1. Introduction
Non-linear loads connected to the power system have led to increased harmonic levels, and these harmonics result in serious problems related to the power system operation such as voltage distortion, increased losses and heating [
1,
2,
3,
4]. Hence, due to the significantly increasing use of power electronic devices, power quality has become an important issue in the power system operation. Power system harmonics are one of the important indices of the quality of power, and thus, it is necessary to estimate the power system harmonic components to provide high-quality of power [
5,
6,
7,
8].
In many power system applications, fast Fourier transform (FFT) and discrete Fourier transform (DFT) have been extensively used to estimate the harmonic components of voltage or current signals owing to its fast computation and simplicity [
9,
10,
11,
12]. Both techniques give an exact estimation of the harmonic components for the stationary noiseless signals. However, FFT and DFT do not consider the noise in their derivations and are suitable for a stationary signal, these techniques may lose accuracy and have poor performance for the non-stationary and noisy signals.
In order to suppress the noise and deal with the time varying harmonics, the Kalman filter-based approaches have been suggested with state space representation of the noisy signal [
13,
14,
15]. In these approaches, the harmonic components are represented as state variables and are estimated from the Kalman filter. Since the Kalman filter gives the optimal estimation result, these techniques are considered as effective methods for estimating the time varying harmonics of the power system. However, these methods essentially require the prior information of the system and signals such as initial harmonic components and stochastic information of the variance of harmonics and the measurement noise. However, it is hard to acquire their information reliably. Especially, the optimality of the Kalman filter depends on the accuracy of the process and measurement noise covariance matrices. Small values of the process and measurement noise covariance matrices yield unreliable estimates, and large values could produce the divergence of the estimation result. Thus, Kalman filter-based approaches may have poor performance or even diverge with these uncertainties. In the state space representation of the noisy signal, the variance of harmonic components is assumed as a random walk motion and is considered as the process noise with an unknown noise covariance matrix. In real cases, it is very hard to acquire the exact information of the variance of harmonic components. To this end, the selection of the process and measurement noise covariance matrices is a critical issue for the use of the Kalman filter. In order to solve these problems, modified Kalman filter-based harmonics estimation techniques have been proposed [
2,
4,
8,
16,
17,
18,
19,
20,
21,
22,
23]. In [
16], it was demonstrated that the estimation result depends more on the ratio of the process and measurement noise covariance matrices than on each of their values. The use of two process noise covariance matrices for dynamic harmonic tracking estimation was proposed in [
17]. In [
19], a method for self-tuning of the model error covariance was presented to track harmonic fluctuations. The adaptive Kalman filter-based methods were proposed in [
17,
18,
22,
23]. In [
18], the adaptive Kalman filter that switches between two basic process noise covariance matrices’ model for steady-state and transient estimation was applied for the dynamic harmonic state estimation and harmonic injection tracking. A method for adaptive tuning of the process and measurement noise covariance matrices was proposed in [
23].
However, since the Kalman filter is the infinite impulse response (IIR) structured filter, which makes use of all information from the initial time to the current time and has an internal state, undesirable uncertainties can accumulate in the states. If the error dynamics of the Kalman filter is marginally stable, small errors can be the cause of the divergence problem. Thus, the estimated harmonics of Kalman filter-based approaches may diverge for the systems with modeling errors or numerical errors. Moreover, it takes a long time to get back to a real state even if temporary undesirable errors disappear. Therefore, the robust estimation method for power system harmonics is required to overcome the demerits of the Kalman filter-based harmonic estimation method. In the signal processing area, the receding horizon or moving horizon estimators with a finite impulse response (FIR) structure have been proposed as an alternative to the IIR-structured estimators such as the Kalman filter [
24,
25,
26,
27,
28]. Since the FIR-structured filters use the recent finite information, they guarantee bounded input bounded output (BIBO) stability and have more robustness and a faster response than IIR-structured filters. Moreover, FIR estimators are less sensitive to the process noise than IIR estimators [
25]. Hence, the FIR filter could be employed for the robust estimation of power system harmonics instead of using the Kalman filter.
