1. Introduction
A Wireless Sensor Network (WSN) is a network formed by a large number of wireless sensors embedded with different kinds of devices to detect physical phenomena such as pressure, light, heat, etc. The first use of these sensors was in military applications such as video surveillance in conflict areas [
1]. Today, there are many short-range communication technologies such as ZigBee, Wi-Fi, etc. which are used to support sensor-based devices. These technologies can operate on the license-free Industrial, Scientific, and Medical Band (ISM) [
2,
3] with different communication ranges. WSNs are quickly gaining popularity for sensing and monitoring with real applications in the building field. This is extended to many applications in industrial infrastructure, health, automation, traffic, and various consumer areas [
4].
Sensor nodes that operate in these applications are often exposed to different challenges due to their limited capabilities, which include limited power (battery), limited memory size, and limited communication ranges [
5]. The mismanagement and misuse of these devices will reduce the network lifetime and reduce the Quality of Service (QoS), especially in dense networks. For instance, if the packet payload size increases, the probability of dropping the packet will be increased, and the retransmission of these packets requires reallocation of the dropped packets in the memory and consumes more battery power. In addition, this procedure will take more time, which leads to increased network delay.
To mitigate the effect of the aforementioned challenges, various optimization methods have been used by prior researchers. These methods are typically used to optimize a set of mathematical features of the network such as throughput, network coverage, network energy consumption, etc. [
6,
7,
8,
9,
10,
11,
12,
13,
14,
15]. These features also include the effect of various network parameters such as packet payload size, frequency range, and the distance between sender and receiver. In addition, these features involve the parameters of interference such as Packet Error Rate (PER) based on the interference from other devices that operate on the same frequency band. Though the study of these features is important, prior works do not pay much attention to finding the optimum value for some parameters of a physical layer such as packet payload size. Packet payload size can affect some of the important network model features such as end-to-end delay, end-to-end latency, energy efficiency, and network throughput. The study of these features is very important, especially in WSN applications that can be affected by delays such as health monitoring networks, smart grid networks, and disaster monitoring networks. For this reason, optimization algorithms are important to determine the optimal value of the different parameters that affect network QoS.
We choose a smart grid as a case study to prove the ability of our algorithm in solving different kinds of real-life problems and also because the smart grid has problems that can be represented in objective functions similar to the aforementioned objective functions used in our Multi-Objective Optimization Algorithm Based on Sperm Fertilization Procedure (MOSFP) that has a higher efficiency and the ability of providing an optimal solution for them. Examples of these objective functions are end-to-end delay and end-to-end latency, where the latency is affected by the end-to-end delay results.
In this work, four complex computational algorithms known to date: Optimized Multi-Objective Particle Swarm Optimization (OMOPSO) [
16], Non-Dominated Sorting Genetic Algorithm (NSGA-II) [
17], Strength Pareto Evolutionary Algorithm 2 (SPEA2) [
18], and our proposed MOSFP [
19] are applied. The motivation of this paper is to find the optimal value of packet payload size that manages the trade-offs between objective functions. The optimal value considers four objective functions, which include energy efficiency, packet throughput, end-to-end delay, and end-to-end latency. The inclusion of these four objective functions is believed to improve QoS of a communication link in the smart grid network unlike most of the prior work that only focuses on maximizing network coverage and minimizing energy consumption. In this paper, we propose to apply our proposed MOSFP method that is inspired by sperm motility to fertilize the egg to find the optimal value of packet payload size based on the aforementioned objective functions.
The complexity of real life problems in WSN increases with time due to the limited power, memory size, and communication ranges of sensor nodes. Most of the available metaheuristic techniques suffer from slow convergence and bad local search ability. Therefore, solving the real life problems in WSN will require a more powerful metaheuristic-based technique. The advantages of MOSFP over the other algorithms are the ability of MOSFP to solve complex objective functions, such as Zitzler-Deb-Thiele 3 (ZDT3) and solve functions that contain more than two objective functions, such as Walking-Fish-Group 5 and 8 (WFG5 and WFG8) as proved in our prior paper [
19]. Additionally, MOSFP has the advantages of finding a good approximation of Pareto front and attending a high amount of points of the true Pareto front for these objective functions [
19]. In this paper, we choose a smart grid as a case study because smart grids have problems that can be represented by the objective functions similar to ZDT3, WFG5, and WFG8 in which MOSFP has a higher efficiency and ability to provide an optimal solution for them. This is because MOSFP has a higher convergence and spread of the results than OMOPSO, NSGA-II, and SPEA2 while solving these kinds of problems. Examples of these objective functions that have the same features of the aforementioned problems are end-to-end delay and end-to-end latency, where the latency is affected by the results of end-to-end delay.
In addition, the four aforementioned algorithms will be used to study the effect of packet payload size to the network QoS as well as how this parameter plays a significant role in minimizing both end-to-end delay and end-to-end latency and also in maximizing both energy efficiency and packet throughput. In the first stage, the four algorithms are evaluated to find the most efficient algorithm. This is followed by Pareto-optimal set analysis to find the optimal value of packet payload size that minimizes both end-to-end delay and end-to-end latency and maximizes both energy efficiency and packet throughput.
This paper is organized as follows:
Section 2 presents a literature review.
Section 3 shows the multi-objective optimization algorithms.
Section 4 discusses the quality of service features of WSNs.
Section 5 presents a case study.
Section 6 presents the methodology and experimental setup.
Section 7 presents our experimentation and results. We conclude the findings in
Section 8.
3. Multi-Objective Optimization Algorithms
The aim of any multi-objective optimization algorithm is to search for a set of solutions that manages the trade-offs among a set of conflicting optimization features, such as minimization and maximization features [
33]. In addition, multi-objective optimization algorithms help to determine an unconstrained maxima or minima, and the optimal solution of continuous or differentiable objective functions [
34]. These algorithms use different strategies and techniques in finding the result. For instance, PSO algorithm proposed by Kennedy et al. [
35], is based on social interaction and movement of a bird swarm in search for food. In each swarm, there is a bird called a leader, which gives orders to the other birds in the swarm to adjust their velocity and location. On the other hand, Genetic Algorithm (GA) is based on the Darwinian theory of evolution, which simulates the construction of chromosome and its evolution. Furthermore, it stimulates the natural process of selecting the most convenient chromosome from a wide set of populations to achieve the optimal solution for a wide variety of optimization problems [
36]. The GA performs a set of natural operations, including, different types of natural selection, crossover, and mutation to create a better generation [
36]. In a different view, our algorithm Sperm Swarm Optimization (SSO) algorithm is a novel single objective optimization algorithm developed based on a metaphor of a natural fertilization procedure, which simulates the motility of sperm swarm through the fertilization procedure [
37]. SSO is inherently continuous technique of updating the position and velocity of each sperm on search space domain until reaching the optimal solution [
19,
37].
Due to the wide variety of optimization problems that need a solution at low cost in short time, many researchers have extended these algorithms to solve different kinds of multi-objective problem. Therefore, we propose to apply three optimization algorithms to determine the optimal solution of a set of features that affect the QoS of any WSN. These algorithms are OMOPSO [
16], NSGA-II [
17], and SPEA2 [
18]. In addition, we use our multi-objective version of SSO algorithm, called MOSFP algorithm for this purpose [
19]. The selection of these algorithms was not arbitrary, which study in [
38] finds that OMOPSO is the most commonly use algorithm among the swarm intelligence algorithms. This is because OMOPSO has a higher quality of results and performance. Other studies in [
15,
39] show that both NSGA-II and SPEA2 are the most popular algorithms among the evolutionary algorithms. Accordingly, we chose these algorithms along with our algorithm (MOSFP) in this study. Furthermore, it is good to use more than one algorithm, which helps to confirm the optimal results of the proposed problem at the end of the test.
It should be noted that SSO, PSO and their extended versions such as MOSFP and OMOPSO are inherently continuous procedures, i.e., they use three steps to update the population until the maximum number of iterations is reached. First, the position and velocity of the population are generated. Second, the velocity is updated and finally, the position is updated. SPEA2 and NSGA-II (the extended version of GA) are inherently discrete procedures, which encode the population into 1’s and 0’s; therefore, it easily performs discrete design variables. In SPEA2 and NSGA-II, the procedures perform the natural selection, crossover, and mutation operation [
40]. In OMOPSO, the new position of each individual is based on the past position, which the neighborhood and the global best position guide the search on the search space domain [
16]. In MOSFP, the new position of each individual is based on the past position, which the global best solution (position of the winner) is used as a reference value for other members in the swarm to adjust their velocities on the search space domain [
19]. In addition, we can notice that the genetic algorithms (i.e., GA, NSGA-II, and SPEA2) deal with each individual in the population independently, which perform ranking operation on solutions, after that, perform a selection operation to filter out the best solutions and eliminate the others. On the other hand, PSO and its extended version OMOPSO do not perform ranking and selection operations, which use the solution of swarm leader (best solution) to add it for other individual solutions. OMOPSO uses a set of mutation operations to increase the algorithm convergence such as uniform mutation and non-uniform mutation. In a different view, SSO and its extended version MOSFP use mutation operation to increase the algorithm convergence. However, they do not perform the GA operations such as crossover, ranking and selection operations, which use the best solution (the value of winner) as a reference value for other members in the swarm to adjust their velocities.
On the other hand, there are new types of optimization algorithms called a Memetic Algorithm (MA) or an advanced or Hybrid GA. This type of algorithm is inspired by Darwinian’s theory of natural evolution that simulates the construction of chromosome and its evolution as well as it uses Dawkin’s notion of a meme. Meme is considered as a unit of cultural evolution capable of individual learning. Through the algorithm evaluation, every meme earns some experience through a local search before going in to evolution of new generations. The Memetic Algorithms (MAs) use GA operations namely, ranking, natural selection, crossover, and mutation operations with the addition of local search [
41,
42]. The comparison between SSO, MOSFP, PSO, OMOPSO, GA, NSGA-II, SPEA2 and MA (Hybrid GA) are summarized in
Table 3 [
16,
17,
18,
19,
37,
40,
41,
42,
43].
