Practical Endurance Estimation for Minimizing Energy Consumption of Multirotor Unmanned Aerial Vehicles


Abstract
:
1. Introduction
2. Materials and Methods
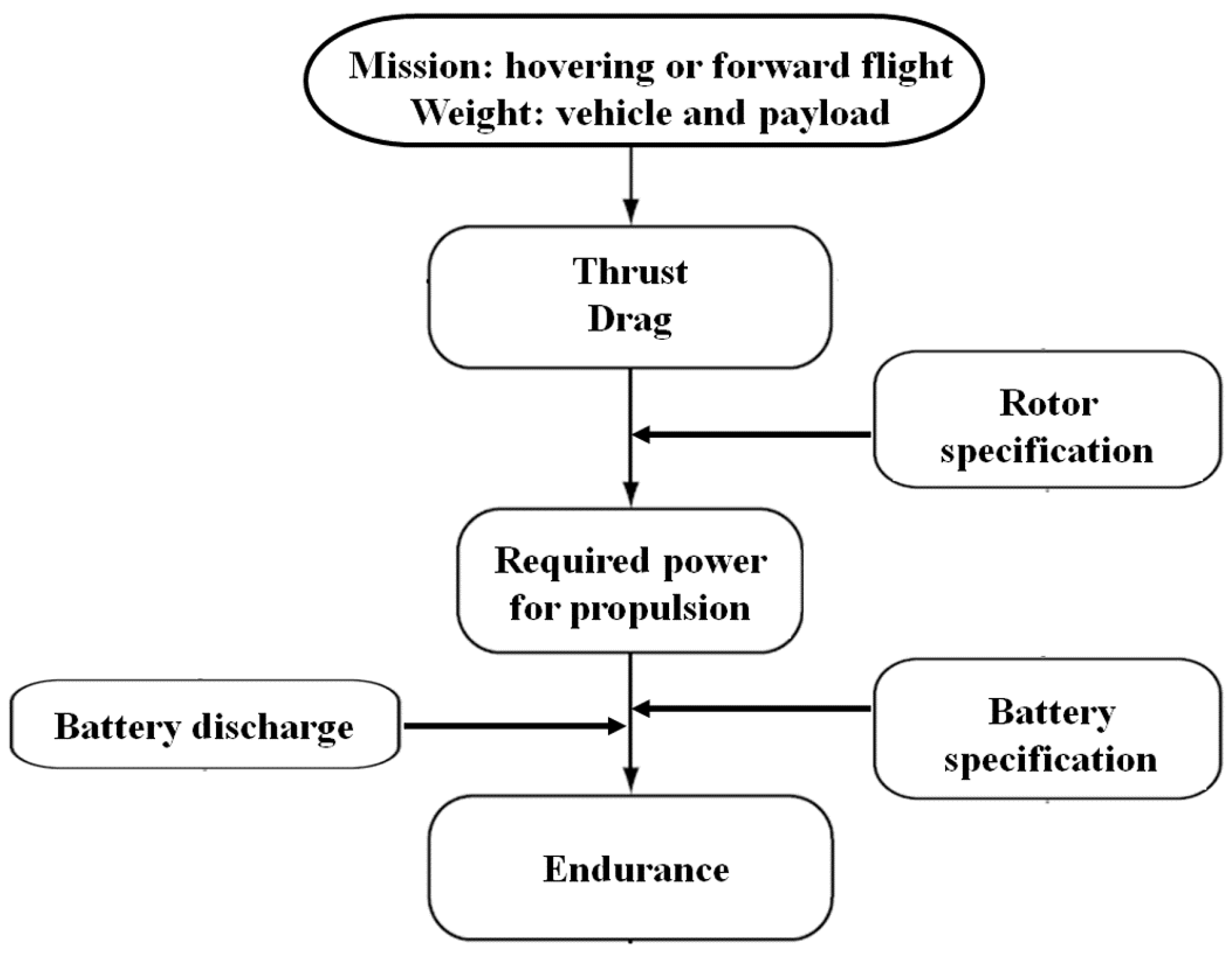
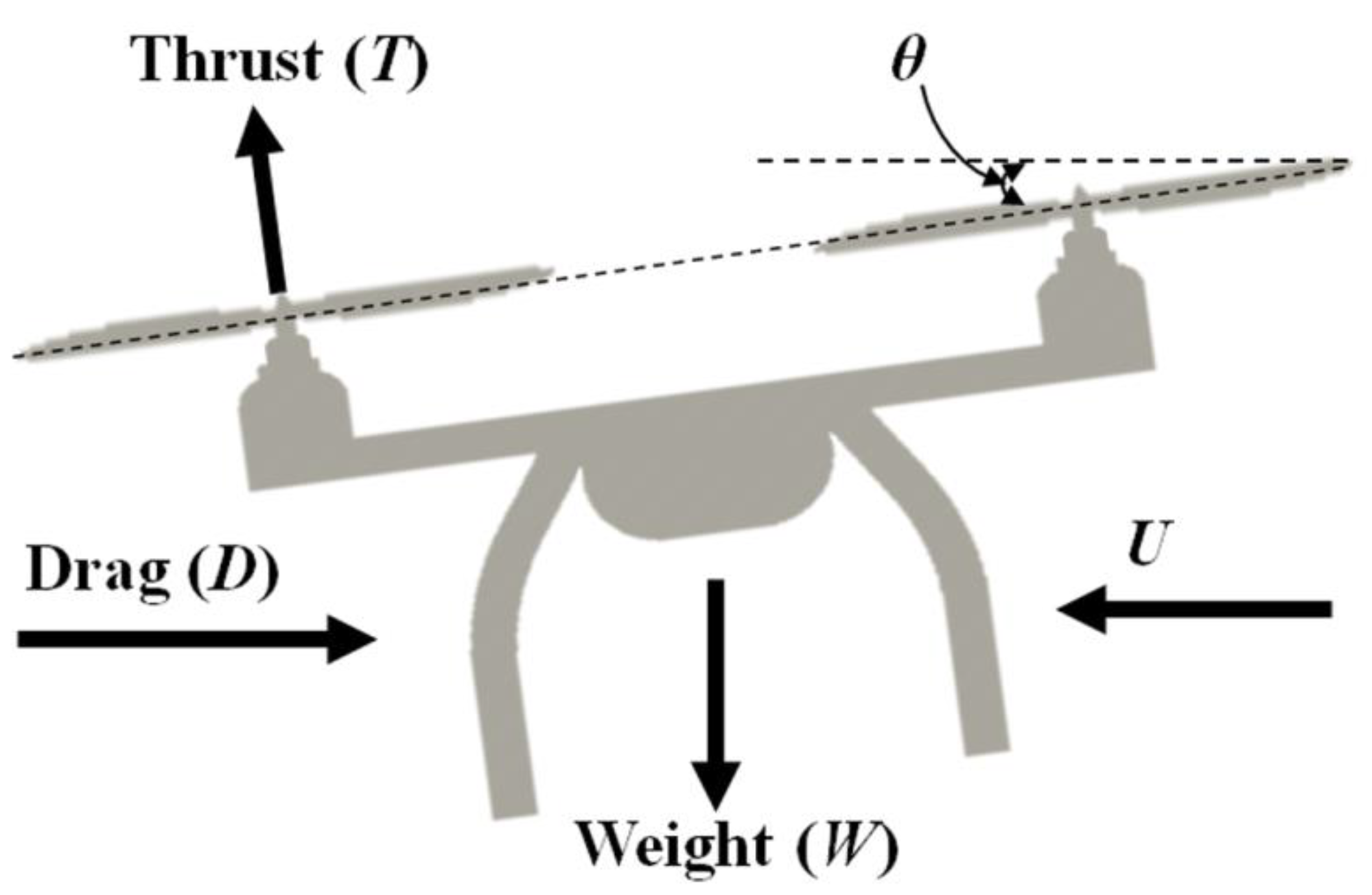