In this paper, we propose the robust estimation method for power system harmonics using the optimal FIR filter. The noisy current or voltage signal is represented as a state space model, the harmonic components of signal are represented as state variables, and then, an optimal FIR filter is applied to estimate the magnitude and phase-angle of harmonic components. The contribution of this paper is as follows:
Since the optimal FIR filter used in the proposed method consists of the linear combination of a finite number of past measurements without feedback information, the stability of the proposed method is guaranteed in the sense of bounded input and bounded output (BIBO) stability. Thus, the proposed method can avoid the divergence problem that may arise in the case of Kalman filter-based approaches.
The proposed method can give more robustness than Kalman filter-based approaches with respect to the uncertainties, because the optimal FIR filter is less sensitive to the process noise than an IIR-structured filter, such as the Kalman filter.
The proposed method makes estimation more robust to temporary uncertainties and numerical errors compared with Kalman filter-based methods.
Since the optimal FIR filter used in this approach does not need any a priori information of the initial state [
27], the proposed harmonic estimation method can prevent errors that come from the unknown initial state.
Since the optimal FIR filter used in the proposed method is designed to have a deadbeat property, the proposed method could provide a fast tracking ability.
Since the optimal FIR filter in the proposed method is a time-invariant filter, the proposed method can provide better computational efficiency than the Kalman filter-based approaches, which use the time-varying Kalman filter.
This paper is organized as follows: In
Section 2, state space models for noisy current or voltage signals and the robust estimation method for power system harmonics are proposed by using the optimal FIR filter. In
Section 3, the performances of the proposed scheme and the Kalman filter-based approaches are compared with the signal that has the time-invariant and time-varying harmonic components. In
Section 4, the proposed method will be employed in the power conditioning system to estimate the harmonic components and total harmonic distortions. Finally, the conclusion is presented in
Section 5.
2. Robust Estimation of Power System Harmonics Using an Optimal FIR Filter
A current or voltage signal that includes harmonic components can be represented with measurement noise as:
where
m is the harmonic order and
and
are the magnitude and phase-angle of the
m-th harmonic component at time
t, respectively.
is the fundamental power system frequency, and
is the measurement noise, which is a zero-mean white Gaussian random process with the covariance
.
Let the sampling time interval be
and the time index
k be the
k-th sampling time (
), then the signal can be expressed at time
k as:
The signal (
2) can be represented as a linear time-invariant state space model as follows.
If it is assumed that the variance of the magnitude of the
m-th harmonic components
follows a random walk motion, then the magnitude of the
m-th harmonic components at time
can be represented as:
Let the state variables
be:
then, the signal (
2) at time
can be represented as:
where
. Additionally,
where
.
From (
4)–(
6), the time-invariant state space model for Signal (2) can be represented as:
where:
where
in (
9) means the block diagonal matrix composed of its parameters and
assumed as the white Gaussian random process noise with time-varying covariance
.
Since the increments of the harmonic components
in (
3) is unknown and time-varying,
and its covariance
in (
7) are also unknown and time-varying variables. Therefore, the state estimator for the system (
7) and (
8) should be robust to the unknown process noise. The FIR filter is less sensitive for process noise than the Kalman filter; hence, the FIR filter-based method for power system harmonic estimation may give a more robust solution than the Kalman filter-based method.
In order to design the optimal FIR filter, consider the following state space model:
where
is the state vector,
is the measurement and
and
are the process noise and measurement noise, respectively.
and
are white Gaussian random noises with covariance
Q and
R, respectively.
