Reserve Allocation of Photovoltaic Systems to Improve Frequency Stability in Hybrid Power Systems



Abstract
:1. Introduction
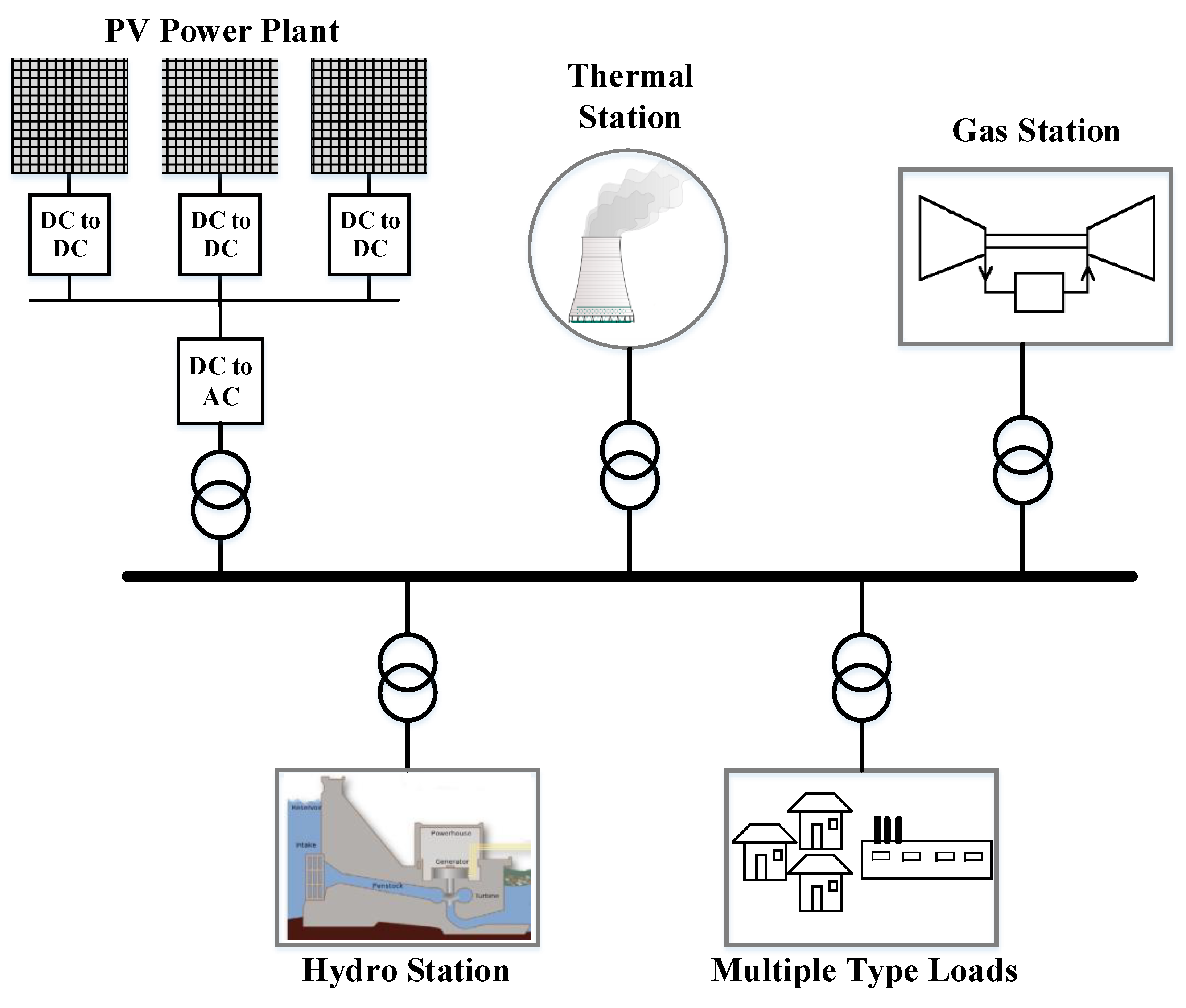
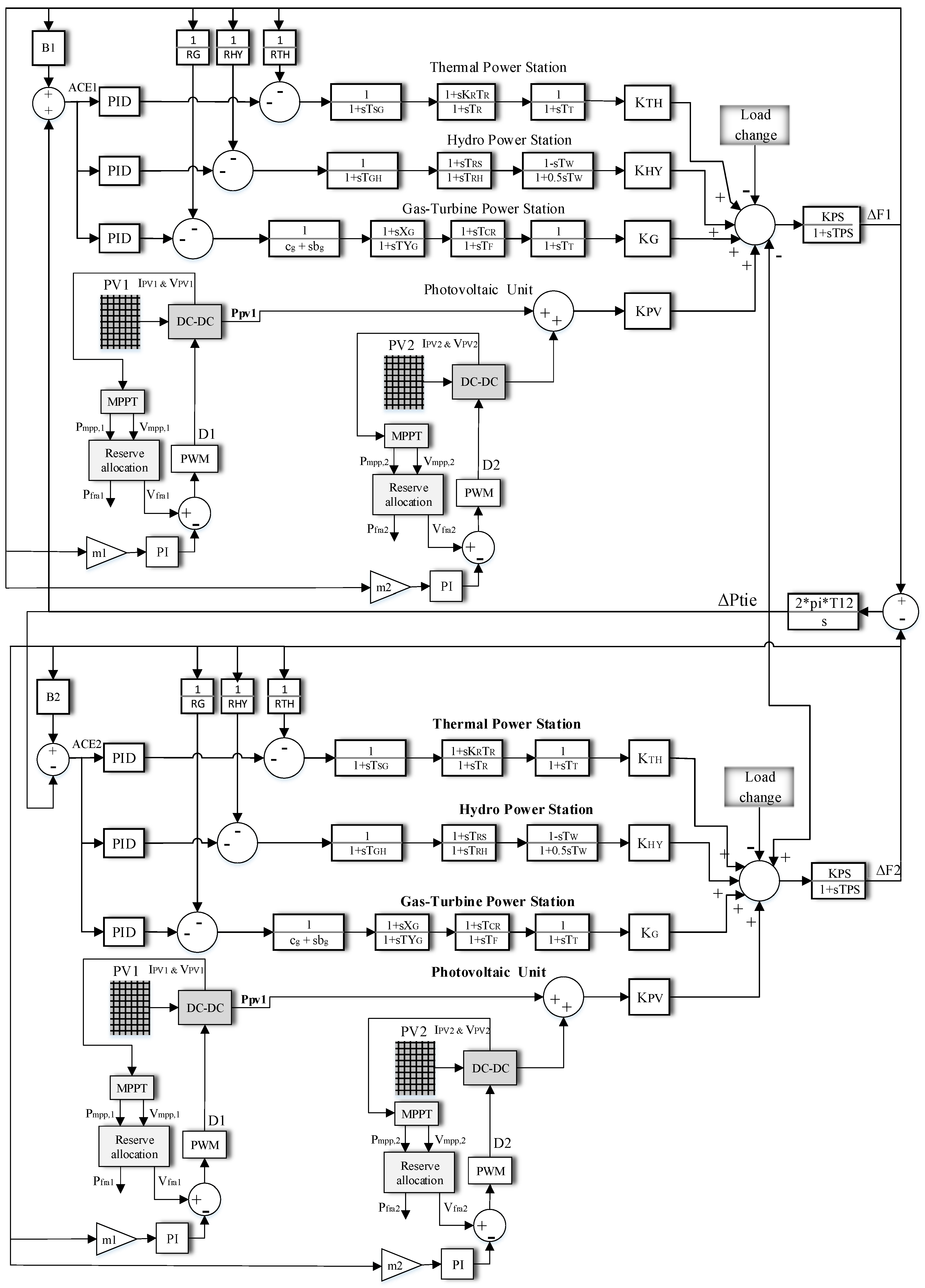
2. System under Study
3. The Contribution of PV in the Control of Frequency
3.1. The Control of Frequency
3.2. Evaluation of PV Contribution for the Control of Frequency
3.2.1. PV Deployment in Island Microgrids
3.2.2. Networks Characterized by High Levels of PV Contribution
3.3. Reserve Allocation of PV Modules to Contribute to Frequency Control
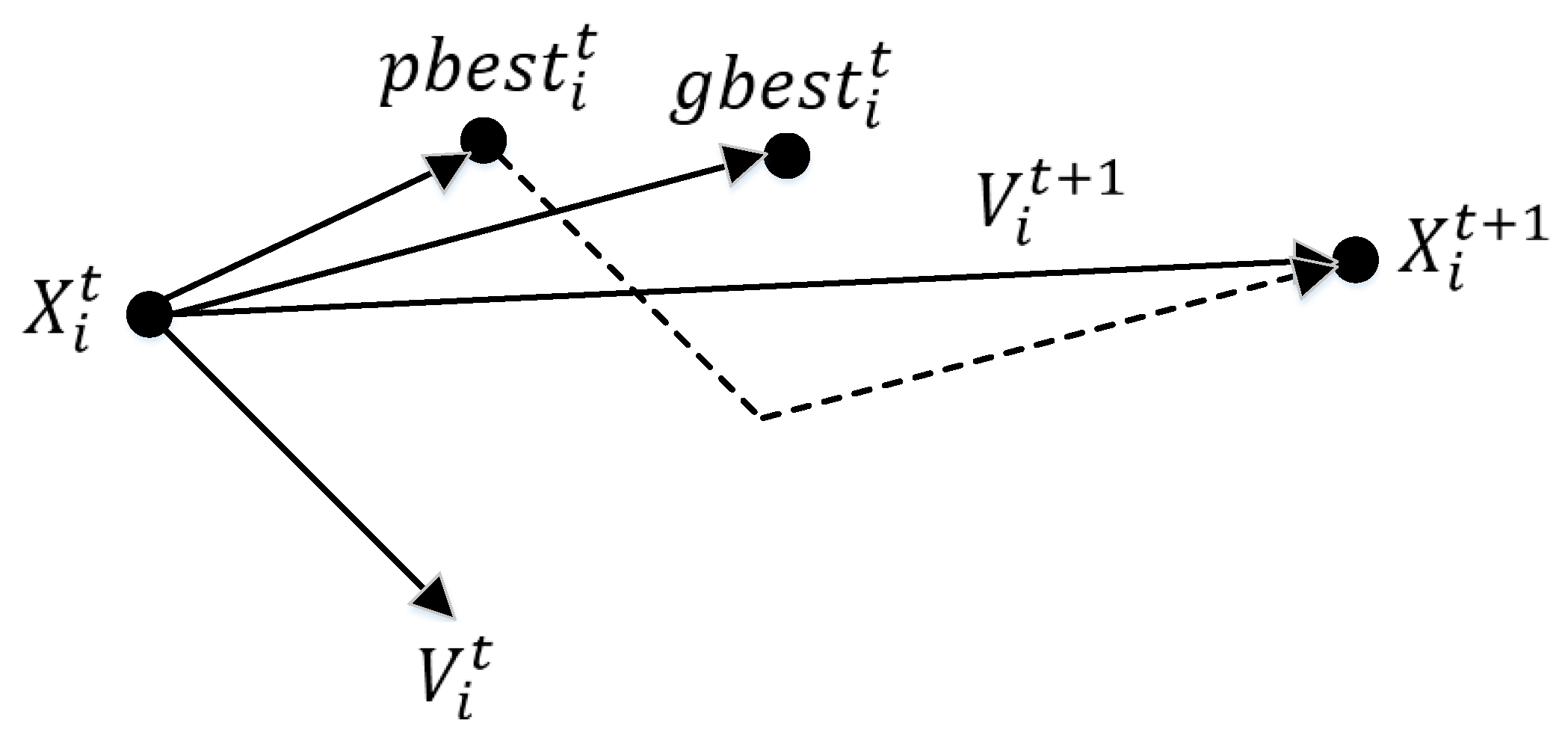
3.3.1. Particle Swarm Optimization
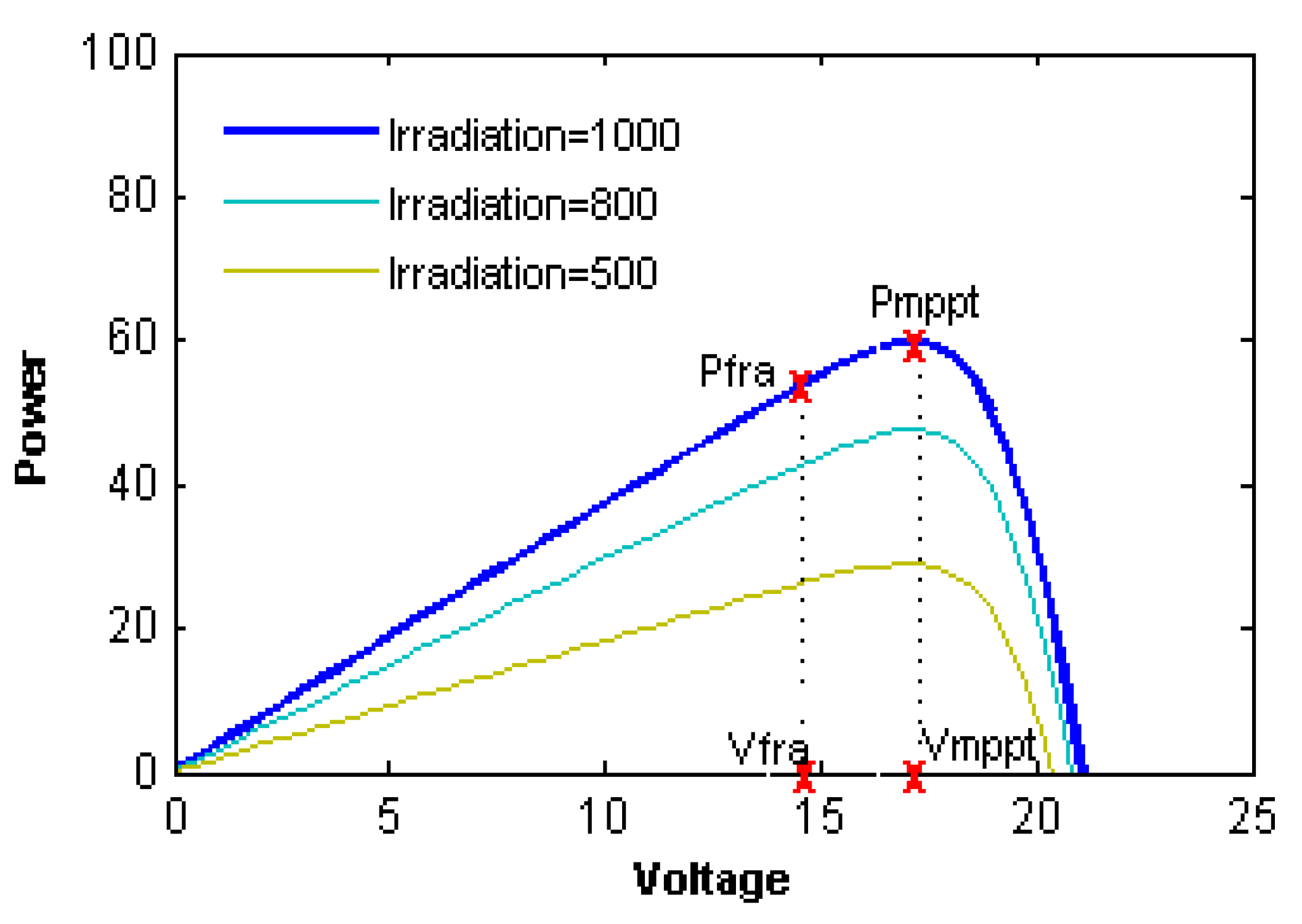
3.3.2. Reserve Allocation for the PVs
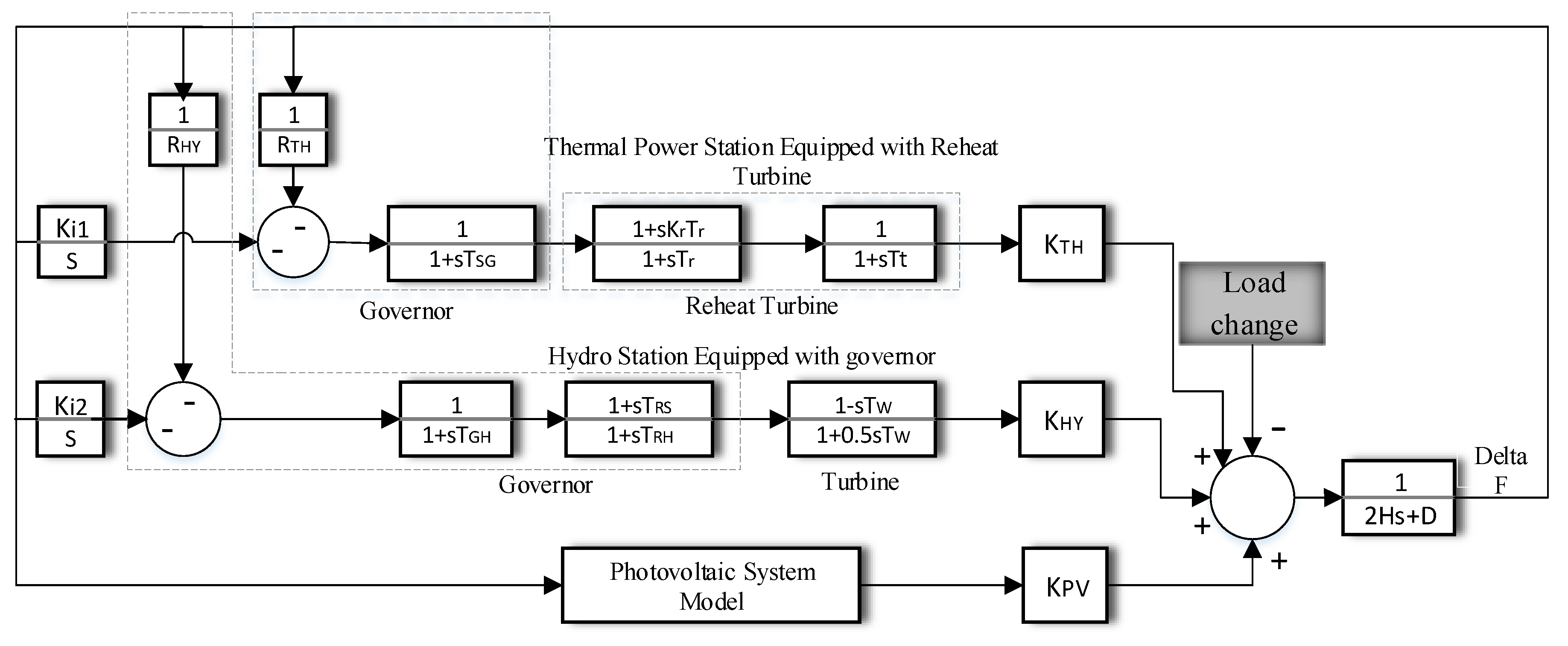
4. Modeling
4.1. Simulation Analysis
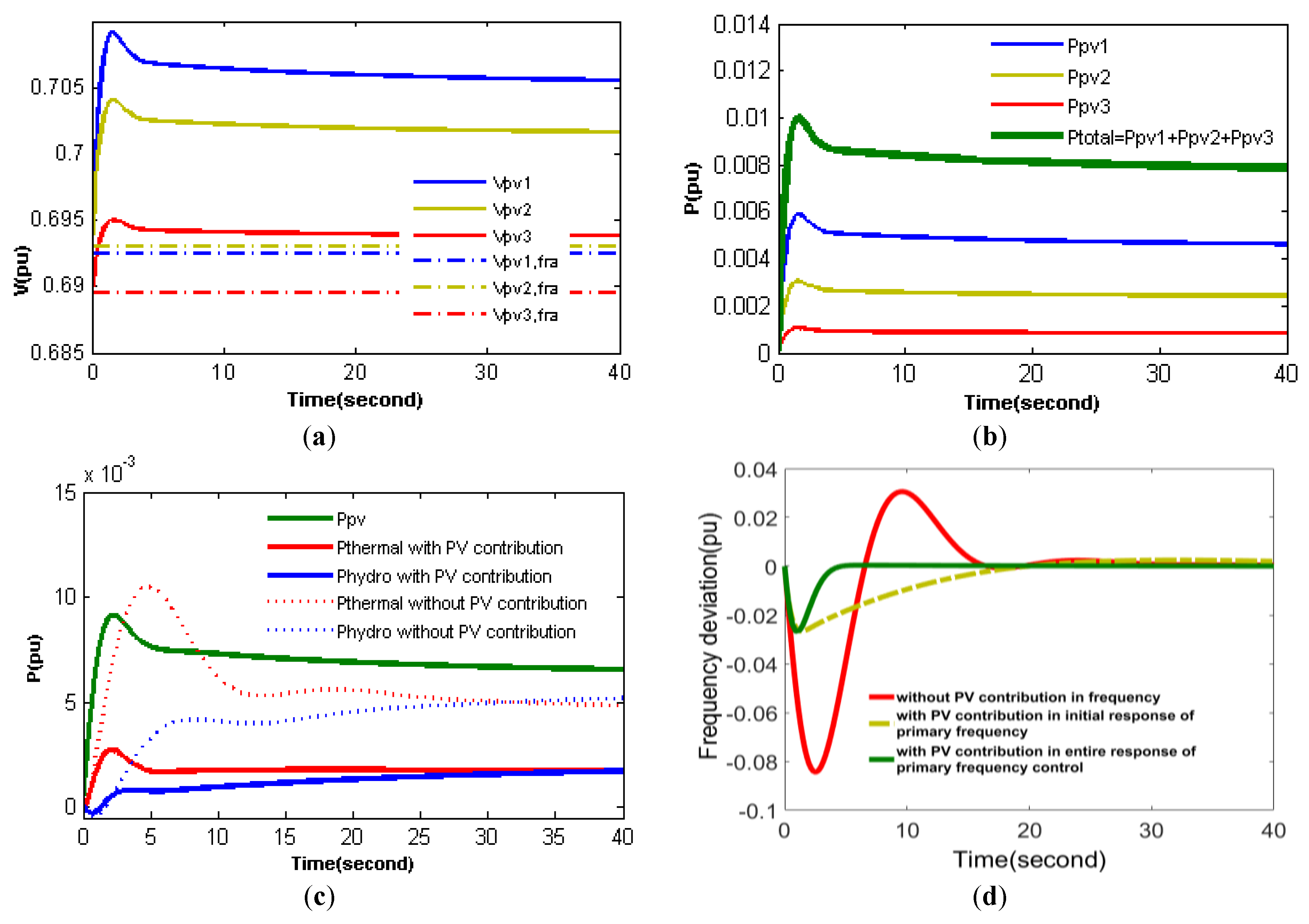
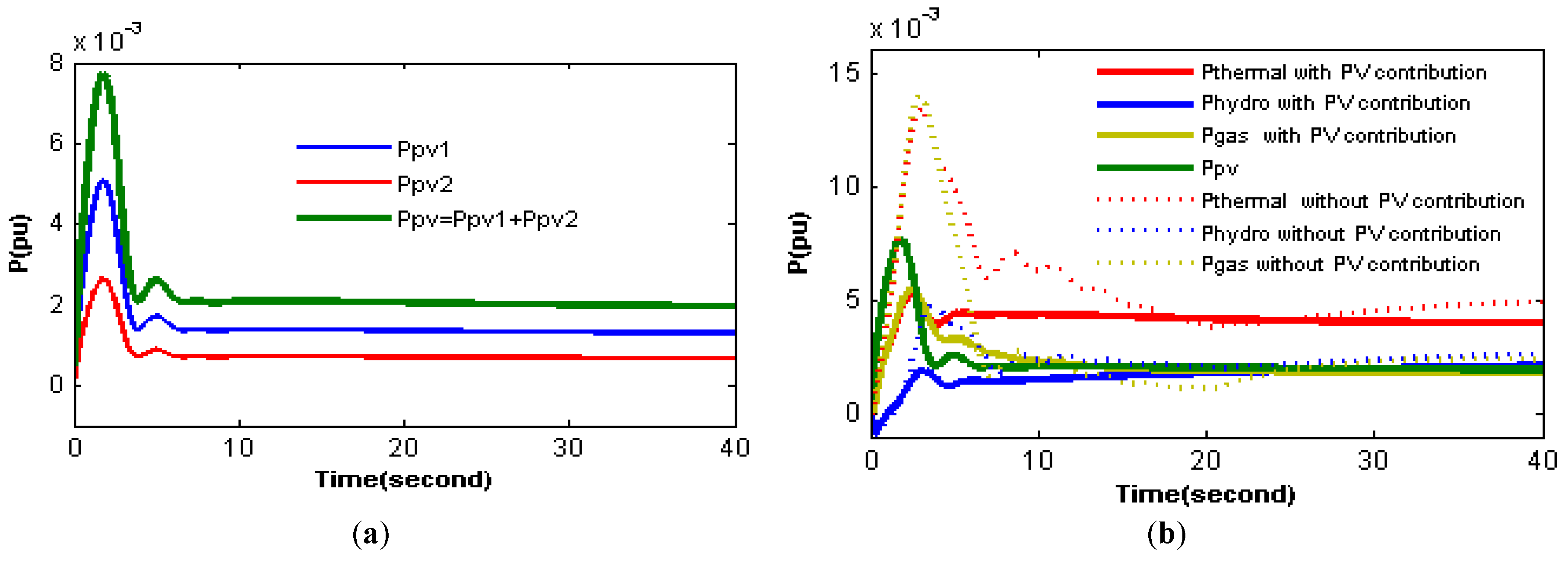
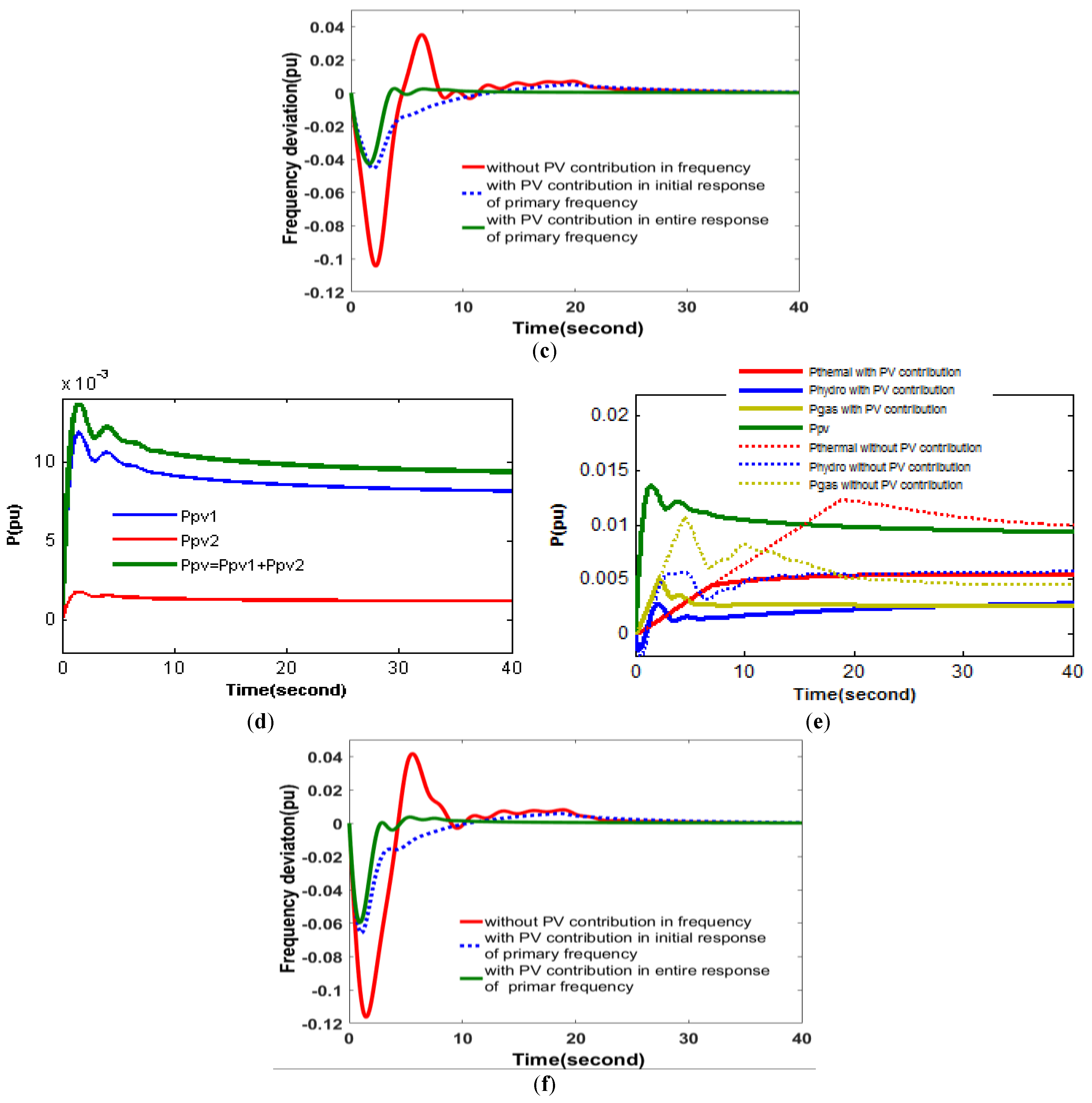
4.2. PV System Involvement in Initial Response of Primary Frequency Control
4.3. PV System Involvement throughout Entire Primary Frequency Control
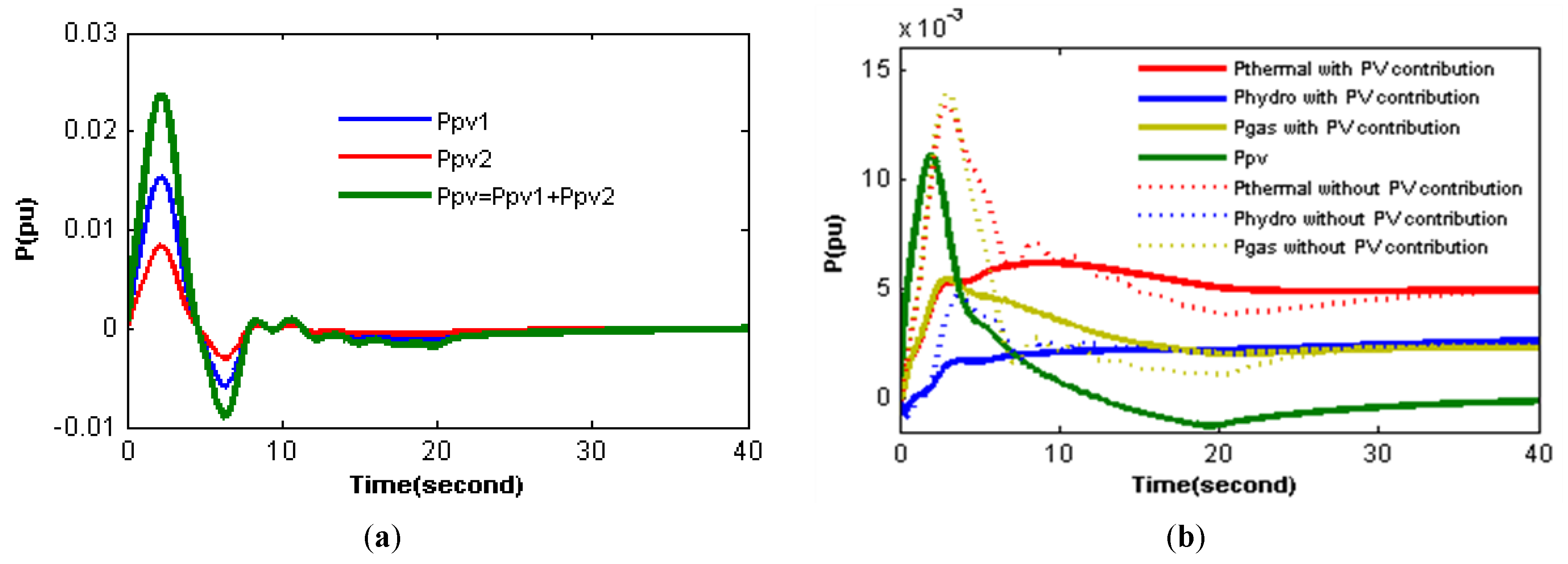
5. Development to a Two-Area Power System
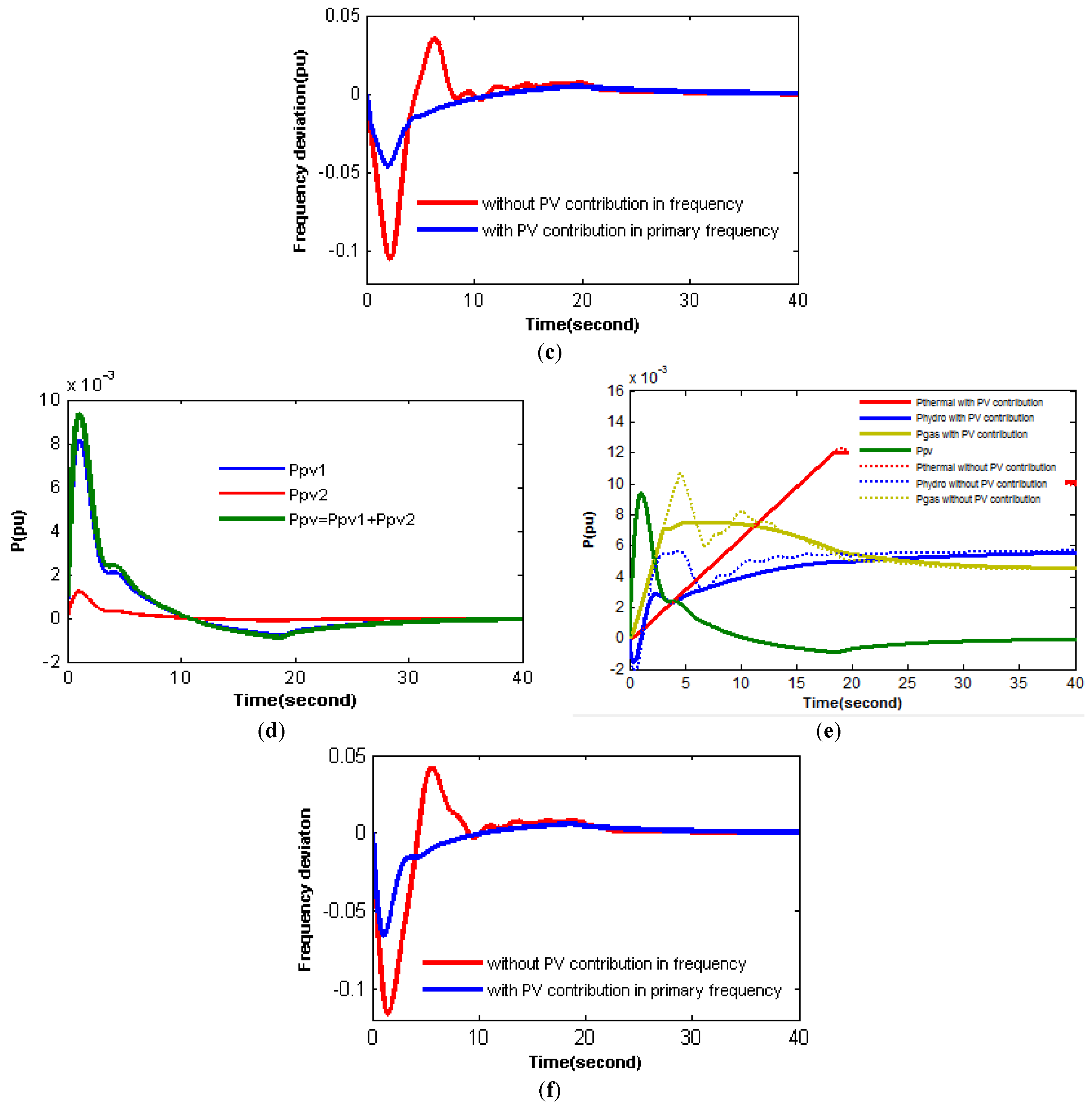
5.1. The Contribution of PV System in the Initial Response of Primary Frequency Control
5.2. The Contribution of the PV System throughout Entire Primary Frequency Control
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| ACE | area control error |
| Prt | rated capacity of the area, MW |
| f | nominal system frequency, Hz |
| D | system damping of area, pu MW/Hz |
| TSG | speed governor time constant, s |
| TT | steam turbine time constant, s |
| TPS | power system time constant, s |
| RTH | governor speed regulation parameters of thermal unit |
| RHY | governor speed regulation parameters of hydro unit Hz/pu MW |
