H? Robust Control of an LCL-Type Grid-Connected Inverter with Large-Scale Grid Impedance Perturbation


Abstract
:1. Introduction
2. Design of the H∞ Robust Current Controller Based on Mixed-Sensitivity Optimization
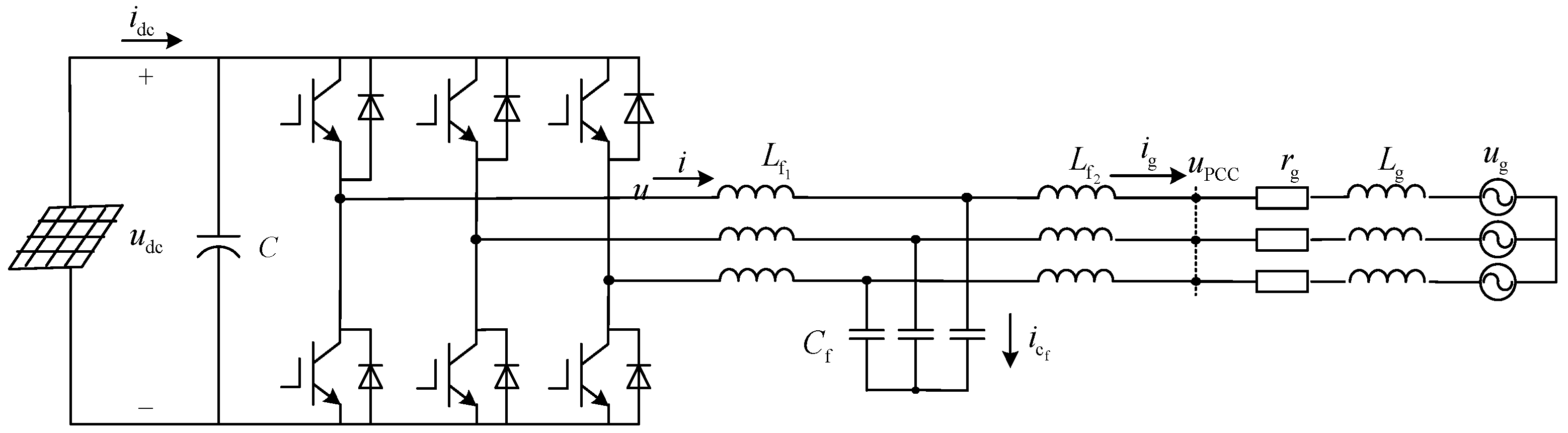
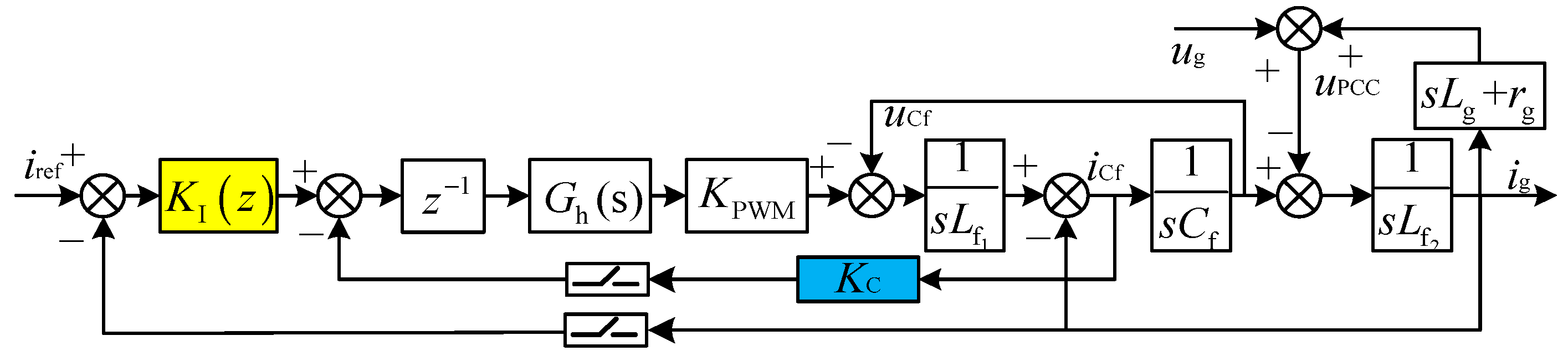
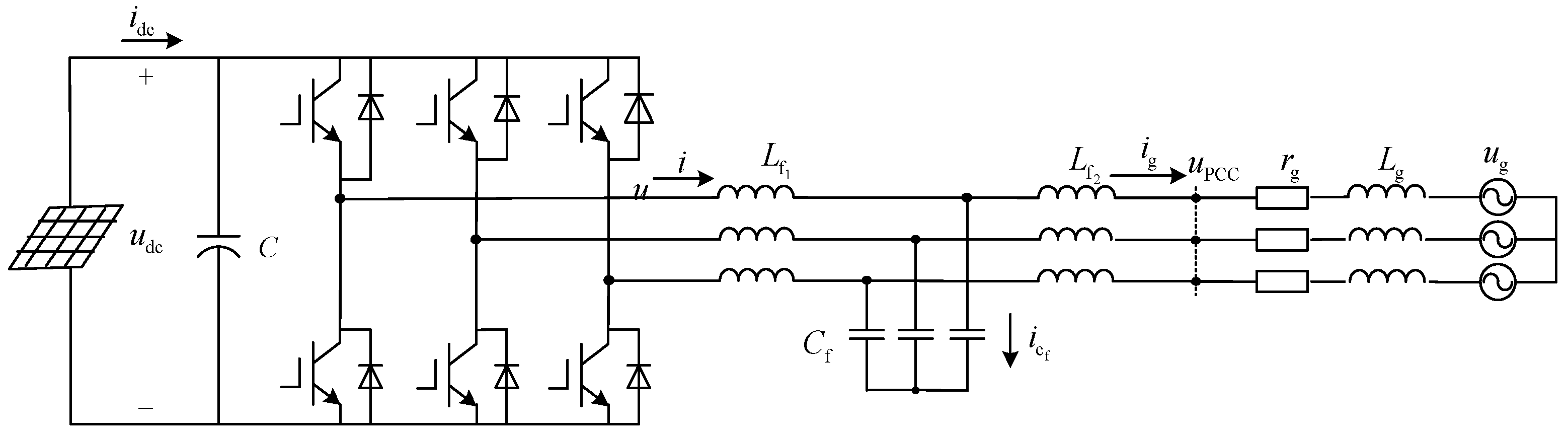
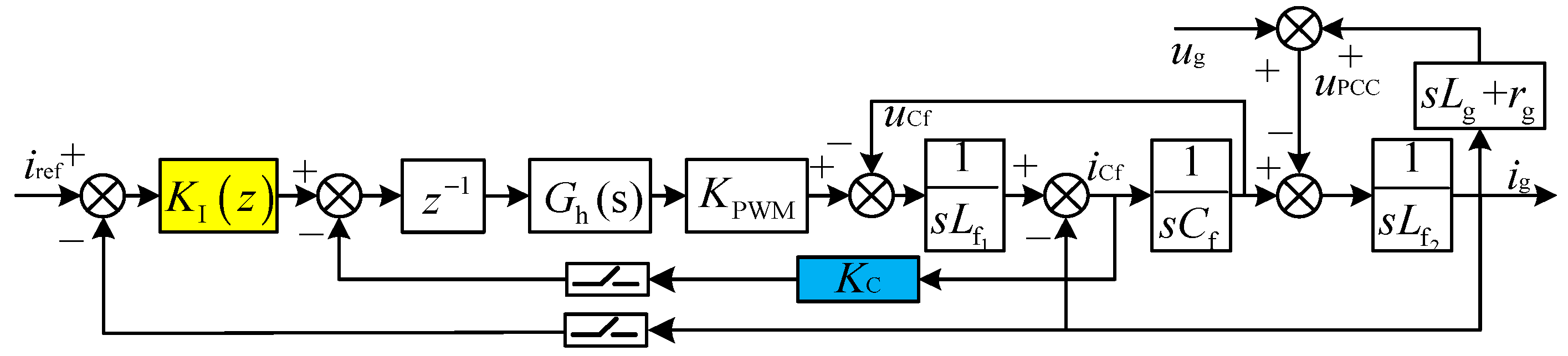
2.1. Modeling of the System
- (1)
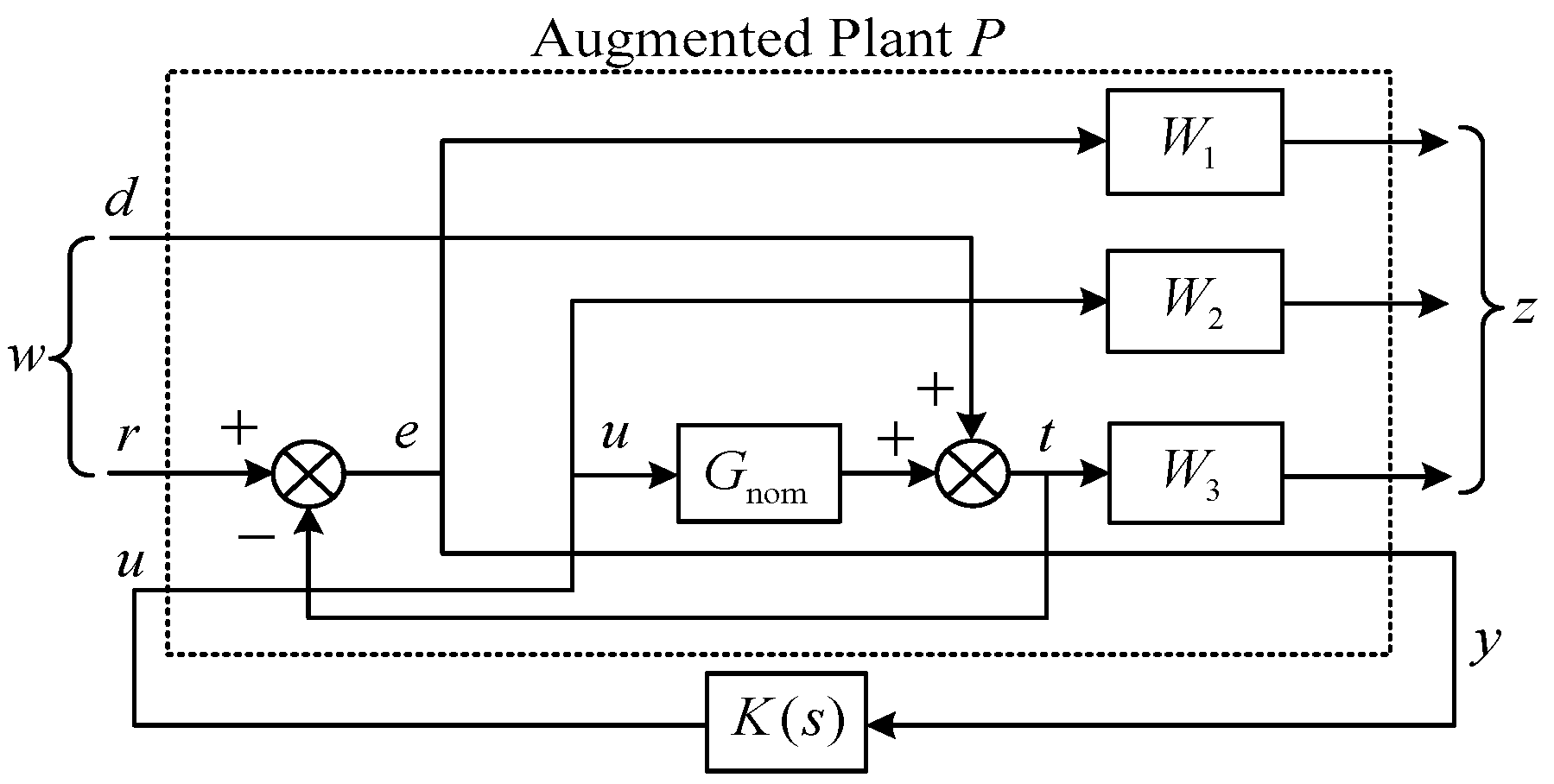
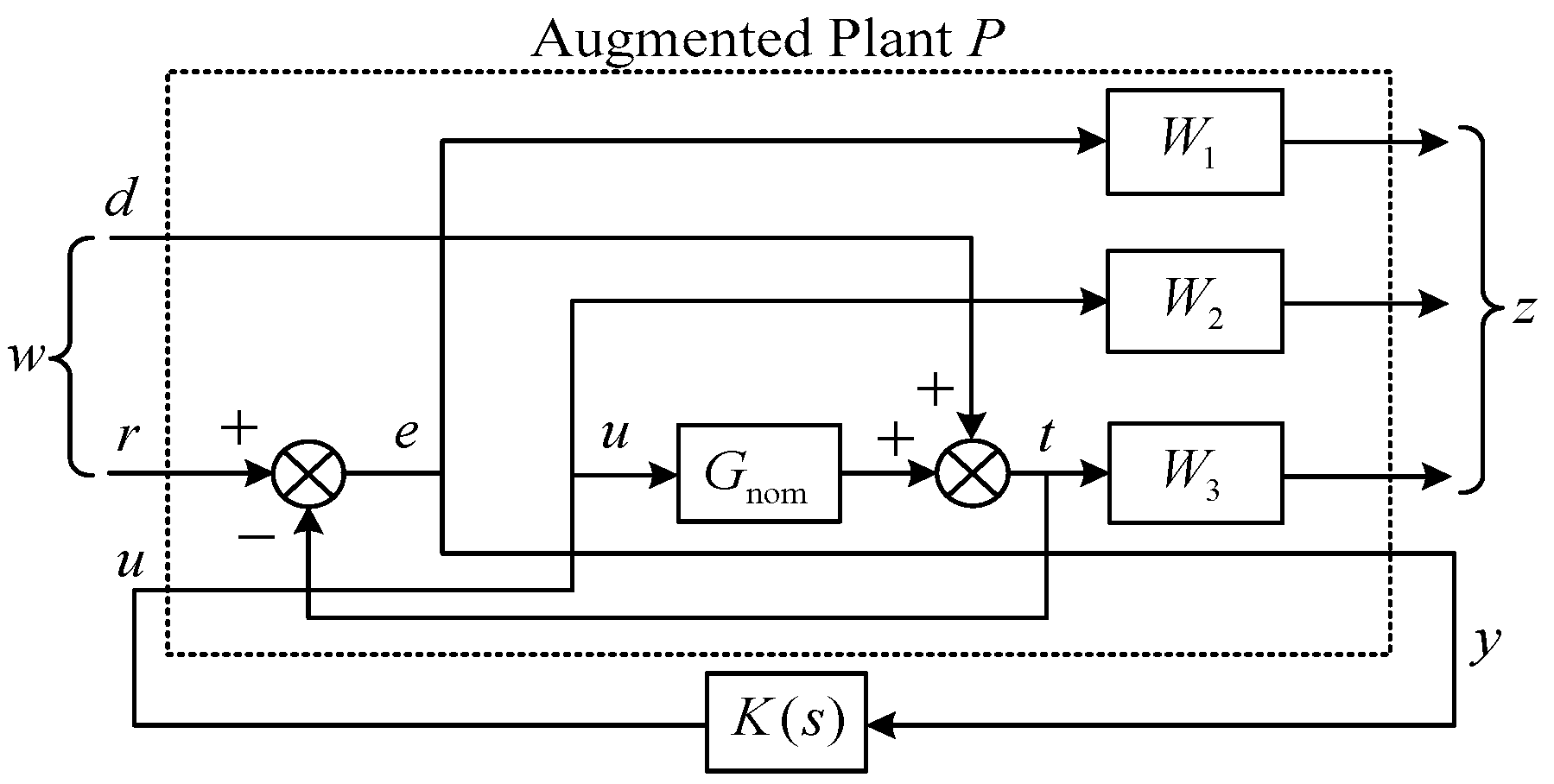
- z donates the output signals to be minimized (with respect to both performance and robustness) which are named evaluation signals.
