Integrated Full-Frequency Impedance Modeling and Stability Analysis of the Train-Network Power Supply System for High-Speed Railways


Abstract
:1. Introduction
- Harmonic Resonance
- Harmonic Instability
- Low-Frequency Oscillation (LFO)
2. Integrated Full-Frequency Impedance Model of Train-Network
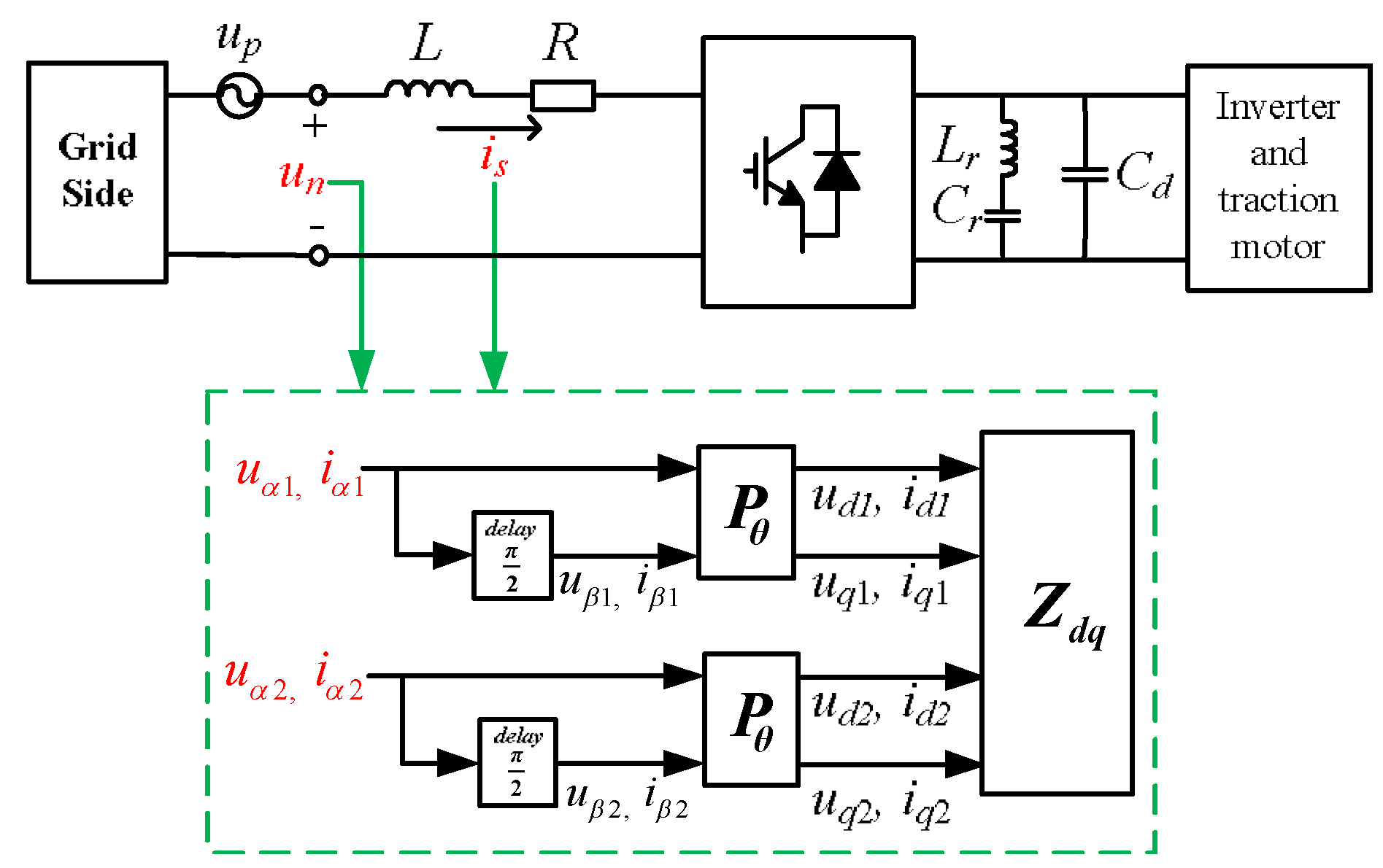
2.1. Input Impedance Model of Train
2.1.1. Impedance Model of the Grid-Side Converter
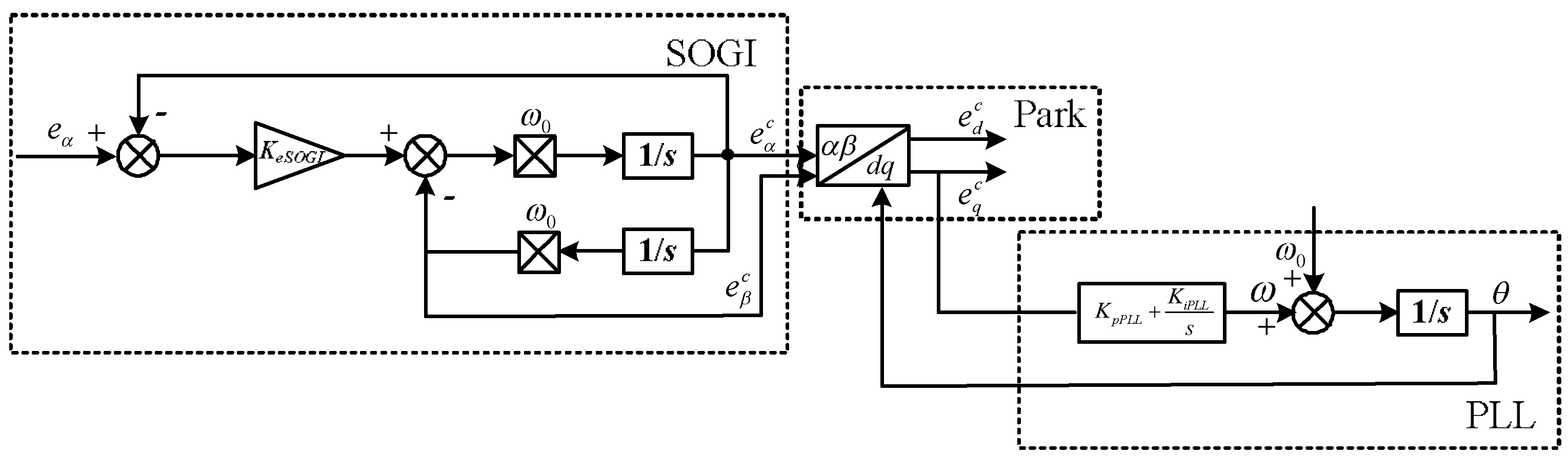
A. Model of Voltage Synchronization System (VSS)
B. Model of Current Synchronization System (CSS)
C. Model of AC Current Controller (ACC)
D. Model of DC Voltage Controller (DVC)
2.1.2. Impedance Model of Inverter and Traction Motor
2.2. Output Impedance Model of Traction Network
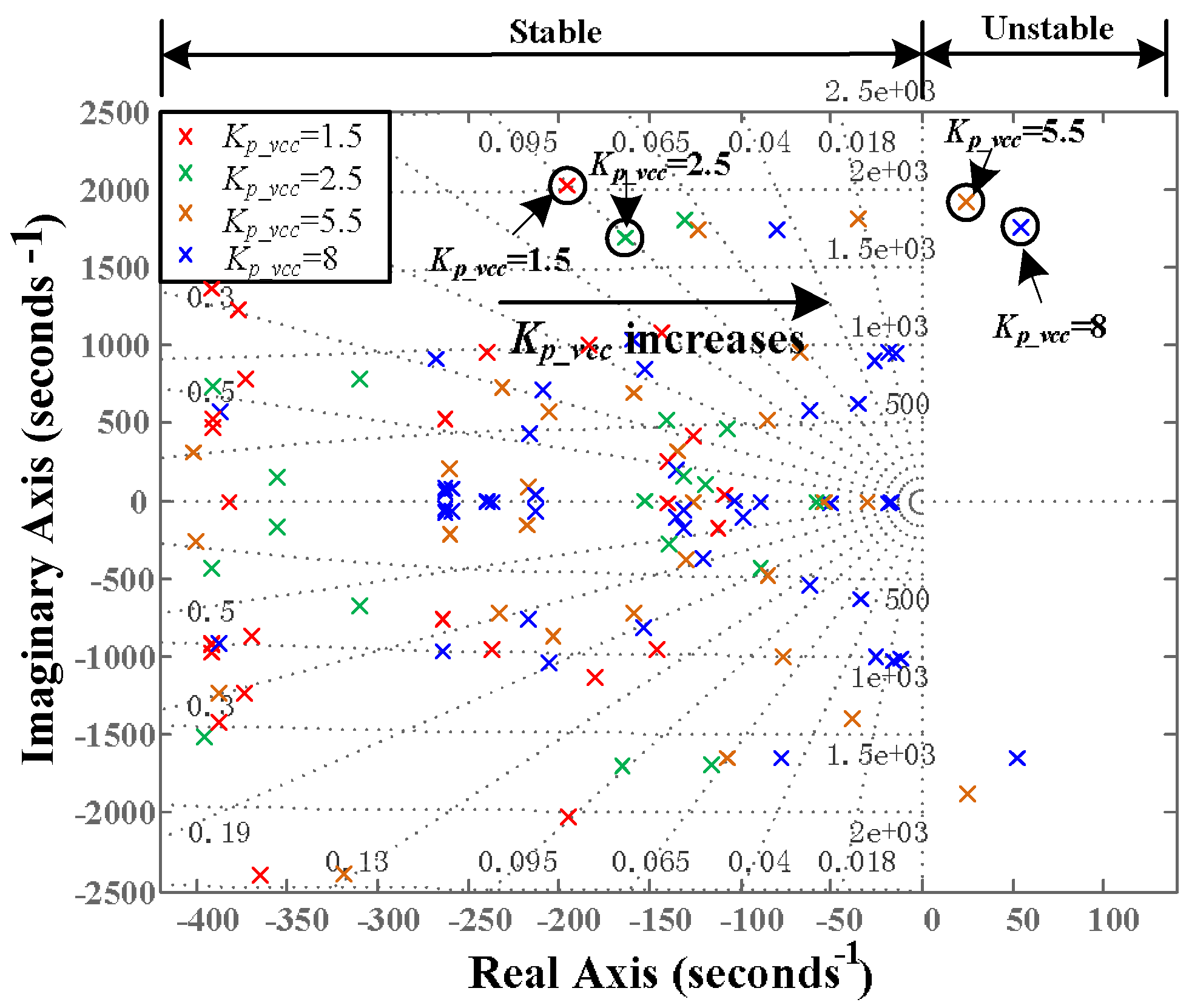
3. Stability Analysis of the Overall Power System
4. Simulation and Experiment Result
4.1. Setup of Simulation and Experiment
4.2. Simulation and Experiment Analysis
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Liu, Z.; Zhang, G.; Liao, Y. Stability research of high-speed railway EMUs and traction network cascade system considering impedance matching. IEEE Trans. Ind. Appl. 2016, 52, 4315–4326. [Google Scholar] [CrossRef]
- Cui, H.; Song, W.; Ge, X.; Feng, X. High-frequency resonance suppression of high-speed railways in China. IET Electr. Syst. Transp. 2016, 6, 88–95. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodriguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Harnefors, L.; Yepes, A.G.; Vidal, A.; Doval-Gandoy, J. Passivity-based controller design of grid-connected VSCs for prevention of electrical resonance instability. IEEE Trans. Ind. Electron. 2015, 62, 702–710. [Google Scholar] [CrossRef]