| RG | governor speed regulation parameters of gas unit, Hz/pu MW |
| KPS | power system gain, Hz/pu MW |
| KR | steam turbine reheat constant |
| TR | steam turbine reheat time constant, s |
| TW | nominal starting time of water in penstock, s |
| TRS | hydro turbine speed governor reset time, s |
| TRH | hydro turbine speed governor transient droop time constant, s |
| TGH | hydro turbine speed governor main servo time constant, s |
| XG | lead time constant of gas turbine speed governor, s |
| YG | lag time constant of gas turbine speed governor, s |
| cg | gas turbine valve positioner |
| bg | gas turbine constant of valve positioner, s |
| TF | gas turbine fuel time constant, s |
| TCR | gas turbine combustion reaction time delay, s |
| TCD | gas turbine compressor discharge volume-time constant, s |
| n | the number of modules in the PV system |
| the maximum power of each module | |
| fractional power of each module | |
| reserve power of each module | |
| total reserve for all modules |
Appendix A
| s | |
References
- Saeed Uz Zaman, M.; Bukhari, S.B.A.; Hazazi, K.M.; Haider, Z.M.; Haider, R.; Kim, C.H. Frequency response analysis of a single-area power system with a modified lfc model considering demand response and virtual inertia. Energies 2018, 11, 787. [Google Scholar] [CrossRef]
- Rahman, M.M.; Chowdhury, A.H.; Hossain, M.A. Improved load frequency control using a fast acting active disturbance rejection controller. Energies 2017, 10, 1718. [Google Scholar] [CrossRef]
- Tavakoli, M.; Pouresmaeil, E.; Adabi, J.; Godina, R.; Catalão, J.P.S. Load-frequency control in a multi-source power system connected to wind farms through multi terminal HVDC systems. Comput. Oper. Res. 2018, 96, 305–315. [Google Scholar] [CrossRef]
- Bevrani, H.; Ghosh, A.; Ledwich, G. Renewable energy sources and frequency regulation: Survey and new perspectives. IET Renew. Power Gener. 2010, 4, 438–457. [Google Scholar] [CrossRef]
