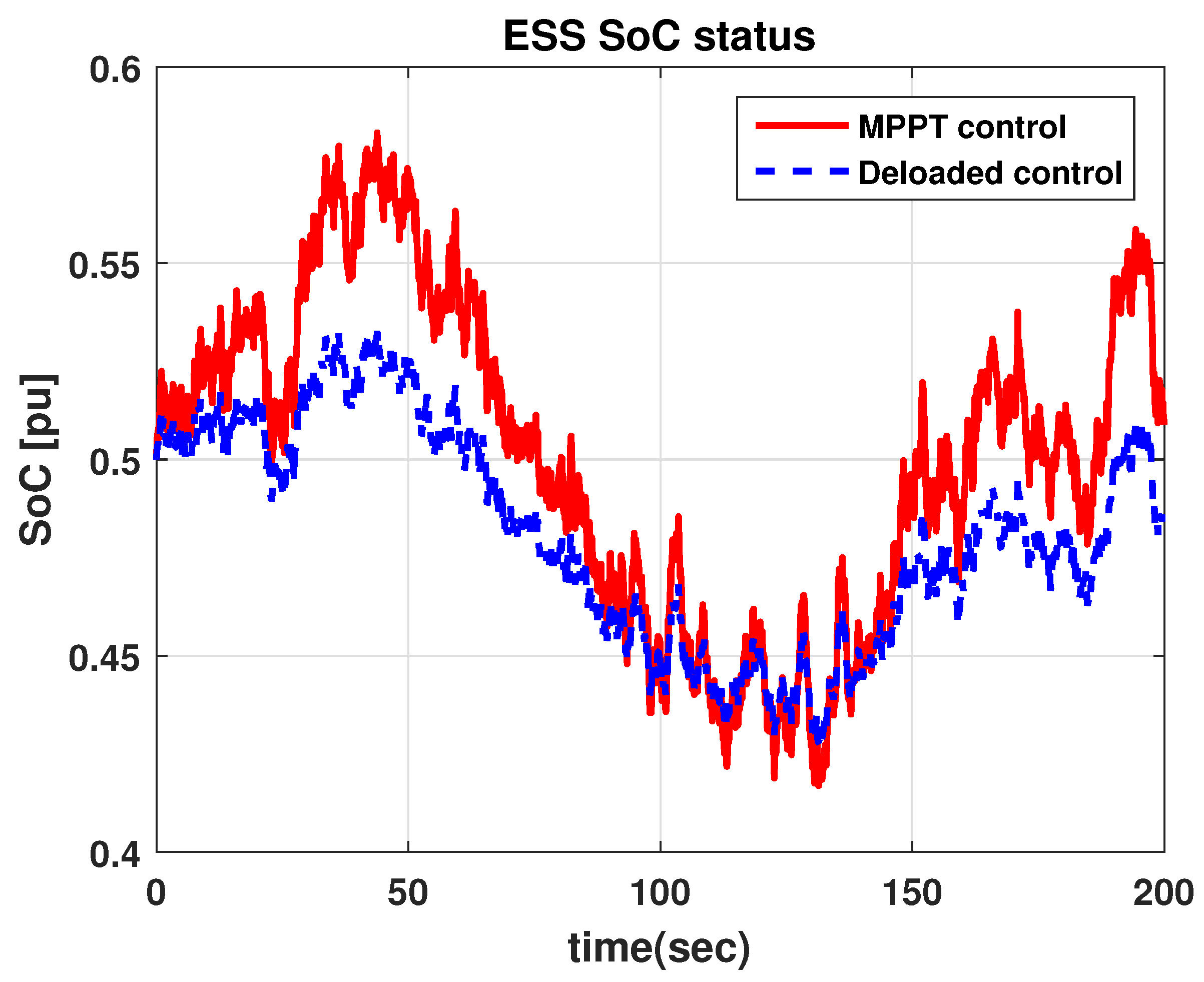
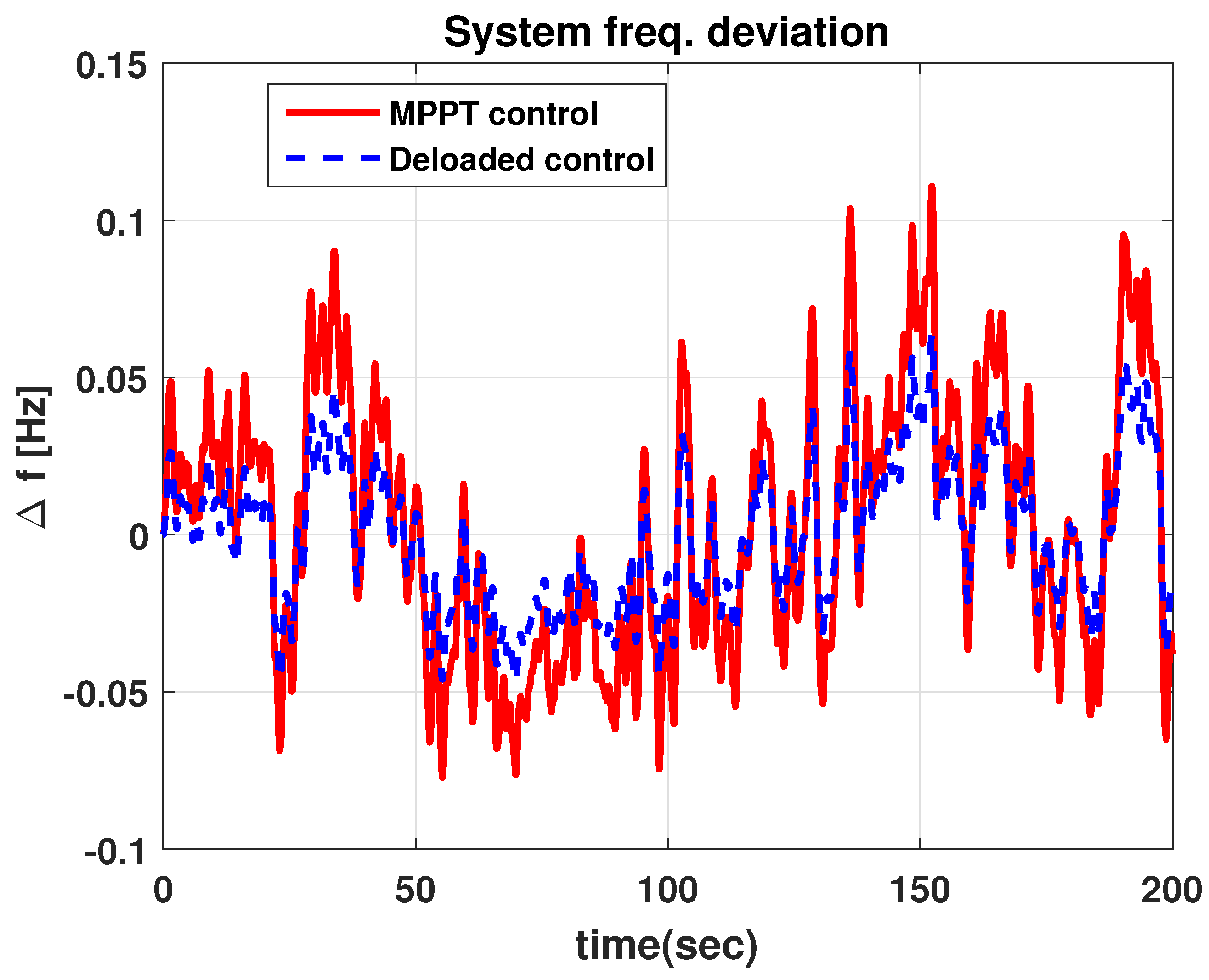
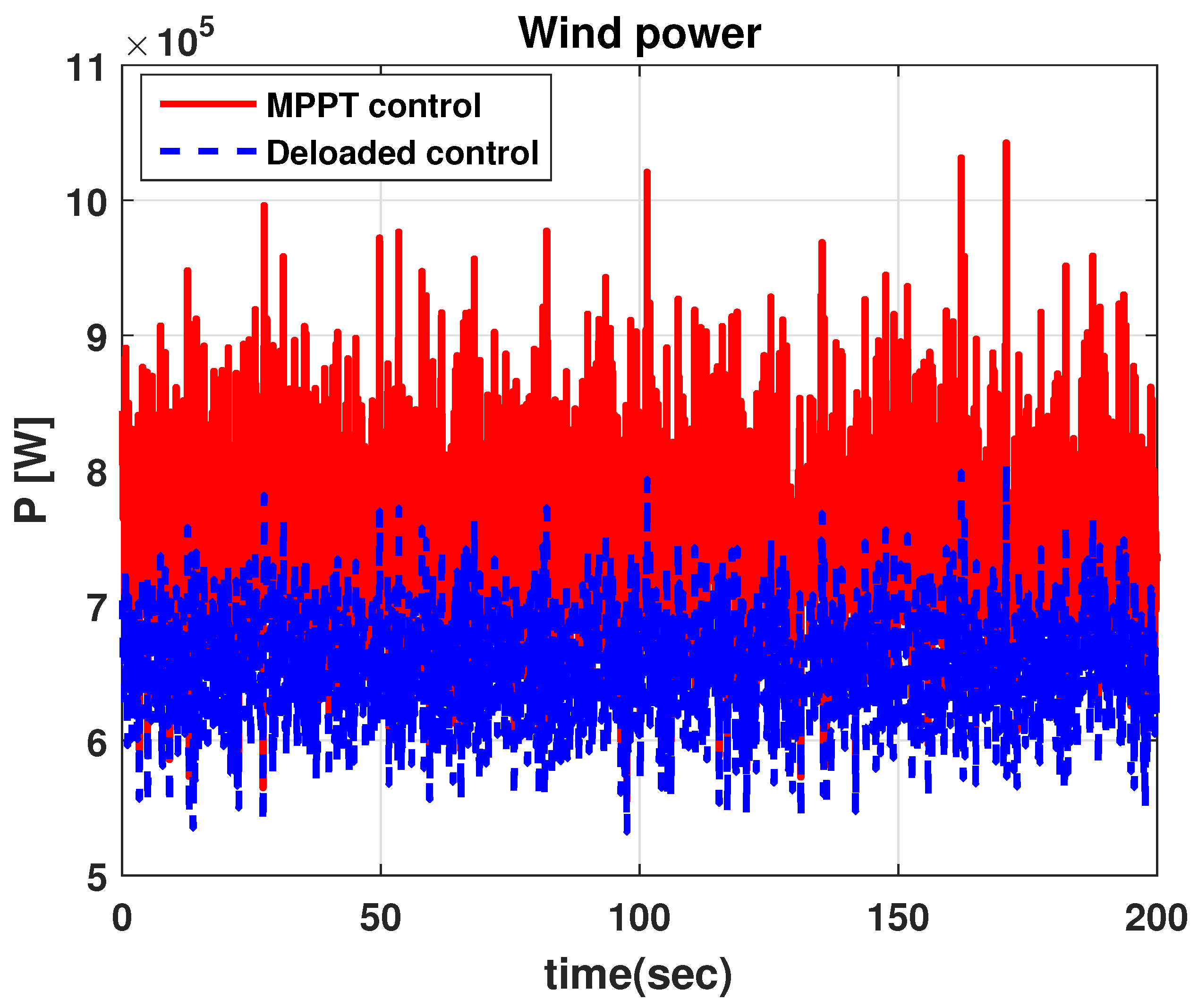
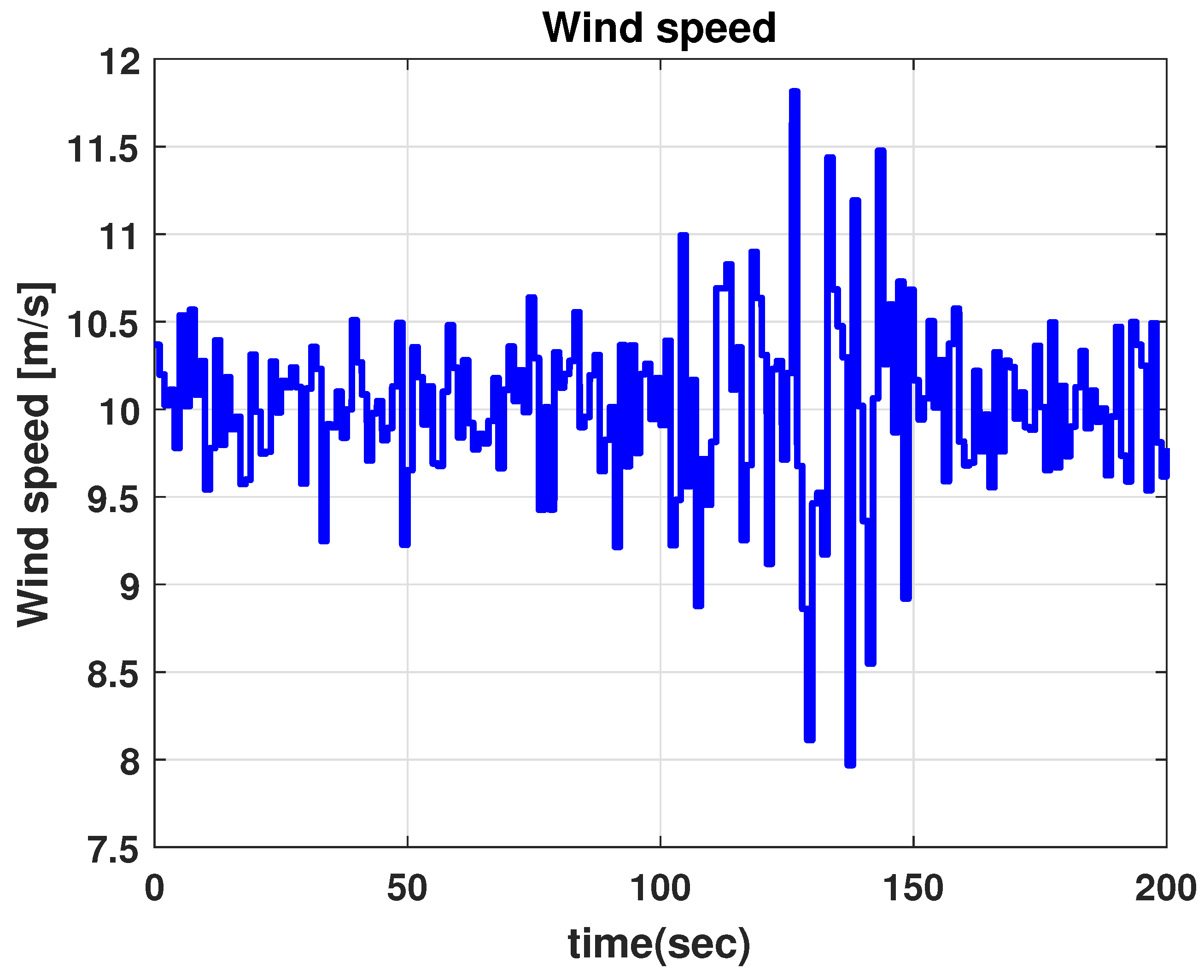
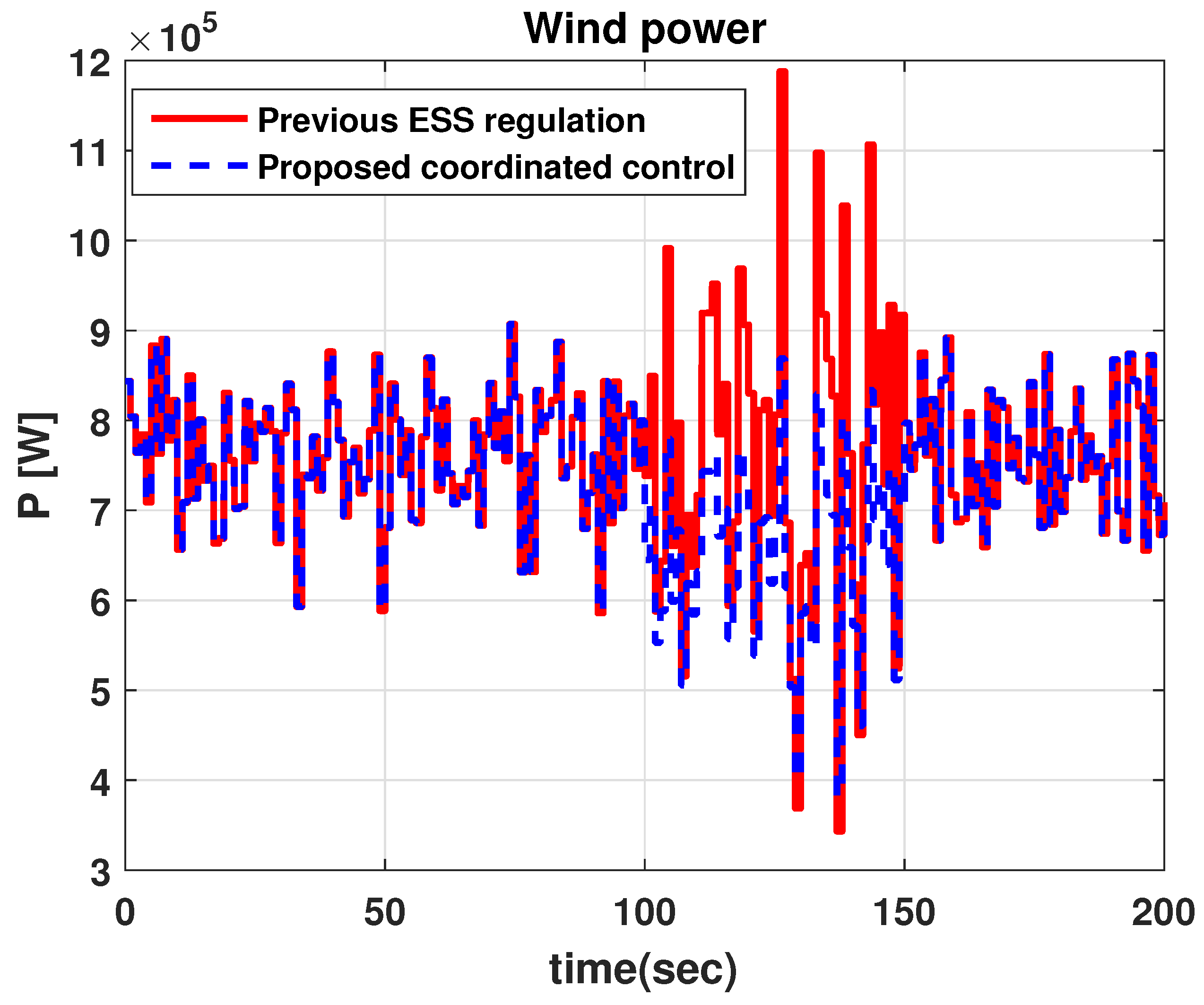
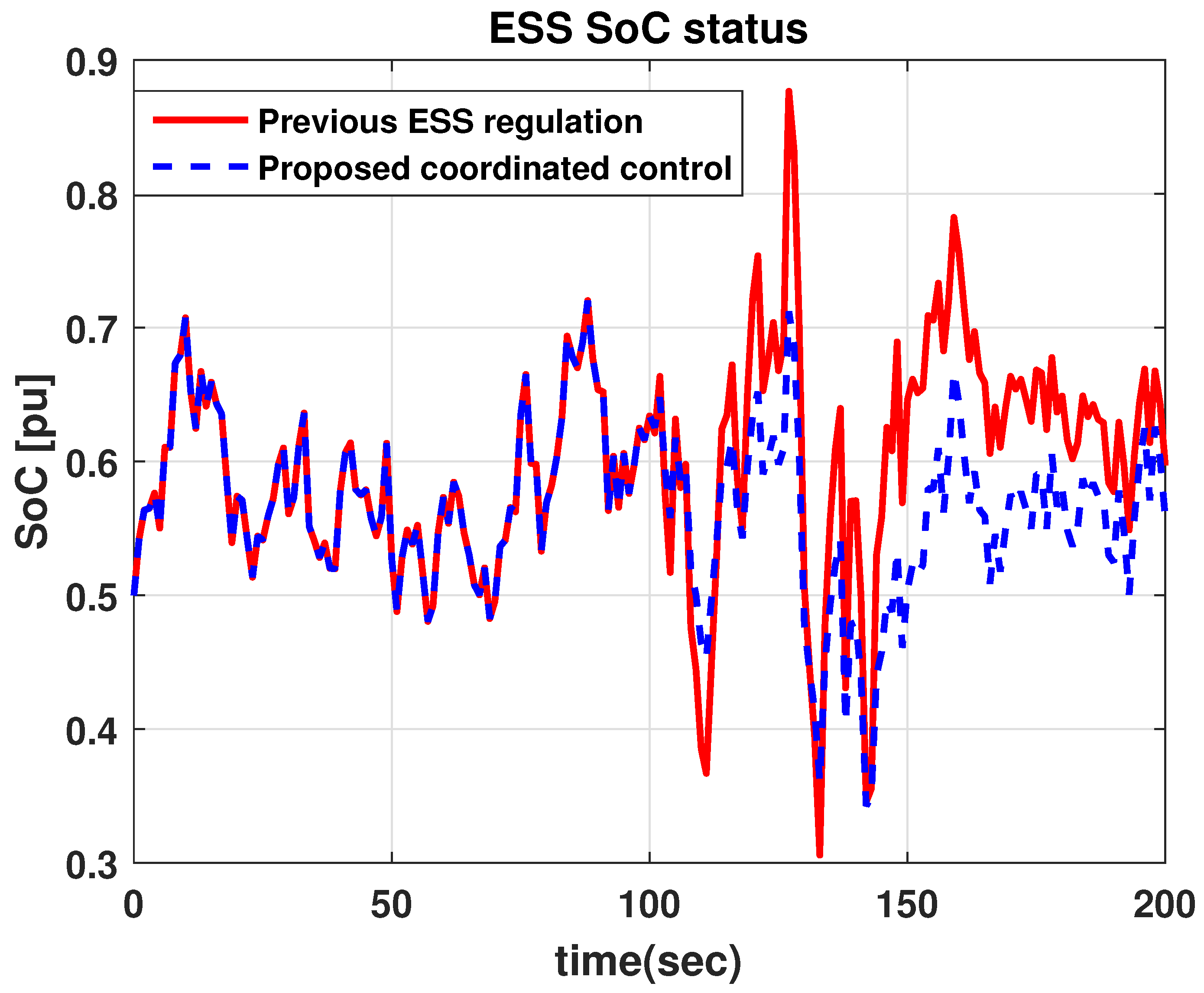
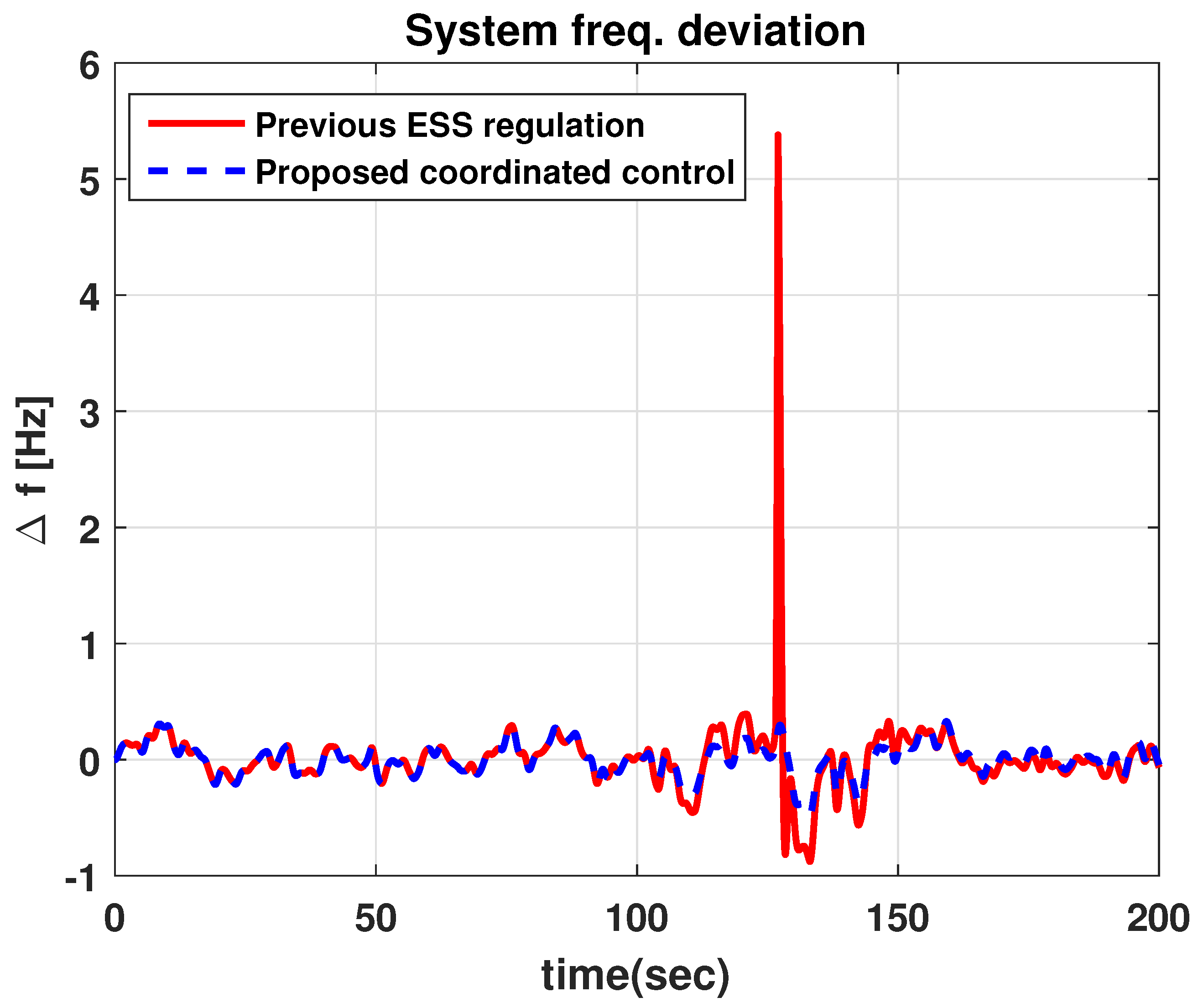
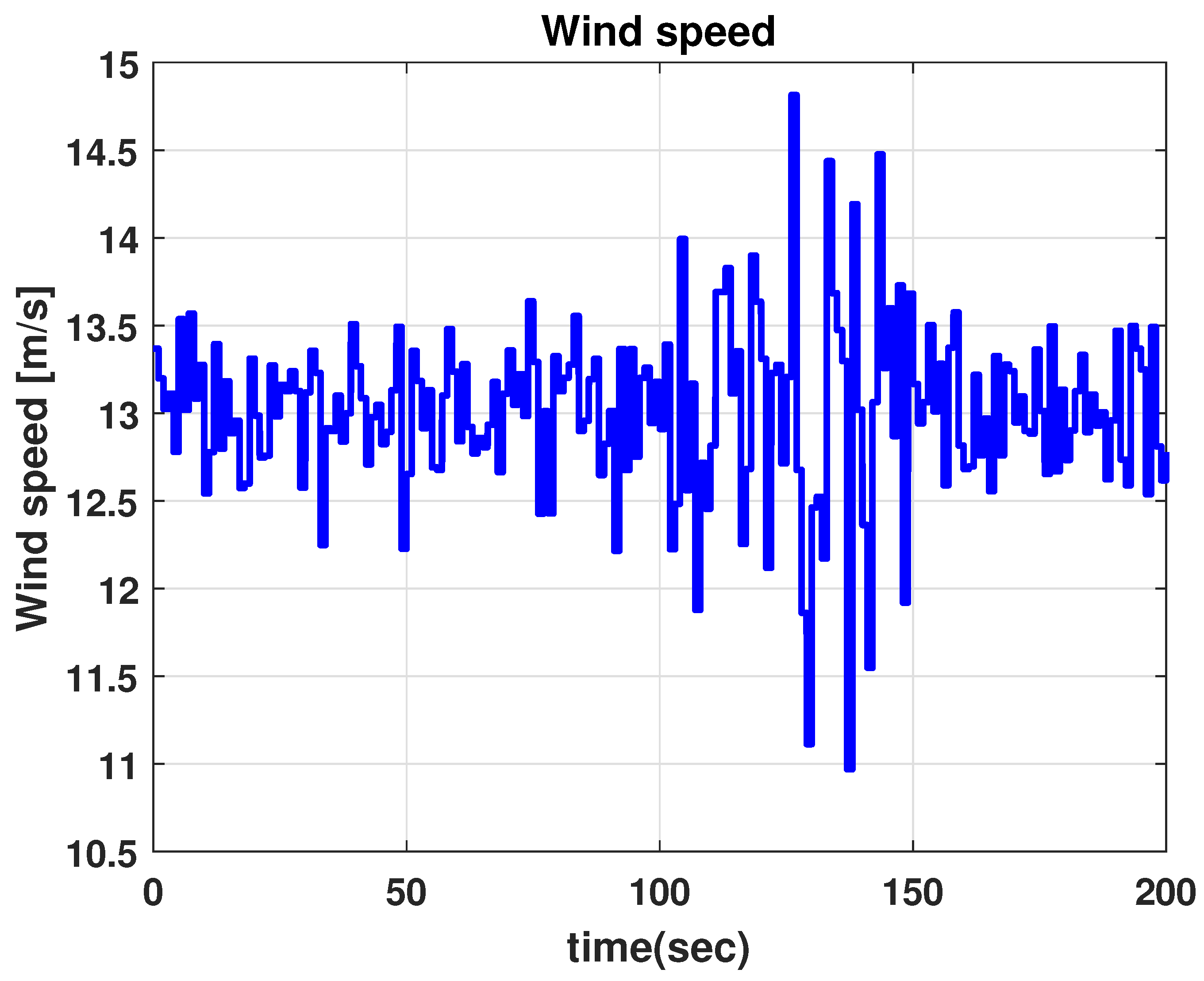
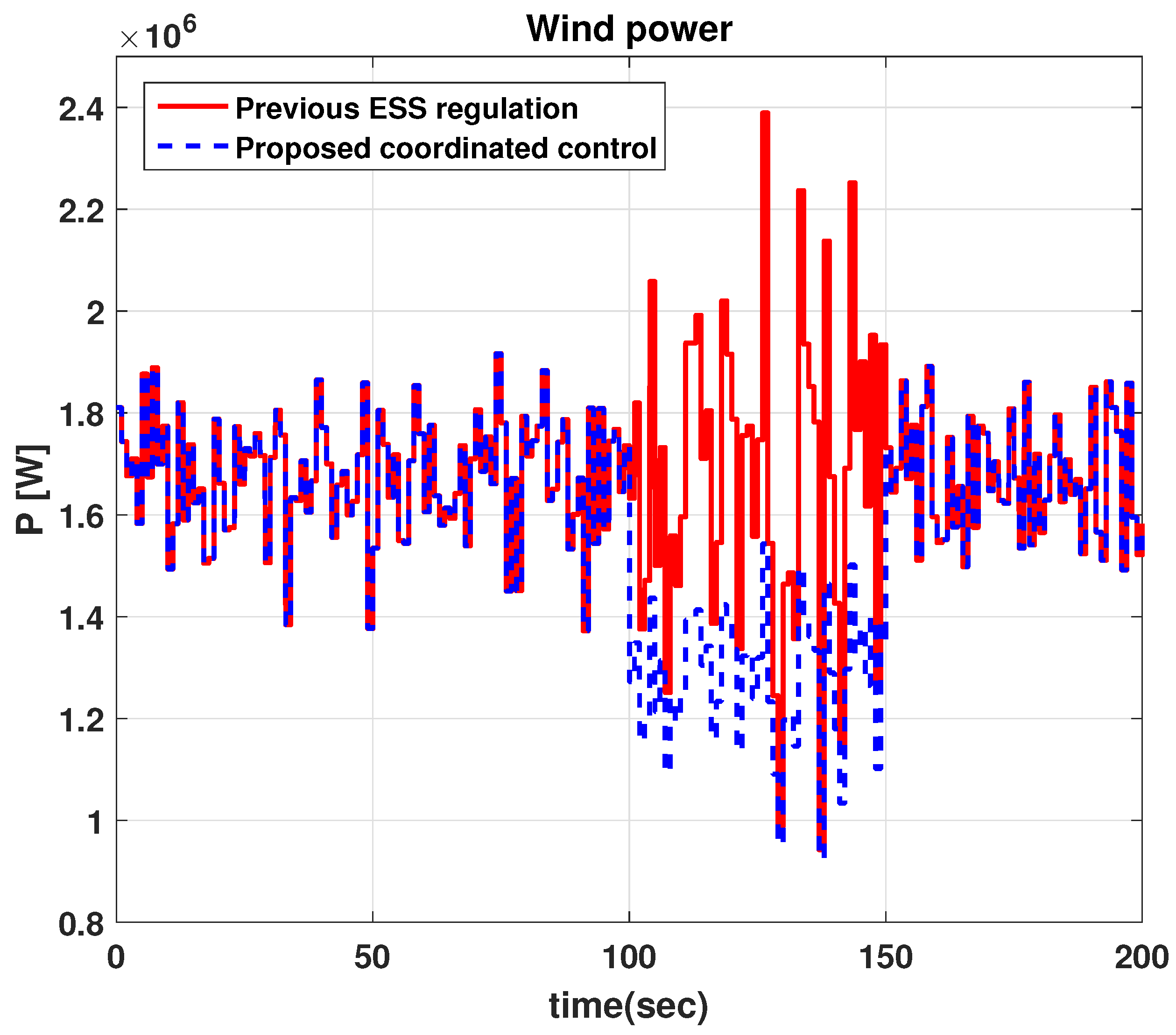
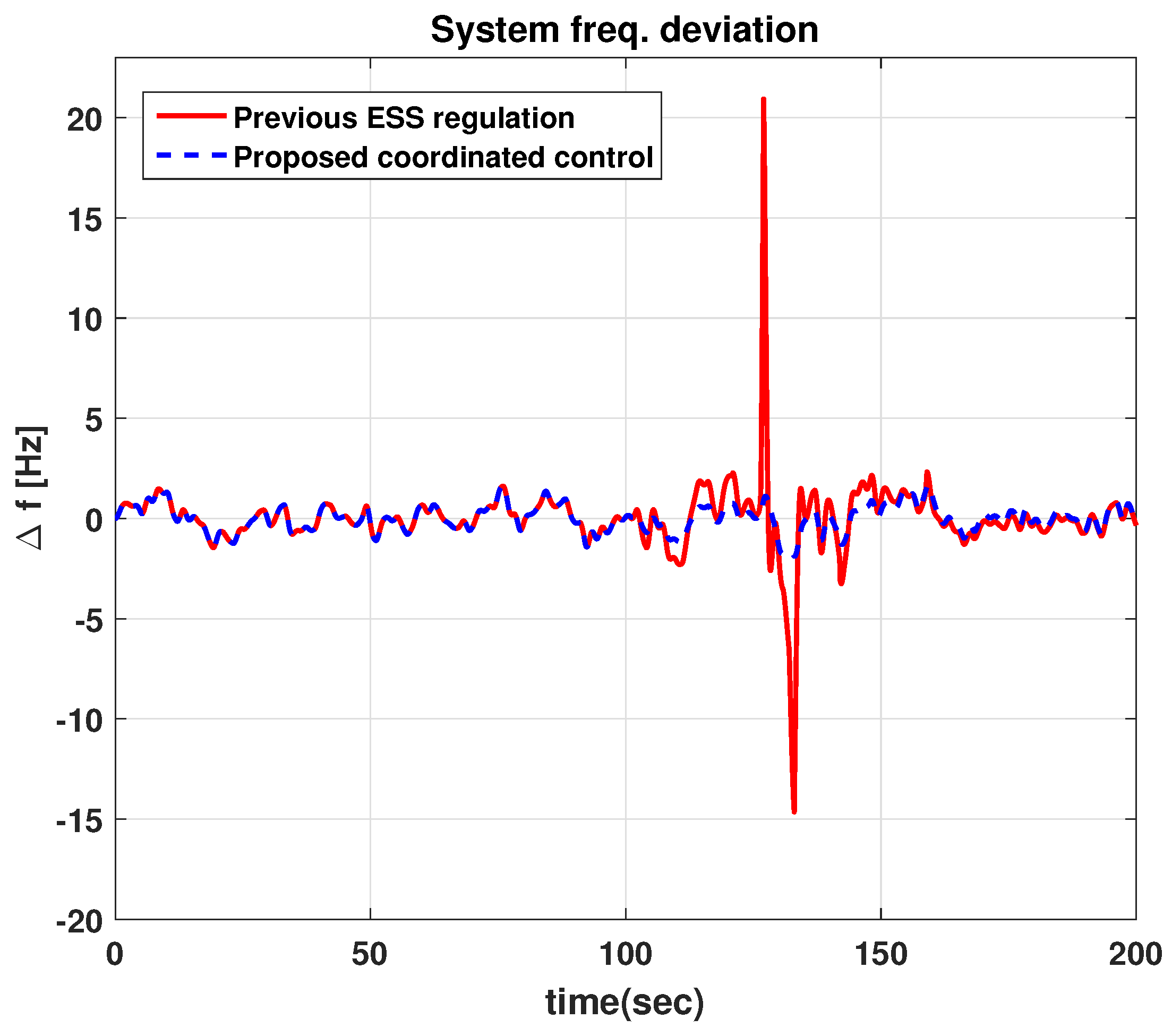
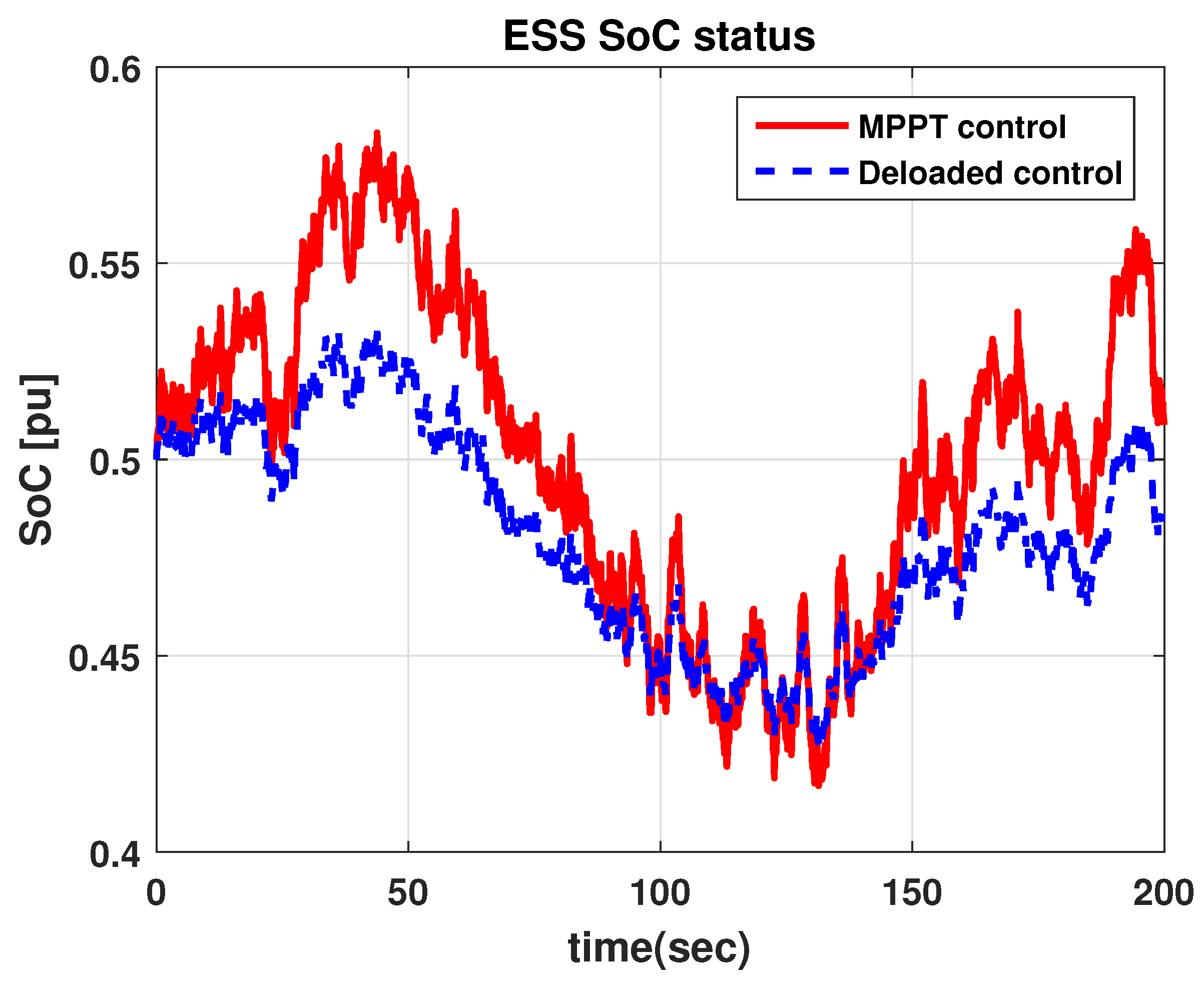
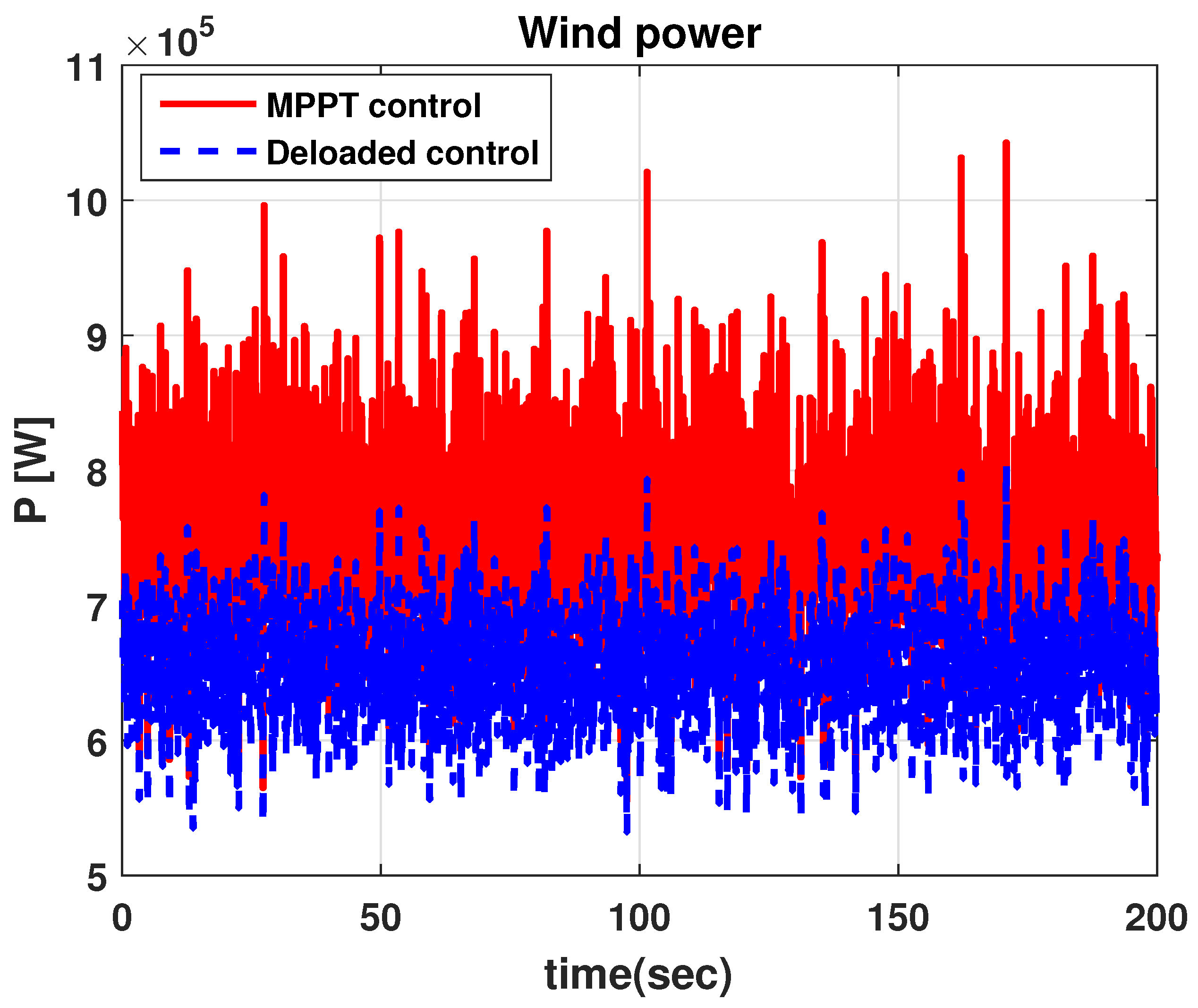
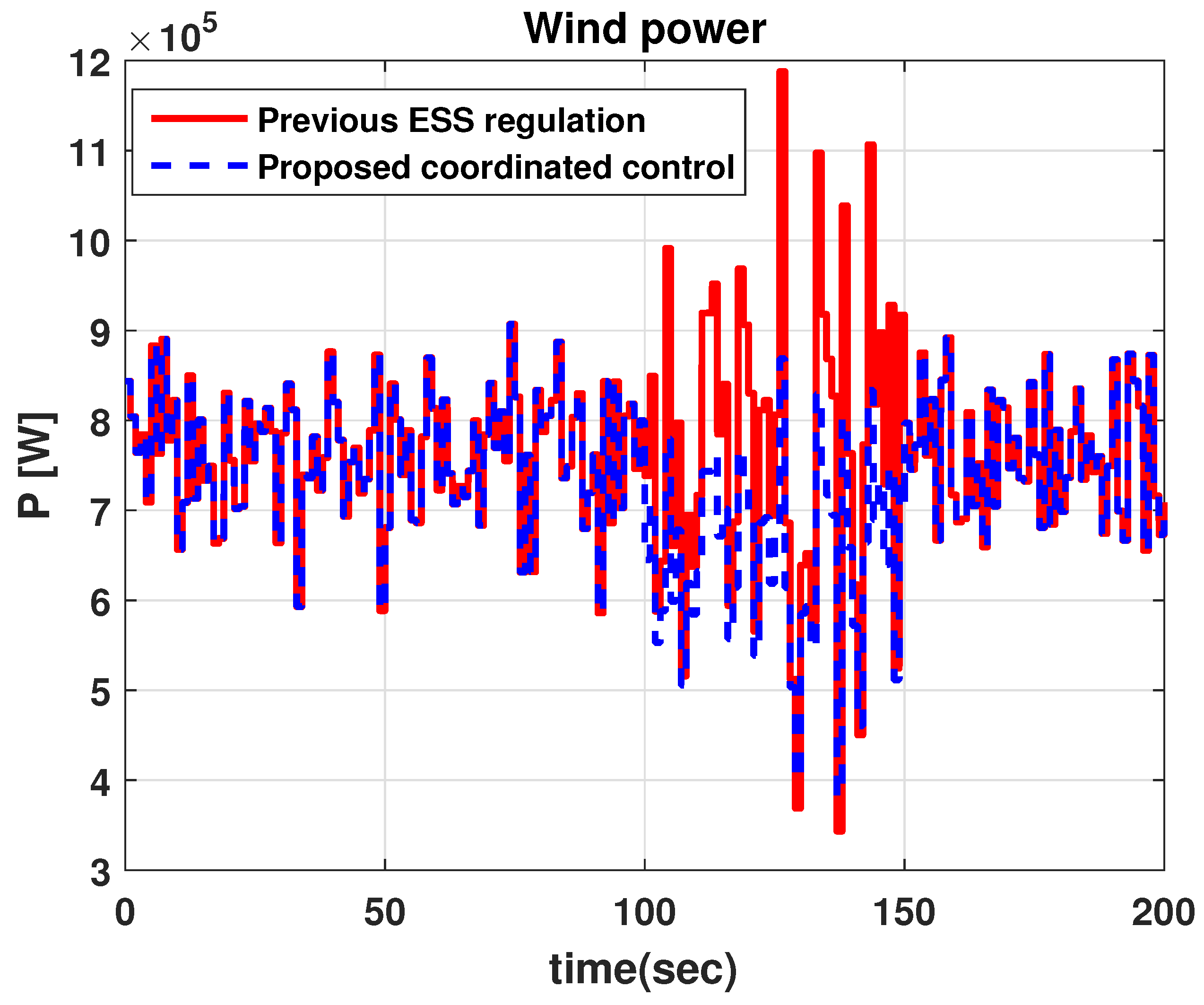
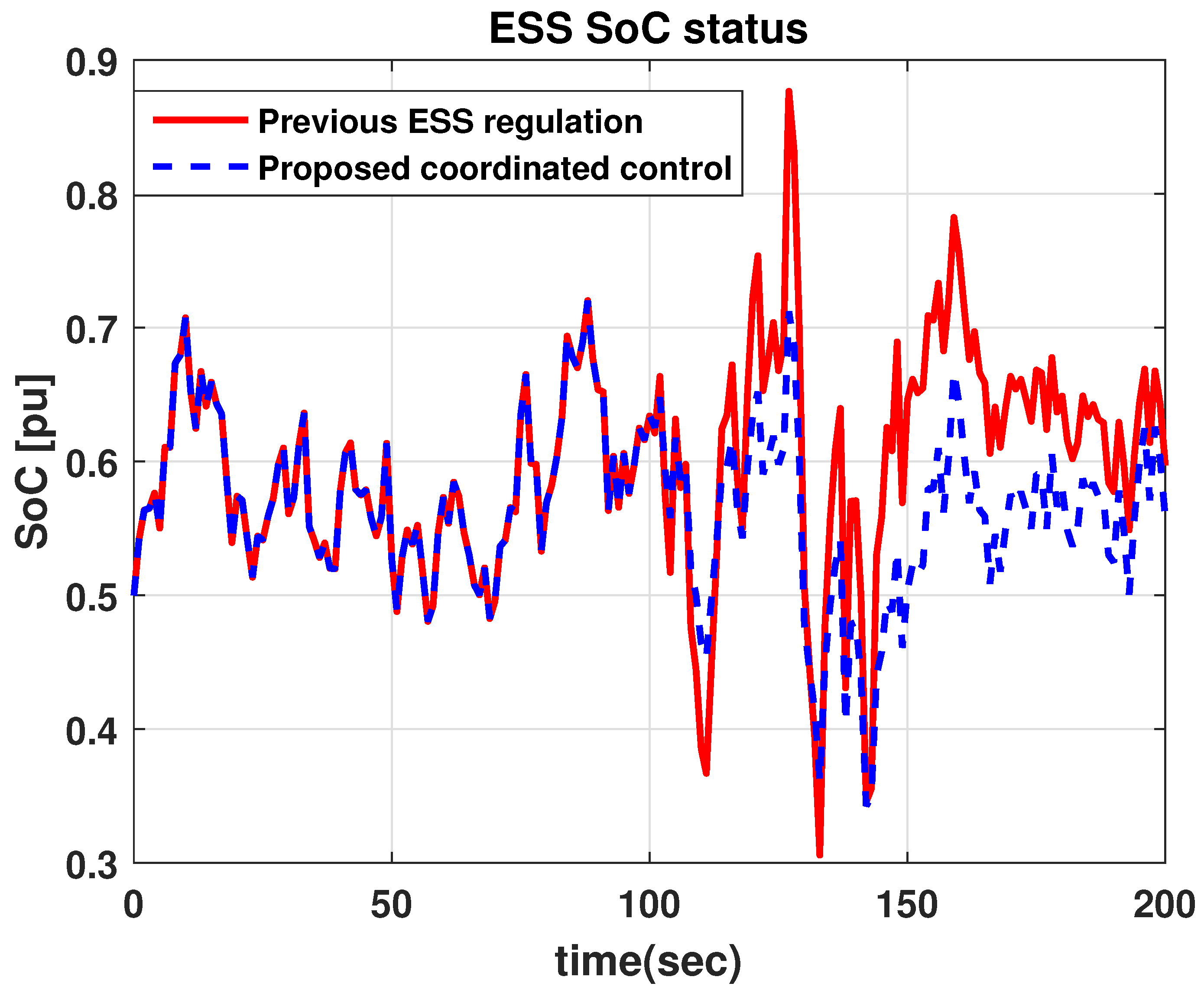
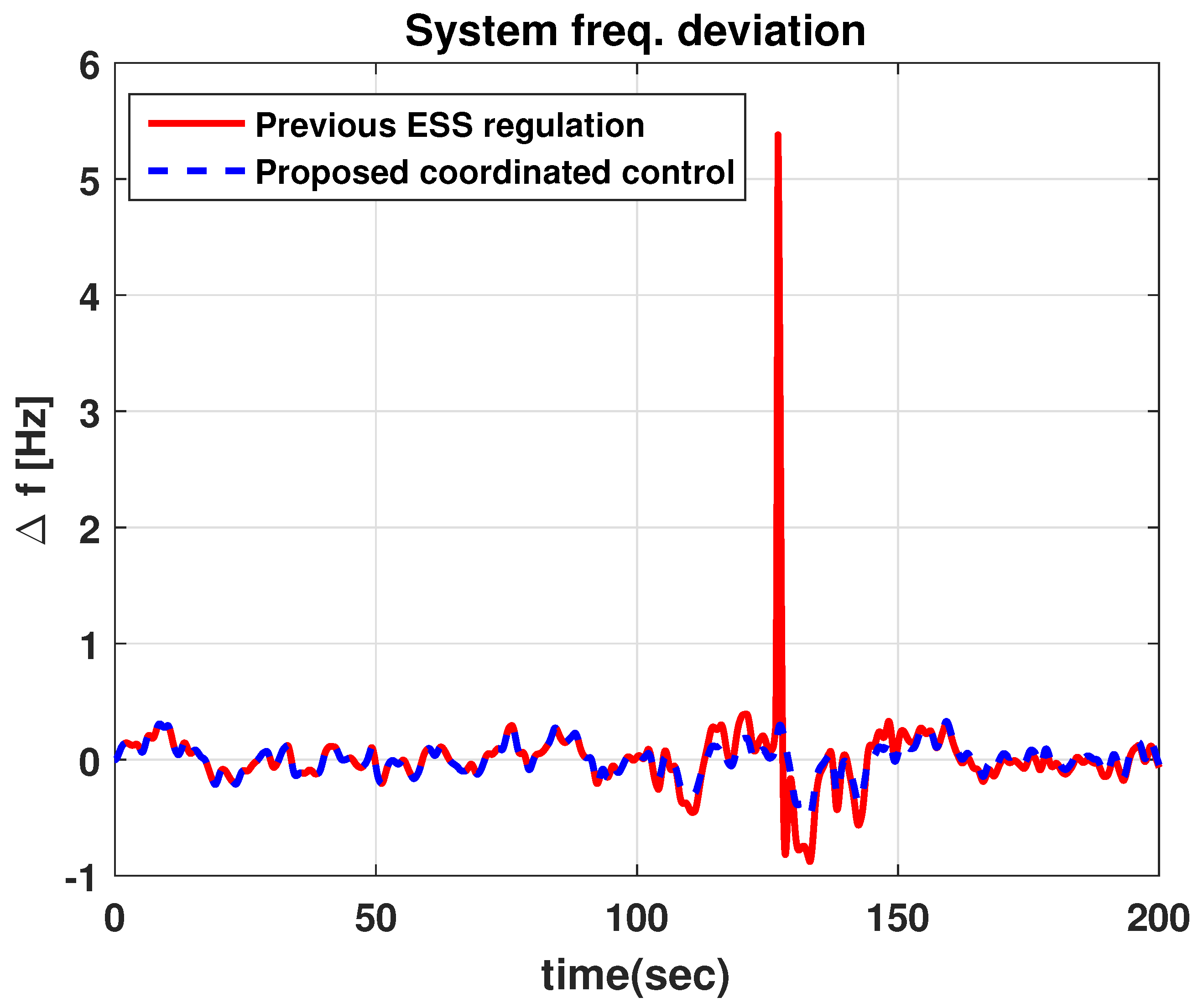
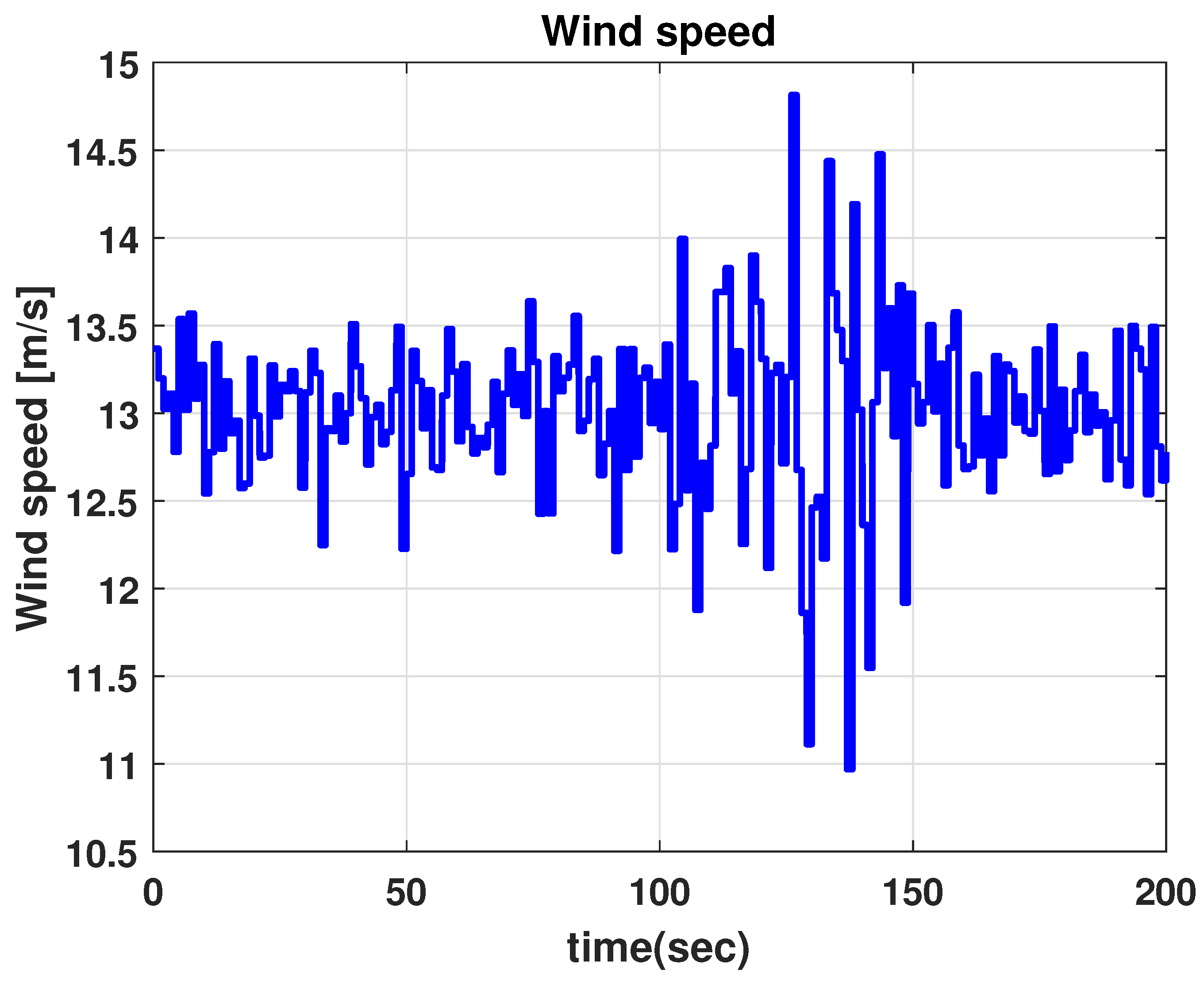
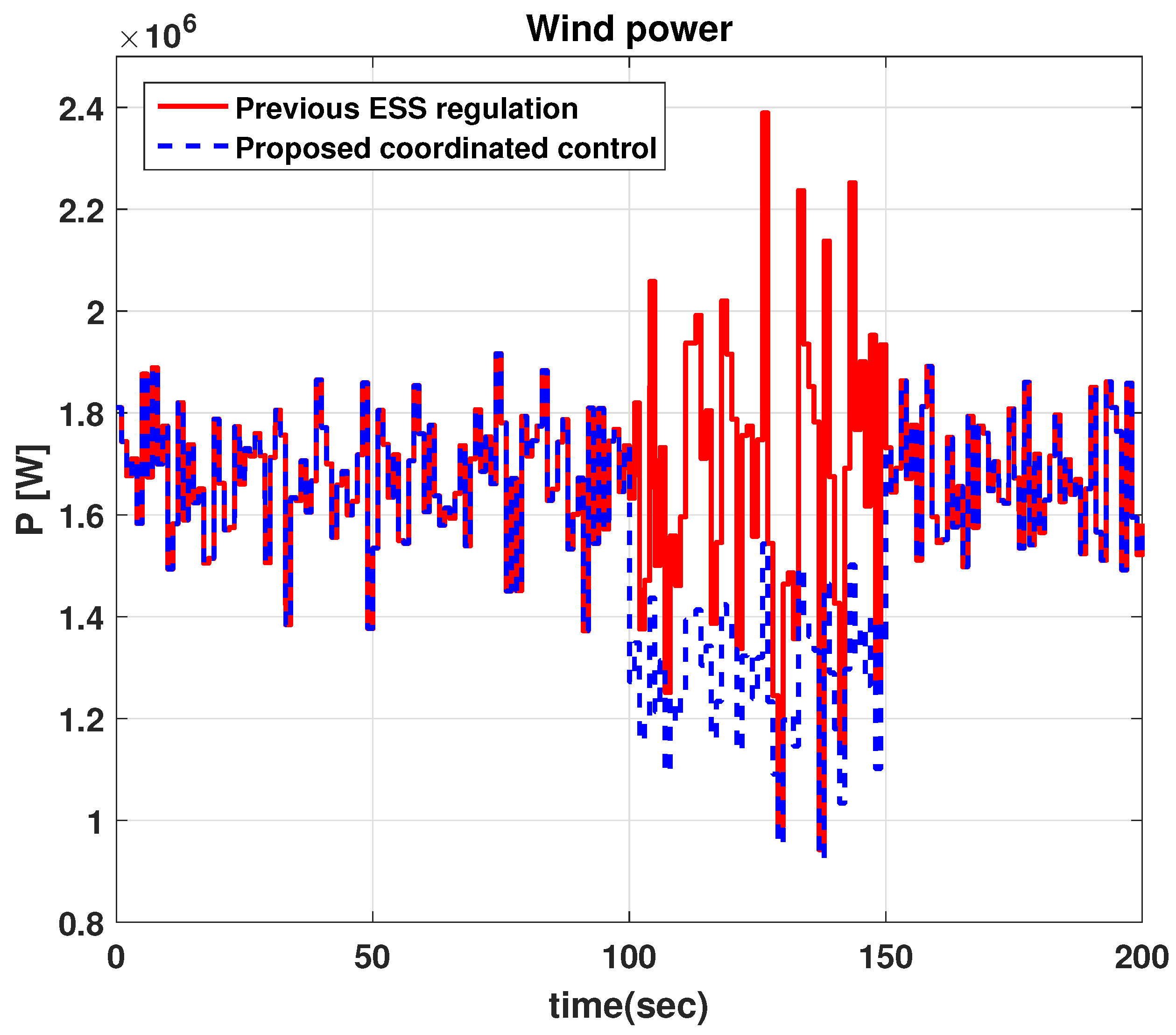
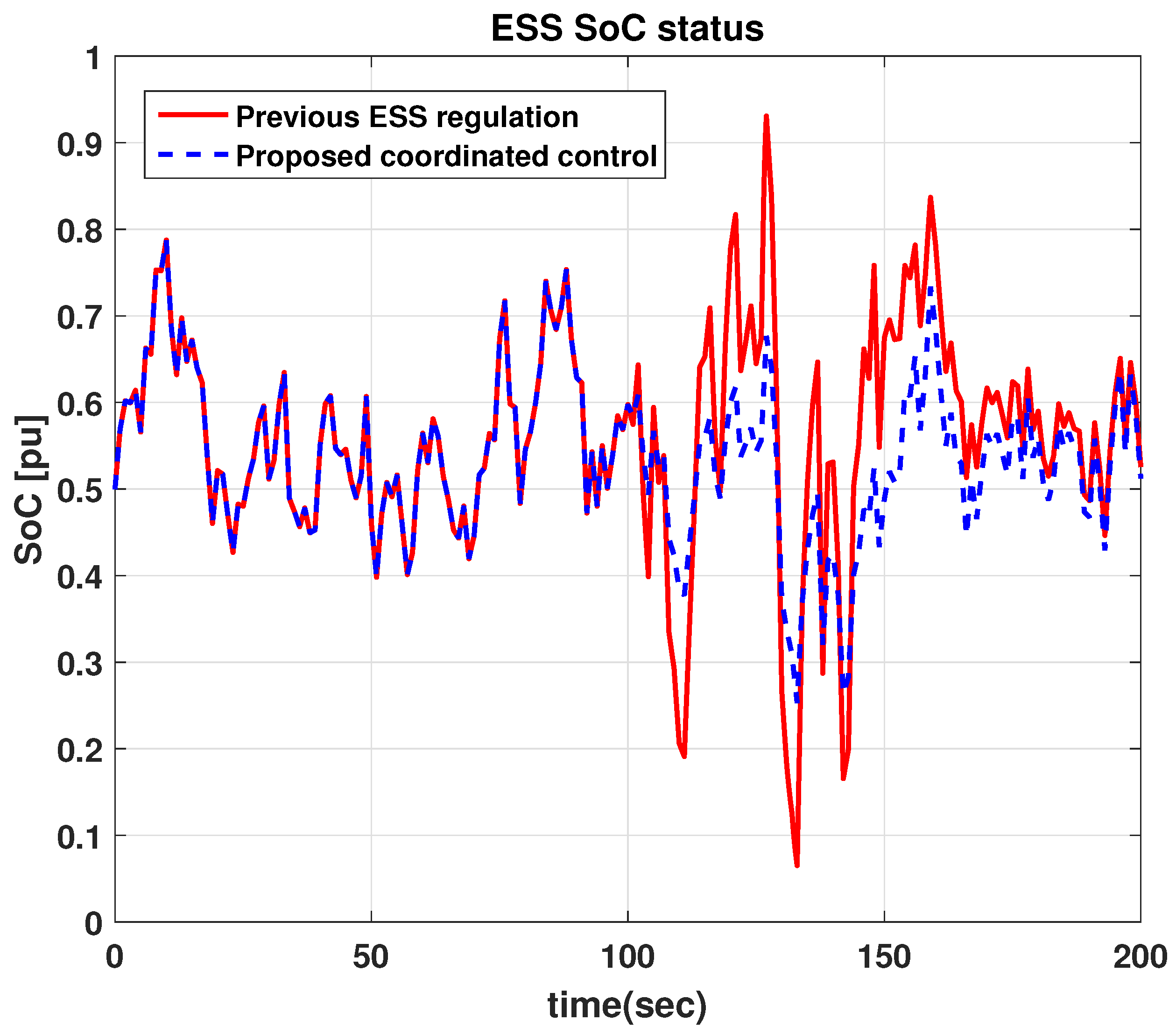
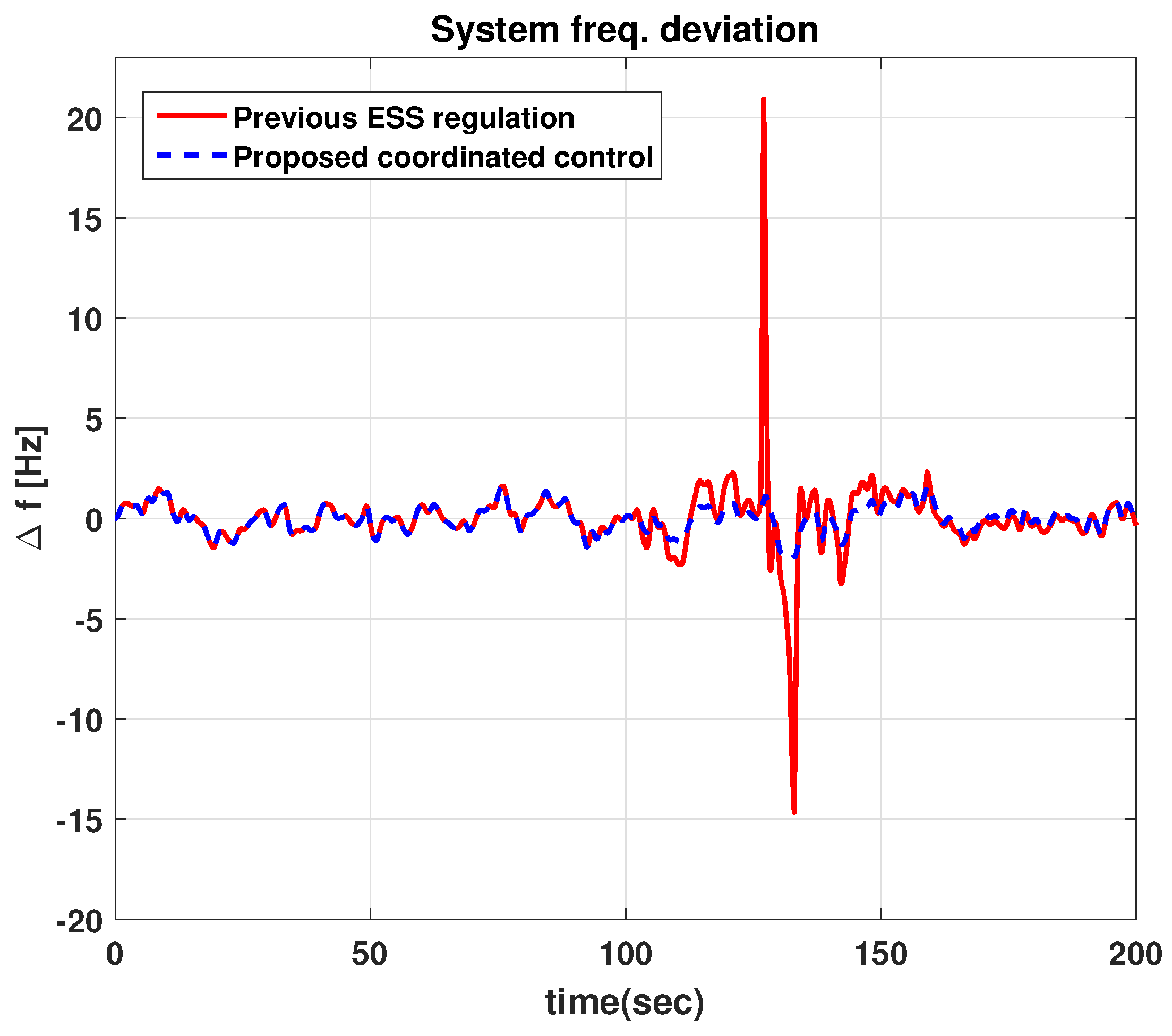
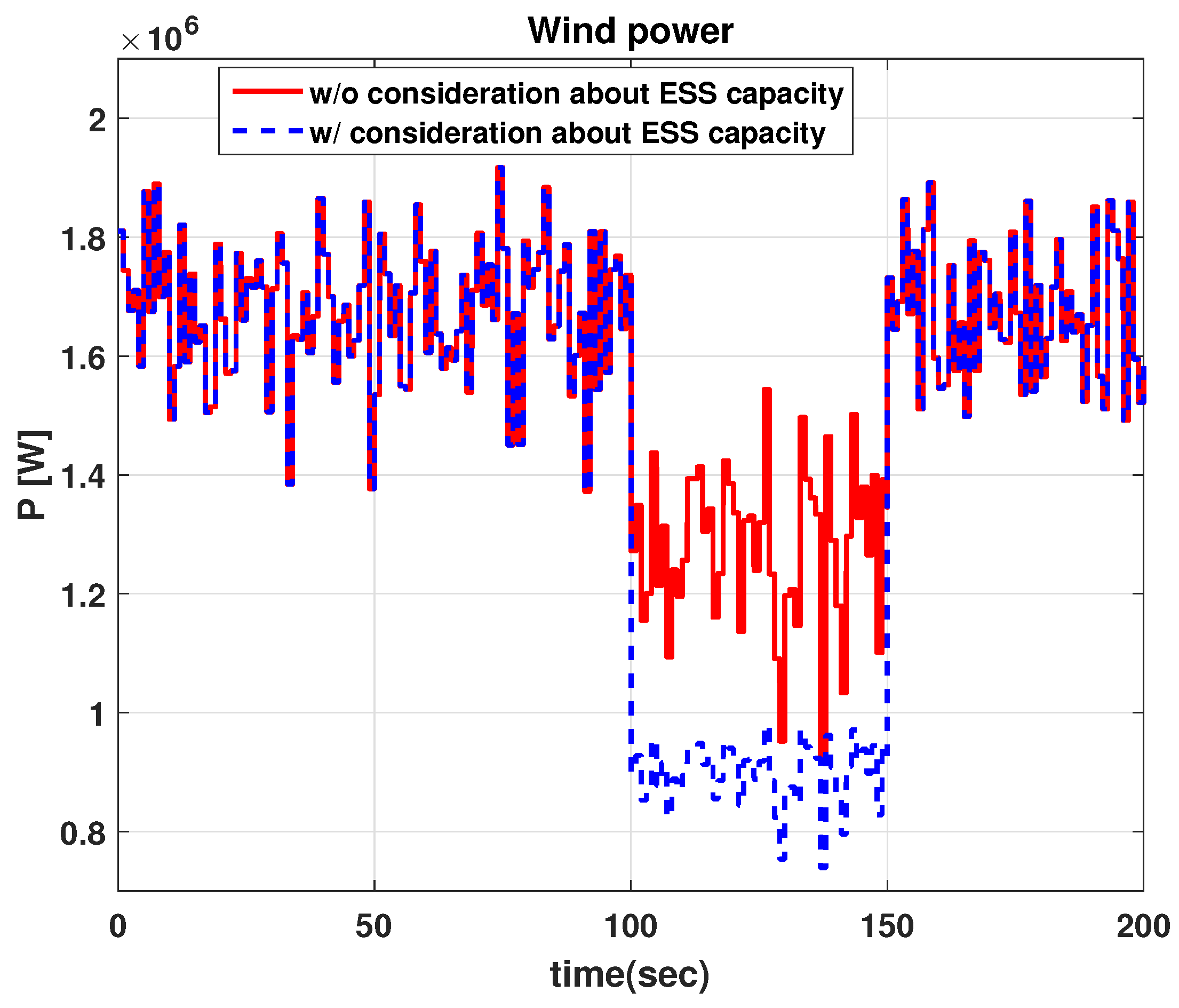
4. Simulation Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| AGC | Automated Generation Control. |
| A | Blade swept area (m) |
| Scaling factor for defining de-loaded operation parameter | |