- Hu, H.; Tao, H.; Wang, X.; Blaabjerg, F.; He, Z.; Gao, S. Train–Network Interactions and Stability Evaluation in High-Speed Railways—Part II: Influential Factors and Verifications. IEEE Trans. Power Electron. 2018, 33, 4643–4659. [Google Scholar] [CrossRef]
- Mollerstedt, E.; Bernhardsson, B. Out of control because of harmonics—An analysis of the harmonic response of an inverter locomotive. IEEE Control Syst. 2000, 20, 70–81. [Google Scholar] [CrossRef]
- Hu, H.; Shao, Y.; Tang, L.; Ma, J.; He, Z.; Gao, S. Overview of harmonic and resonance in railway electrification systems. IEEE Trans. Ind. Appl. 2018. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, Z.; Yao, S.; Liao, Y.; Xiao, C. Suppression of low-frequency oscillation in traction network of high-speed railway based on auto-disturbance rejection control. IEEE Trans. Transp. Electr. 2016, 2, 244–255. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, G.; Liao, Y. The stability research of high-speed railway EMUs and traction network cascade system. In Proceedings of the Electrical Machines & Power Electronics (ACEMP), Side, Turkey, 2–4 September 2015; pp. 123–128. [Google Scholar]
- Cui, H.; Feng, X.; Song, W. High-Order Harmonic Load Modeling Method for High-Speed Railway. Electr. Power Autom. Equip. 2013, 33, 92–99. (In Chinese) [Google Scholar]
- Wang, H.; Wu, M.; Sun, J. Analysis of low-frequency oscillation in electric railways based on small-signal modeling of vehicle-grid system in dq frame. IEEE Trans. Power Electron. 2015, 30, 5318–5330. [Google Scholar] [CrossRef]