- Acharya, S.; Moursi, M.S.E.; Al-Hinai, A. Coordinated frequency control strategy for an islanded microgrid with demand side management capability. IEEE Trans. Energy Convers. 2018, 33, 639–651. [Google Scholar] [CrossRef]
- Balamurugan, M.; Sahoo, S.K.; Sukchai, S. Application of soft computing methods for grid connected PV system: A technological and status review. Renew. Sustain. Energy Rev. 2017, 75, 1493–1508. [Google Scholar] [CrossRef]
- Salam, Z.; Ahmed, J.; Merugu, B.S. The application of soft computing methods for MPPT of PV system: A technological and status review. Appl. Energy 2013, 107, 135–148. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. A Power Management Strategy for PV/Battery Hybrid Systems in Islanded Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 870–882. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. Strategies for independent deployment and autonomous control of pv and battery units in islanded microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 742–755. [Google Scholar] [CrossRef]
- Marinic-Kragic, I.; Nizetic, S.; Grubisic-Cabo, F.; Papadopoulos, A. Analysis of flow separation effect in the case of the free-standinf photovoltaic panel exposed to various operating conditions. J. Clean. Prod. 2018, 174, 53–64. [Google Scholar] [CrossRef]
- Hoke, A.F.; Shirazi, M.; Chakraborty, S.; Muljadi, E.; Maksimovic, D. Rapid active power control of photovoltaic systems for grid frequency support. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1154–1163. [Google Scholar] [CrossRef]
- Sekhar, P.C.; Mishra, S. Storage free smart energy management for frequency control in a diesel-PV-fuel cell-based hybrid AC microgrid. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1657–1671. [Google Scholar] [CrossRef] [PubMed]
