Service Continuity of PV Synchronous Buck/Buck-Boost Converter with Energy Storage†




Abstract
:1. Introduction
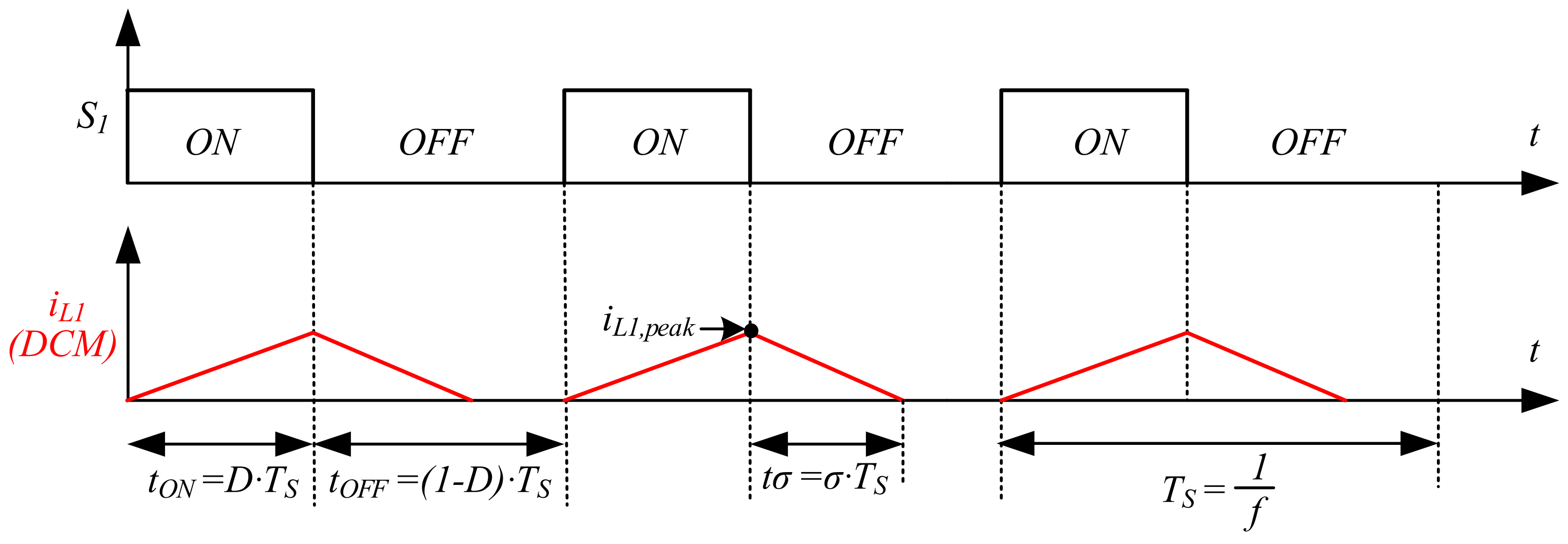
- Fault diagnosis, including fault detection and location. It is the first mandatory step for a suitable response to a fault detected in a semiconductor device. Several methods have been reported in the literature. An open and short circuit switch fault diagnosis applied to non-isolated DC-DC converters is presented in [6]. It is based on the continuous monitoring of the inductor current slope, whose abrupt changes give useful information for fault detection. In [7], fault diagnosis based on the monitoring of the primary voltage of a transformer is proposed and applied to full-bridge DC-DC converters. A DC-DC converter diagnosis method that utilizes the magnetic near field as the diagnostic criterion is proposed in [8]. In addition, a switch fault diagnosis method based on the magnetic component voltage measurement is proposed in [9].
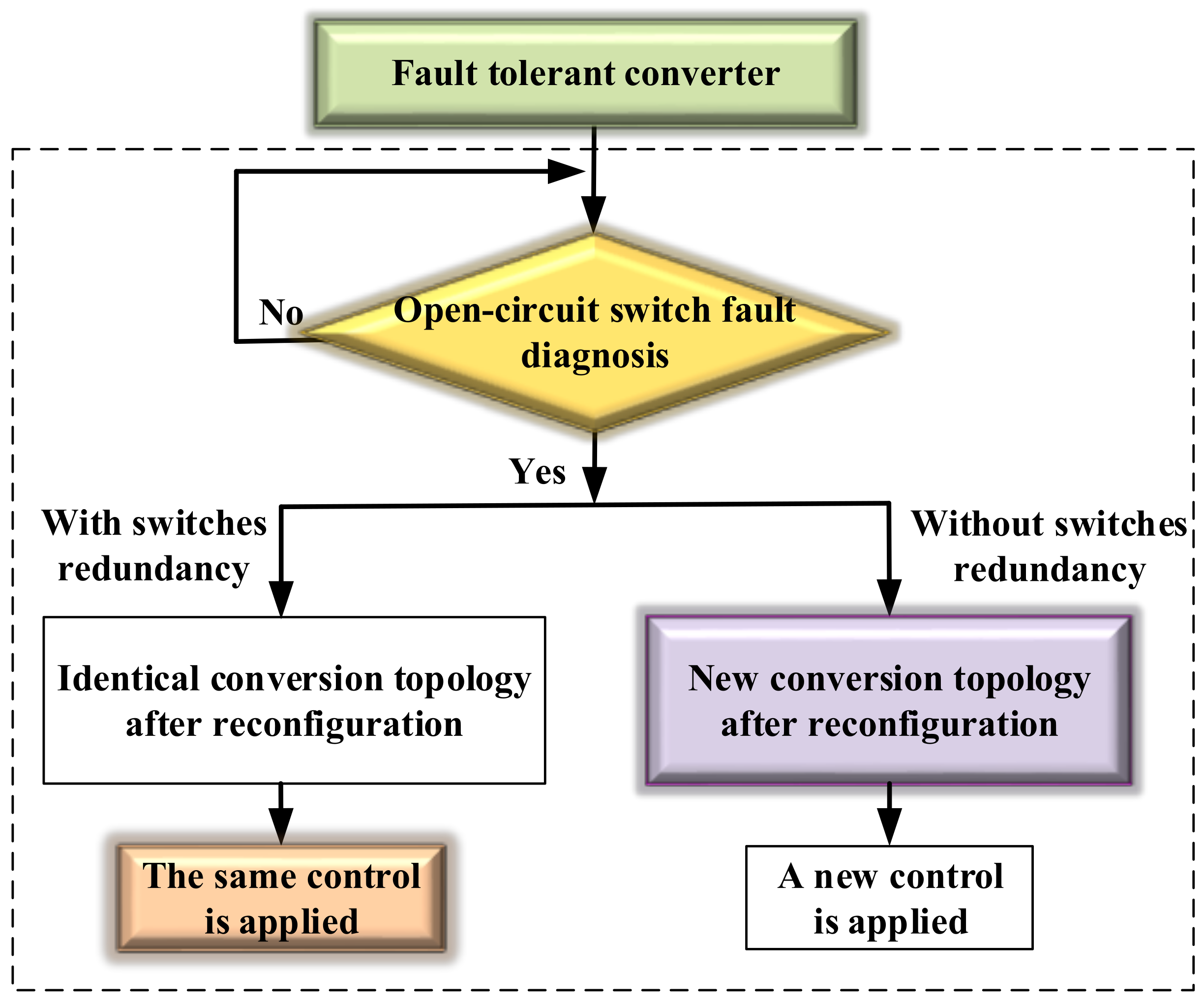
- Remedial actions encompass the reconfiguration of the converter and its associated control, if necessary. Several system reconfiguration approaches have been proposed in the literature, for a fault-tolerant converter with or without redundancy. They are detailed hereafter.
