Energy Modeling and Parameter Identification of Dual-Motor-Driven Belt Conveyors without Speed Sensors


Abstract
:1. Introduction
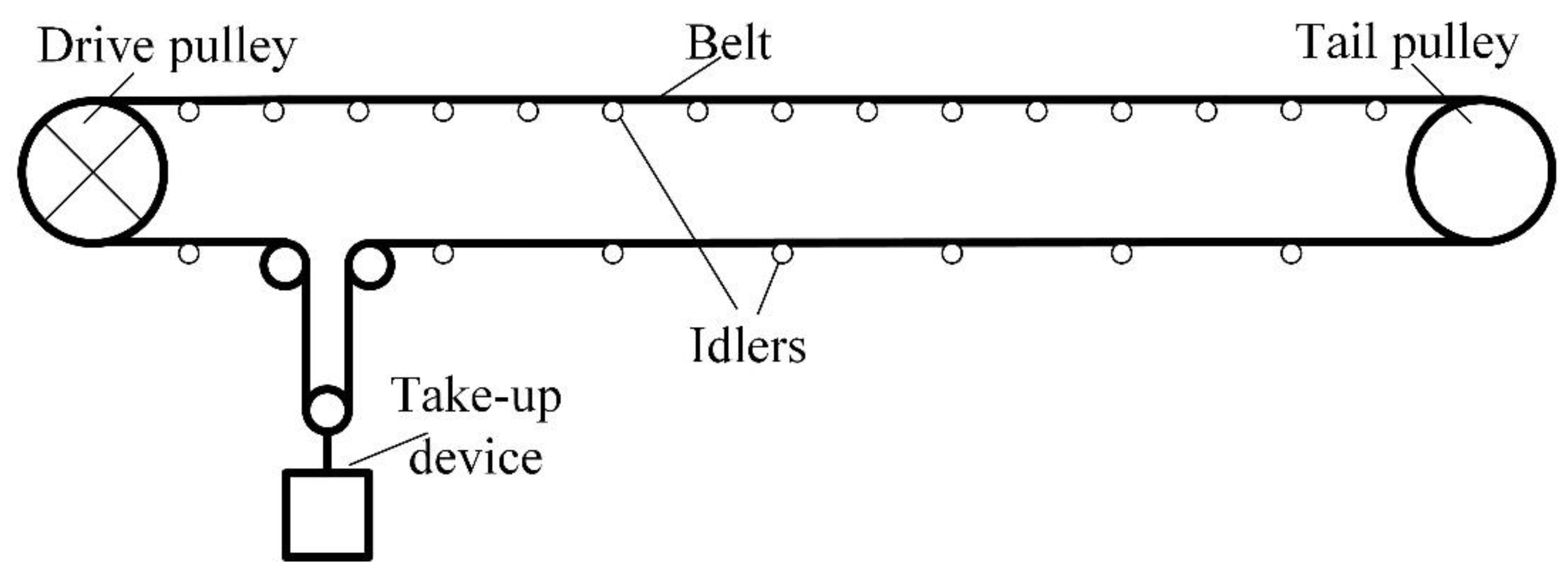
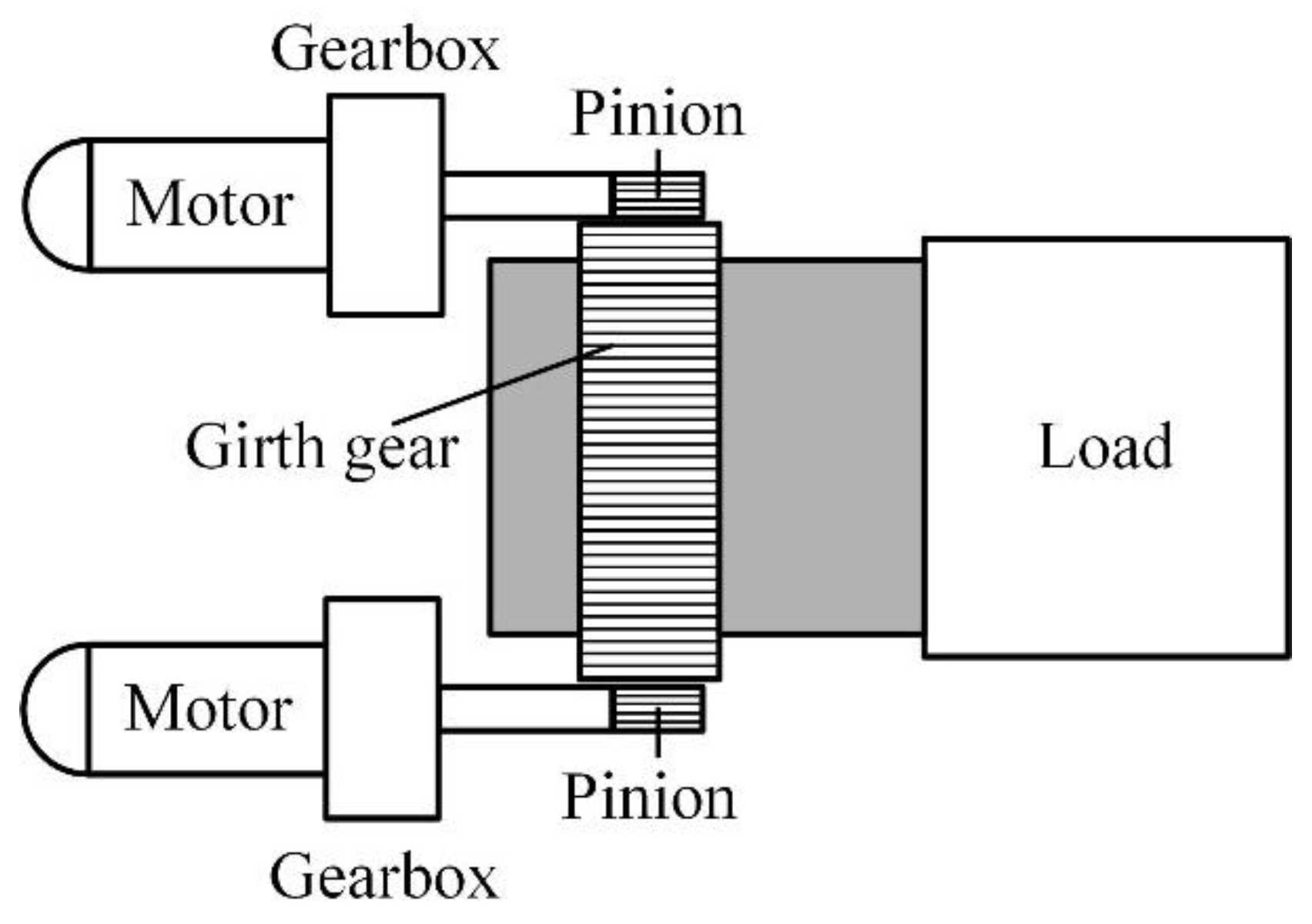
2. Energy Model
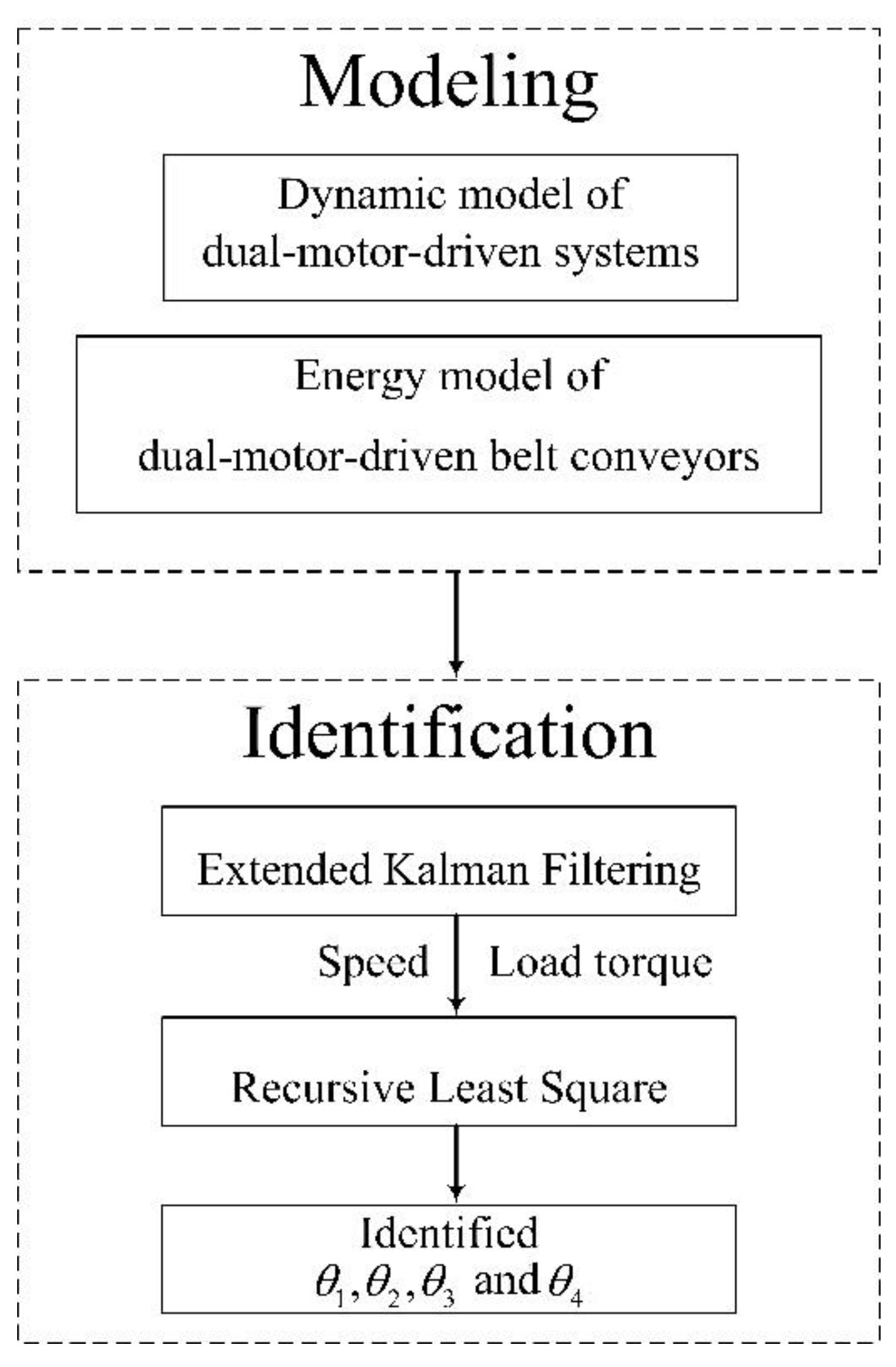
3. Parameter Identification
3.1. State Space Model of the Energy Model
3.2. Extended State Equation of the Energy Model
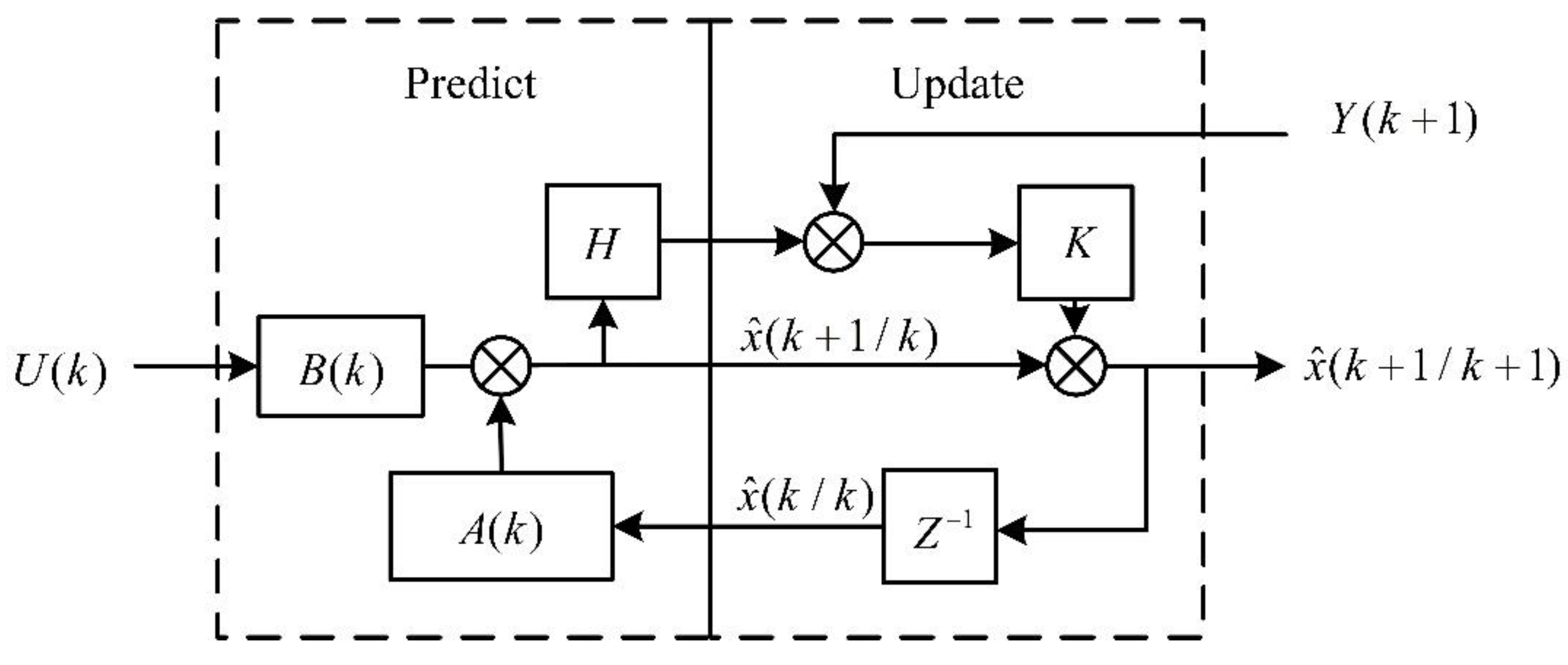
3.3. Parameter Identification of the Energy Model Based on EKF and RLS
- Prediction of state:where is the estimated state at , is the predicted state at .
- Estimation of error covariance matrix:where is the state error covariance at . is the predicted state error covariance. is the assumed process noise covariance.
- Computation of the Kalman filter gain:
- State Estimation:where is the output measurement of system at , is the predicted Jacobian matrix at .
- Update of the error covariance matrix:
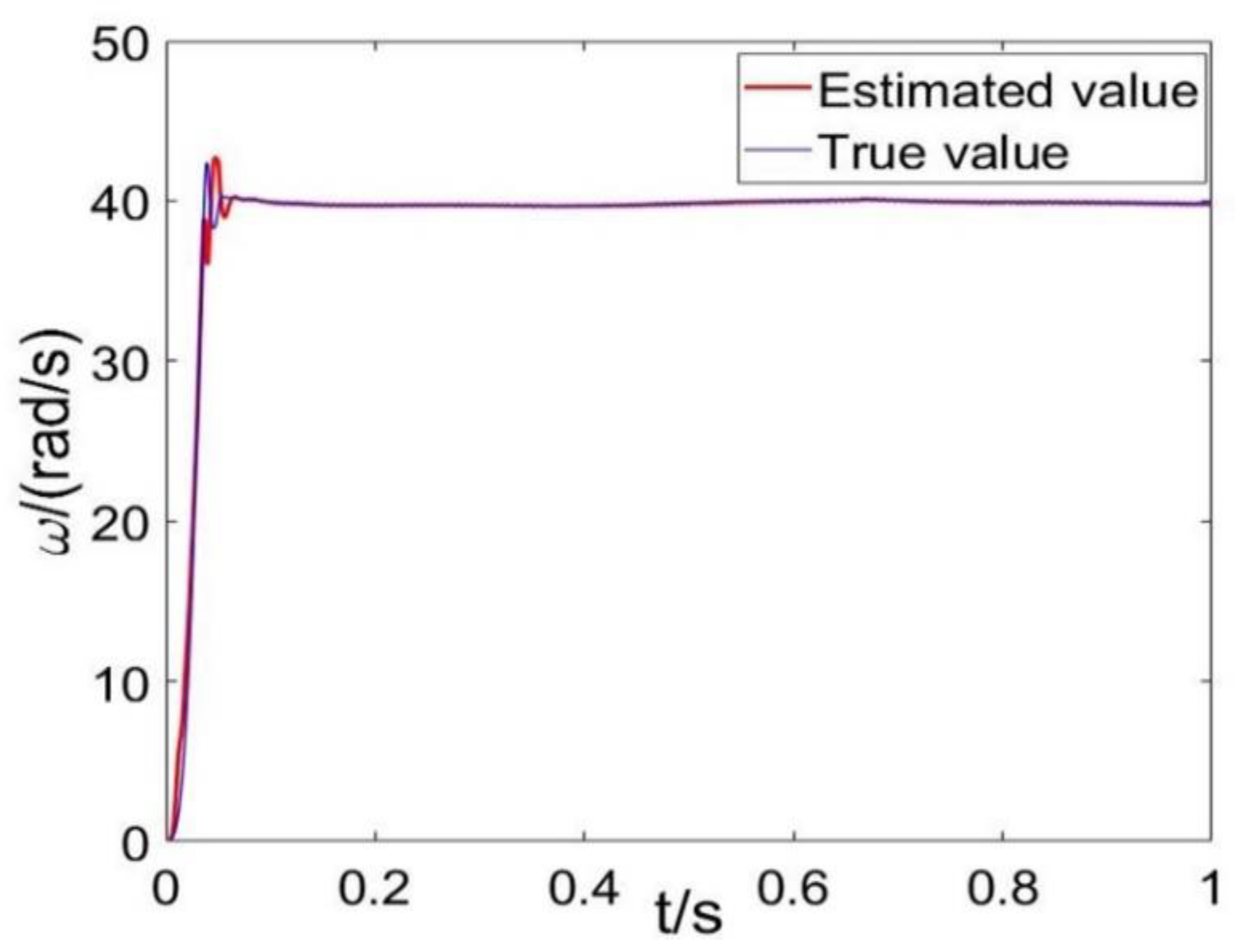
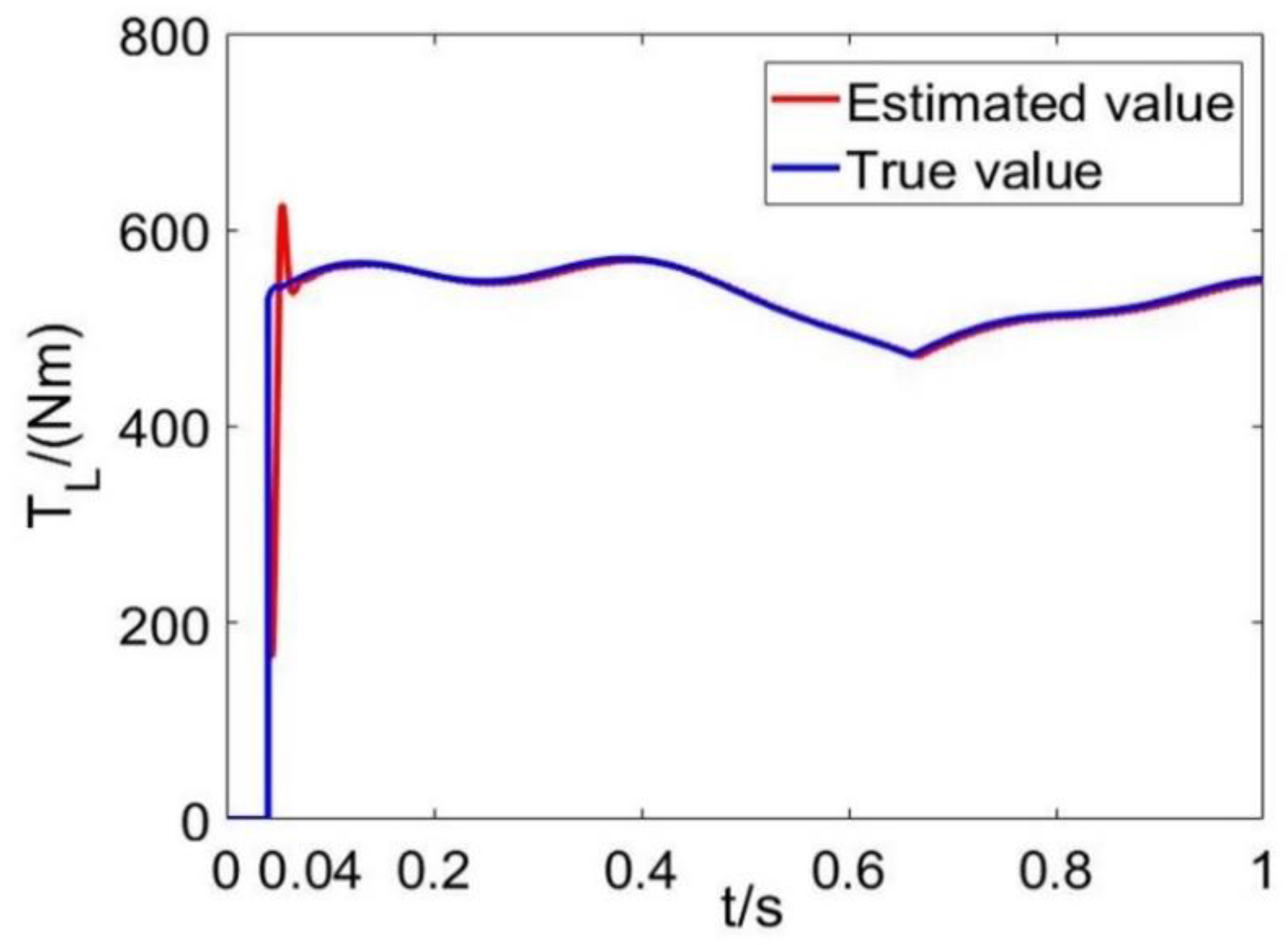