- Mahmood, H.; Michaelson, D.; Jiang, J. Decentralized power management of a PV/battery hybrid unit in a droop-controlled islanded microgrid. IEEE Trans. Power Electron. 2015, 30, 7215–7229. [Google Scholar] [CrossRef]
- Kewat, S.; Singh, B.; Hussain, I. Power management in PV-battery-hydro based standalone microgrid. IET Renew. Power Gener. 2018, 12, 391–398. [Google Scholar] [CrossRef]
- Shuvra, M.A.; Chowdhury, B.H. Frequency regulation using smart inverters in high penetration distributed PV scenario. In Proceedings of the 2018 9th IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Charlotte, NC, USA, 25–28 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Jafarian, H.; Cox, R.; Enslin, J.H.; Bhowmik, S.; Parkhideh, B. Decentralized active and reactive power control for an AC-stacked PV inverter with single member phase compensation. IEEE Trans. Ind. Appl. 2018, 54, 345–355. [Google Scholar] [CrossRef]
- Liao, S.; Xu, J.; Sun, Y.; Bao, Y.; Tang, B. Wide-area measurement system-based online calculation method of PV systems de-loaded margin for frequency regulation in isolated power systems 2018. IET Renew. Power Gener. 2018, 12, 335–341. [Google Scholar] [CrossRef]
- Hoke, A.; Maksimović, D. Active power control of photovoltaic power systems. In Proceedings of the 2013 1st IEEE Conference on Technologies for Sustainability (SusTech), Portland, OR, USA, 1–2 August 2013; pp. 70–77. [Google Scholar]
- Datta, M.; Senjyu, T.; Yona, A.; Funabashi, T.; Kim, C. A Frequency-control approach by photovoltaic generator in a PV–diesel hybrid power system. IEEE Trans. Energy Convers. 2011, 26, 559–571. [Google Scholar] [CrossRef]
- Datta, M.; Senjyu, T.; Yona, A.; Funabashi, T. Minimal-order observer-based coordinated control method for isolated power utility connected multiple photovoltaic systems to reduce frequency deviations. IET Renew. Power Gener. 2010, 4, 153–164. [Google Scholar] [CrossRef]
