Performance and Accuracy Investigation of the Two-Step Algorithm for Power System State and Line Temperature Estimation


Abstract
:1. Introduction
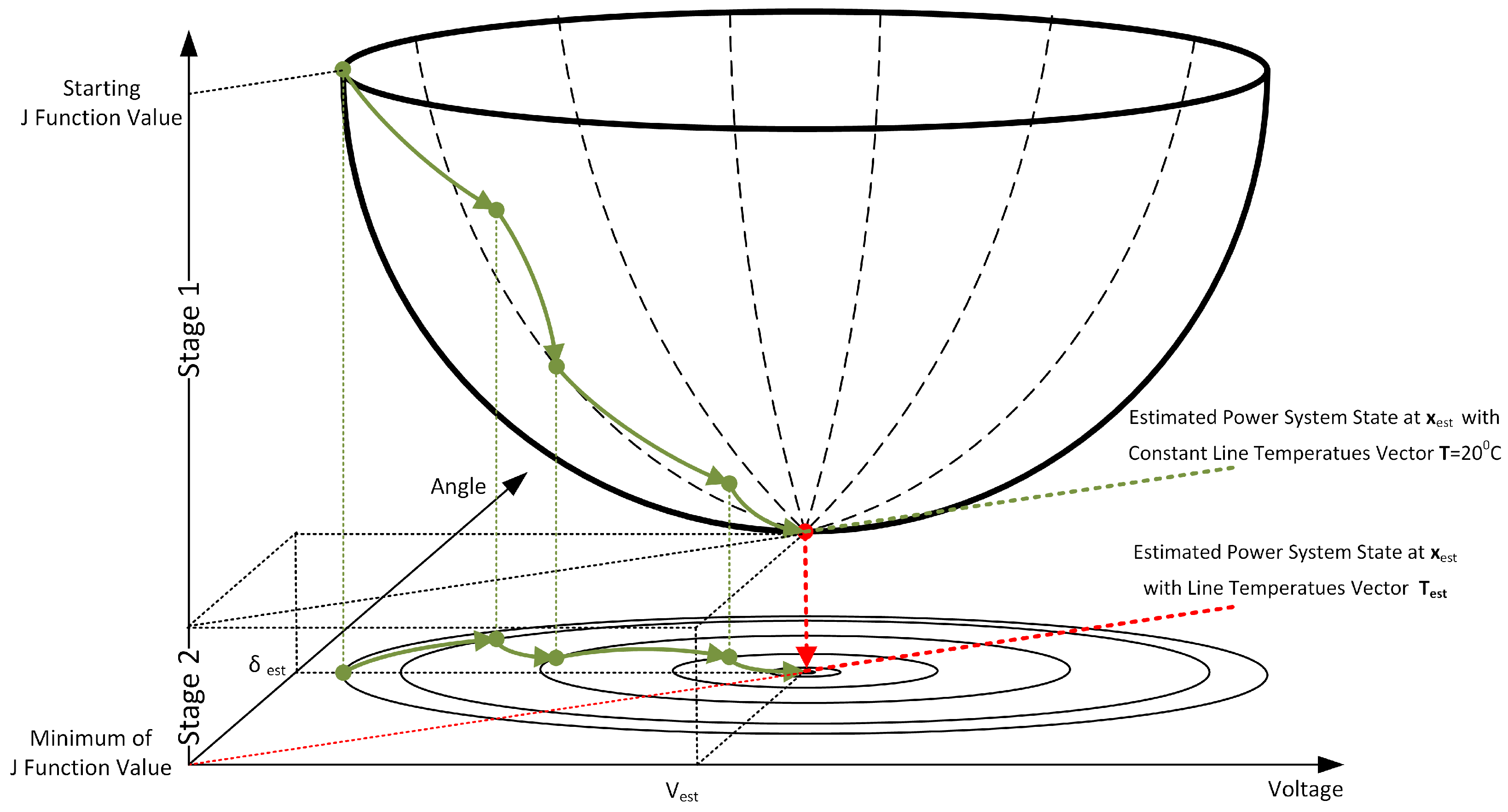
- The inaccuracy of the power system model results mainly from the actual temperatures of the operating conductors of the power line, which in the case of accurate measurements causes errors in the estimation of the state. Therefore, a two-stage method for estimating the power system state and line temperatures was proposed. The advantage of the presented algorithm is that it does not require any additional measurement data such as the measurement of current in a line conductor, weather information along the line from DLR systems or PMUs, which can be augmented in measurement function h and measurement Jacobian as proposed in [17].
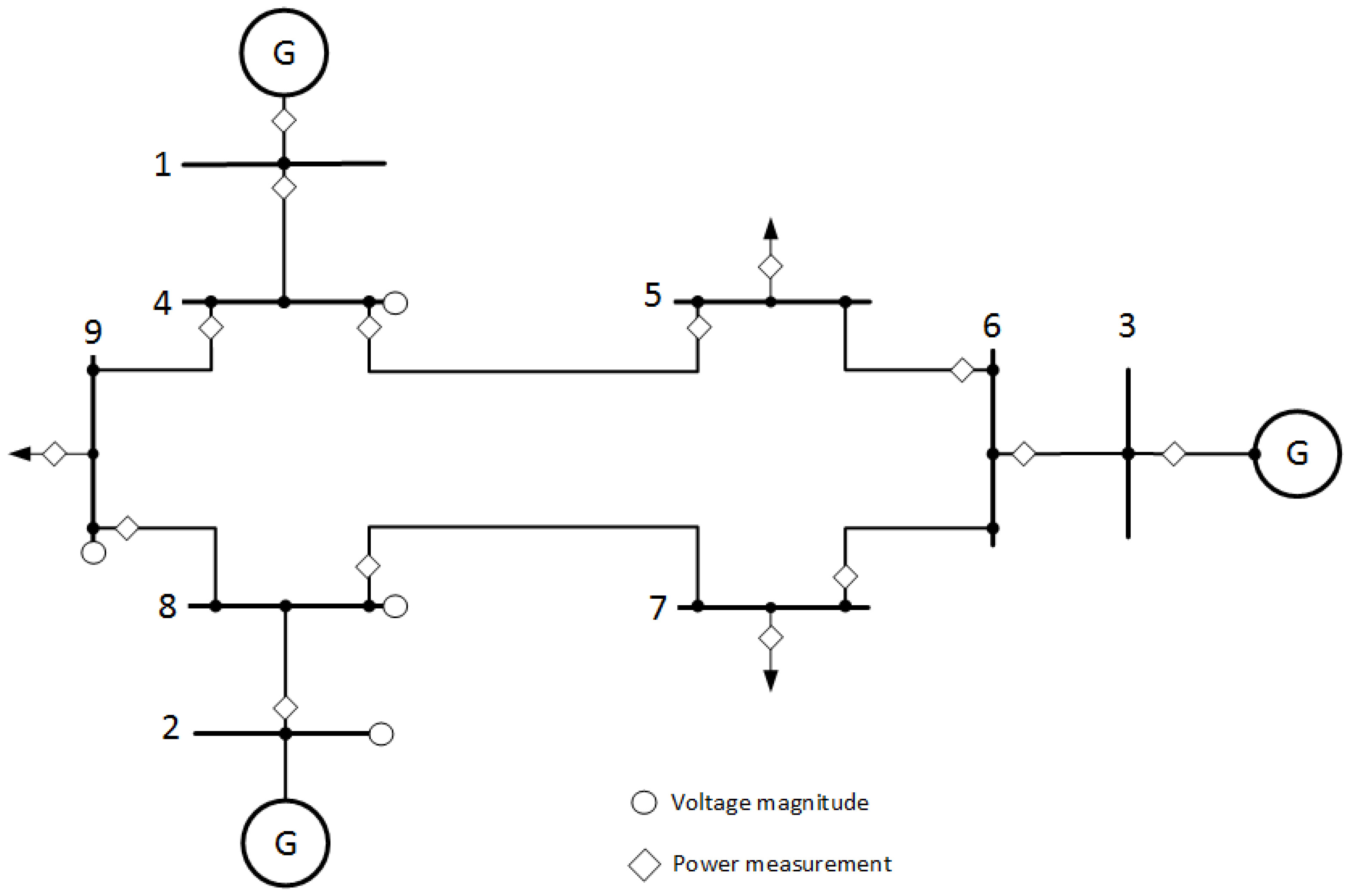
- A case study based on the IEEE 39 bus New England test system was presented, in which the power line temperatures have been calculated. Based on the achieved results, the two-step algorithm for power system state and line temperature estimation was applied, in order to better understand the algorithm structure and its operation.
- The performance and accuracy of the presented method have been been examined using different test system cases.
