An Energy-Balanced Geographic Routing Algorithm for Mobile Ad Hoc Networks


Abstract
:1. Introduction
2. GPSR
3. EM-GPSR
3.1. SU-GPSR
3.2. Energy-Balanced Model
- The best next-hop node cannot be selected according to geographical location. If the node with the most energy and the least energy is in the same area, the selection may not fall in this region;
- The mobility of nodes is only distinguished by zero and one. Obviously, it cannot reflect the motion characteristics of nodes;
- Although the prediction model of energy consumption is proposed, the energy consumption rate of nodes is not taken into account.
- Energy harvesting is not a common function of mobile ad-hoc network nodes at present. Harvesting devices bring additional cost and the energy harvesting efficiency is not clearly stated.
3.3. Flow of the EM-GPSR Algorithm
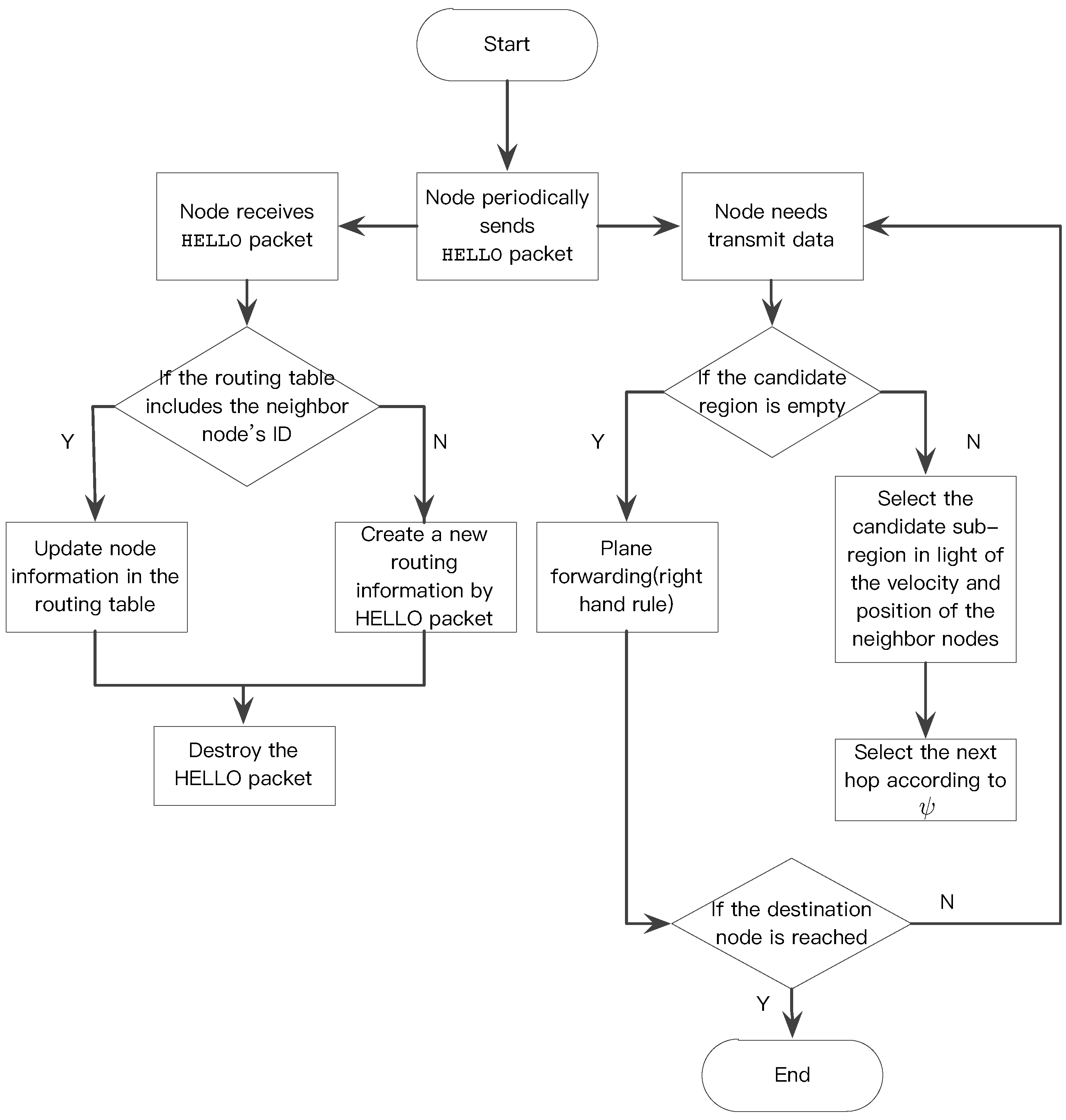
- Step 1: Network initialization, where all nodes periodically send HELLO packets to neighbor nodes.
- Step 2: If node i receives a HELLO packet from a neighbor node, it checks whether the node ID in the HELLO packet already exists in its local memory.
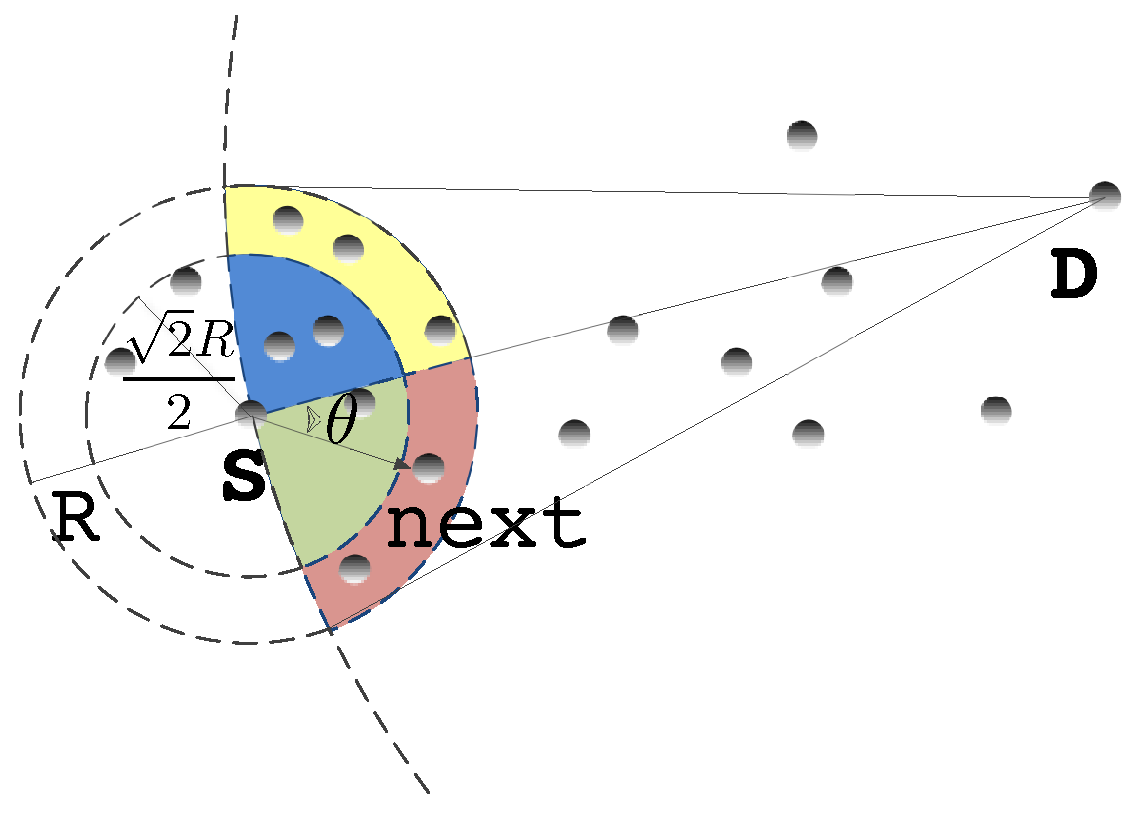
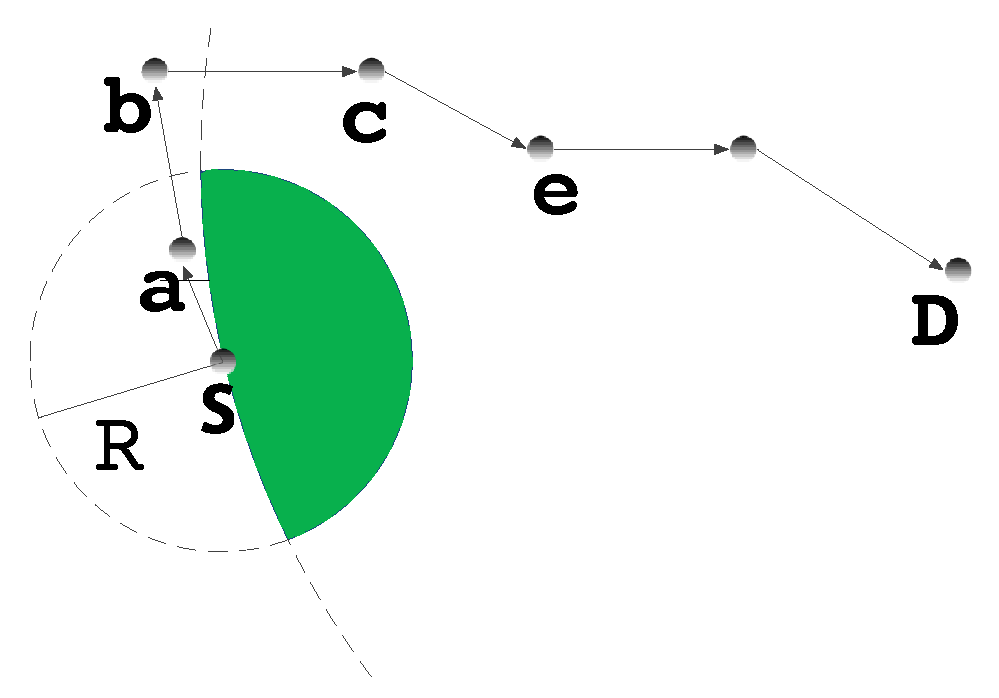
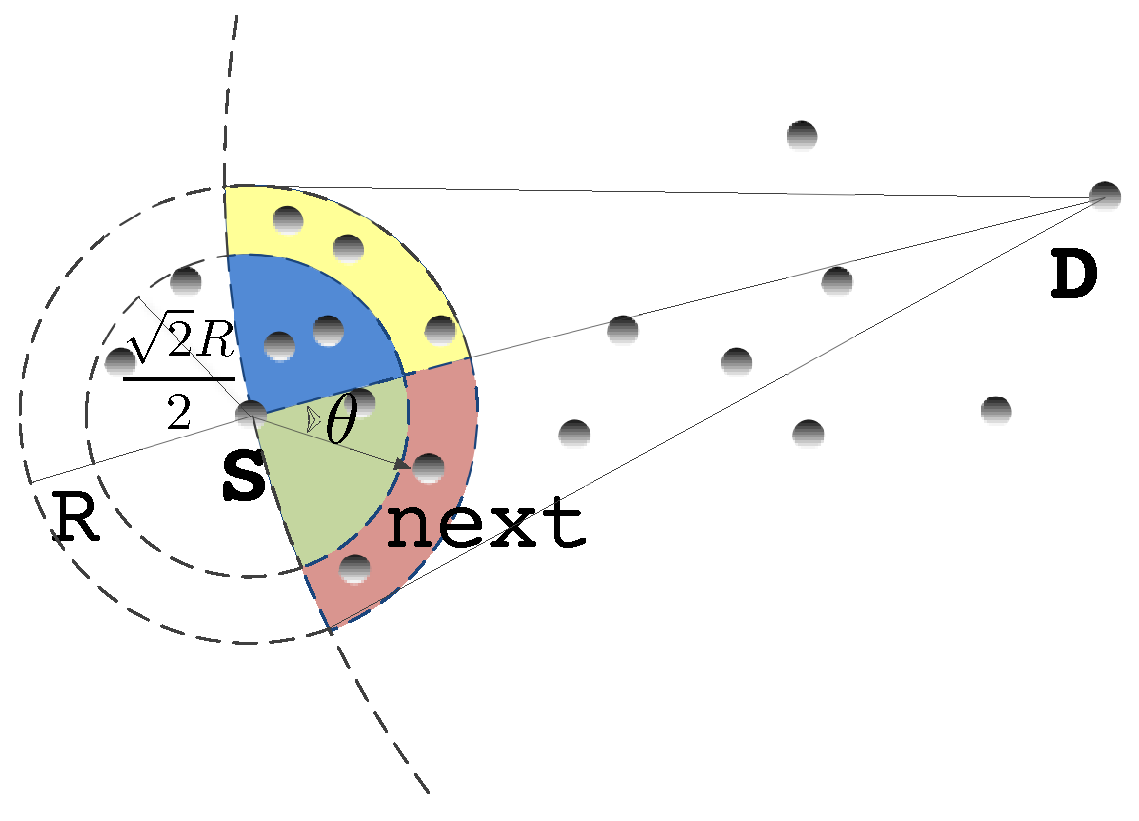
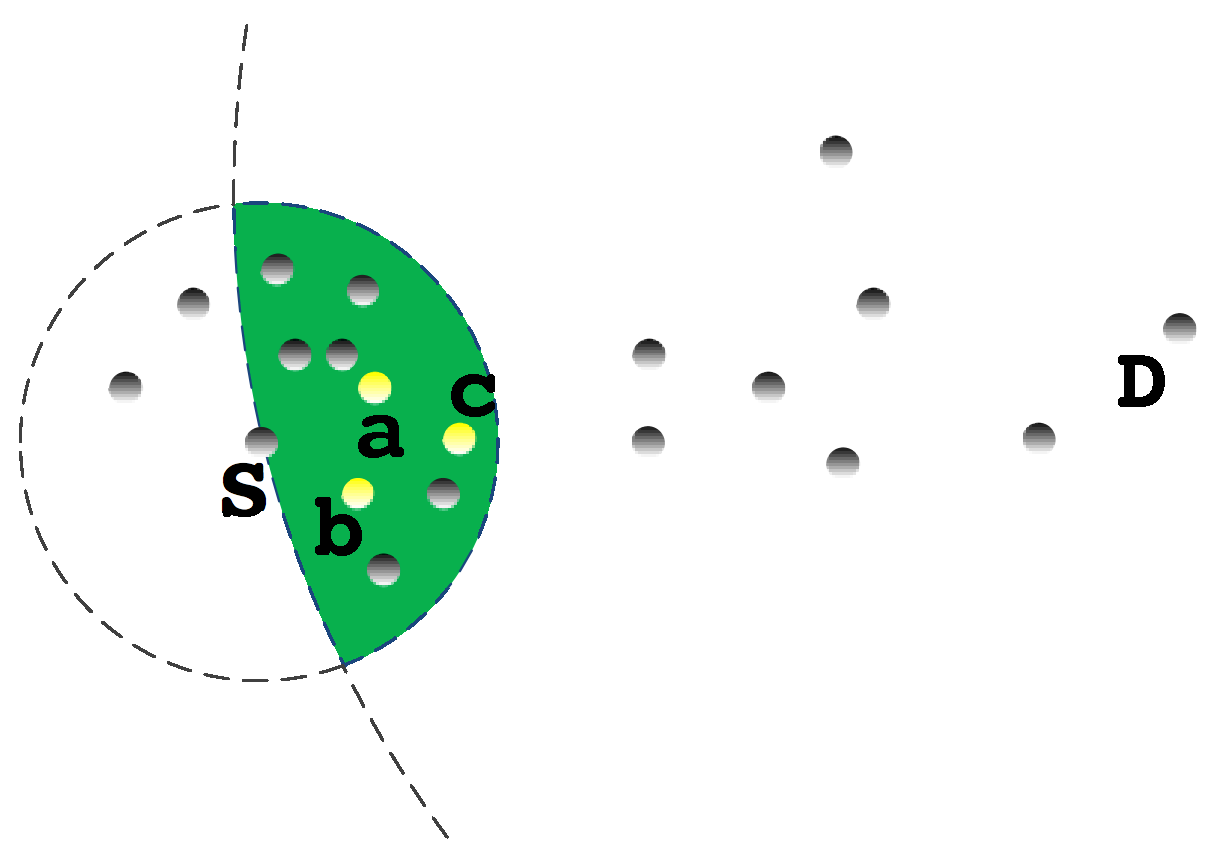
- Step 3: When the source node S is ready to transmit data to the destination node D, according to the routing table node state information (movement speed and distance), it selects the candidate set first. Then, according to Equation (9), it further selects the best next-hop node c from the candidate set and sends the packet to the node c.