- (2)
- y represents the vectors of measurement available to the controller K(s), such as measurement outputs or tracking errors. In this system, because the main purpose of GCI is to control the output current, y = e = [iref − ig iref − ig]T is adopted.
- (3)
- w denotes external inputs of this system, for example disturbances, noises, references etc. While building the generalized controlled object P, grid voltages and current references are treated as disturbances, where r = [iref iref]T denotes current references, d = [ug ug]T denotes grid voltages, and w = [iref iref ug ug]T.
- (4)
- u denotes the output signals of the controller or input control signals of the system, namely the inverter side voltage of GCI, u = [u u]T.
- (5)
- P represents the generalized controlled object, including the original controlled object Gnom with nominal values of grid impedance and weighting functions W1, W2, W3 to match the control requirements of the design.
2.2. Design Parameters and Constraint Conditions of the Proposed H∞ Robust Controller
- (A, B2) is stabilizable and (C2, A) detectable;
- and , where m and p denote the rank of these unit matrices;
- has full column rank for all;
- has full row rank for all.
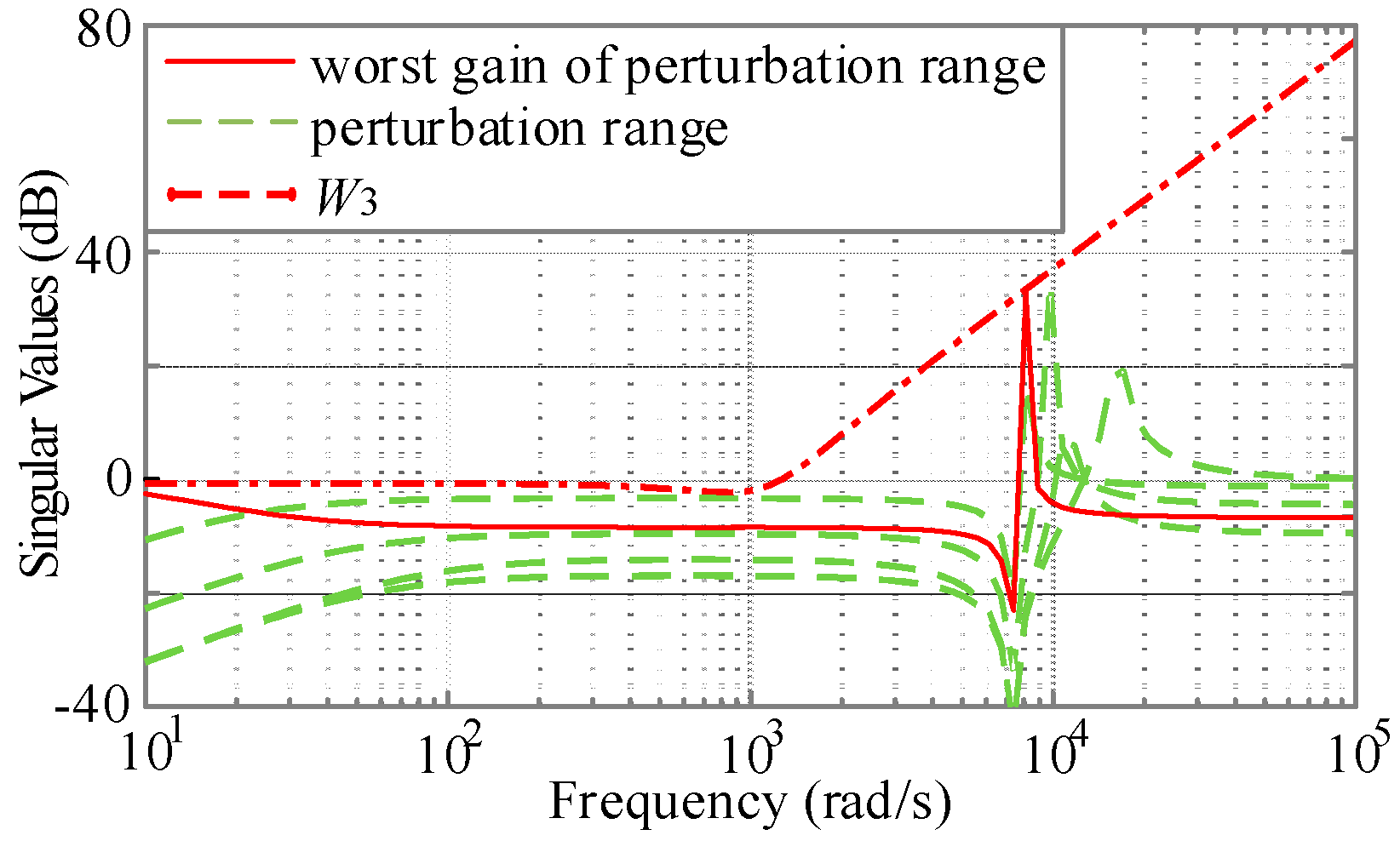
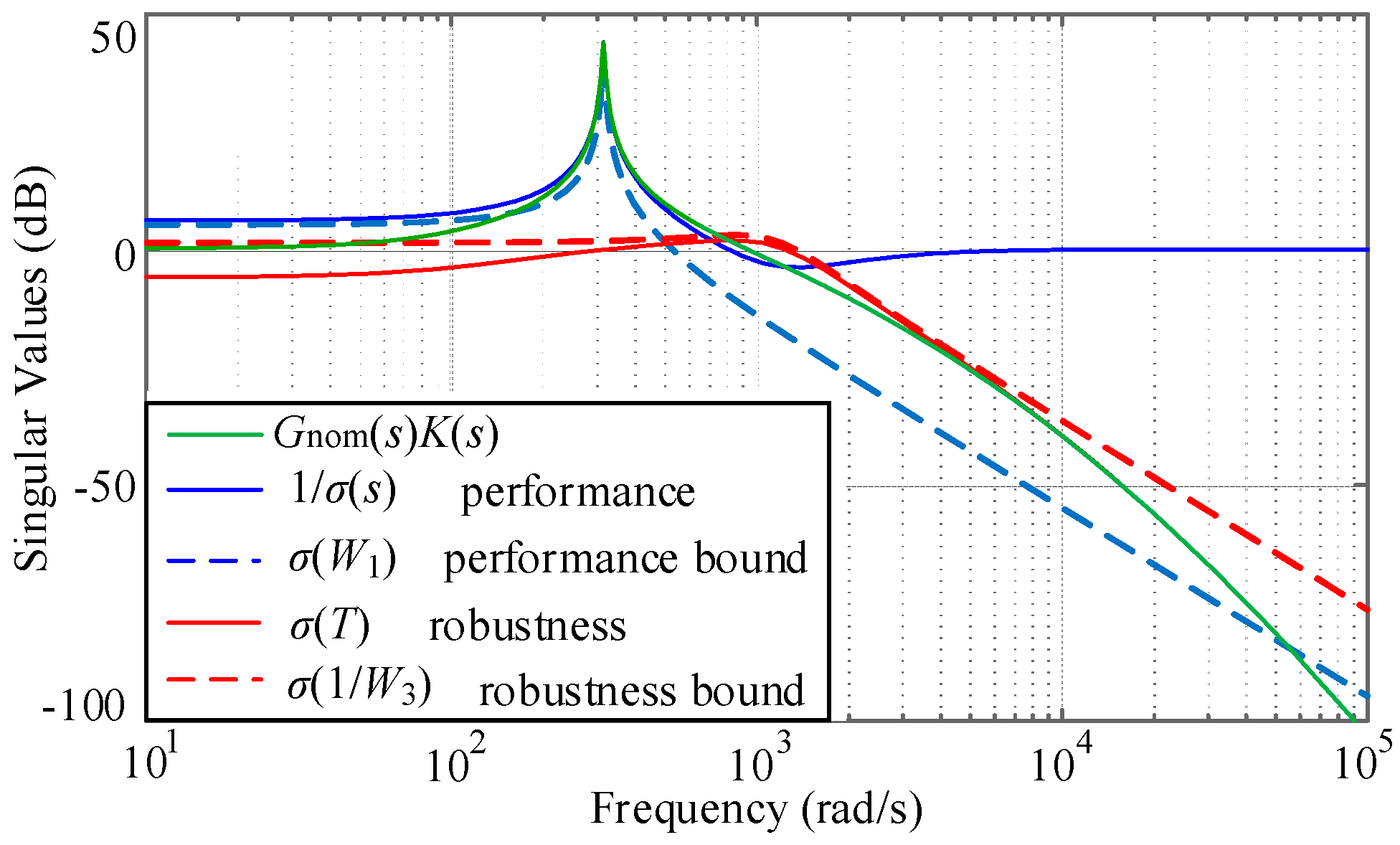
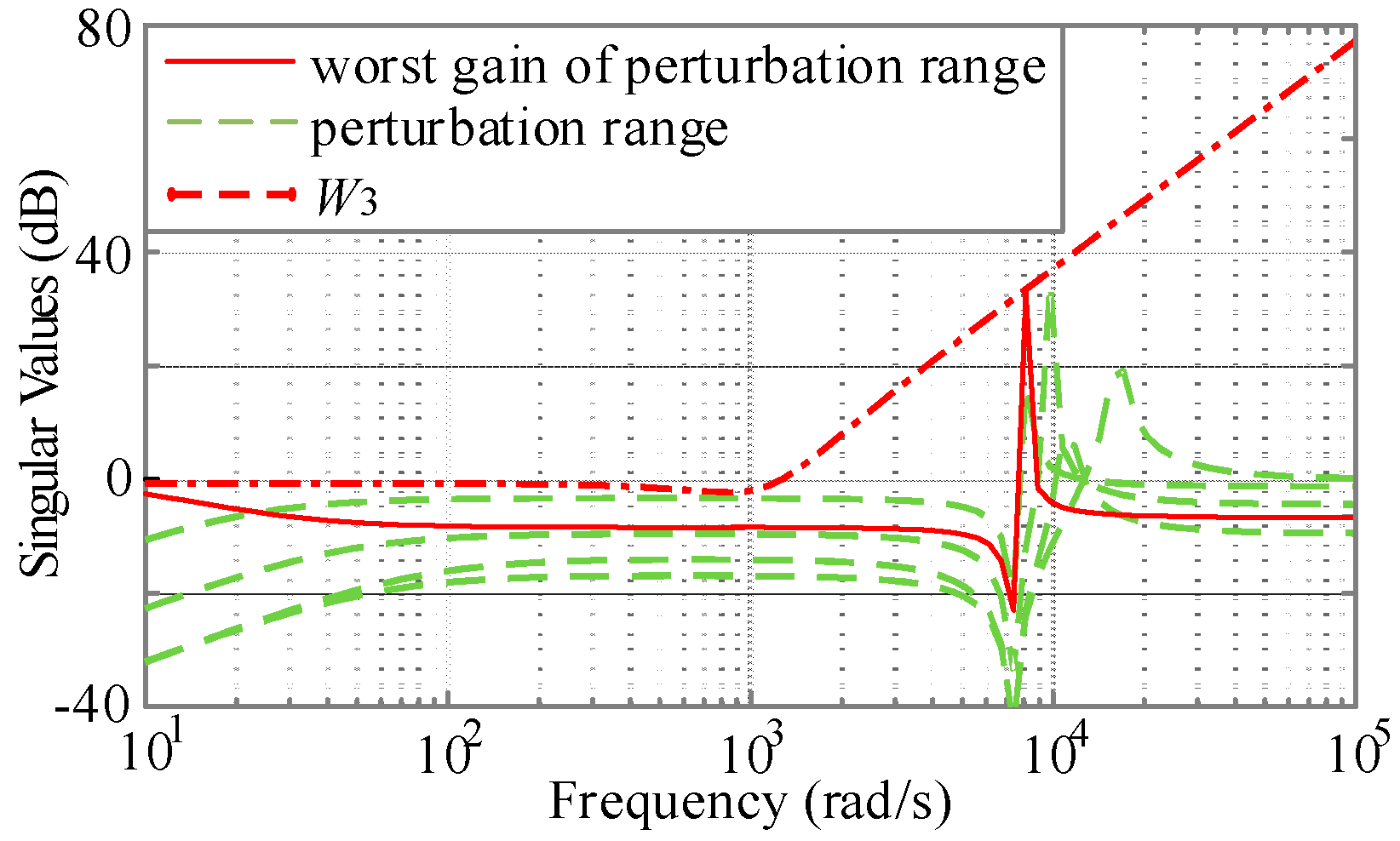
2.3. Design of Weighting Functions
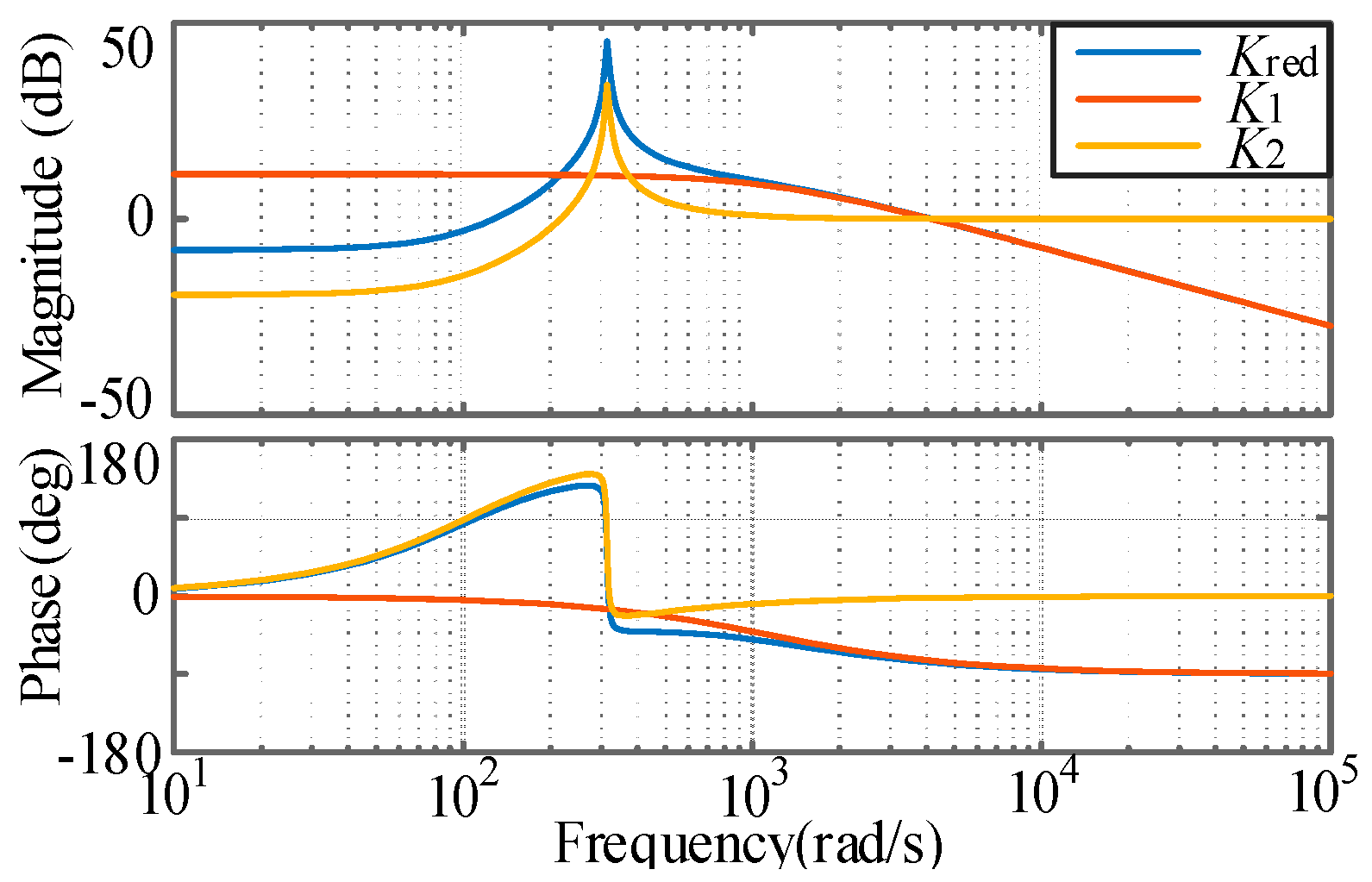