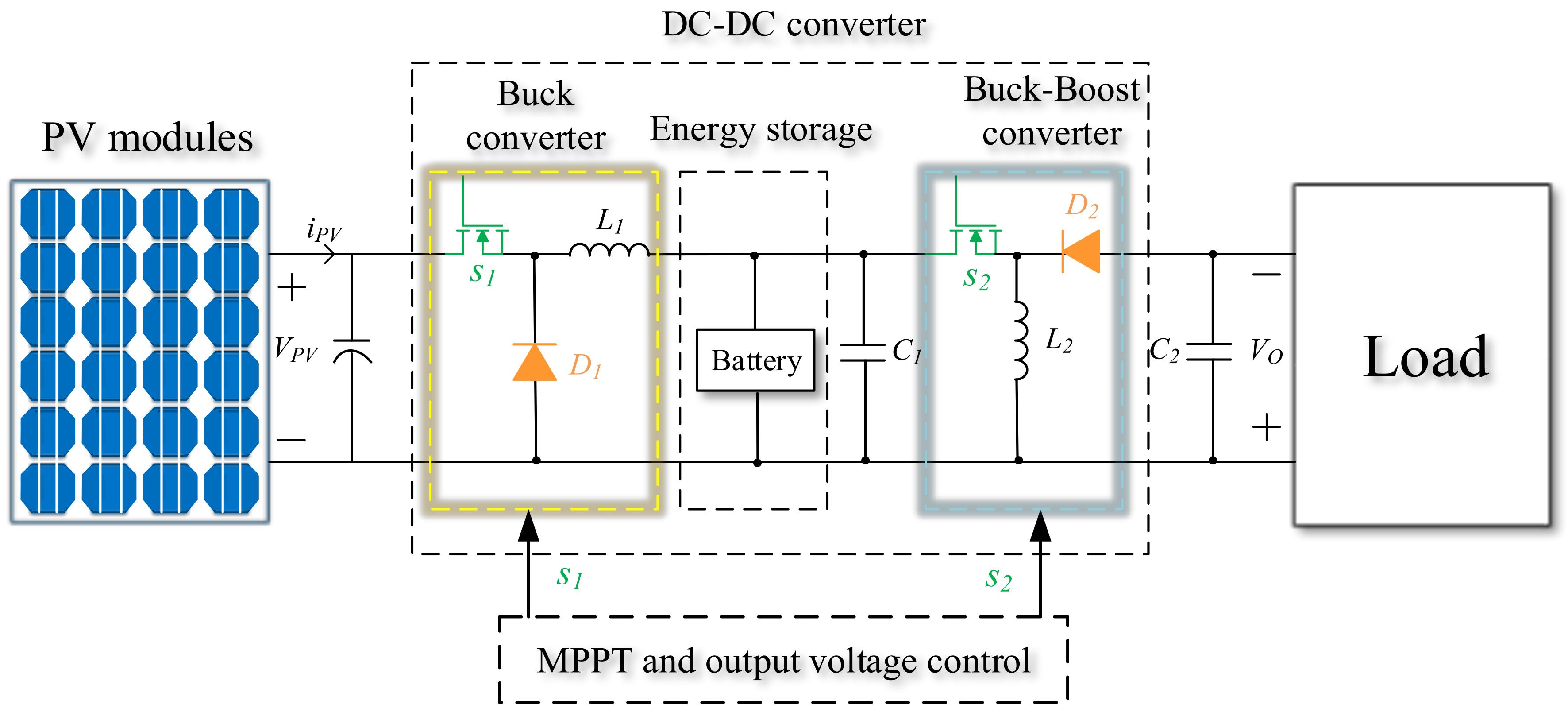
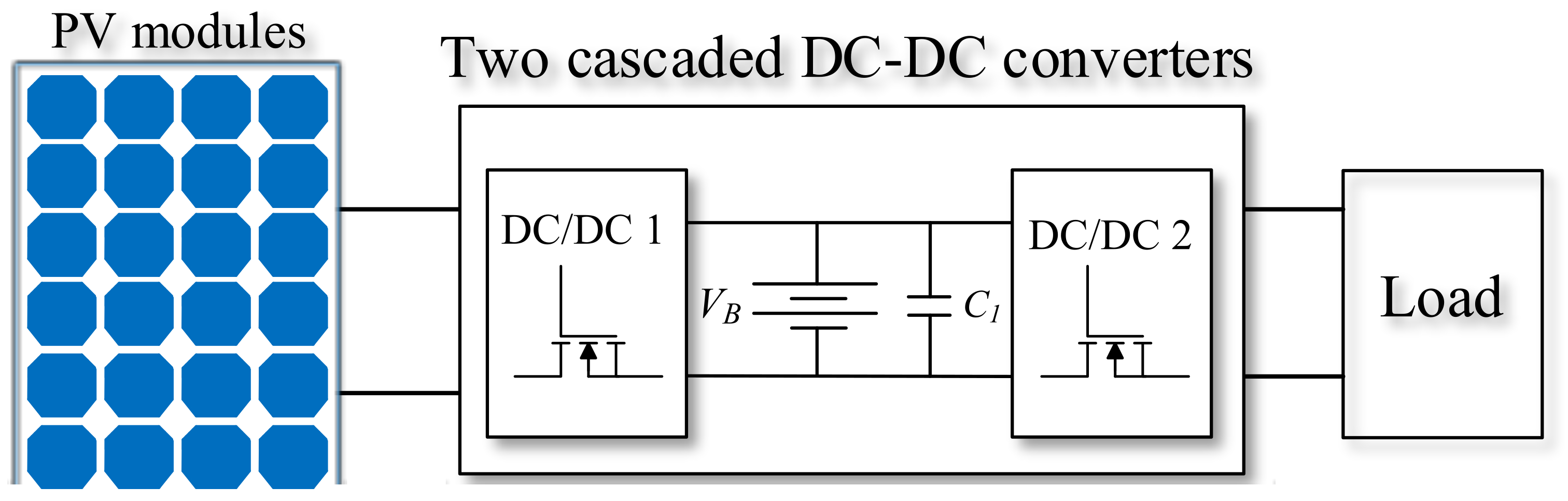
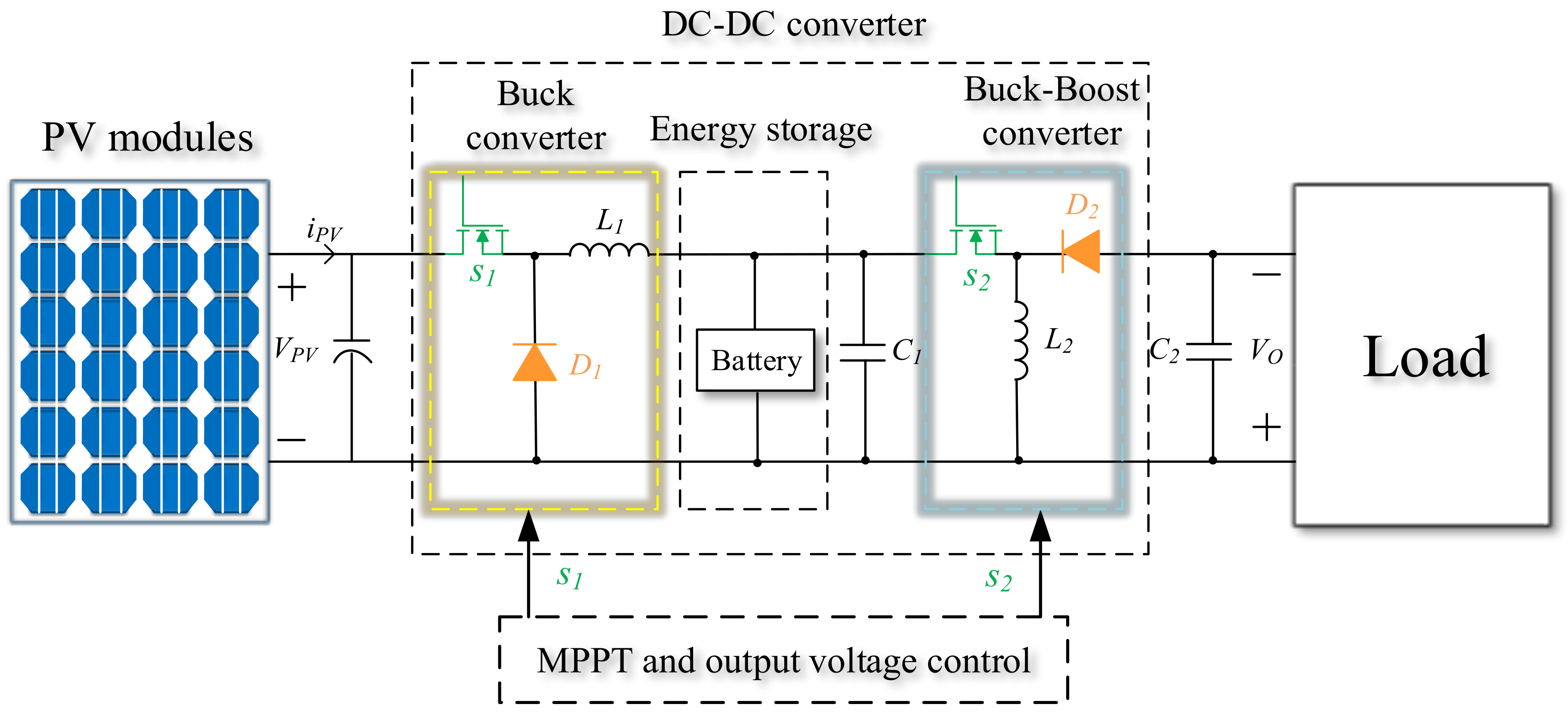
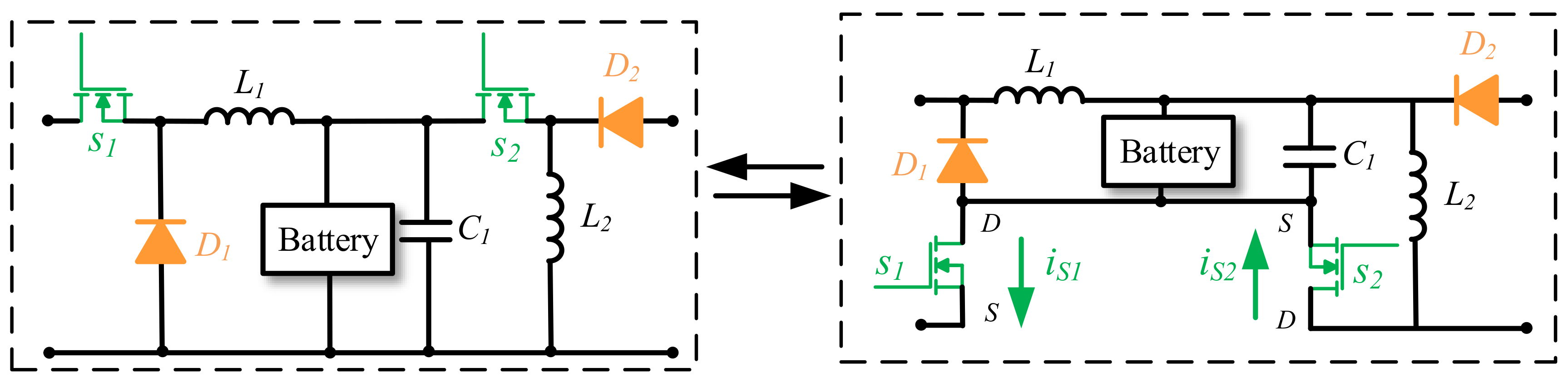
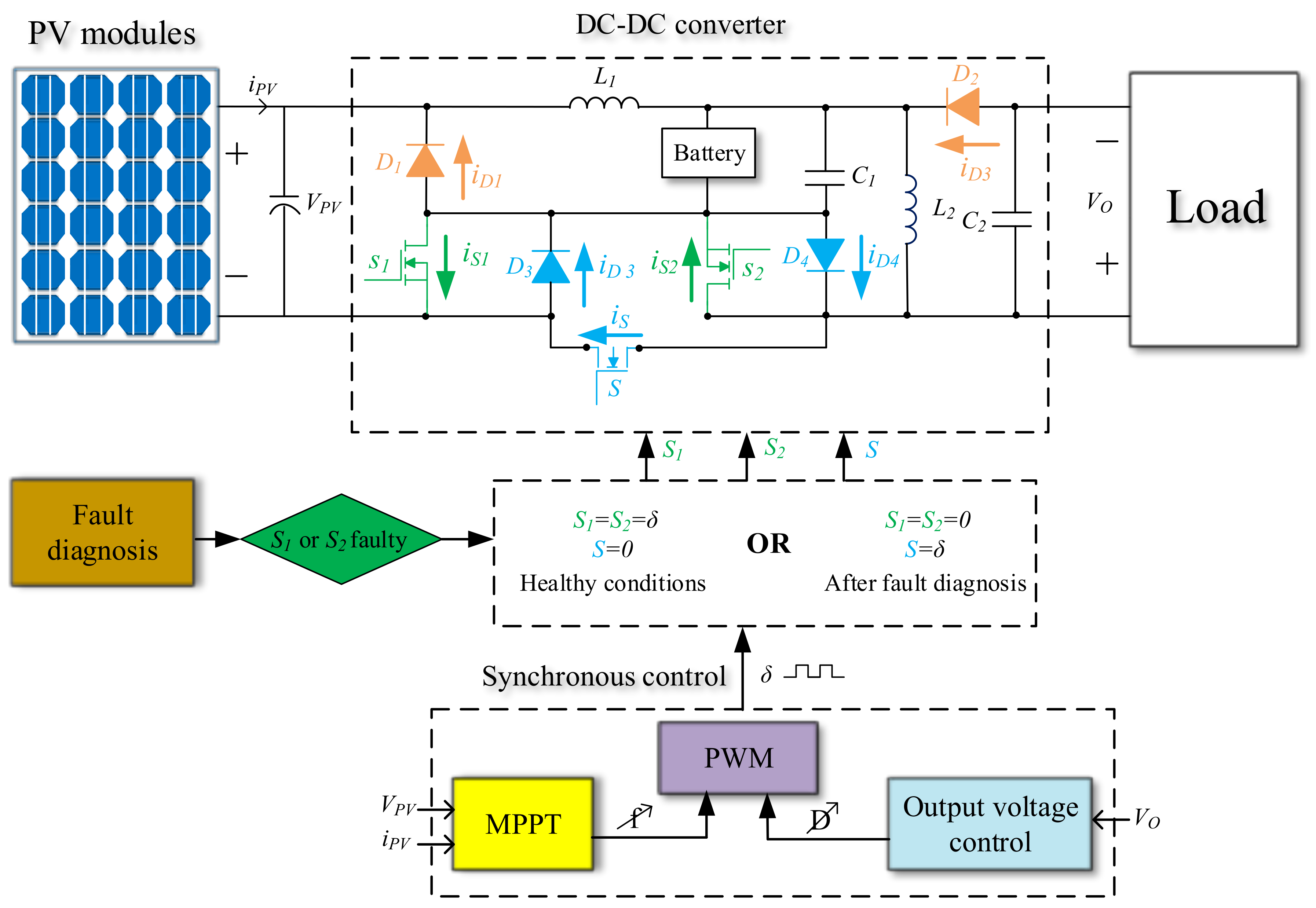
- First, the global service continuity of the two cascaded DC-DC converters circuit is proposed. The proposed approach allows one to ensure the service continuity of the overall conversion circuit by reconfiguring it in the presence of an OCF occurring in one of the two converters. Moreover, only a single redundant switch is used to guarantee the fault-tolerant operation of this two-stage conversion circuit and thus its overall service continuity.
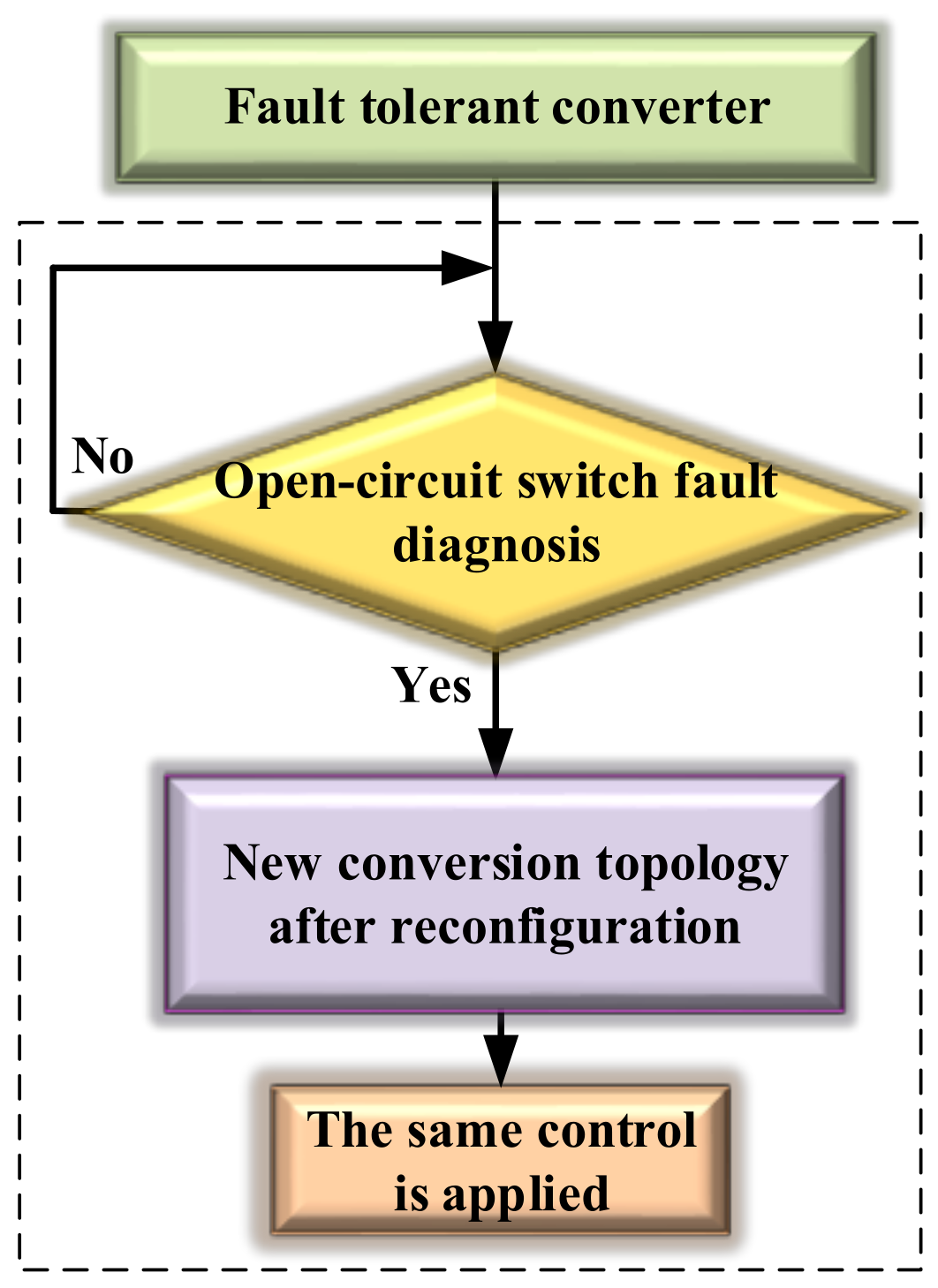
- Second, although the cascaded circuits in healthy and post-fault conditions are not the same, the same control is applied in both operating modes. This unified control is advantageous for the following reasons:
- −
