Analysis and Sizing of Power Distribution Architectures Applied to Fuel Cell Based Vehicles

 ,
,
Abstract
:1. Introduction
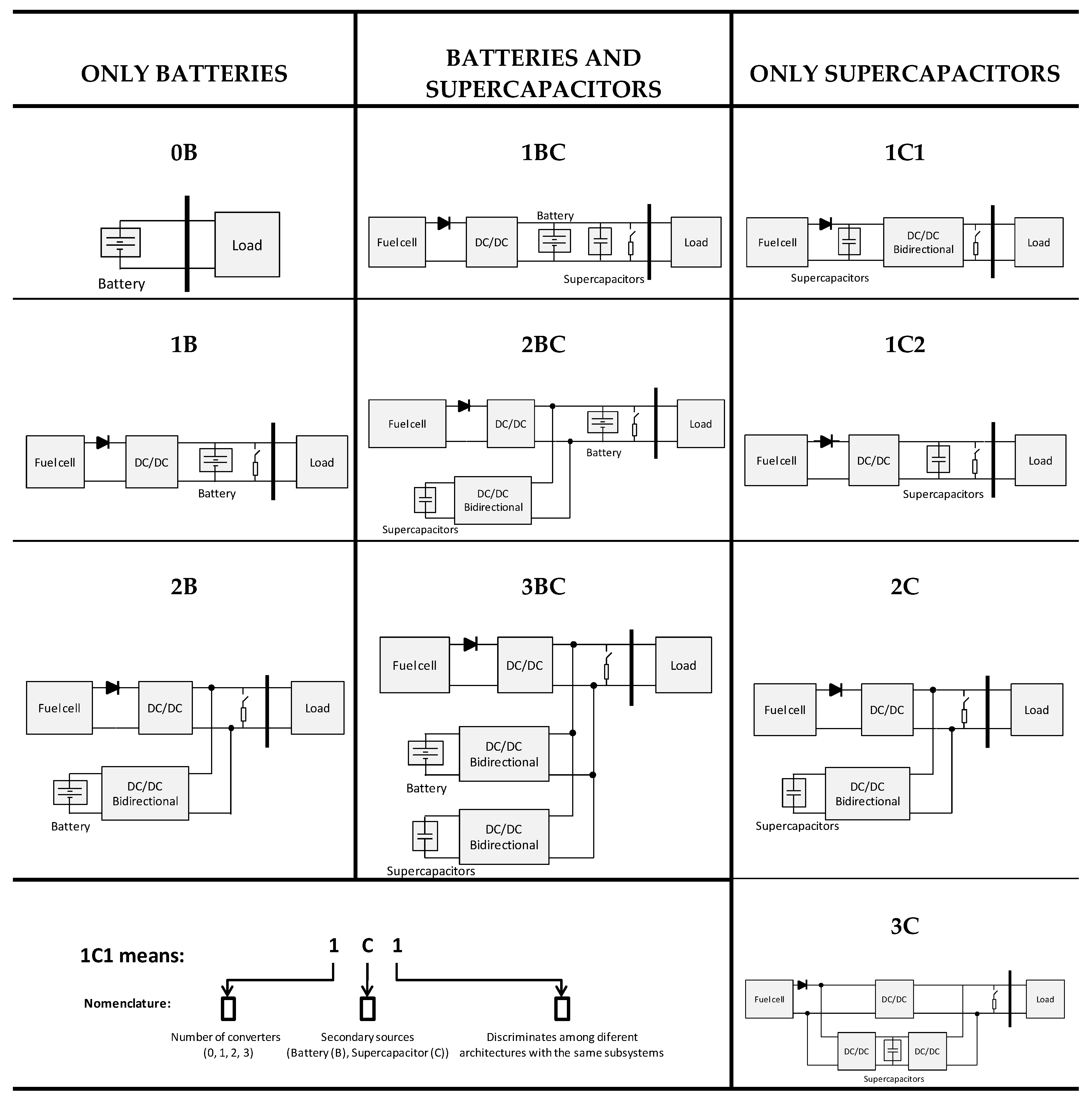
- A wide variety of possible combinations of secondary energy storage devices (fuel cell and batteries, fuel cell and supercapacitors, fuel cell with both batteries and supercapacitors).
- An optimal sizing procedure as a function of the maximum power provided by the fuel cell. The optimal sizing procedure presented in this paper is an analytical problem, needless to use any programming technique. The proposed optimal sizing procedure offers a more straightforward graphical solution map, where the most appropriate architecture can be chosen as a function of the maximum power provided by the fuel cell (fuel cell size).
- All the subsystems of the vehicle powertrain for the sizing optimisation procedure.
2. Architecture Sizing
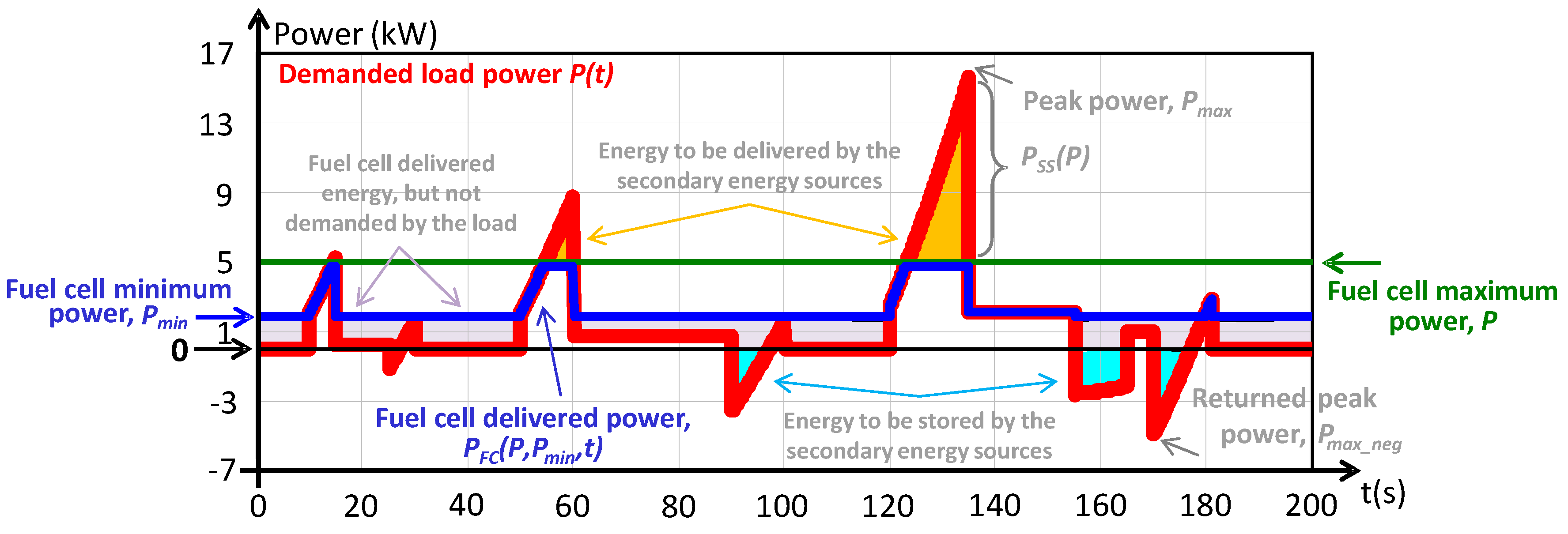
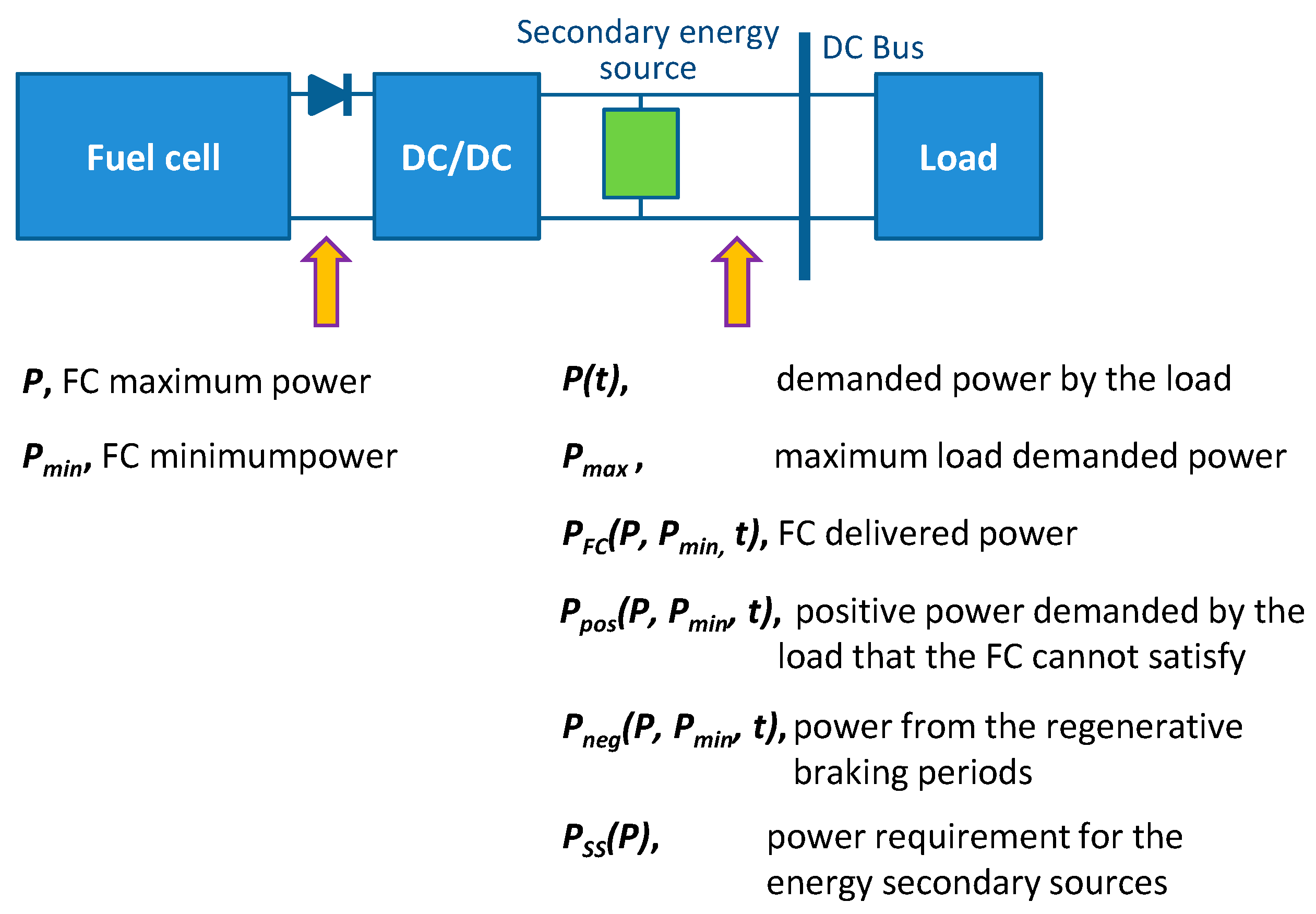
- There are different possibilities to split the power demanded by the load between the fuel cell and the secondary energy sources. However, the presented optimal sizing procedure does not include any control strategy nor power management technique, and therefore the fuel cell could deliver all the power demanded by the load until its maximum value, with the aim of apply classical control loops over the system. It is considered the most general case.