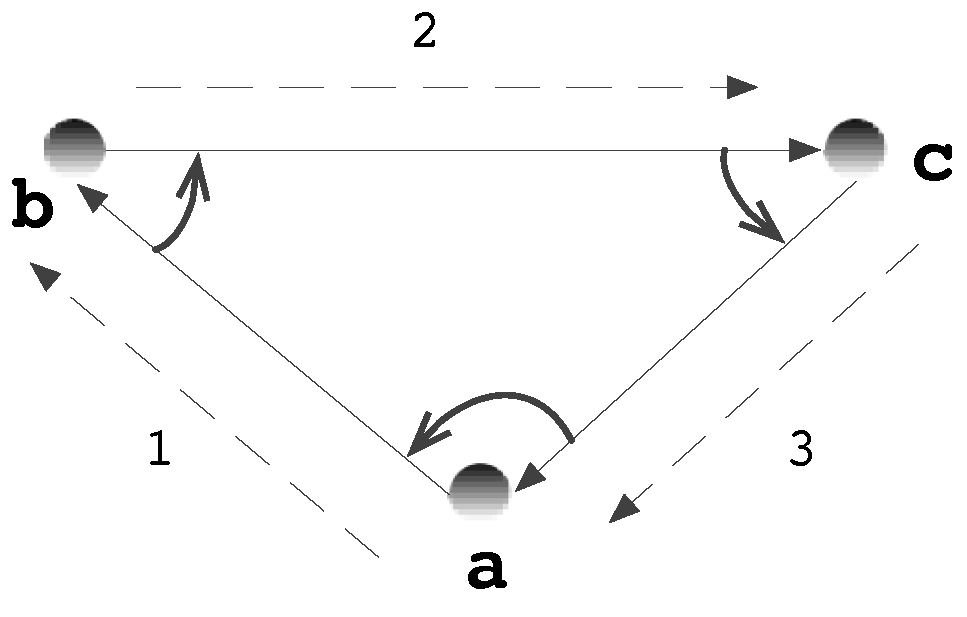
- Step 4: The node c receives the data packet, determines whether it is the destination node, if so, ends the routing process; otherwise, it determines whether the selected region is void, and if not, employs planar forwarding (right-hand rule), otherwise it returns to step 3.
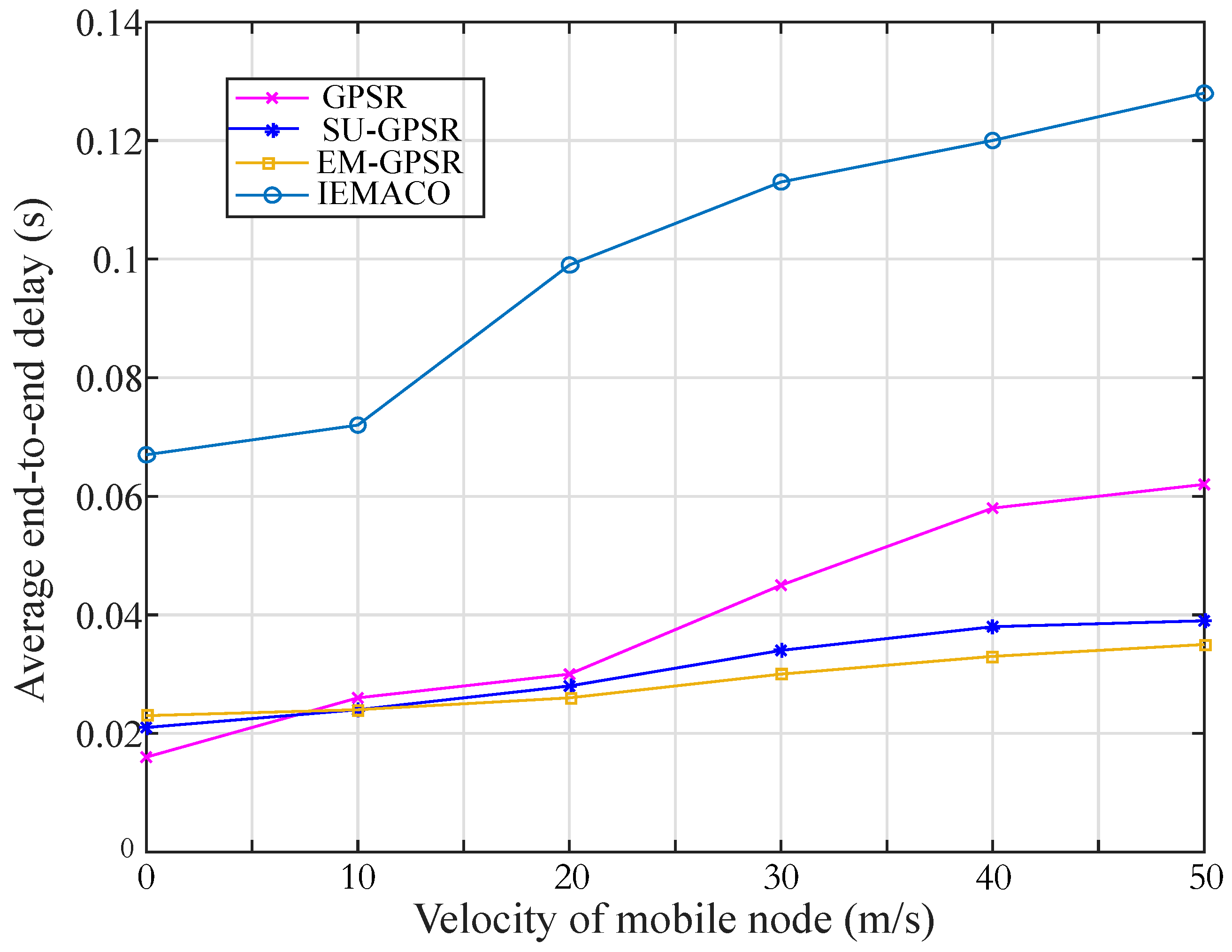
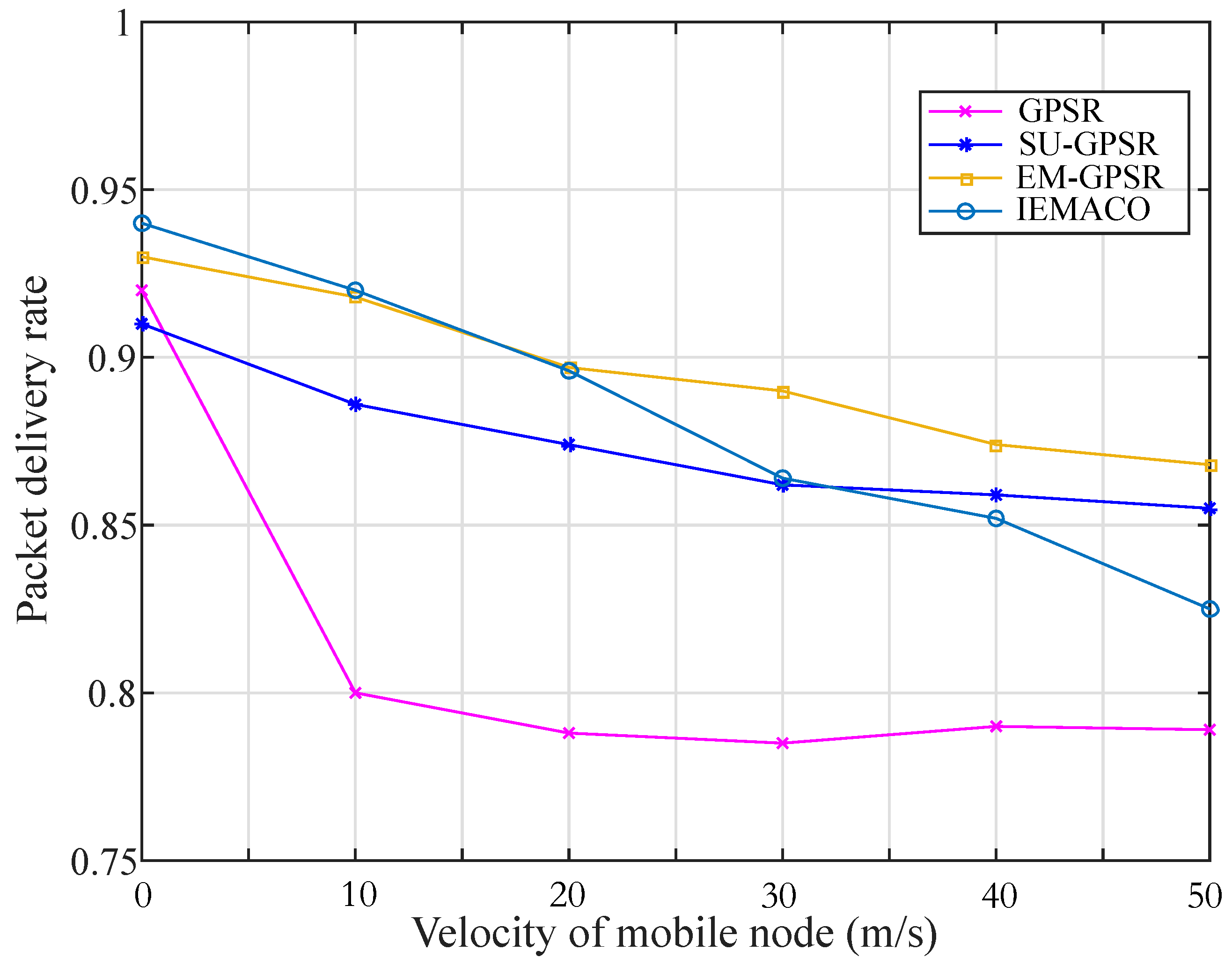
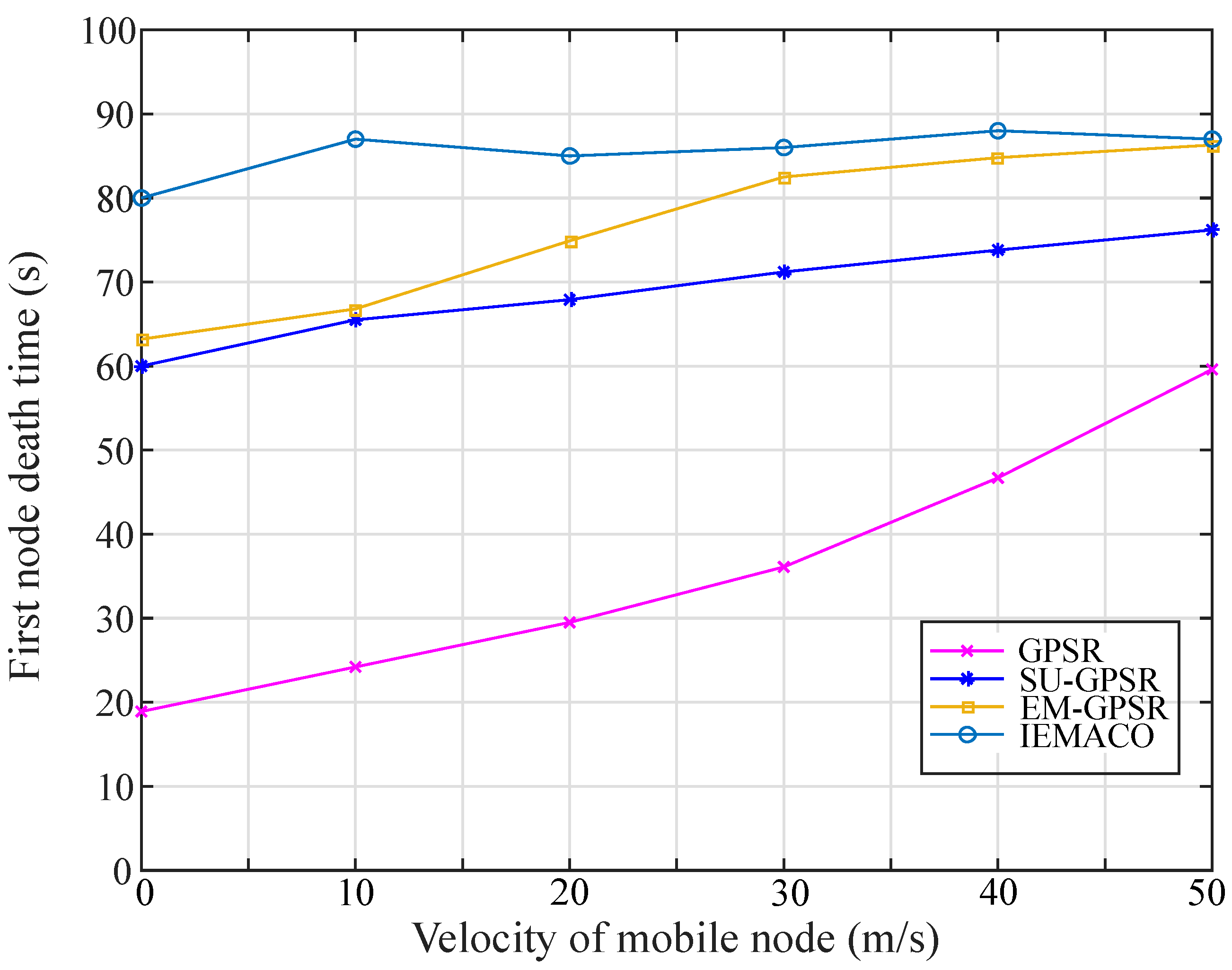
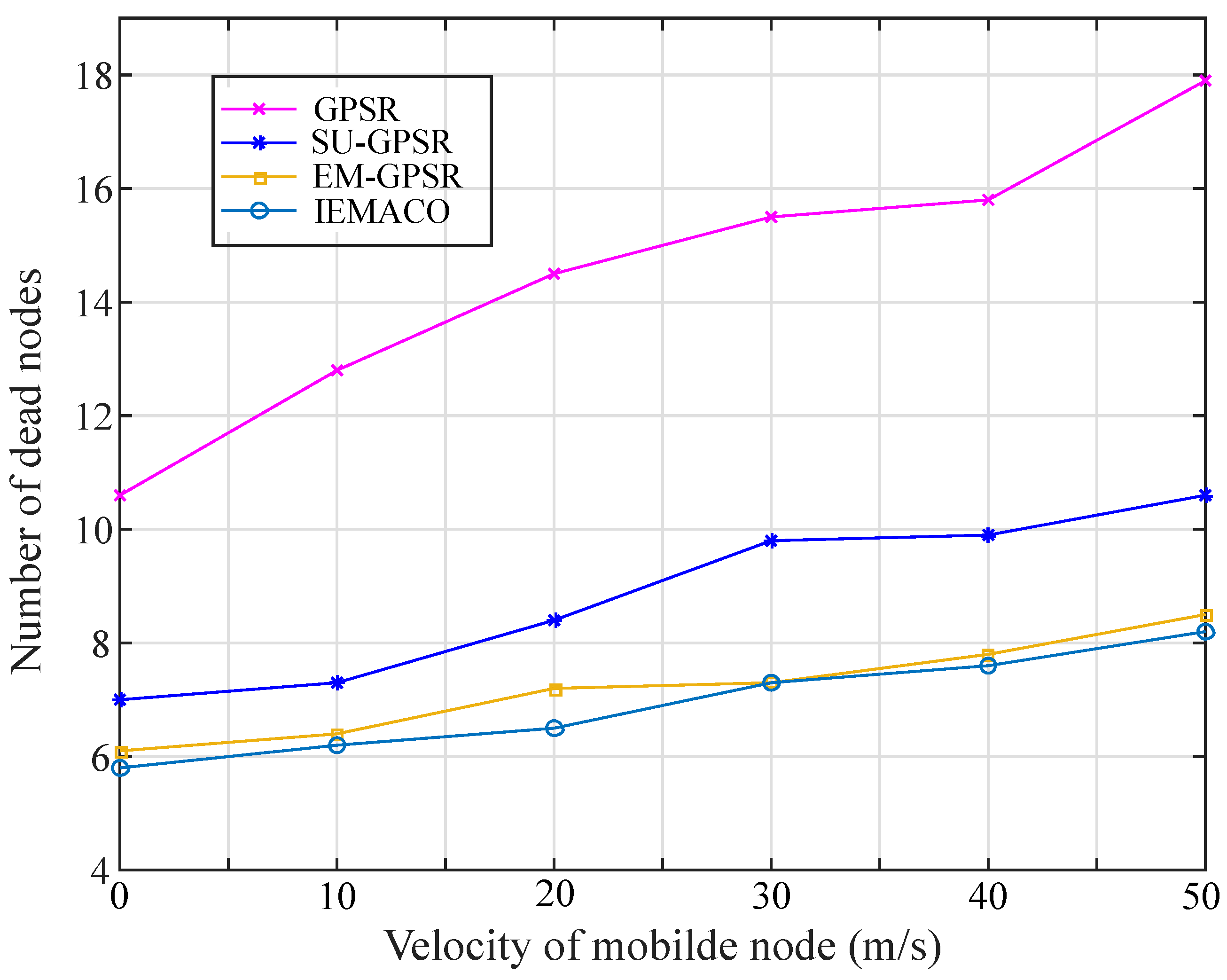
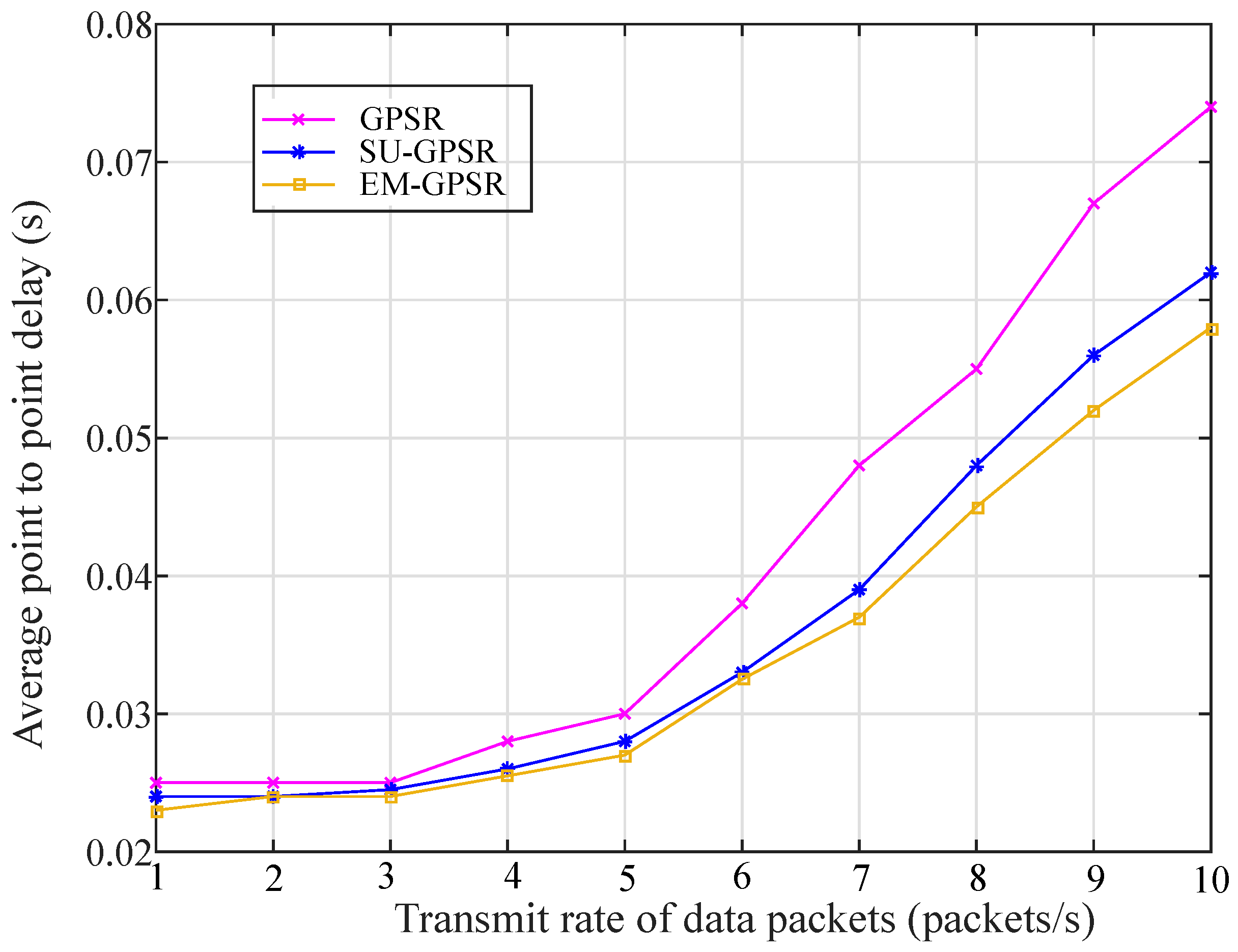
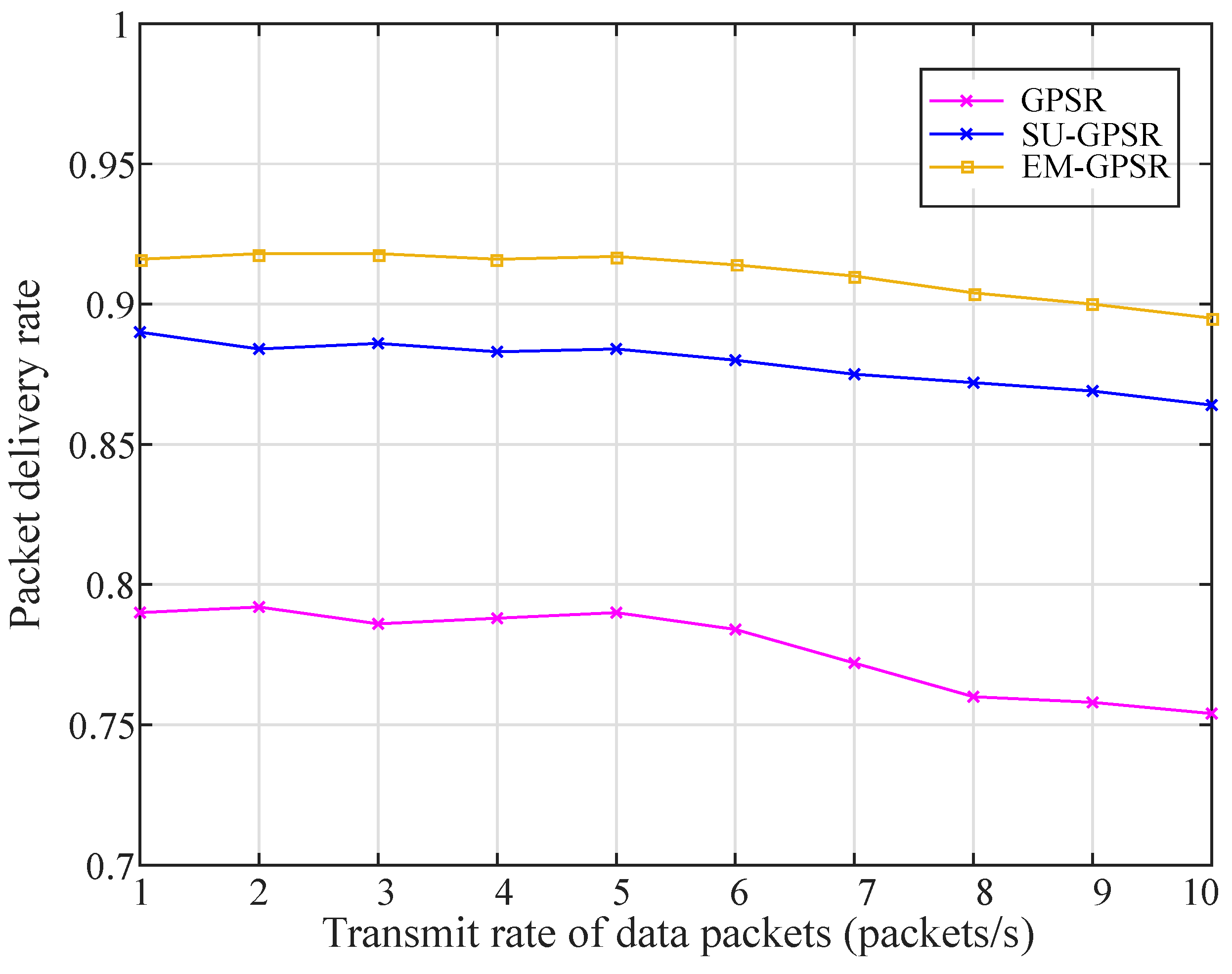
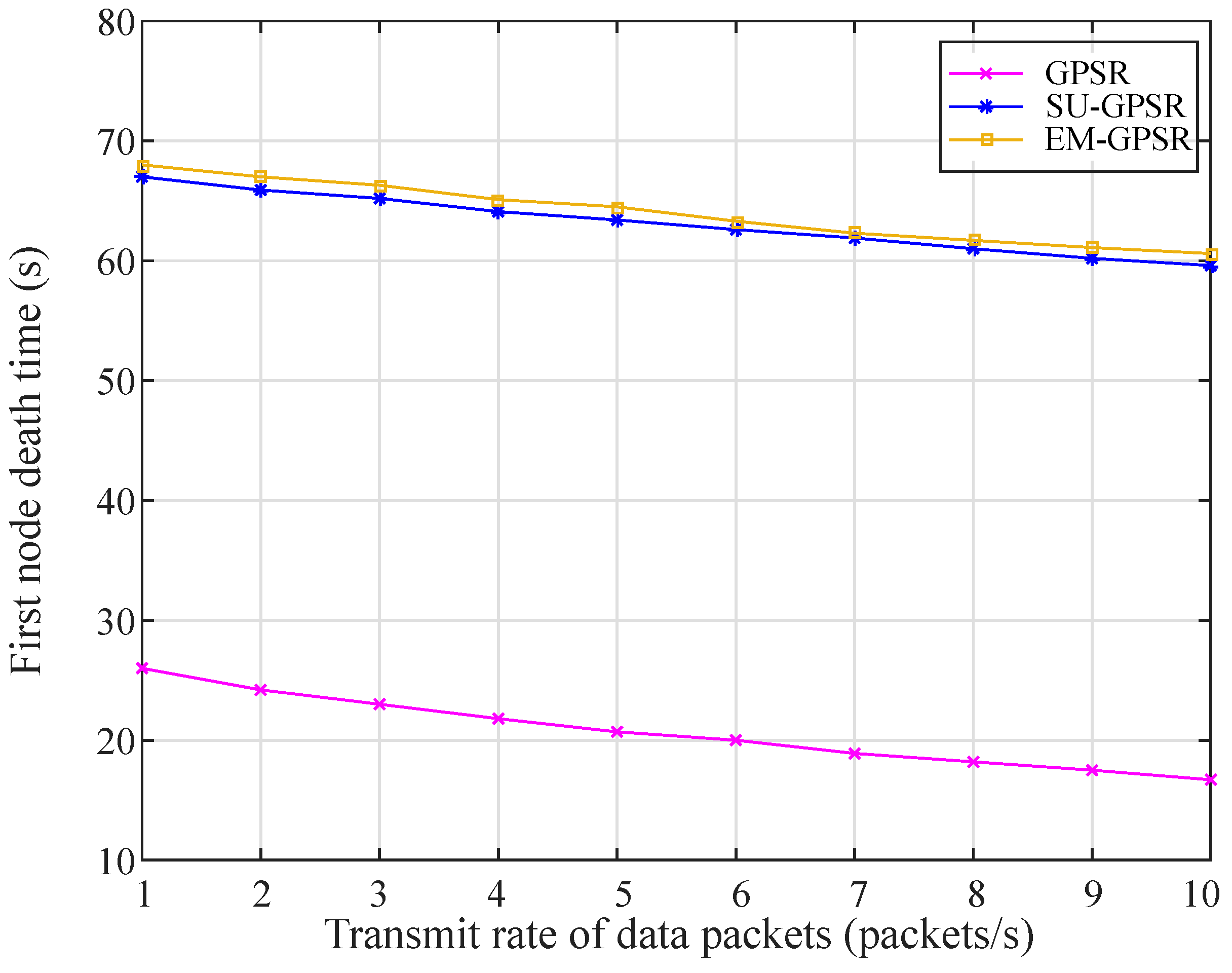
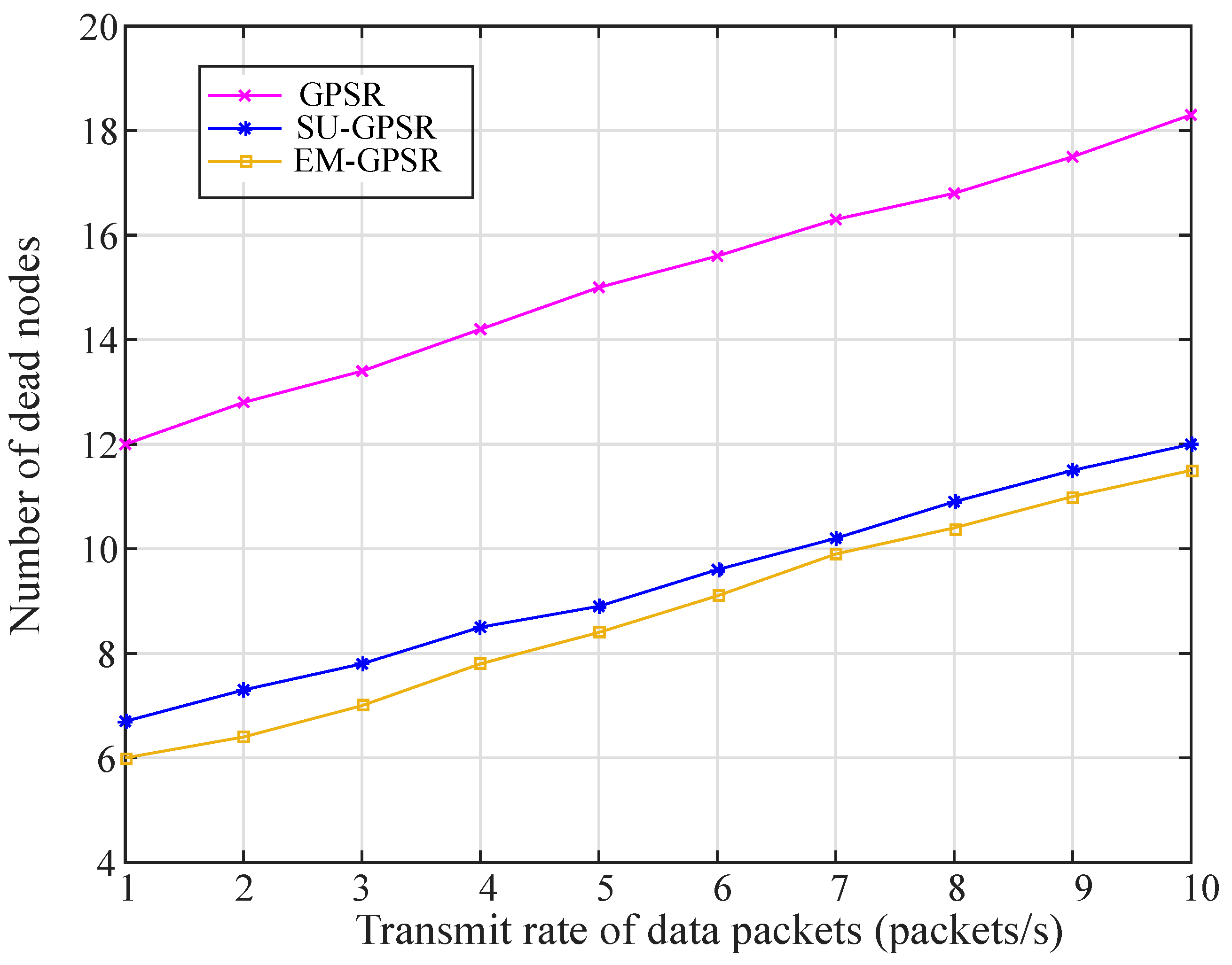
4. Simulation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kim, D.; Toh, C.K.; Choi, Y. Location-aware long-life route selection in wireless ad-hoc networks. Electron. Lett. 2000, 36, 1584–1586. [Google Scholar] [CrossRef]
- Argyroudis, P.G.; O’mahony, D. Secure routing for mobile ad-hoc networks. IEEE Commun. Surv. Tutor. 2005, 7, 2–21. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Q.; Li, B.; Luo, X.; Zhu, W. Energy-efficient routing in mobile ad-hoc networks: mobility-assisted case. IEEE Trans. Veh. Technol. 2006, 55, 369–379. [Google Scholar] [CrossRef]
- Tharani, S.; Arutchelvan, G.; Arulanandam, G. Location based clustering implemented for multicast backbone MANET. In Proceedings of the 2017 International Conference on Communication and Signal Processing (ICCSP), Chennai, India, 6–8 April 2017; pp. 0728–0732. [Google Scholar]
- Kumar, S.; Goyal, M.; Goyal, D.; Poonia, R.C. Routing protocols and security issues in MANET. In Proceedings of the 2017 International Conference on Infocom Technologies and Unmanned Systems (Trends and Future Directions)(ICTUS), Dubai, United Arab Emirates, 18–20 December 2017; pp. 818–824. [Google Scholar]