- Reconfiguration time: After an OCF detection, the control used in healthy conditions is not modified; thus, the service continuity is guaranteed with high time performances; in the post-fault operation, the reconfigured converter can be reconfigured and controlled as soon as the OCF is detected.
- −
- Reduced controller complexity: In the proposed system, the so-called “fault-tolerant control” that is always associated with fault-tolerant operation is the same as the control applied in the healthy operation mode: only the choice of the switch(es) to be controlled in healthy conditions or post-fault operation is added. Consequently, the overall controller complexity is reduced as much as possible.
- −
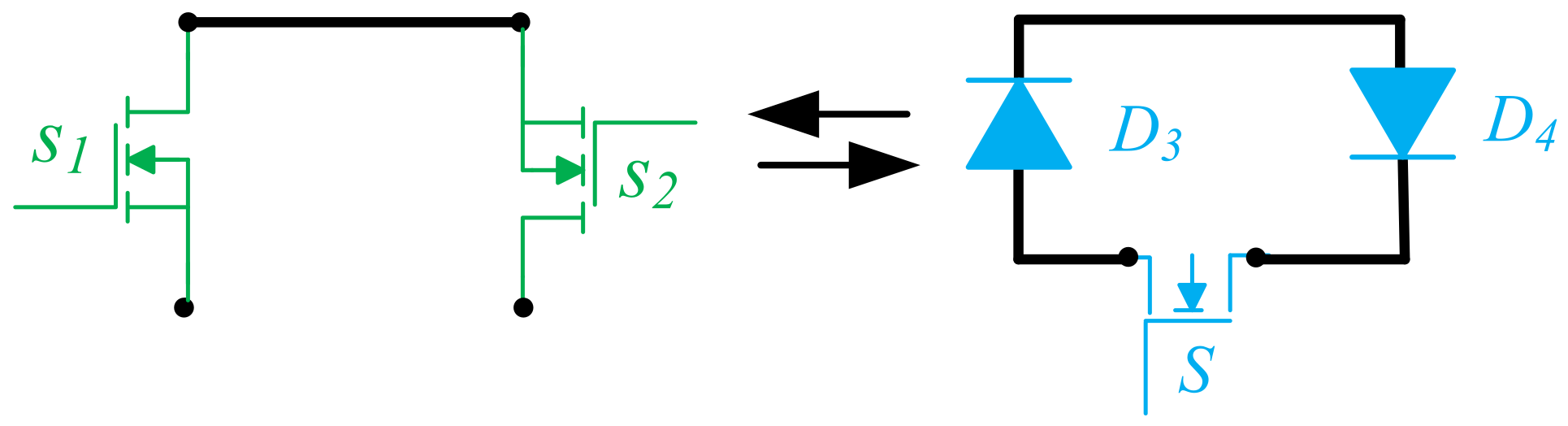
- Operating point maintenance: Even if the operating circuits before and after an OCF detection are not the same, they are electrically equivalent under synchronous control. Thus, applying the same synchronous control after and before the OCF detection and the circuit reconfiguration, the operating point values are maintained, and the load is not stressed with the circuit reconfiguration changes.