| Wind turbine power efficiency coefficient | |
| Energy capacity of an ESS (Wh) | |
| De-loaded operation parameter | |
| k | Parameter for SoC management |
| Wind power (W) | |
| Filtered wind power (low frequency component) (W) | |
| ESS charging power (W) | |
| Wind power fluctuation (W) | |
| Power variation of conventional generator, i (W) | |
| De-loaded power factor indicating reduced power proportion | |
| State of Charge (pu) | |
| Wind speed variance | |
| Average wind speed (m/s) | |
| Wind speed variance limit for deciding when de-loaded operation starts | |
| Stored energy of an ESS (Wh) | |
| air density (kg/m) | |
| Grid frequency variation (Hz) | |
| Turbine mechanical rotor speed (pu) | |
| Tip speed ratio of WT variable | |
| WT blade pitch angle (deg) |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Sampling time | 1 | s |
| Rated power | 2 | MW |
| Rated wind speed | 13.8 | m/s |
| Average wind speed | 10 & 13 | m/s |
| Wind speed random variance | 0.1 to 0.5 | |
| Max.power coeff. | 0.4382 | |
| Optimal tip speed ratio | 6.32 | |
| Blade radius | 30 | m |
| Air density | 1.225 | kg/m |
| 0.51 | ||
| 0.2 | ||
| 555 (1 pu) | Wh |

References
- Kim, C.; Gui, Y.; Chung, C.C. Maximum Power Point Tracking of a Wind Power Plant with Predictive Gradient Ascent Method. IEEE Trans. Sustain. Energy 2017, 8, 685–694. [Google Scholar] [CrossRef]
- Kim, C.; Gui, Y.; Chung, C.C.; Kang, Y.-C. A Model-Free Method for Wind Power Plant Control with Variable Wind. In Proceedings of the IEEE Power Energy Society General Meeting, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]
- Calif, R.; Schmitt, F.G.; Huang, Y. Multifractal Description of Wind Power Using Arbitrary Order Hilbert Spectral Analysis. Phys. A Stat. Mech. Appl. 2013, 392, 4106–4120. [Google Scholar] [CrossRef]
- Calif, R.; Schmitt, F.G. Modeling of atmospheric wind speed sequence using a lognormal continuous stochastic equation. J. Wind Eng. Ind. Aerodyn. 2012, 109, 1–8. [Google Scholar] [CrossRef]