(A) Optimized multi-Objective Particle Swarm Optimization (OMOPSO)
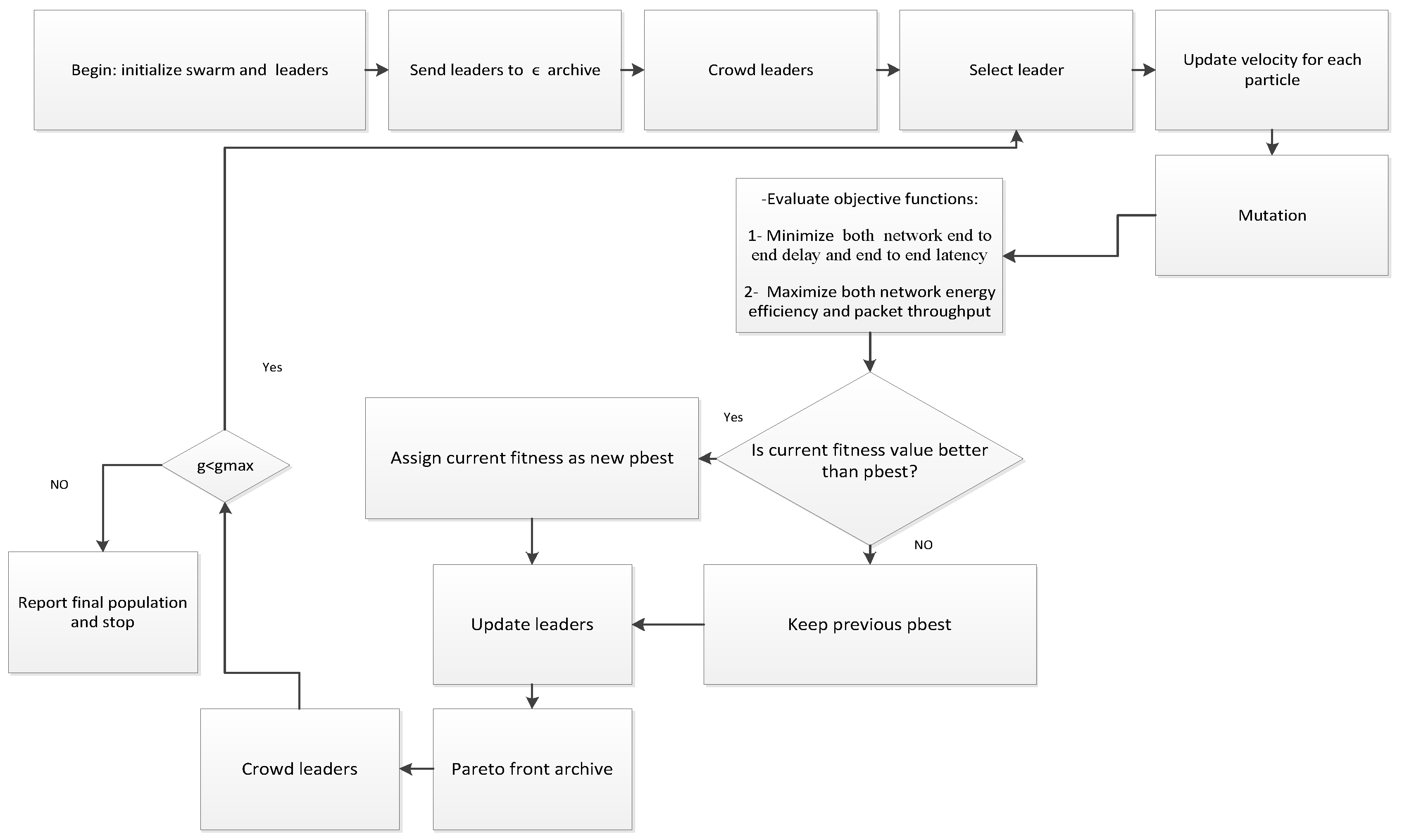
OMOPSO is one of the most popular algorithms in the area of multi-objective optimization that based on a set of operations such as crowding operation. Crowding operation is used to crowd the best global solutions that are known as leaders; archive operation, which is used to store the obtained best solutions; mutation operation, which is used to increase the coverage of the algorithm. The pseudo-code for this algorithm is summarized in Algorithm 1 [
16].
| Algorithm 1: Optimized Multi-Objective Particle Swarm Optimization (OMOPSO) [16] |
| 1: Begin |
| 2: Step 1: initialize swarm and leaders. Send leaders to ∈ −archive |
| 3: Step 2: crowding(leaders), iteration (g = 0) |
| 4: Step 3: while g < max number of iterations (gmax) |
| 5: For <each particle> do |
| 6: Select leader. Flight. Mutation. Evaluation. Update particle best value (pbest). |
| 7: End for |
| 8: Update leaders, Send leaders to ∈ −archive |
| 9: Crowding (leaders), g++ |
| 10: End while |
| 11: Step 4: Report results in ∈ −archive |
| 12: End procedure |
(B) Non-Dominated Sorting Genetic Algorithm (NSGA-II)
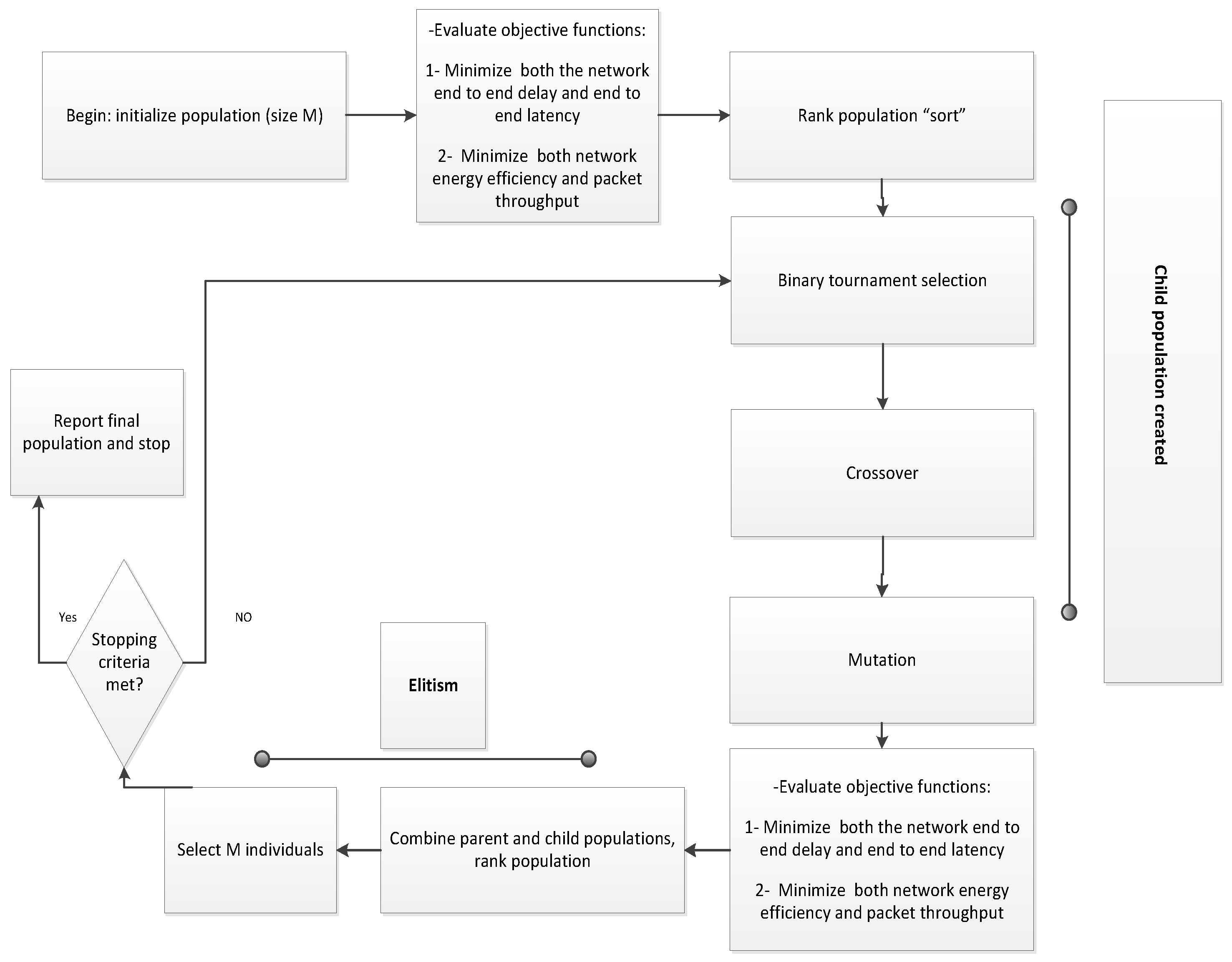
NSGA-II is a multi-objective version of the genetic algorithm [
17] that performs a set of operation such as selection, mutation and classical crossover operation [
44]. Algorithm 2 summarizes the pseudo-code of NSGA-II [
45].