- −
- Implementation cost: From the implementation point of view, the reduced complexity of the controller used in both operating modes considerably limits the additional costs needed for its design.
2. Proposed Reconfigurable Converter and Remedial Actions
3. Control of the Proposed Fault-Tolerant Circuit
3.1. Principle of the Control
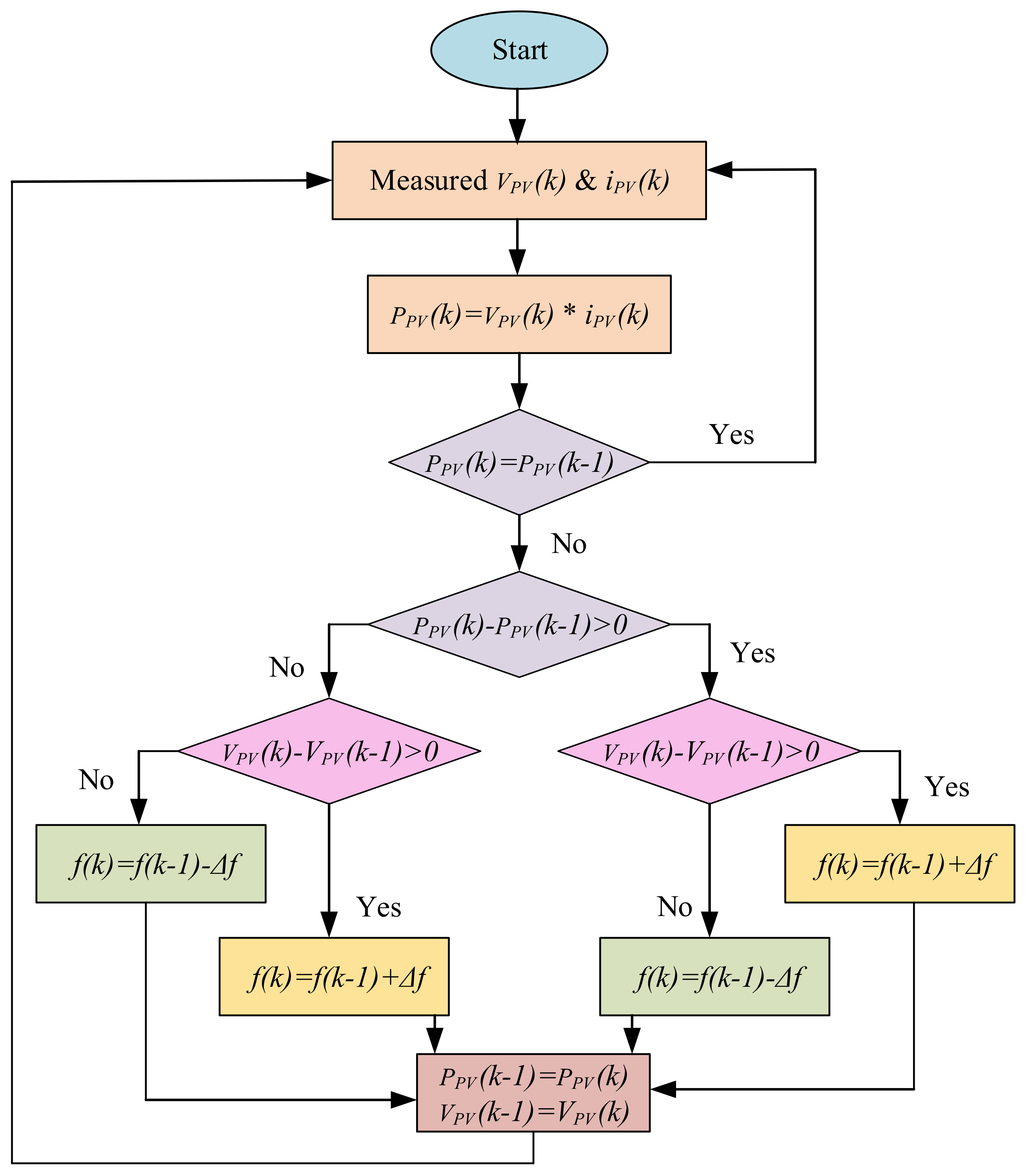
3.2. Maximum Power Point Tracking Algorithm
3.3. Output Voltage Control
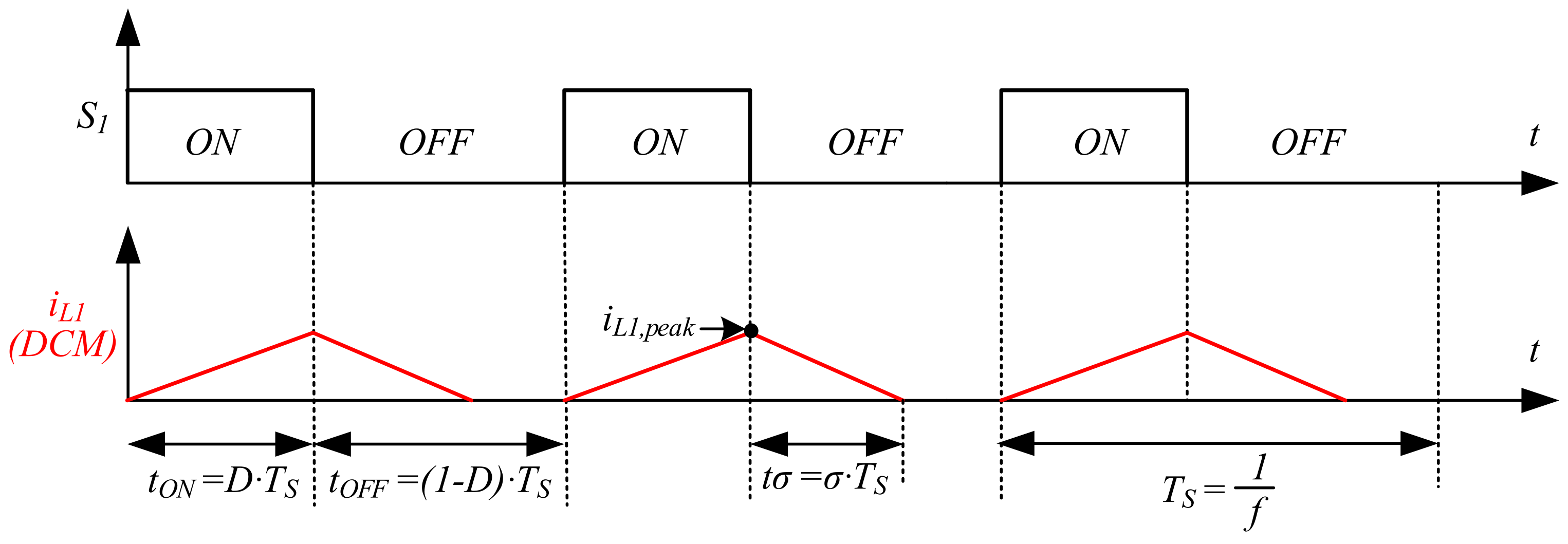
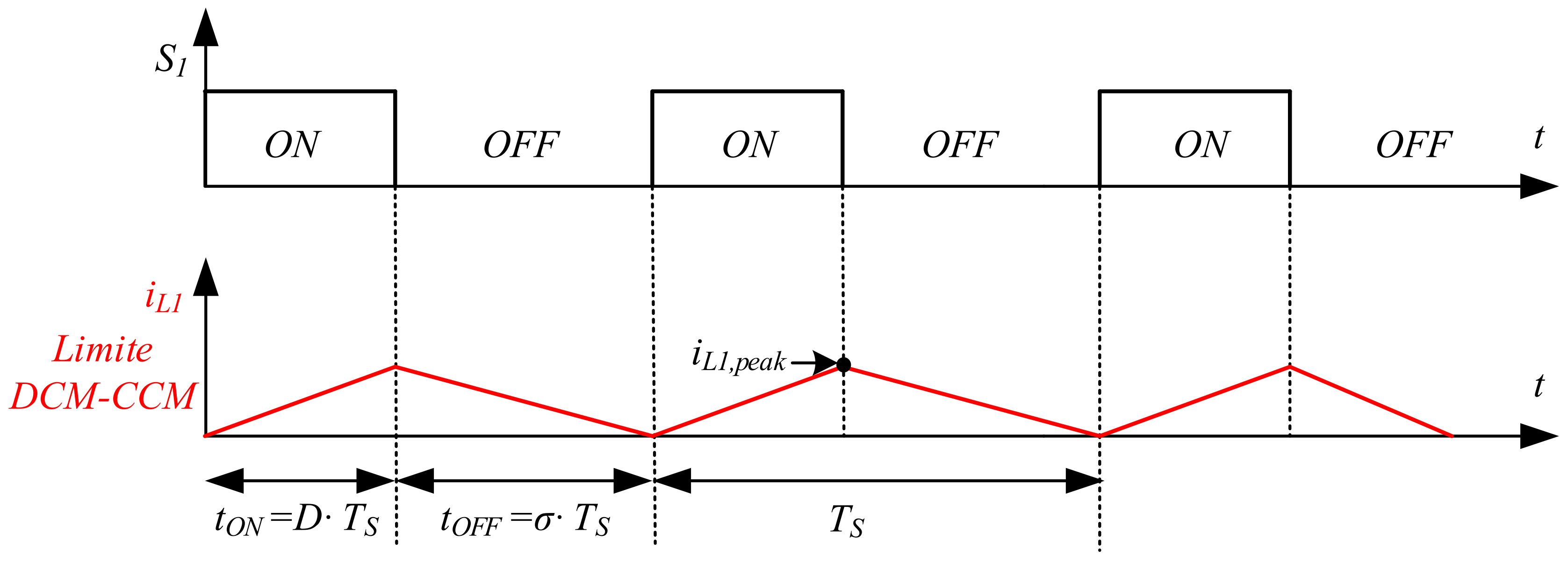
4. Rating of the Inductors and
5. Simulation Results
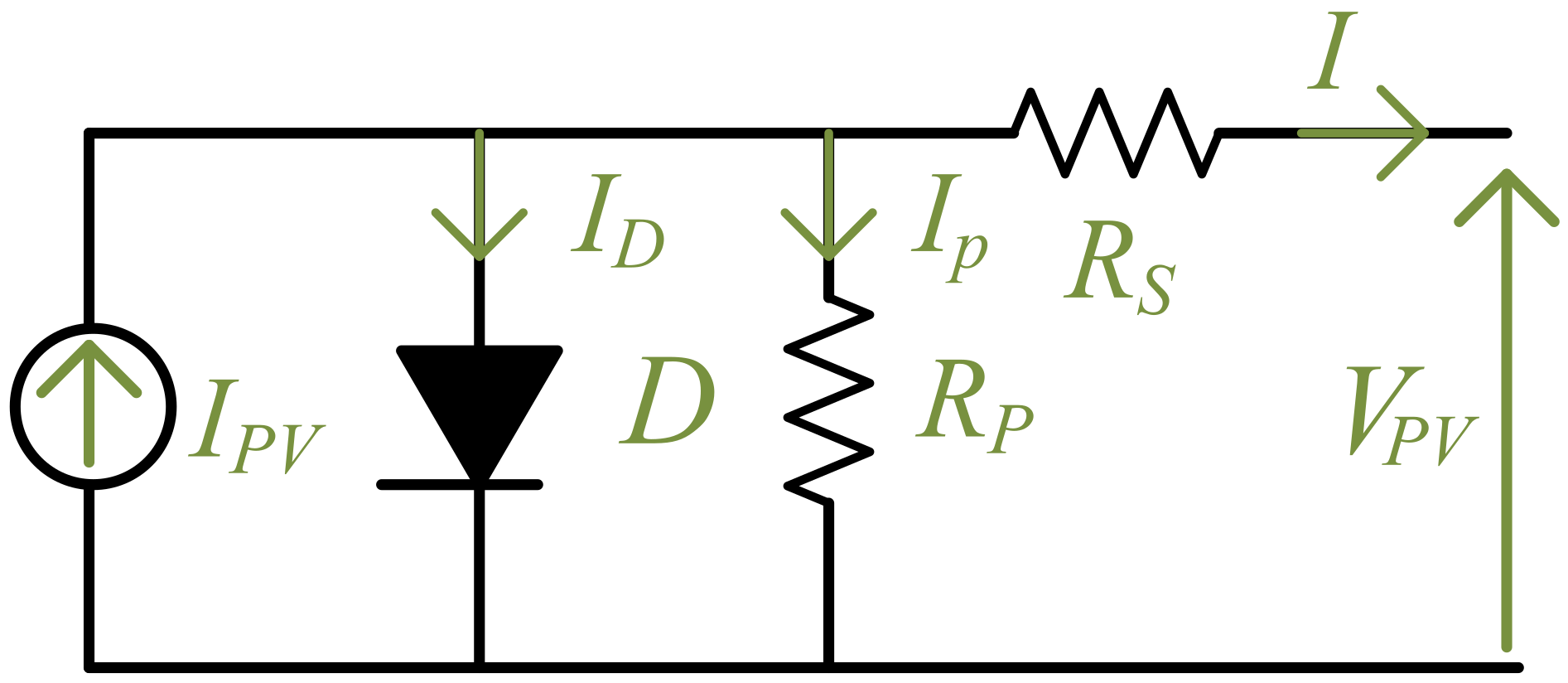
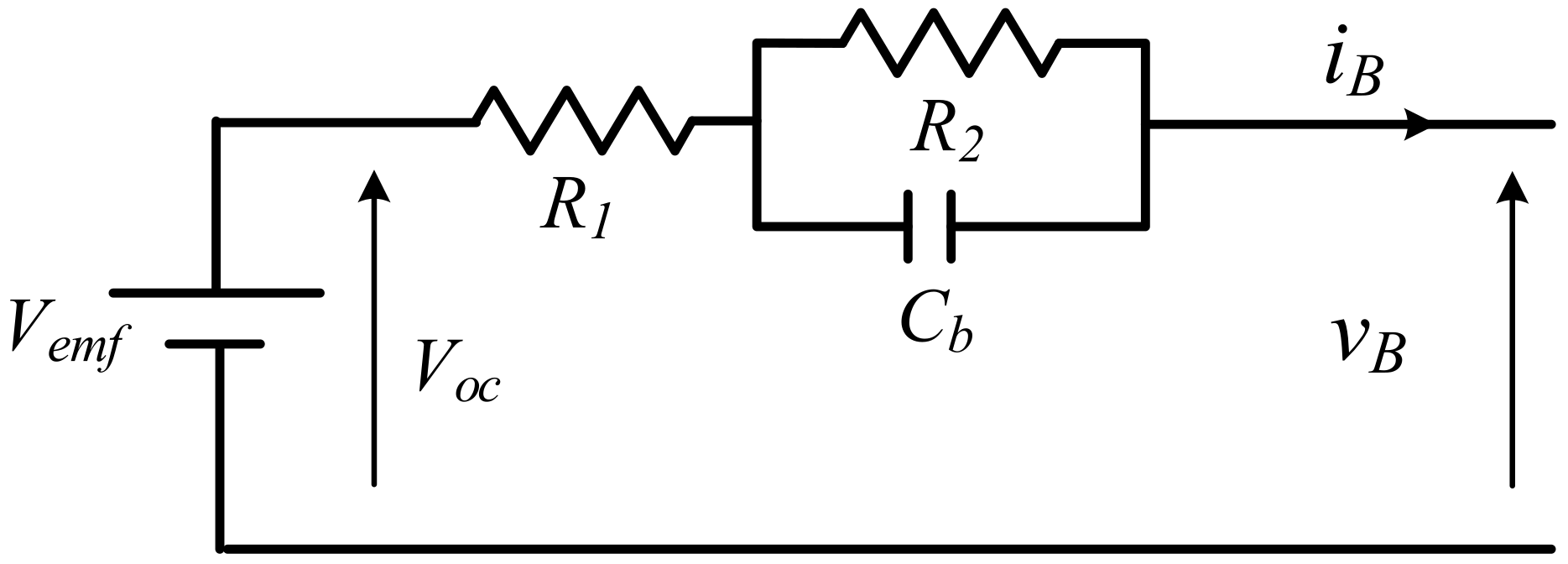
5.1. PV System Modeling
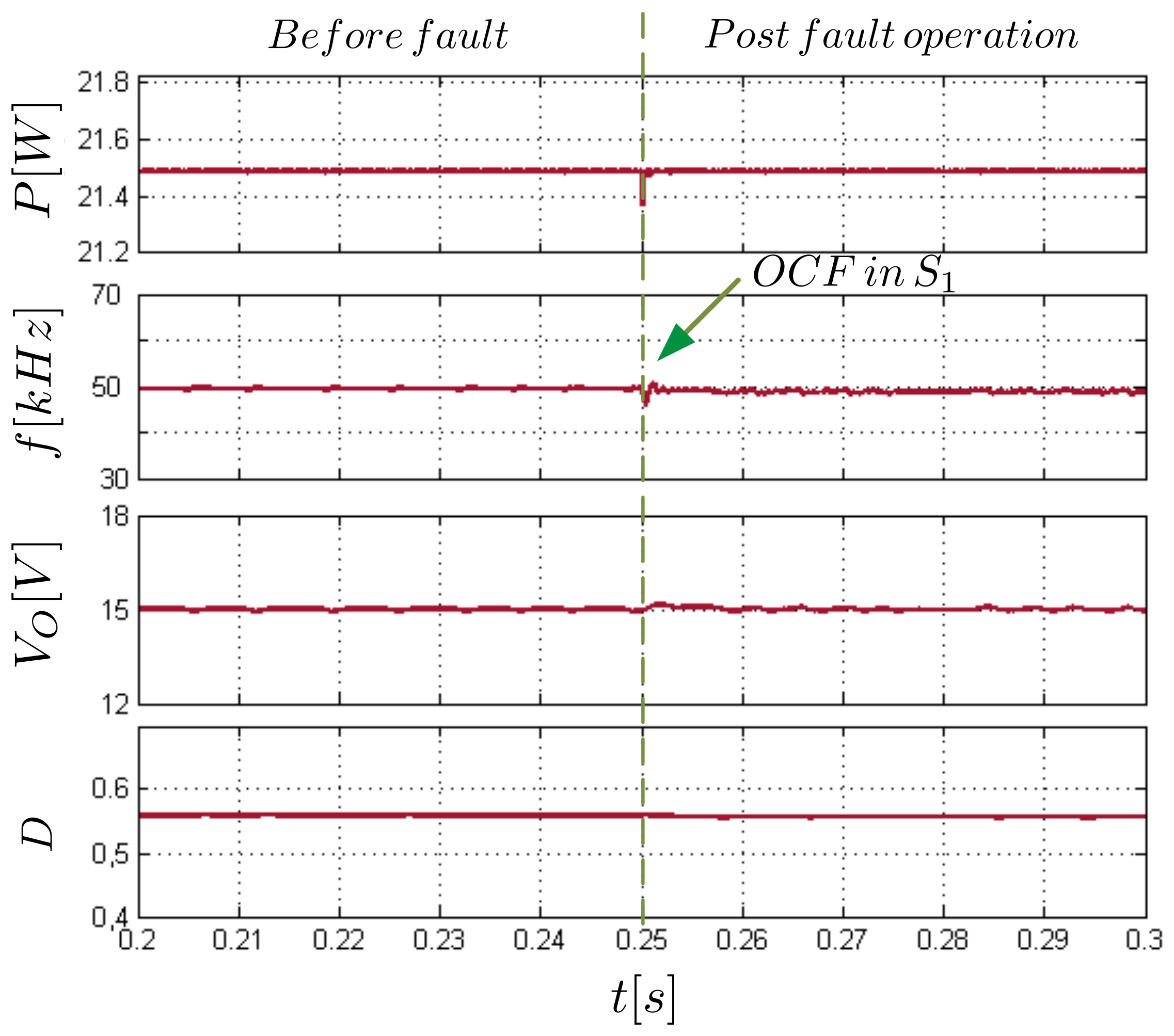
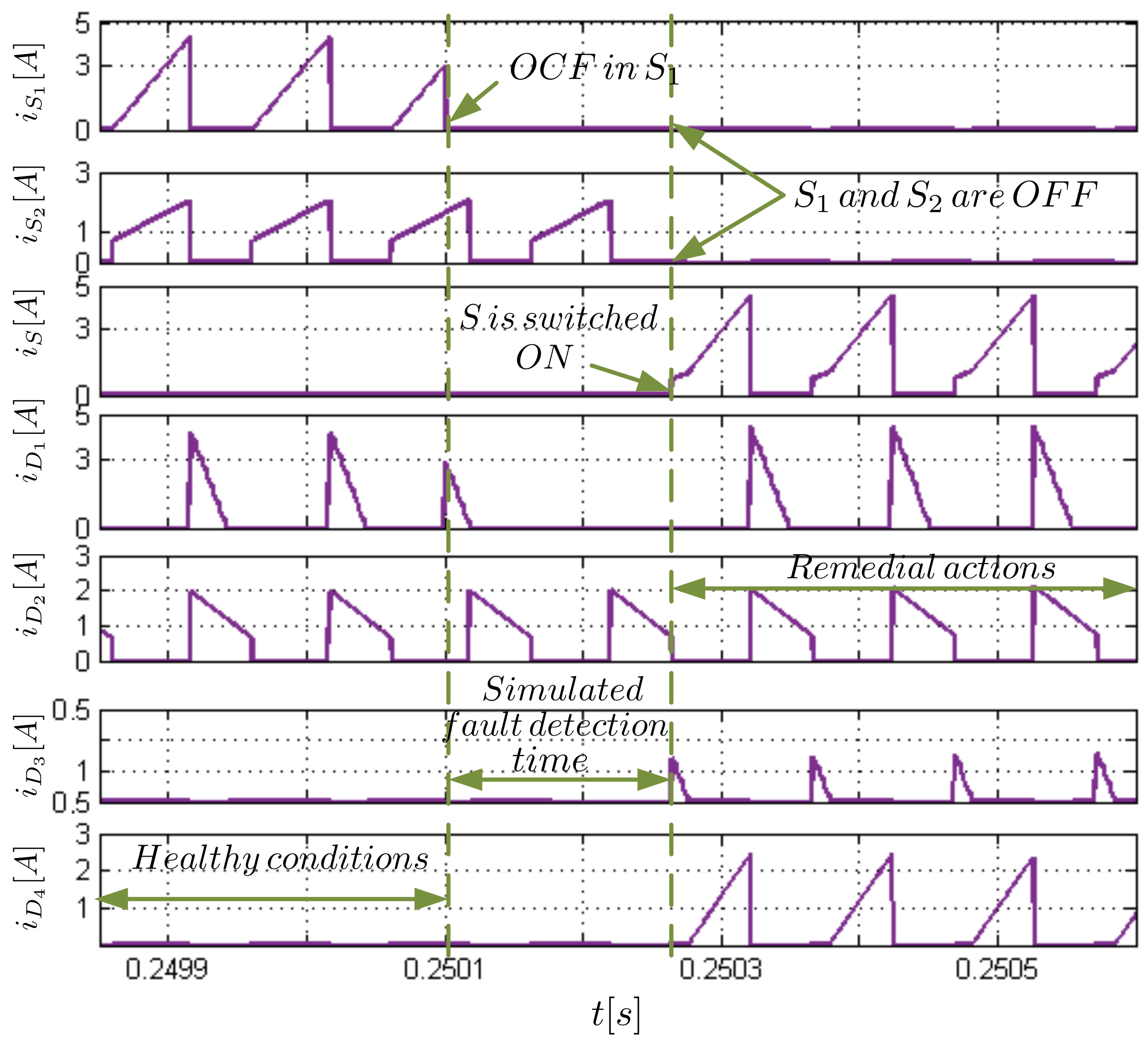
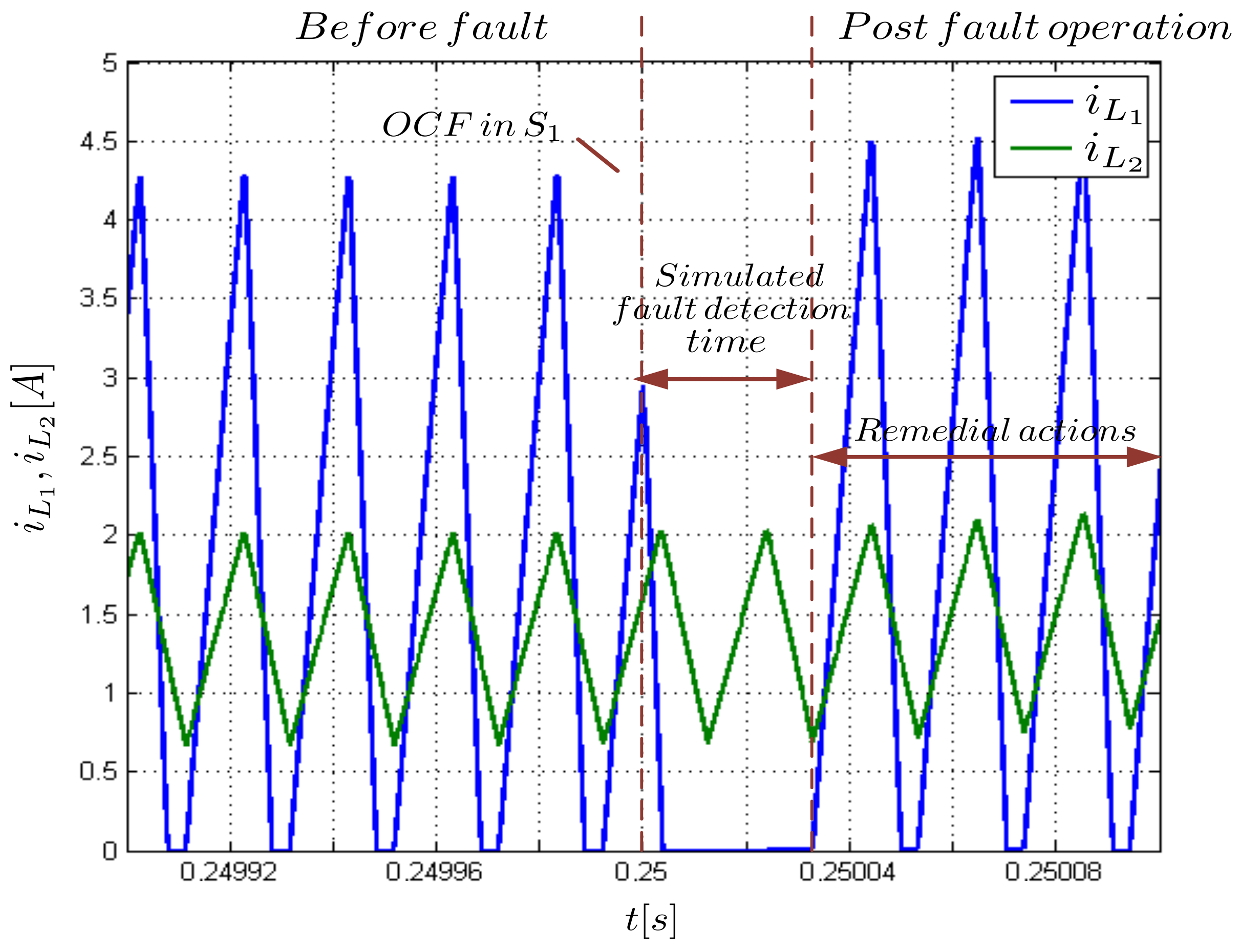
5.2. Simulation Results: OCF in the Switch
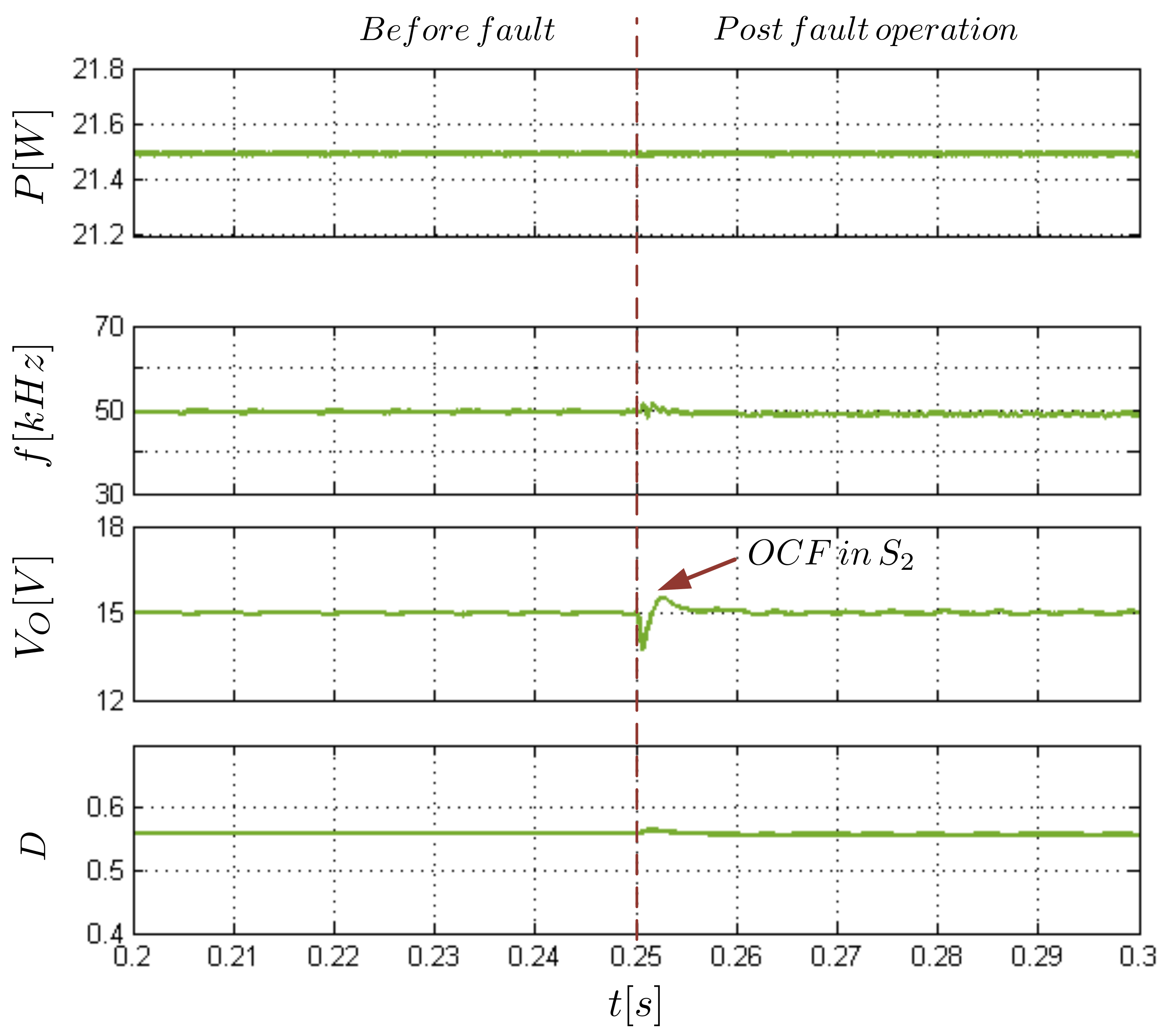
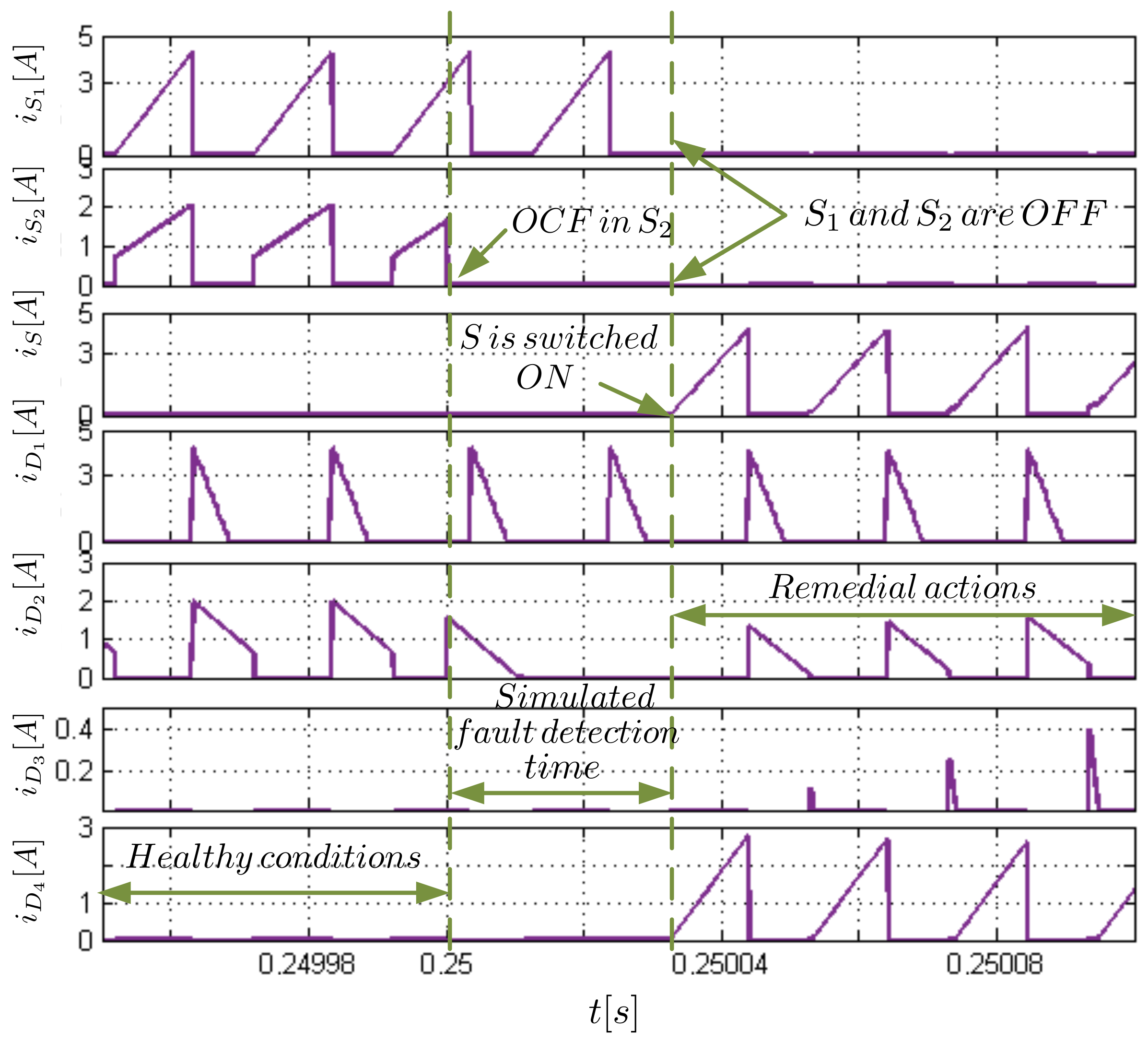
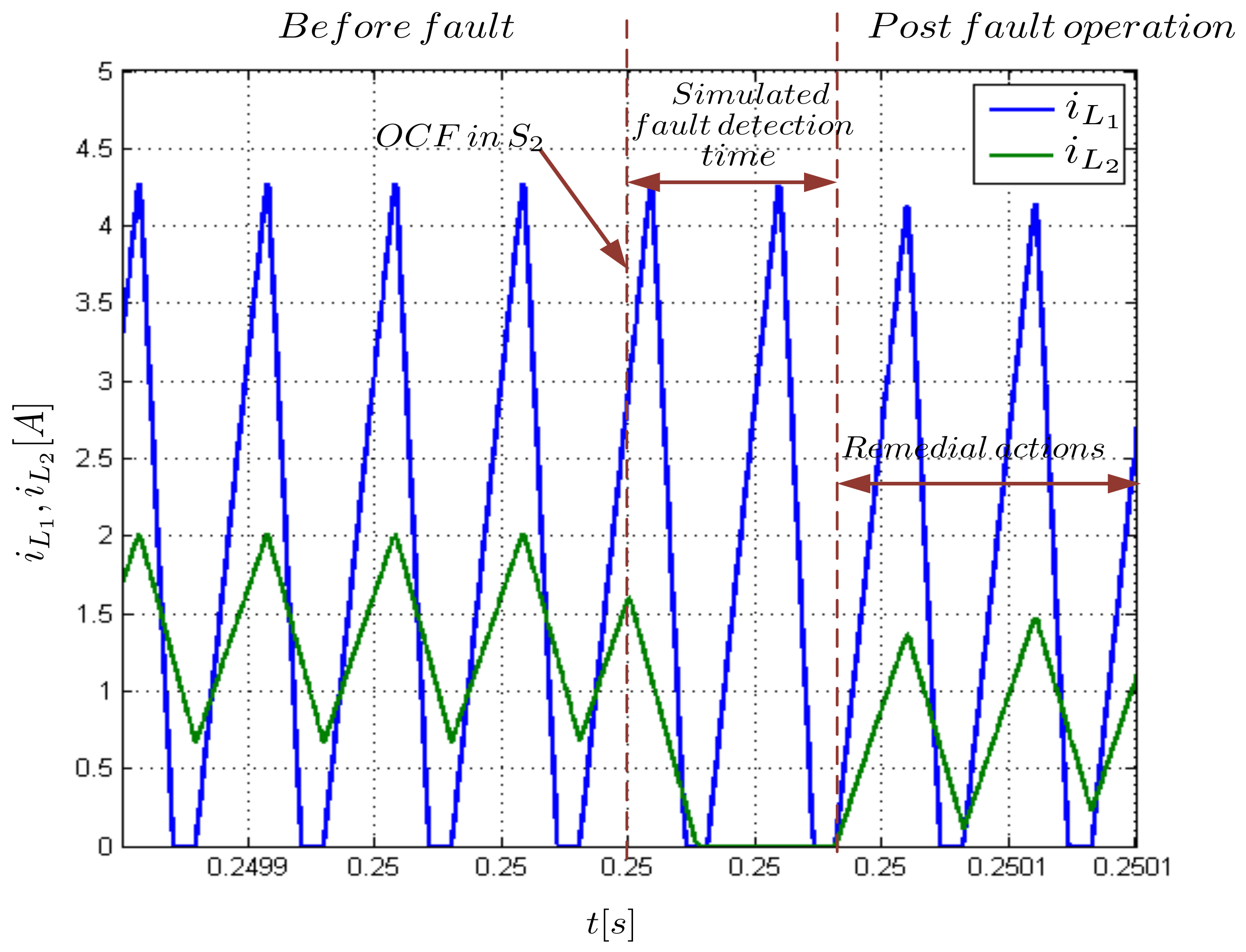
5.3. Simulation Results: OCF in the Switch
6. Discussion and Conclusions
Author Contributions
Conflicts of Interest
References
- Katiraei, F.; Iravani, R.; Hatziargyriou, N.; Dimeas, A. Microgrids management. IEEE Power Energy Mag. 2008, 6. [Google Scholar] [CrossRef]
- Barbosa, P.G.; Braga, H.A.C.; Rodrigues, M.D.C.B.; Teixeira, E.C. boost current multilevel inverter and its application on single-phase grid-connected photovoltaic systems. IEEE Trans. Ind. Electron. 2006, 21, 1116–1124. [Google Scholar] [CrossRef]
- Amaral, A.; Cardoso, A. On line fault detection of aluminium electrolytic capacitors in step-down DC-DC converters using input current and output voltage ripple. IET Power Electron. 2012, 5, 315–322. [Google Scholar] [CrossRef]