- Liu, Y.; Xin, H.; Wang, Z.; Gan, D. Control of virtual power plant in microgrids: A coordinated approach based on photovoltaic systems and controllable loads. IET Gener. Transm. Distrib. 2015, 9, 921–928. [Google Scholar] [CrossRef]
- Pappu, V.A.K.; Chowdhury, B.; Bhatt, R. Implementing frequency regulation capability in a solar photovoltaic power plant. In Proceedings of the North American Power Symposium 2010, Arlington, TX, USA, 26–28 September 2010; pp. 1–6. [Google Scholar]
- Kumar, P.; Kothari, D.P. Recent philosophies of automatic generation control strategies in power systems. IEEE Trans. Power Syst. 2005, 20, 346–357. [Google Scholar] [CrossRef]
- Murty, P.S.R. Chapter 18—Power System Stability. In Electrical Power Systems; Murty, P.S.R., Ed.; Butterworth-Heinemann: Boston, MA, USA, 2017; pp. 479–526. ISBN 978-0-08-101124-9. [Google Scholar]
- Elgerd, O.I.; Fosha, C.E. Optimum megawatt-frequency control of multiarea electric energy systems. IEEE Trans. Power Appar. Syst. 1970, PAS-89, 556–563. [Google Scholar] [CrossRef]
- Parmar, K.P.S.; Majhi, S.; Kothari, D.P. Load frequency control of a realistic power system with multi-source power generation. Int. J. Electr. Power Energy Syst. 2012, 42, 426–433. [Google Scholar] [CrossRef]
- Ela, E.; Milligan, M.; Kirby, B. Operating Reserves and Variable Generation; Contract No. DE-AC36-08GO28308; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2011. [Google Scholar]
- Pouresmaeil, E.; Mehrasa, M.; Godina, R.; Vechiu, I.; Rodríguez, R.L.; Catalão, J.P.S. Double synchronous controller for integration of large-scale renewable energy sources into a low-inertia power grid. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Torino, Italy, 26–29 September 2017; pp. 1–6. [Google Scholar]
