Analysis and Elimination of Dead-Time Effect in Wireless Power Transfer System

 ,
,
Abstract
:1. Introduction
2. Modeling of WPT System
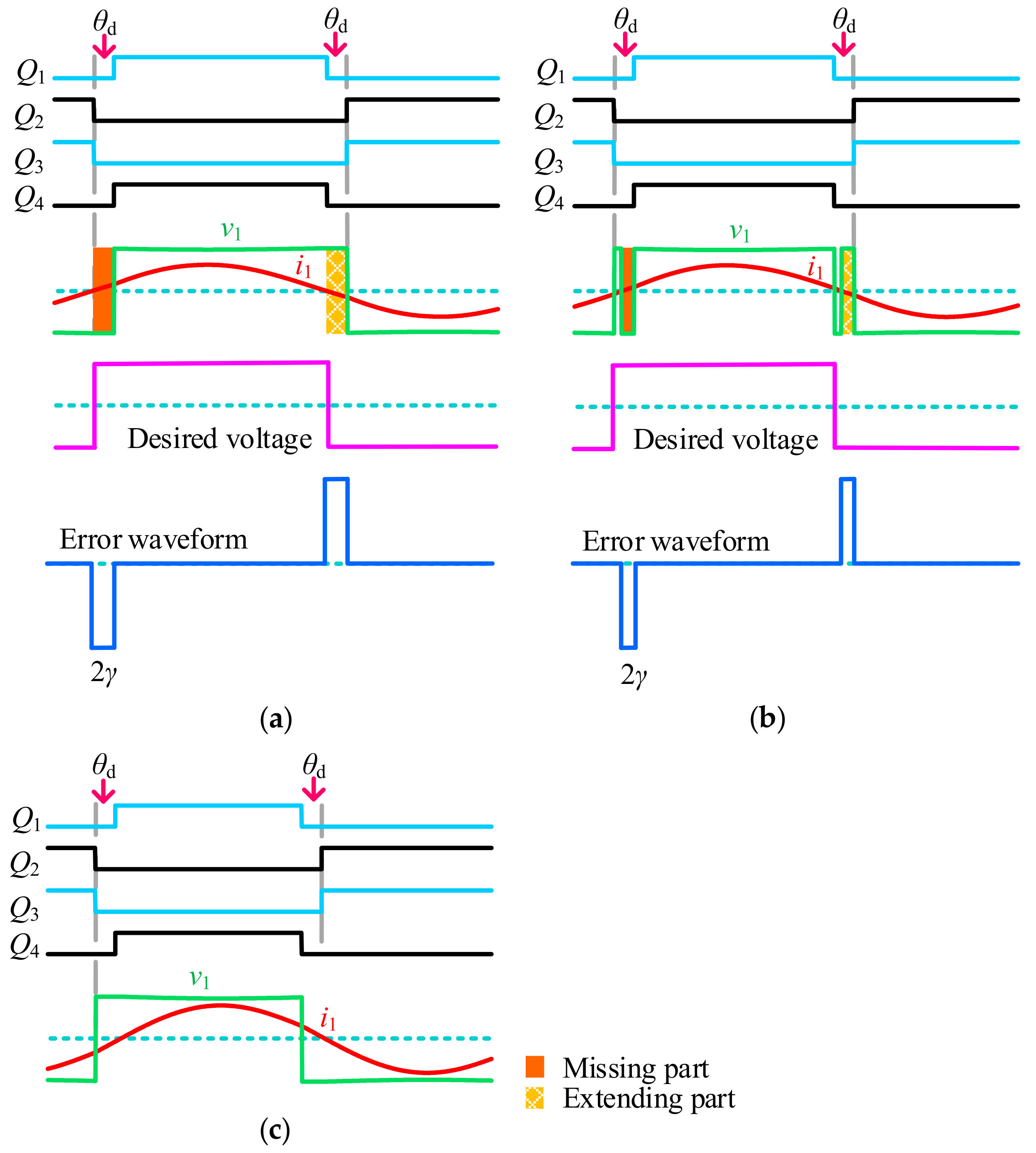
2.1. Dead-Time Effect of One Active Bridge WPT System
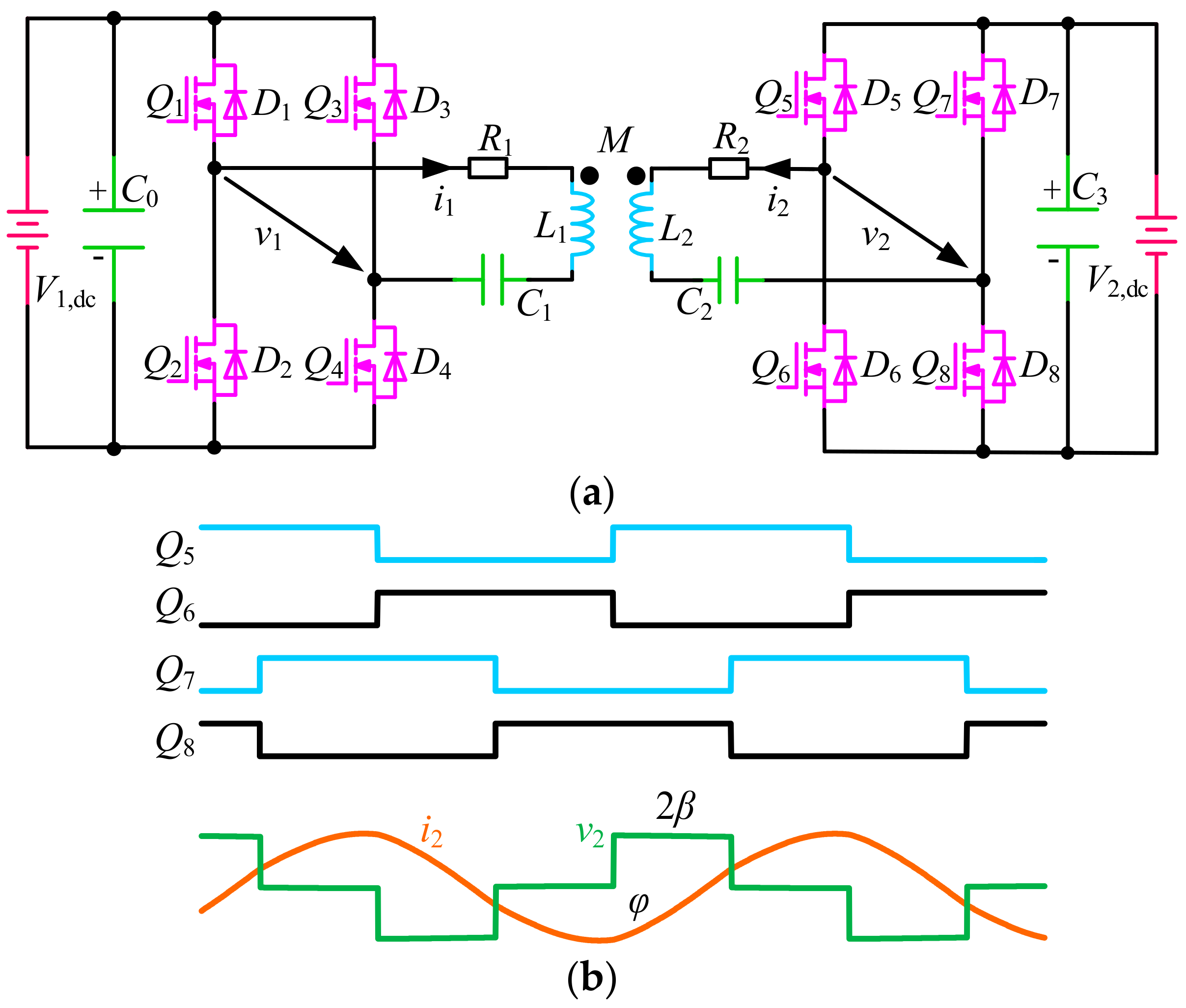
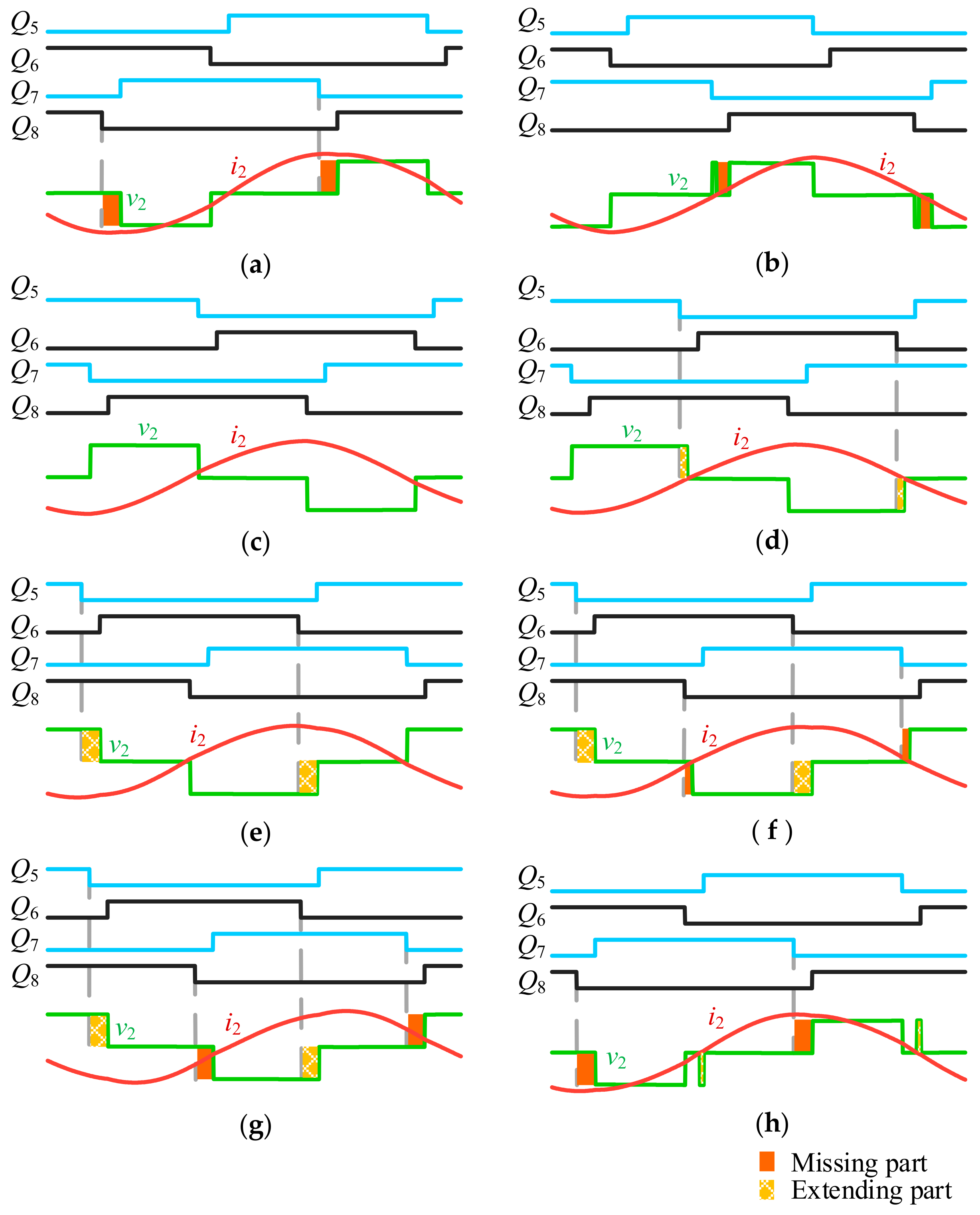
2.2. Dead-Time Effect of DAB WPT System
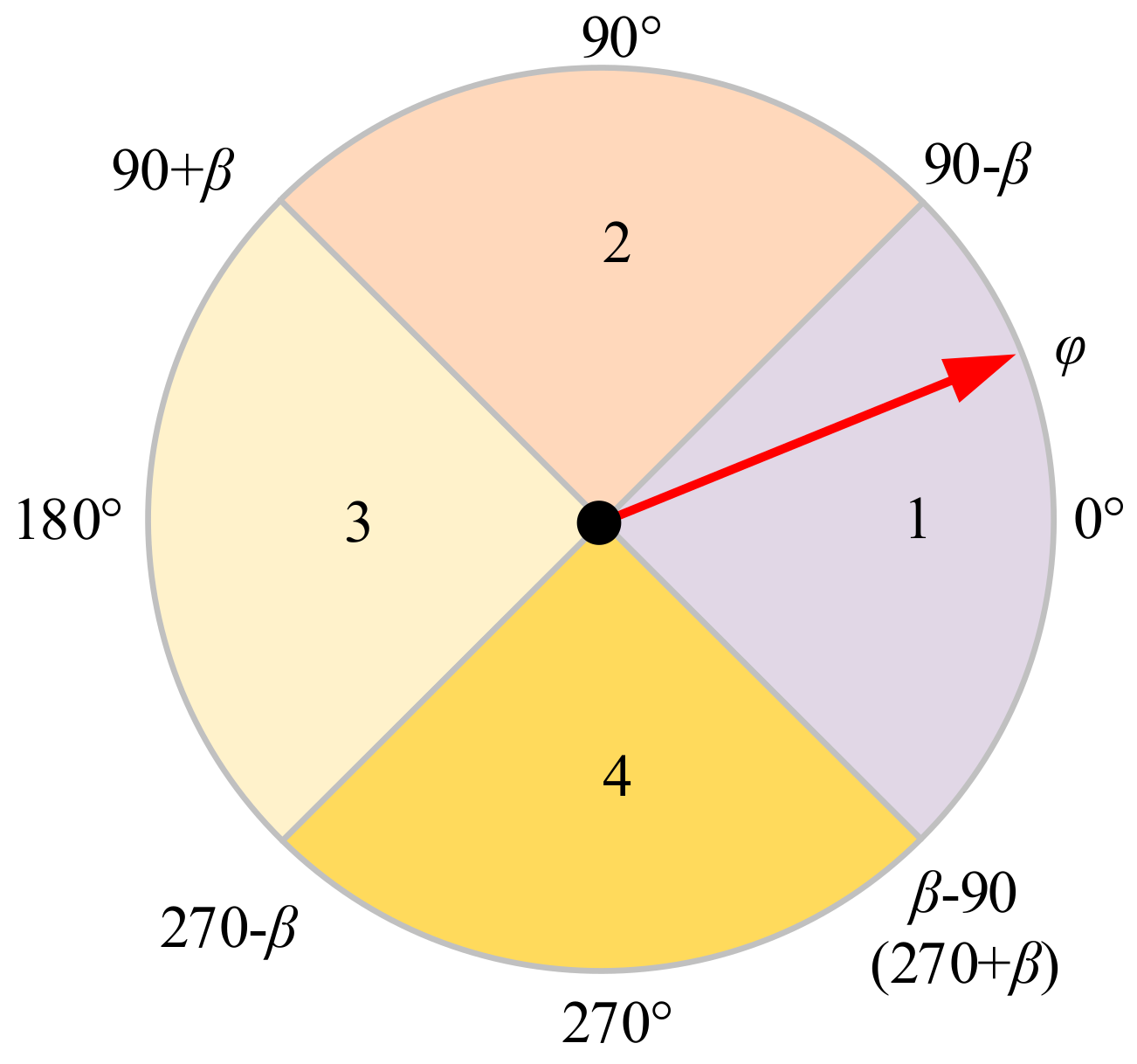
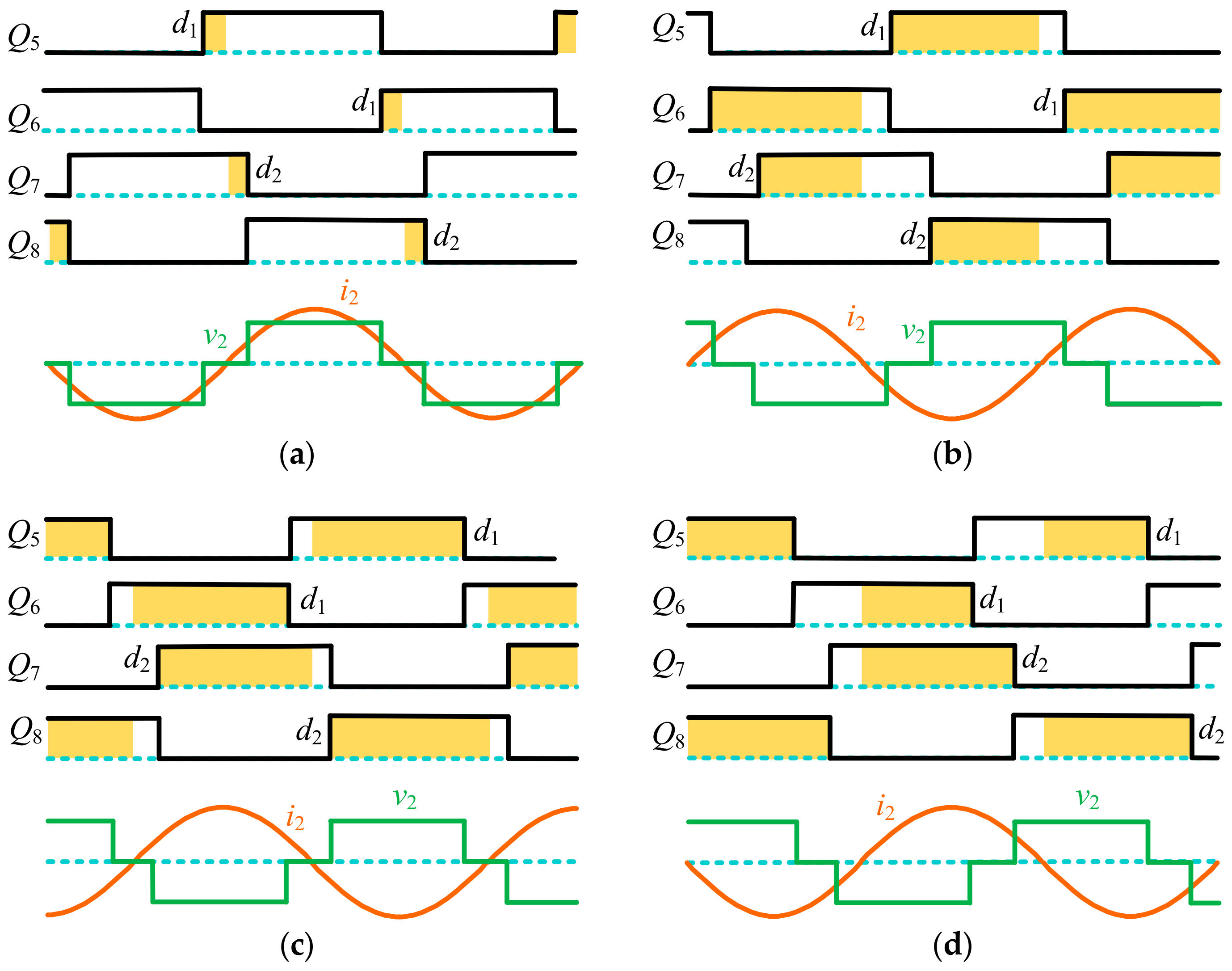
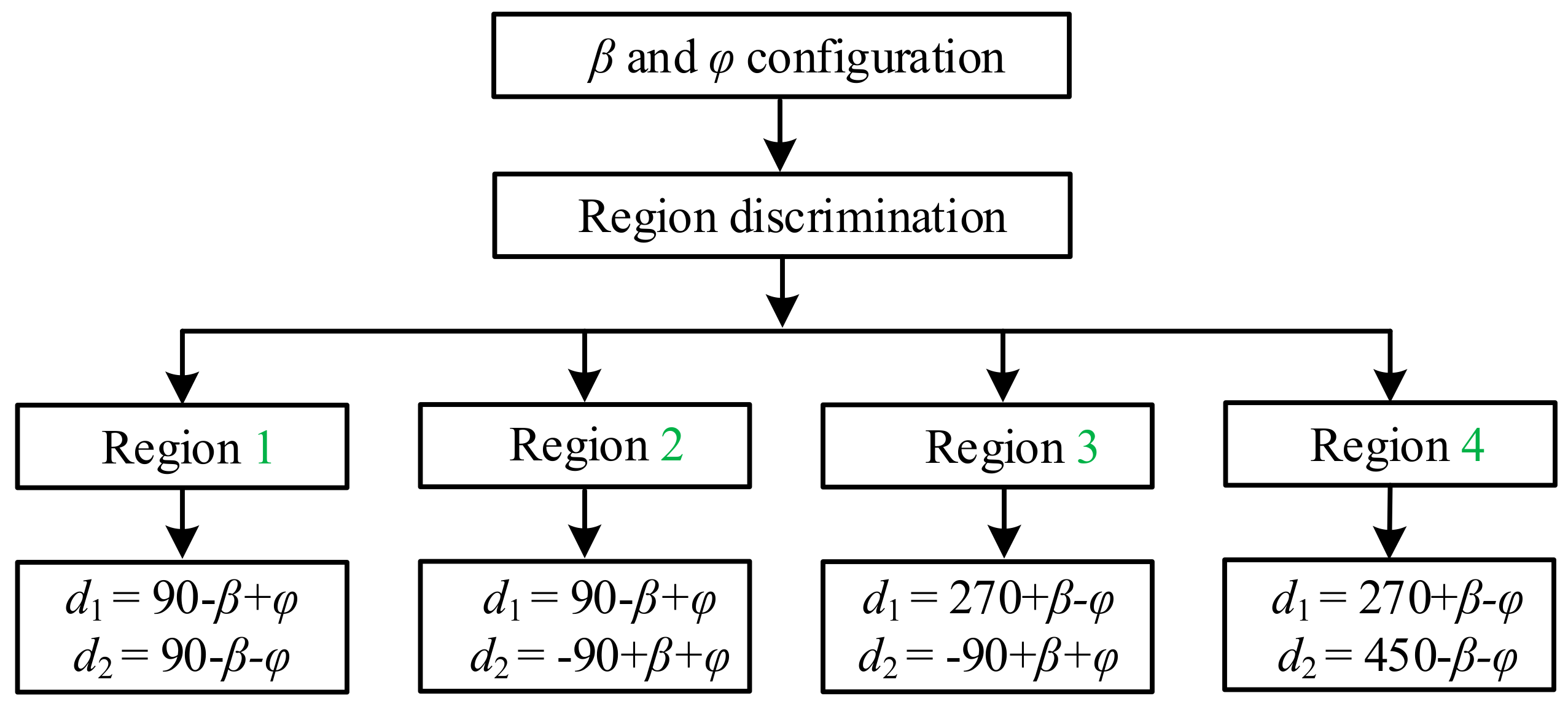
3. Dead-Time Elimination
4. Simulations and Experiments
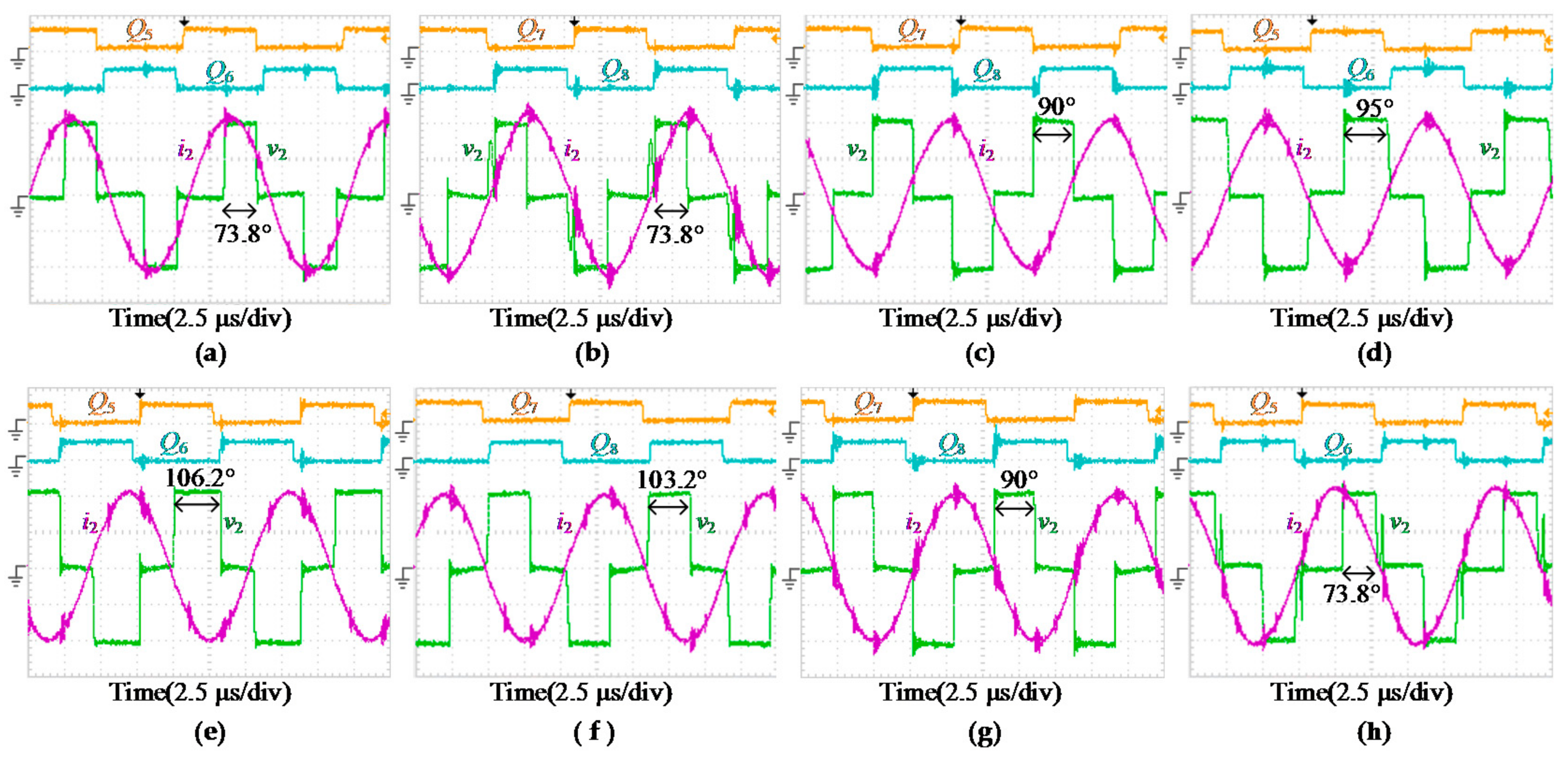
4.1. Dead-Time Effect
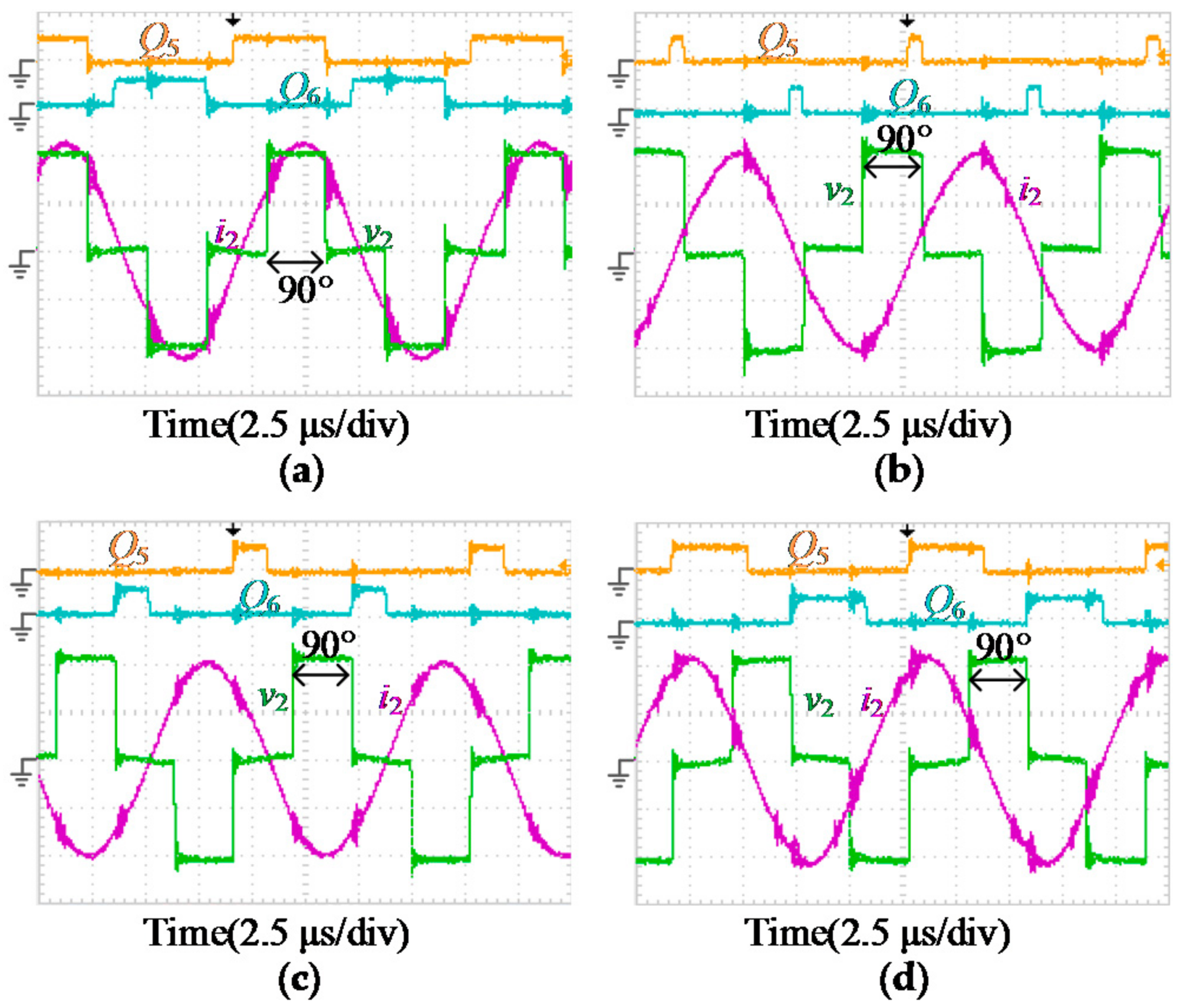
4.2. Dead-Time Elimination
4.3. Comparisons and Discussions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kim, T.-H.; Yoon, S.; Yook, J.-G.; Yun, G.-H.; Lee, W.Y. Evaluation of power transfer efficiency with ferrite sheets in WPT system. In Proceedings of the 2017 IEEE Wireless Power Transfer Conference (WPTC), Taipei, Taiwan, 10–12 May 2017. [Google Scholar]
- Kim, T.-H.; Yun, G.-H.; Lee, W.Y.; Yook, J.-G. Asymmetric Coil Structures for Highly Efficient Wireless Power Transfer Systems. IEEE Trans. Microw. Theory Technol. 2018. [Google Scholar] [CrossRef]