- Calif, R.; Schmitt, F.G. Multiscaling and Joint Multiscaling Description of the Atmospheric Wind Speed and The Aggregate Power Output from a Wind Farm. J. Wind Eng. Ind. Aerodyn. 2014, 21, 379–392. [Google Scholar] [CrossRef] [Green Version]
- Kim, C.; Gui, Y.; Chung, C.C. Coordinated Wind Power Plant Control for Frequency Support under Wake Effects. In Proceedings of the IEEE Power Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar]
- Vazquez, S.; Lukic, S.M.; Galvan, E.; Franquelo, L.G.; Carrasco, J.M. Energy Storage Systems for Transport and Grid Applications. IEEE Trans. Ind. Electron. 2010, 57, 3881–3895. [Google Scholar] [CrossRef]
- Wang, W.; Mao, C.; Lu, J.; Wang, D. An Energy Storage System Sizing Method for Wind Power Integration. Energies 2013, 6, 3392–3404. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, Q.; Hu, S.; Xu, H.; Rasmussen, C.N. Review of Energy Storage System for Wind Power Integration Support. Appl. Energy 2015, 137, 545–553. [Google Scholar] [CrossRef]
- Li, W.; Joós, G. Comparison of energy storage system technologies and configurations in a wind farm. In Proceedings of the IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; pp. 1280–1285. [Google Scholar]
- Kook, K.S.; McKenzie, K.J.; Liu, Y.; Atcitty, S. A Study on applications of Energy Storage for the Wind Power Operation in Power Systems. In Proceedings of the IEEE Power Energy Society General Meeting, Montreal, QC, Canada, 18–22 June 2006; pp. 1–5. [Google Scholar]
- Ding, M.; Wu, J. A Novel Control Strategy of Hybrid Energy Storage System for Wind Power Smoothing. Electr. Power Compon. Syst. 2017, 45, 1265–1274. [Google Scholar] [CrossRef]
- Tang, X.; Sun, Y.; Zhou, G.; Miao, F. Coordinated Control of Multi-Type Energy Storage for Wind Power Fluctuation Suppression. Energies 2017, 10, 1212. [Google Scholar] [CrossRef]
- Yang, J.-S.; Choi, J.-Y.; An, G.-H.; Choi, Y.-J.; Kim, M.-H.; Won, D.-J. Optimal Scheduling and Real-Time State-of-Charge Management of Energy Storage System for Frequency Regulation. Energies 2016, 9, 1010. [Google Scholar] [CrossRef]