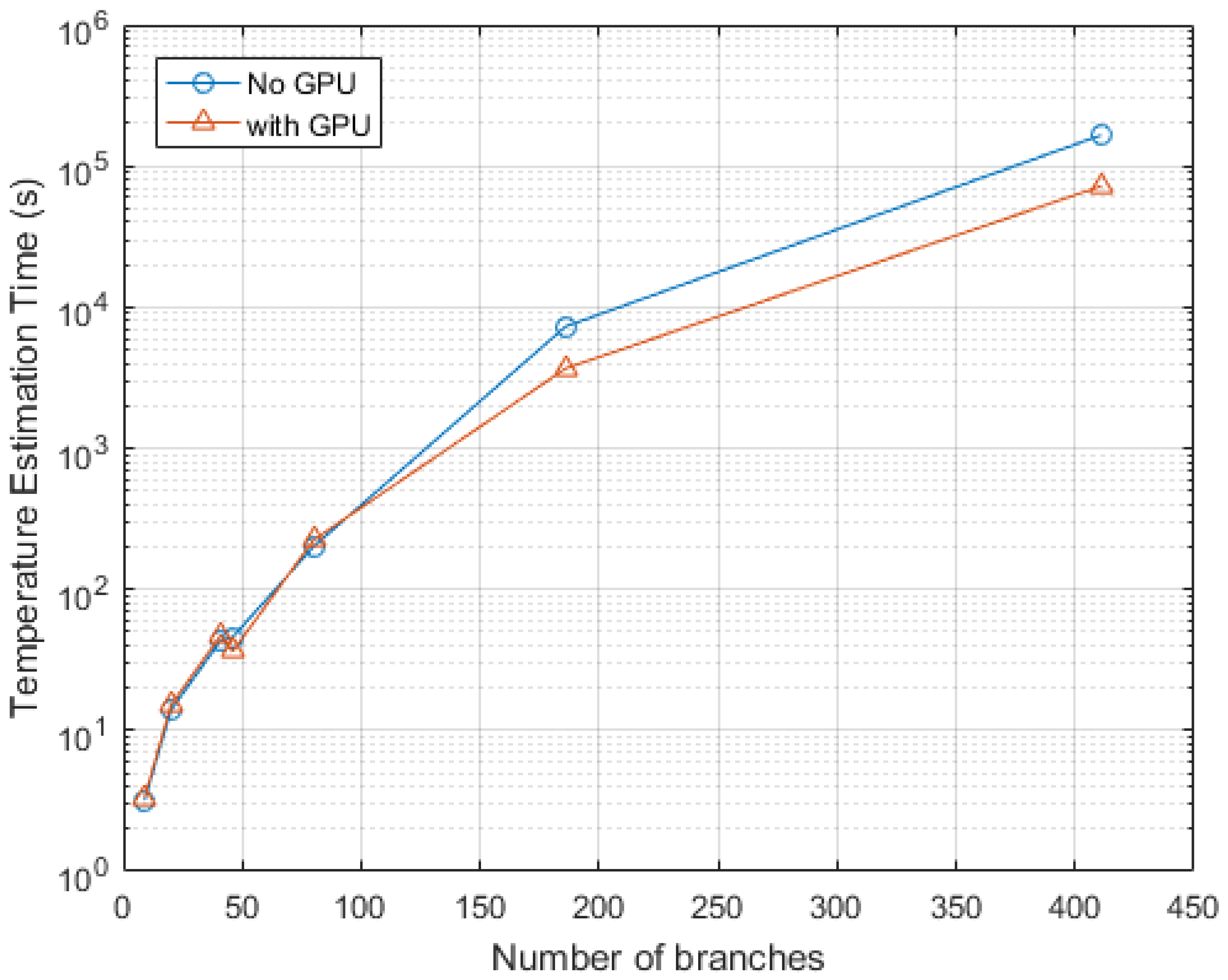
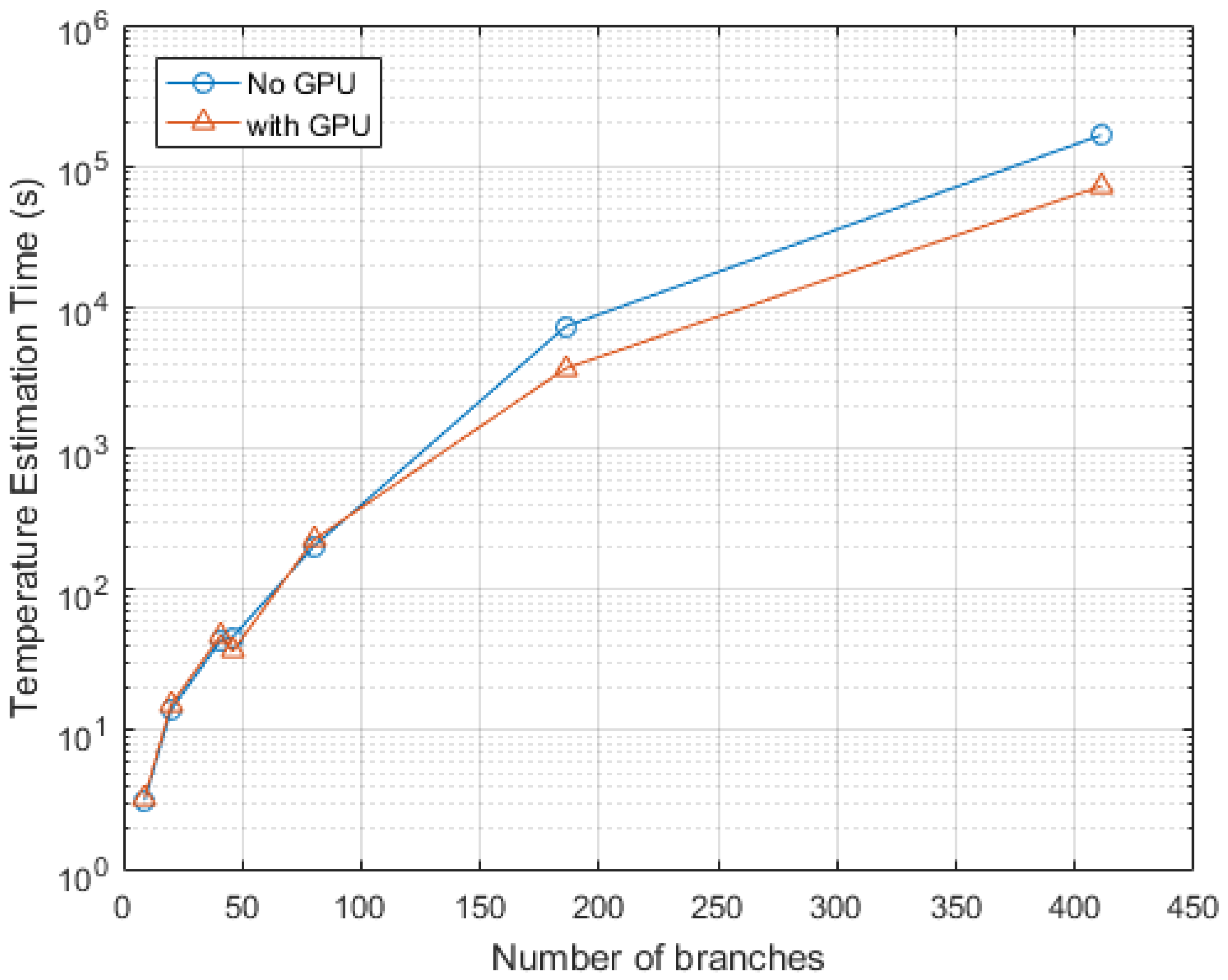
- The speed improvement of the presented algorithm estimating a larger power system model has been examined using graphical processing units. The example of modified MATPOWER code for using graphical processing units has been shown.
- The accuracy of the presented method has been examined as a function of instrument transformers classes.