| Algorithm 2: Non-dominated Sorting Genetic Algorithm (NSGA-II) [45] |
| 1: Begin |
| 2: Step 1: initialize Population |
| 3: Generate random population—size M. |
| 4: Step 2: evaluate objective values |
| 5: Step 3: assign rank (level) based on Pareto dominance-“sort” |
| 6: Step 4: generate child population |
| 7: Step 5: binary tournament selection and crossover |
| 8: Step 6: recombination and mutation |
| 9: Step 7: for i = 1 to the number of generations do |
| 10: With parent and child population |
| 11: Assign rank (level) based on Pareto—“sort” |
| 12: Generate sets on non-dominated fronts |
| 13: Loop (inside) by adding solutions to next generation |
| 14: Starting from the “first” front until M individuals found |
| 15: Determine crowding distances between points on each front |
| 16: Select points (elitist) on the lower front (with lower rank) and are outside a crowding |
| 17: Distance |
| 18: Create next generation |
| 19: Binary tournament selection |
| 20: Recombination and mutation |
| 21: Increment generation index |
| 22: End for |
| 23: End procedure |
(C) Strength Pareto Evolutionary Algorithm 2 (SPEA2)
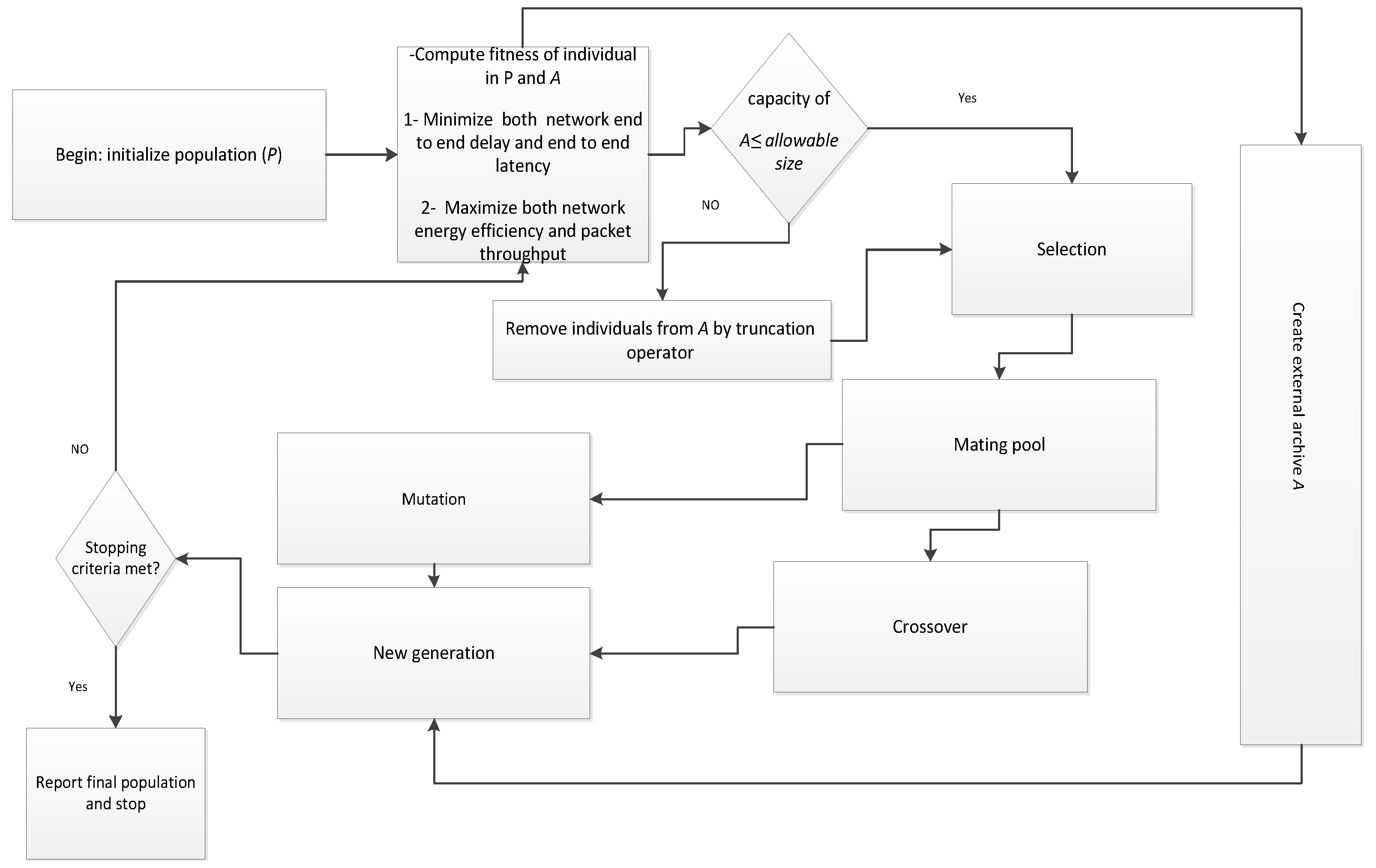
SPEA2 is a multi-objective optimization algorithm [
18] and an improved version of SPEA algorithm [
46]. Nearest neighbor technique is used to guide the search on a search space domain, which each individual in the population dominates or dominated by other solution. Furthermore, this algorithm uses the archive truncation procedure to maintain the obtained best solutions. The pseudo-code of this algorithm is summarized in Algorithm 3 [
46].
| Algorithm 3: Strength Pareto Evolutionary Algorithm 2 (SPEA2) [46] |
| 1: Begin |
| 2: Step 1: initialize population (P) |
| 3: Step 2: evaluate objective functions |
| 4: Step 3: create external archive (A) |
| 5: Step 4: for i = 1 to the number of generations do |
| 6: Compute fitness of individual in P and A |
| 7: Add non-dominated individuals from P and A |
| 8: If capacity of A is exceeded than allowable size then |
| 9: Remove individuals from A by truncation operator |
| 10: End if |
| 11: Perform binary tournament selection to create mating pool |
| 12: Perform crossover |
| 13: Perform mutation |
| 14: End for |
| 15: End procedure |
(D) Multi-Objective Optimization Algorithm Based on Sperm Fertilization Procedure (MOSFP)
MOSFP algorithm is our algorithm proposed in [
19] that simulates sperm swarm motility when they fertilize the egg. This algorithm is a multi-objective version of SSO algorithm that proposed in [
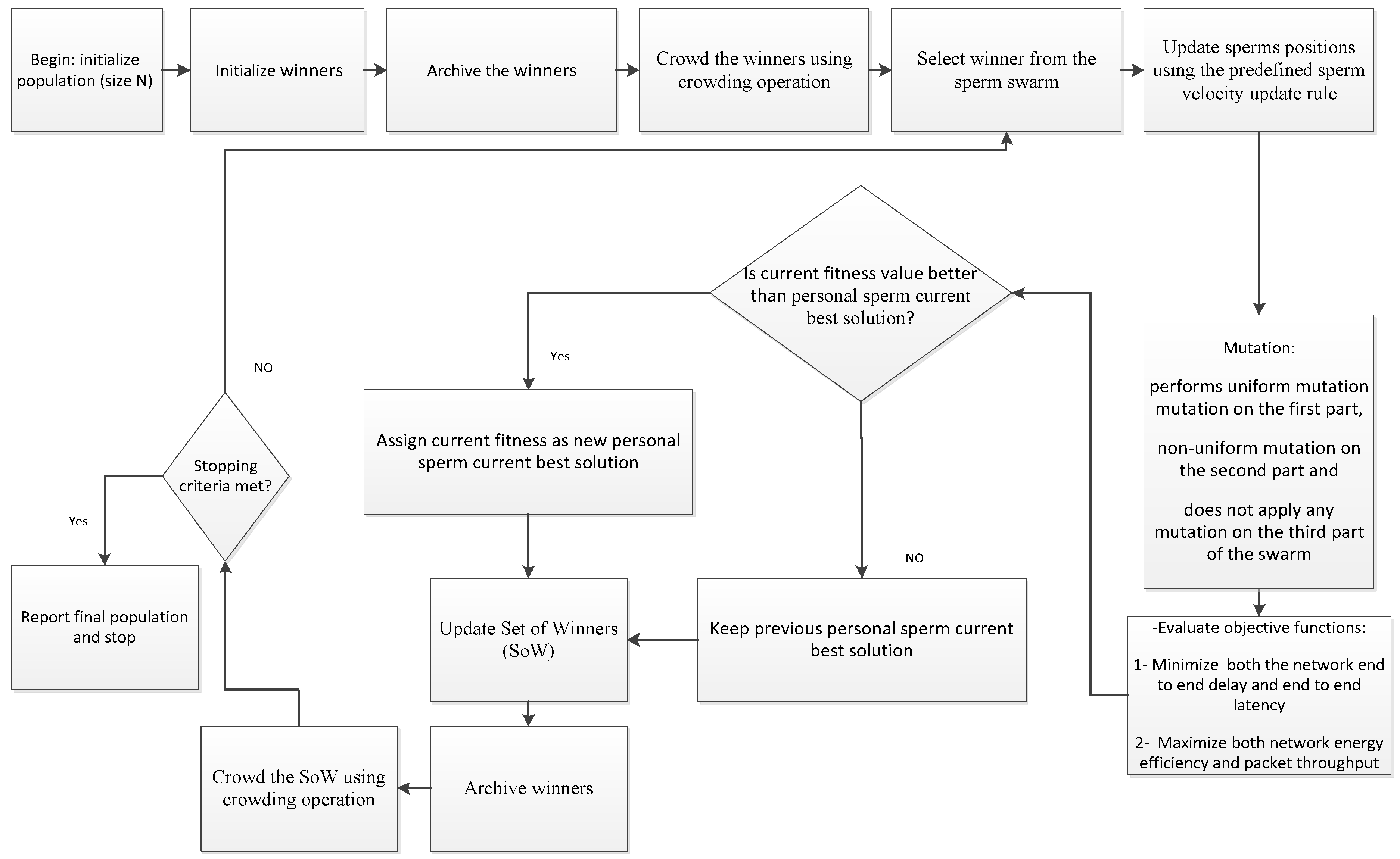
37]. MOSFP algorithm performs a set of operations to find a solution for multi-objective optimization problems. These operations are crowding, which is used to crowd the global best solutions that are known as winners, mutation, which divides the swarm into three equal parts, after that, performs uniform mutation on the first part and non-uniform mutation on the second part, and also it does not apply any mutation on the third part of the swarm. At the end, it performs archive on the winners. Algorithm 4 summarizes MOSFP procedure. In addition, Algorithm 5 summarizes the mutation part of MOSFP algorithm [
19].