- The optimal sizing procedure considered the power and the average energy values that the secondary energy sources have to manage, in every cycle, along the complete working day.
- The optimum designs require that the energy stored in the secondary energy sources must be enough, in each cycle, to cover the energy that the rest of the system demands to it.
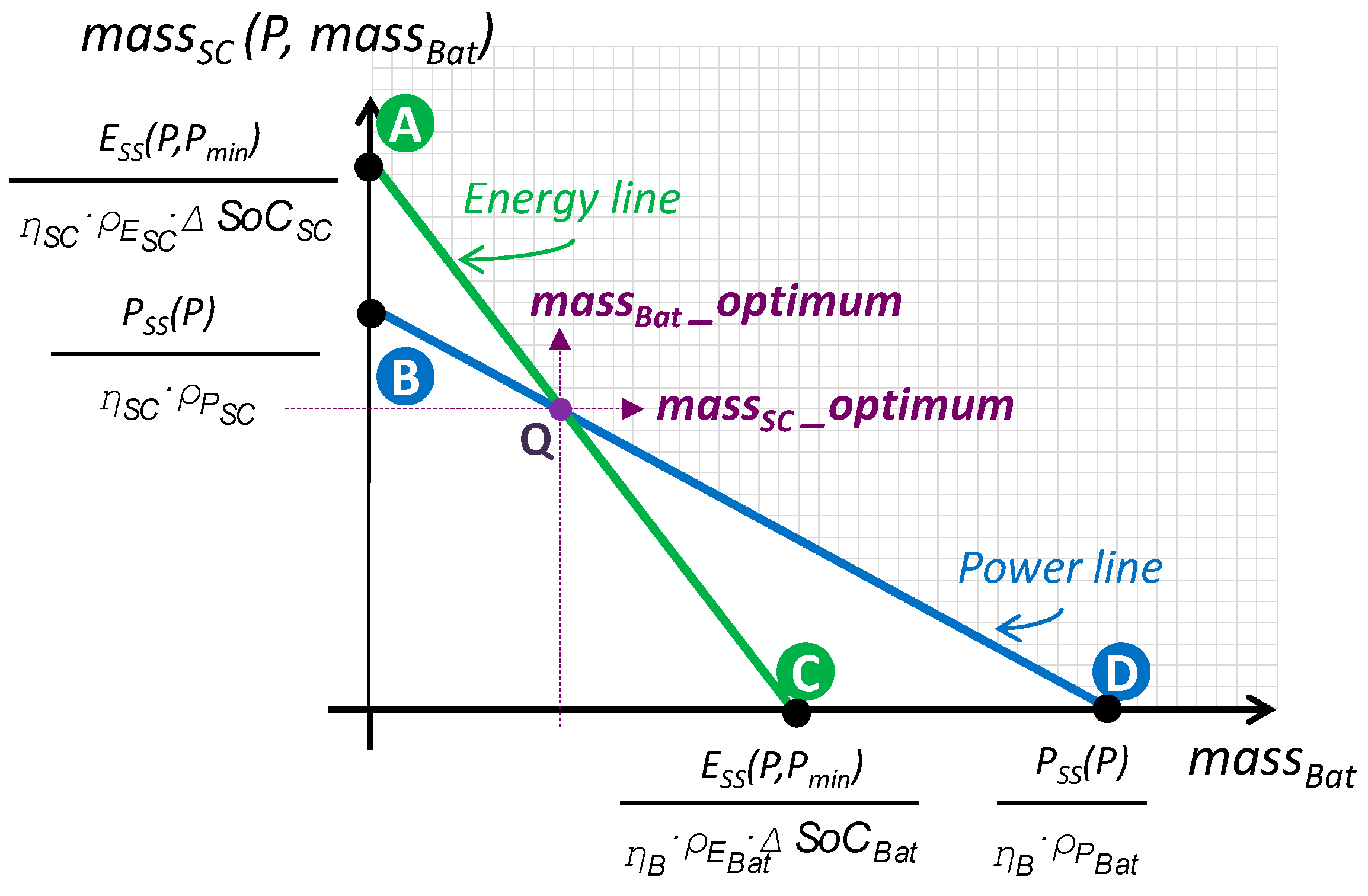
2.1. Calculation of the Secondary Energy Sources Minimum Mass
2.2. Battery and Supercapacitor Masses and Cost
2.3. Fuel Cell Mass and Cost
2.4. Power Converters Mass and Cost
2.5. Propulsion System Mass and Cost
2.6. Secondary Energy Source Selection
3. Powertrain Analysis
3.1. Architecture Subsystems Analysis
3.1.1. Unidirectional and Bidirectional Power Converters
- (a)
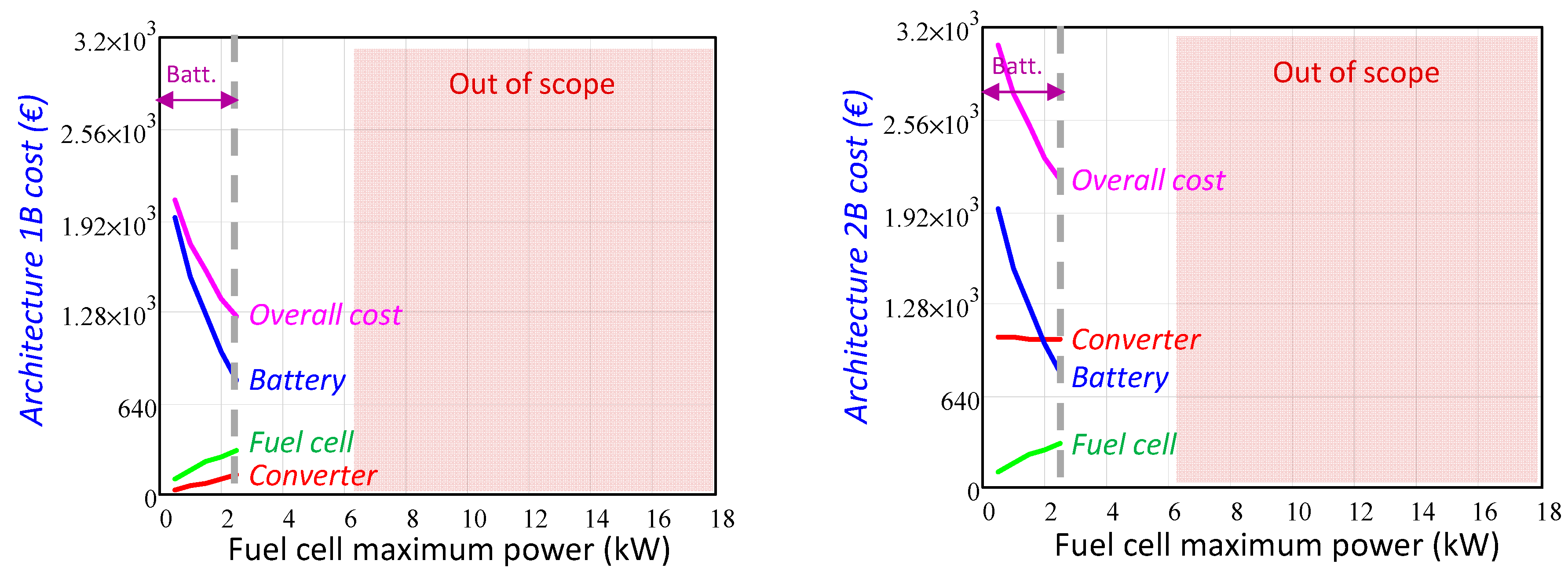
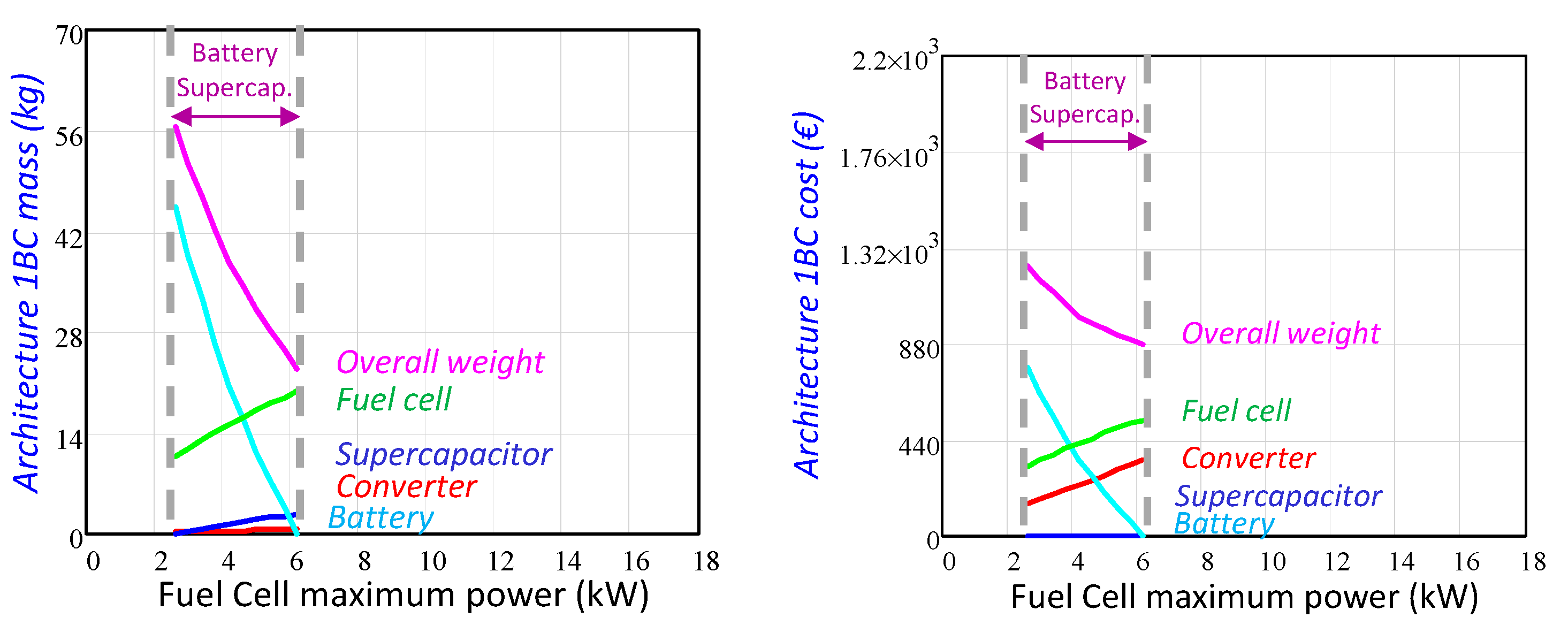
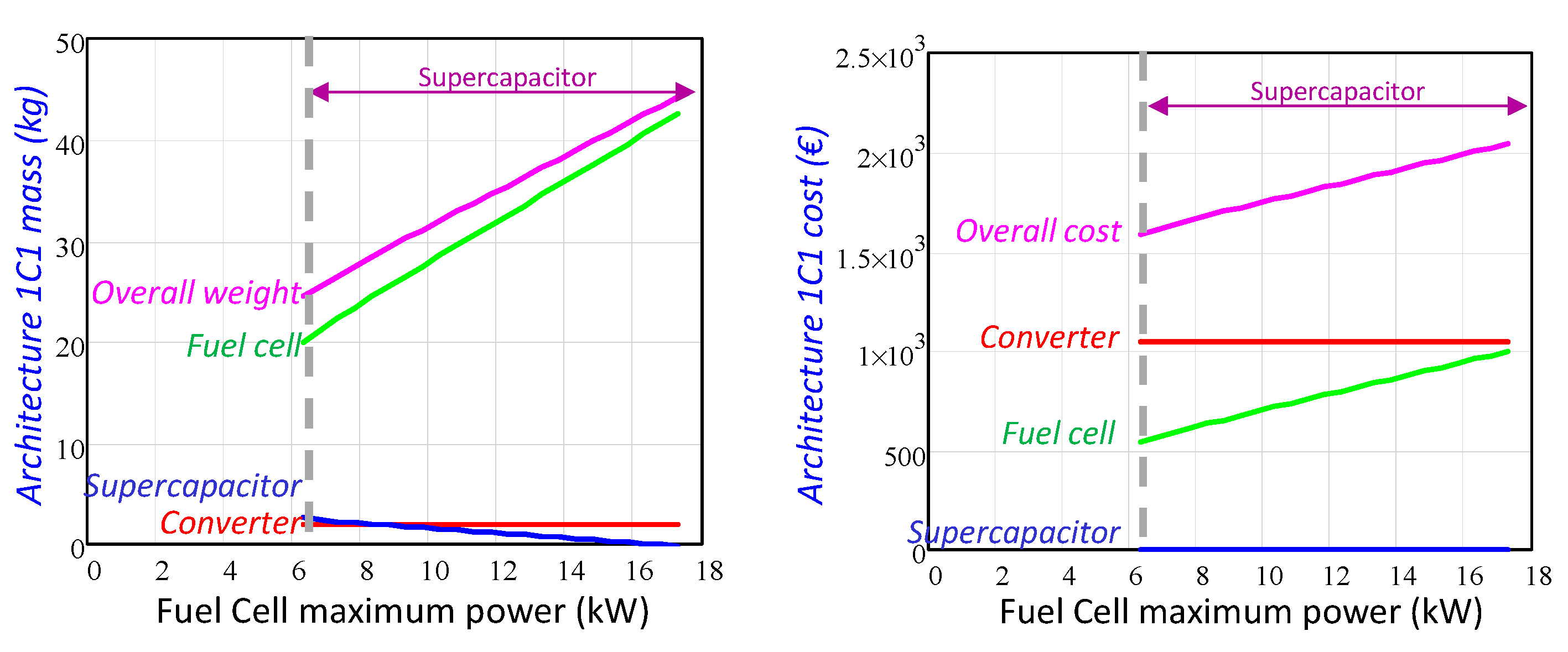