- Ullah, K.; Das, R.; Das, P.; Roy, A. Trusted and secured routing in MANET: An improved approach. In Proceedings of the 2015 International Symposium on Advanced Computing and Communication (ISACC), Silchar, India, 14–15 September 2015; pp. 297–302. [Google Scholar]
- Das, S.M.; Hu, Y.C.; Lee, C.G.; Lu, Y.H. Mobility-aware ad-hoc routing protocols for networking mobile robot teams. J. Commun. Netw. 2007, 9, 296–311. [Google Scholar] [CrossRef]
- Sharma, M.; Jain, A.; Shah, S. Wormhole attack in mobile Ad-Hoc networks. In Proceedings of the 2016 Symposium on Colossal Data Analysis and Networking (CDAN), Indore, India, 18–19 March 2016; pp. 1–4. [Google Scholar]
- Li, J.; Li, X.; Gao, Y.; Gao, Y.; Zhang, R. Dynamic Cloudlet-Assisted Energy-Saving Routing Mechanism for Mobile ad-hoc Networks. IEEE Access 2017, 5, 20908–20920. [Google Scholar] [CrossRef]
- Kumar, N.; Zeadally, S.; Rodrigues, J.J. QoS-aware hierarchical web caching scheme for online video streaming applications in internet-based vehicular ad-hoc networks. IEEE Trans. Ind. Electron. 2015, 62, 7892–7900. [Google Scholar] [CrossRef]
- Singh, S.K.; Kumar, P.; Singh, J.P. A survey on successors of LEACH protocol. IEEE Access 2017, 5, 4298–4328. [Google Scholar] [CrossRef]
- Nazhad, S.H.H.; Shojafar, M.; Shamshirband, S.; Conti, M. An efficient routing protocol for the QoS support of large-scale MANETs. Int. J. Commun. Syst. 2018, 31, e3384. [Google Scholar] [CrossRef]
- Naranjo, P.G.V.; Shojafar, M.; Mostafaei, H.; Pooranian, Z.; Baccarelli, E. P-SEP: A prolong stable election routing algorithm for energy-limited heterogeneous fog-supported wireless sensor networks. J. Supercomput. 2017, 73, 733–755. [Google Scholar] [CrossRef]