The optimal FIR filter can be designed as a linear function of finite measurements on the horizon
:
where
L is the optimal filter gain, which is given by:
and
is the finite number of measurements on the horizon as:
For the state space model (
11) and (
12), the optimal filter gain
L chosen to minimize the estimation error variance with unbiased constraint
is obtained as [
24]:
where:
The optimal gain matrix
L for the state space model (
7) and (
8) can be obtained according to the following correspondences:
,
,
,
, and
.
The estimates of the amplitude and phase-angle of the
m-th harmonic components,
and
, can be obtained from the estimated state
as follows:
3. Performance Evaluation
In this section, some simulations are done to evaluate the performance of the proposed method. Consider the following voltage signal harmonics:
with the nominal system frequency
Hz and the sampling frequency of the data acquisition unit as
kHz (27 samples per cycle).
To illustrate the performance of the proposed method, optimal FIR filter, the 14-state time-varying (TV) Kalman filter and the adaptive Kalman filter are implemented for the state space model (
7) and (
8), and the simulation results are compared.
3.1. Case 1: Time-Invariant Harmonic Components
Firstly, to verify the estimation performance of the proposed algorithm, the proposed method is compared with the TV Kalman filter for the signal that has time-invariant harmonic components. For this simulation scenario,
in (
15) is set as
, the
ratio is set as
and the covariance of measurement noise
R is set as
. The waveform of the test signal is shown in
Figure 1.
