Flux-Switching Permanent Magnet Machine with Phase-Group Concentrated-Coil Windings and Cogging Torque Reduction Technique


Abstract
:1. Introduction
2. FSPMM with PGCC Windings and Analysis Model
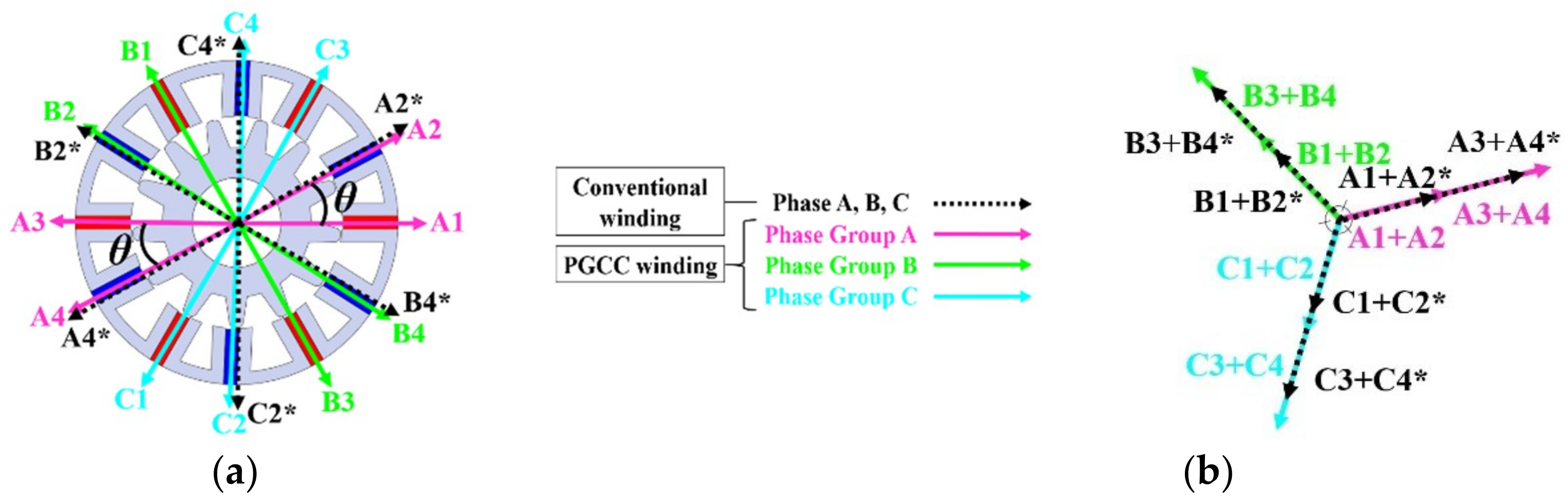
2.1. FSPMM with PGCC Windings
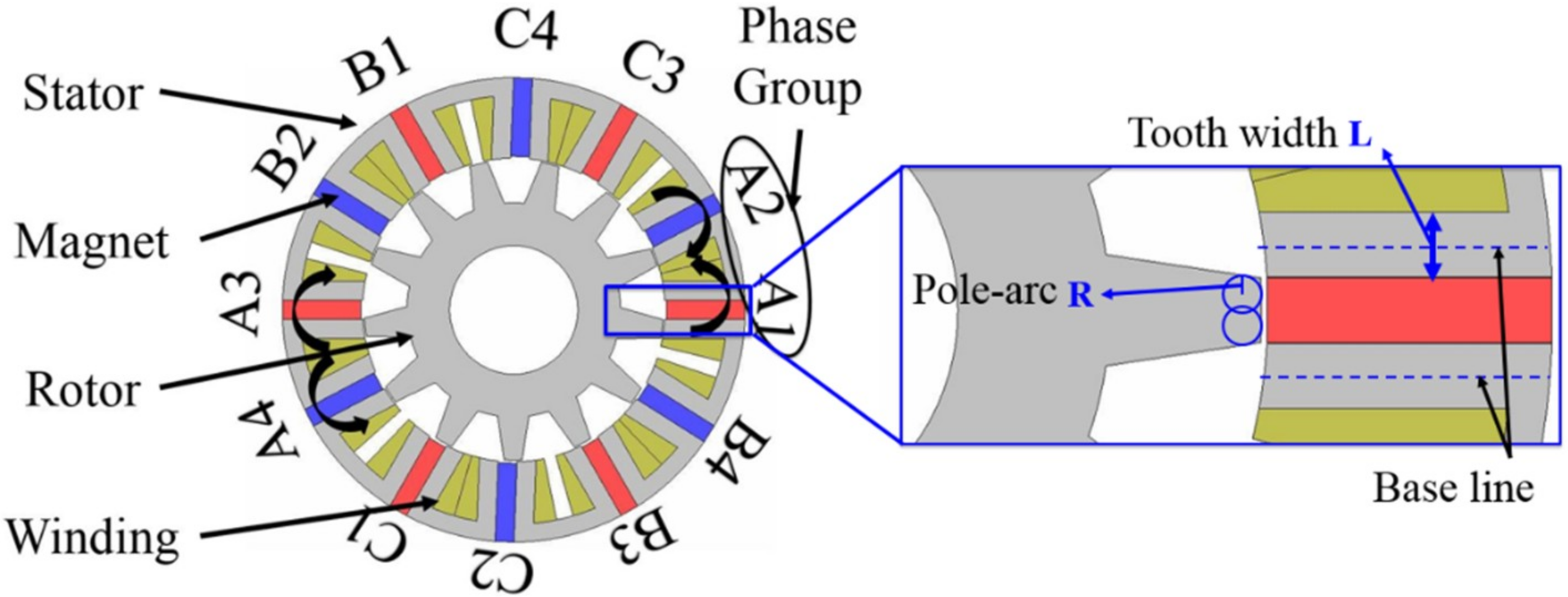
2.2. Analysis Models
3. Performance Evaluation Using Finite Element Analysis
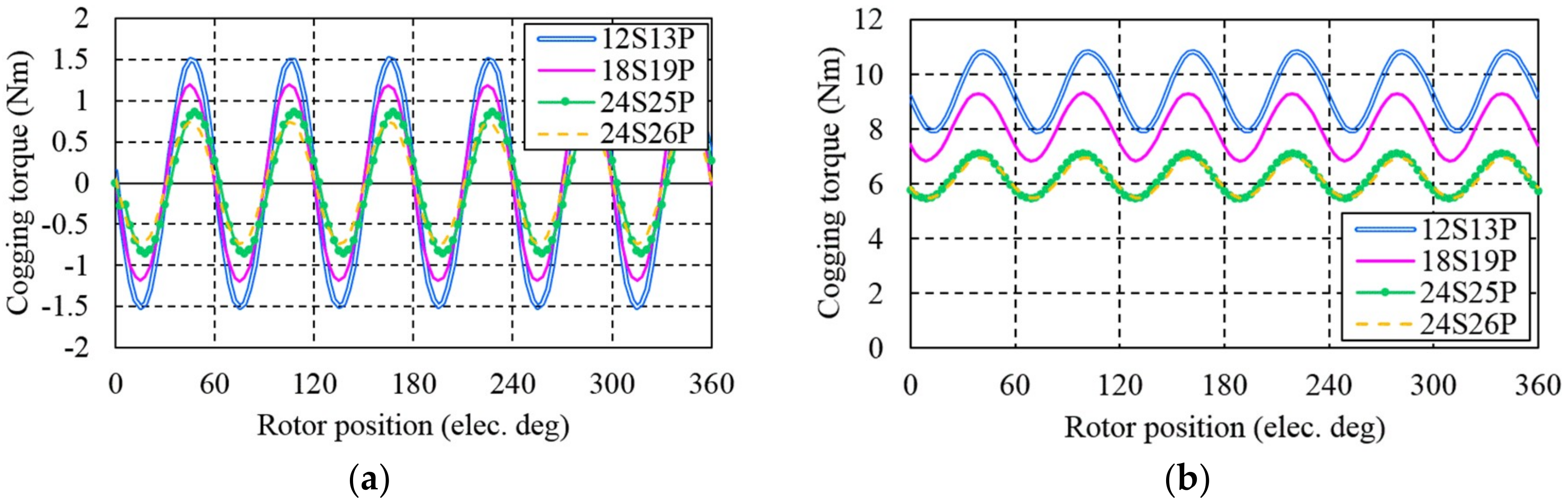
3.1. Cogging Torque and Torque
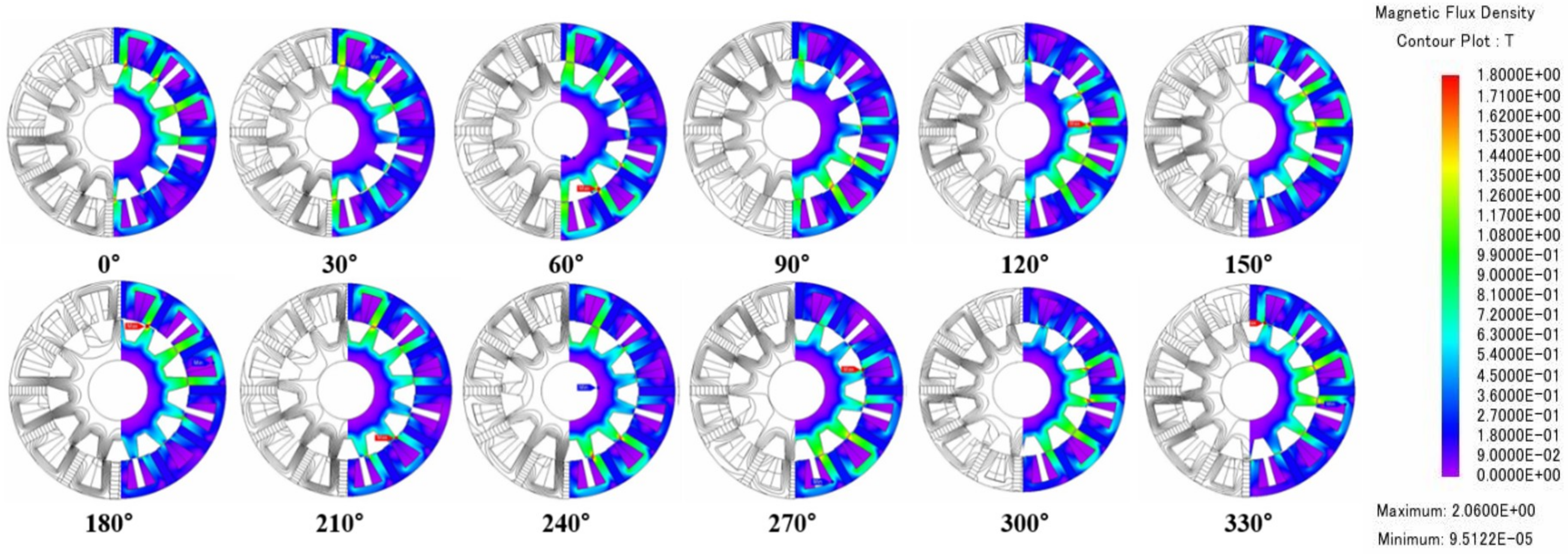
3.2. Flux Line and Flux Density
4. Optimization for Cogging Torque Reduction
4.1. Cogging Torque Reduction Technique
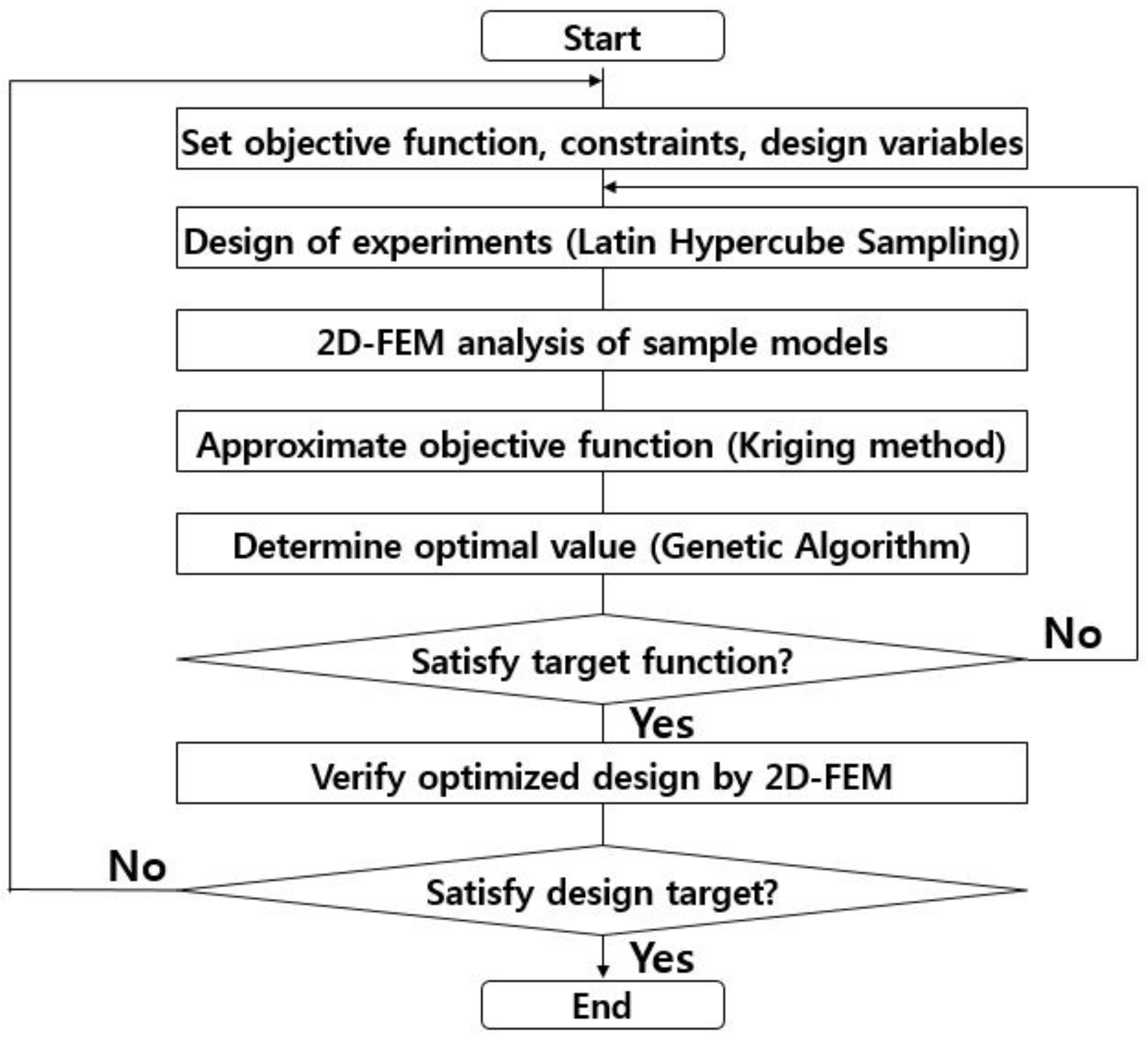
4.2. Optimization
4.3. Objective Function, Constraints, and Design Variables
- Objective function
- Constraint
- Design variables
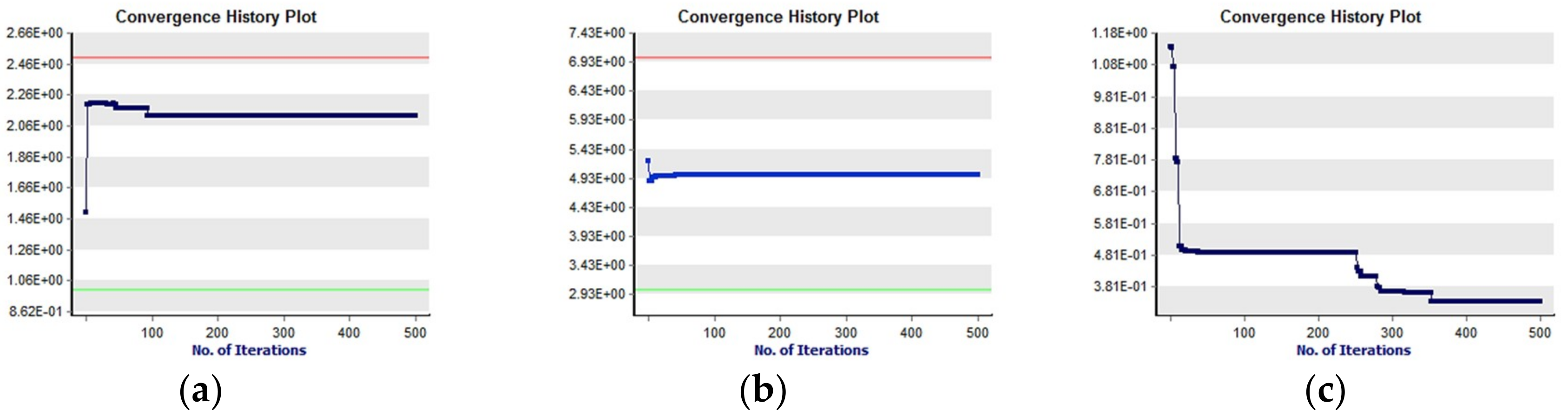
4.4. Optimization Results
5. Prototype Experiment and Discussion
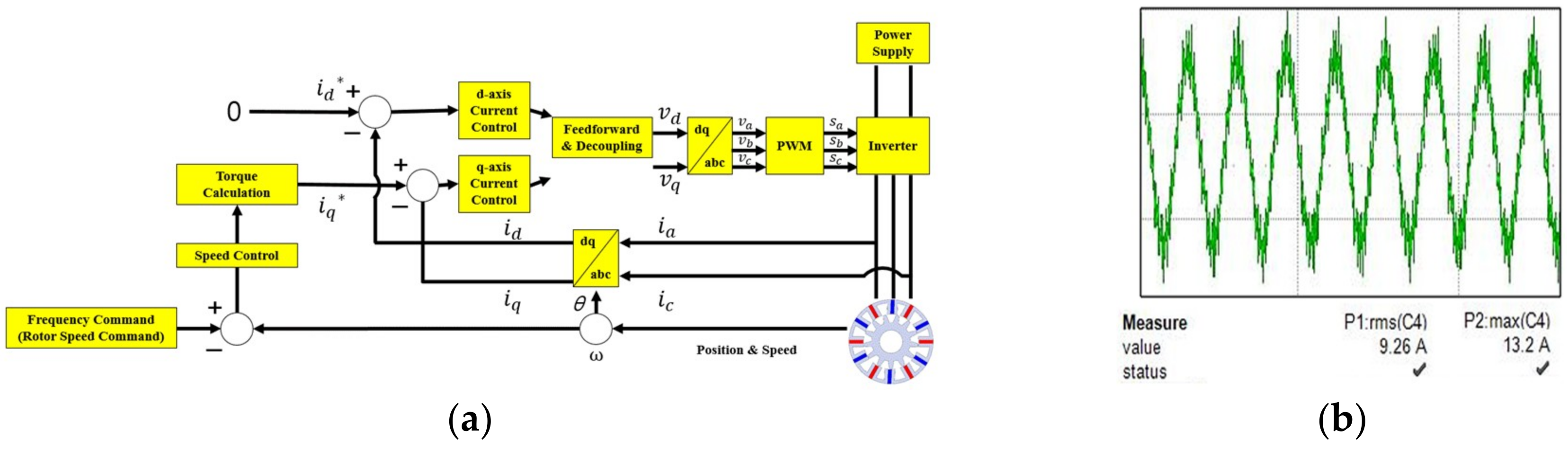
5.1. Experimental Setup and Control Method
5.2. Experimental Results and Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhu, Z.Q. Switched Flux Permanent Magnet Machines—Innovation Continues. In Proceedings of the International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–10. [Google Scholar]