- Wu, R.; Blaabjerg, F.; Wang, H.; Liserre, M.; Iannuzzo, F. Catastrophic failure and fault-tolerant design of IGBT power electronic converters—An overview. In Proceedings of the 39th Annual Conference of the IEEE Industrial Electronics Society (IECON 2013), Vienna, Austria, 10–13 November 2013; pp. 507–513. [Google Scholar]
- Jamshidpour, E.; Poure, P.; Saadate, S. Photovoltaic systems reliability improvement by real-time FPGA-based switch failure diagnosis and fault-tolerant DC-DC converter. IEEE Trans. Ind. Electron. 2015, 62, 7247–7255. [Google Scholar] [CrossRef]
- Shahbazi, M.; Jamshidpour, E.; Poure, P.; Saadate, S.; Zolghadri, M.R. Open-and short-circuit switch fault diagnosis for non-isolated DC-DC converters using field programmable gate array. IEEE Trans. Ind. Electron. 2013, 60, 4136–4146. [Google Scholar] [CrossRef]
- Pei, X.; Nie, S.; Chen, Y.; Kang, Y. Open-circuit fault diagnosis and fault-tolerant strategies for full-bridge DC-DC converters. IEEE Trans. Power Electron. 2012, 27, 2550–2565. [Google Scholar] [CrossRef]
- Chen, Y.; Pei, X.; Nie, S.; Kang, Y. Monitoring and diagnosis for the DC-DC converter using the magnetic near field waveform. IEEE Trans. Ind. Electron. 2011, 58, 1634–1647. [Google Scholar] [CrossRef]
- Nie, S.; Pei, X.; Chen, Y.; Kang, Y. Fault diagnosis of PWM DC-DC converters based on magnetic component voltages equation. IEEE Trans. Power Electron. 2014, 29, 4978–4988. [Google Scholar] [CrossRef]
- Park, T.; Kim, T. Novel fault tolerant power conversion system for hybrid electrical vehicles. In Proceedings of the Vehicle Power and Propulsion Conference (VPPC), Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar]
- Ribeiro, E.; Cardoso, A.J.M.; Boccaletti, C. Fault tolerant strategy for a photovoltaic DC-DC converter. IEEE Trans. Power Electron. 2013, 28, 3008–3018. [Google Scholar] [CrossRef]