- Tsiropoulou, E.E.; Mitsis, G.; Papavassiliou, S. Interest-aware Energy Collection & Resource Management in Machine to Machine Communications. Ad Hoc Netw. 2018, 68, 48–57. [Google Scholar]
- Vamvakas, P.; Tsiropoulou, E.E.; Vomvas, M.; Papavassiliou, S. Adaptive Power Management in Wireless Powered Communication Networks: A User-Centric Approach. In Proceedings of the 38th IEEE Sarnoff Symposium, Newark, NJ, USA, 8–20 Septemner 2017. [Google Scholar]
- Bashirullah, R. Wireless implants. IEEE Microw. Mag. 2010, 11, S14–S23. [Google Scholar] [CrossRef]
- Lu, Y.; Ma, D.B. Wireless Power Transfer System Architectures for Portable or Implantable Applications. Energies 2016, 9, 1087. [Google Scholar] [CrossRef]
- Wang, Z.; Wei, X.; Dai, H. Design and Control of a 3 kW Wireless Power Transfer System for Electric Vehicles. Energies 2016, 9, 10. [Google Scholar] [CrossRef]
- Lee, S.-H.; Kim, J.-H.; Lee, J.-H. Development of a 60 kHz, 180 kW, Over 85% Efficiency Inductive Power Transfer System for a Tram. Energies 2016, 9, 1075. [Google Scholar] [CrossRef]