- Zhao, W.; Lipo, T.A.; Kwon, B.I. A Novel Dual-Rotor, Axial Field, Fault-Tolerant Flux-Switching Permanent Magnet Machine with High-Torque Performance. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Liu, X.; Wu, D.; Zhu, Z.Q.; Pride, A.; Deodhar, R.P.; Sasaki, T. Efficiency Improvement of Switched Flux PM Memory Machine Over Interior PM Machine for EV/HEV Applications. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Li, Y.; Bobba, D.; Sarlioglu, B. A Novel 6/4 Flux-Switching Permanent Magnet Machine Designed for High-Speed Operations. IEEE Trans. Magn. 2016, 52, 1–9. [Google Scholar] [CrossRef]
- Zhu, X.; Shu, Z.; Quan, L.; Xiang, Z.; Pan, X. Multi-Objective Optimization of an Outer-Rotor V-Shaped Permanent Magnet Flux Switching Motor Based on Multi-Level Design Method. IEEE Trans. Magn. 2016, 52, 1–8. [Google Scholar] [CrossRef]
- Zhu, X.; Xiang, Z.; Zhang, C.; Quan, L.; Du, Y.; Gu, W. Co-Reduction of Torque Ripple for Outer Rotor Flux-Switching PM Motor Using Systematic Multi-Level Design and Control Schemes. IEEE Trans. Ind. Electron. 2017, 64, 1102–1112. [Google Scholar] [CrossRef]