- Qi, Z.; Min, Y. A routing protocol for mobile sensor network based on leach. In Proceedings of the 10th International Conference on Wireless Communications, Networking and Mobile Computing (WiCOM 2014), Beijing, China, 26–28 September 2014; pp. 473–477. [Google Scholar]
- Chiang, C.C.; Wu, H.K.; Liu, W.; Gerla, M. Routing in clustered multihop, mobile wireless networks with fading channel. In Proceedings of the IEEE SICON, Singapore, 14–17 April 1997; Volume 97, pp. 197–211. [Google Scholar]
- Gerla, M.; Kwon, T.J.; Pei, G. On-demand routing in large ad-hoc wireless networks with passive clustering. In Proceedings of the 2000 IEEE Wireless Communications and Networking Confernce (WCNC), Chicago, IL, USA, 23–28 September 2000; Volume 1, pp. 100–105. [Google Scholar]
- Ephremides, A.; Varaiya, P.; Walrand, J. A simple dynamic routing problem. IEEE Trans. Autom. Control 1980, 25, 690–693. [Google Scholar] [CrossRef]
- Corson, M.S.; Ephremides, A. A distributed routing algorithm for mobile wireless networks. Wirel. Netw. 1995, 1, 61–81. [Google Scholar] [CrossRef]
- Ahmadi, M.; Shojafar, M.; Khademzadeh, A.; Badie, K.; Tavoli, R. A hybrid algorithm for preserving energy and delay routing in mobile ad-hoc networks. Wirel. Pers. Commun. 2015, 85, 2485–2505. [Google Scholar] [CrossRef]
- Lin, C.H.; Yuan, S.A.; Chiu, S.W.; Tsai, M.J. ProgressFace: An algorithm to improve routing efficiency of GPSR-like routing protocols in wireless ad-hoc networks. IEEE Trans. Comput. 2010, 59, 822–834. [Google Scholar] [CrossRef]
- Nithyanandan, L.; Sivarajesh, G.; Dananjayan, P. Modified GPSR Protocol for Wireless SensorNetworks. Int. J. Comput. Electr. Eng. 2010, 2, 324–328. [Google Scholar] [CrossRef]
