Direct-Lyapunov-Based Control Scheme for Voltage Regulation in a Three-Phase Islanded Microgrid with Renewable Energy Sources

 , and
, and 
Abstract
1. Introduction
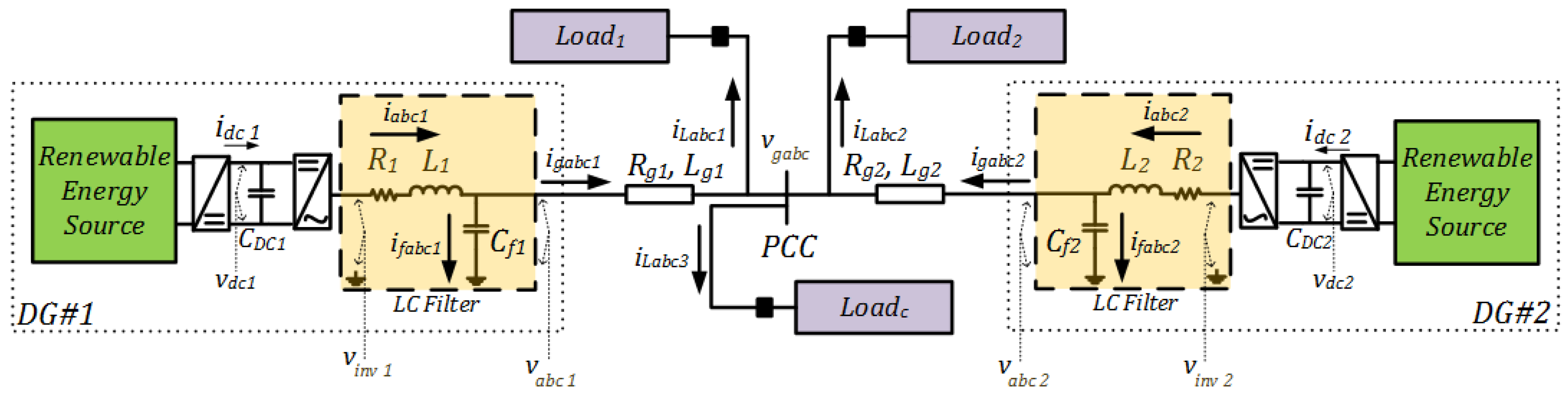
2. Microgrid Model and Analysis
2.1. Dynamic Model of the Microgrid
2.2. Steady-State Capability Curve
- (1)
- Variations of DG interface parameter () (due to ambient temperature, practical operation mismatches and so on);
- (2)
- AC-side reference voltage () variations (generated by droop control level and intermittent generation of renewable energy sources).
2.3. Dynamic-State Capability Curve
- (1)
- Variations of DG interface parameters ( and ) (due to ambient temperature, practical operation mismatches and so on);
- (2)
- The amount of dynamic changes of DG variables (, , ) due to changes occurred in loads and generation;
- (3)
- AC-side voltage () variations.
3. Control System
3.1. Inner Control Loops Based on the Direct Lyapunov Method
3.2. Primary Control Level
- (1)
- Applying current-based droop equations using fundamental harmonic components and previously calculated limits for each DG unit;
- (2)
- Harmonics separation of input voltages and currents and then re-adding the separated voltage harmonic parts to the generated reference signal.