- Shi, J.; Lee, W.-J.; Liu, X. Generation Scheduling Optimization of Wind-Energy Storage System Based on Wind Power Output Fluctuation Features. IEEE Trans. Ind. Appl. 2017, 1–7. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, Q.; Guo, Q.; Sun, H.; Xue, Y. Optimal Active Power Control of a Wind Farm Equipped with Energy Storage System based on Distributed Model Predictive Control. IET Gener. Transm. Distrib. 2016, 10, 669–677. [Google Scholar] [CrossRef] [Green Version]
- Dang, J.; Seuss, J.; Suneja, L.; Harley, R.G. SoC Feedback Control for Wind and ESS Hybrid Power System Frequency Regulation. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 79–86. [Google Scholar] [CrossRef]
- Yun, J.Y.; Yu, G.; Kook, K.S.; Rho, D.H.; Chang, B.H. SoC-based Control Strategy of Battery Storage System for Power System Frequency Regulation. Trans. Korean Inst. Electr. Eng. 2014, 63, 622–628. [Google Scholar] [CrossRef]
- Jiang, Q.; Gong, Y.; Wang, H. A Battery Energy Storage System Dual-Layer Control Strategy for Mitigating Wind Farm Fluctuations. IEEE Trans. Power Syst. 2013, 28, 3263–3273. [Google Scholar] [CrossRef]