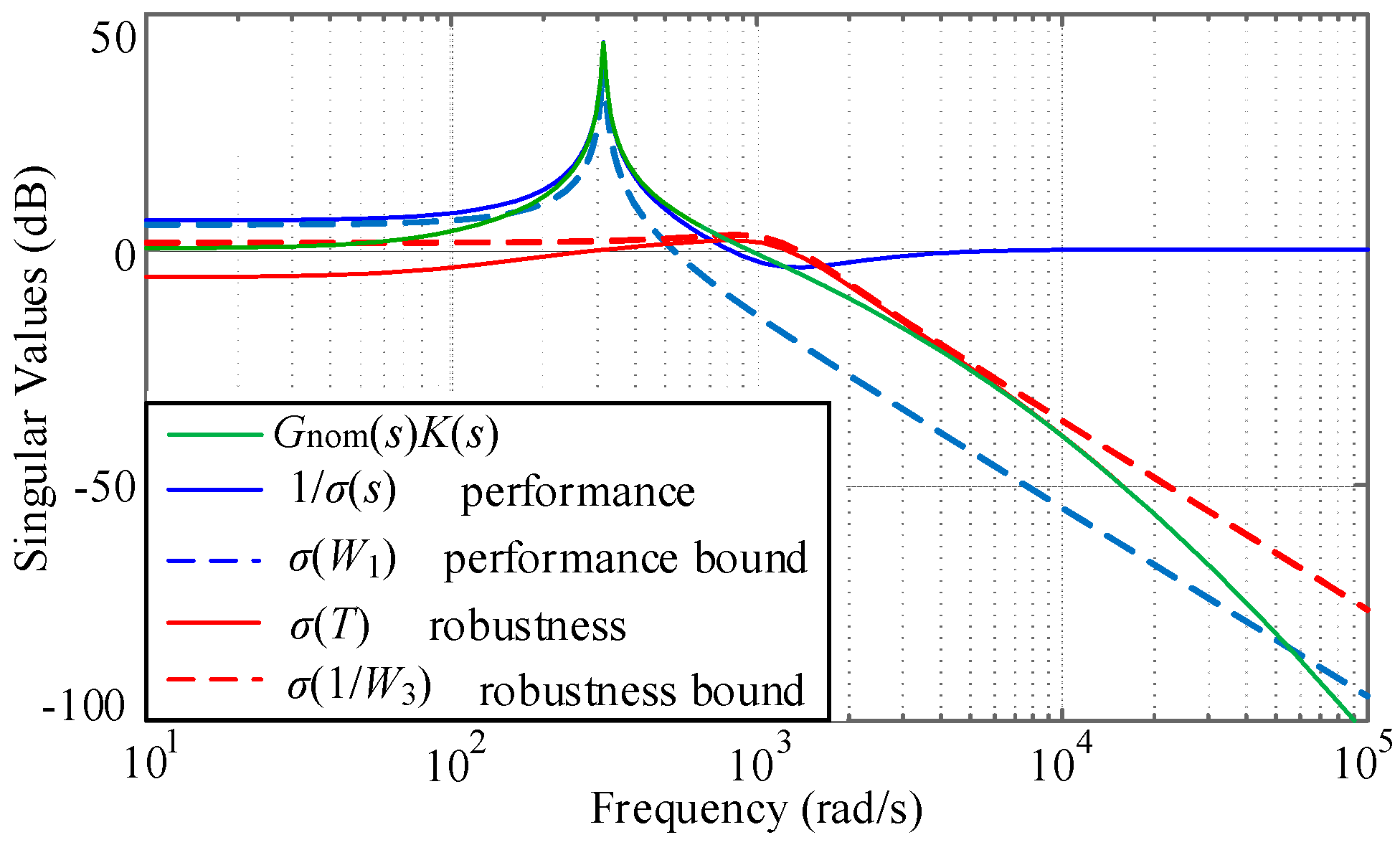
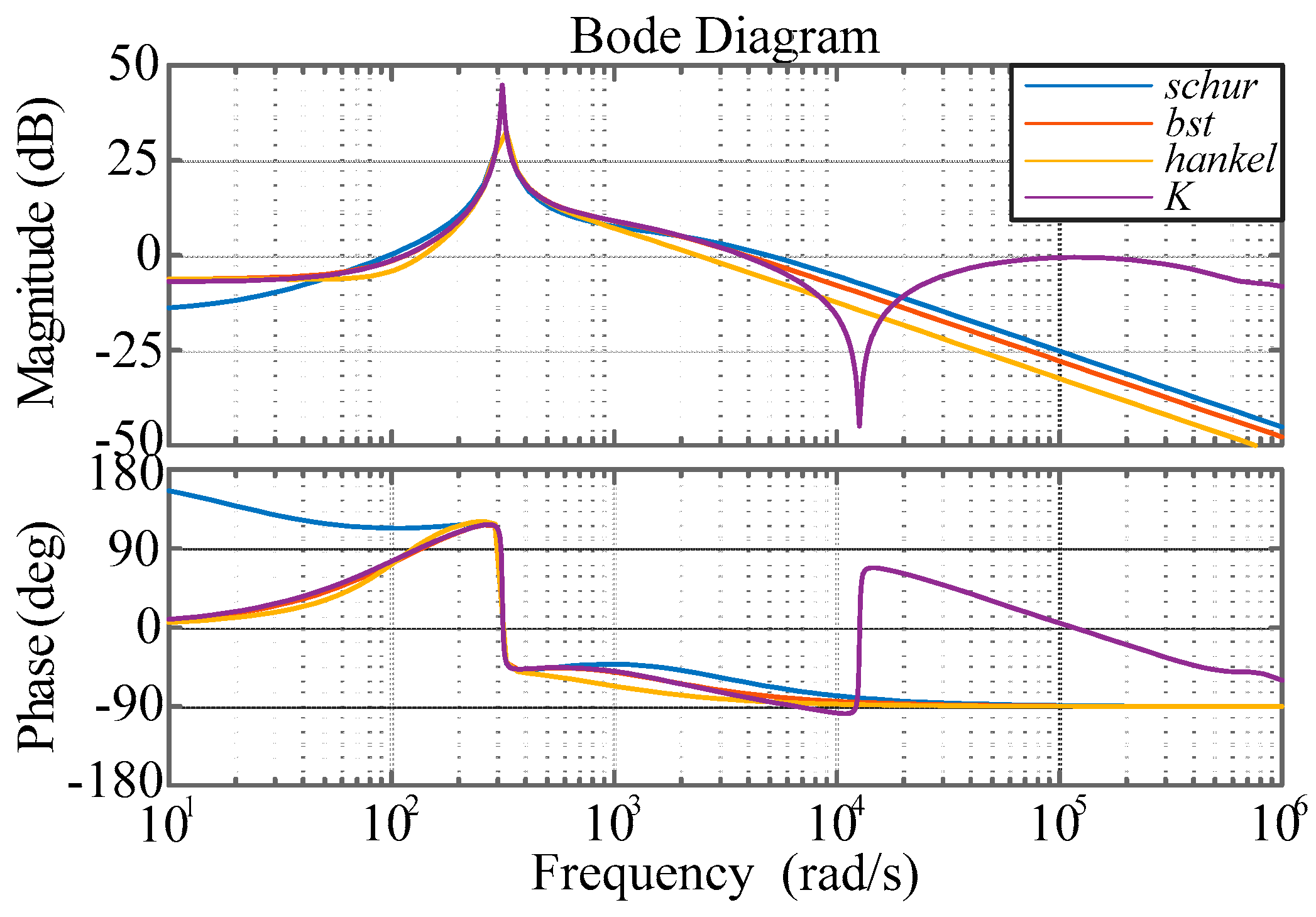
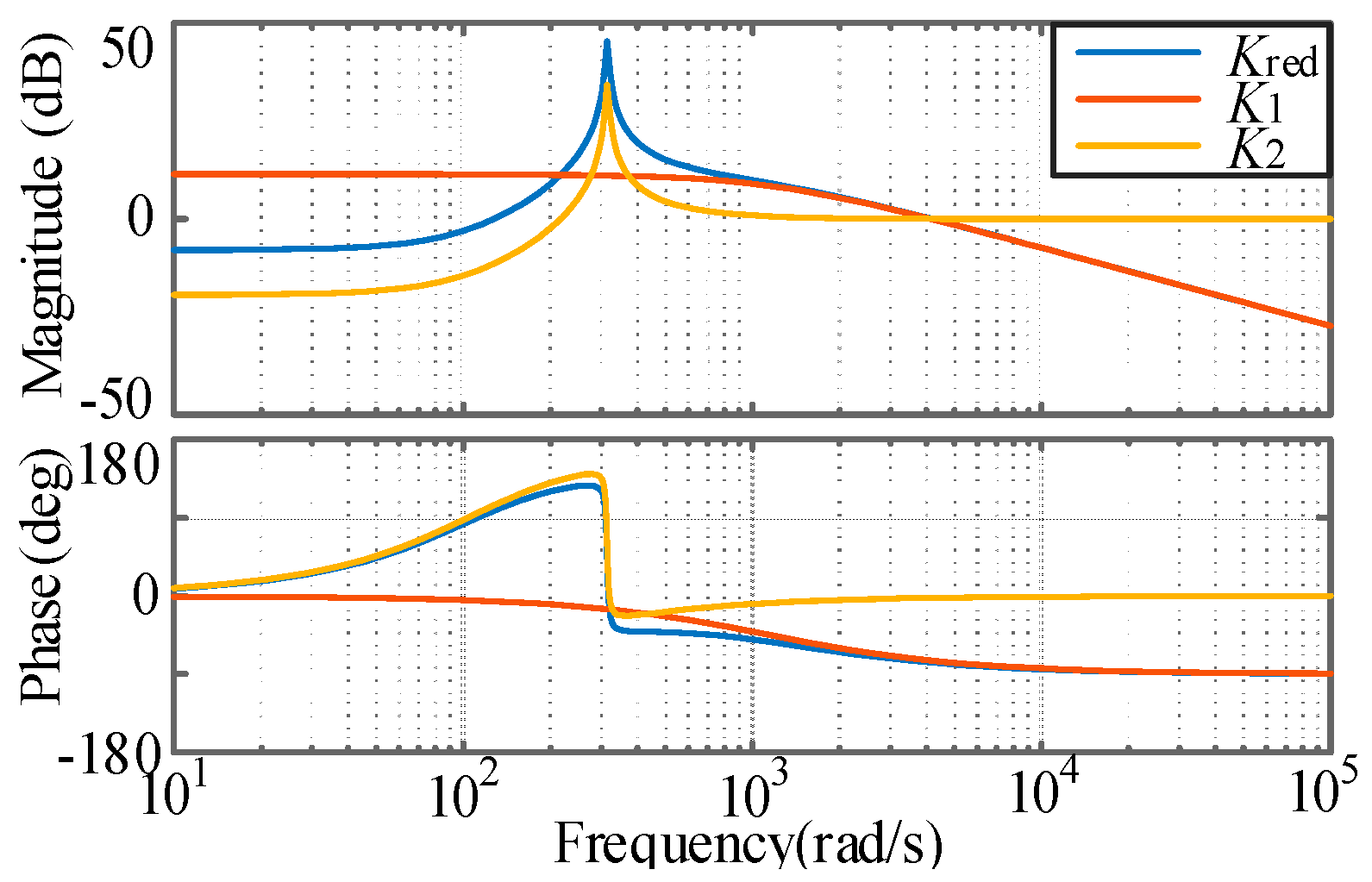
2.4. Synthesis and Analysis of the H∞ Robust Controller
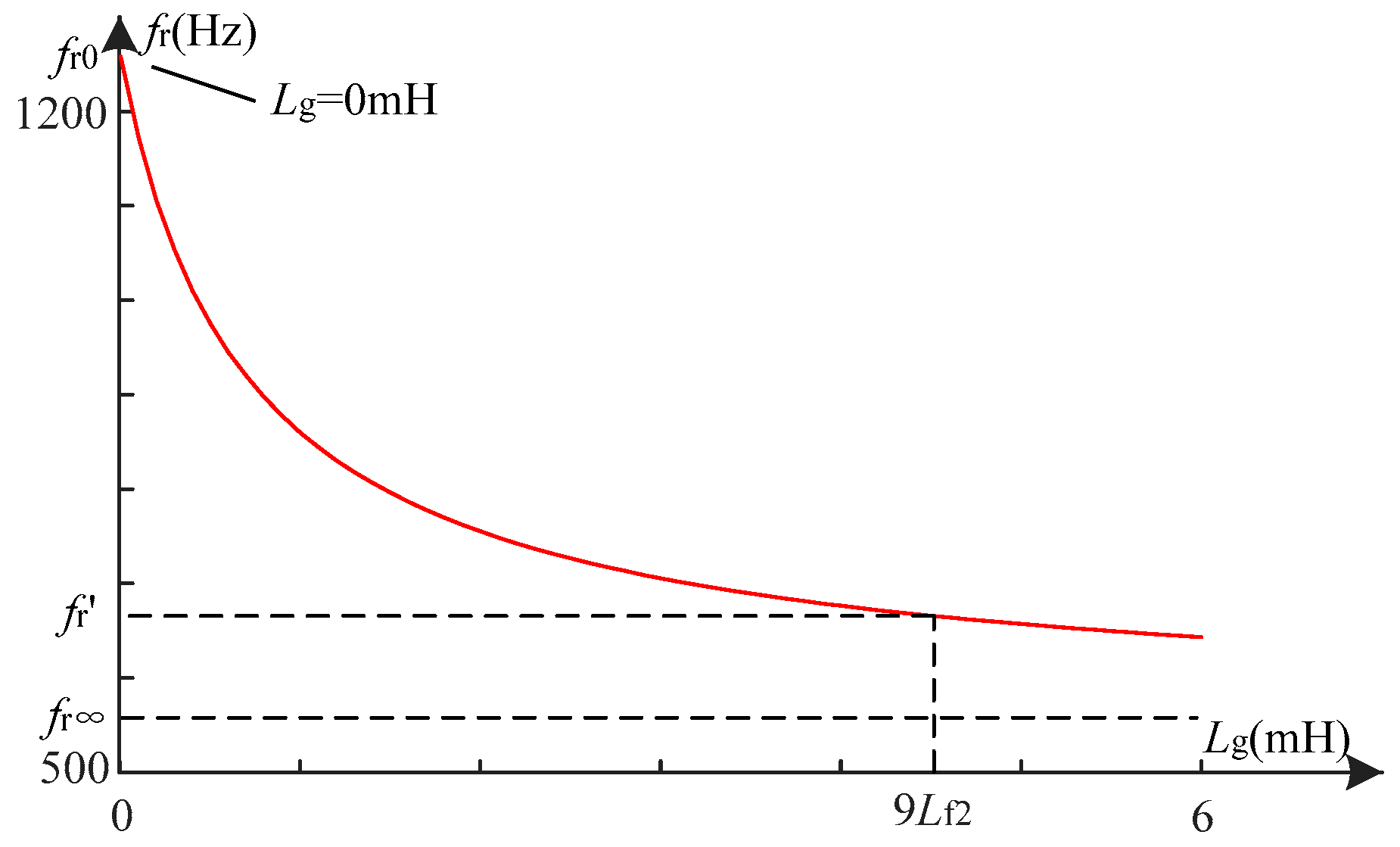
3. Stability Analysis of Proposed H∞ Robust Control and Traditional Control Strategy
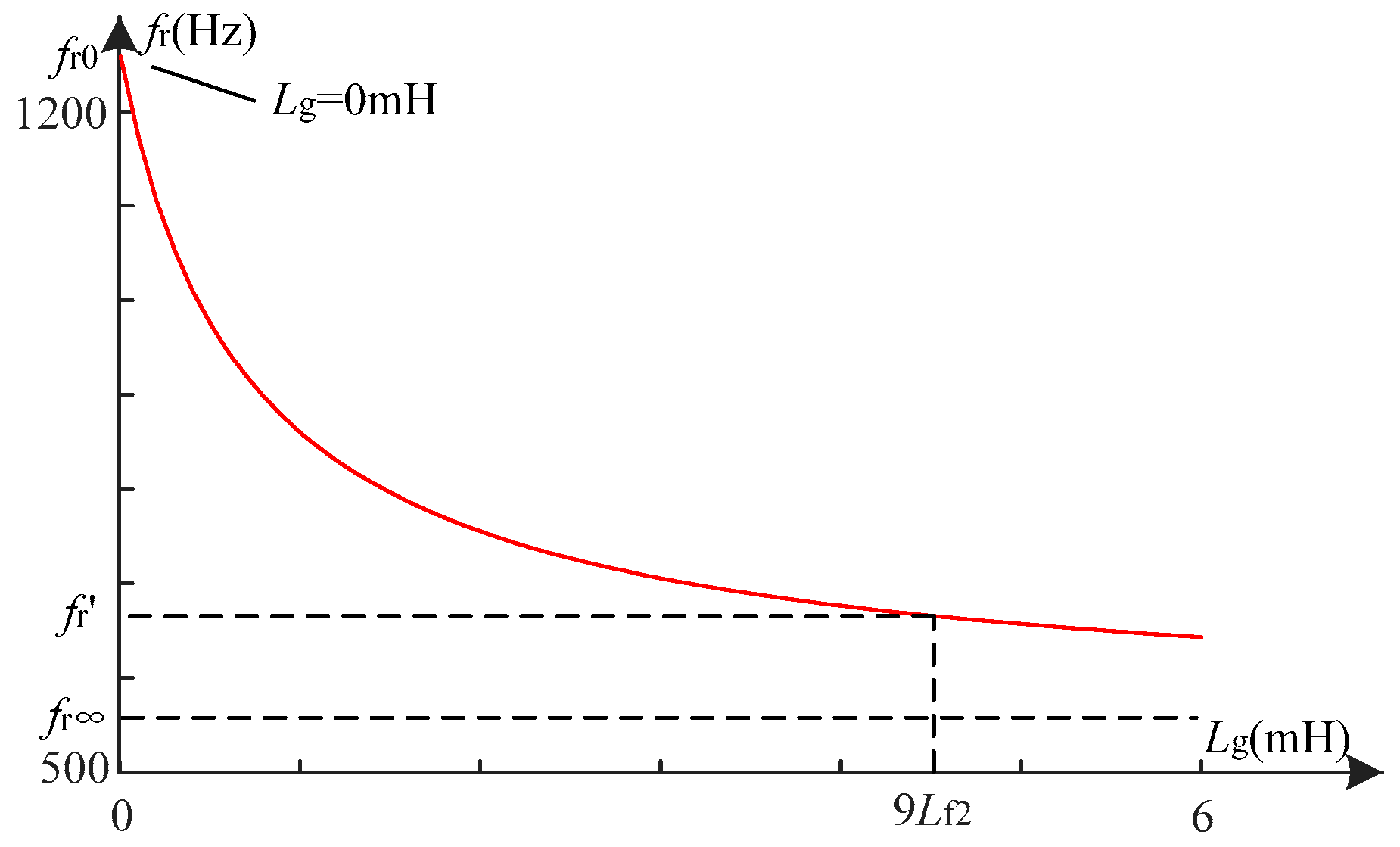
3.1. Control Frame of LCL-Type Grid-Connected Inverter on Large-Scale Grid Impedance Perturbation
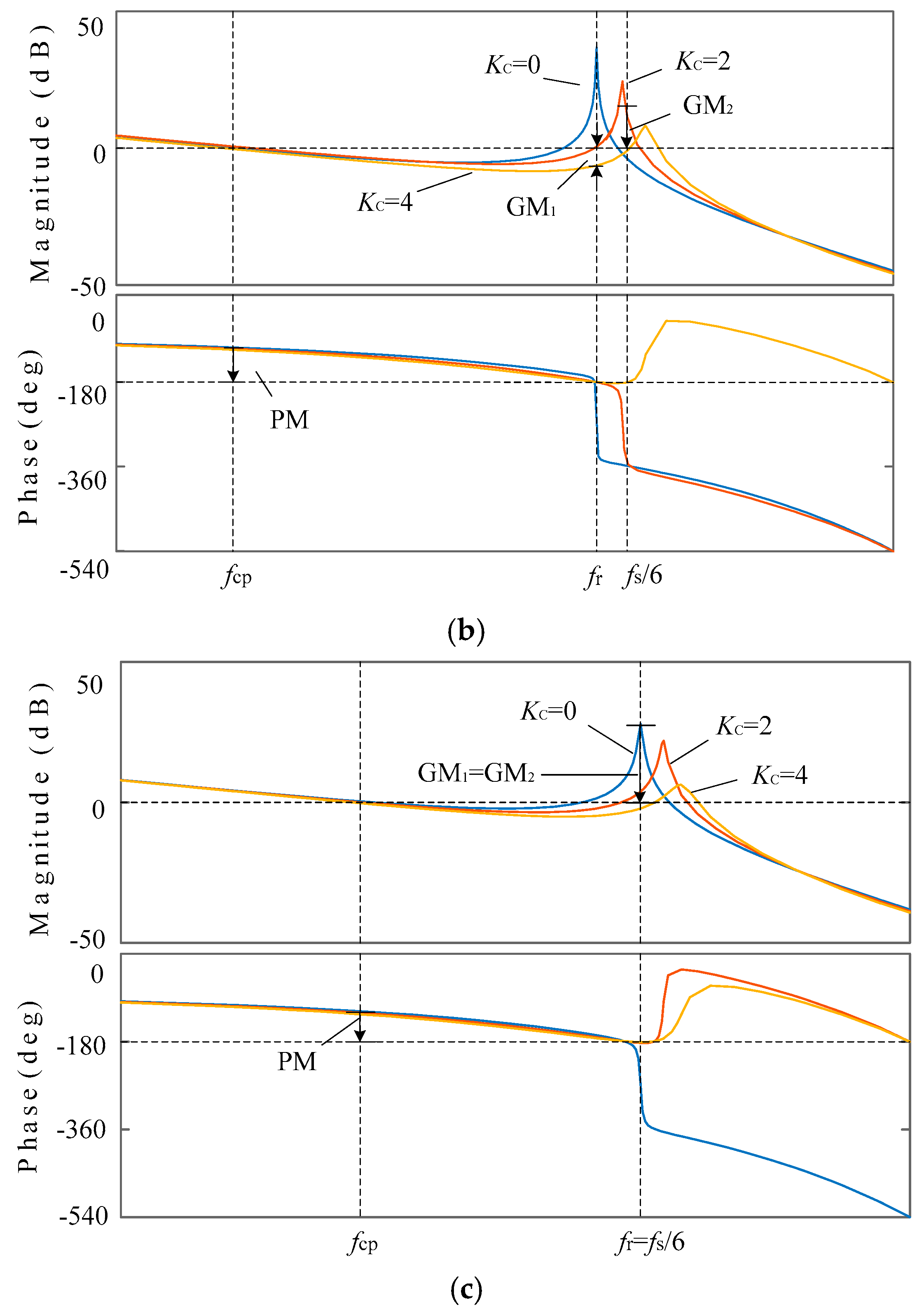
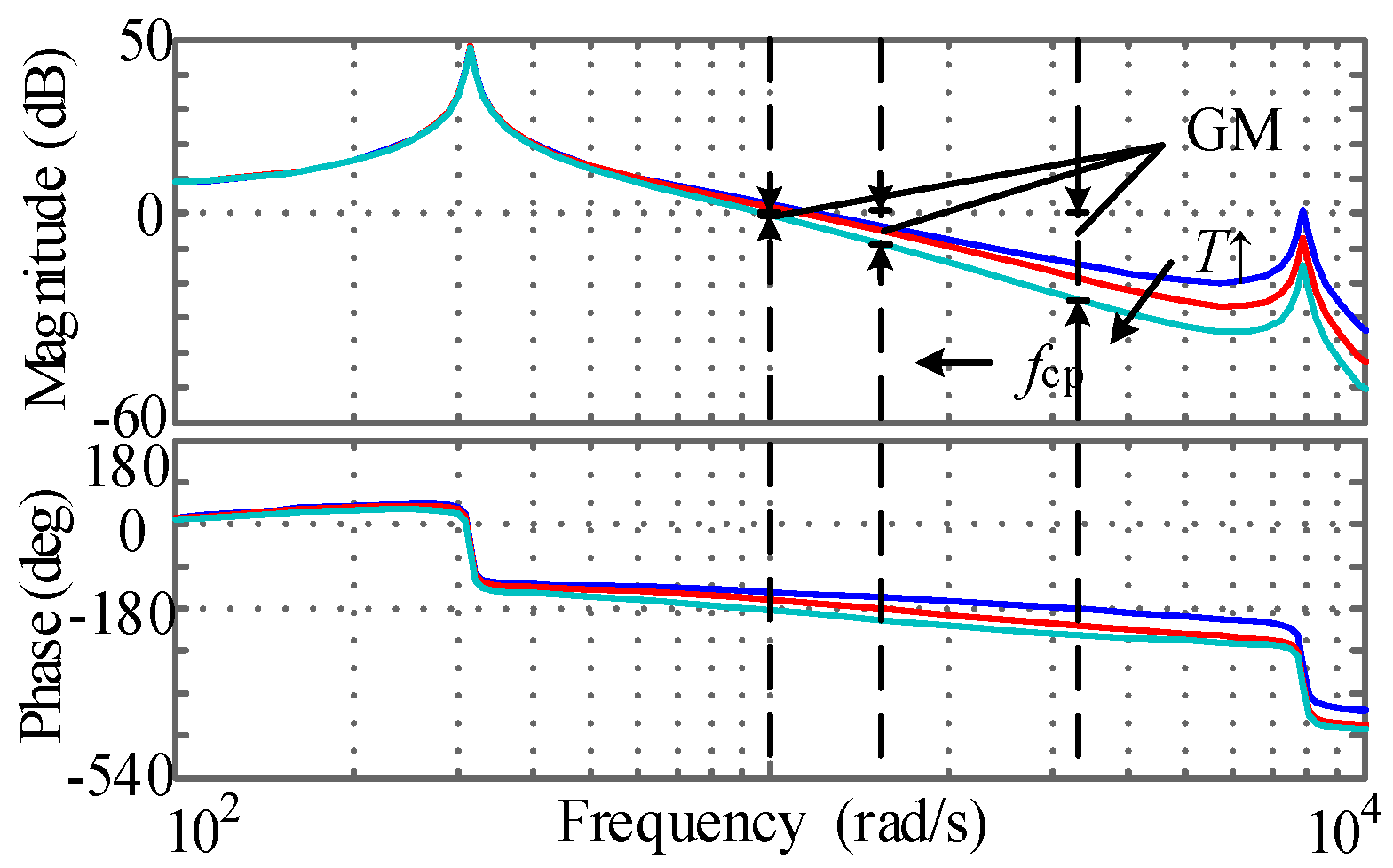
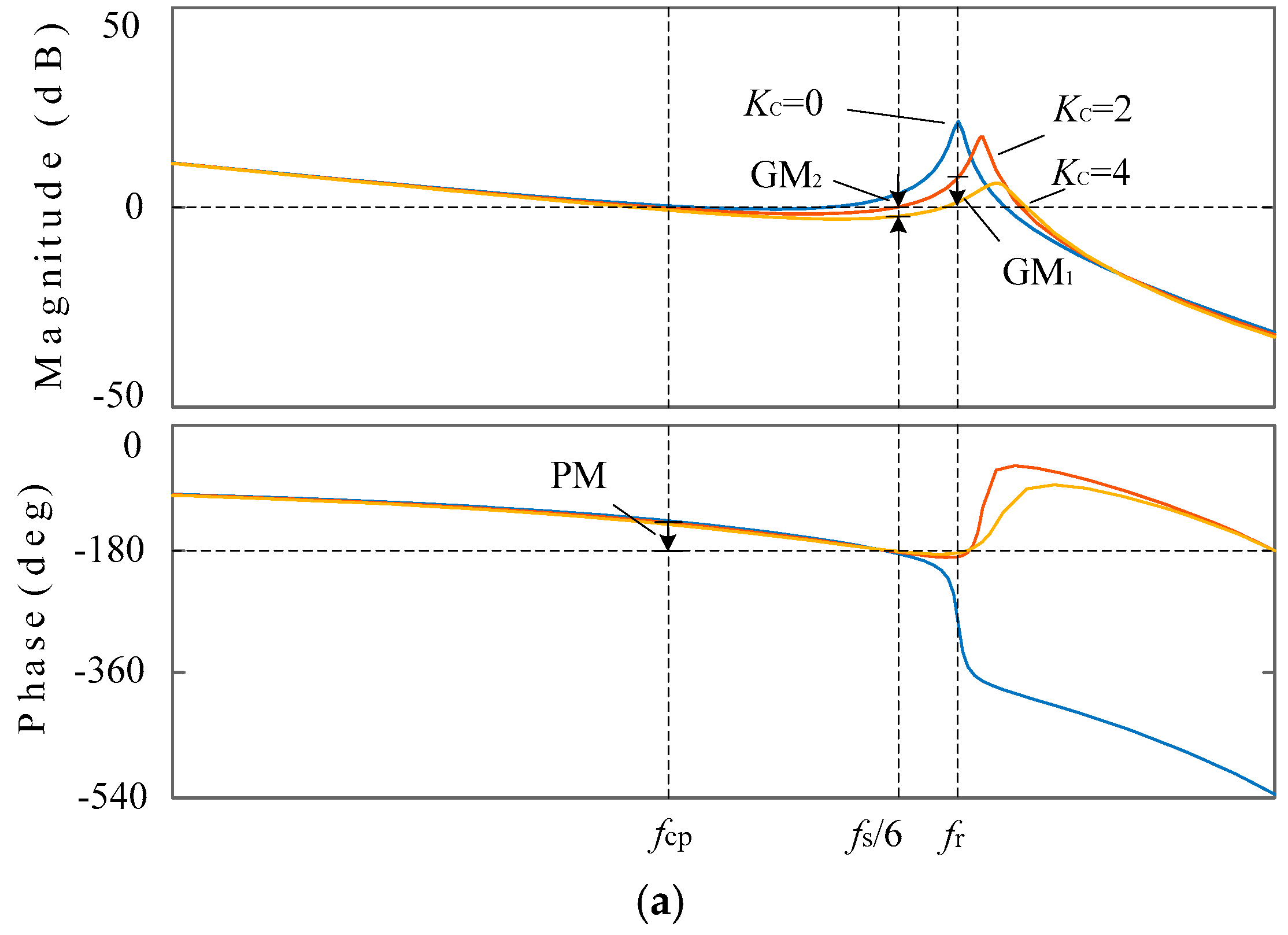
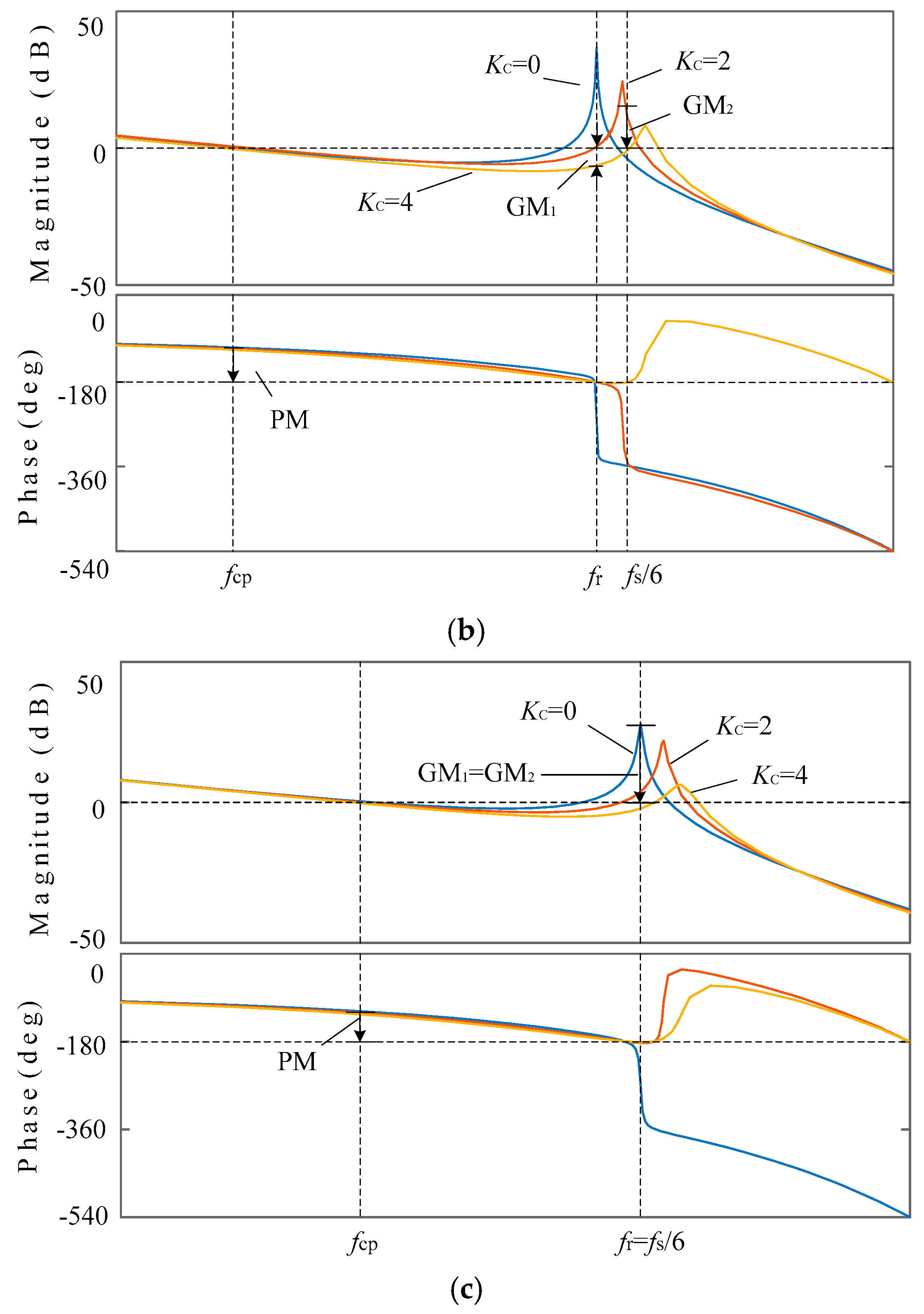
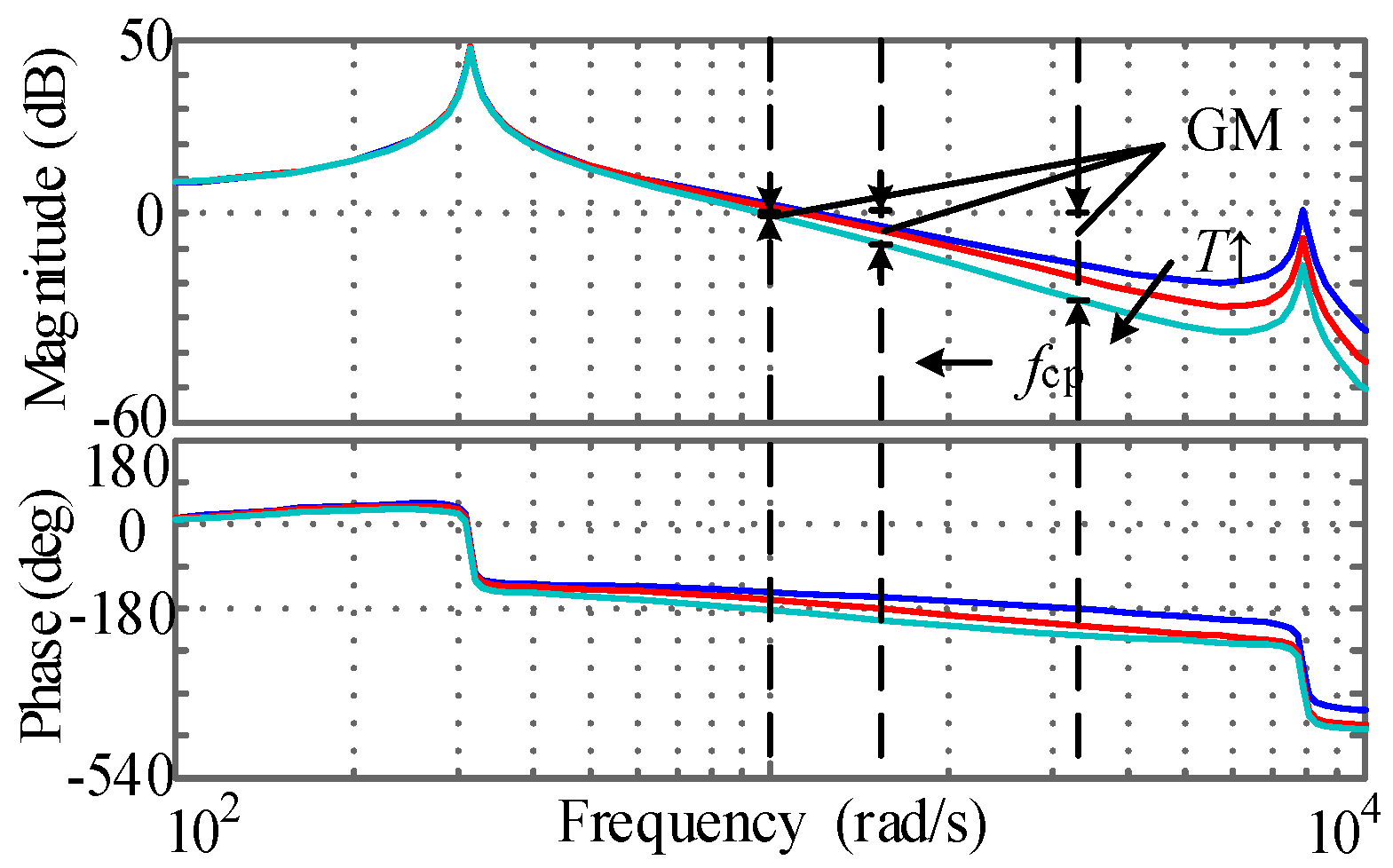
3.2. Stability Analysis under Traditional Control Strategy
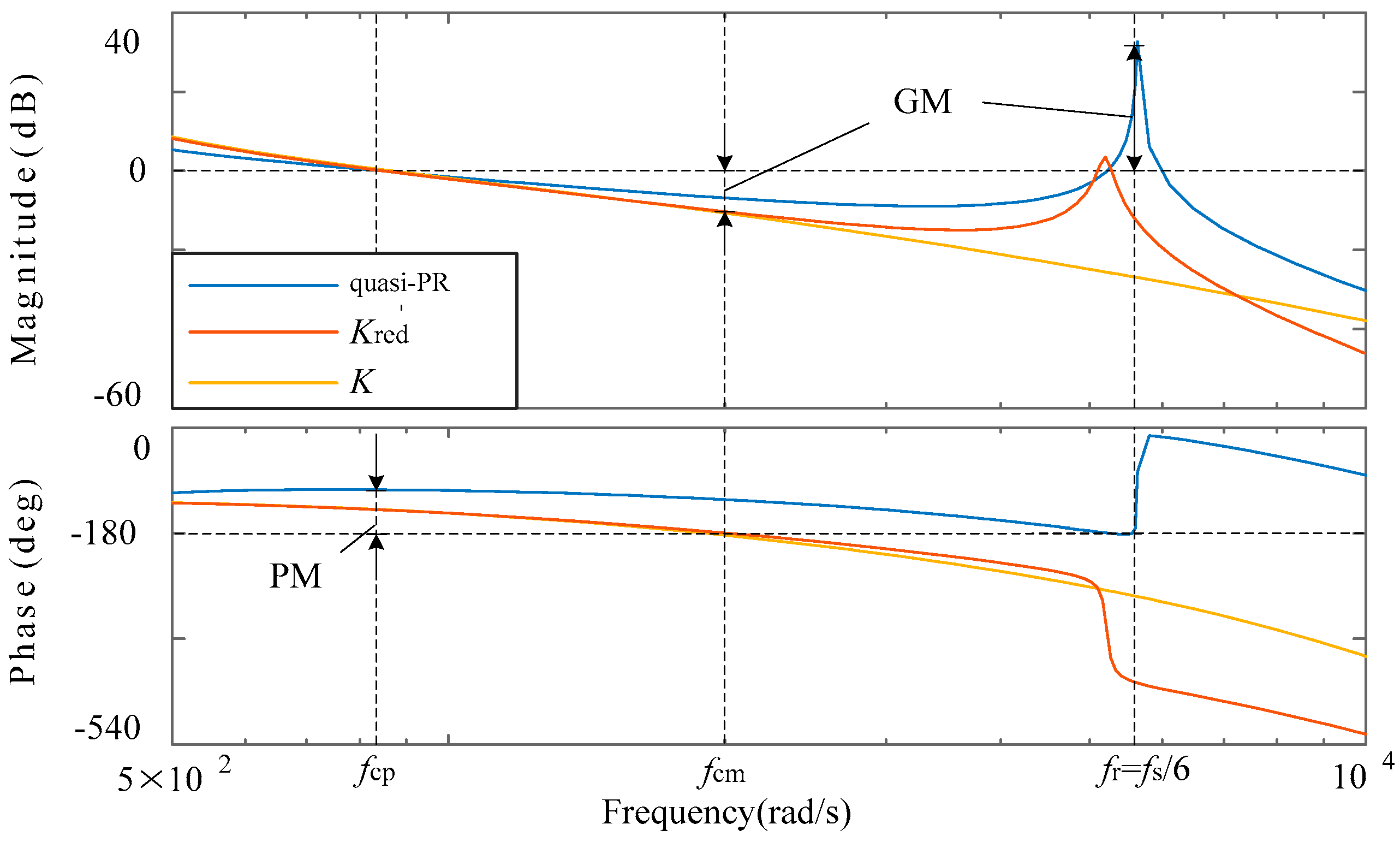
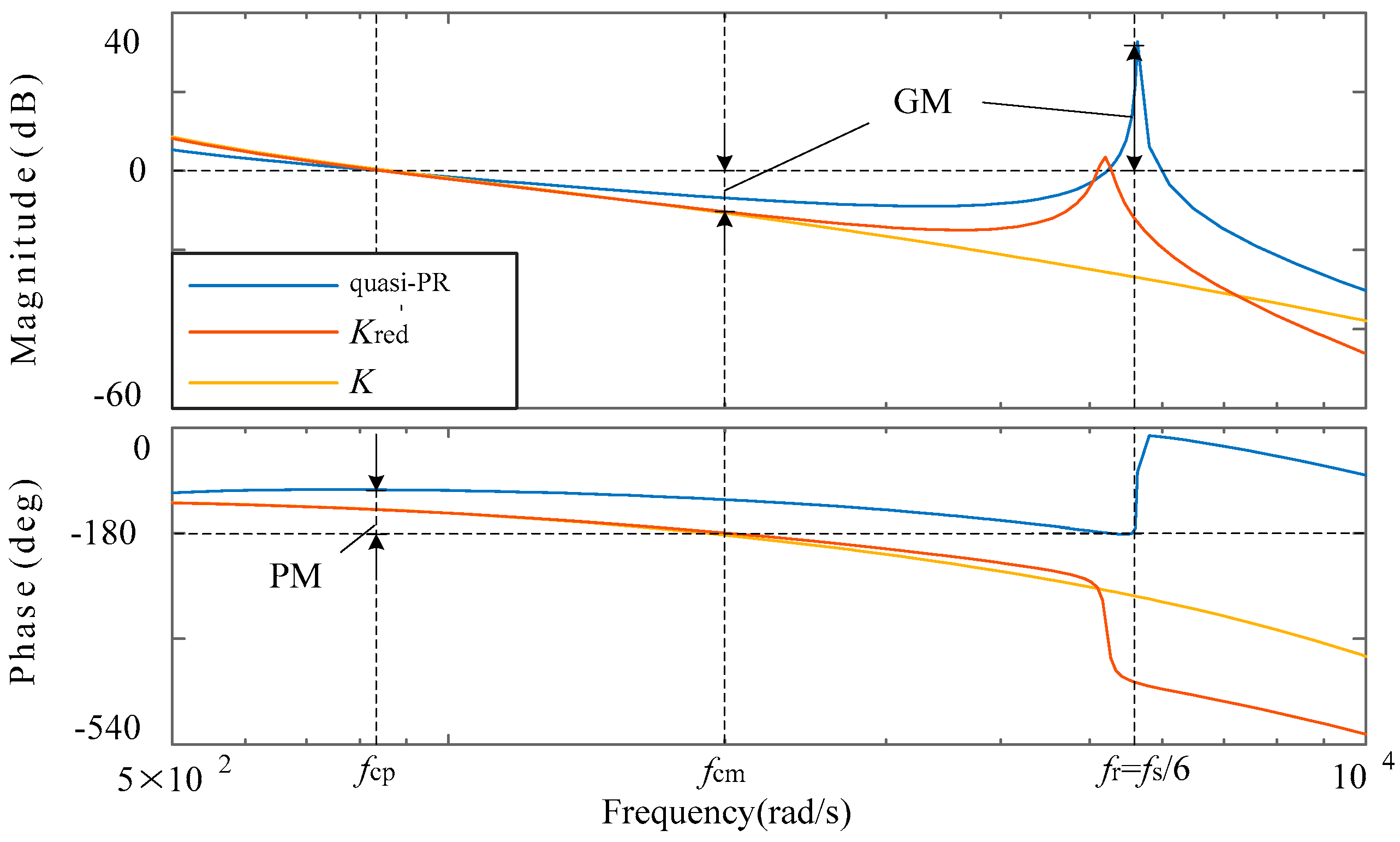
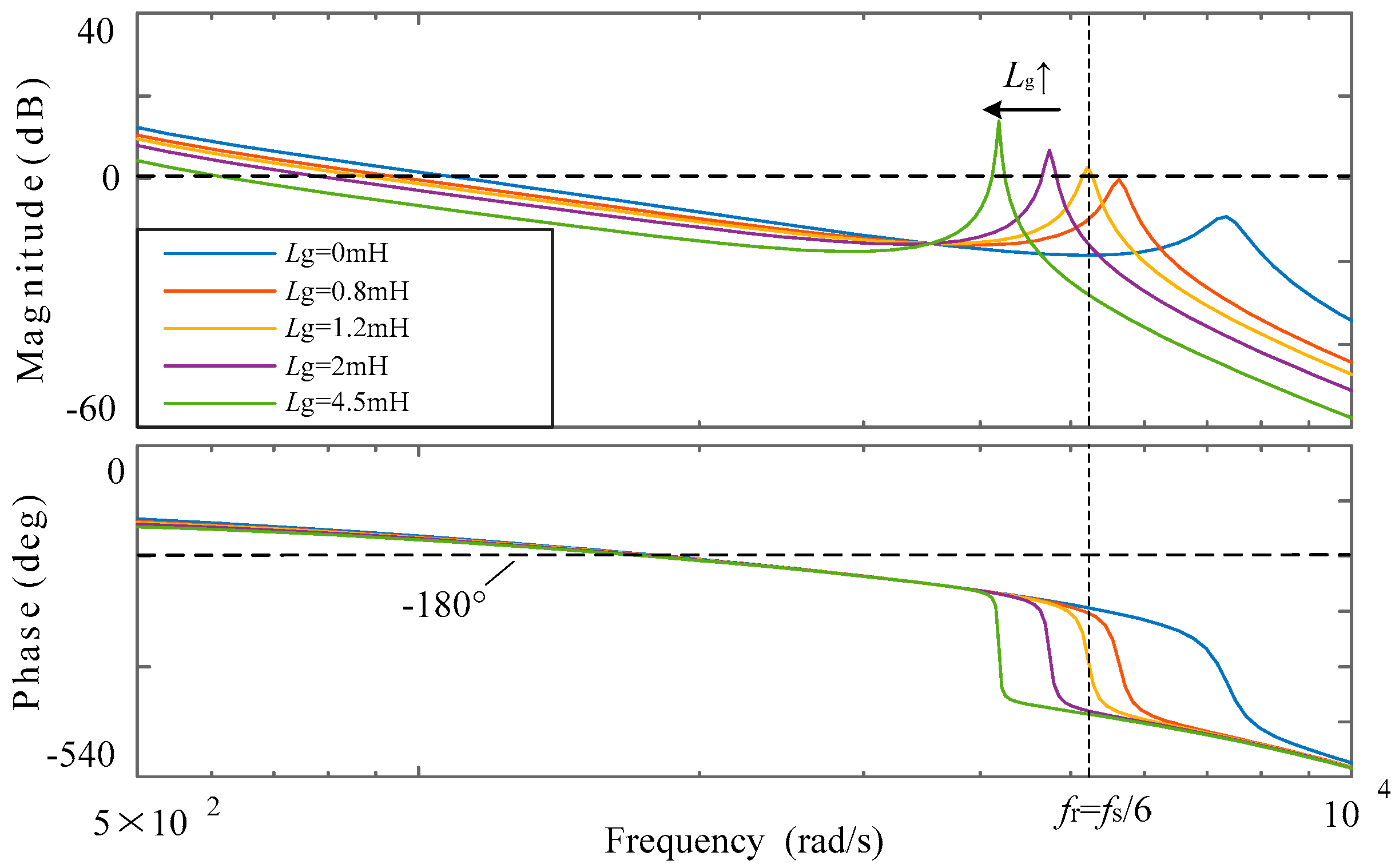
3.3. Stability Analysis under Proposed H∞ Robust Control Strategy
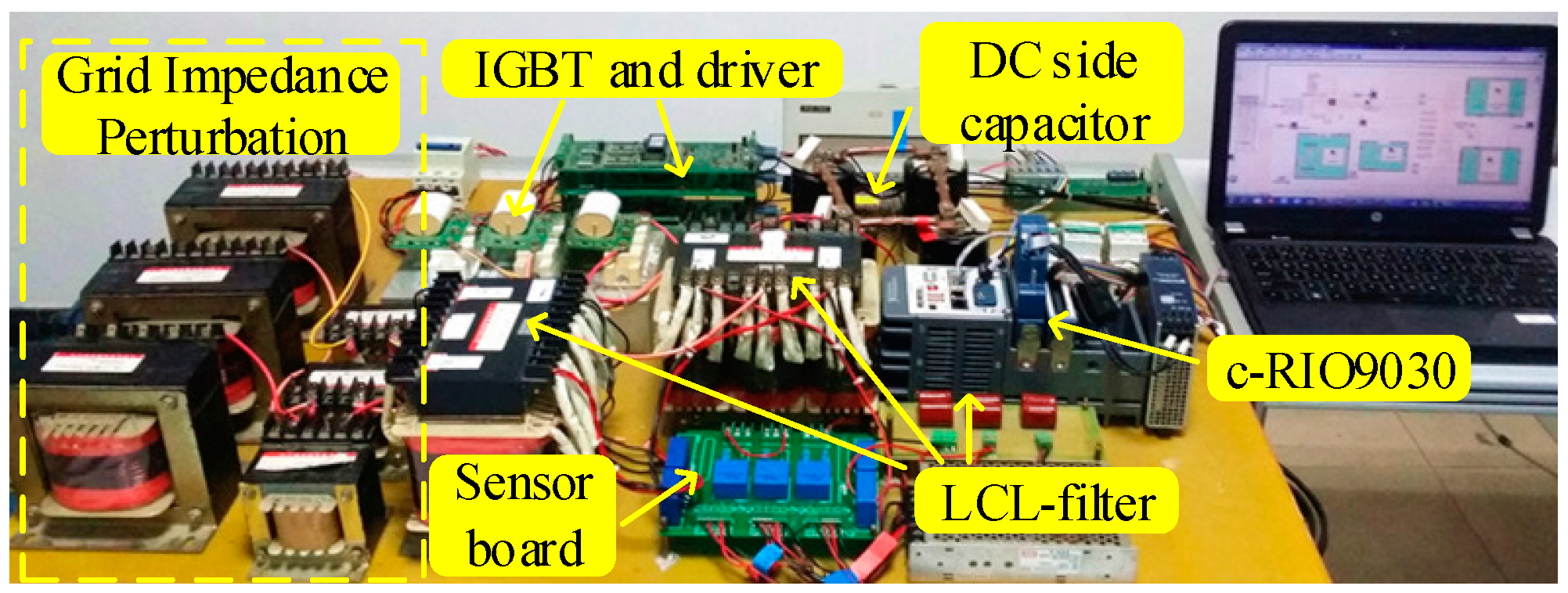
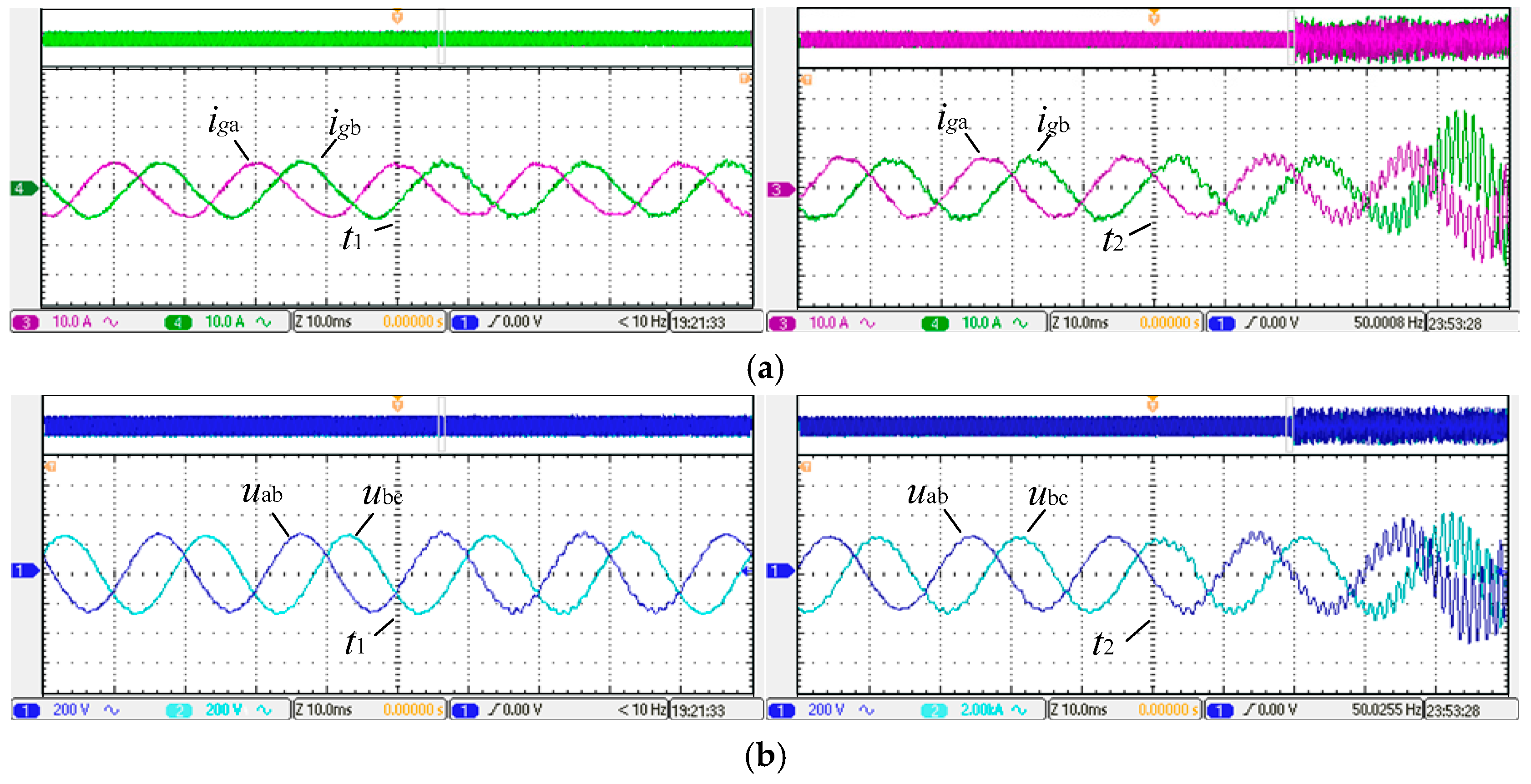
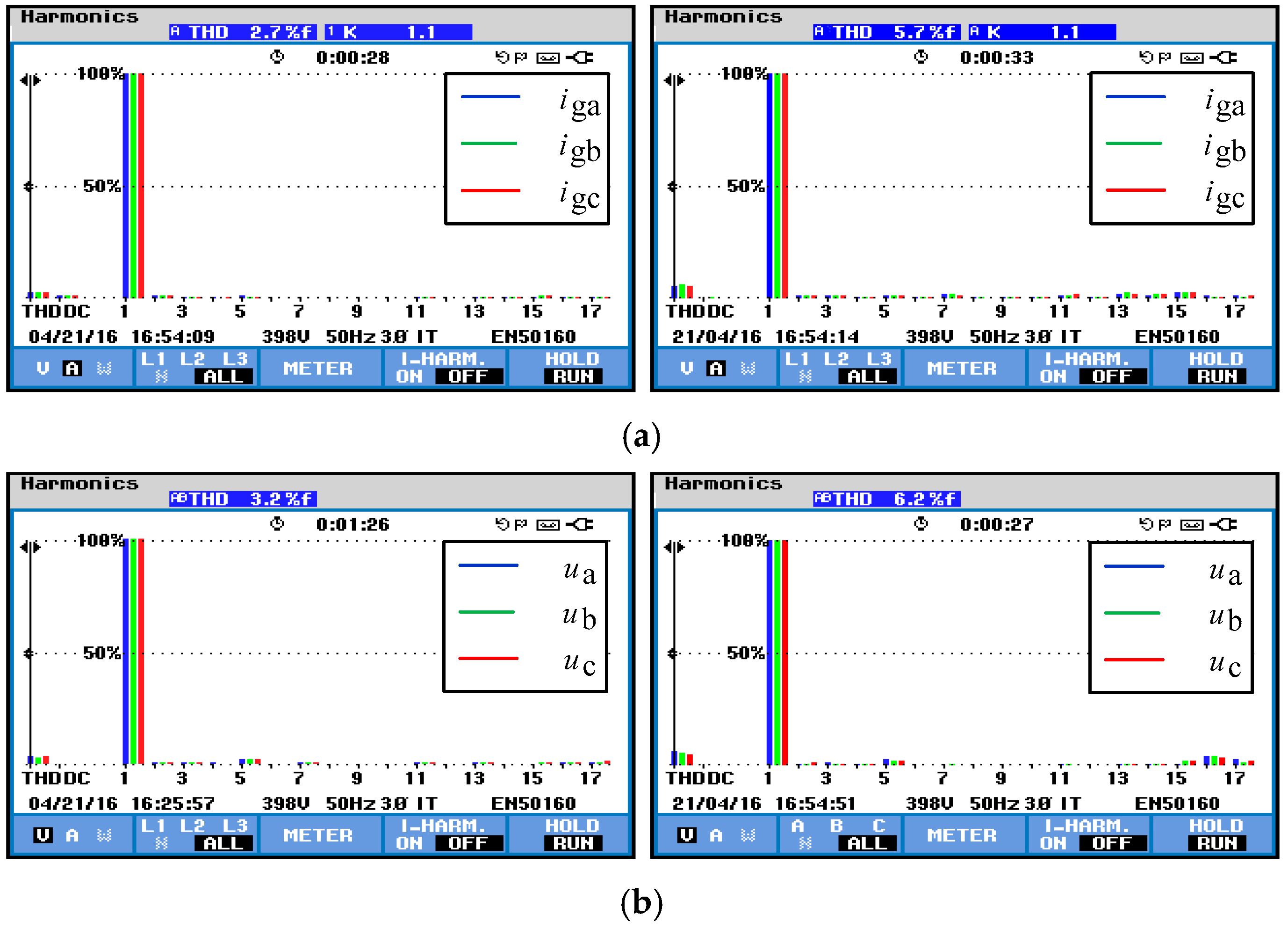
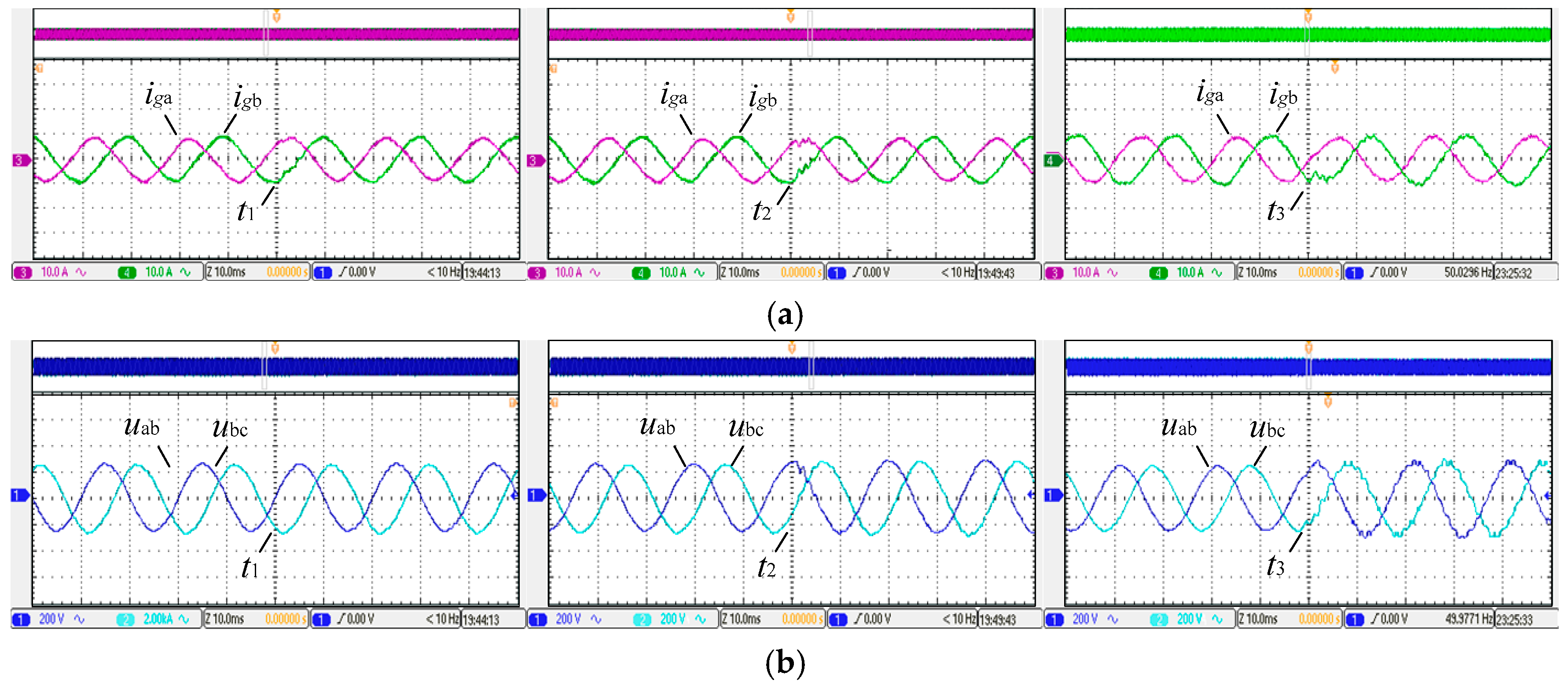
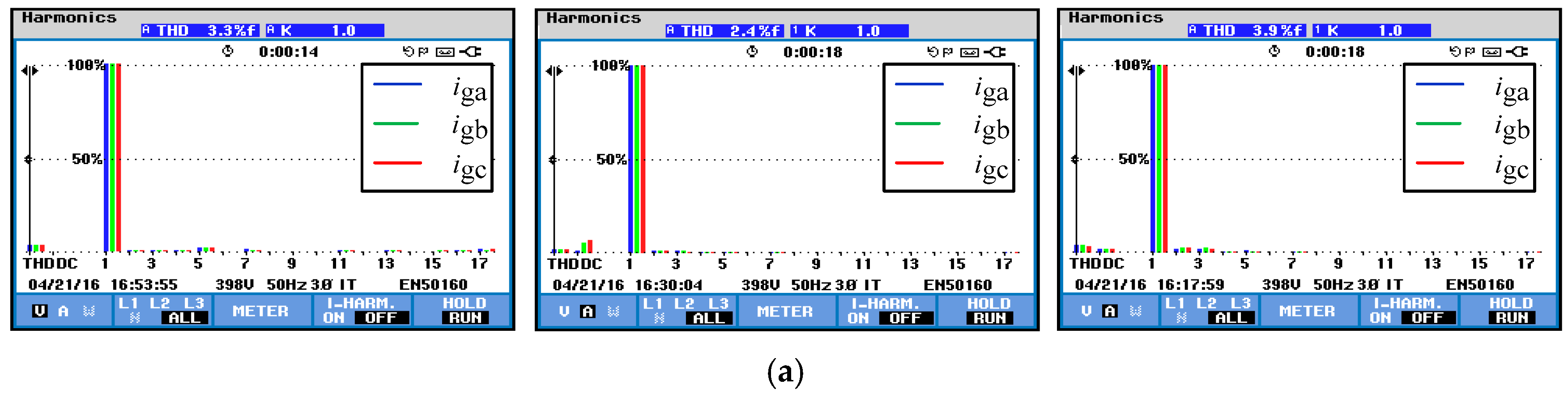
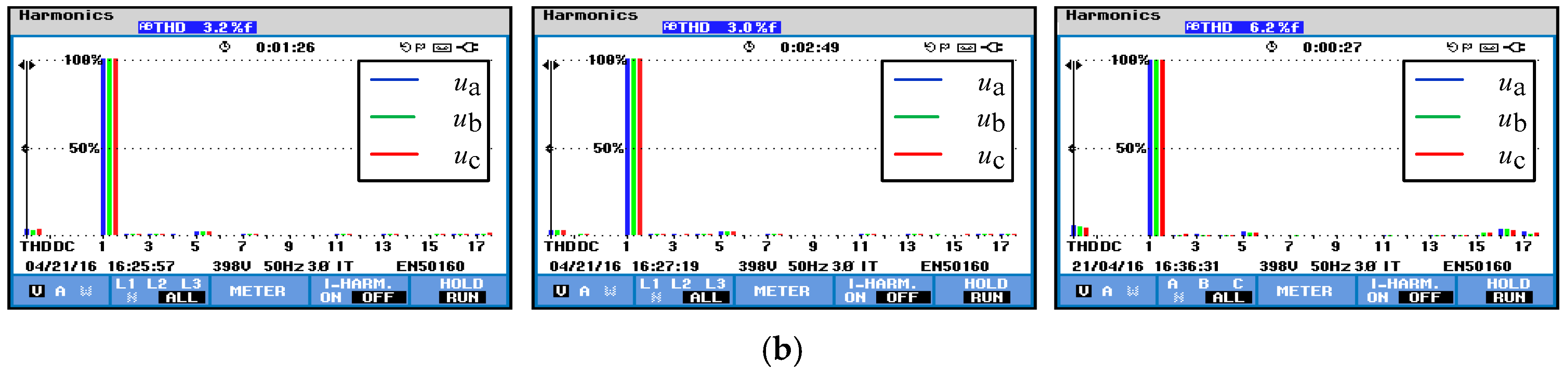
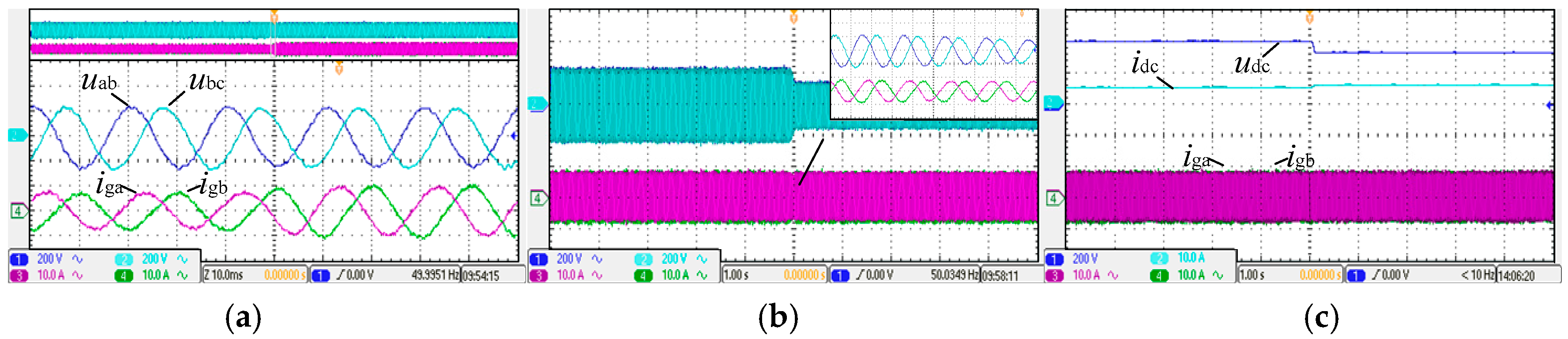
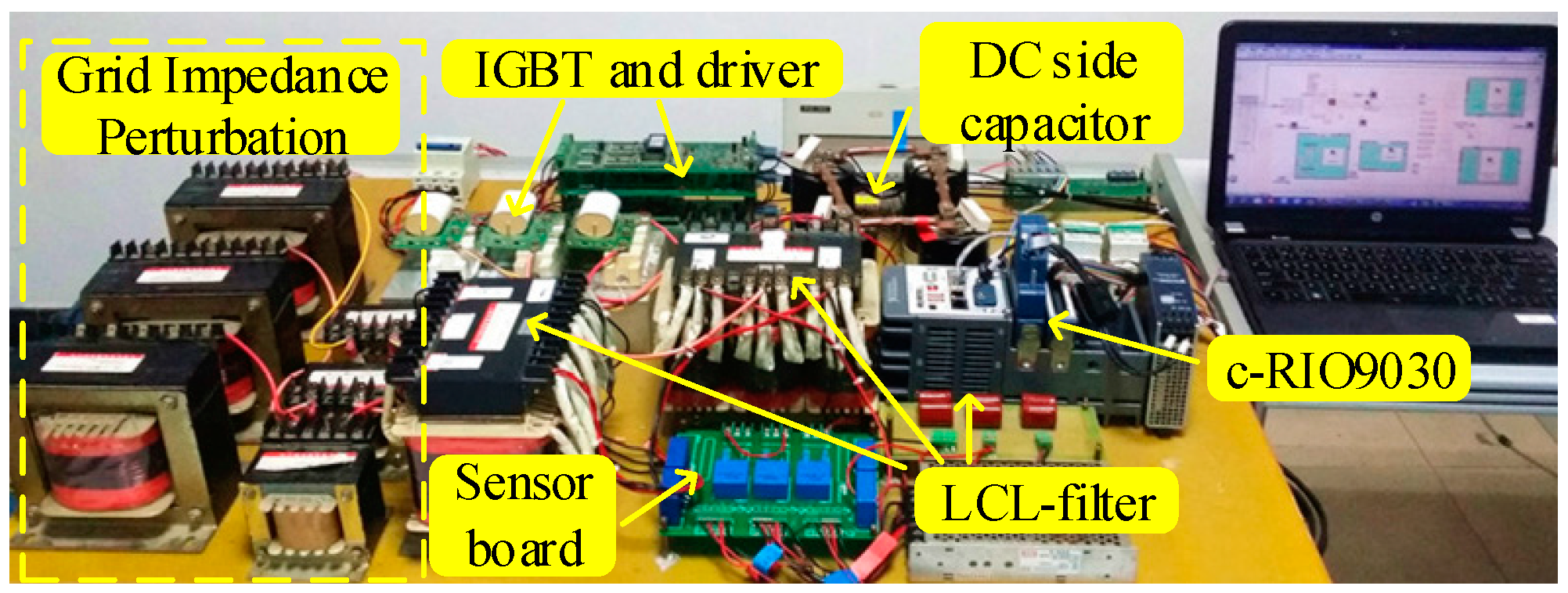
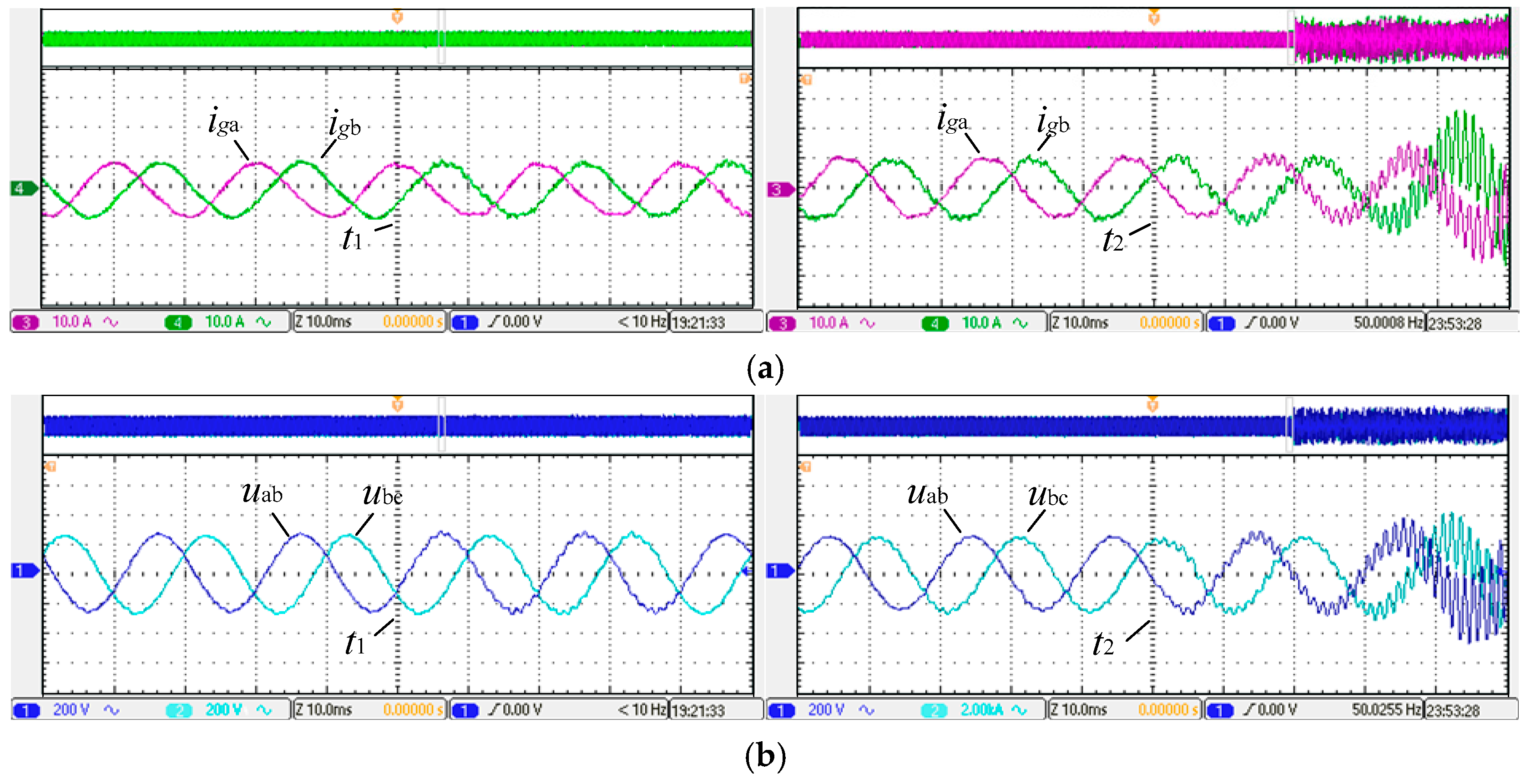
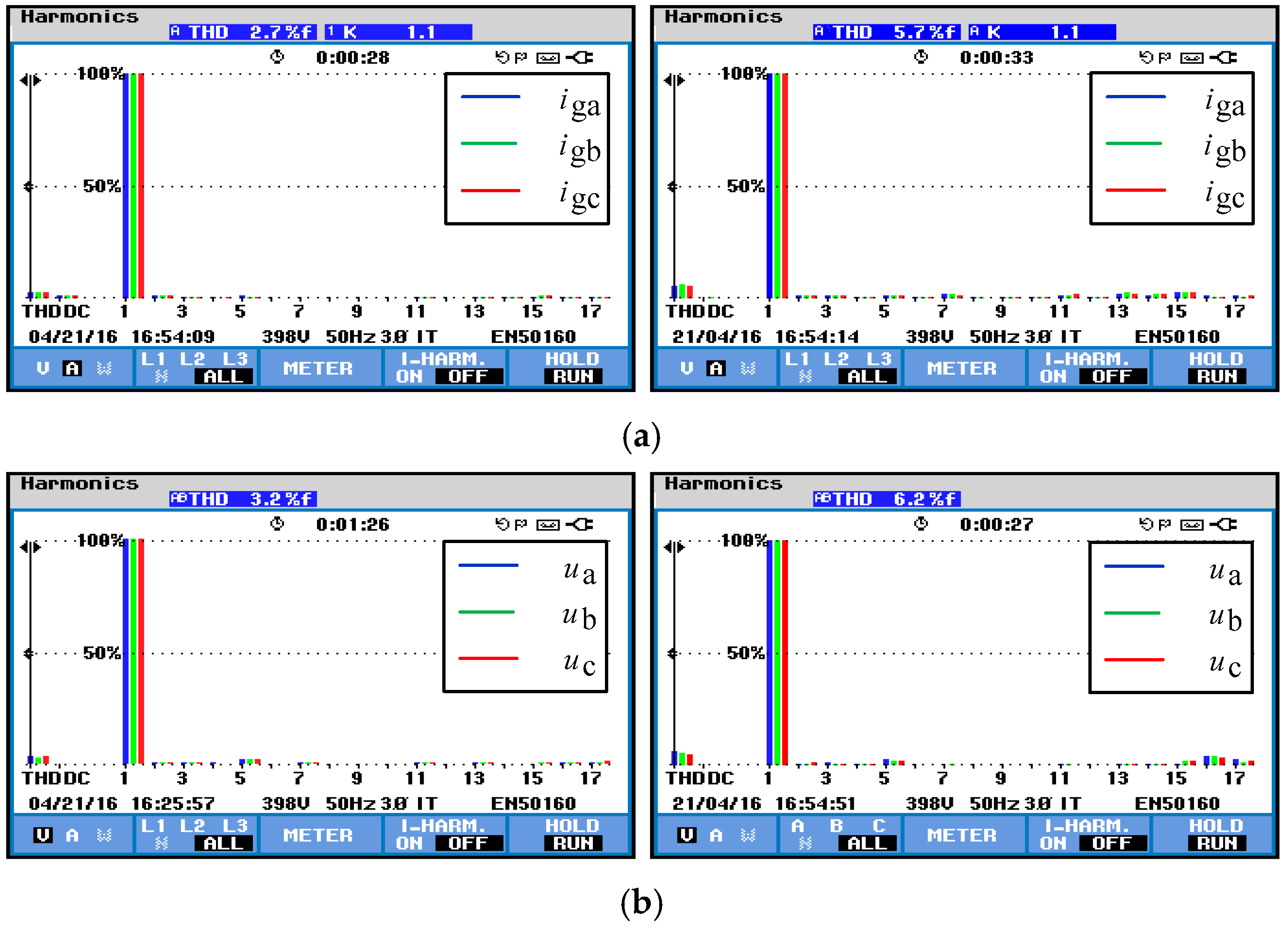
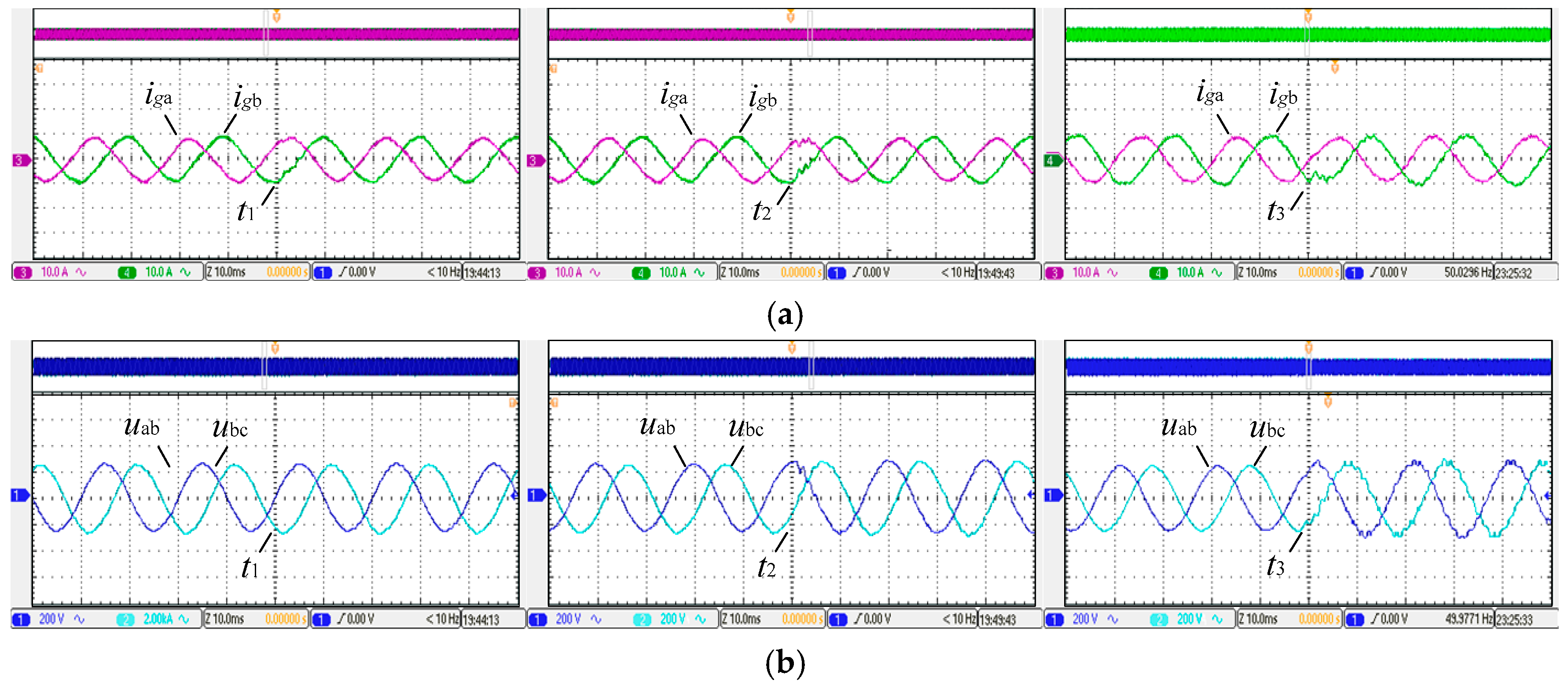
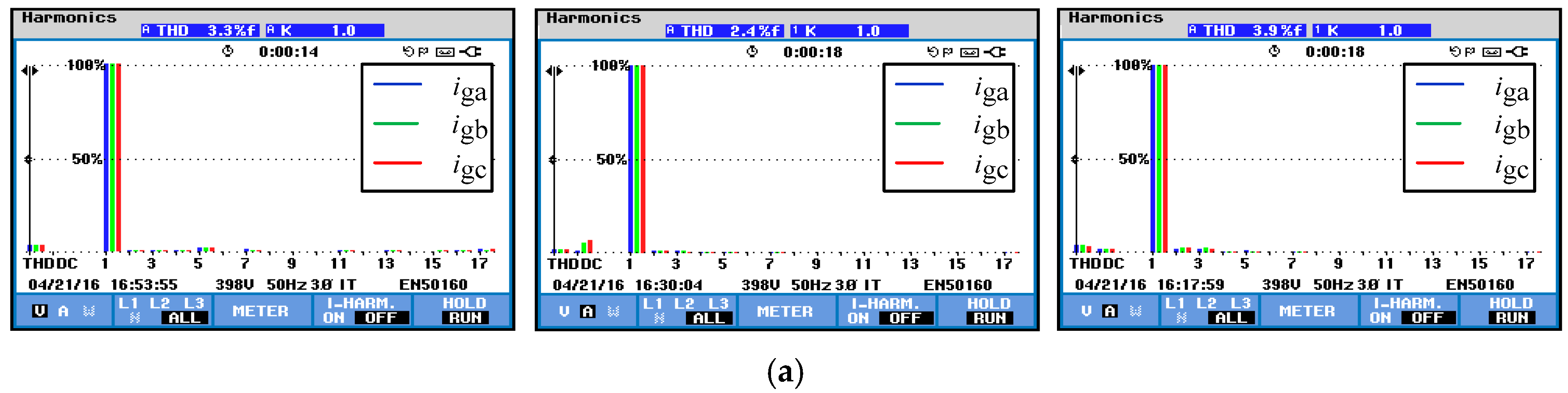
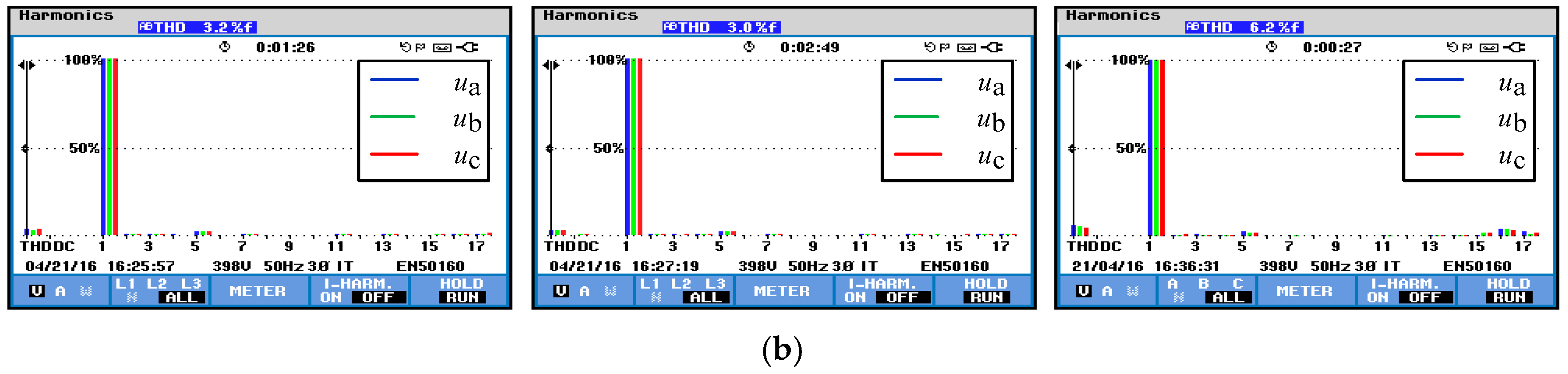