2. Power System State Estimation
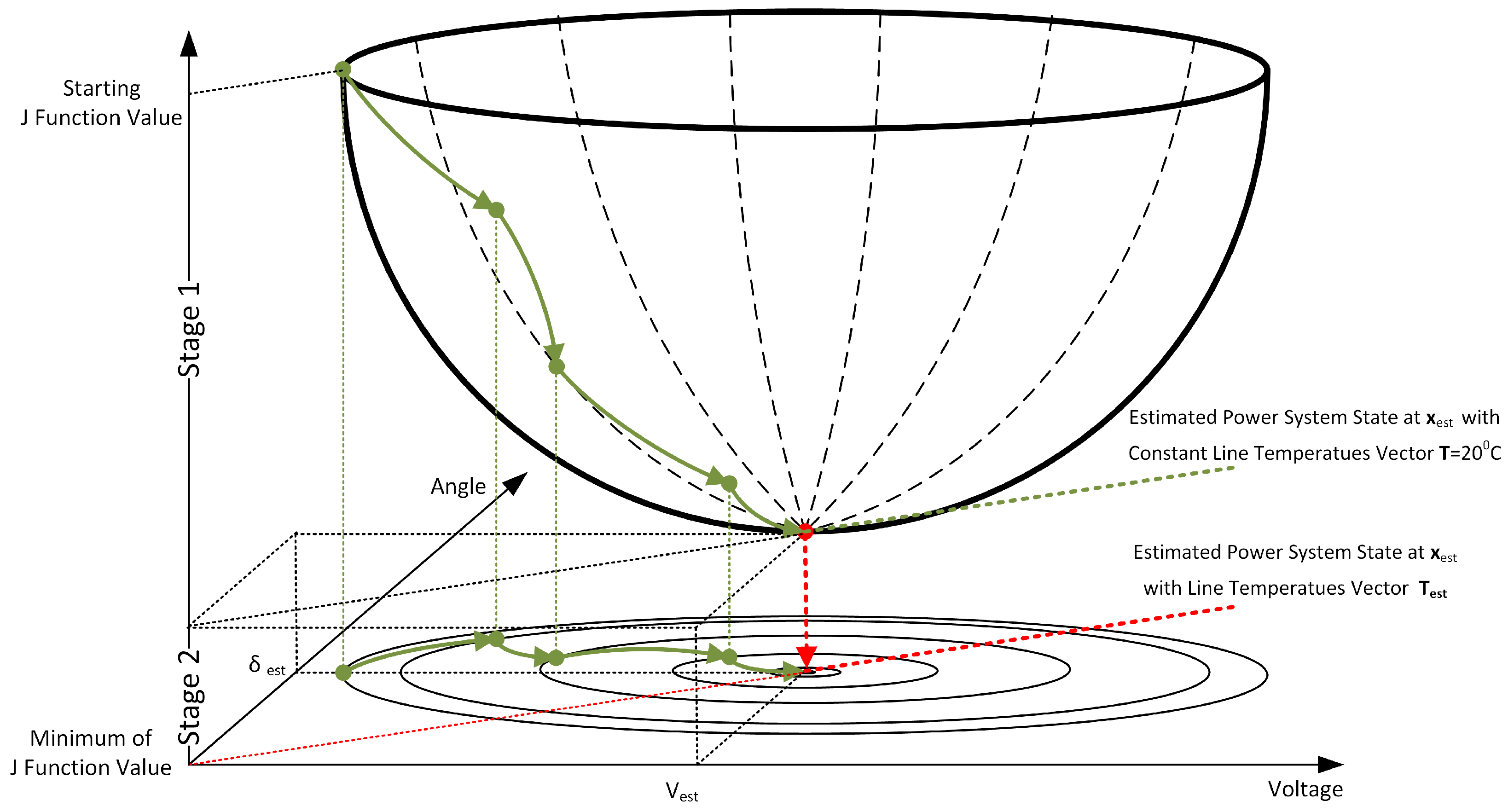
3. The Concept of the Two-Step Method for Power System State and Line Temperature Estimation
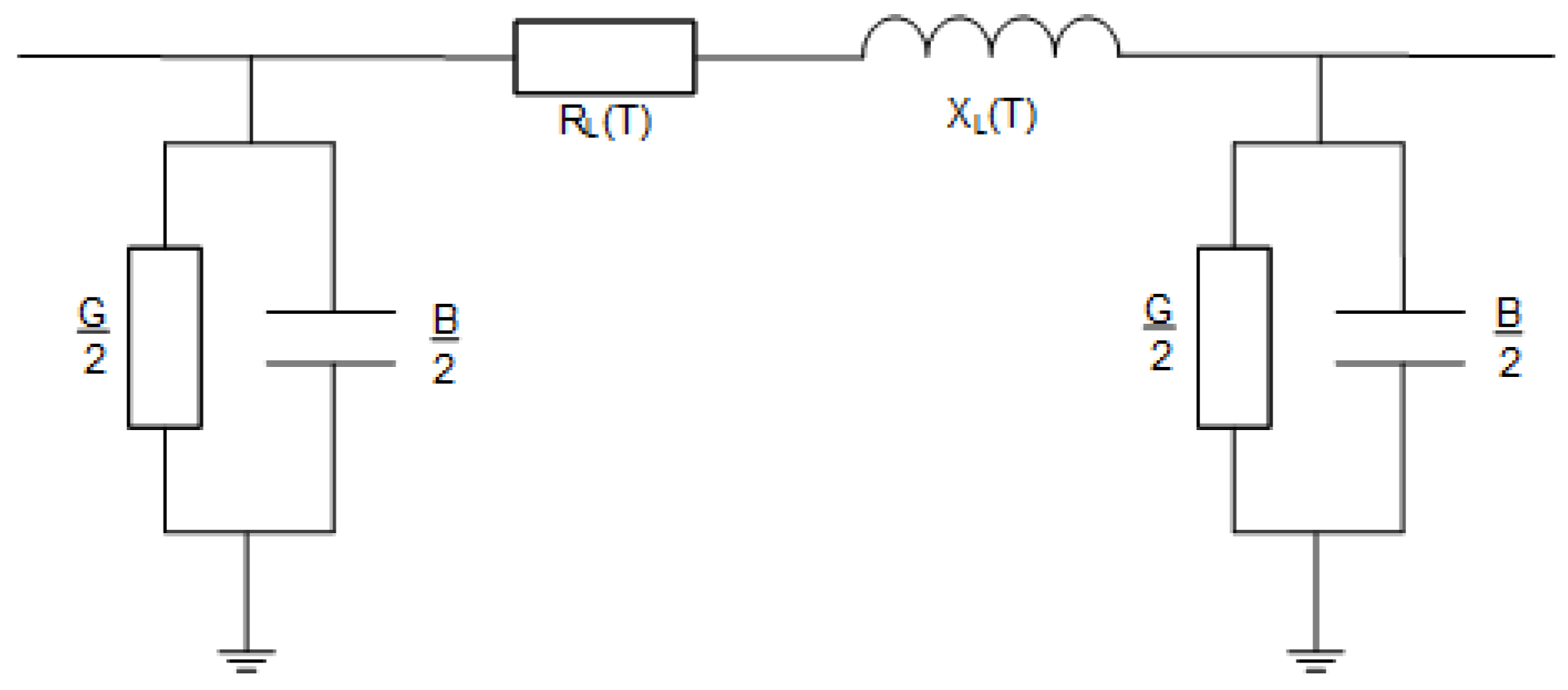
3.1. Incorporation of Estimated Line Temperatures into Power System Model
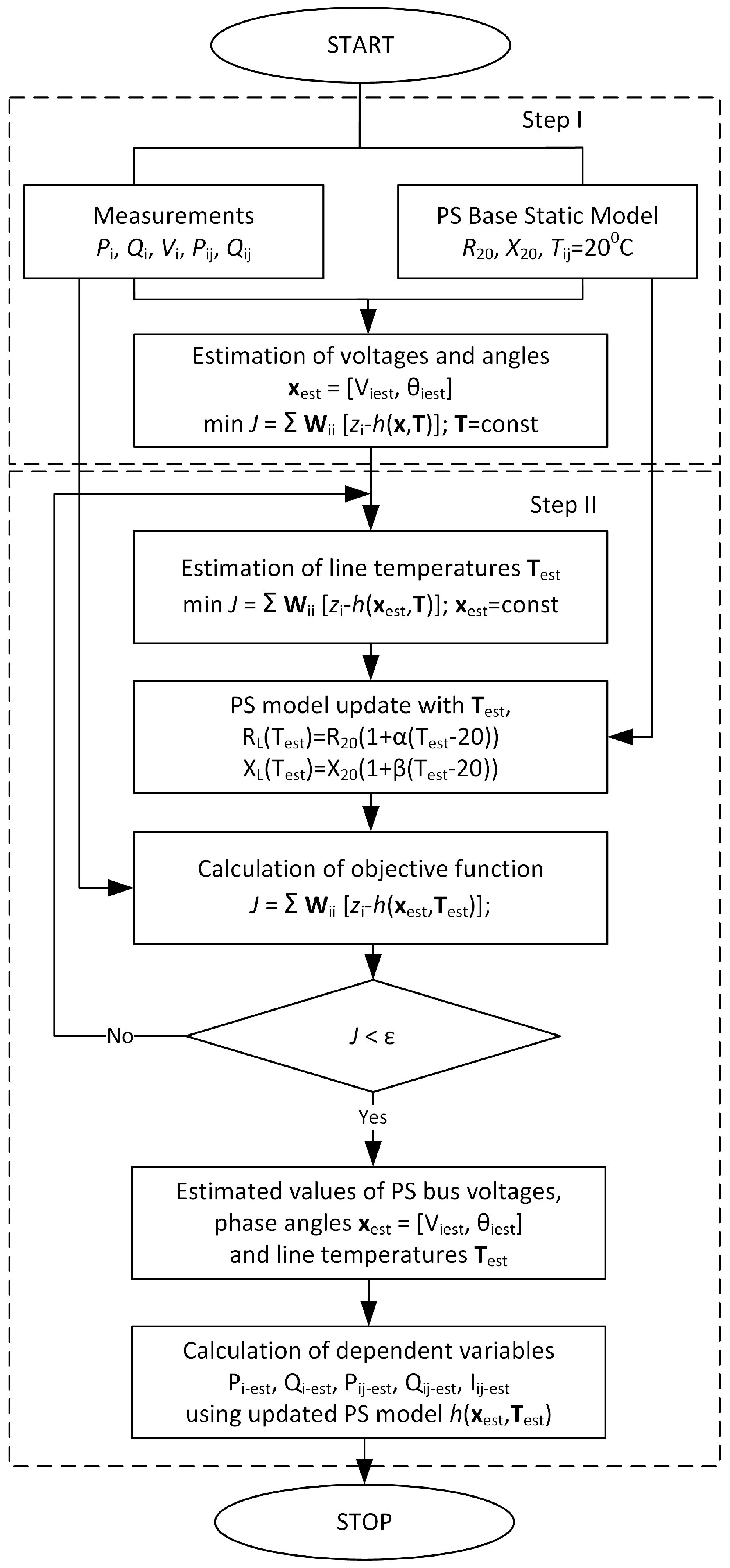
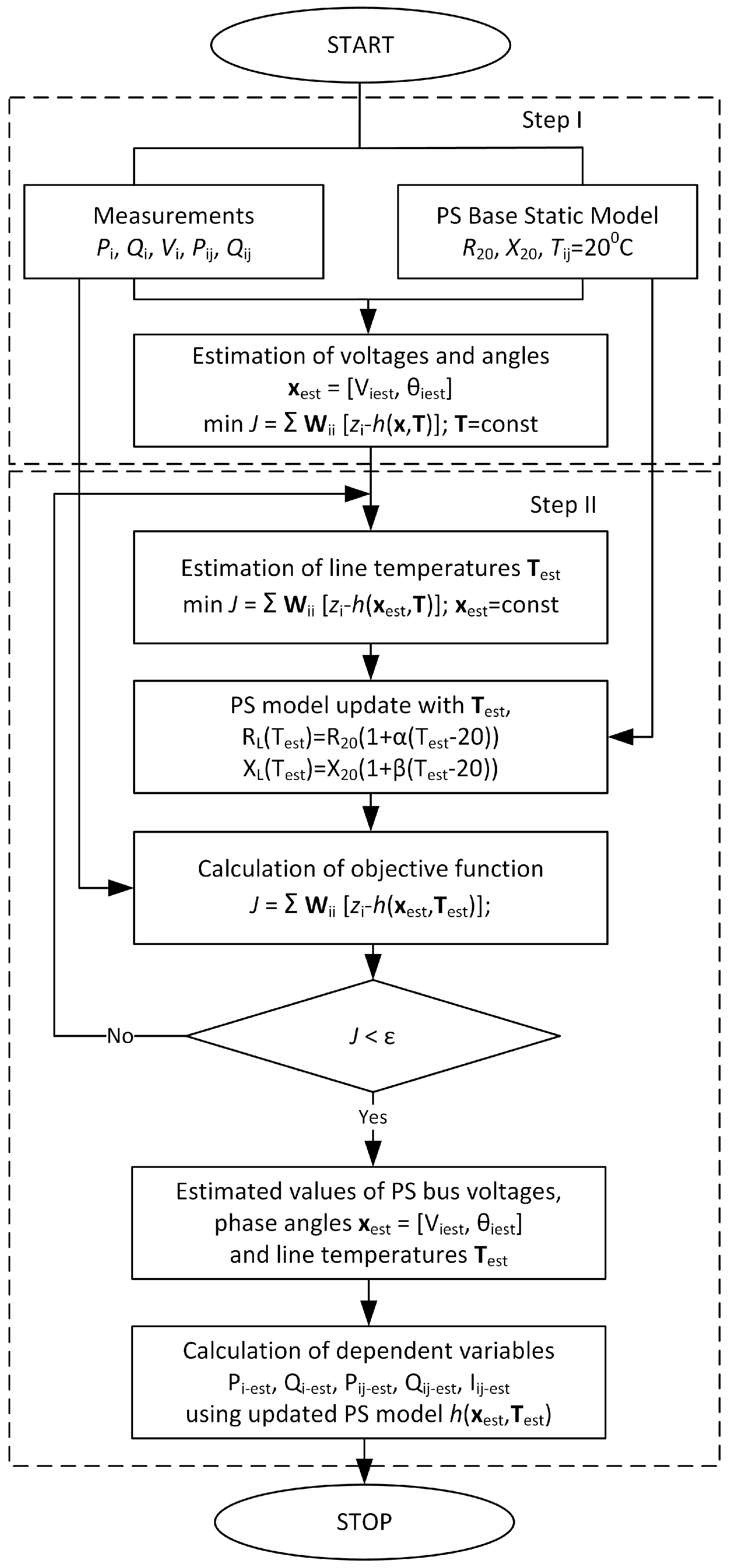
3.2. Implementation of the Two-Step Algorithm of Power System State and Line Temperature Estimation
4. Test System Simulation and State with the Line Temperatures Estimation
4.1. Algorithm Performance Testing and Timing Results
| Algorithm 1: Modified code of MATPOWER [33] State Estimation (SE) function doSE.m for performance improvement using Graphical Processing Unit (GPU). |
| ... |
| % --compute inverse R matrix on GPU |
| R_inv = gpuArray(diag(1./sigma_square)); |
| ... |
| --construct H matrix on GPU |
| H = gpuArray(H); |
| %--compute update step on GPU |
| J = H’*R_inv*H; |
| %--evaluate F(x) on GPU |
| F = H’*R_inv*(z-z_est); |
| %--compute dx on GPU |
| dx = (J / F); |
| %--get matrix from GPU |
| dx = gather(dx); |
4.2. Temperature Estimation Error Analysis Using Complete and Incomplete Sets of the Noise-Containing Measured Data
5. Conclusions
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| From Bus | To Bus | Line Length | Summer Case | Winter Case | Line Resistance | Line Reactance |
|---|---|---|---|---|---|---|
| km | (C) | (C) | C | C | ||
| 1 | 2 | 116.206 | 43.991 | −9.768 | 4.166 | 48.919 |
| 1 | 39 | 33.194 | 43.991 | −9.768 | 1.19 | 29.756 |
| 2 | 3 | 43.152 | 62.503 | −6.852 | 1.547 | 17.973 |
| 2 | 25 | 232.413 | 47.015 | −9.278 | 8.332 | 10.236 |
| 3 | 4 | 43.152 | 48.738 | −8.998 | 1.547 | 25.352 |
| 3 | 18 | 36.513 | 42.912 | −9.948 | 1.309 | 15.830 |
| 4 | 5 | 26.555 | 43.059 | −9.926 | 0.952 | 15.235 |
| 4 | 14 | 26.555 | 48.046 | −9.119 | 0.952 | 15.354 |
| 5 | 6 | 6.639 | 45.576 | −9.52 | 0.238 | 3.095 |
| 5 | 8 | 26.555 | 47.77 | −9.16 | 0.952 | 13.331 |
| 6 | 7 | 19.916 | 50.7 | −8.695 | 0.714 | 10.950 |
| 6 | 11 | 23.236 | 60.716 | −7.137 | 0.833 | 9.760 |
| 7 | 8 | 13.278 | 43.293 | −9.885 | 0.476 | 5.475 |
| 8 | 9 | 76.374 | 44.541 | −9.684 | 2.738 | 43.206 |
| 9 | 39 | 33.194 | 44.172 | −9.744 | 1.19 | 29.756 |
| 10 | 11 | 13.278 | 59.993 | −7.246 | 0.476 | 5.118 |
| 10 | 13 | 13.278 | 44.698 | −9.663 | 0.476 | 5.118 |
| 13 | 14 | 29.874 | 44.085 | −9.759 | 1.071 | 12.022 |
| 14 | 15 | 59.749 | 43.712 | −9.815 | 2.142 | 25.828 |
| 15 | 16 | 29.874 | 57.385 | −7.637 | 1.071 | 11.188 |
| 16 | 17 | 23.236 | 45.084 | −9.588 | 0.833 | 10.593 |
| 16 | 19 | 53.110 | 62.316 | −6.885 | 1.904 | 23.210 |
| 16 | 21 | 26.555 | 51.01 | −8.644 | 0.952 | 16.068 |
| 16 | 24 | 9.958 | 43.465 | −9.855 | 0.357 | 7.022 |
| 17 | 18 | 23.236 | 45.84 | −9.476 | 0.833 | 9.760 |
| 17 | 27 | 43.152 | 42.768 | −9.973 | 1.547 | 20.591 |
| 21 | 22 | 26.555 | 70.323 | −5.688 | 0.952 | 16.664 |
| 22 | 23 | 19.916 | 42.768 | −9.971 | 0.714 | 11.426 |
| 23 | 24 | 73.054 | 51.471 | −8.572 | 2.619 | 41.659 |
| 25 | 26 | 106.248 | 43.282 | −9.892 | 3.809 | 38.445 |
| 26 | 27 | 46.471 | 48.877 | −9.001 | 1.666 | 17.497 |
| 26 | 28 | 142.762 | 43.944 | −9.777 | 5.118 | 56.418 |
| 26 | 29 | 189.233 | 44.982 | −9.608 | 6.784 | 74.391 |
| 28 | 29 | 46.471 | 50.298 | −8.757 | 1.666 | 17.973 |
| From | To | Meas. | Est. | Meas. | Est. | Meas. | Est. | Meas. | Est. |
|---|---|---|---|---|---|---|---|---|---|
| Bus | Bus | p.u. | p.u. | p.u. | p.u. | p.u. | p.u. | p.u. | p.u. |
| 1 | 2 | −1.7623 | −1.7168 | 1.7733 | 1.7264 | −0.3657 | −0.3563 | −0.2658 | −0.2851 |
| 1 | 39 | 0.7863 | 0.7581 | −0.7855 | −0.7575 | −0.0763 | −0.0812 | −0.7082 | −0.7007 |
| 2 | 3 | 3.1477 | 3.1794 | −3.1325 | −3.1660 | 0.8935 | 0.8939 | −0.9937 | −1.0135 |
| 2 | 25 | −2.4210 | −2.4340 | 2.4687 | 2.4779 | 0.8656 | 0.8668 | −0.9688 | −0.9730 |
| 2 | 30 | −2.5000 | −2.5000 | 2.5000 | 2.5000 | −1.4932 | −1.4923 | 1.6400 | 1.6405 |
| 3 | 4 | 0.3562 | 0.3436 | −0.3540 | −0.3417 | 1.0830 | 1.0816 | −1.2751 | −1.2769 |
| 3 | 18 | −0.4437 | −0.4075 | 0.4439 | 0.4076 | −0.1133 | −0.1054 | −0.1098 | −0.1171 |