Appendix A demonstrates how the MOSFP algorithm works.
| Algorithm 4: Multi-objective Optimization Algorithm based on Sperm Fertilization Procedure (MOSFP) [19] |
| 1: Begin |
| 2: Step 1: initialize positions for all sperms. |
| 3: Step 2: initialize Winners. |
| 4: Step 2: archive the Winners in ∈ −archive |
| 5: Step 3: crowd the winners using crowding operation. |
| 6: Step 4: define counter (i) and define number of maximum iterations (iMax). |
| 7: Step 5: do//this do is a do—while |
| 8: For <each sperm> do |
| 9: Select winner from the sperm swarm |
| 10: Update sperms positions using the predefined sperm velocity update rule (perform swim) |
| 11: Perform mutation procedure (Algorithm 5) |
| 12: Evaluate the fitness for each sperm |
| 13: Update personal sperm current best solution |
| 14: End if |
| 15: Update Set of Winners (SoW) |
| 16: Archive winner in ∈ −archive |
| 17: Crowd the SoW using crowding operation |
| 18: Update value of counter (i) |
| 19: Step 6: while i < iMax |
| 20: Step 7: archive results in ∈ −archive |
| 21: End procedure |
| Algorithm 5: Mutation |
| 1: Begin |
| 2: Step 1: for i = 0 to population size do |
| 3: If (i % 3 = = 0) then |
| 4: Sperms_ mutated with a non-uniform mutation operator |
| 5: Else if (i % 3 = = 1) then |
| 6: Sperms_ mutated with a uniform mutation operator |
| 7: Else |
| 8: Sperms_ without mutation |
| 9: End if |
| 10: End for |
| 11: End procedure |
We have standardized all the symbols and the naming convention throughout the manuscript, which the abbreviation of these algorithms and their pseudocodes are kept as their resources [
16,
19,
45,
46] without any changes. The abbreviations of previous mentioned algorithms are summarized in the following
Table 4:
The Crossover and Mutation of Algorithms
Based on the previous pseudocodes of the aforementioned algorithms, we can notice that NSGA-II and SPEA2 use both crossover and mutation operations while OMOPSO and MOSFP use different types of mutation operations. In this section, we review these operations based on the JMetal tool [
47]. JMetal tool is considered as one of the most popular tool in the area of optimization, which contains many types of single-objective and multi-objective optimization algorithms.
Crossover operator is a genetic operator that changes a chromosome from one generation to the next to produce new results. NSGA-II and SPEA2 use Simulated Binary Crossover (SBX) [
48]. The SBX of chromosome (
X) can be calculated by:
where
β is a random variable in the range of 0 and 1.
X is the value of chromosome while
Y is the value of chromosome after the crossover. The probability distribution of variable
β can be calculated by:
where
ηc is the distribution index.
Mutation operator is any changes on the variable or gene of a chromosome that can produce better value. NSGA-II and SPEA2 use a polynomial mutation, while MOSFP and OMOPSO use uniform and non-uniform mutation.
(a) Polynomial mutation: this mutation is proposed by Deb et al. [
49]. This mutation can be summarized via the following equation:
where
p is the parent solution
p ∈ [
x(U),
x(L)], where
x(L) is the lower bound value, while
x(U) is the upper bound value of a variable. The (
U) symbol is a random number in the range of 0 and 1. The two parameters
δL and
δR are calculated as follows [
49]:
The parent point p = 3.0 in a bounded range of 1 and 8 with nm = 20.
(b) Uniform mutation of value
x used in MOSFP and OMOPSO can be summarized in the following equation [
50]:
where,
xi,j is the position of sperm or particle,
x(L) is the lower bound value,
x(U) is the upper bound value of sperm or particle and (
U) is a random number in the range of 0 and 1.
(c) Non-uniform mutation of value
xi,j use in MOSFP and OMOPSO can be summarized in the following equation [
51]:
where,
x(L) is the lower bound value,
x(U) is the upper bound value of sperm or particle, (
u) is a random number in the range of 0 and 1. The function Δ(
t,y) can be calculated as follows [
51]:
where,
y is a variable with two cases; case 1 is the (
x(U) −
xi,j); case 2 is the (
xi,j − x(L)), (
U) is a random number in the range of 0 and 1,
T is the maximum number of generations and (
z) is a system parameter determining the degree of dependency on the iteration number.
5. Case Study
A smart grid [
55] is considered in this paper as a case study. The smart grid is mostly considered to be the modern generation electricity grid [
55]. This grid will be integrated with a wide variety of technologies allowing information technology to spread in the areas of broadband wireless communication, embedded sensing, adaptive control, and pervasive computing, to significantly improve the performance, stability, sustainability, and security of the electrical grid.
The communication infrastructure of the smart grid provides three fundamental functionalities, including, sensing, transmitting, and monitoring for control. The sensing functionality is carried out by different types of embedded sensors and smart meters to detect the status of different areas of the grid in a real-time manner. The smart grid should support the two-way data transmission links between the control centers and the sensors [
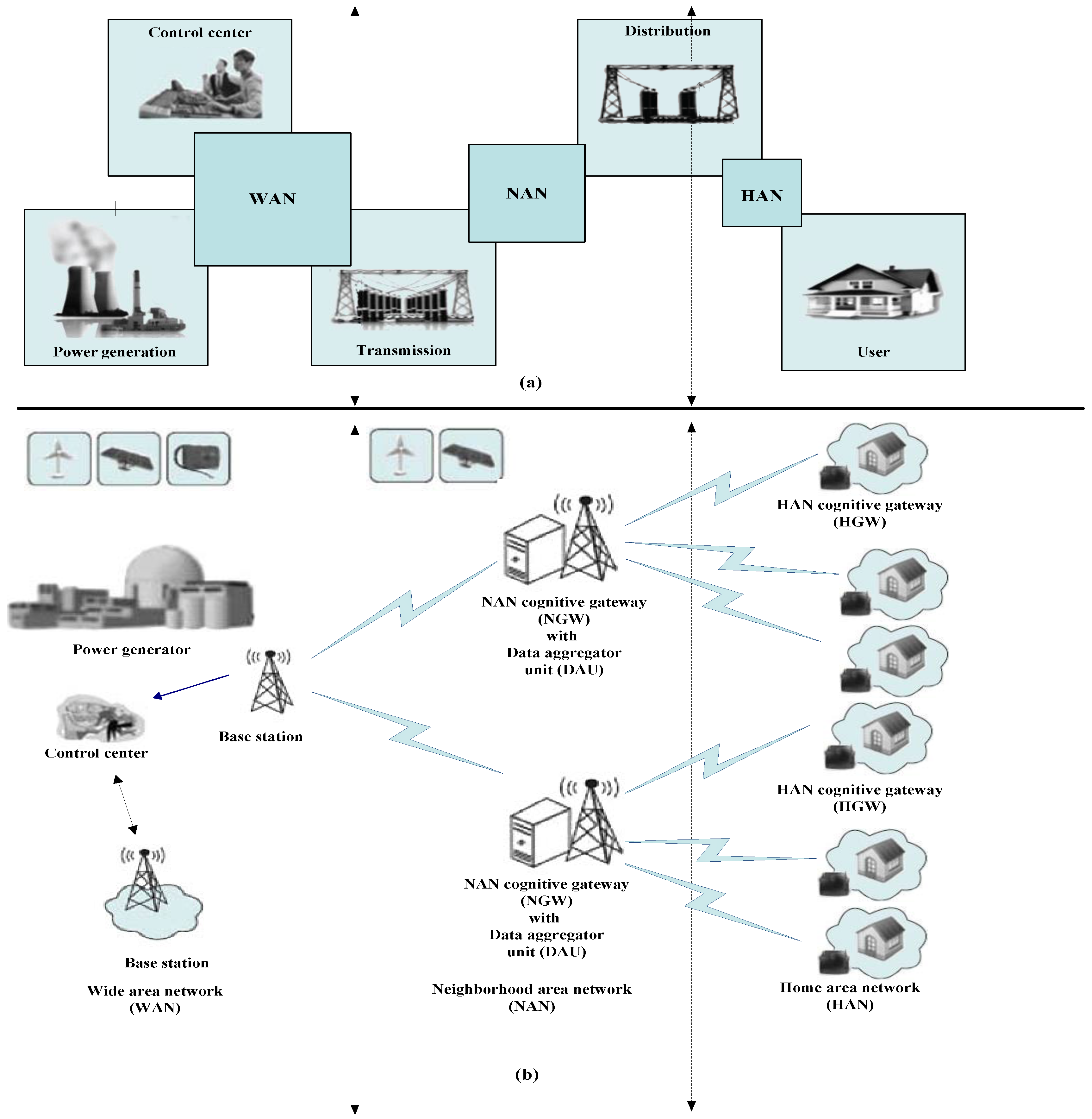
56]. Control instructions are transmitted from/to sensors or smart meters fixed in different places to support reliable and stable access to grid components and also to guarantee the high-performance operations of the smart grid. To fulfill these issues, smart grid infrastructure consists of three parts different in their location and size [
57]. These parts can be summarized in the following points:
- (a)
Home Area Network (HAN): The HAN uses a local area wireless or short-range communication to support real-time data transmission of a smart meter, power load control, and dynamic pricing by connecting different kinds of devices with actuators, sensors, in-home display, and smart meter. Wireless technologies are the suitable choices for HANs because of their flexibility, high performance of control, and low installation cost. An example of this technology is ZigBee, which is a suitable for HANs due to high interoperability [
58,
59]. HAN gateway is used to transmit data to an external entity such as Data Aggregator Unit (DAU). DAU is used to collect the smart meters’ data and transfer these data to control center. The HAN gateway can be standalone within home devices (e.g., programmable thermostat or in-home display) or alternatively integrated with HAN smart meter.
- (b)
Neighborhood Area Network (NAN): The NAN connects a set of HANs together and also connects HANs with the control center. As shown in
Figure 3b the mission of the HAN gateway is to send meter data to a DAU through the NAN. The DAU communicates with the HAN gateway using network technologies such as 801.11 s, RF mesh, WiMAX, 3G, 4G, and LTE. DAU can operate as a NAN gateway to transfer the collected data to a Meter Data Management System (MDMS), which is a control center used to collect data, process the meter power consumption data, store these data, generate a report about power generation, and manage the place of power distribution [
58,
60].
- (c)
Wide Area Network (WAN): The WAN connects remote systems together in a smart grid. Examples of these systems are MDMS, Advanced Metering Infrastructure (AMI), which is used to aggregate the data from the smart meter, and Synchronous Optical Network (SONET). The Wide-Area Measurement System (WAMS) in a WAN is responsible to manage the transmission and aggregate data for control purposes and power load measurement. The WAN supports a backhaul connection among distributed subsystems, power generators, customer premises, and the public utility. In this case, the backhaul can support different kinds of technologies (e.g., broadband wireless access or cellular network) to transmit the meter data from a NAN to the DAU, after that, from the DAU to MDMS at local offices. A WAN gateway supports broadband connection such as WiMAX, satellite, and 3G to collect the required data [
58,
61].