- Zhao, J.; Zheng, Y.; Zhu, C.; Liu, X.; Li, B. A Novel Modular-Stator Outer-Rotor Flux-Switching Permanent-Magnet Motor. Energies 2017, 10, 937. [Google Scholar] [CrossRef]
- Su, P.; Hua, W.; Wu, Z.; Han, P.; Cheng, M. Analysis of the Operation Principle for Rotor-Permanent-Magnet Flux-Switching Machines. IEEE Trans. Ind. Electron. 2018, 65, 1062–1073. [Google Scholar] [CrossRef]
- Cao, R.; Jin, Y.; Lu, M.; Zhang, Z. Quantitative Comparison of Linear Flux-Switching Permanent Magnet Motor with Linear Induction Motor for Electromagnetic Launch System. IEEE Trans. Ind. Electron. 2018, 65, 7569–7578. [Google Scholar] [CrossRef]
- Bobba, D.; Li, Y.; Sarlioglu, B. Harmonic Analysis of Low-Stator-Slot and Rotor-Pole Combination FSPM Machine Topology for High Speed. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Hua, W.; Cheng, M.; Zhu, Z.Q.; Zhao, W.; Kong, X. Comparison of electromagnetic performance of brushless motors having magnets in stator and rotor. J. Appl. Phys. 2008, 103, 07F124. [Google Scholar] [CrossRef]
- Wang, D.; Wang, X.; Jung, S.Y. Reduction on Cogging Torque in Flux-Switching Permanent Magnet Machine by Teeth Notching Schemes. IEEE Trans. Magn. 2012, 48, 4228–4231. [Google Scholar] [CrossRef]