- Architectures that implement only a unidirectional power converter, downstream of the fuel cell: 1B, 1C2 and 1BC. In these cases, the power converter mass and cost increases with the fuel cell maximum power, see Figure 10. The architecture 1C1 implements only a power converter, directly connected to the voltage bus. This power converter manages the maximum power since it is connected downstream of the set of supercapacitors. Its mass and cost are fixed independently of the fuel cell maximum power, as Figure 10 depicts.
- (b)
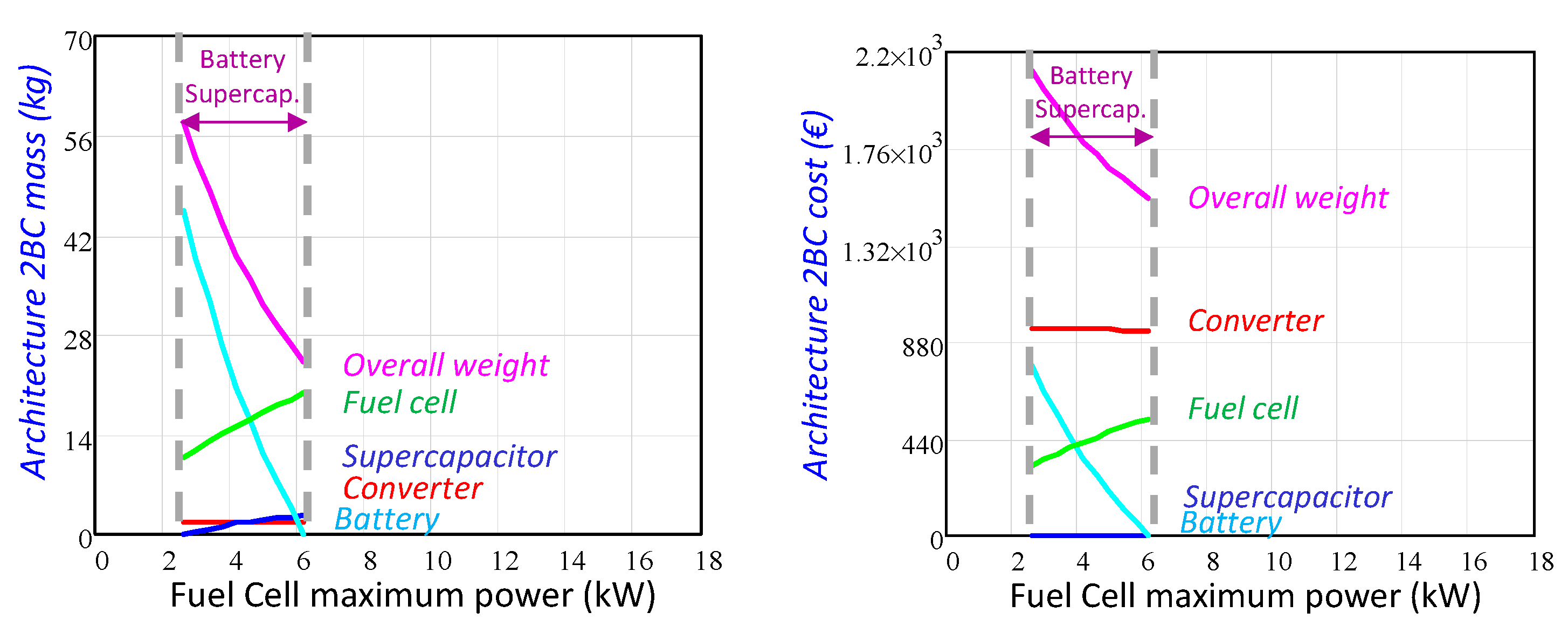
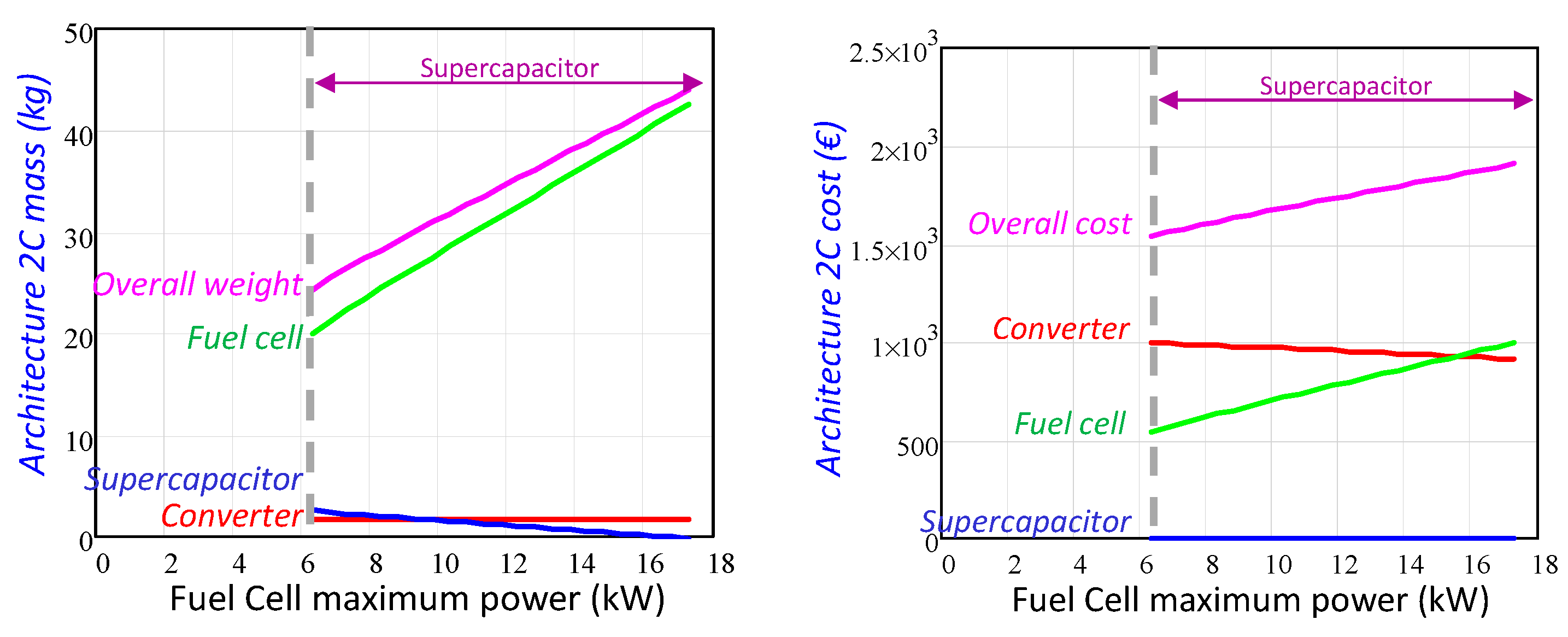
- The architectures 2B, 2C, 2BC and 3BC implement a unidirectional power converter downstream of the fuel cell, and one or more bidirectional power converters that manage the power difference between the load power requirement and the fuel cell delivered power.