- Cochran, S.; Quaiyum, F.; Fathy, A.; Cosniett, D.; Yang, S. A GaN-based Synchronous Rectifier for WPT Receivers with Reduced THD. In Proceedings of the 2016 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Knoxville, TN, USA, 4–6 October 2016; pp. 81–87. [Google Scholar]
- Diekhans, T.; De Doncker, R.W. A dual-side controlled inductive power transfer system optimized for large coupling factor variations and partial load. IEEE Trans. Power Electron. 2015, 30, 6320–6328. [Google Scholar] [CrossRef]
- Berger, A.; Agostinelli, M.; Vesti, S.; Oliver, J.A.; Cobos, J.A.; Huemer, M. Phase-shift and amplitude control for an active rectifier to maximize the efficiency and extracted power of a wireless power transfer system. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 1620–1624. [Google Scholar]
- Berger, A.; Agostinelli, M.; Vesti, S.; Oliver, J.A.; Cobos, J.A.; Huemer, M. A Wireless Charging System Applying Phase-Shift and Amplitude Control to Maximize Efficiency and Extractable Power. IEEE Trans. Power Electron. 2015, 30, 6338–6348. [Google Scholar] [CrossRef]
- Mai, R.; Liu, Y.; Li, Y.; Yue, P.; Cao, G.; He, Z. An Active Rectifier Based Maximum Efficiency Tracking Method Using an Additional Measurement Coil for Wireless Power Transfer. IEEE Trans. Power Electron. 2017, 33, 716–728. [Google Scholar] [CrossRef]
- Liu, X.; Wang, T.; Yang, X.; Jin, N.; Tang, H. Analysis and Design of a Wireless Power Transfer System with Dual Active Bridges. Energies 2017, 10, 1588. [Google Scholar] [CrossRef]
- Bac, X.N.; Vilathgamuwa, D.M.; Foo, G.H.B.; Wang, P.; Ong, A.; Madawala, U.K.; Trong, D.N. An Efficiency Optimization Scheme for Bidirectional Inductive Power Transfer Systems. IEEE Trans. Power Electron. 2015, 30, 6310–6319. [Google Scholar]
- Thrimawithana, D.J.; Madawala, U.K.; Neath, M. A Synchronization Technique for Bidirectional IPT Systems. IEEE Trans. Ind. Electron. 2013, 60, 301–309. [Google Scholar] [CrossRef]
- Tang, Y.; Chen, Y.; Madawala, U.K.; Thrimawithana, D.J.; Ma, H. A New Controller for Bi-directional Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2017. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, F.; Costinett, D.J.; Tolbert, L.M. Dead-time optimization of SiC devices for voltage source converter. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 1145–1152. [Google Scholar]