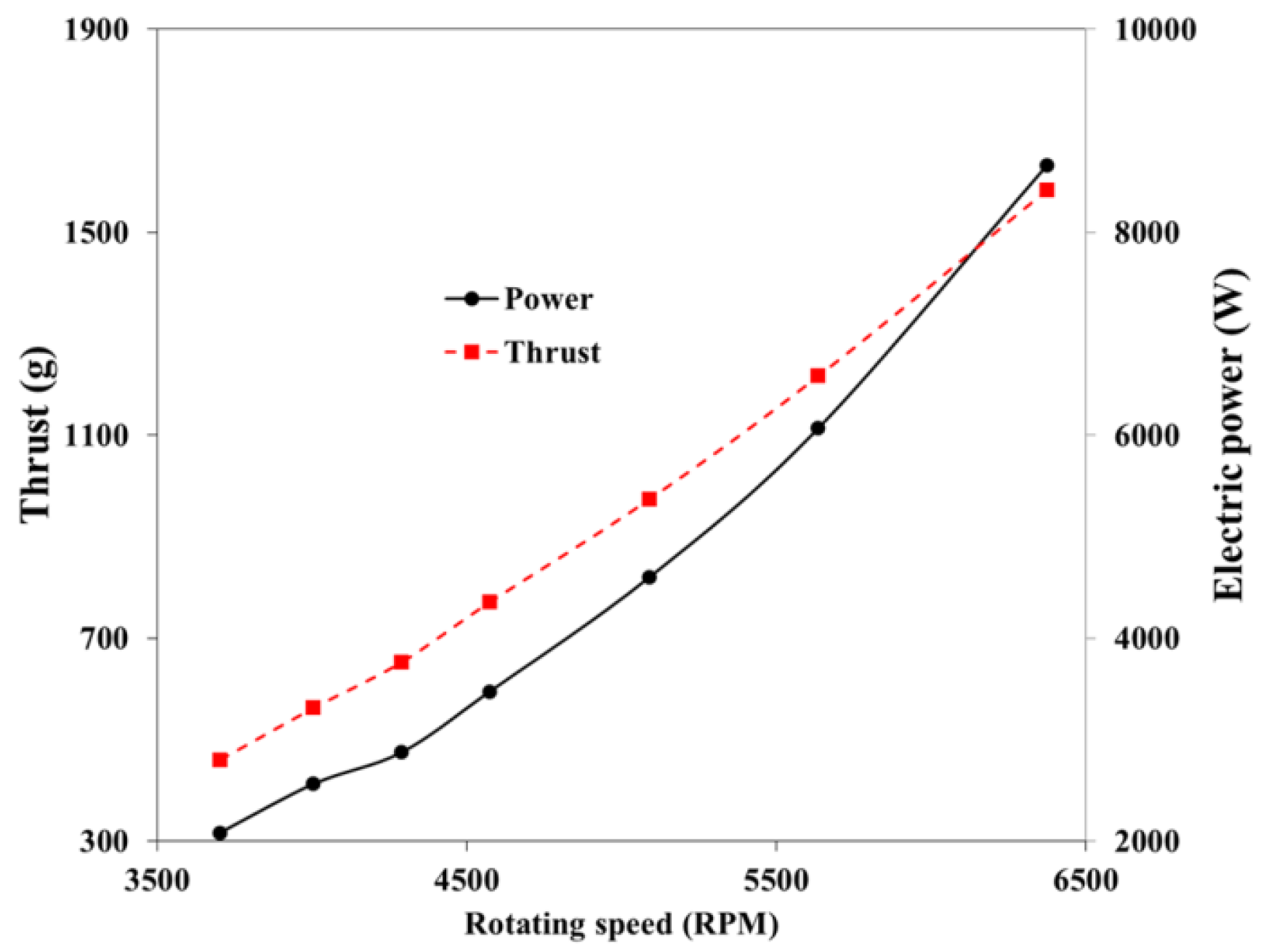
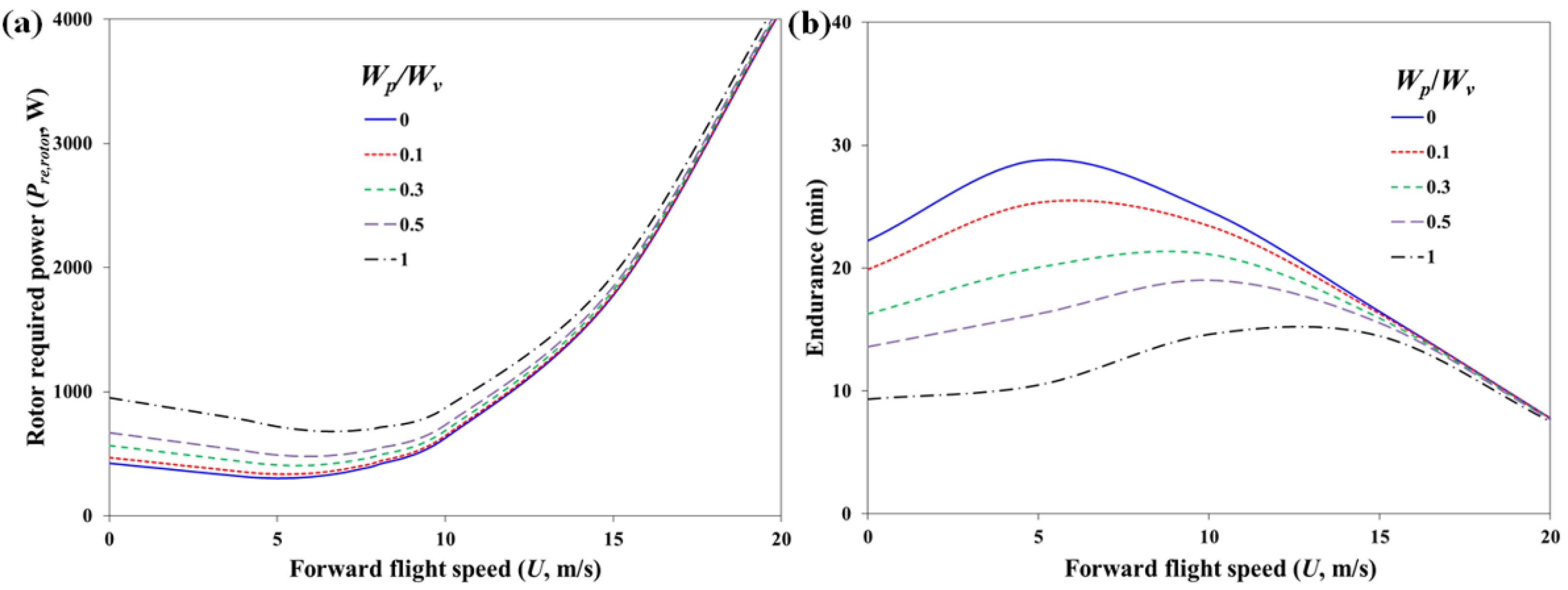
2.1. Required Power Calculation
2.2. Battery Discharge
2.3. Endurance Estimation
- Specify the time increment Δt, then time t is jΔt (j = 0, 1, 2, 3, …).
- In each time step, the battery voltage is calculated by Equation (11).
- The available battery power should be the same with the required power for propulsion (Pb,av = Pre). To maintain the same power, the required current with a decrease in voltage is increased and obtained in C (8).
- Based on the current, the actual available capacity is obtained in Equation (9) and the residual capacity can then be estimated using:
- Steps 2 through 4 are repeated until the remaining capacity converges Cj+1 ≈ (1 − λ) C0.