4. Simulation Study
5. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Song, W. General Belt Conveyor Design, 1st ed.; China Machine Press: Beijing, China, 2006; pp. 1–2. ISBN 7-111-18415-7. [Google Scholar]
- Pang, Y.S. Intelligent Belt Conveyor Monitoring and Control, 1st ed.; TU Delft: Delft, The Netherlands, 2010; pp. 1–2. ISBN 978–90-5584-134-9. [Google Scholar]
- Ristic, L.B.; Jeftenic, B.I. Implementation of fuzzy control to improve energy efficiency of variable speed bulk material transportation. IEEE Trans. Ind. Electron. 2012, 59, 2959–2969. [Google Scholar] [CrossRef]
- He, D.J.; Pang, Y.S.; Lodewijks, G. Speed control of belt conveyors during transient operation. Powder Technol. 2016, 301, 622–631. [Google Scholar] [CrossRef]
- Hiltermann, J.; Lodewijks, G.; Schott, D. A methodology to predict power savings of troughed belt conveyors by speed control. Part. Sci. Technol. 2011, 29, 14–27. [Google Scholar] [CrossRef]
- Zhang, S.R.; Xia, X.H. A new energy calculation model of belt conveyor. In Proceedings of the IEEE 2009 Green Innovation for African Renaissance, Nairobi, Kenya, 23–25 September 2009. [Google Scholar]
- Mathaba, T.; Xia, X. A parametric energy model for energy management of long belt conveyors. Energies 2015, 8, 13590–13608. [Google Scholar] [CrossRef]
- Marx, D.J.L.; Calmeyer, J.E. A case study of an integrated conveyor belt model for the mining industry. In Proceedings of the 7th Africon Conference in Africa, Gaborone, Botswana, 15–17 September 2004. [Google Scholar]
- Luo, J.; Huang, W.J.; Zhang, S.R. Energy cost optimal operation of belt conveyors using model predictive control methodology. J. Clean. Prod. 2015, 105, 196–205. [Google Scholar] [CrossRef]
- Halepoto, I.A.; Khaskheli, S. Modeling of an integrated energy efficient conveyor system model using belt loading dynamics. Indian J. Sci. Technol. 2016, 9, 47. [Google Scholar] [CrossRef]