- (c)
- The power required by the load is provided between all the power converters. Therefore, the power managed by the bidirectional power converters reduces as the maximum power provided by the fuel cell increases. Thus, the bidirectional power converters mass and cost decrease when the fuel cell maximum power increases, see Figure 10.
- (d)
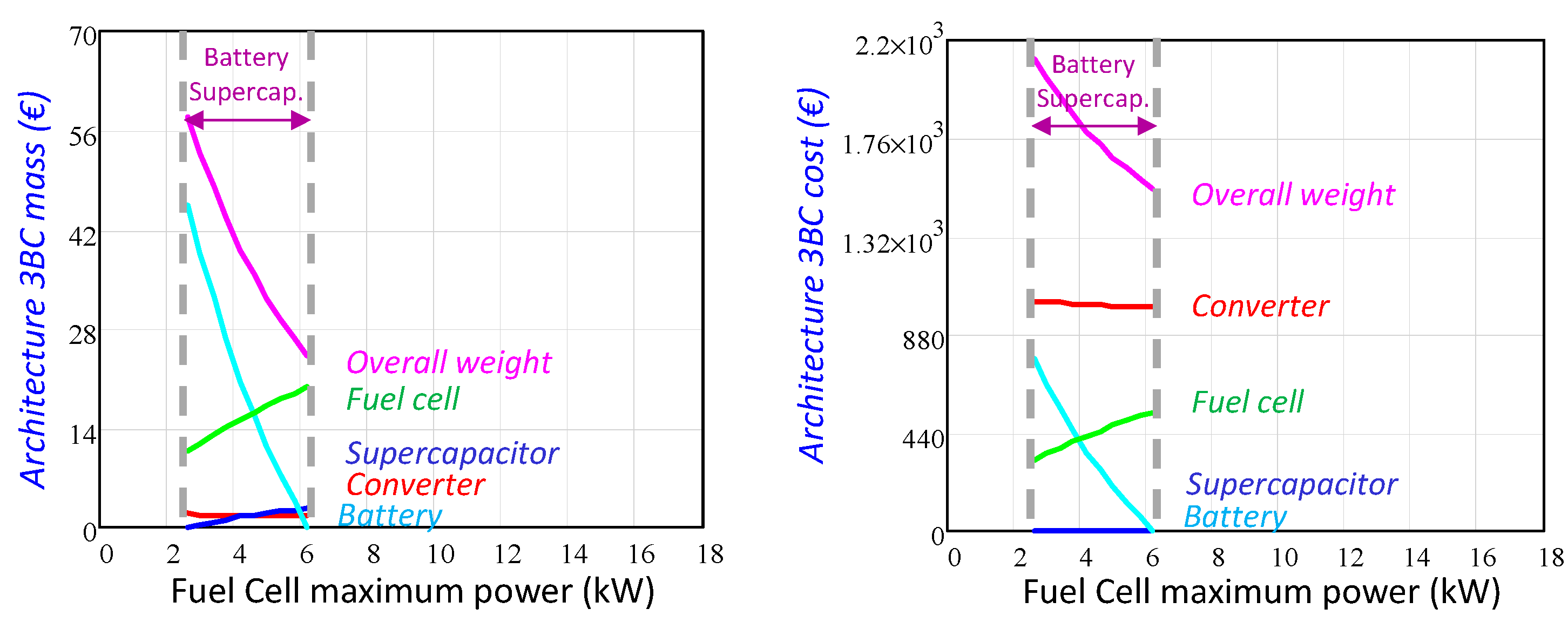
- Finally, the architecture 3C implements a unidirectional power converter downstream of the fuel cell, another unidirectional power converter connected to the supercapacitors, and a bidirectional power converter that manages twice the energy difference between the load demanded power and the power delivered by the fuel cell. Then, the three power converter global cost and mass decrease as the fuel cell maximum power increases, as Figure 10 depicts.
3.1.2. Batteries
3.1.3. Supercapacitors
3.2. Architectures Global Analysis
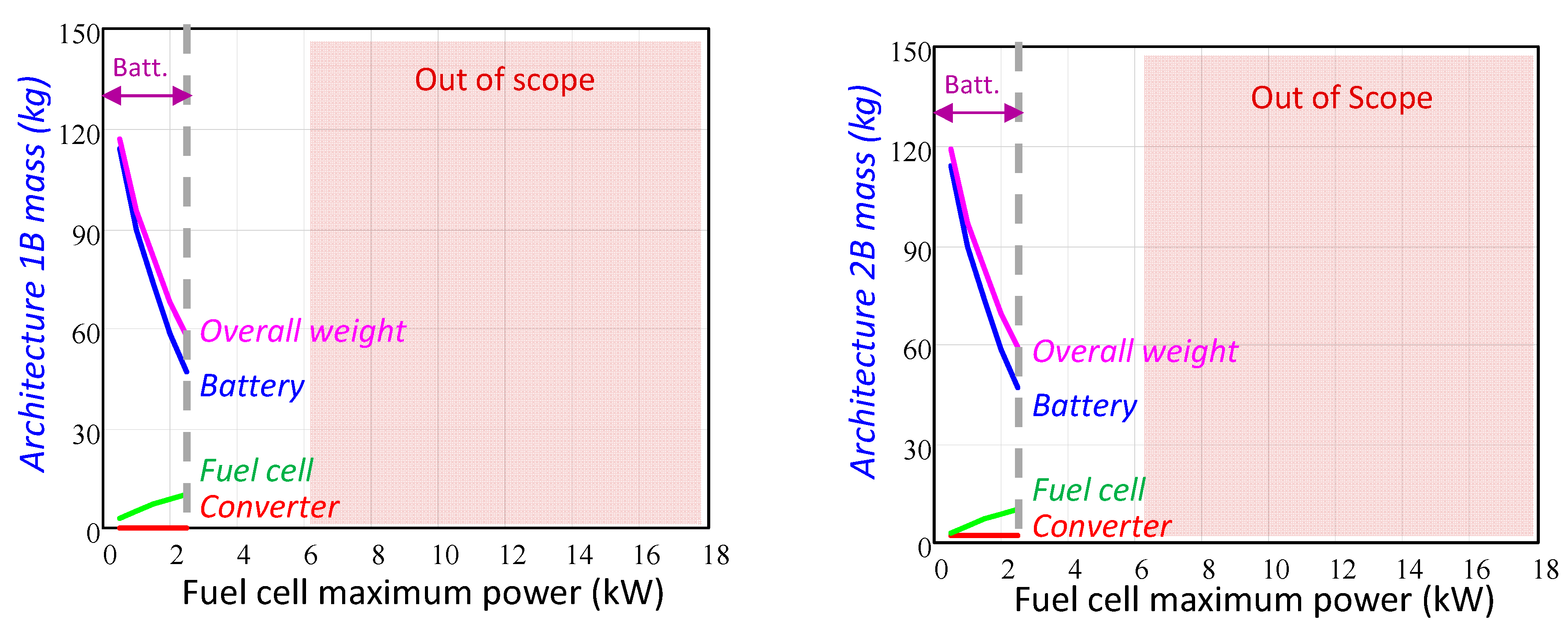
3.2.1. Architectures with Only Battery as an Auxiliary Power Source