4. Experimental Validation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of Control and Grid Synchronization for Distributed Power Generation Systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Agorreta, J.L.; Borrega, M.; LóPez, J.; Marroyo, L. Modeling and Control of N-Paralleled Grid-Connected Inverters with LCL Filter Coupled Due to Grid Impedance in PV Plants. IEEE Trans. Power Electron. 2011, 26, 770–785. [Google Scholar] [CrossRef]
- Cobreces, S.; Bueno, E.; Rodriguez, F.J.; Huerta, F. Influence Analysis of the Effects of an Inductive-Resistive Weak Grid over L and LCL Filter Current Hysteresis Controllers. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Alborg, Denmark, 2–5 September 2007; pp. 1–10. [Google Scholar]
- Xu, J.; Xie, S.; Tang, T. Evaluations of Current Control in Weak Grid Case for Grid-Connected LCL-filtered Inverter. IET Power Electron. 2013, 6, 227–234. [Google Scholar] [CrossRef]
- Zou, C.; Liu, B.; Duan, S.; Li, R. Influence of Delay on System Stability and Delay Optimization of Grid-Connected Inverters with LCL Filter. IEEE Trans. Ind. Inform. 2014, 10, 1775–1784. [Google Scholar] [CrossRef]
- Lyu, Y.; Lin, H.; Cui, Y. Stability Analysis of Digitally Controlled LCL-type Grid-Connected Inverter Considering the Delay Effect. IET Power Electron. 2015, 8, 1651–1660. [Google Scholar] [CrossRef]