- Rebours, Y.G.; Kirschen, D.S.; Trotignon, M.; Rossignol, S. A survey of frequency and voltage control ancillary services—Part I: Technical features. IEEE Trans. Power Syst. 2007, 22, 350–357. [Google Scholar] [CrossRef]
- Brissette, A.; Hoke, A.; Maksimović, D.; Pratt, A. A microgrid modeling and simulation platform for system evaluation on a range of time scales. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 968–976. [Google Scholar]
- Chandorkar, M.C.; Divan, D.M.; Adapa, R. Control of parallel connected inverters in standalone AC supply systems. IEEE Trans. Ind. Appl. 1993, 29, 136–143. [Google Scholar] [CrossRef] [Green Version]
- Crossland, A.F.; Jones, D.; Wade, N.S.; Walker, S.L. Comparison of the location and rating of energy storage for renewables integration in residential low voltage networks with overvoltage constraints. Energies 2018, 11, 2041. [Google Scholar] [CrossRef]
- Yan, X.; Li, J.; Wang, L.; Zhao, S.; Li, T.; Lv, Z.; Wu, M. Adaptive-MPPT-based control of improved photovoltaic virtual synchronous generators. Energies 2018, 11, 1834. [Google Scholar] [CrossRef]
- Akbari, H.; Browne, M.C.; Ortega, A.; Huang, M.J.; Hewitt, N.J.; Norton, B.; McCormack, S.J. Efficient energy storage technologies for photovoltaic systems. Sol. Energy 2018. [Google Scholar] [CrossRef]
- Tavakoli, M.; Shokridehaki, F.; Funsho Akorede, M.; Marzband, M.; Vechiu, I.; Pouresmaeil, E. CVaR-based energy management scheme for optimal resilience and operational cost in commercial building microgrids. Int. J. Electr. Power Energy Syst. 2018, 100, 1–9. [Google Scholar] [CrossRef]
- Rodrigues, E.M.G.; Godina, R.; Catalão, J.P.S. Modelling electrochemical energy storage devices in insular power network applications supported on real data. Appl. Energy 2017, 188, 315–329. [Google Scholar] [CrossRef]