- Zhao, J.; Iu, H.H.; Fernando, T.; An, L.; Lu, D.D.C. Design of a non-isolated single-switch three-port DC-DC converter for standalone PV-battery power system. In Proceedings of the 2015 IEEE International Symposium on Circuits and Systems (ISCAS), Lisbon, Portugal, 24–27 May 2015; pp. 2493–2496. [Google Scholar]
- Zhao, J.; Iu, H.H.; Fernando, T. The design of cascaded DC-DC converters with single-switch PWM and PFM for standalone PV power applications. In Proceedings of the IEEE 3rd International Future Energy Electronics Conference and ECCE Asia, Kaohsiung, Taiwan, 3–7 June 2017; pp. 122–126. [Google Scholar]
- Suntio, T.; Messo, T.; Aapro, A.; Kivimäki, J.; Kuperman, A. Review of PV generator as an input source for power electronic converters. Energies 2017, 10, 1076. [Google Scholar] [CrossRef]
- Wu, T.F.; Yu, T.H. Unified approach to developing single-stage power converters. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 211–223. [Google Scholar]
- Siouane, S.; Jovanović, S.; Poure, P. Service Continuity of PV Synchronous buck/buck-boost Converter with Energy Storage. In Proceedings of the IEEE International Conference on Environment and Electrical Engineering (EEEIC), Milan, Italy, 6–9 June 2017; pp. 1–6. [Google Scholar]
- Kwon, J.M.; Nam, K.H.; Kwon, B.H. Photovoltaic power conditioning system with line connection. IEEE Trans. Ind. Electron. 2006, 53, 1048–1054. [Google Scholar] [CrossRef]
- Pandey, A.; Dasgupta, N.; Mukerjee, A.K. A simple single-sensor MPPT solution. IEEE Trans. Power Electron. 2007, 22, 698–700. [Google Scholar] [CrossRef]
- Jain, S.; Agarwal, V. A new algorithm for rapid tracking of approximate maximum power point in photovoltaic systems. IEEE Power Electron. Lett. 2004, 2, 16–19. [Google Scholar] [CrossRef]
- De Brito, M.A.G.; Galotto, L.; Sampaio, L.P.; e Melo, G.D.A.; Canesin, C.A. Evaluation of the main MPPT techniques for photovoltaic applications. IEEE Trans. Ind. Electron. 2013, 60, 1156–1167. [Google Scholar] [CrossRef]