- Sikder, C.; Husain, I.; Ouyang, W. Cogging Torque Reduction in Flux-Switching Permanent-Magnet Machines by Rotor Pole Shaping. IEEE Trans. Ind. Appl. 2015, 51, 3609–3619. [Google Scholar] [CrossRef]
- Hao, L.; Lin, M.; Xu, D.; Zhang, W. Cogging Torque Reduction of Axial Field Flux-Switching Permanent Magnet Machine by Adding Magnetic Bridge in Stator Tooth. IEEE Tran. Appl. Supercond. 2014, 24, 1–5. [Google Scholar] [CrossRef]
- Jia, H.; Cheng, M.; Hua, W.; Zhao, W.; Li, W. Torque Ripple Suppression in Flux-Switching PM Motor by Harmonic Current Injection Based on Voltage Space-Vector Modulation. IEEE Trans. Magn. 2010, 46, 1527–1530. [Google Scholar] [CrossRef]
- Kim, J.M.; Yoon, M.H.; Hong, J.P.; Kim, S.I. Analysis of Cogging Torque Caused by Manufacturing Tolerances of Surface-mounted Permanent Magnet Synchronous Motor for Electric Power Steering. IET Electr. Power Appl. 2016, 10, 691–696. [Google Scholar] [CrossRef]
- Thomas, A.; Zhu, Z.Q.; Jewell, G.W.; Howe, D. Flux-switching PM Brushless Machines with Alternative stator and rotor pole combinations. In Proceedings of the IEEE ICEMS, Wuhan, China, 17–20 October 2008; pp. 2986–2991. [Google Scholar]