- Zhang, X.; Lai, Z.; Xiong, R.; Li, Z.; Zhang, Z.; Song, L. Switching Device Dead Time Optimization of Resonant Double-Sided LCC Wireless Charging System for Electric Vehicles. Energies 2017, 10, 1772. [Google Scholar] [CrossRef]
- Attaianese, C.; Nardi, V.; Tomasso, G. A novel SVM strategy for VSI dead-time-effect reduction. IEEE Trans. Ind. Appl. 2015, 41, 1667–1674. [Google Scholar] [CrossRef]
- Choi, J.S.; Yoo, J.Y.; Lim, S.W.; Kim, Y.S. A novel dead time minimization algorithm of the PWM inverter. In Proceedings of the 1999 IEEE Industry Applications Conference (Thirty-Forth IAS Annual Meeting), Phoenix, AZ, USA, 3–7 October 1999; Volume 4, pp. 2188–2193. [Google Scholar]
- Urasaki, N.; Senjyu, T.; Uezato, K.; Funabashi, T. An adaptive dead-time compensation strategy for voltage source inverter fed motor drives. IEEE Trans. Power Electron. 2005, 20, 1150–1160. [Google Scholar] [CrossRef]
- Patel, P.J.; Patel, V.; Tekwani, P.N. Pulse-based dead-time compensation method for self-balancing space vector pulse width-modulated scheme used in a three-level inverter-fed induction motor drive. IET Power Electron. 2011, 4, 624–631. [Google Scholar] [CrossRef]