| 4 | 5 | −1.9747 | −2.0160 | 1.9782 | 2.0193 | −0.1024 | −0.1082 | 0.0228 | 0.0260 |
| 4 | 14 | −2.6712 | −2.6383 | 2.6777 | 2.6440 | −0.4625 | −0.4642 | 0.4282 | 0.4170 |
| 5 | 6 | −5.3730 | −5.3785 | 5.3794 | 5.3843 | −0.5029 | −0.5071 | 0.5424 | 0.5390 |
| 5 | 8 | 3.3948 | 3.3807 | −3.3844 | −3.3714 | 0.4801 | 0.4696 | −0.4800 | −0.4858 |
| 6 | 7 | 4.5132 | 4.5354 | −4.4990 | −4.5227 | 0.8362 | 0.8309 | −0.7321 | −0.7490 |
| 6 | 11 | −3.1658 | −3.2026 | 3.1739 | 3.2098 | −0.3715 | −0.3848 | 0.3262 | 0.3281 |
| 6 | 31 | −6.7268 | −6.7268 | 6.7268 | 6.7268 | −1.0071 | −1.0078 | 2.3198 | 2.3205 |
| 7 | 8 | 2.1610 | 2.1723 | −2.1590 | −2.1704 | −0.1079 | −0.1069 | 0.0549 | 0.0518 |
| 8 | 9 | 0.3233 | 0.3656 | −0.3196 | −0.3622 | −1.3408 | −1.3329 | 1.0064 | 0.9944 |
| 9 | 39 | 0.2546 | 0.2827 | −0.2545 | −0.2825 | −0.3404 | −0.3279 | −0.9390 | −0.9437 |
| 10 | 11 | 3.2164 | 3.2358 | −3.2115 | −3.2315 | 0.7360 | 0.7376 | −0.7578 | −0.7659 |
| 10 | 13 | 3.2836 | 3.2637 | −3.2788 | −3.2595 | 0.4746 | 0.4674 | −0.4989 | −0.4965 |
| 10 | 32 | −6.5000 | −6.4998 | 6.5000 | 6.4998 | −1.2106 | −1.2089 | 2.1814 | 2.1823 |
| 12 | 11 | −0.0373 | −0.0445 | 0.0376 | 0.0448 | −0.4235 | −0.4270 | 0.4315 | 0.4351 |
| 12 | 13 | −0.0480 | −0.0408 | 0.0484 | 0.0411 | −0.4565 | −0.4530 | 0.4658 | 0.4622 |
| 13 | 14 | 3.2305 | 3.1857 | −3.2204 | −3.1767 | 0.0331 | 0.0181 | −0.0957 | −0.0930 |
| 14 | 15 | 0.5427 | 0.5038 | −0.5421 | −0.5033 | −0.3325 | −0.3406 | −0.0328 | −0.0258 |
| 15 | 16 | −2.6579 | −2.6752 | 2.6671 | 2.6833 | −1.4972 | −1.5059 | 1.4154 | 1.4133 |
| 16 | 17 | 2.2627 | 2.2471 | −2.2589 | −2.2437 | −0.4464 | −0.4522 | 0.3529 | 0.3548 |
| 16 | 19 | −4.5075 | −4.5124 | 4.5437 | 4.5436 | −0.5257 | −0.5552 | 0.6387 | 0.6101 |
| 16 | 21 | −3.2138 | −3.2616 | 3.2227 | 3.2697 | 0.1921 | 0.1813 | −0.3116 | −0.3113 |
| 16 | 24 | −0.4986 | −0.4782 | 0.4989 | 0.4785 | −0.9583 | −0.9564 | 0.8927 | 0.8906 |
| 17 | 18 | 2.0269 | 2.0044 | −2.0239 | −2.0018 | 0.0857 | 0.0791 | −0.1902 | −0.1867 |
| 17 | 27 | 0.2319 | 0.2490 | −0.2318 | −0.2488 | −0.4386 | −0.4327 | 0.0977 | 0.0939 |
| 19 | 20 | 1.7473 | 1.7473 | −1.7452 | −1.7451 | −0.1076 | −0.1074 | 0.1507 | 0.1510 |
| 19 | 33 | −6.2910 | −6.2905 | 6.3200 | 6.3198 | −0.5312 | −0.5268 | 1.1194 | 1.1216 |
| 20 | 34 | −5.0548 | −5.0544 | 5.0800 | 5.0799 | −1.1807 | −1.1771 | 1.6838 | 1.6856 |
| 21 | 22 | −5.9627 | −6.0169 | 5.9955 | 6.0449 | −0.8384 | −0.8921 | 1.1366 | 1.1079 |
| 22 | 23 | 0.5045 | 0.4715 | −0.5042 | −0.4712 | 0.4259 | 0.4162 | −0.6230 | −0.6118 |
| 22 | 35 | −6.5000 | −6.4997 | 6.5000 | 6.4997 | −1.5626 | −1.5579 | 2.1725 | 2.1747 |
| 23 | 24 | 3.6148 | 3.4951 | −3.5849 | −3.4701 | 0.0564 | −0.0051 | 0.0293 | 0.0165 |
| 23 | 36 | −5.5856 | −5.5850 | 5.6000 | 5.5995 | −0.2794 | −0.2740 | 1.0604 | 1.0631 |
| 25 | 26 | 0.6747 | 0.6433 | −0.6732 | −0.6420 | −0.1637 | −0.1729 | −0.4119 | −0.3988 |
| 25 | 37 | −5.3834 | −5.3829 | 5.4000 | 5.3997 | 0.6605 | 0.6655 | −0.0197 | −0.0171 |
| 26 | 27 | 2.5887 | 2.5739 | −2.5782 | −2.5646 | 0.7017 | 0.6927 | −0.8527 | −0.8532 |
| 26 | 28 | −1.4001 | −1.4061 | 1.4087 | 1.4141 | −0.2137 | −0.2125 | −0.5525 | −0.5521 |
| 26 | 29 | −1.9054 | −1.8993 | 1.9266 | 1.9186 | −0.2460 | −0.2515 | −0.6567 | −0.6610 |
| 28 | 29 | −3.4687 | −3.4718 | 3.4861 | 3.4875 | 0.2765 | 0.2685 | −0.3629 | −0.3709 |
| 29 | 38 | −8.2476 | −8.2468 | 8.3000 | 8.2996 | 0.7506 | 0.7571 | 0.2704 | 0.2737 |
| Bus | Measured V | Estimated V | Bus | Measured V | Estimated V | Bus | Measured V | Estimated V |
|---|---|---|---|---|---|---|---|---|
| p.u. | p.u. | p.u. | p.u. | p.u. | p.u. | |||
| 1 | 1.0393 | 1.0354 | 14 | 1.0079 | 1.0073 | 27 | 1.0352 | 1.0317 |
| 2 | 1.0481 | 1.0428 | 15 | 1.0104 | 1.0098 | 28 | 1.0492 | 1.0442 |
| 3 | 1.0274 | 1.0248 | 16 | 1.0285 | 1.0256 | 29 | 1.0493 | 1.0442 |
| 4 | 0.9991 | 0.9995 | 17 | 1.0306 | 1.0276 | 30 | 1.0499 | 1.0448 |
| 5 | 1.0017 | 1.0020 | 18 | 1.0279 | 1.0252 | 31 | 0.9820 | 0.9820 |
| 6 | 1.0044 | 1.0044 | 19 | 1.0496 | 1.0437 | 32 | 0.9841 | 0.9828 |