- Yoon, K.Y.; Kwon, B.I. Optimal Design of a New Interior Permanent Magnet Motor Using a Flared-Shape Arrangement of Ferrite Magnets. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Al-Ani, M.M.J.; Zhu, Z.Q. Influence of End-effect on Torque-speed Characteristics of Various Switched Flux Permanent Magnet Machine Topologies. In Proceedings of the IEEE ICEMS, Hangzhou, China, 22–25 October 2014; pp. 2517–2523. [Google Scholar]
- Zhu, Z.Q.; Chen, J.T.; Pang, Y.; Howe, D.; Iwasaki, S.; Deodhar, R. Modeling of End-effect in Flux-switching Permanent Magnet Machines. In Proceedings of the IEEE ICEMS, Seoul, Korea, 8–11 October 2007; pp. 943–948. [Google Scholar]
- Mo, L.; Zhu, X.; Zhang, T.; Quan, L.; Wang, Y.; Huang, J. Temperature Rise Calculation of a Flux-Switching Permanent-Magnet Double-Rotor Machine Using Electromagnetic-Thermal Coupling Analysis. IEEE Trans. Magn. 2018, 54, 1–4. [Google Scholar] [CrossRef]
- Zhao, W.; Chen, D.; Lipo, T.A.; Kwon, B.I. Dual Airgap Stator- and Rotor-Permanent Magnet Machines with Spoke-Type Configurations Using Phase-Group Concentrated Coil Windings. IEEE Tran. Ind. Appl. 2017, 53, 3327–3335. [Google Scholar] [CrossRef]