3.2.2. Architectures with Battery and Supercapacitors as an Auxiliary Power Source
3.2.3. Architectures with Only Supercapacitors as an Auxiliary Power Source
3.3. Comparative Analysis of The Architectures
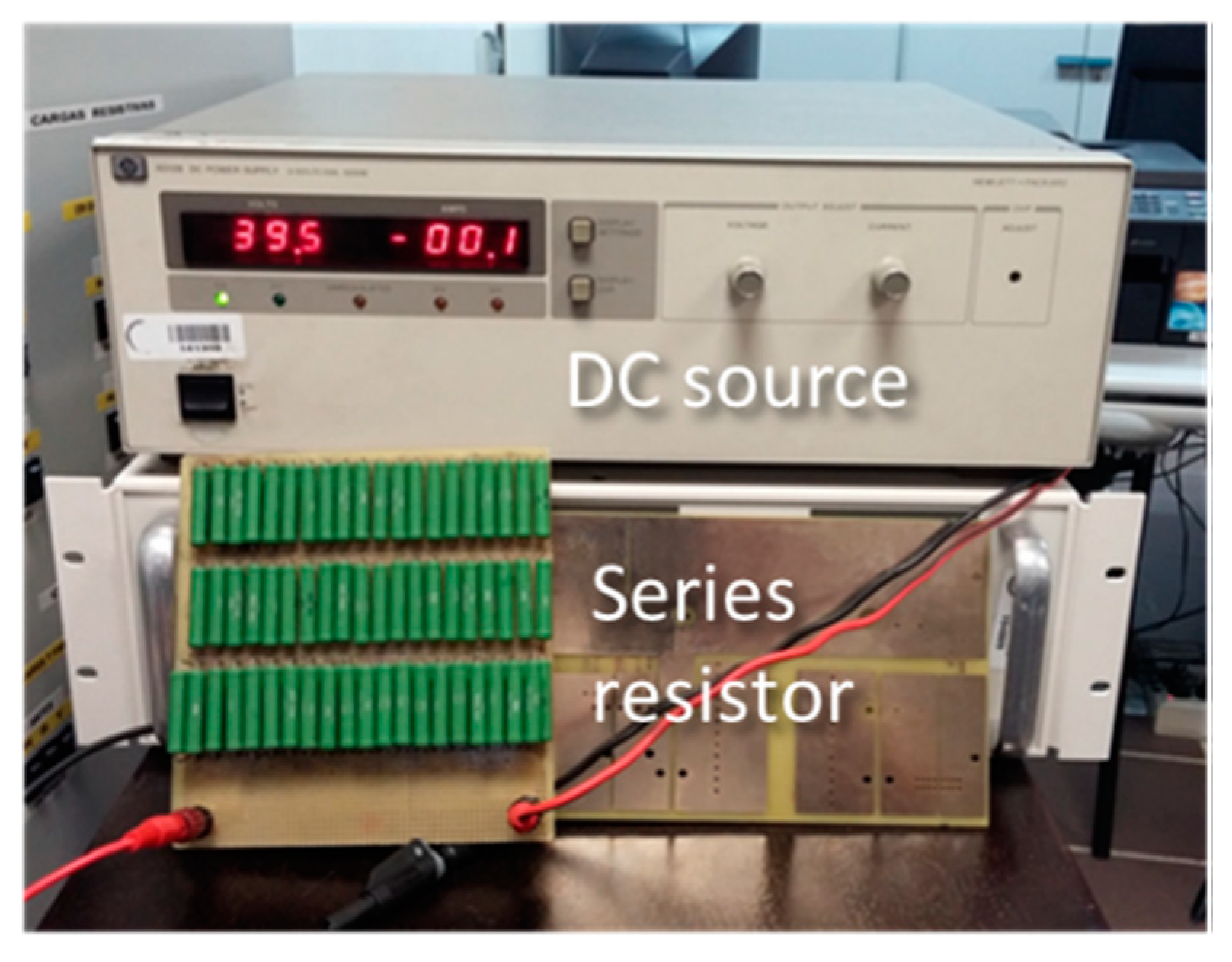
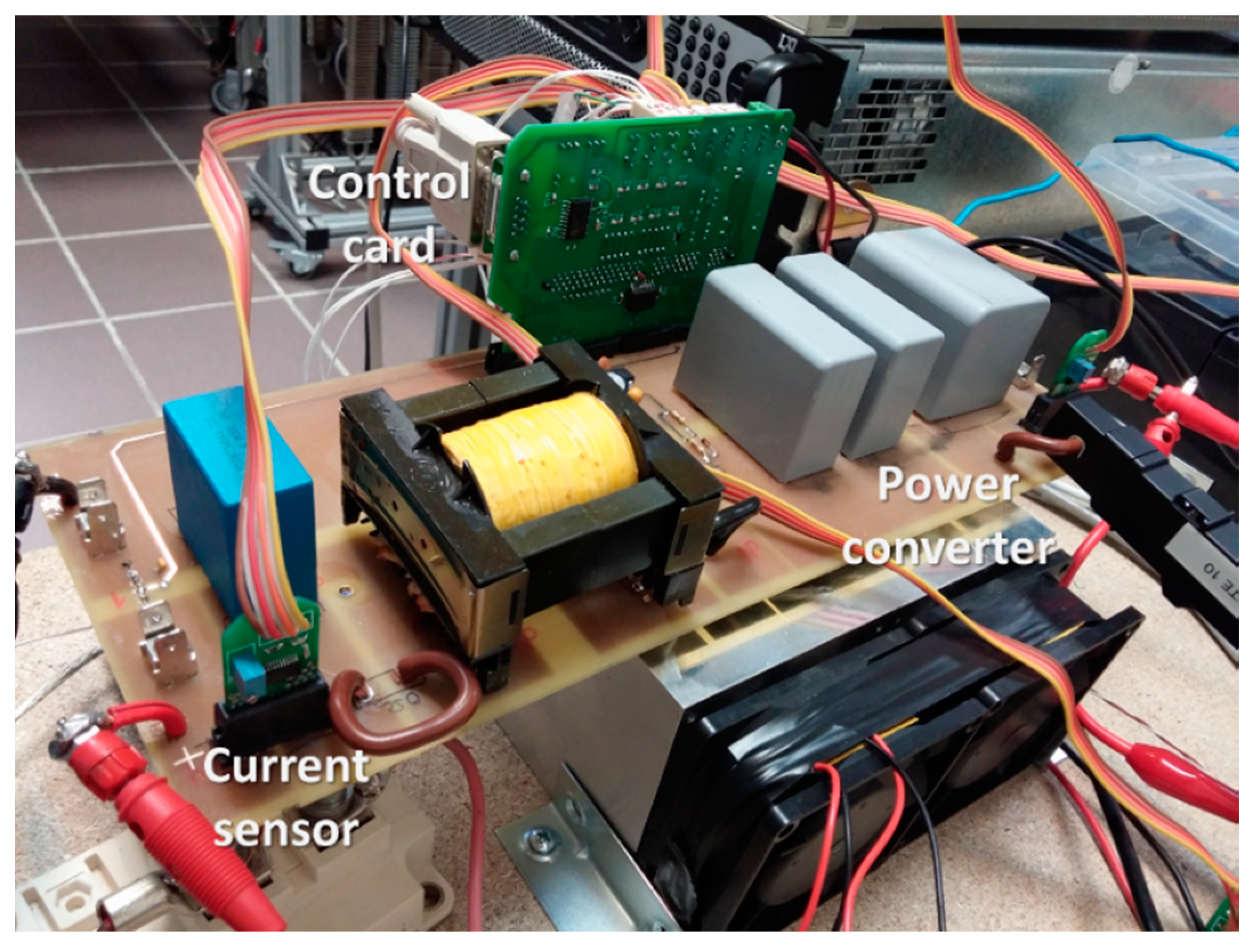
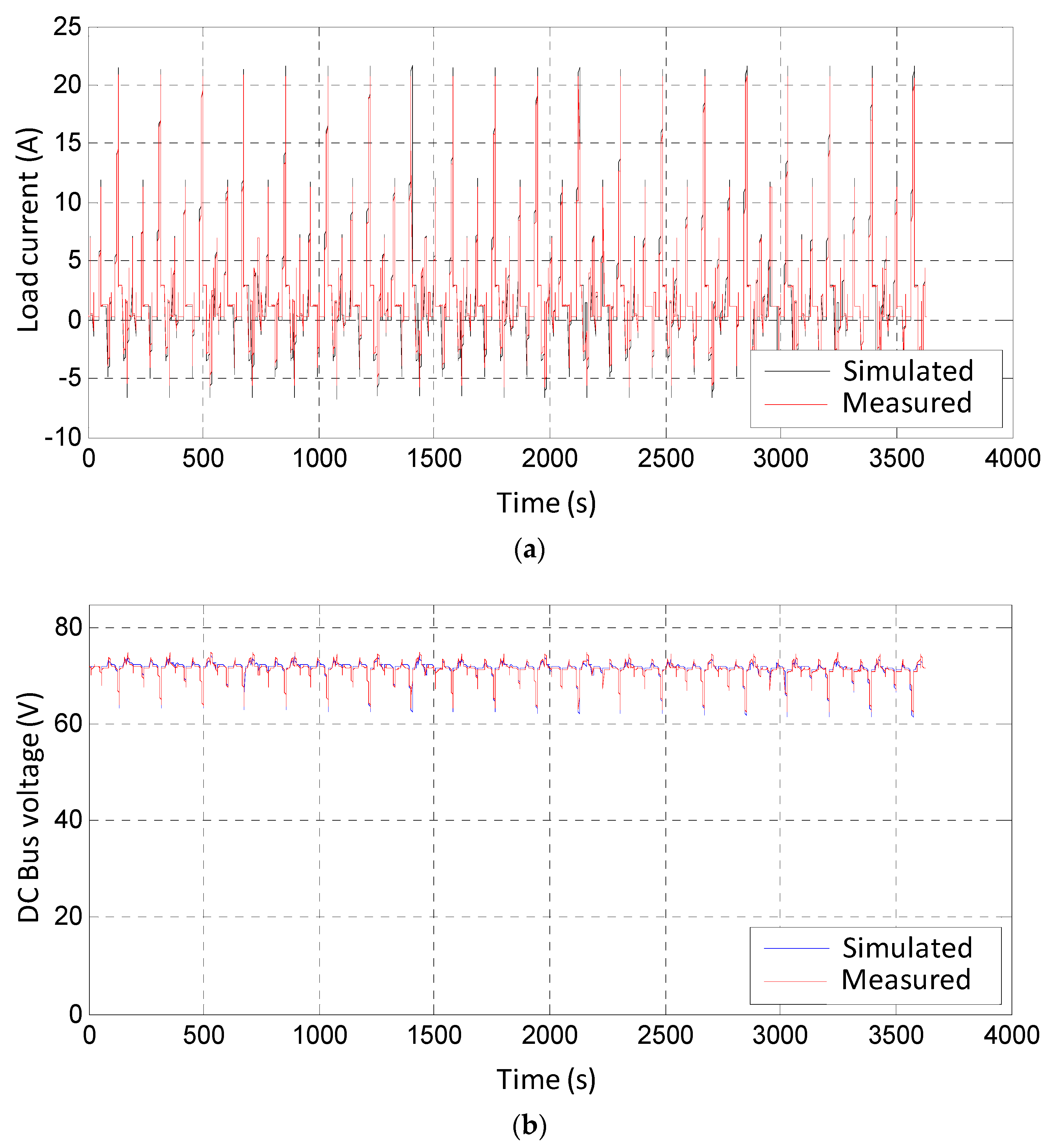
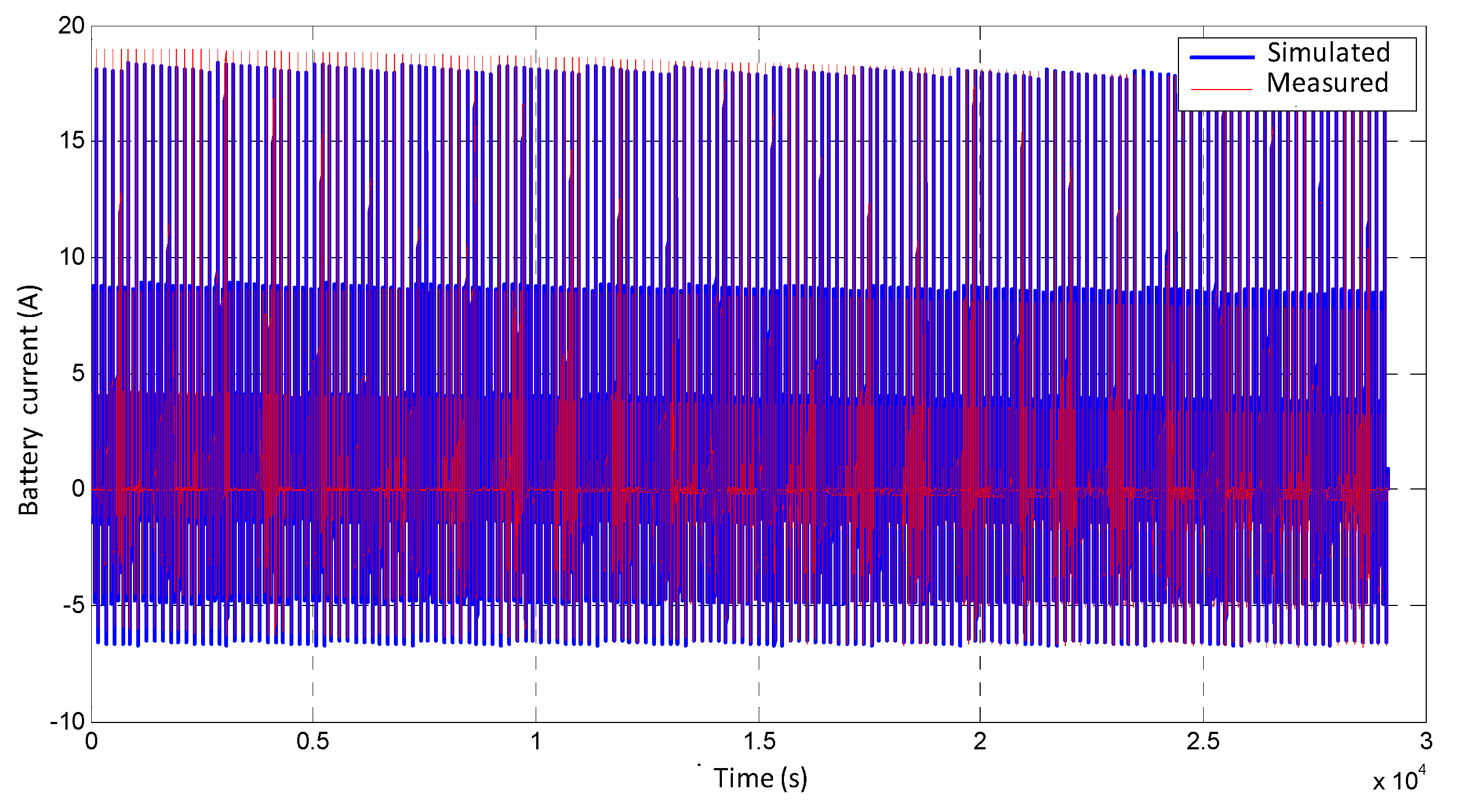
4. Experimental Validation
5. Conclusions
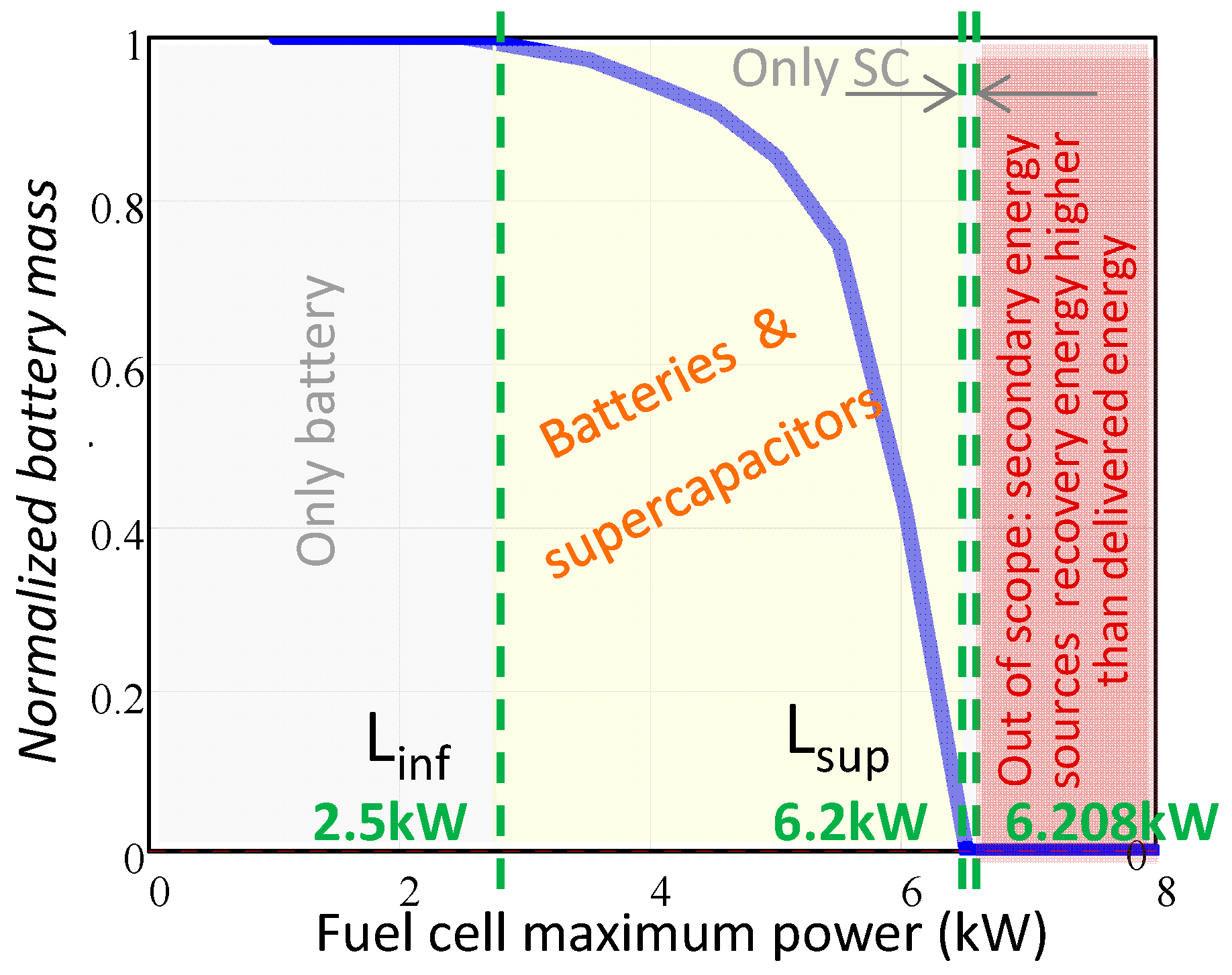
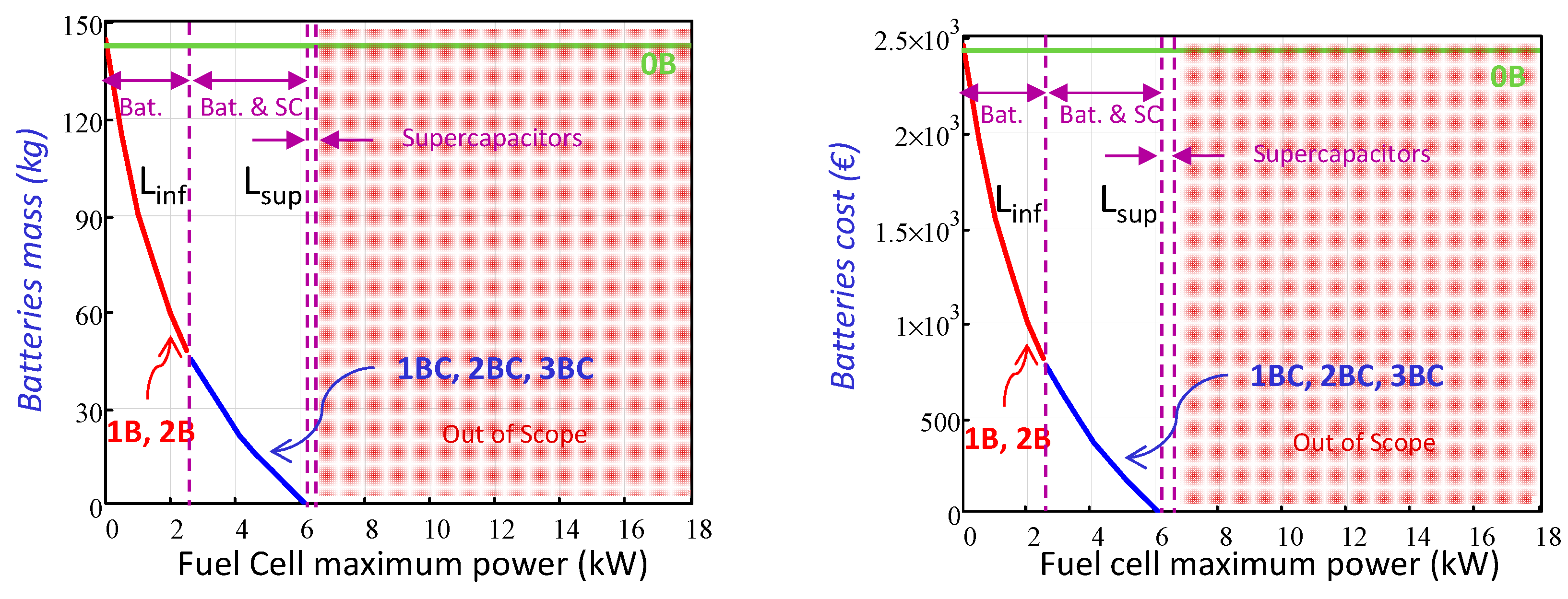
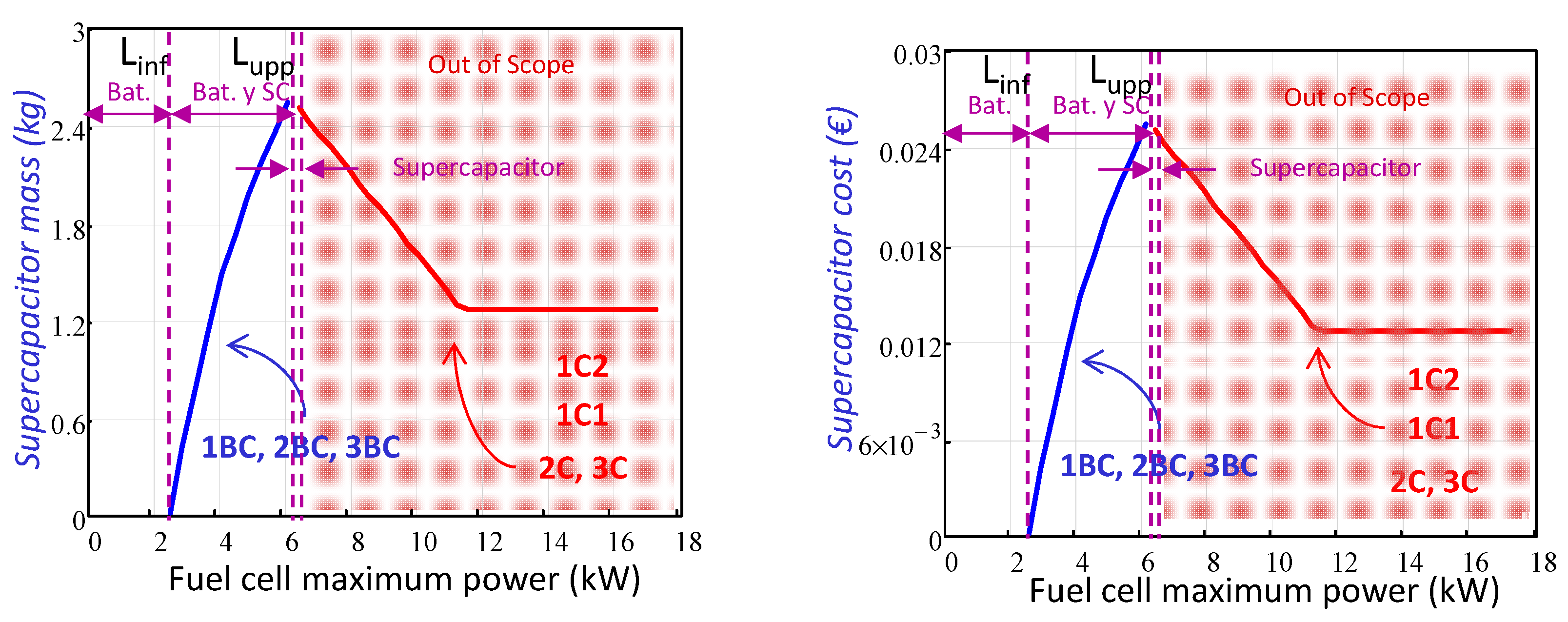
- In the low power range, the secondary energy sources total mass is determined by the energy requirement, and then the minimum mass is achieved using only batteries.
- In the middle power range, the optimum solution regarding mass is based on a combination of batteries and supercapacitors.
- Finally, in the high power range, the secondary energy sources total mass is imposed by the power requirement, and then the use of only supercapacitors is recommended.