- Wang, J.; Yan, J.D.; Jiang, L.; Zou, J. Delay-Dependent Stability of Single-Loop Controlled Grid-Connected Inverters with LCL Filters. IEEE Trans. Power Electron. 2016, 31, 743–757. [Google Scholar] [CrossRef]
- Yang, D.; Ruan, X.; Wu, H. Impedance Shaping of the Grid-Connected Inverter with LCL Filter to Improve its Adaptability to the Weak Grid Condition. IEEE Trans. Power Electron. 2014, 29, 5795–5805. [Google Scholar] [CrossRef]
- Yang, D.; Ruan, X.; Wu, H. Using Virtual Impedance Network to Improve the Control Performances of LCL-Type Grid-Connected Inverter under the Weak Grid Condition. In Proceedings of the 2014 Twenty-Ninth Annual IEEE Applied Power Electronics Conference and Exposition, Fort Worth, TX, USA, 16–20 March 2014; pp. 3048–3054. [Google Scholar]
- Cespedes, M.; Sun, J. Adaptive Control of Grid-Connected Inverters Based on online Grid Impedance Measurements. IEEE Trans. Sustain. Energy 2014, 5, 516–523. [Google Scholar] [CrossRef]
- Xue, M.; Zhang, Y.; Kang, Y.; Yi, Y.; Li, S.; Liu, F. Full Feed forward of Grid Voltage for Discrete State Feedback Controlled Grid-Connected Inverter with LCL Filter. IEEE Trans. Power Electron. 2012, 27, 4234–4247. [Google Scholar] [CrossRef]
- Li, W.; Ruan, X.; Pan, D.; Wang, X. Full-Feedforward Schemes of Grid Voltages for a Three-Phase LCL-Type Grid-Connected Inverter. IEEE Trans. Ind. Electron. 2013, 60, 2237–2250. [Google Scholar] [CrossRef]