- Chen, L.; Peng, F.Z. Dead-time elimination for voltage source inverters. IEEE Trans. Power Electron. 2008, 23, 574–580. [Google Scholar] [CrossRef]
- Wang, Y.; Gao, Q.; Cai, X. Mixed PWM for Dead-Time Elimination and Compensation in a Grid-Tied Inverter. IEEE Trans. Ind. Electron. 2011, 58, 4797–4803. [Google Scholar] [CrossRef]
- Lin, Y.K.; Lai, Y.S. Dead-time elimination of PWM-controlled inverter/converter without separate power sources for current polarity detection circuit. IEEE Trans. Ind. Electron. 2009, 56, 2121–2127. [Google Scholar]
- Yin, S.; Tseng, K.J.; Tong, C.F.; Simanjorang, R.; Gajanayake, C.J.; Gupta, A.K. A 99% efficiency SiC three-phase inverter using synchronous rectification. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016; pp. 2942–2949. [Google Scholar]
- Yin, S.; Liu, Y.; Liu, Y.; Tseng, K.J.; Pou, J.; Simanjorang, R. Comparison of SiC Voltage Source Inverters Using Synchronous Rectification and Freewheeling Diode. IEEE Trans. Power Electron. 2018, 65, 1051–1061. [Google Scholar] [CrossRef]