A smart grid uses a hierarchical communications infrastructure to increase the performance of the network. However, smart grids have as a main challenge the increasing number of smart meters [
62]. This increases the network delay, especially in crowded cities. For this reason, in this paper, we are going to minimize the end-to-end delay of WSN to increase its QoS. The hierarchical communications infrastructure of the smart grid is shown in
Figure 3 [
63].
Table 5 summarizes the smart grid characteristics based on hierarchical communications infrastructure [
63,
64]. Based on these features, we can notice that HAN is the only part of the smart grid that used the short-range communication protocols such as IEEE 802.15.4/ZigBee. The features of IEEE 802.15.4 are summarized in the following subsections.
IEEE 802.15.4 Protocol
IEEE 802.15.4/ZigBee standard is a modern wireless communication protocol. This protocol has a set of features that make it convenient to use with smart grid, including cheap price, low power consumption, low complexity, and good data rate. This protocol supports Carrier Sense Multiple Access (CSMA), which is used to access the medium with no collision. IEEE 802.15.4/ZigBee standard can be operated on various license-free frequency bands. These bands support different numbers of channels, data transmission rate, and different frequency ranges [
64]. The available radio frequency bands that are supported by IEEE 802.15.4/ZigBee standard [
65] are summarized in
Table 6 along with their characteristics. In this work, we choose the 2.4 GHz band because it can operate on 16 channels with a higher data transmission rate equal to 250 Kbps, and very important thing; this band is allowed to be applied in Asia [
66,
67].
Different types of network topologies can be supported by IEEE 802.15.4/ZigBee such as star topology, peer to peer (mesh topology), and cluster tree topology [
68]. The data frame structure that is supported by IEEE 802.15.4/ZigBee is summarized in
Table 7. This structure consists of four parts including, MAC command frame, data frame, beacon frame, and acknowledgment frame. Based on
Table 7, the MAC packet size that is supported by IEEE 802.15.4/ZigBee is equal to 127 bytes. In addition, 114 bytes are the maximum packet payload size that is supported by IEEE 802.15.4/ZigBee [
53].
6. Methodology and Experimental Setup
In this section, we focus on the HAN part of the smart grid. This part consists of IEEE 802.15.4/ZigBee smart sensors that embedded in different types of home appliances. These sensors operate based on MicaZ platform [
69]. The characteristics of MicaZ platform are summarized in
Table 8 [
70].
The MicaZ platform is a good choice for the smart grid because it operates with low power consumption, works on the license-free band (ISM band), and covers up to 30 m of home or building area. However, this platform has limited energy resource, which operates based on 2× AA batteries. The misuse of the devices will deplete the battery power and decrease the node lifetime. On the other hand, the network delay will be increased with an increasing number of smart meters in HANs, especially in crowded cities. Therefore, if the delay increases, the number of dropped packets will be increased and retransmitting the dropped packets will consume more power and time. Therefore, we used four algorithms namely, the MOSFP, OMOPSO, NSGA-II, and SPEA2 algorithms, to maximize both the network energy efficiency and network throughput; in particular we use these algorithms to minimize both the network end-to-end delay and end-to-end latency.
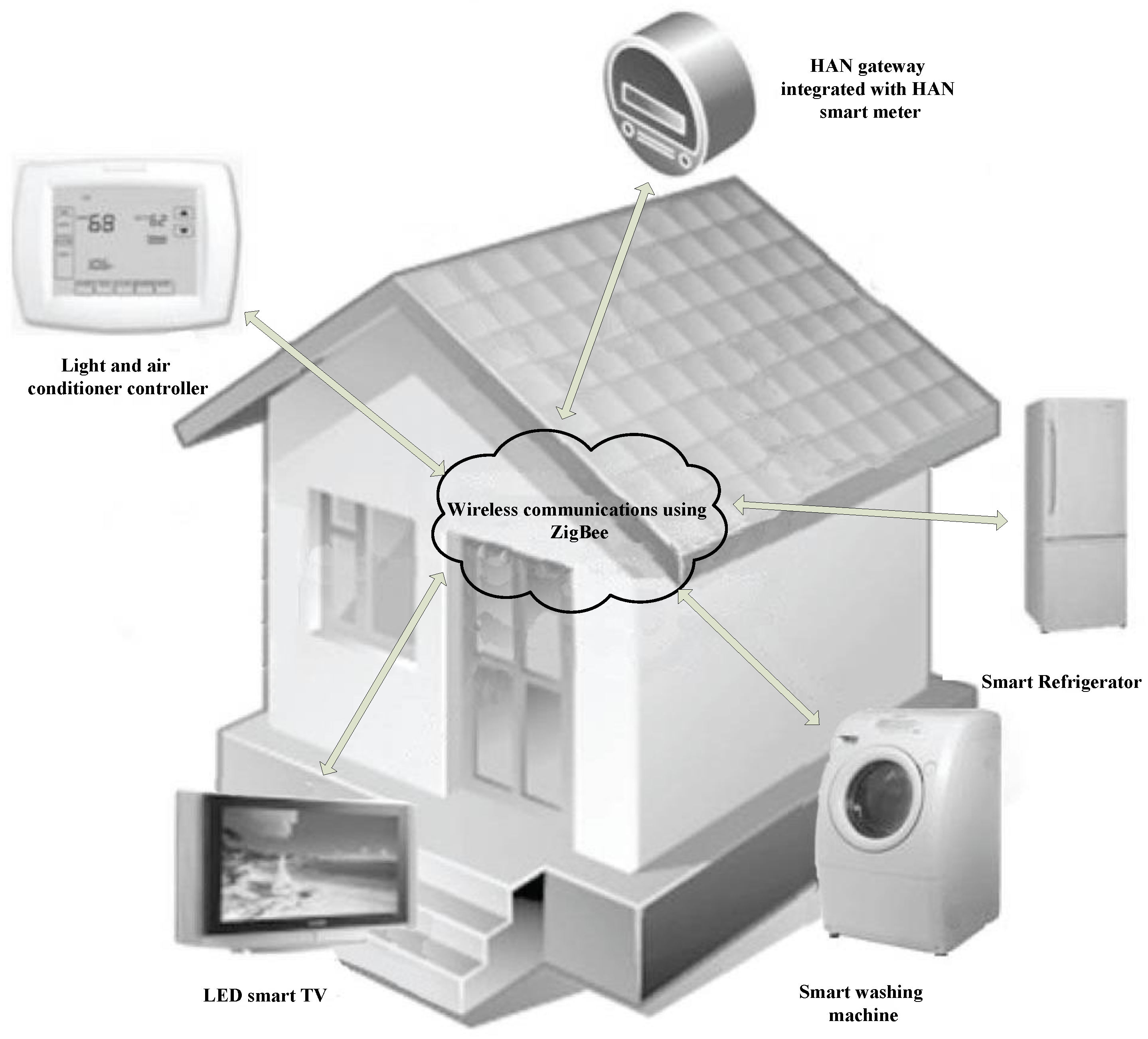
We assume that the smart home consists of four sensors embedded in four appliances such as a smart refrigerator, smart light and air conditioner controller, smart washing machine and smart TV. These sensors operate over the 2.4 GHz ISM band to communicate with a smart home gateway that is integrated with the smart meter using a star topology. The proposed network is depicted in
Figure 4. These sensors consume 8 mA in start-up mode and 19.7 mA when the sensor is in communication mode [
70]. 802.15.4/ZigBee can support a low sampling rate from 0 to 250 Hz [
71]. This can satisfy the requirements of the smart grid. The BER in normal status has a value of 0.0004 [
72]. By knowing these values and the other values such as the IEEE 802.15.4 physical and MAC headers, we can measure the objective functions (Equations from (8) to (19)). We focused on minimizing both the network end-to-end delay and end-to-end latency and also maximizing both network energy efficiency and packet throughput by changing the packet payload size. Packet payload size plays a significant role in determining the optimal value of these features, which if the packet payload size increases, the network delay will be increased and the energy efficiency will be decreased.
We compile the JMetal 4.5 tool in NetBeans IDE 8.0.2 by using the Java version. The test environment is a 3 GB RAM, Intel dual-core CPU-T3200, running Windows 7.
Table 9 summarizes the parameters of all the optimization algorithms that are used in this study. Most of these parameters and settings are assigned as recommended in [
15,
53]. On the other hand,
Table 10 summarizes the parameters needed to evaluate the network modelling part. The procedure of maximizing both network energy efficiency and packet throughput, and minimizing both the network end-to-end delay and end-to-end latency are summarized for each algorithm in
Figure 5,
Figure 6,
Figure 7 and
Figure 8.
The procedure of OMOPSO, summarized in
Figure 5, begins by initializing the parameter of packet payload size that varies from 0 to 114 bytes based on the IEEE 802.15.4 data frame. After that, the algorithm performs the archive on the leaders and crowding operator on the elected leaders. The algorithm checks the state of the size of the leaders in which, if their size greater than the required size, the algorithm keeps the best leaders and eliminates the others. Hence, the velocity update rule comes to take place on the procedure, where is applied to each member of the population, after that, it performs the mutation operation. Moreover, the algorithm evaluates the objective functions (Equations from (8) to (19)), which uses the population members to minimize both the network end-to-end delay and end-to-end latency and also to maximize both energy efficiency and network throughput. In addition, the algorithm compares the new fitness of each individual with its old fitness value. The algorithm stores the new fitness just in case of the new one is better than the old. Then, the algorithm updates the leaders of the new generation of the population follows by archiving and crowding operators on the leaders. Finally, the algorithm checks the number of iterations. If the maximum generations (the value of 250 generations as in
Table 9) is reached the algorithm will terminate, otherwise, the algorithm will repeat the past steps.