- Zhu, X.; Hua, W.; Wu, Z.; Huang, W.; Zhang, H.; Cheng, M. Analytical Approach for Cogging Torque Reduction in Flux-Switching Permanent Magnet Machines Based on Magnetomotive Force-Permeance Model. IEEE Trans. Ind. Electron. 2018, 65, 1965–1979. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Combinations | ||
|---|---|---|
| 2 | 2 | 12S13P |
| 3 | 2 | 18S19P |
| 4 | 2 | 24S25P |
| 2 | 4 | 24S26P |
| Item | Unit | PGCC FSPMM |
|---|---|---|
| Outer diameter | mm | 135 |
| Inner diameter | mm | 85 |
| Axial length | mm | 85 |
| Air-gap radial thickness | mm | 0.5 |
| Phase coil turns | - | 96 |
| Magnet grade | - | Ferrite/0.43 T |
| Steel sheet | - | 50H440 |
| Rated current | A | 13 |
| Current density (RMS value) | Arms/mm2 | 4 |
| Slot area (small slot) | mm2 | 153.1 |
| Slot fill factor (small slot) | % | 35 |
| Rated speed | RPM | 1500 |
| Rated frequency | Hz | 325 |
| Rated torque | Nm | 8.2 |
| Item | Unit | 12S13P | 18S19P | 24S25P | 24S26P |
|---|---|---|---|---|---|
| Cogging torque | Nm | 3.01 | 2.03 | 1.46 | 1.26 |
| Torque ripple | % | 33.37 | 30.66 | 26.47 | 23.61 |
| Average torque | Nm | 9.02 | 8.02 | 6.67 | 6.60 |
| Item | Unit | Initial | Optimized |
|---|---|---|---|
| R | mm | 1.5 | 2.08 |
| L | mm | 5.32 | 5 |
| Item | Unit | Initial | Optimized (2D-FEM) | Optimized (3D-FEM) |