- Liao, Y.; Liu, Z.; Zhang, G.; Xiang, C. Vehicle-grid system stability analysis considering impedance specification based on norm criterion. In Proceedings of the Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Busan, Korea, 1–4 June 2016; pp. 118–123. [Google Scholar]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Analysis of DQ small-signal impedance of grid-tied inverters. IEEE Trans. Power Electron. 2016, 31, 675–687. [Google Scholar] [CrossRef]
- Harnefors, L.; Bongiorno, M.; Lundberg, S. Input-admittance calculation and shaping for controlled voltage-source converters. IEEE Trans. Ind. Electron. 2007, 54, 3323–3334. [Google Scholar] [CrossRef]
- Danielsen, S.; Fosso, O.B.; Molinas, M.; Suul, J.A.; Toftevaag, T. Simplified models of a single-phase power electronic inverter for railway power system stability analysis—Development and evaluation. Electr. Power Syst. Res. 2010, 80, 204–214. [Google Scholar] [CrossRef]
- Hu, H.; Tao, H.; Blaabjerg, F.; Wang, X.; He, Z.; Gao, S. Train–Network Interactions and Stability Evaluation in High-Speed Railways—Part I: Phenomena and Modeling. IEEE Trans. Power Electron. 2018, 33, 4627–4642. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, X.; Blaabjerg, F. Analysis of phase-locked loop influence on the stability of single-phase grid-connected inverter. In Proceedings of the Power Electronics for Distributed Generation Systems (PEDG), Aachen, Germany, 22–25 June 2015; pp. 1–8. [Google Scholar]
- Tao, H.; Hu, H.; Wang, X.; Blaabjerg, F.; He, Z. Impedance-Based Harmonic Instability Assessment in Multiple Electric Trains and Traction Network Interaction System. IEEE Trans. Ind. Appl. 2018. [Google Scholar] [CrossRef]
- Wen, W. Dynamic Characteristic and Control of Power Electronic Cascade Systems. Power Convers. 2006, 28, 13–16. (In Chinese) [Google Scholar]