The procedure of NSGA-II, depicted in
Figure 6, begins by initializing the packet payload size parameter. The lower limit and upper limit of this parameter are 0 byte and 114 bytes based on the IEEE 802.15.4 data frame, respectively. Based on the first population of this parameter, the algorithm evaluates the objective functions (Equations from (8) to (19)), which minimizes both the network end-to-end delay and end-to-end latency, and also maximizes both power efficiency, and network throughput. Moreover, the algorithm ranks the population based on non-dominated solutions and performs selection, crossover, and mutation operations to generate new population (child population). Based on the results of the previous steps, the algorithm uses the child population to evaluate the same objective functions. After that, the algorithm combines the child population with the old population. Later, it ranks the produced populations from the best to worst results. At the end, the algorithm checks on the number of iterations, in case it more than the maximum number of iterations (the value of 250 generations as in
Table 9), the algorithm will terminate.
Based on
Figure 7, we can summarize the procedure of SPEA2 as follows: the algorithm begins the procedure by initializing the packet payload value, which is varied in the range of 0 to 114 bytes based on the IEEE 802.15.4 data frame. After that, SPEA2 uses the first population to evaluate the objective functions to minimize the network end-to-end delay and end-to-end latency and also maximize the network throughput and energy efficiency. Hence, the algorithm uses the values of the fitness function to perform the selection operator. After selection, the algorithm generates the mating pool. This pool is a set of population that both mutation and crossover operations are applied on them in order to generate a new population.
At the end, the algorithm checks the number of iterations, which in case it reaches the maximum generations (the value of 250 generations as in
Table 9), the algorithm will terminate, and else, the algorithm will repeat the previous steps.
Like OMOPSO, NSGA-II and SPEA2, MOSFP begins the procedure by initializing the packet payload size parameter, which is varied in the range of 0 to 114 bytes based on the IEEE 802.15.4 data frame (see
Figure 8). After that, the algorithm archives the required number of winners. Then, it groups the winners based on the crowding operation. In the case of the size of the winners is greater than the defined maximum size of winners, the algorithm keeps the best winners and eliminates the other winners. Hence, it applies the velocity update rule on each individual of the population. In addition, it performs mutation to prepare the population for evaluation. In the evaluation part, MOSFP uses the population to minimize both the end-to-end delay and end-to-end latency of the network and to maximize both the energy efficiency and packet throughput. The algorithm changes the fitness value of each individual just in the case of the new fitness value of the individual is better than the old one. Later on, the algorithm updates the set of winners, after that, it performs archiving and crowding operators on the winners. At the end, if the number of maximum generations is not reached (the value of 250 generations as in
Table 9), the algorithm will repeat the prior steps, else, the algorithm will terminate.
7. Experimentation and Results
In this study, the experimental results are analyzed in two ways. First, the outcomes from each algorithm for four objective functions based on ten runs are analyzed using one-way ANOVA (Tukey’s test). In this test, the mean difference between the algorithms is significant if the p-value is smaller than 0.05.
Second, the Pareto front set that obtained by the four algorithms is analyzed for the four objective functions. The Pareto front is very important to illustrate the trade-offs between a set of optimization functions (objective functions). From the Pareto observation, we can know the optimal value of packet payload size that achieves the optimal values for a set of conflict objective functions.
7.1. Comparisons between the Four Algorithms Using Statistical Analysis
Table 11 summarizes the objective functions, namely, energy efficiency, packet throughput, end-to-end delay and end-to-end latency, from ten runs for each algorithm. The statistical analysis using one-way ANOVA (Tukey’s test) outlined in
Table 12 shows that MOSFP significantly outperforms SPEA2 in which, MOSFP substantially increase the energy efficiency (0.116,
p ≤ 0.001) and packet throughput (0.394,
p ≤ 0.001), and decrease the end-to-end delay (−0.265,
p ≤ 0.001) and end-to-end latency (−2.718,
p ≤ 0.001) compared to SPEA2. These mean differences also represent that MOSFP outperforms SPEA2 by 41%, 99%, 24% and 41% in term of energy efficiency, packet throughput, end-to-end delay and end-to-end latency respectively. However, no significant mean difference is observed between MOSFP and the rest of the algorithms i.e., OMOPSO and NSGA-II for all objective functions. This indicates that MOSFP outperforms OMOPSO and NSGA-II with a small mean difference between them in the range of 2% to 9%.
Another aspect that will be highlighted in this sub-section is the consistency of the algorithm to perform between runs. A more stable algorithm will result in a smaller standard deviation of the objective function. From the experiments, SPEA2 has results in a more consistent performance for three objective functions between runs among the algorithms. The standard deviations of SPEA2 are approximately 3%, 23% and 7% much smaller compared to others for energy efficiency, packet throughput, and end-to-end delay respectively. In end-to-end latency, MOSFP has shown a more consistent performance where its standard deviations are 8%, 4% and 3% smaller than SPEA2, OMOPSO and NSGA-II, respectively.
Overall, the MOSFP algorithm obtained the best average of all objective functions while the OMOPSO algorithm is in the second, followed by NSGA-II and SPEA2. In terms of performance consistency, the SPEA2 results are shown to be more consistent in energy efficiency, packet throughput, and end-to-end delay whereas MOSFP is shown to be more consistent in end-to-end latency.
7.2. Analysis of Pareto-Optimal Set of the Four Algorithms
As we introduced previously, the multi-objective optimization problems are a set of conflict optimization objective functions that consist of minimization and maximization functions. Pareto optimality concept is emerged to manage the trade-offs between these objectives. This concept is proposed by Vilfredo Pareto in 1906 [
73]. Pareto optimality operates mainly based on the Pareto front set, which is used to balance the conflict objective functions. Based on the Pareto front of each objective function, two concepts should be defined as follows:
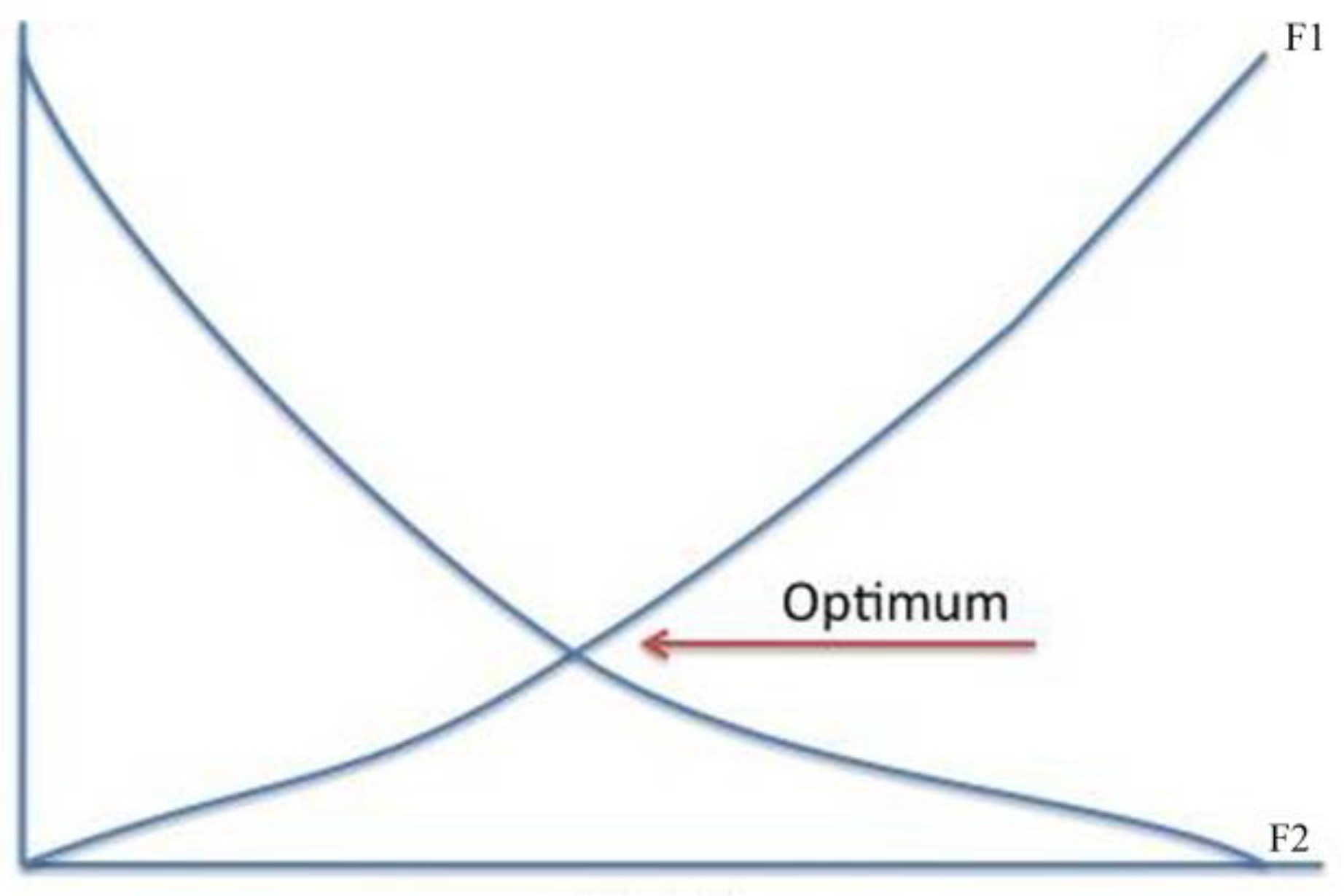
- (a)
The Marginal concept of optimality: the optimal value based on this concept can be illustrated by the intersection points between a set of objective functions, which some of them minimization and the others are maximization [
74].
Figure 9 presents the optimum value based on the intersection between two objective functions [
75].
- (b)
The knee point: is a point on the Pareto front curve, which is referred to the most preferred solution. Knee point can be estimated by determining the greatest reflex angle that bends of the front from its left to its right or vice-versa. Based on
Figure 10 [
76], three points called A, B, and C are used to illustrate the knee point concept. The B point is considered as the knee point, which makes the greatest reflex angle between C point on the right side of the front and the A point on the left side of the front.