The TV Kalman filter used in this simulation is designed as follows:
Time update
- -
- -
Project the error covariance ahead:
Measurement update
- -
- -
Update estimation with measurement:
- -
Update the error covariance:
The simulation parameters are set as follows: the horizon size of the optimal FIR filter N is selected as 14, and the initial state and initial estimation error variance for the TV Kalman filter design are set as and , respectively.
The estimated magnitudes and its root-mean-square (rms) estimation errors of each harmonic components of two approaches are compared in
Figure 2 and
Figure 3 and
Table 1, respectively. As seen in these results, the proposed method and TV Kalman filter-based method provide reliable estimation results.
However, since the optimal FIR filter used in the proposed method is a time-invariant filter, it is expected that the proposed method will have better computational efficiency than the TV Kalman filter-based method. In order to compare the computational efficiency, the average computation times per iteration of the two algorithms are compared in
Table 2.
As we expected, the computation time of the proposed method is about less than that of TV Kalman filter-based method.
3.2. Case 2: Time-Varying Harmonic Components
Secondly, to verify the robustness and tracking performance, we consider the signal with time-varying harmonic components. For this scenario,
in (
15) is set as:
The test signal with time-varying harmonic components is shown in
Figure 4.
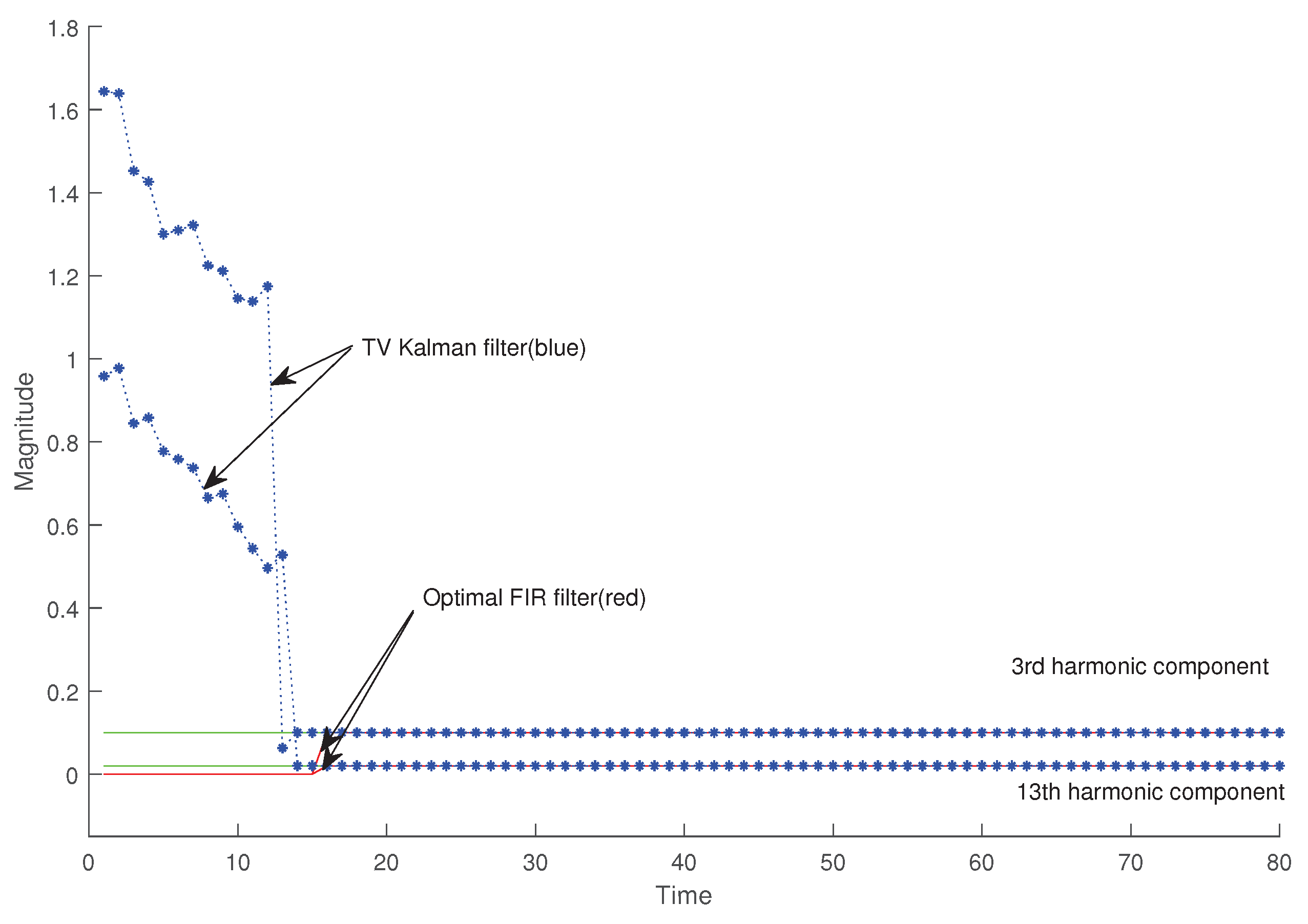
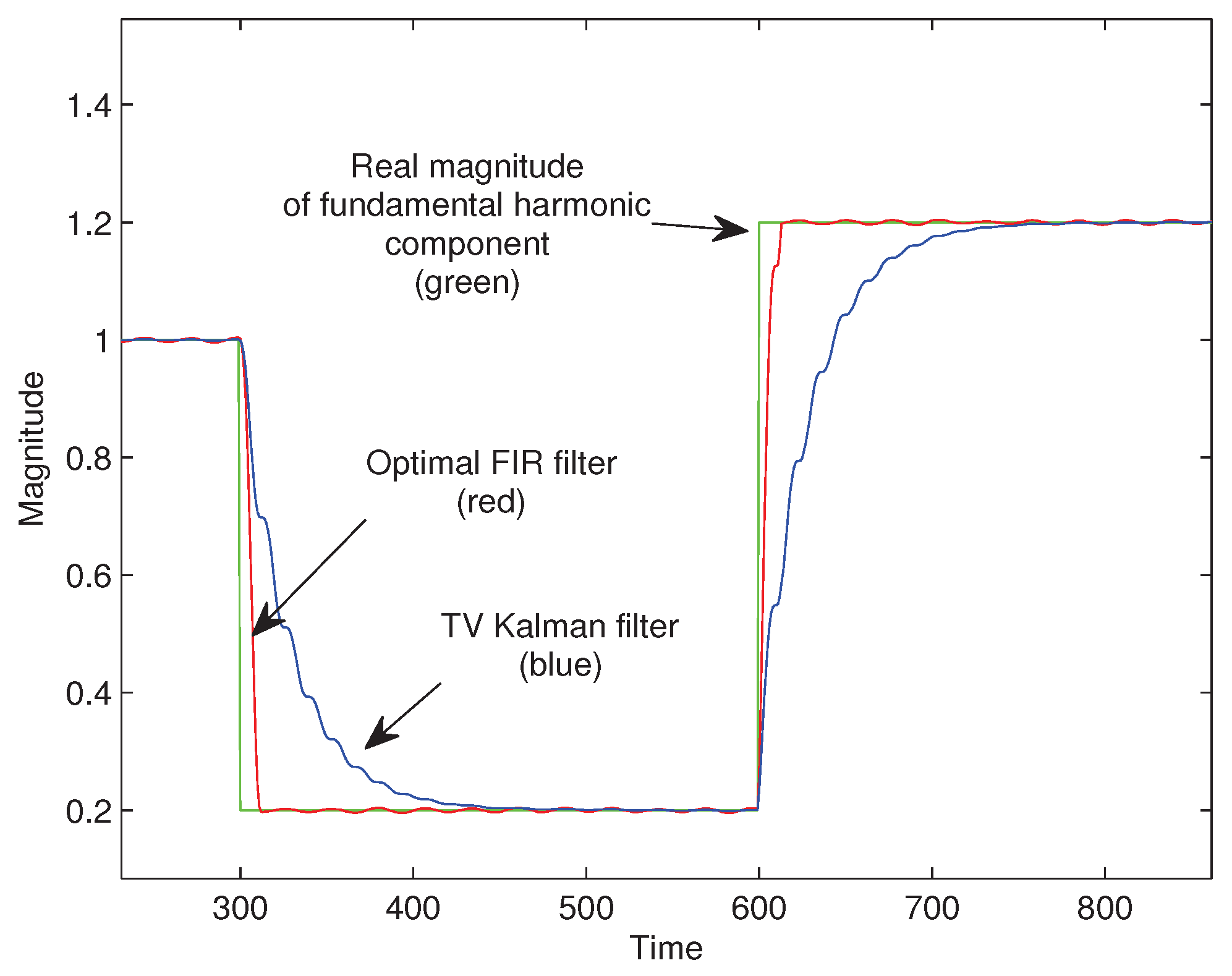