| 7 | 0.9932 | 0.9944 | 20 | 0.9907 | 0.9852 | 33 | 0.9972 | 0.9918 |
| 8 | 0.9927 | 0.9939 | 21 | 1.0276 | 1.0249 | 34 | 1.0123 | 1.0069 |
| 9 | 1.0383 | 1.0350 | 22 | 1.0492 | 1.0432 | 35 | 1.0494 | 1.0436 |
| 10 | 1.0154 | 1.0140 | 23 | 1.0437 | 1.0381 | 36 | 1.0636 | 1.0582 |
| 11 | 1.0103 | 1.0095 | 24 | 1.0345 | 1.0311 | 37 | 1.0275 | 1.0214 |
| 12 | 0.9976 | 0.9966 | 25 | 1.0578 | 1.0516 | 38 | 1.0265 | 1.0216 |
| 13 | 1.0117 | 1.0107 | 26 | 1.0514 | 1.0461 | 39 | 1.0300 | 1.0271 |
| Bus | Measured | Estimated | Measured | Estimated |
|---|---|---|---|---|
| p.u. | p.u. | p.u. | p.u. | |
| 30 | 250.0000 | 249.9972 | 164.0020 | 164.0519 |
| 31 | 681.8818 | 681.8766 | 236.5753 | 236.6509 |
| 32 | 650.0000 | 649.9837 | 218.1425 | 218.2277 |
| 33 | 632.0000 | 631.9840 | 111.9433 | 112.1604 |
| 34 | 508.0000 | 507.9868 | 168.3800 | 168.5595 |
| 35 | 650.0000 | 649.9733 | 217.2478 | 217.4728 |
| 36 | 560.0000 | 559.9549 | 106.0431 | 106.3141 |
| 37 | 540.0000 | 539.9658 | −1.9722 | −1.7094 |
| 38 | 830.0000 | 829.9622 | 27.0394 | 27.3742 |
| 39 | 1000.0000 | 1000.0021 | 85.2824 | 85.5680 |
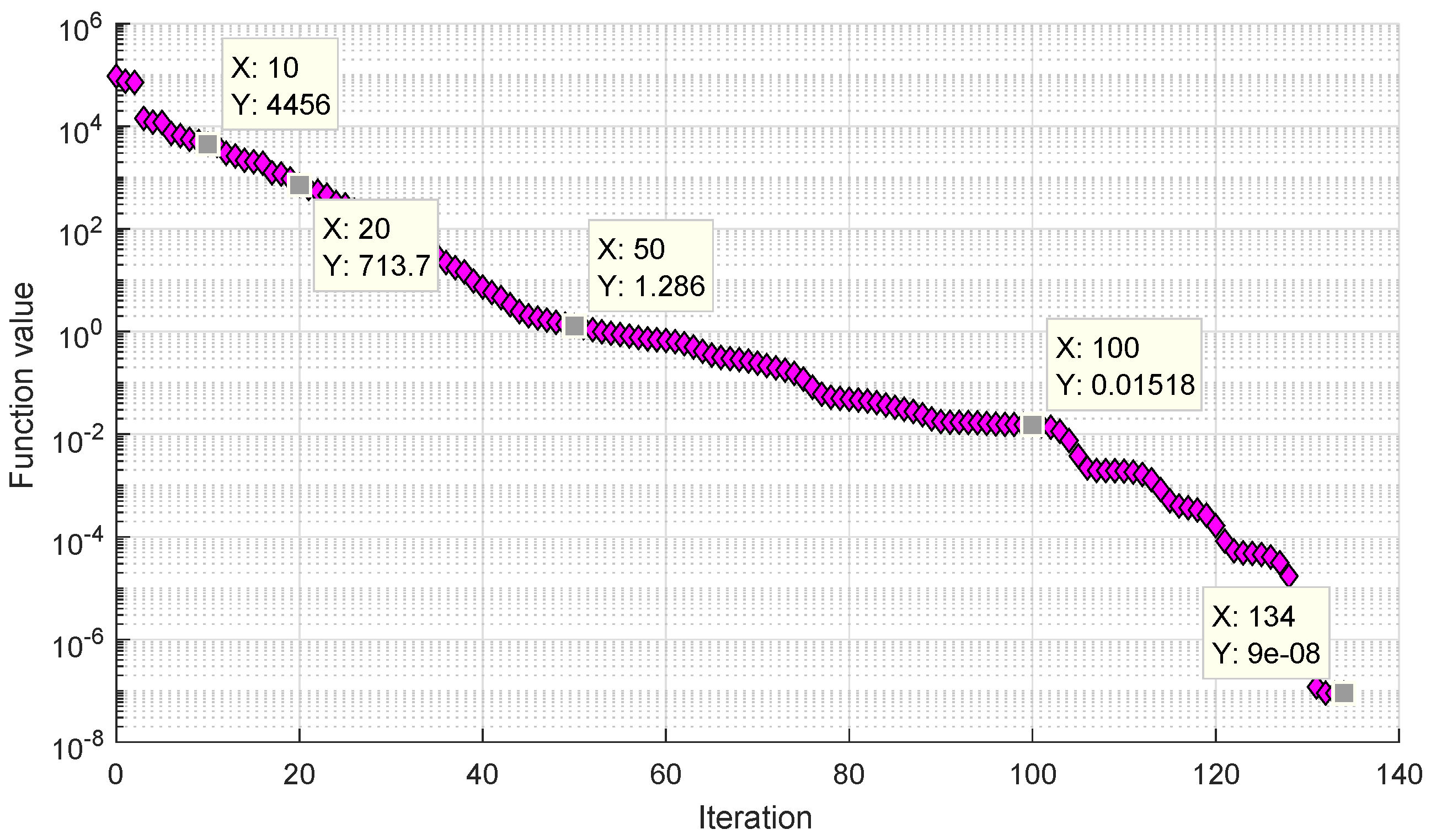
| F. Bus | T. Bus | Line Temp. | Iter. 1 Line Temp. | Iter. 10 Estimated Line Temp. | Iter. 20 Estimated Line Temp. | Iter. 50 Estimated Line Temp. | Iter. 100 Estimated Line Temp. | Iter. 134 Estimated Line Temp. |
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 43.991 | 20 | 14.625 | 33.445 | 43.051 | 44.022 | 43.9909 |
| 1 | 39 | 43.991 | 20 | 17.459 | 19.269 | 36.558 | 44.227 | 43.9905 |
| 2 | 3 | 62.503 | 20 | 32.562 | 45.176 | 61.917 | 62.487 | 62.5029 |
| 2 | 25 | 47.015 | 20 | 22.477 | 23.162 | 45.581 | 47.022 | 47.0149 |
| 3 | 4 | 48.738 | 20 | 20.384 | 27.938 | 48.730 | 48.868 | 48.7378 |
| 3 | 18 | 42.912 | 20 | 19.044 | 21.168 | 28.442 | 36.045 | 42.9134 |
| 4 | 5 | 43.059 | 20 | 21.794 | 25.524 | 43.339 | 43.070 | 43.0587 |
| 4 | 14 | 48.046 | 20 | 20.324 | 23.780 | 47.934 | 47.995 | 48.0457 |
| 5 | 6 | 45.576 | 20 | 22.403 | 27.878 | 44.888 | 45.554 | 45.5758 |
| 5 | 8 | 47.77 | 20 | 23.647 | 38.265 | 48.195 | 47.776 | 47.7697 |
| 6 | 7 | 50.7 | 20 | 25.736 | 40.611 | 50.876 | 50.700 | 50.6997 |
| 6 | 11 | 60.716 | 20 | 26.207 | 37.559 | 60.395 | 60.654 | 60.7157 |
| 7 | 8 | 43.293 | 20 | 20.211 | 24.453 | 43.211 | 43.285 | 43.2927 |
| 8 | 9 | 44.541 | 20 | 17.570 | 26.175 | 41.429 | 44.694 | 44.5408 |
| 9 | 39 | 44.172 | 20 | 21.439 | 20.205 | 19.412 | 44.900 | 44.1716 |
| 10 | 11 | 59.993 | 20 | 27.715 | 31.951 | 60.957 | 59.970 | 59.9927 |
| 10 | 13 | 44.698 | 20 | 13.863 | 17.236 | 45.640 | 44.677 | 44.6977 |
| 13 | 14 | 44.085 | 20 | 17.871 | 29.703 | 43.872 | 44.088 | 44.0847 |
| 14 | 15 | 43.712 | 20 | 18.441 | 21.827 | 43.472 | 45.327 | 43.7113 |
| 15 | 16 | 57.385 | 20 | 25.390 | 37.607 | 57.552 | 57.240 | 57.3850 |
| 16 | 17 | 45.084 | 20 | 17.350 | 21.965 | 46.028 | 45.291 | 45.0838 |
| 16 | 19 | 62.316 | 20 | 35.958 | 58.923 | 62.336 | 62.318 | 62.3160 |
| 16 | 21 | 51.01 | 20 | 23.561 | 55.300 | 50.920 | 51.015 | 51.0099 |
| 16 | 24 | 43.465 | 20 | 17.616 | 43.561 | 45.301 | 43.582 | 43.4644 |
| 17 | 18 | 45.84 | 20 | 16.529 | 21.828 | 50.047 | 46.451 | 45.8397 |
| 17 | 27 | 42.768 | 20 | 19.614 | 18.483 | 40.271 | 41.448 | 42.7681 |
| 21 | 22 | 70.323 | 20 | 53.461 | 71.710 | 70.344 | 70.326 | 70.3230 |
| 22 | 23 | 42.768 | 20 | 17.981 | 41.226 | 40.889 | 42.644 | 42.7686 |
| 23 | 24 | 51.471 | 20 | 31.756 | 53.886 | 51.502 | 51.478 | 51.4709 |
| 25 | 26 | 43.282 | 20 | 18.976 | 23.207 | 39.777 | 44.348 | 43.2816 |
| 26 | 27 | 48.877 | 20 | 17.963 | 32.390 | 49.235 | 48.930 | 48.8769 |
| 26 | 28 | 43.944 | 20 | 20.540 | 23.285 | 43.769 | 43.872 | 43.9438 |
| 26 | 29 | 44.982 | 20 | 20.608 | 29.907 | 44.914 | 44.931 | 44.9819 |
| 28 | 29 | 50.298 | 20 | 22.630 | 42.332 | 50.363 | 50.272 | 50.2980 |
| J | 94,693.7 | 4456.05 | 713.72 | 1.286 | 0.0152 |
References
- Kacejko, P.; Wydra, M. Wind Energy in Poland—Real Estimation of Generation Possibilities. Rynek Energii 2010, 6, 100–104. [Google Scholar]