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ostadi, A.; Kazerani, M. Optimal Sizing of the Battery Unit in a Plug-in Electric Vehicle (PEV). IEEE Trans. Veh. Technol. 2014, 63, 3077–3084. [Google Scholar] [CrossRef]
- Souffran, G.; Miegeville, L.; Guerin, P. Simulation of Real-World Vehicle Missions Using a Stochastic Markov Model for Optimal Powertrain Sizing. IEEE Trans. Veh. Technol. 2014, 61, 3454–3465. [Google Scholar] [CrossRef]
- Pourabdollah, M.; Murgovski, N.; Grauers, A.; Egardt, B. Optimal Sizing of a Parallel PHEV Powertrain. IEEE Trans. Veh. Technol. 2013, 62, 2469–2480. [Google Scholar] [CrossRef] [Green Version]
- Araujo, R.; de Castro, R.; Pinto, C.; Melo, P.; Freitas, D. Combined Sizing and Energy Management in EVs with Batteries and Supercapacitors. IEEE Trans. Veh. Technol. 2014, 63, 3062–3076. [Google Scholar] [CrossRef]
- Global EV Outlook 2018. Available online: https://www.connaissancedesenergies.org/sites/default/files/pdf-actualites/globalevoutlook2018.pdf (accessed on 17 September 2018).
- Bakker, S.; Trip, J. Policy options to support the adoption of electric vehicles in the urban environment. Transp. Res. Part D 2013, 25, 18–23. [Google Scholar] [CrossRef]
- Shafiee, S.; Fotuhi-Firuzabad, M.; Rastegar, M. Investigating the impacts of plug-in hybrid electric vehicles on power distribution systems. IEEE Trans. Smart Grid 2013, 4, 1351–1360. [Google Scholar] [CrossRef]
- Fuel Cells: Toyota Means Business. Available online: https://spectrum.ieee.org/cars-that-think/transportation/advanced-cars/fuel-cells-toyota-means-business- (accessed on 17 September 2018).
- Speers, P. Hydrogen Mobility Europe (H2ME): Vehicle and Hydrogen Refuelling Station Deployment Results. World Electr. Veh. J. 2018, 9. [Google Scholar] [CrossRef]
- First Mass-Produced Tucson Fuel Cell CUVs Arrive in Southern California. Available online: https://www.hyundai.com/worldwide/en/about-hyundai/news-room/news/hyundai%2527s-first-mass-produced-tucson-fuel-cell-cuvs-arrive-in-southern-california-0000002989 (accessed on 17 September 2018).