In order to verify the efficiency of the use of FIR-structured filter, the proposed method and TV Kalman filter-based method are compared for the test signal with time-varying harmonic components.
Figure 5,
Figure 6 and
Figure 7 and
Table 3 show the estimated magnitude and its rms estimation errors of the fundamental component with various
ratios (
, constant). As seen in these results, there are no significant changes in the estimate of the proposed method, whereas that of the TV Kalman filter cannot converge to the real magnitude. These results verify that the FIR-structured filter-based method is less sensitive to the covariance matrix
Q. Thus, it can be said that the proposed method is more robust than the Kalman filter-based approach. The oscillatory behavior of two methods in
Figure 5,
Figure 6 and
Figure 7 is due to the measurement noise
and inaccurate process noise covariance matrix
Q.
In addition, the proposed method is compared with the adaptive Kalman filter-based method to verify the robustness and convergence ability. The adaptive Kalman filter has the same structure as the TV Kalman filter, and the process and measurement covariance matrices
Q and
R are tuned each iteration as follows [
23]:
where
is a positive scalar and predictor error
and function
are defined as follows:
To design the adaptive Kalman filter, parameters are set as , , and , respectively. The initial state and initial estimation error variance are set the same as the TV Kalman filter parameters.
The rms estimation errors of the proposed method and the adaptive Kalman filter-based method are shown in
Table 4. From this result, the estimation error of the proposed method is lesser than that of the adaptive Kalman filter-based approach.