- Kacejko, P.; Wydra, M. Wind Energy in Poland—Analysis of Potential Power System Balance Limitations and Influence on Conventional Power Units Operational Conditions. Rynek Energii 2011, 2, 25–30. [Google Scholar]
- IEEE. IEEE Approved Draft Standard for Calculating the Current-Temperature Relationship of Bare Overhead Conductors—Corrigendum 1; IEEE P738-2012-Cor-1 2013/D2, August 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–10. [Google Scholar]
- CIGRE Thermal Behaviour of Overhead Conductors—CIGRE Workig Group 22.12. ELECTRA-CIGRE 2002, 203, 70–73.
- Balangó, D.; Németh, B.; Göcsei, G. Predicting conductor sag of power lines in a new model of Dynamic Line Rating. In Proceedings of the 2015 IEEE Electrical Insulation Conference (EIC), Seattle, WA, USA, 7–10 June 2015; pp. 41–44. [Google Scholar]
- Bhattarai, B.P.; Gentle, J.P.; McJunkin, T.; Hill, P.J.; Myers, K.; Abboud, A.; Renwick, R.; Hengst, D. Improvement of Transmission Line Ampacity Utilization by Weather-Based Dynamic Line Ratings. IEEE Trans. Power Deliv. 2018. [Google Scholar] [CrossRef]
- Viola, T.; Németh, B.; Göcsei, G. Applicability of DLR sensors in high voltage systems. In Proceedings of the 2017 6th International Youth Conference on Energy (IYCE), Budapest, Hungary, 21–24 June 2017; pp. 1–6. [Google Scholar]
- Moldoveanu, C.; Rusu, A.; Florea, M.; Vaju, M.; Hategan, I.; Iacobici, L.; Balta, N.; Zaharescu, S.; Avramescu, M.; Curiac, P.; et al. Integrated solution for real-time monitoring of overhead transmission lines. In Proceedings of the 2016 IEEE PES 13th International Conference on Transmission Distribution Construction, Operation Live-Line Maintenance (ESMO), Columbus, OH, USA, 12–15 September 2016; pp. 1–5. [Google Scholar]
- Bernini, R.; Minardo, A.; Persiano, G.V.; Vaccaro, A.; Villacci, D.; Zeni, L. Dynamic loading of overhead lines by adaptive learning techniques and distributed temperature sensing. IET Gener. Trans. Distrib. 2007, 1, 912–919. [Google Scholar] [CrossRef]
- Black, C.R.; Chisholm, W.A. Key Considerations for the Selection of Dynamic Thermal Line Rating Systems. IEEE Trans. Power Deliv. 2015, 30, 2154–2162. [Google Scholar] [CrossRef]
- Douglass, D.; Chisholm, W.; Davidson, G.; Grant, I.; Lindsey, K.; Lancaster, M.; Lawry, D.; McCarthy, T.; Nascimento, C.; Pasha, M.; et al. Real-Time Overhead Transmission-Line Monitoring for Dynamic Rating. IEEE Trans. Power Deliv. 2016, 31, 921–927. [Google Scholar] [CrossRef]
- Kim, S.D.; Morcos, M.M. An Application of Dynamic Thermal Line Rating Control System to Up-Rate the Ampacity of Overhead Transmission Lines. IEEE Trans. Power Deliv. 2013, 28, 1231–1232. [Google Scholar] [CrossRef]
- Wydra, M.; Kisala, P.; Harasim, D.; Kacejko, P. Overhead Transmission Line Sag Estimation Using a Simple Optomechanical System with Chirped Fiber Bragg Gratings. Part 1: Preliminary Measurements. Sensors 2018, 18, 309. [Google Scholar] [CrossRef] [PubMed]
- Mazur, K.; Wydra, M.; Ksiezopolski, B. Secure and Time-Aware Communication of Wireless Sensors Monitoring Overhead Transmission Lines. Sensors 2017, 17, 610. [Google Scholar] [CrossRef] [PubMed]
- Shan, X.Y.; Pike, A.W.; Roberts, P.D.; Lin, J. Implementation and application of ISOPE algorithms. In Proceedings of the International Conference on Control, Coventry, UK, 21–24 March 1994; Volume 1, pp. 460–465. [Google Scholar]
- Bockarjova, M.; Andersson, G. Transmission Line Conductor Temperature Impact on State Estimation Accuracy. In Proceedings of the 2007 IEEE Lausanne Power Tech, Lausanne, Switzerland, 1–5 July 2007; pp. 701–706. [Google Scholar]
- Rakpenthai, C.; Uatrongjit, S. Power System State and Transmission Line Conductor Temperature Estimation. IEEE Trans. Power Syst. 2017, 32, 1818–1827. [Google Scholar] [CrossRef]
- Abur, A.; Expósito, A.G. Power System State Estimation, Theory and Implementation, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2004; p. 157. [Google Scholar]
- Grigsby, L. The Electric Power Engineering Handbook: Power Systems, Third Edition—Five Volume Set; CRC Press: Boca Raton, FL, USA, 2013; pp. 5–25. [Google Scholar]