3.3. Voltage Intermittency of DC-Side
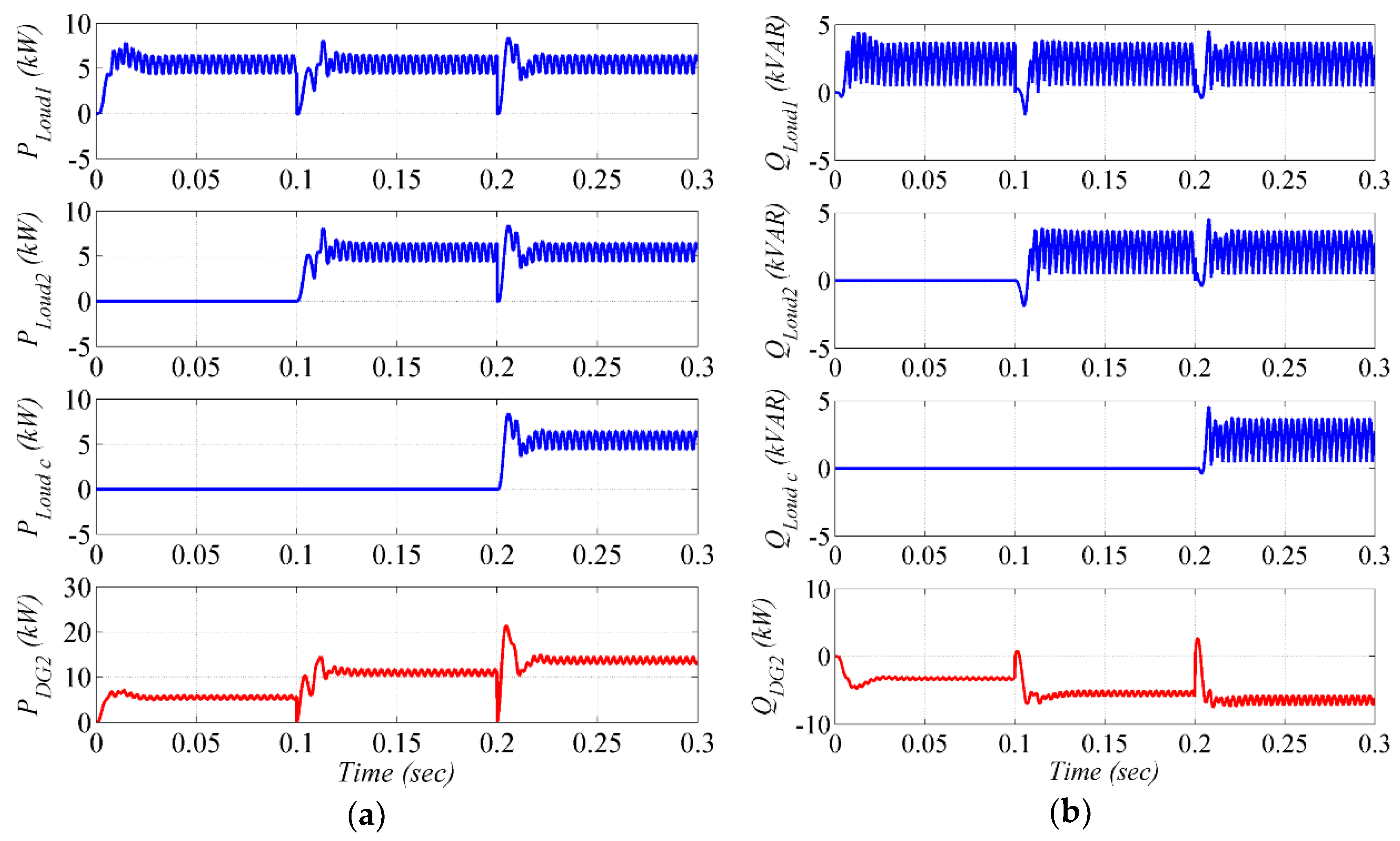
4. Simulation Results and Discussion
- Steady state operation: Both DG units are supplying local nonlinear loads.
- Local load change: At t = 0.1 s, an additional local nonlinear load is suddenly connected to each DG.
- DC-voltage change: In order to show the effectiveness of the complementary DC-voltage regulation loop, an additional scenario is also considered with a sudden DC-voltage decrease down to 50% of the normal voltage at t = 0.3 s and then a recovery to normal condition at t = 0.5 s. The change takes place after the connection of load#1 at t = 0.1 s.