Figure 8 and
Figure 9 show the estimated magnitude of harmonic components of the proposed method and the adaptive Kalman filter-based method. As seen in these figures, the estimate of the proposed method converges to the real magnitude of each harmonic component faster than that of the adaptive Kalman filter-based approach. Additionally, it is expected that the computation time of the proposed method will be less than that of adaptive Kalman filter-based approach, because the adaptive Kalman filter needs to calculate
Q and
R per iteration. In
Table 5, the average computation times per iteration of the two algorithms are compared.
As seen in the result, the computation time of the proposed method is 72. less than that of adaptive Kalman filter-based method.
4. Estimation of the Power Conditioning System Harmonic Components
Due to the high efficiency and environmental acceptability, the solid oxide fuel cell (SOFC) is considered as an attractive power source in the distributed generation power system [
29].
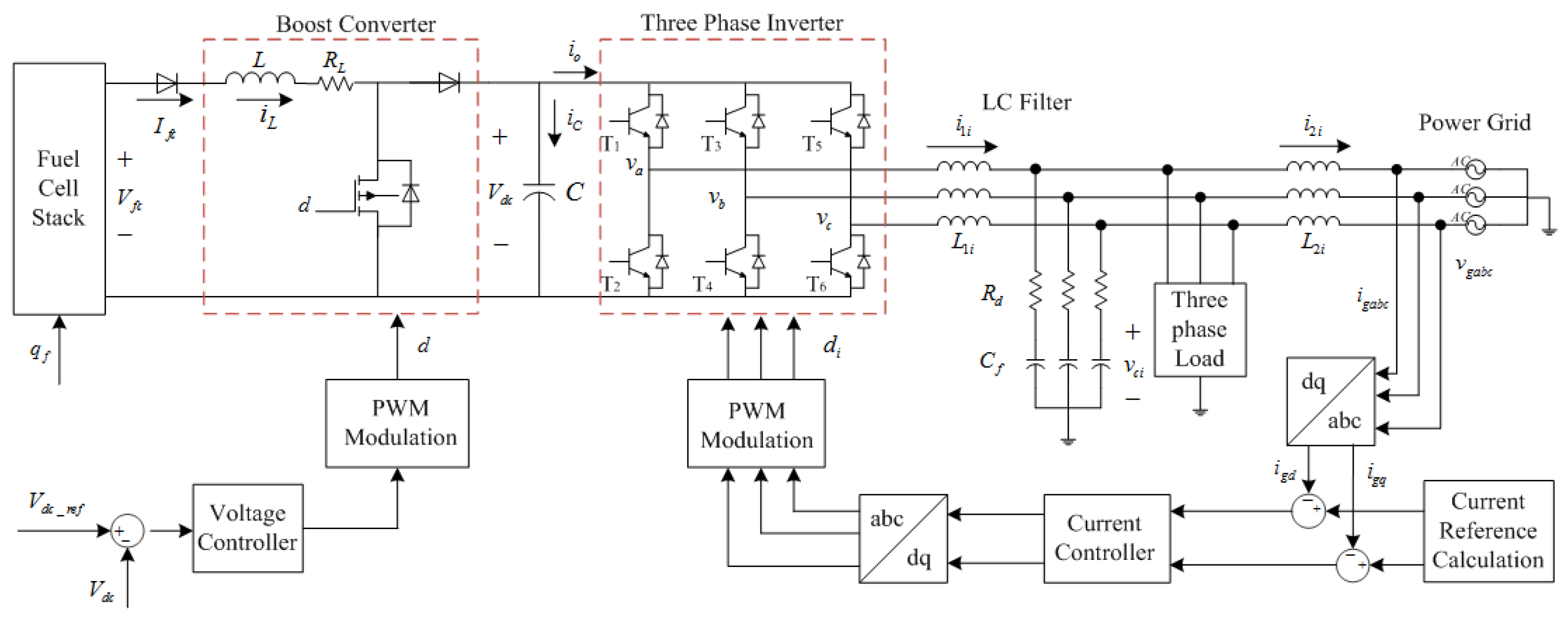
As a flexible and controllable distributed generation source, SOFC is required to fill the power gap to reduce the intervention from and impact to the utility grid. The SOFC is connected to the grid through power electronic converters to improve the system reliability and efficiency. To provide power to the power grid, a power conditioning system (PCS) is required to interface between the SOFC and power grid to convert the DC voltage of SOFC into AC voltage, as shown in
Figure 10. From the configuration of the grid-connected SOFC in
Figure 10, there are two subsystems, which are the SOFC and PCS, respectively. The PCS consists of a DC/DC boost converter and a DC/AC inverter. The DC/DC converter is to boost the output voltage of SOFC to a higher voltage in the DC link, and the DC/AC inverter is to convert DC voltage into AC voltage to supply the power to the load and the power