- Esram, T.; Kimball, J.W.; Krein, P.T.; Chapman, P.L.; Midya, P. Dynamic maximum power point tracking of photovoltaic arrays using ripple correlation control. IEEE Trans. Power Electron. 2006, 21, 1282–1291. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of perturb and observe maximum power point tracking method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Bianconi, E.; Calvente, J.; Giral, R.; Mamarelis, E.; Petrone, G.; Ramos-Paja, C.A.; Spagnuolo, G.; Vitelli, M. A Fast Current-Based MPPT Technique Employing Sliding Mode Control. IEEE Trans. Ind. Electron. 2013, 60, 1168–1178. [Google Scholar] [CrossRef]
- Rakhshan, M.; Vafamand, N.; Khooban, M.H.; Blaabjerg, F. Maximum Power Point Tracking Control of Photovoltaic Systems: A Polynomial Fuzzy Model-Based Approach. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 292–299. [Google Scholar] [CrossRef]
- Fronczak, K.C. Stability Analysis of Switched DC-DC boost Converters for Integrated Circuits. Master’s Thesis, Rochester Institute of Technology, New York, NY, USA, 2013. [Google Scholar]
- Villalva, M.G.; Gazoli, J.R.; Filho, E.R. Comprehensive approach to modeling and simulation of photovoltaic arrays. IEEE Trans. Power Electron. 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- Tsai, H.L. Insolation-oriented model of photovoltaic module using Matlab/Simulink Solar Energy. Sol. Energy 2010, 84, 1318–1326. [Google Scholar] [CrossRef]
- Suskis, P.; Galkin, I. Enhanced photovoltaic panel model for Matlab-Simulink environment considering solar cell junction capacitance. In Proceedings of the IEEE Industrial Electronics Society Conference (IECON), Vienna, Austria, 10–13 November 2013; pp. 1613–1618. [Google Scholar]