- Zhang, Y. Belt Conveyor Energy-Saving Control System Technology Research. Master’s Thesis, Xi’an University of Science and Technology, Xi’an, China, 2014. [Google Scholar]
- Sun, W.; Wang, H.; Yang, H.Q. Research of energy-saving control system with frequency-conversion speed-regulation for belt conveyor. Ind. Mine Autom. 2013, 39, 98–101. [Google Scholar] [CrossRef]
- Xia, X.H.; Zhang, J. Control systems and energy efficiency from the POET perspective. In Proceedings of the IFAC Conference on Control Methodologies and Technology for Energy Efficiency, Vilamoura, Portugal, 29–31 March 2010. [Google Scholar]
- Shen, Y.J.; Xia, X.H. Adaptive parameter estimation for an energy model of belt conveyor with DC motor. Asian J. Control 2014, 16, 1122–1132. [Google Scholar] [CrossRef]
- Middelberg, A.; Zhang, J.; Xia, X. An optimal control model for load shifting—With application in the energy management of a colliery. Appl. Energy 2009, 86, 1266–1273. [Google Scholar] [CrossRef]
- Hiltermann, J.; Lodewijks, G.; Rijsenbrij, J.C. Reducing the power consumption of troughed belt conveyors by speed control. In Proceedings of the 6th International Conference for Conveying and Handling of Particulate Solids, Queensland, Australia, 3–7 August 2009. [Google Scholar]
- Zhang, S.R.; Xia, X.H. Modeling and energy efficiency optimization of belt conveyors. Appl. Energy 2011, 88, 3061–3071. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.Y.; Li, H.; Che, Z.Y. Energy consumption modeling and parameter identification for double-motor driven coal mine belt conveyers. Control Theor. Appl. 2018, 35, 335–341. [Google Scholar] [CrossRef]
- Barut, M.; Bogosyan, S.; Gokasan, M. EKF based sensorless direct torque control of IMs in the low speed range. In Proceedings of the IEEE International Symposium on Industrial Electronics, Dubrovnik, Croatia, 20–23 June 2005. [Google Scholar]
- Maes, J.; Melkebeek, J.A. Speed-sensorless direct torque control of induction motors using an adaptive flux observer. IEEE Trans. Ind. Appl. 2000, 36, 778–785. [Google Scholar] [CrossRef]