- Xu, J.; Qian, Q.; Xie, S.; Zhang, B. Grid-Voltage Feedforward Based Control for Grid-Connected LCL-Filtered Inverter with High Robustness and Low Grid Current Distortion in Weak Grid. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition, Long Beach, CA, USA, 20–24 March 2016; pp. 1919–1925. [Google Scholar]
- Yang, S.; Lei, Q.; Peng, F.Z.; Qian, Z. A Robust Control Scheme for Grid-Connected Voltage-Source Inverters. IEEE Trans. Ind. Electron. 2011, 58, 202–212. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, J.; Wan, Z.; Lei, J.; Zhang, K. A Time Delay Compensation Method Based on Area Equivalence for Active Damping of an LCL-Type Converter. IEEE Trans. Power Electron. 2017, 32, 762–772. [Google Scholar] [CrossRef]
- Pan, D.; Ruan, X.; Bao, C.; Li, W. Capacitor current feedback Active Damping with Reduced Computation Delay for Improving Robustness of LCL-Type Grid-Connected Inverter. IEEE Trans. Power Electron. 2014, 29, 3414–3427. [Google Scholar] [CrossRef]
- Bao, C.; Ruan, X.; Wang, X.; Li, W. Step-by-Step Controller Design for LCL-Type Grid-Connected Inverter with Capacitor–Current-Feedback Active-Damping. IEEE Trans. Power Electron. 2014, 29, 1239–1253. [Google Scholar]
- Gabe, I.J.; Montagner, V.F.; Pinheiro, H. Design and Implementation of a Robust Current Controller for VSI Connected to the Grid through an LCL Filter. IEEE Trans. Power Electron. 2009, 24, 1444–1452. [Google Scholar] [CrossRef]