|---|---|---|---|---|
| Back-EMF | Vrms | 52.81 | 47.34 | 45.76 |
| Cogging torque | Nm | 3.01 | 0.33 | 0.32 |
| Torque ripple | % | 33.37 | 9.20 | 9.12 |
| Average torque | Nm | 9.02 | 8.34 | 8.12 |
| Item | Unit | 2D-FEM | 3D-FEM | Experiment |
|---|---|---|---|---|
| Phase BEMF | Vrms | 47.34 | 45.76 | 44.6 |
| Cogging torque | Nm | 0.33 | 0.33 | 0.39 |
| Rated torque | Nm | 8.34 | 8.12 | 7.97 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, J.-W.; Lee, J.-h.; Zhao, W.; Kwon, B.-I. Flux-Switching Permanent Magnet Machine with Phase-Group Concentrated-Coil Windings and Cogging Torque Reduction Technique. Energies 2018, 11, 2758. https://doi.org/10.3390/en11102758
Kwon J-W, Lee J-h, Zhao W, Kwon B-I. Flux-Switching Permanent Magnet Machine with Phase-Group Concentrated-Coil Windings and Cogging Torque Reduction Technique. Energies. 2018; 11(10):2758. https://doi.org/10.3390/en11102758
Chicago/Turabian StyleKwon, Jung-Woo, Jin-hee Lee, Wenliang Zhao, and Byung-Il Kwon. 2018. "Flux-Switching Permanent Magnet Machine with Phase-Group Concentrated-Coil Windings and Cogging Torque Reduction Technique" Energies 11, no. 10: 2758. https://doi.org/10.3390/en11102758