grid. From the point of SOFC, it should not only follow the power demand as quickly as possible, but also keep working safely. However, the power electronic converters are sensitive to grid disturbances. Therefore, it is necessary to design proper control strategies to keep the system stable under any disturbance and parameter variations in the distribution system. The current control strategy is a commonly-used control method in a grid-connected system to control the amount of output power in the DC/AC inverter.
To make sure that a high quality of the current is provided to the load and the power grid side, it is important to measure the total effect of harmonic components. The total harmonic distortions (THDs) can give the information of the harmonic components in the current signal. THDs of the output current of the inverter may exceed the required standard, which is less than 5%. Thus, it is important to have more precise components of harmonics to estimate the THDs, and the proposed algorithm can give a good solution to estimate the harmonic components of the PCS current signal and THDs.
The current signal of PCS (Phase A) is shown in
Figure 11. The sampling frequency of the data acquisition is
kHz, and the white Gaussian random process noises are added to the all measurements with measurement noise covariance
. To design the filters, the measurement noise covariance for the filter is set as 10, the horizon size of the FIR filter
N is set as 21 and the initial state and initial estimation error variance are set as
and
, respectively.
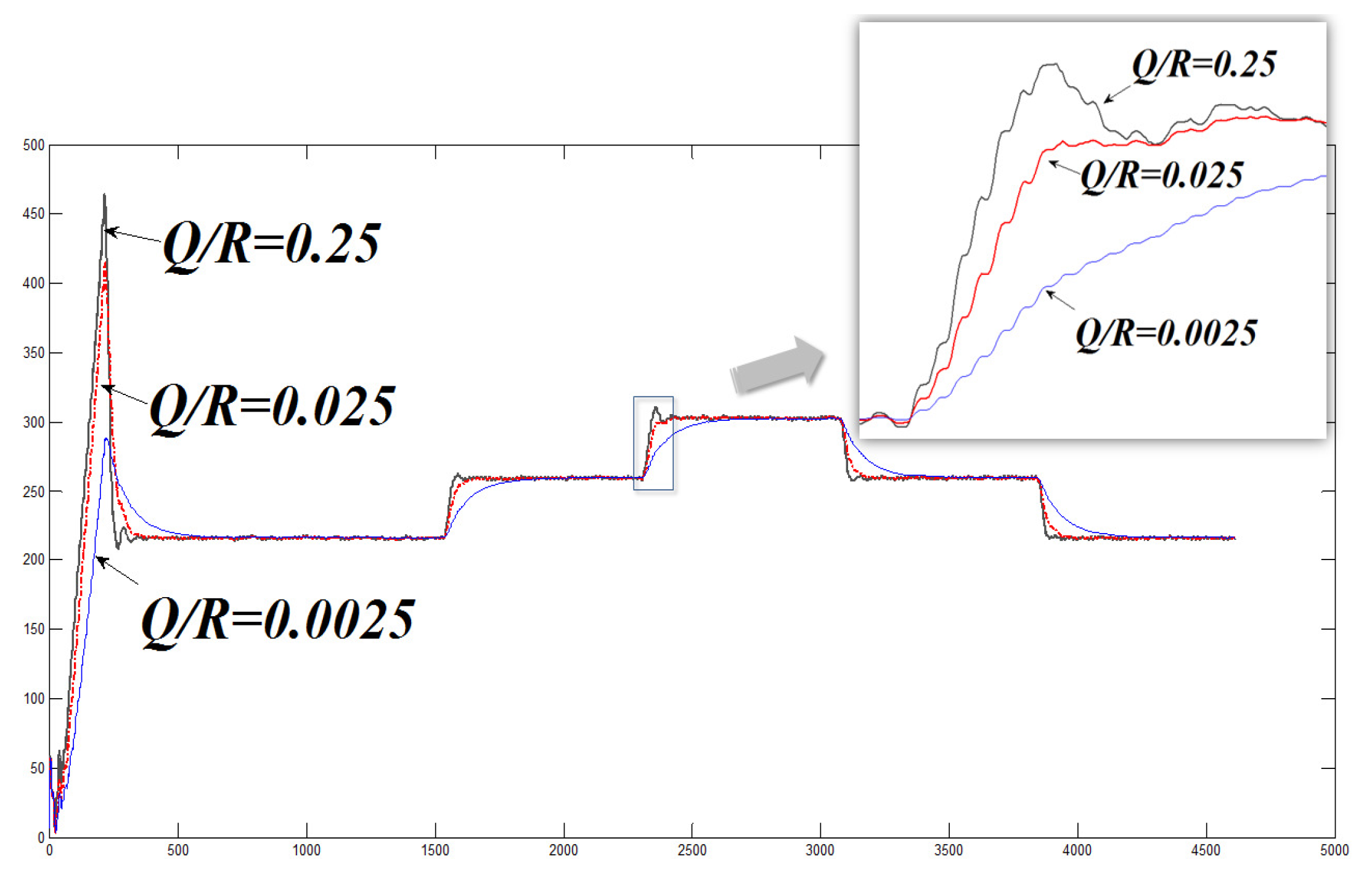
The estimated fundamental magnitudes of the proposed method and TV Kalman filter-based method with various
ratios are shown in
Figure 12 and
Figure 13. As seen in these figures, the proposed method gives a more robust estimate than the TV Kalman filter-based method for PCS harmonic components’ estimation. These results verify the robustness of the proposed method in power system harmonic estimation.