- Buckspan, A.; Pao, L.; Aho, J.; Fleming, P. Stability Analysis of a Wind Turbine Active Power Control System. In Proceedings of the American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 1418–1423. [Google Scholar]
- Muljadi, E.; Butterfield, C.P.; Parsons, B.; Ellis, A. Effect of Variable Speed Wind Turbine Generator on Stability of a Weak Grid. IEEE Trans. Energy Convers. 2007, 22, 29–36. [Google Scholar] [CrossRef]
- Li, W.; Joós, G.; Abbey, C. Wind Power Impact on System Frequency Deviation and an ESS based Power Filtering Algorithm Solution. In Proceedings of the IEEE Power Systems Conference and Exposition, Atlanta, GA, USA, 29 October–1 November 2006; pp. 2077–2084. [Google Scholar]
- Loukarakis, E.; Margaris, I.; Moutis, P. Frequency Control Support and Participation Methods Provided by Wind Generation. In Proceedings of the IEEE Electrical Power Energy Conference, Montreal, QC, Canada, 22–23 October 2009; pp. 1–6. [Google Scholar]
- Li, W. An Embedded Energy Storage System for Attenuation of Wind Power Fluctuations. Ph.D. Thesis, McGill University, Montreal, QC, Canada, May 2010. [Google Scholar]

© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, C.; Muljadi, E.; Chung, C.C. Coordinated Control of Wind Turbine and Energy Storage System for Reducing Wind Power Fluctuation. Energies 2018, 11, 52. https://doi.org/10.3390/en11010052
Kim C, Muljadi E, Chung CC. Coordinated Control of Wind Turbine and Energy Storage System for Reducing Wind Power Fluctuation. Energies. 2018; 11(1):52. https://doi.org/10.3390/en11010052
Chicago/Turabian StyleKim, Chunghun, Eduard Muljadi, and Chung Choo Chung. 2018. "Coordinated Control of Wind Turbine and Energy Storage System for Reducing Wind Power Fluctuation" Energies 11, no. 1: 52. https://doi.org/10.3390/en11010052
APA StyleKim, C., Muljadi, E., & Chung, C. C. (2018). Coordinated Control of Wind Turbine and Energy Storage System for Reducing Wind Power Fluctuation. Energies, 11(1), 52. https://doi.org/10.3390/en11010052