- Marx, N.; Hissel, D.; Gustin, F.; Boulon, L.; Agbossou, K. On the sizing and energy management of a hybrid multi-stack fuel cell—Battery system for automotive applications. Int. J. Hydrog. Energy 2017, 42, 1518–1526. [Google Scholar] [CrossRef]
- Feroldi, D.; Carignano, M. Sizing for fuel cell/supercapacitor hybrid vehicles based on stochastic driving cycles. Appl. Energy 2016, 183, 645–658. [Google Scholar] [CrossRef]
- Hu, X.; Johannesson, L.; Murgovski, N.; Egardt, B. Longevity-conscious dimensioning and power management of the hybrid energy storage system in a fuel cell hybrid electric bus. Appl. Energy 2015, 137, 913–924. [Google Scholar] [CrossRef]
- Hu, X.; Murgovski, N.; Johannesson, L.M.; Egardt, B. Optimal dimensioning and power management of a fuel cell/battery hybrid bus via convex programming. IEEE ASME Trans. Mechatron. 2015, 20, 457–468. [Google Scholar] [CrossRef]
- Xiao, B.; Lu, H.; Wang, H.; Ruan, J.; Zhang, N. Enhanced regenerative braking strategies for electric vehicles: Dynamic performance and potential analysis. Energies 2017, 10. [Google Scholar] [CrossRef]
- He, C.; Wang, G.; Gong, Z.; Xing, Z.; Xu, D. A Control Algorithm for the Novel Regenerative–Mechanical Coupled Brake System with by-Wire Based on Multidisciplinary Design Optimization for an Electric Vehicle. Energies 2018, 11, 2322. [Google Scholar] [CrossRef]
- Ravey, A.; Member, S.; Watrin, N.; Blunier, B.; Bouquain, D.; Miraoui, A.; Member, S. Energy-Source-Sizing Methodology for Hybrid Fuel Cell Vehicles Based on Statistical Description of Driving Cycles. IEEE Trans. Veh Technol. 2015, 60, 4164–4174. [Google Scholar] [CrossRef]
- Hegazy, O.; Van Mierlo, J. Particle swarm optimization for optimal powertrain component sizing and design of fuel cell hybrid electric vehicle. In Proceedings of the International Conference on Optimisation of Electrical and Electronic Equipment, OPTIM, Basov, Romania, 20–22 May 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 601–609. [Google Scholar]
- Kamali-Nejad, M.; Azib, T.; Remy, G.; Bethoux, O.; Marchand, C. Optimization of a power electronic structure for hybrid Fuel Cell/Ultracapacitors vehicle. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–6. [Google Scholar]
- Cai, Q.; Brett, D.J.L.; Browning, D.; Brandon, N.P. A sizing-design methodology for hybrid fuel cell power systems and its application to an unmanned underwater vehicle. J. Power Sources 2010, 195, 6559–6569. [Google Scholar] [CrossRef]
- Rotenberg, D.; Vahidi, A.; Kolmanovsky, I. Ultracapacitor assisted powertrains: Modeling, control, sizing, and the impact on fuel economy. IEEE Trans. Control Syst. Technol. 2011, 19, 576–589. [Google Scholar] [CrossRef]
- Hu, X.; Murgovski, N.; Johannesson, L.M.; Egardt, B. Comparison of three electrochemical energy buffers applied to a hybrid bus powertrain with simultaneous optimal sizing and energy management. IEEE Trans. Intell. Trans. Syst. 2014, 15, 1193–1205. [Google Scholar] [CrossRef]
- Bubna, P.; Advani, S.G.; Prasad, A.K. Integration of batteries with ultracapacitors for a fuel cell hybrid transit bus. J. Power Sources 2012, 199, 360–366. [Google Scholar] [CrossRef]
- Aschilean, I.; Varlam, M.; Culcer, M.; Iliescu, M.; Raceanu, M.; Enache, A.; Filote, C. Hybrid Electric Powertrain with Fuel Cells for a Series Vehicle. Energies 2018, 11, 1294. [Google Scholar] [CrossRef]
- Yu, Z.; Zinger, D.; Bose, A. An innovative optimal power allocation strategy for fuel cell, battery and supercapacitor hybrid electric vehicle. J. Power Sources 2011, 196, 2351–2359. [Google Scholar] [CrossRef]
- Snoussi, J.; Ben Elghali, S.; Benbouzid, M.; Mimouni, M. Auto-Adaptive Filtering Based Energy Management Strategy for Fuel Cell Hybrid Electric Vehicles. Energies 2018, 11, 2118. [Google Scholar] [CrossRef]
- Ruan, X.; Wu, C.; Cheng, L.; Tse, C.K.; Yan, H.; Zhang, T. Control Strategy for Input-Series–Output-Parallel Converters. IEEE Trans. Ind. Electron. 2009, 56, 1174–1185. [Google Scholar] [CrossRef]
- Zumel, P.; Ortega, L.; Lazaro, A.; Fernandez, C.; Barrado, A. Control strategy for modular Dual Active Bridge input series output parallel. In Proceedings of the IEEE 14th Workshop on Control and Modeling for Power Electronics (COMPEL), Salt Lake City, UT, USA, 23–26 June 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar] [CrossRef]
- Raga, C.; Barrado, A.; Lazaro, A.; Miniguano, H.; Zumel, P.; Sanz, M. Optimal sizing of propulsion systems applied to fuel cell based vehicles. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Pittsburgh, PA, USA, 14–18 September 2014; pp. 4797–4803. [Google Scholar]
- Lei, Z.; Cheng, D.; Liu, Y.; Qin, D.; Zhang, Y.; Xie, Q. A dynamic control strategy for hybrid electric vehicles based on parameter optimization for multiple driving cycles and driving pattern recognition. Energies 2017, 10. [Google Scholar] [CrossRef]
- Grube, T.; Stolten, D. The Impact of Drive Cycles and Auxiliary Power on Passenger Car Fuel Economy. Energies 2018, 11, 1010. [Google Scholar] [CrossRef]
- Cubito, C.; Millo, F.; Boccardo, G.; Di Pierro, G.; Ciuffo, B.; Fontaras, G.; Trentadue, G. Impact of Different Driving Cycles and Operating Conditions on CO2 Emissions and Energy Management Strategies of a Euro-6 Hybrid Electric Vehicle. Energies 2017, 10, 1590. [Google Scholar] [CrossRef]
- Kivekäs, K.; Lajunen, A.; Vepsäläinen, J.; Tammi, K. City Bus Powertrain Comparison : Driving Cycle Variation and Passenger Load Sensitivity Analysis. Energies 2018, 17, 1755. [Google Scholar] [CrossRef]
- Henao, N.; Kelouwani, S.; Agbossou, K.; Dube, Y. PEMFC low-temperature startup for electric vehicle. In Proceedings of the IEEE Industrial Electronics Society Annual Conference, Montreal, QC, Canada, 25–28 October 2012; pp. 2977–2982. [Google Scholar]
- Cost Analysis of Fuel Cell Systems for Transportation. Available online: https://www1.eere.energy.gov/hydrogenandfuelcells/pdfs/tiax_cost_analysis_pres.pdf (accessed on 17 September 2018).
- Azkarate, I.; Ezponda, E.; Agote, I. Hidrógeno y Pilas de Combustible: Estado Actual y Perspectiva Inmediata, 1st ed.; Asociación Nacional de Ingenieros del ICAI, Universidad Pontificia Comillas, Eds.; INASMET: Madrid, Spain, 2007; ISBN 978-84-9359050-6-7. [Google Scholar]
- Oliver, J.A.; Zumel, P.; Sanz, M.; Raga, C.; Izquierdo, D.; Garcia, O.; Barrado, A.; Prieto, R.; Azcona, R.; Delicado, B.; et al. High level decision methodology for the selection of a fuel cell based power distribution architecture for an aircraft application. In Proceedings of the Energy Conversion Congress and Exposition (ECCE 2009), San Jose, CA, USA, 20–24 September 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 459–464. [Google Scholar]
- Kolar, J.W.; Drofenik, U.; Biela, J.; Heldwein, M.L.; Ertl, H.; Friedli, T.; Round, S.D. PWM Converter Power Density Barriers. In Proceedings of the Power Conversion Conference—Nagoya, Nagoya, Japan, 2–5 April 2007; pp. 9–29. [Google Scholar]
- Sahay, K.; Dwivedi, B. Design and analysis of supercapacitors energy storage system for energy stabilization of distribution network. Electr. Power Qual. Util. 2009, 15, 25–32. [Google Scholar]
- Vazquez, S.; Lukic, S.M.; Galvan, E.; Franquelo, L.G.; Carrasco, J.M. Energy Storage Systems for Transport and GridApplications. IEEE Trans. Ind. Electron. 2010, 57, 3881–3895. [Google Scholar] [CrossRef]
- Khaligh, A.; Li, Z. Battery, Ultracapacitor, Fuel Cell, and Hybrid Energy Storage Systems for Electric, Hybrid Electric, Fuel Cell, and Plug-In Hybrid Electric Vehicles: State of the Art. Veh. Technol. IEEE Trans. 2010, 59, 2806–2814. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Miller, J.M. Hybrid Electric Vehicles: Architecture and Motor Drives. Pro. IEEE 2007, 95, 719–728. [Google Scholar] [CrossRef]
- Miller, J.M. Energy storage system technology challenges facing strong hybrid, plug-in and battery electric vehicles. In Proceedings of the Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 4–10. [Google Scholar]
- Cost Analysis of PEM Fuel Cell Systems for Transportation. 2005. Available online: https://www.nrel.gov/docs/fy06osti/39104.pdf (accessed on 17 September 2018.).
- Targets for Onboard Hydrogen Storage Systems for Light-Duty Vehicles. Available online: https://www1.eere.energy.gov/hydrogenandfuelcells/storage/pdfs/targets_onboard_hydro_storage_explanation.pdf (accessed on 17 September 2018.).
- DOE Hydrogen and Fuel Cells Program Record 9017: On-Board Hydrogen Storage Systems—Projected Performance and Cost Parameters. Available online: https://www.hydrogen.energy.gov/pdfs/9017_storage_performance.pdf (accessed on 17 September 2018.).
- De Bruijn, F.A. PEM Fuel Cells Durability and Cost. 2009. Available online: https://www.ecn.nl/docs/library/report/2009/l09177.pdf (accessed on 17 September 2018).
- Besselink, I.J.M.; van Oorschot, P.F.; Meinders, E.; Nijmeijer, H. Design of an efficient, low mass battery electric vehicle based on a VW Lupo 3L. In Proceedings of the 25th International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium (EVS 25), Shenzen, China, 5–9 November 2010; pp. 32–41. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment | Value |
|---|---|
| Unidirectional power converter | |
| Bidirectional power converter | |
| Supercapacitors | |
| Batteries (Lithium-Ion) | |
| Fuel cell | |
| H2 storage system gravimetric capacity | 4800 g H2/g |
| H2 storage system volumetric capacity | 25.6 g H2/L 850 Wh/l |
| Fuel cell efficiency | ηFC = 0.6 |
| Unidirectional power converter efficiency | ηuni = 0.95 |
| Bidirectional power converter efficiency | ηbi = 0.9 |
| Supercapacitor efficiency | ηsc= 0.95 |
| Battery efficiency | ηB= 0.95 |
| Equipment | Value |
|---|---|
| Fuel cell | PrPC = 0.2 €/W |
| H2 storage system | Prst =0.24 €/Wh |
| Unidirectional power converter | Pruni = 0.056 €/W |
| Bidirectional power converter | Prbi = 0.067 €/W |
| Supercapacitors | Prsc = 2 × 10−3 €/Wh |
| Batteries | PrBat = 170 × 10−3 €/Wh |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Raga, C.; Barrado, A.; Miniguano, H.; Lazaro, A.; Quesada, I.; Martin-Lozano, A. Analysis and Sizing of Power Distribution Architectures Applied to Fuel Cell Based Vehicles. Energies 2018, 11, 2597. https://doi.org/10.3390/en11102597
Raga C, Barrado A, Miniguano H, Lazaro A, Quesada I, Martin-Lozano A. Analysis and Sizing of Power Distribution Architectures Applied to Fuel Cell Based Vehicles. Energies. 2018; 11(10):2597. https://doi.org/10.3390/en11102597
Chicago/Turabian StyleRaga, Carmen, Andres Barrado, Henry Miniguano, Antonio Lazaro, Isabel Quesada, and Alberto Martin-Lozano. 2018. "Analysis and Sizing of Power Distribution Architectures Applied to Fuel Cell Based Vehicles" Energies 11, no. 10: 2597. https://doi.org/10.3390/en11102597
APA StyleRaga, C., Barrado, A., Miniguano, H., Lazaro, A., Quesada, I., & Martin-Lozano, A. (2018). Analysis and Sizing of Power Distribution Architectures Applied to Fuel Cell Based Vehicles. Energies, 11(10), 2597. https://doi.org/10.3390/en11102597