- Cree Inc. KIT8020CRD8FF1217P-1 CREE Silicon Carbide MOSFET Evaluation Kit User’s Manual; Cree Inc.: Durham, NC, USA, 2014. [Google Scholar]
- Ahn, D.; Kim, S.; Moon, J.; Cho, I.K. Wireless Power Transfer with Automatic Feedback Control of Load Resistance Transformation. IEEE Trans. Power Electron. 2016, 31, 7876–7886. [Google Scholar] [CrossRef]
- Li, H.; Li, J.; Wang, K.; Chen, W.; Yang, X. A maximum efficiency point tracking control scheme for wireless power transfer systems using magnetic resonant coupling. IEEE Trans. Power Electron. 2015, 30, 3998–4008. [Google Scholar] [CrossRef]
- J2954™ NOV2017, SAE J2954. 2017. Available online: https://saemobilus.sae.org/content/J2954_201711 (accessed on 14 June 2018).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| V1,dc | primary DC voltage | 100 V |
| V2,dc | secondary DC voltage | 100 V |
| L1 | transmitter coil inductance | 61 μH |
| C1 | transmitter compensation capacitance | 0.05 μF |
| L2 | receiver coil inductance | 61 μH |
| C2 | receiver compensation capacitance | 0.05 μF |
| f | inverter frequency | 90 kHz |
| d | the air gap between the coils | 10 cm |
| M | mutual inductance | 14 μH |