- Kubota, K.; Matsuse, K. Speed sensorless field oriented control of induction motor with rotor resistance adaptation. In Proceedings of the Industry Applications Society Meeting, Ontario, TO, Canada, 2–8 October 1993. [Google Scholar]
- Wang, J. Study on the Speed Sensorless Vector Control of PMSM. Master’s Thesis, Huazhong University of Science and Technology, Wuhan, China, 2013. [Google Scholar]
- Barut, M.; Bogosyan, S.; Gokasan, M. Speed-sensorless estimation for induction motors using extended Kalman filters. IEEE Trans. Ind. Electr. 2007, 54, 272–280. [Google Scholar] [CrossRef]
- Christopoulos, G.A.; Safacas, A.N.; Zafiris, A. Energy savings and operation improvement of rotating cement kiln by the implementation of a unique new drive system. IET Electr. Power Appl. 2015, 10, 101–109. [Google Scholar] [CrossRef]
- Ruan, Y.; Chen, B.S. Control Systems of Electric Drives-Motion Control Systems, 4th ed.; China Machine Press: Beijing, China, 2012; pp. 179–180. ISBN 978–7-111-27746-0. [Google Scholar]
- Alsofyani, I.M.; Idris, N.R.N.; Jannati, M. Using NSGA II multiobjective genetic algorithm for EKF-based estimation of speed and electrical torque in AC induction machines. In Proceedings of the Power Engineering and Optimization Conference, Langkawi, Malaysia, 24–25 March 2014. [Google Scholar]
- Barut, M.; Bogosyan, S.; Gokasan, M. Experimental evaluation of braided EKF for sensorless control of induction motors. IEEE Trans. Ind. Electr. 2008, 55, 620–632. [Google Scholar] [CrossRef]
- Liu, Y.; Sun, Z. EKF-based adaptive sensor scheduling for target tracking. In Proceedings of the International Symposium on Information Science and Engineering, Shanghai, China, 20–22 December 2008. [Google Scholar]
- Qiang, M.H.; Zhang, J.E. RLS parameter identification and emulate based on matlab/simulink. Autom. Instrum. 2008, 6, 4–5. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0.069 H | 0.070 H | ||
| 0.071 H | 0.073 H | ||
| 0.079 H | 0.080 H | ||
| 0.087 H/Ω | 0.088 H/Ω | ||