- Energy Matters. Available online: https://www.energymatters.com.au/bp-solar-panel-10watt-12volt-polycrystalline-p-7.html (accessed on 23 May 2018).
- Tani, A.; Camara, M.B.; Dakyo, B. Energy management in the decentralized generation systems based on renewable energy—Ultracapacitors and battery to compensate the wind/load power fluctuations. IEEE Trans. Ind. Appl. 2015, 51, 1817–1827. [Google Scholar] [CrossRef]
- Jang, J.; Yoo, J. Equivalent circuit evaluation method of lithium polymer battery using bode plot and numerical analysis. IEEE Trans. Energy Convers. 2011, 26, 290–298. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elements | Value | |
|---|---|---|
| 1.2 A | ||
| 17.5 V | ||
| PV | 1.5 m | |
| n | ||
| A |
| Elements | Value | |
|---|---|---|
| 15 H | ||
| 100 H | ||
| DC-DC | 100 F | |
| 22 F | ||
| 12 V |
| Parameters | Values | Description |
|---|---|---|
| 12 V | Open-circuit voltage of the battery | |
| 1 m | Serial internal resistance | |
| 1.5 m | Parallel resistance | |
| 4581 F | Parallel capacitor |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siouane, S.; Jovanović, S.; Poure, P. Service Continuity of PV Synchronous Buck/Buck-Boost Converter with Energy Storage†. Energies 2018, 11, 1369. https://doi.org/10.3390/en11061369
Siouane S, Jovanović S, Poure P. Service Continuity of PV Synchronous Buck/Buck-Boost Converter with Energy Storage†. Energies. 2018; 11(6):1369. https://doi.org/10.3390/en11061369
Chicago/Turabian StyleSiouane, Saima, Slaviša Jovanović, and Philippe Poure. 2018. "Service Continuity of PV Synchronous Buck/Buck-Boost Converter with Energy Storage†" Energies 11, no. 6: 1369. https://doi.org/10.3390/en11061369
APA StyleSiouane, S., Jovanović, S., & Poure, P. (2018). Service Continuity of PV Synchronous Buck/Buck-Boost Converter with Energy Storage†. Energies, 11(6), 1369. https://doi.org/10.3390/en11061369