- Cobreces, S.; Bueno, E.J.; Rodriguez, F.J.; Pizarro, D.; Huerta, F. Robust Loop-shaping H∞ Control of LCL-connected Grid Converters. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bary, Italy, 4–7 July 2010; pp. 3011–3017. [Google Scholar]
- Kahrobaeian, A.; Mohamed, Y.A.I. Robust Single-Loop Direct Current Control of LCL-Filtered Converter-Based DG Units in Grid-Connected and Autonomous Microgrid Modes. IEEE Trans. Power Electron. 2014, 29, 5605–5619. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, H.; Zhang, G.; Wang, J. Robust Weighted Gain-Scheduling H-Infinity Vehicle Lateral Motion Control with Considerations of Steering System Backlash-Type Hysteresis. IEEE Trans. Control Syst. Technol. 2014, 22, 1740–1753. [Google Scholar] [CrossRef]
- Li, W.K.; Zhou, G.; Chen, Y.B.; Gao, J.D. GA Optimized Signal Based Mixed Sensitivity Controller Design for Ship Heading Changing. In Proceedings of the 2015 Chinese Automation Congress, Wuhan, China, 27–29 November 2015; pp. 179–182. [Google Scholar]
- Gu, D.W.; Petkov, P.H.; Konstantinov, M.M. Robust Control Design with MATLAB®; Advanced Textbooks in Control & Signal Processing; Springer: Berlin, Germany, 2005. [Google Scholar]
- Komurcugil, H.; Altin, N.; Ozdemir, S.; Sefa, I. Lyapunov-Function and Proportional-Resonant-Based Control Strategy for Single-Phase Grid-Connected VSI with LCL Filter. IEEE Trans. Ind. Electron. 2016, 63, 2838–2849. [Google Scholar] [CrossRef]