- Kremens, Z.; Sobierajski, M. Power System Analysis; WNT: Warsaw, Poland, 1996. [Google Scholar]
- Majidi, M.; Etezadi-Amoli, M.; Livani, H. Distribution system state estimation using compressive sensing. Int. J. Electr. Power Energy Syst. 2017, 88, 175–186. [Google Scholar] [CrossRef]
- Jin, T.; Shen, X. A Mixed WLS Power System State Estimation Method Integrating a Wide-Area Measurement System and SCADA Technology. Energies 2018, 11, 408. [Google Scholar] [CrossRef]
- Göl, M.; Abur, A. LAV Based Robust State Estimation for Systems Measured by PMUs. IEEE Trans. Smart Grid 2014, 5, 1808–1814. [Google Scholar] [CrossRef]
- Abur, A.; Lin, Y. Robust State Estimation Against Measurement and Network Parameter Errors. IEEE Trans. Power Syst. 2018. [Google Scholar] [CrossRef]
- D’Antona, G. Power System Static-State Estimation With Uncertain Network Parameters as Input Data. IEEE Trans. Instrum. Meas. 2016, 65, 2485–2494. [Google Scholar] [CrossRef]
- D’Antona, G.; Perfetto, L. Bad data detection and identification in power system state estimation with network parameters uncertainty. In Proceedings of the 2015 2nd International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, Iran, 5–6 November 2015; pp. 26–31. [Google Scholar]
- Bil, T.; Chen, J.; Wu, J.; Yang, Q. Synchronized phasor based on-line parameter identification of overhead transmission line. In Proceedings of the 2008 Third International Conference on Electric Utility Deregulation and Restructuring and Power Technologies, Nanjing, China, 6–9 April 2008; pp. 1657–1662. [Google Scholar]
- Cecchi, V.; Knudson, M.; Miu, K. System Impacts of Temperature-Dependent Transmission Line Models. IEEE Trans. Power Deliv. 2013, 28, 2300–2308. [Google Scholar] [CrossRef]
- Rahman, M.; Kiesau, M.; Cecchi, V.; Watkins, B. Investigating the impacts of conductor temperature on power handling capabilities of transmission lines using a multi-segment line model. In Proceedings of the 2017 SoutheastCon, Charlotte, NC, USA, 30 March–2 April 2017; pp. 1–7. [Google Scholar]
- Cecchi, V.; Leger, A.S.; Miu, K.; Nwankpa, C.O. Incorporating Temperature Variations Into Transmission-Line Models. IEEE Trans. Power Deliv. 2011, 26, 2189–2196. [Google Scholar] [CrossRef]
- Exposito, A.G.; Santos, J.R.; Romero, P.C. Planning and Operational Issues Arising From the Widespread Use of HTLS Conductors. IEEE Trans. Power Syst. 2007, 22, 1446–1455. [Google Scholar] [CrossRef]
- Kubis, A.; Rehtanz, C. Application of a combined electro-thermal overhead line model in power flow and time-domain power system simulations. IET Gener. Trans. Distrib. 2017, 11, 2041–2049. [Google Scholar] [CrossRef]
- Zimmerman, R.D.; Murillo-Sanchez, C.E.; Thomas, R.J. MATPOWER: Steady-State Operations, Planning, and Analysis Tools for Power Systems Research and Education. IEEE Trans. Power Syst. 2011, 26, 12–19. [Google Scholar] [CrossRef]
- Schweppe, F.C.; Wildes, J. Power System Static-State Estimation, Part I: Exact Model. IEEE Trans. Power Appar. Syst. 1970, PAS-89, 120–125. [Google Scholar] [CrossRef]
- Schweppe, F.C.; Rom, D.B. Power System Static-State Estimation, Part II: Approximate Model. IEEE Trans. Power Appar. Syst. 1970, PAS-89, 125–130. [Google Scholar] [CrossRef]
- Schweppe, F.C. Power System Static-State Estimation, Part III: Implementation. IEEE Trans. Power Appar. Syst. 1970, PAS-89, 130–135. [Google Scholar] [CrossRef]
- Crow, M.L. Computational Methods for Electric Power Systems; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Morgan, V.T. Effects of alternating and direct current, power frequency, temperature, and tension on the electrical parameters of ACSR conductors. IEEE Trans. Power Deliv. 2003, 18, 859–866. [Google Scholar] [CrossRef]
- Morgan, V.T. The Current Distribution, Resistance and Internal Inductance of Linear Power System Conductors 2014, A Review of Explicit Equations. IEEE Trans. Power Deliv. 2013, 28, 1252–1262. [Google Scholar] [CrossRef]
- Ramachandran, P.; Vittal, V.; Heydt, G.T. Mechanical State Estimation for Overhead Transmission Lines with Level Spans. IEEE Trans. Power Syst. 2008, 23, 908–915. [Google Scholar] [CrossRef]