| 0.435 Ω | 0.437 Ω | ||
| 0.816 Ω | 0.815 Ω | ||
| 0.19 (N·m·s2) | 0.192 (N·m·s2) | ||
| 2 |
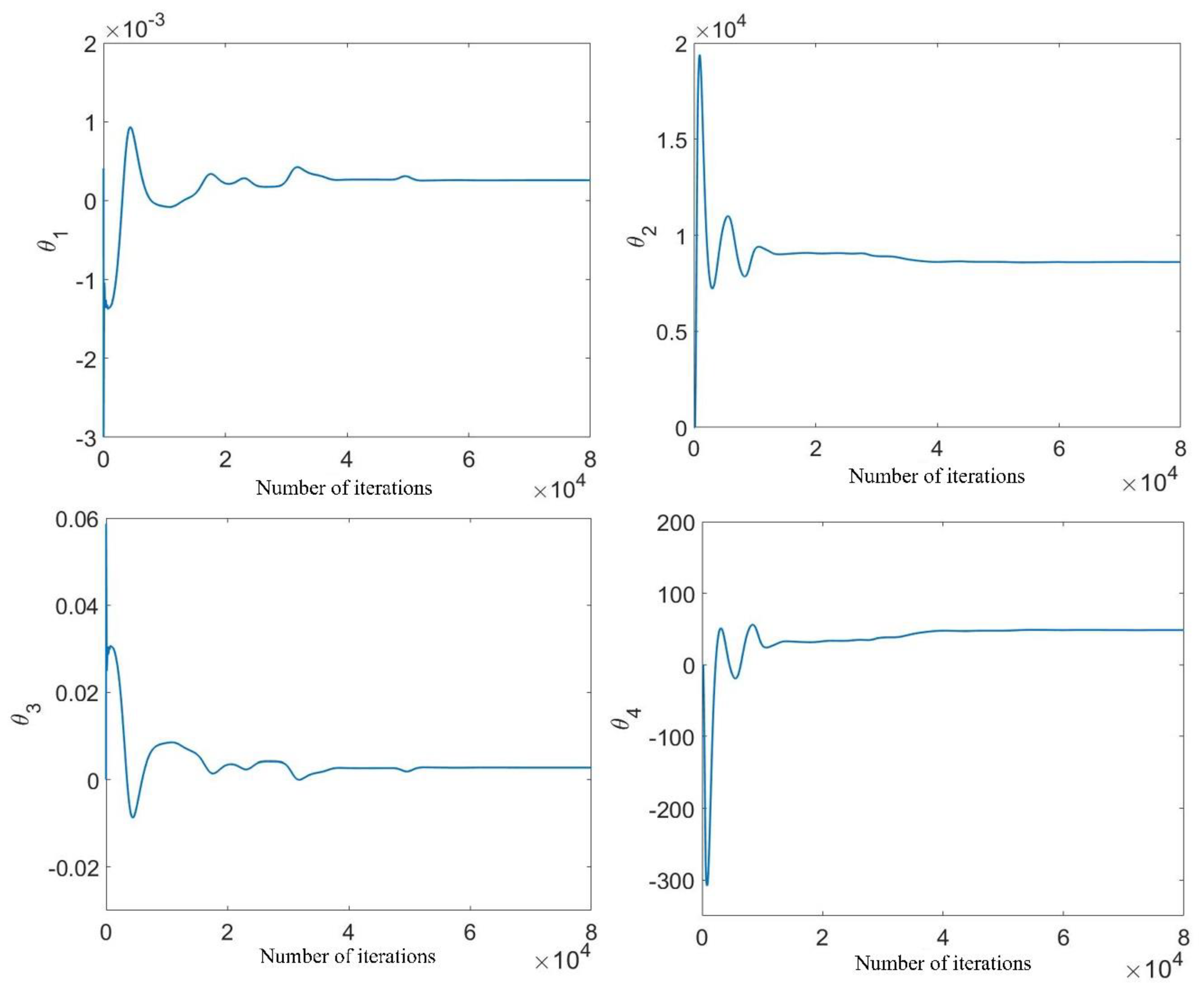
| Parameters | ||||
|---|---|---|---|---|
| Identified value | 8566.3 | 0.0031 | 51.6804 | |
| True value | 8550.9 | 0.0032 | 51.2986 | |
| error | 3% | 0.18% | 3.23% | 0.74% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Liu, J.; Li, H.; Zhou, L. Energy Modeling and Parameter Identification of Dual-Motor-Driven Belt Conveyors without Speed Sensors. Energies 2018, 11, 3313. https://doi.org/10.3390/en11123313
Yang C, Liu J, Li H, Zhou L. Energy Modeling and Parameter Identification of Dual-Motor-Driven Belt Conveyors without Speed Sensors. Energies. 2018; 11(12):3313. https://doi.org/10.3390/en11123313
Chicago/Turabian StyleYang, Chunyu, Jinhao Liu, Heng Li, and Linna Zhou. 2018. "Energy Modeling and Parameter Identification of Dual-Motor-Driven Belt Conveyors without Speed Sensors" Energies 11, no. 12: 3313. https://doi.org/10.3390/en11123313