- Yi, S.; Huang, X.; Wang, C. EA-GPSR, a routing protocol for energy harvesting wireless sensor networks. In Proceedings of the 2015 4th International Conference on Computer Science and Network Technology (ICCSNT), Harbin, China, 19–20 December 2015; Volume 1, pp. 1029–1032. [Google Scholar]
- Lochert, C.; Hartenstein, H.; Tian, J.; Fussler, H.; Hermann, D.; Mauve, M. A routing strategy for vehicular ad-hoc networks in city environments. In Proceedings of the IEEE 2003 Intelligent Vehicles Symposium, Columbus, OH, USA, 9–11 June 2003; pp. 156–161. [Google Scholar]
- Tang, G.; Xie, Y.; Tang, D.; Tang, J. Divisional perimeter routing for gpsr based on left and right hand rules. In Proceedings of the 2011 International Conference on Computer Science and Network Technology (ICCSNT), Harbin, China, 24–26 December 2011; Volume 2, pp. 726–729. [Google Scholar]
- Hu, T.; Liwang, M.; Huang, L.; Tang, Y. An enhanced GPSR routing protocol based on the buffer length of nodes for the congestion problem in VANETs. In Proceedings of the 2015 10th International Conference on Computer Science & Education (ICCSE), Cambridge, UK, 22–24 July 2015; pp. 416–419. [Google Scholar]
- Al-Roqi, Y.; Papanastasiou, S.; Peytchev, E. Ferry-assisted greedy perimeter stateless routing protocol for mobile ad-hoc networks (FA-GPSR). In Proceedings of the 2014 IEEE Symposium on Computers and Communication (ISCC), Funchal, Portugal, 23–26 June 2014; pp. 1–6. [Google Scholar]
- Lochert, C.; Mauve, M.; Füßler, H.; Hartenstein, H. Geographic routing in city scenarios. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2005, 9, 69–72. [Google Scholar] [CrossRef]
- Granelli, F.; Boato, G.; Kliazovich, D.; Vernazza, G. Enhanced GPSR Routing in Multi-Hop Vehicular Communications through Movement Awareness. IEEE Commun. Lett. 2007, 11, 781–783. [Google Scholar] [CrossRef] [Green Version]