- Wydra, M.; Kacejko, P. Power system state estimation using wire temperature measurements for model accuracy enhancement. In Proceedings of the 2016 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Ljubljana, Slovenia, 9–12 October 2016; pp. 1–6. [Google Scholar]
- Ramachandran, P.; Vittal, V. On-Line Monitoring of Sag in Overhead Transmission Lines with Leveled Spans. In Proceedings of the 2006 38th North American Power Symposium, Carbondale, IL, USA, 17–19 September 2006; pp. 405–409. [Google Scholar]
- Malhara, S.; Vittal, V. Mechanical State Estimation of Overhead Transmission Lines Using Tilt Sensors. IEEE Trans. Power Syst. 2010, 25, 1282–1290. [Google Scholar] [CrossRef]
- Wood, A.J.; Wollenberg, B.F. Power Generation, Operation and Control; John Wiley and Sons: Hoboken, NJ, USA, 2016; p. 403. [Google Scholar]
- De Nazare, F.V.B.; Werneck, M.M. Hybrid Optoelectronic Sensor for Current and Temperature Monitoring in Overhead Transmission Lines. IEEE Sensors J. 2012, 12, 1193–1194. [Google Scholar] [CrossRef]



| IEEE Test Case | Number of Branches | Mean Single Estimation Time (s) | Line Temperatures Estimation Time (s) | Mean Single Estimation Time (s) Graphical Processing Unit (GPU) Supported | Line Temperatures Estimation Time (s) Graphical Processing Unit (GPU) Supported |
|---|---|---|---|---|---|
| 9 | 9 | 0.050 | 3.19 | 0.0087 | 3.35 |
| 14 | 20 | 0.051 | 13.89 | 0.0115 | 15.09 |
| 30 | 41 | 0.031 | 43.46 | 0.0172 | 47.28 |
| 39 | 46 | 0.095 | 45.82 | 0.0269 | 36.27 |
| 57 | 80 | 0.056 | 201.04 | 0.0757 | 223.69 |
| 118 | 186 | 0.186 | 7308 | 0.6721 | 3684 |
| 300 | 411 | 4.231 | 165,680 | 2.6332 | 72,028 |
| Instrument Transformer Classes | Maximal Mean Relative Error |
|---|---|
| 0.1 | 0.69% |
| 0.2 | 0.42% |
| 0.5 | 1.05% |
| Class | Sampling | Sampling | Sampling | Sampling |
|---|---|---|---|---|
| = 30 s | = 10 s | = 5 s | = 2 s | |
| 0.1 | 14.97% | 6.64% | 4.30% | 2.11% |
| 0.2 | 28.45% | 8.82% | 8.11% | 4.34% |
| 0.5 | 52.54% | 21.81% | 20.72% | 10.20% |
| Class | Sampling | Sampling | Sampling | Sampling |
|---|---|---|---|---|
| = 30 s | = 10 s | = 5 s | = 2 s | |
| 0.1 | 4.32% | 2.02% | 1.14% | 0.53% |
| 0.2 | 8.29% | 4.25% | 2.86% | 2.44% |
| 0.5 | 20.73% | 10.15% | 5.41% | 2.55% |
| Class | Sampling | Sampling | Sampling | Sampling |
|---|---|---|---|---|
| = 30 s | = 10 s | = 5 s | = 2 s | |
| 0.1 | 53.45% | 26.25% | 19.27% | 12.85% |
| 0.2 | 106.47% | 52.70% | 38.92% | 12.85% |
| 0.5 | 198.69% | 74.59% | 65.47% | 19.68% |
| Class | Sampling | Sampling | Sampling | Sampling |
|---|---|---|---|---|
| = 30 s | = 10 s | = 5 s | = 2 s | |
| 0.1 | 15.91% | 11.54% | 9.48% | 3.21% |
| 0.2 | 31.84% | 17.67% | 10.74% | 3.31% |
| 0.5 | 60.12% | 30.92% | 16.32% | 4.92% |
| Line Design Temperature | Method Limiting Relative Error (Class 0.1–0.5) | Estimated Temperature Maximal Error |
|---|---|---|
| 40 | 12.85–19.68% | 5.14–7.87 C |
| 60 | 7.71–11.80 C | |
| 80 | 10.28–15.74 C |
| Line Design Temperature | Method Limiting Relative Error (Class 0.1–0.5) | Estimated Temperature Maximal Error |
|---|---|---|
| 40 | 3.21–4.92% | 1.28–1.97 C |
| 60 | 1.93–2.95 C | |
| 80 | 2.57–3.94 C |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wydra, M. Performance and Accuracy Investigation of the Two-Step Algorithm for Power System State and Line Temperature Estimation. Energies 2018, 11, 1005. https://doi.org/10.3390/en11041005
Wydra M. Performance and Accuracy Investigation of the Two-Step Algorithm for Power System State and Line Temperature Estimation. Energies. 2018; 11(4):1005. https://doi.org/10.3390/en11041005
Chicago/Turabian StyleWydra, Michal. 2018. "Performance and Accuracy Investigation of the Two-Step Algorithm for Power System State and Line Temperature Estimation" Energies 11, no. 4: 1005. https://doi.org/10.3390/en11041005
APA StyleWydra, M. (2018). Performance and Accuracy Investigation of the Two-Step Algorithm for Power System State and Line Temperature Estimation. Energies, 11(4), 1005. https://doi.org/10.3390/en11041005