- Hu, H.; Zhang, M.; Qian, C.; He, Z.; Fang, L. Research on the harmonic transmission characteristic and the harmonic amplification and suppression in high-speed traction system. In Proceedings of the Power and Energy Engineering Conference (APPEEC), Wuhan, China, 25–28 March 2011; pp. 1–4. [Google Scholar]
- Cui, H.; Song, W.; Fang, H.; Ge, X.; Feng, X. Resonant harmonic elimination pulse width modulation-based high-frequency resonance suppression of high-speed railways. IEEE Trans. Power Electron. 2015, 8, 735–742. [Google Scholar] [CrossRef]
- Liao, Y.; Liu, Z.; Zhang, G.; Xiang, C. Vehicle-Grid System Modeling and Stability Analysis with Forbidden Region-Based Criterion. IEEE Trans. Power Electron. 2017, 32, 3499–3512. [Google Scholar] [CrossRef]
- Hosoe, S. On a time-domain characterization of the numerator polynomials of the Smith McMillan form. IEEE Trans. Autom. Control 1975, 20, 799–800. [Google Scholar] [CrossRef]
- Liao, Y.; Liu, Z.; Zhang, H.; Wen, B. Low-Frequency Stability Analysis of Single-Phase System with dq-Frame Impedance Approach—Part II: Stability and Frequency Analysis. IEEE Trans. Ind. Appl. 2018. [Google Scholar] [CrossRef]
- Liao, Y.; Liu, Z.; Hu, X.; Wen, B. A dq-Frame Impedance Measurement Method based on Hilbert Transform for Single-Phase Vehicle-Grid System. In Proceedings of the Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Harbin, China, 7–10 August 2017; pp. 1–6. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Note | Simulation Value | Experiment Value |
|---|---|---|---|
| ed0 | d-channel steady state voltage | 2000 V | 2100 V |
| eq0 | q-channel steady state voltage | 0 V | 0 V |
| P0 | Active power | 360 kW | 360 kW |
| Q0 | Reactive power | 0 kW | 0 kW |
| L | Leakage inductance of transformer | 2.8 mH | 2.8 mH |
| R | Leakage resistance of transformer | 0.2 Ω | 0.35 Ω |
| Td | Time delay | 1.2 μs | 1.2 μs |