- Tsiropoulou, E.E.; Mitsis, G.; Papavassiliou, S. Interest-aware energy collection & resource management in machine to machine communications. Ad Hoc Netw. 2018, 68, 48–57. [Google Scholar]
- Tsiropoulou, E.E.; Paruchuri, S.T.; Baras, J.S. Interest, energy and physical-aware coalition formation and resource allocation in smart IoT applications. In Proceedings of the 2017 51st Annual Conference on Information Sciences and Systems (CISS), Baltimore, MD, USA, 22–24 March 2017; pp. 1–6. [Google Scholar]
- Xian, Q.; Long, Y. An enhanced greedy perimeter stateless routing algorithm for wireless sensor network. In Proceedings of the IEEE International Conference of Online Analysis and Computing Science (ICOACS), Chongqing, China, 28–29 May 2016; pp. 181–184. [Google Scholar]
- Sun, Y.; Guo, J.; Yao, Y. Speed Up-Greedy Perimeter Stateless Routing Protocol for Wireless Sensor Networks (SU-GPSR). In Proceedings of the 2017 IEEE 18th International Conference on High Performance Switching and Routing (HPSR), Campinas, Brazil, 18–21 June 2017; pp. 1–6. [Google Scholar]
- Karp, B.; Kung, H.T. GPSR: Greedy Perimeter Stateless Routing for Wireless Networks. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking (MobiCom ’00), Boston, MA, USA, 6–11 August 2000; ACM: New York, NY, USA, 2000; pp. 243–254. [Google Scholar]
- Karp, B. Challenges in geographic routing: Sparse networks, obstacles, and traffic provisioning. In Proceedings of the DIMACS Workshop on Pervasive Networking, Berkeley, CA, USA, 21 May 2001. [Google Scholar]
- Wang, L.; Liang, H. Research and improvement of the wireless sensor network routing algorithm GPSR. In Proceedings of the 2012 International Conference on Computing, Measurement, Control and Sensor Network (CMCSN), Taiyuan, China, 7–9 July 2012; pp. 83–86. [Google Scholar]