5. Conclusions
In this paper, a robust estimation technique was introduced to estimate the magnitude and phase of the harmonic components of the power system. In order to design the robust estimator, the optimal FIR filter was applied to the state space representation of the noisy current or voltage signals. Since the optimal FIR filter used in the proposed method consisted of a linear combination of a finite number of past measurements, the proposed method could avoid the divergence problem that might arise in the case of Kalman filter-based approaches. The proposed method could provide more robust estimation of uncertainties and numerical errors and a faster tracking ability compared with the Kalman filter-based approaches, because the FIR-structured filter was used to estimate the harmonic components. Since the optimal FIR filter used in this approach is not use any a priori information of the initial state, the proposed harmonic estimation method could prevent errors from the unknown initial state. Moreover, since the optimal FIR filter used in this approach is a time-invariant filter, the proposed method could give better computation efficiency than the Kalman filter-based approaches, which use the time-varying Kalman filter. Through the simulation results, it was shown that the proposed method is much less sensitive for the process noise than the Kalman filter-based approaches. Furthermore, it was verified that the proposed method is more robust and has better tracking performance and computational efficiency than the Kalman filter-based approaches by comparison with the time-varying Kalman filter and the adaptive Kalman filter-based approaches. Moreover, it was shown that the proposed method could be applied to the real power system by employing the proposed method to estimate the harmonic components of PCS.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}