4.1. Voltage Regulation at Point of Common Coupling
4.2. Voltage Harmonics at Point of Common Coupling
4.3. Assessment of Power Sharing
4.4. DC-Voltage Variations
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Nomenclature
| Subscripts | |
| i | DG unit numbers (for the typical test system, it takes the values “1” or “2”) |
| k | the phases (a, b or c) |
| d | Direct component of the variable |
| q | Quadrature component of the variable |
| 1 | Fundamental harmonic component |
| Superscripts | |
| * | Steady state variables |
| ~ | Dynamic state variable ( = dx/dt) |
| Variables | |
| iki | Currents of inverter on the AC side |
| uki | Equivalent switching function |
| vdci | Voltage of inverter in the DC side |
| vki | Voltages in the output of AC filter |
| ifki | Currents of capacitors on the AC side |
| igki | Injected current from DG unit to the grid |
| vgki | Voltages at point of common coupling (PCC) |
| idci | Currents of capacitor on the DC side |
| idqi | dq components of iki |
| ω | Angular frequency (Rad/s) |
| fi | Voltage frequency of droop output (Hz) |
| vi | Voltage magnitude of droop output (v) |
| vdqi | dq components of vki |
| vgdqi | dq components of vgki |
| udqi | dq components of uki |
| ifdqi | dq components of ifki |
| igdqi | dq components of igki |
| Pi | Output active power of DG unit |
| Qi | Output reactive power of DG unit |
| Parameters | |
| Li | Inductance of AC side filter |
| Ri | Resistance of AC side filter |
| Cfi | Capacitance of AC side filter |
| Cdci | Capacitance of DC side |
| Lgi | Inductance of AC side distribution microgrid |
| Rgi | Resistance of AC side distribution microgrid |
| RlbDGi | Resistance of base local load for each DG unit |
| LlbDGi | Inductance of base local load for each DG unit |
| RlDGi | Resistance of intermittent local load for DG#i |
| LlDGi | Inductance of intermittent local load for DG#i |
| Rlc | Resistance of intermittent common load DG#i |
| Llc | Inductance of intermittent common load DG#i |
| αi, βi, α’i, β’i | Droop coefficients |
| mdi, mqi | Lyapunov controller coefficients |
| Acronyms | |
| PCC | Point of Common Coupling |
| DLST | Direct Lyapunov Stability Theory |
| DG | Distributed Generation |
| MG | Microgrid |
| HC | Hierarchical Control |
| DC | Direct Current |
| AC | Alternative Current |
| CSCC | Current-based Steady-state Capability Curve |
| CDCC | Current-based Dynamic Capability Curve |
| LPF | Low Pass Filter |
References
- Akorede, M.F.; Hizam, H.; Pouresmaeil, E. Distributed energy resources and benefits to the environment. Renew. Sustain. Energy Rev. 2010, 14, 724–734. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Jørgensen, B.N.; Catalão, J.P.S.S. A control plan for the stable operation of microgrids during grid-connected and islanded modes. Electr. Power Syst. Res. 2015, 129, 10–22. [Google Scholar] [CrossRef]
- IEC 62264-1: Enterprise-Control System Integration—Part 1: Models and Terminology; IEC 62264-1 Standard; International Electrotechnical Commission: Geneva, Switzerland, 2013.
- IEC 62264-2: Enterprise-Control System Integration—Part 2: Objects and Attributes for Enterprise-Control System Integration; IEC 62264-2 Standard; International Electrotechnical Commission: Geneva, Switzerland, 2015.
- Milczarek, A.; Malinowski, M.; Guerrero, J.M. Reactive Power Management in Islanded Microgrid—Proportional Power Sharing in Hierarchical Droop Control. IEEE Trans. Smart Grid 2015, 6, 1631–1638. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; Garcia De Vicuna, L.; Castilla, M. Hierarchical Control of Droop-Controlled AC and DC Microgrids; A General Approach Toward Standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Planas, E.; Gil-de-Muro, A.; Andreu, J.; Kortabarria, I.; de Alegría, I.M. General aspects, hierarchical controls and droop methods in microgrids: A review. Renew. Sustain. Energy Rev. 2013, 17, 147–159. [Google Scholar] [CrossRef]