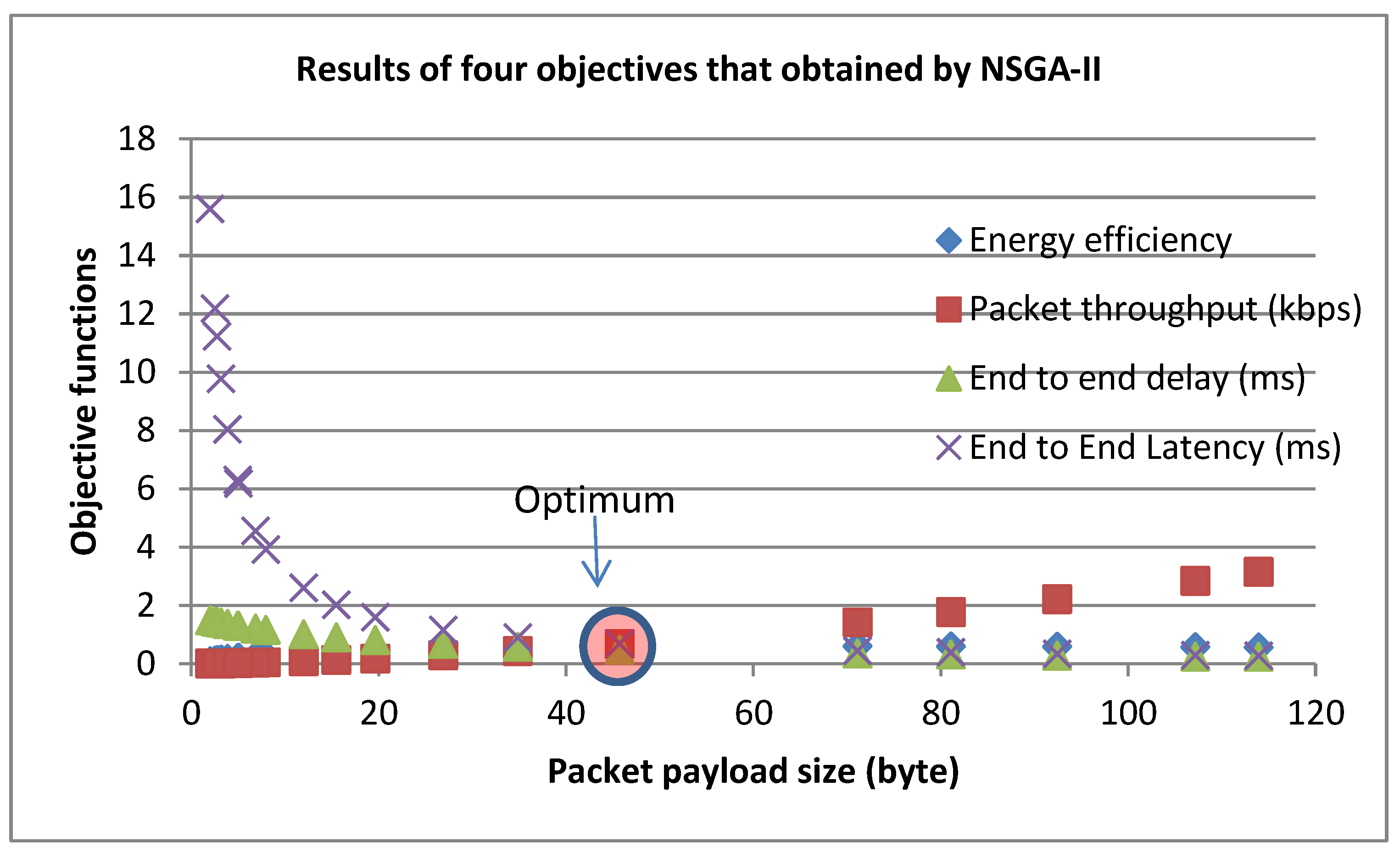
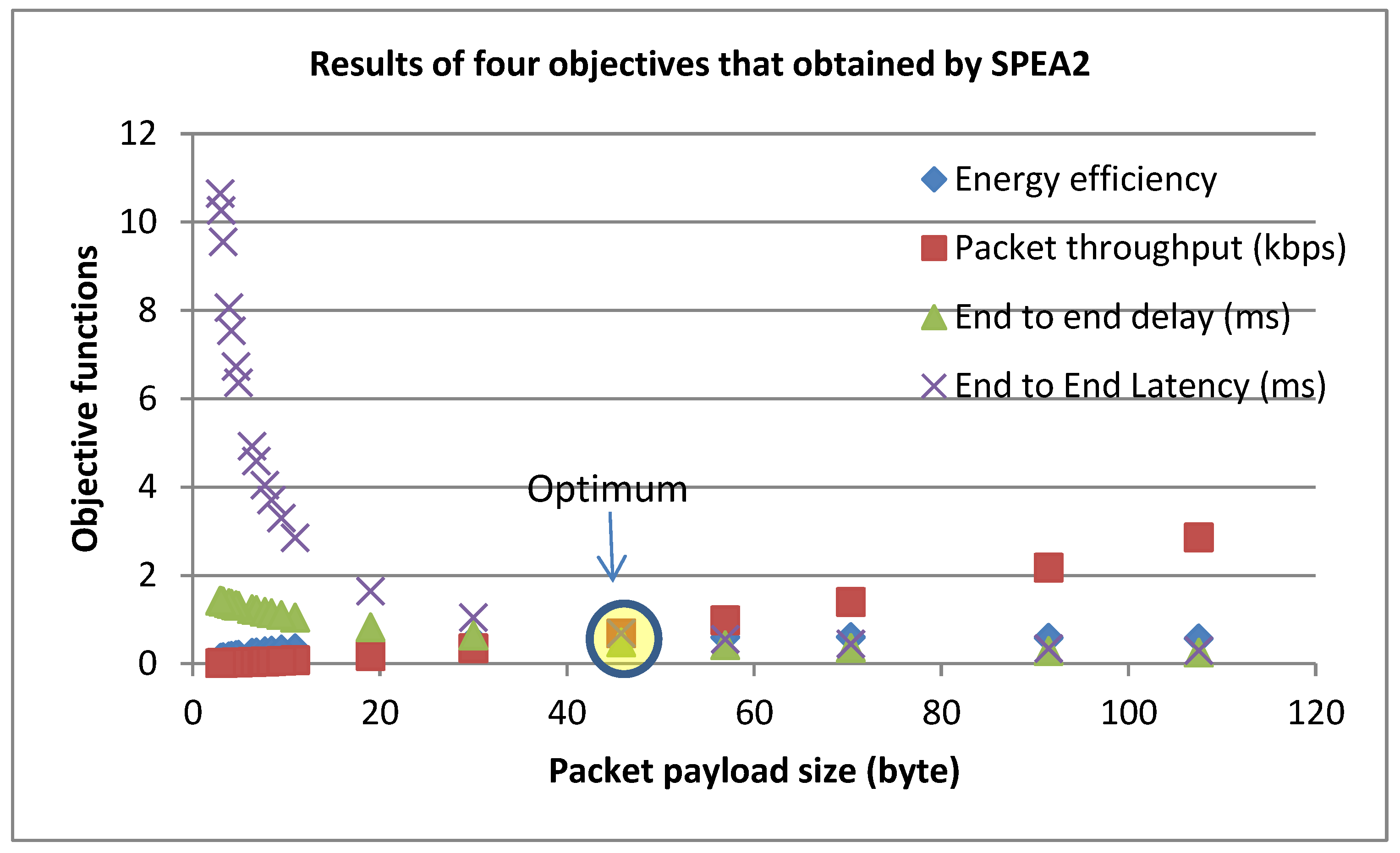
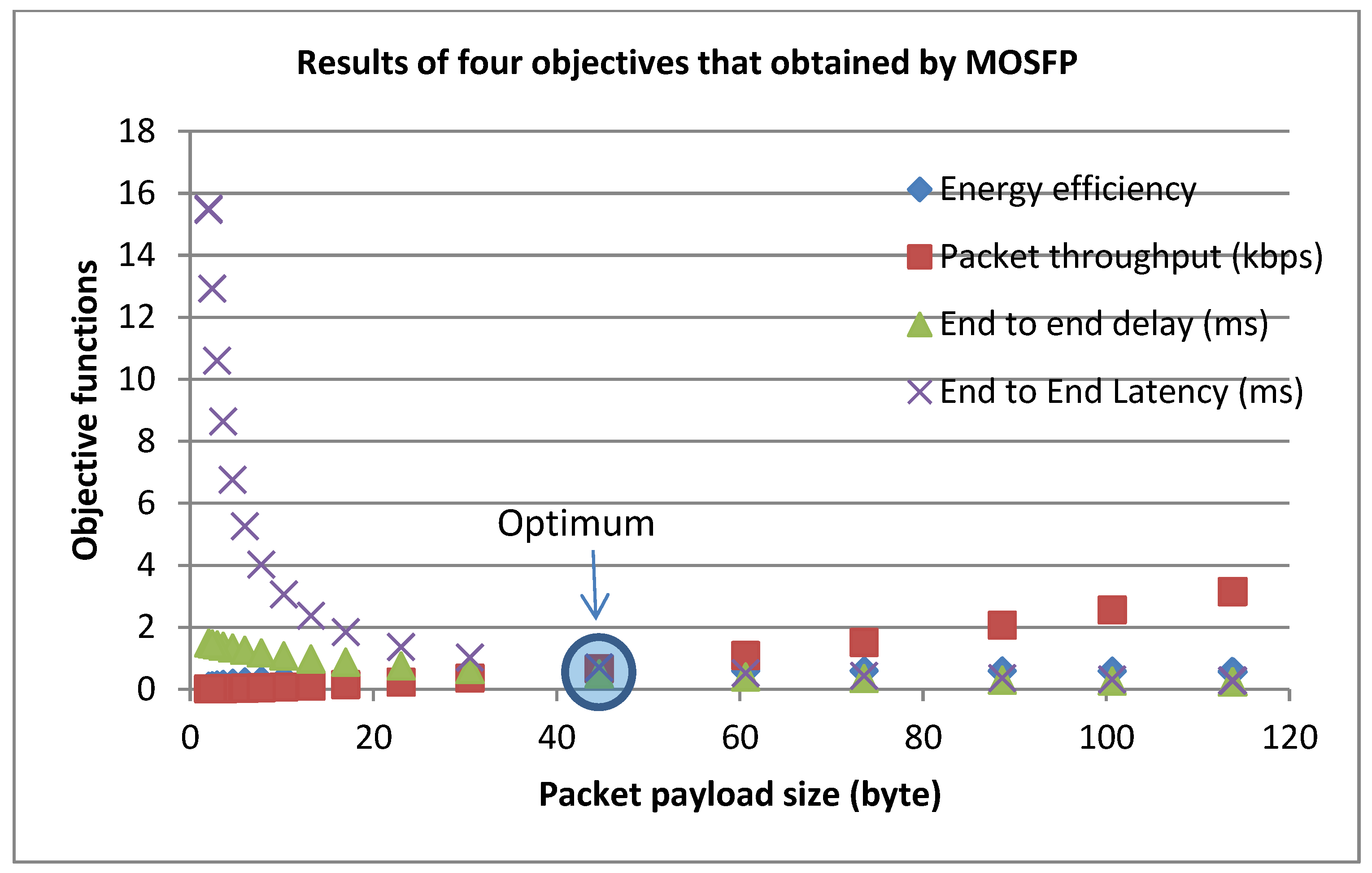
Figure 11,
Figure 12,
Figure 13 and
Figure 14 show a sample of optimizing the four objective functions denoted by maximizing both energy efficiency and packet throughput and also minimizing both end-to-end delay and end-to-end latency using four algorithms. These algorithms are MOSFP, OMOPSO, NSGA-II, and SPEA2. From the results, the value of end-to-end latency decreases sharply and end-to-end delay decreases slightly until the value of packet payload size reaches 45 bytes, after that, both of them stabilize below 2 when the packet payload size is beyond 45 bytes. On the other hand, the packet throughput increases slightly until the value of packet payload size reaches 45 bytes, after that, it increases dramatically until the value of packet payload size reaches 114 bytes. Furthermore, the energy efficiency increases slightly until the value of packet payload size reaches 45 bytes, after that, it stabilizes above the 0.5 when the packet payload size increases more than 45 bytes. From the figures, we can notice that the optimum points are represented by different colors (i.e., green, red, yellow and blue), which are the intersection points of all the objective functions. These points are created when the packet payload size equal to 45 bytes.