- Casey, L.F.; Schauder, C.; Cleary, J.; Ropp, M. Advanced inverters facilitate high penetration of renewable generation on medium voltage feeders-impact and benefits for the utility. In Proceedings of the 2010 IEEE Conference on Innovative Technologies for an Efficient and Reliable Electricity Supply, Waltham, MA, USA, 27–29 September 2010; pp. 86–93. [Google Scholar]
- Hoke, A.; Butler, R.; Hambrick, J.; Kroposki, B. Steady-state analysis of maximum photovoltaic penetration levels on typical distribution feeders. IEEE Trans. Sustain. Energy 2013, 4, 350–357. [Google Scholar] [CrossRef]
- Zabihi, S.; Zare, F. A new adaptive hysteresis current control with unipolar PWM used in active power filters. Aust. J. Electr. Electron. Eng. 2008, 4, 9–16. [Google Scholar] [CrossRef]
- Zabihi, S.; Zare, F. Active power filters with unipolar pulse width modulation to reduce switching losses. In Proceedings of the 2006 International Conference on Power System Technology, Chongqing, China, 22–26 October 2006; pp. 1–5. [Google Scholar]
- Zare, F.; Zabihi, S.; Ledwich, G. An adaptive hysteresis current control for a multilevel inverter used in an active power filter. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–8. [Google Scholar]
- Zabihi, S.; Zare, F. An adaptive hysteresis current control based on unipolar pwm for active power filters. In Proceedings of the 2006 Australasian Universities Power Engineering Conference, Melbourne, Australia, 10–13 December 2006. [Google Scholar]
- Ishaque, K.; Salam, Z.; Shamsudin, A.; Amjad, M. A direct control based maximum power point tracking method for photovoltaic system under partial shading conditions using particle swarm optimization algorithm. Appl. Energy 2012, 99, 414–422. [Google Scholar] [CrossRef]