| PWM Modes | Regions | Δβ | Δφ |
|---|---|---|---|
| Conventional PWM mode | Region 1 | −8.1° | −8.1° |
| Region 2 | −8.1° | −8.1° | |
| Region 3 | 0° | 0° | |
| Region 4 | 2.5° | −2.5° | |
| Region 5 | 8.1° | −8.1° | |
| Region 6 | 6.6° | −9.6° | |
| Region 7 | 0° | −16.2° | |
| Region 8 | −8.1° | −8.1° | |
| Proposed PWM mode | Region 1 | 0° | 0° |
| Region 2 | 0° | 0° | |
| Region 3 | 0° | 0° | |
| Region 4 | 0° | 0° |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Wang, T.; Jin, N.; Habib, S.; Ali, M.; Yang, X.; Tang, H. Analysis and Elimination of Dead-Time Effect in Wireless Power Transfer System. Energies 2018, 11, 1577. https://doi.org/10.3390/en11061577
Liu X, Wang T, Jin N, Habib S, Ali M, Yang X, Tang H. Analysis and Elimination of Dead-Time Effect in Wireless Power Transfer System. Energies. 2018; 11(6):1577. https://doi.org/10.3390/en11061577
Chicago/Turabian StyleLiu, Xin, Tianfeng Wang, Nan Jin, Salman Habib, Muhammad Ali, Xijun Yang, and Houjun Tang. 2018. "Analysis and Elimination of Dead-Time Effect in Wireless Power Transfer System" Energies 11, no. 6: 1577. https://doi.org/10.3390/en11061577