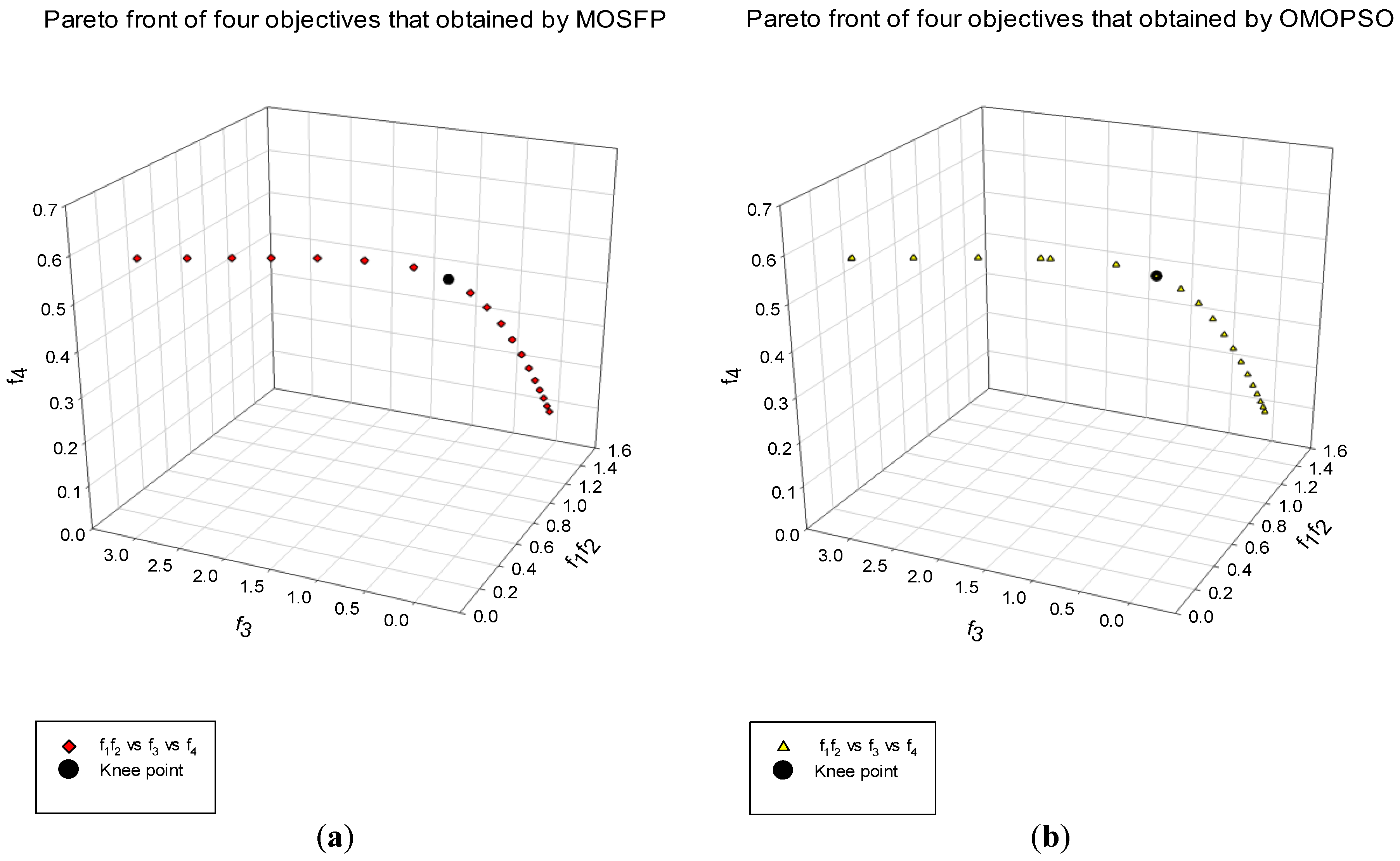
Figure 15 presents the Pareto optimal front obtained from all the algorithms at the end of 250 generations where f
1 represents the end-to-end delay, f
2 represents the end-to-end latency, f
3 represents the network throughput, and f
4 represents the energy efficiency. Both MOSFP and OMOPSO produce 19 non-dominated solutions related to the Pareto front, while both NSGA-II and SPEA2 produce 18 non-dominated solutions for the same objective functions. This proves the ability of MOSFP which obtained 19 values of getting good results, compared to SPEA2 and NSGA-II. In addition, MOSFP has the best spread and distribution of solutions related to the true Pareto front while the OMOPSO is in the second followed by NSGA-II and SPEA2 as outlined in
Figure 15.
Based on
Figure 7, we can summarize the procedure of SPEA2 as follows: the algorithm begins the procedure by initializing the packet payload value, which is varied in the range of 0 to 114 bytes based on the IEEE 802.15.4 data frame. After that, SPEA2 uses the first population to evaluate the objective functions to minimize the network end-to-end delay and end-to-end latency and also maximize the network throughput and energy efficiency. Hence, the algorithm uses the values of the fitness function to perform the selection operator. After selection, the algorithm generates the mating pool. This pool is a set of population that both mutation and crossover operations are applied on them in order to generate a new population.
8. Conclusions
In this paper, we study the problems of smart grid applications, especially in HANs, which utilize a wide variety of sensor-based devices that operate using short-range communication technologies such as IEEE 802.15.4. In addition, these sensors operate using batteries. The misuse of these devices will decrease the lifetime of the network and lead to a rapid node death. For this reason, this paper uses a theoretical analysis to mitigate these problems using our proposed algorithm (MOSFP) along with three well-known algorithms in the multi-objective optimization field, namely OMOPSO, NSGA-II, and SPEA2. These algorithms have been used to optimize four network features that are used to evaluate the QoS of the network. These features consist of network end-to-end delay, end-to-end latency, network throughput, and energy efficiency. The parameter of a physical layer such as packet payload size is considered to maximize both network throughput and energy efficiency, and also to minimize both the network end-to-end delay and end-to-end latency. The results have been reported using two different ways. In a first way, the statistical analysis of one-way ANOVA (Tukey’s test) between the algorithms is conducted for each objective function based on ten-time runs. In a second way, a sample of the Pareto-optimal set of each algorithm has been analyzed using the knee point and intersection point concepts.
The mean difference from one-way ANOVA (Tukey’s test) indicates that our algorithm (MOSFP) significantly outperformed SPEA2 in optimizing the proposed features while no significant mean difference is observed between MOSFP and, OMOPSO and NSGA-II. However, the overall performance of MOSFP outperformed OMOPSO, NSGA-II and SPEA2 by 3%, 6% and 51%, respectively. Furthermore, MOSFP found the best average value of energy efficiency feature compared with the other algorithms, which is very important to increase the lifetime of the network. In the second test, the Pareto front results illustrated that MOSFP algorithm, which has a good spread and approximation of the true Pareto front of the proposed network features, outperformed the other algorithms. This is very clear with the Pareto front of MOSFP in
Figure 15, which obtained on 19 non-dominated solutions related to Pareto front rather than NSGA-II, and SPEA2. Furthermore, we can notice that MOSFP has the best spread and distribution of solutions related to the true Pareto front while the OMOPSO is in the second, followed by NSGA-II and SPEA2, as summarized in
Figure 15. Overall, the knee point and the intersection point of all the Pareto-optimal sets for all the algorithms illustrated that the optimal value of packet payload size is equal to 45 bytes, a value which manages a trade-off between the maximization and minimization objective functions. This paper takes the smart grid as the case study as this network is affected by end-to-end delay, especially in dense cities.
The objective functions in this paper may have their limitations. Other variables may exist in real implementation that may affect the outcome of the studies. Therefore, the value of the payload size resulting from the experiment should be tested in real environmenta in the future to ensure the reliability of the proposed method. Finally, one aspect that we would like to explore in the future is the hybridization between our algorithm (MOSFP) and other algorithms such as genetic algorithms to increase the algorithm convergence and we will use it to optimize some problems related to data aggregation [
77,
78] in WSNs.

 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}