- Yepes, A.G.; Freijedo, F.D.; Gandoy, J.D.; Lopez, O.; Malvar, J.; Comesana, P.F. Effects of discretization methods on the performance of resonant controllers. IEEE Trans. Power Electron. 2010, 25, 1692–1712. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | ||
|---|---|---|
| Rated power | 2 kW | |
| DC voltage | 400 V | |
| Grid phase voltage | 110 V | |
| Frequency | 50 Hz | |
| Switching frequency | 5 kHz | |
| Sampling frequency | 5 kHz | |
| LCL filter | Lf1 | 2 mH |
| Lf2 | 0.5 mH | |
| Cf | 40 μF | |
| Grid impedance | Lg | [0–4.5] mH, Lgnom = 1.2 mH |
| rg | 0.1 Ω | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wang, J.; Zeng, W.; Liu, H.; Chai, Y. H? Robust Control of an LCL-Type Grid-Connected Inverter with Large-Scale Grid Impedance Perturbation. Energies 2018, 11, 57. https://doi.org/10.3390/en11010057
Wang Y, Wang J, Zeng W, Liu H, Chai Y. H? Robust Control of an LCL-Type Grid-Connected Inverter with Large-Scale Grid Impedance Perturbation. Energies. 2018; 11(1):57. https://doi.org/10.3390/en11010057
Chicago/Turabian StyleWang, Yingjie, Jiashi Wang, Wei Zeng, Haiyuan Liu, and Yushuo Chai. 2018. "H? Robust Control of an LCL-Type Grid-Connected Inverter with Large-Scale Grid Impedance Perturbation" Energies 11, no. 1: 57. https://doi.org/10.3390/en11010057
APA StyleWang, Y., Wang, J., Zeng, W., Liu, H., & Chai, Y. (2018). H? Robust Control of an LCL-Type Grid-Connected Inverter with Large-Scale Grid Impedance Perturbation. Energies, 11(1), 57. https://doi.org/10.3390/en11010057