- Eberhart, R.C.; Shi, Y.; Kennedy, J. Swarm Intelligence, 1st ed.; Morgan Kaufmann: San Francisco, CA, USA, 2001; ISBN 978-1-55860-595-4. [Google Scholar]
- Zhu, M.; Li, J.; Chang, D.; Zhang, G.; Chen, J. Optimization of antenna array deployment for partial discharge localization in substations by hybrid particle swarm optimization and genetic algorithm method. Energies 2018, 11, 1813. [Google Scholar] [CrossRef]
- Seyedmahmoudian, M.; Jamei, E.; Thirunavukkarasu, G.S.; Soon, T.K.; Mortimer, M.; Horan, B.; Stojcevski, A.; Mekhilef, S. Short-term forecasting of the output power of a building-integrated photovoltaic system using a metaheuristic approach. Energies 2018, 11, 1260. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Irradiation (w/m2) | D |
|---|---|
| 400–500 | 1 |
| 500–600 | 2 |
| 600–700 | 3 |
| 700–800 | 4 |
| 800–900 | 5 |
| 900–1000 | 6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tavakkoli, M.; Adabi, J.; Zabihi, S.; Godina, R.; Pouresmaeil, E. Reserve Allocation of Photovoltaic Systems to Improve Frequency Stability in Hybrid Power Systems. Energies 2018, 11, 2583. https://doi.org/10.3390/en11102583
Tavakkoli M, Adabi J, Zabihi S, Godina R, Pouresmaeil E. Reserve Allocation of Photovoltaic Systems to Improve Frequency Stability in Hybrid Power Systems. Energies. 2018; 11(10):2583. https://doi.org/10.3390/en11102583
Chicago/Turabian StyleTavakkoli, Mehdi, Jafar Adabi, Sasan Zabihi, Radu Godina, and Edris Pouresmaeil. 2018. "Reserve Allocation of Photovoltaic Systems to Improve Frequency Stability in Hybrid Power Systems" Energies 11, no. 10: 2583. https://doi.org/10.3390/en11102583
APA StyleTavakkoli, M., Adabi, J., Zabihi, S., Godina, R., & Pouresmaeil, E. (2018). Reserve Allocation of Photovoltaic Systems to Improve Frequency Stability in Hybrid Power Systems. Energies, 11(10), 2583. https://doi.org/10.3390/en11102583