- Mohamed, Y.A.R.I.; El-Saadany, E.F. Adaptive Decentralized Droop Controller to Preserve Power Sharing Stability of Paralleled Inverters in Distributed Generation Microgrids. IEEE Trans. Power Electron. 2008, 23, 2806–2816. [Google Scholar] [CrossRef]
- Elrayyah, A.; Cingoz, F.; Sozer, Y. Construction of Nonlinear Droop Relations to Optimize Islanded Microgrid Operation. IEEE Trans. Ind. Appl. 2015, 51, 3404–3413. [Google Scholar] [CrossRef]
- Hua, H.; Yao, L.; Yao, S.; Mei, S.; Guerrero, J.M. An Improved Droop Control Strategy for Reactive Power Sharing in Islanded Microgrid. IEEE Trans. Power Electron. 2015, 30, 3133–3141. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A. Hierarchical Structure of Microgrids Control System. IEEE Trans. Smart Grid 2012, 3, 1963–1976. [Google Scholar] [CrossRef]
- Guerrero, J.M.; De Vicuna, L.G.; Matas, J.; Castilla, M.; Miret, J. A wireless controller to enhance dynamic performance of parallel inverters in distributed generation systems. IEEE Trans. Power Electron. 2004, 19, 1205–1213. [Google Scholar] [CrossRef]
- De Brabandere, K.; Bolsens, B.; Van den Keybus, J.; Woyte, A.; Driesen, J.; Belmans, R. A Voltage and Frequency Droop Control Method for Parallel Inverters. IEEE Trans. Power Electron. 2007, 22, 1107–1115. [Google Scholar] [CrossRef]
- Bevrani, H.; Shokoohi, S. An Intelligent Droop Control for Simultaneous Voltage and Frequency Regulation in Islanded Microgrids. IEEE Trans. Smart Grid 2013, 4, 1505–1513. [Google Scholar] [CrossRef]
- Sefa, I.; Altin, N.; Ozdemir, S.; Kaplan, O. Fuzzy PI controlled inverter for grid interactive renewable energy systems. IET Renew. Power Gener. 2015, 9, 729–738. [Google Scholar] [CrossRef]
- Logenthiran, T.L.; Naayagi, R.T.; Woo, W.L.; Phan, V.-T.; Abidi, K. Intelligent Control System for Microgrids Using Multi-Agent System. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 1036–1045. [Google Scholar] [CrossRef]
- Baghaee, H.R.; Mirsalim, M.; Gharehpetian, G.B. Performance Improvement of Multi-DER Microgrid for Small- and Large-Signal Disturbances and Nonlinear Loads: Novel Complementary Control Loop and Fuzzy Controller in a Hierarchical Droop-Based Control Scheme. IEEE Syst. J. 2016, 12, 444–451. [Google Scholar] [CrossRef]
- Yin, X.; Lin, Y.; Li, W.; Gu, Y.; Liu, H.; Lei, P. A novel fuzzy integral sliding mode current control strategy for maximizing wind power extraction and eliminating voltage harmonics. Energy 2015, 85, 677–686. [Google Scholar] [CrossRef]
- Xin, H.; Zhao, R.; Zhang, L.; Wang, Z.; Wong, K.P.; Wei, W. A Decentralized Hierarchical Control Structure and Self-Optimizing Control Strategy for F-P Type DGs in Islanded Microgrids. IEEE Trans. Smart Grid 2016, 7, 3–5. [Google Scholar] [CrossRef]
- Labella, A.; Mestriner, D.; Procopio, R.; Brignone, M. A new method to evaluate the stability of a droop controlled micro grid. In Proceedings of the 2017 10th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 23–15 March 2017; pp. 448–453. [Google Scholar]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodriguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, J.W. An Accurate Small-Signal Model of Inverter- Dominated Islanded Microgrids Using dq Reference Frame. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1070–1080. [Google Scholar] [CrossRef]
- Pouresmaeil, E.; Mehrasa, M.; Catalao, J.P.S. A Multifunction Control Strategy for the Stable Operation of DG Units in Smart Grids. IEEE Trans. Smart Grid 2015, 6, 598–607. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Catalao, J.P.S. Direct Lyapunov Control Technique for the Stable Operation of Multilevel Converter-Based Distributed Generation in Power Grid. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 931–941. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Akorede, M.F.; Jørgensen, B.N.; Catalão, J.P.S. Multilevel converter control approach of active power filter for harmonics elimination in electric grids. Energy 2015, 84, 722–731. [Google Scholar] [CrossRef]