- Giruka, V.C.; Singhal, M. Hello protocols for ad-hoc networks: overhead and accuracy tradeoffs. In Proceedings of the Sixth IEEE International Symposium on a World of Wireless Mobile and Multimedia Networks (WoWMoM 2005), Taormina-Giardini Naxos, Italy, 16 June 2005; pp. 354–361. [Google Scholar]
- Boukerche, A. Performance evaluation of routing protocols for ad-hoc wireless networks. Mob. Netw. Appl. 2004, 9, 333–342. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Scene size | 1000 m × 1000 m | Mobile nodel | Random Way Point |
| Node Velocity | 0–50 m/s | Node number of network | 40 |
| Initial node energy | 1000 J | Packet rate | 1–10 packets/s |
| MAC protocal | IEEE 802.11 | Data rate | 1 Mbps |
| Communication range | 250 m | Packet size | 512 Bytes |
| Simulation time | 200 s | HELLO packet size | 15 Bytes |
| Max waiting time of HELLO packet | 12 s | Update cycle of HELLO packet | 3.5–4.5 s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, D.; Xia, H.; Xu, E.; Jing, D.; Zhang, H. An Energy-Balanced Geographic Routing Algorithm for Mobile Ad Hoc Networks. Energies 2018, 11, 2219. https://doi.org/10.3390/en11092219
Yang D, Xia H, Xu E, Jing D, Zhang H. An Energy-Balanced Geographic Routing Algorithm for Mobile Ad Hoc Networks. Energies. 2018; 11(9):2219. https://doi.org/10.3390/en11092219
Chicago/Turabian StyleYang, Dong, Hongxing Xia, Erfei Xu, Dongliang Jing, and Hailin Zhang. 2018. "An Energy-Balanced Geographic Routing Algorithm for Mobile Ad Hoc Networks" Energies 11, no. 9: 2219. https://doi.org/10.3390/en11092219
APA StyleYang, D., Xia, H., Xu, E., Jing, D., & Zhang, H. (2018). An Energy-Balanced Geographic Routing Algorithm for Mobile Ad Hoc Networks. Energies, 11(9), 2219. https://doi.org/10.3390/en11092219