| Kp_acc | Current loop proportional gain | 3 | 4.5 |
| Ki_acc | Current loop integral gain | 0.8 | 0.8 |
| Kp_vcc | Voltage loop proportional gain | 1.5 | 1.5 |
| Ki_vcc | Voltage loop integral gain | 1.4 | 1.5 |
| Kp_PLL | PLL-Proportional gain | 5.5 | 6 |
| Ki_PLL | PLL-Integral gain | 97 | 50 |
| KeSOGI | SOGI-voltage gain | 0.8 | 0.8 |
| KiSOGI | SOGI-current gain | 1 | 1 |
| Cdc | Capacitance in DC side | 16 mF | 16 mF |
| vdc0 | DC voltage | 1500 V | 1500 V |
| Lm | Inductance of motor | 43.8 mH | 43.8 mH |
| Rm | Resistance of motor | 0.223 Ω | 0.223 Ω |
| we | Rotating speed | 1000 rad/s | 1000 rad/s |
| n | n modules | 2 | 2 |
| R0 | Unit length residence of network | 1.33 mΩ/km | - |
| L0 | Unit length inductance of network | 0.21 mH/km | - |
| G0 | Unit length conductance of network | 2 S/km | - |
| C0 | Unit length capacitance of network | 0.35 mF/km | - |
| l | Length of catenary | 15 km | - |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Wang, L.; Dunford, W.; Chen, J.; Liu, Z. Integrated Full-Frequency Impedance Modeling and Stability Analysis of the Train-Network Power Supply System for High-Speed Railways. Energies 2018, 11, 1714. https://doi.org/10.3390/en11071714
Zhang X, Wang L, Dunford W, Chen J, Liu Z. Integrated Full-Frequency Impedance Modeling and Stability Analysis of the Train-Network Power Supply System for High-Speed Railways. Energies. 2018; 11(7):1714. https://doi.org/10.3390/en11071714
Chicago/Turabian StyleZhang, Xinyu, Lei Wang, William Dunford, Jie Chen, and Zhigang Liu. 2018. "Integrated Full-Frequency Impedance Modeling and Stability Analysis of the Train-Network Power Supply System for High-Speed Railways" Energies 11, no. 7: 1714. https://doi.org/10.3390/en11071714