- Hoseini, S.K.; Pouresmaeil, E.; Hosseinnia, S.H.; Catalão, J.P.S. A control approach for the operation of DG units under variations of interfacing impedance in grid-connected mode. Int. J. Electr. Power Energy Syst. 2016, 74, 1–8. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Zabihi, S.; Catalão, J.P.S. Dynamic model, control and stability analysis of mmc in HVDC transmission systems. IEEE Trans. Power Deliv. 2017, 32, 1471–1482. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Zabihi, S.; Rodrigues, E.M.G.; Catalão, J.P.S. A control strategy for the stable operation of shunt active power filters in power grids. Energy 2016, 96, 325–334. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Mehrjerdi, H.; Jørgensen, B.N.; Catalão, J.P.S. Control technique for enhancing the stable operation of distributed generation units within a microgrid. Energy Convers. Manag. 2015, 97, 362–373. [Google Scholar] [CrossRef]
- Yazdani, A.; Iravani, R. Voltage-Sourced Converters in Power Systems: Modeling, Control, and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2010; ISBN 0470551569. [Google Scholar]
- Mahmud, M.A.; Hossain, M.J.; Pota, H.R.; Oo, A.M.T. Robust Nonlinear Distributed Controller Design for Active and Reactive Power Sharing in Islanded Microgrids. IEEE Trans. Energy Convers. 2014, 29, 893–903. [Google Scholar] [CrossRef]
- Dasgupta, S.; Mohan, S.N.; Sahoo, S.K.; Panda, S.K. Lyapunov Function-Based Current Controller to Control Active and Reactive Power Flow From a Renewable Energy Source to a Generalized Three-Phase Microgrid System. IEEE Trans. Ind. Electron. 2013, 60, 799–813. [Google Scholar] [CrossRef]
- IEC 61000-2-2: Electromagnetic Compatibility (EMC)—Part 2-2: Environment—Compatibility Levels for Low-Frequency Conducted Disturbances and Signalling in Public Low-Voltage Power Supply Systems; IEC 61000-2-2; International Electrotechnical Commission: Geneva, Switzerland, 2002.
- Pouresmaeil, E.; Miguel-Espinar, C.; Massot-Campos, M.; Montesinos-Miracle, D.; Gomis-Bellmunt, O. A Control Technique for Integration of DG Units to the Electrical Networks. IEEE Trans. Ind. Electron. 2013, 60, 2881–2893. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage (V) | 380 | Load#1: RL1 (Ω) | 40 |
| Frequency (Hz) | 50 | Load#1: LL1 (mH) | 10 |
| Switching Freq. (kHz) | 10 | Load#2: RL2 (Ω) | 40 |
| DC-side voltage (V) | 900 | Load#2: LL2 (mH) | 10 |
| Ri (Ω) | 0.1 | Load#3: RL3 (Ω) | 40 |
| Li (mH) | 45 | Load#3: LL3 (mH) | 10 |
| Cfi (μF) | 200 | DG rated active power (kW) | 15 |
| Cdci (μF) | 2200 | DG rated reactive power (kVAr) | 10 |
| Lyapunov Coefficient: mdi | 10−3 | Lyapunov Coefficient: mqi | 10−4 |
| Line#1: Rg1 (Ω) | 0.02 | Line#2: Rg2 (Ω) | 0.02 |
| Line#1: Lg1 (mH) | 0.024 | Line#2: Lg2 (mH) | 0.024 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kordkheili, H.H.; Banejad, M.; Kalat, A.A.; Pouresmaeil, E.; Catalão, J.P.S. Direct-Lyapunov-Based Control Scheme for Voltage Regulation in a Three-Phase Islanded Microgrid with Renewable Energy Sources. Energies 2018, 11, 1161. https://doi.org/10.3390/en11051161
Kordkheili HH, Banejad M, Kalat AA, Pouresmaeil E, Catalão JPS. Direct-Lyapunov-Based Control Scheme for Voltage Regulation in a Three-Phase Islanded Microgrid with Renewable Energy Sources. Energies. 2018; 11(5):1161. https://doi.org/10.3390/en11051161
Chicago/Turabian StyleKordkheili, Hadi Hosseini, Mahdi Banejad, Ali Akbarzadeh Kalat, Edris Pouresmaeil, and João P. S. Catalão. 2018. "Direct-Lyapunov-Based Control Scheme for Voltage Regulation in a Three-Phase Islanded Microgrid with Renewable Energy Sources" Energies 11, no. 5: 1161. https://doi.org/10.3390/en11051161
APA StyleKordkheili, H. H., Banejad, M., Kalat, A. A., Pouresmaeil, E., & Catalão, J. P. S. (2018). Direct-Lyapunov-Based Control Scheme for Voltage Regulation in a Three-Phase Islanded Microgrid with Renewable Energy Sources. Energies, 11(5), 1161. https://doi.org/10.3390/en11051161