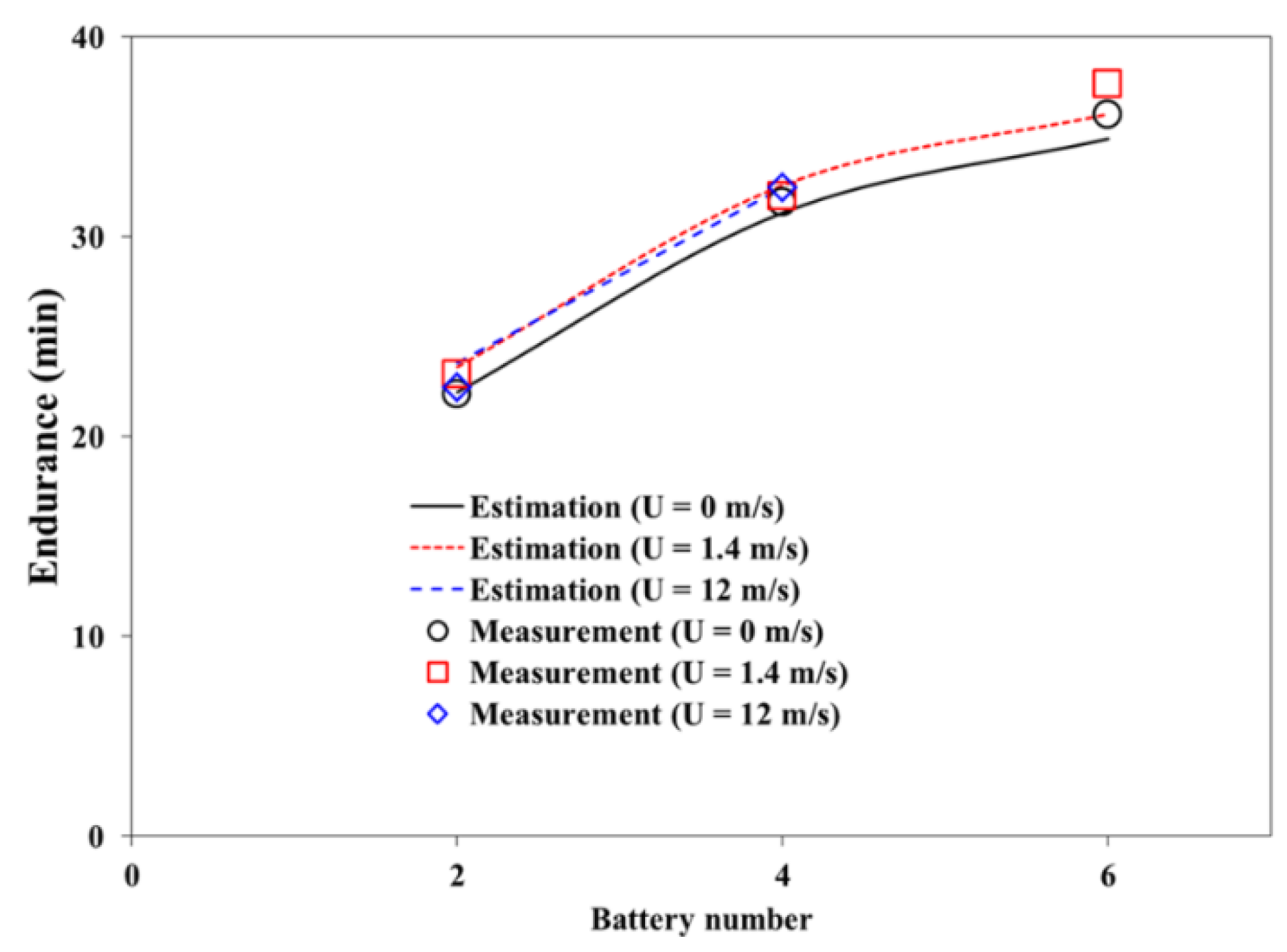
2.4. Specifications of UAV Employed for Validation
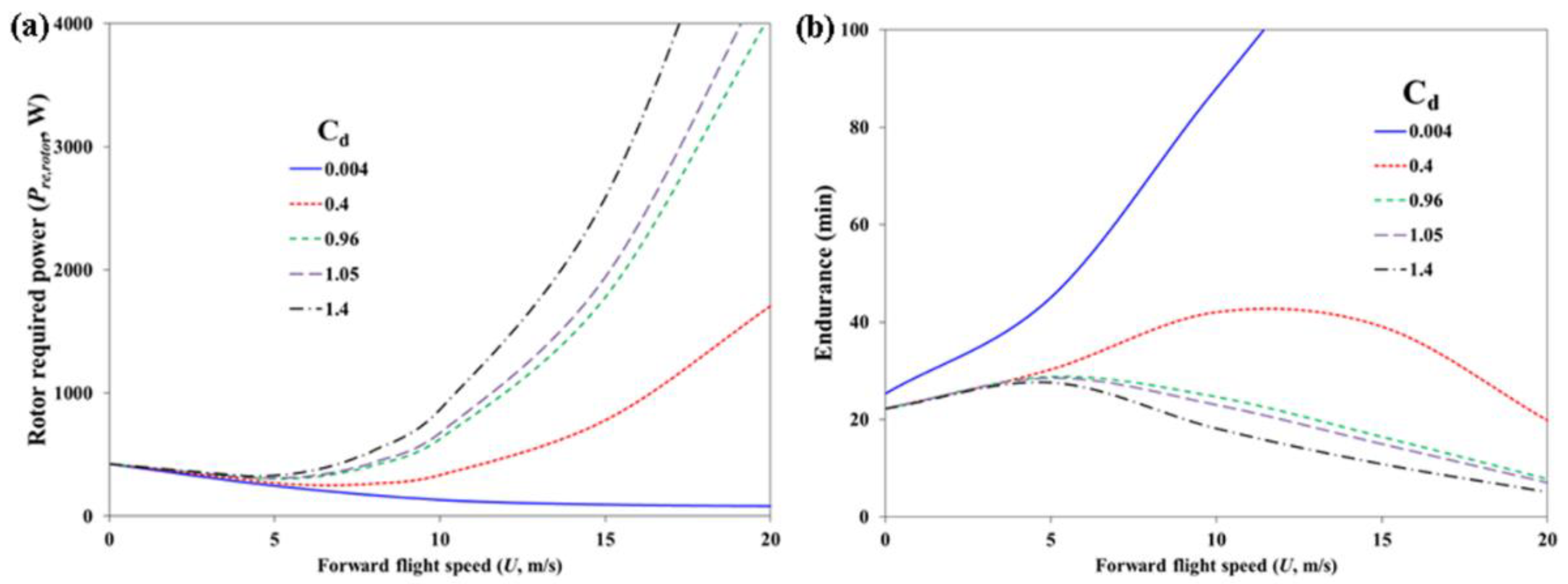
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Newcome, L.R. Unmanned Aviation: A Brief History of Unmanned Aerial Vehicles; American Institute of Aeronautics and Astronautics: Orlando, FL, USA, 2004. [Google Scholar]
- Rao, B.; Gopi, A.G.; Maione, R. The societal impact of commercial drones. Technol. Soc. 2016, 45, 83–90. [Google Scholar] [CrossRef]
- Cummings, M.L.; Bruni, S.; Mercier, S.; Mitchell, P. Automation Architecture for Single Operator, Multiple UAV Command and Control; Massachusetts Institute of Technology: Cambridge, MA, USA, 2007. [Google Scholar]
- Han, W.; Lei, Y.; Zhou, X. Application of unmanned aerial vehicle survey in power grid engineering construction. Electr. Power Surv. Des. 2010, 3, 019. [Google Scholar]
- Cai, G.; Dias, J.; Seneviratne, L. A survey of small-scale unmanned aerial vehicles: Recent advances and future development trends. Unmanned Syst. 2014, 2, 175–199. [Google Scholar] [CrossRef]
- Hoffmann, G.; Huang, H.; Waslander, S.; Tomlin, C. Quadrotor helicopter flight dynamics and control: Theory and experiment. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007. [Google Scholar]
- Bronz, M.; Moschetta, J.M.; Brisset, P.; Gorraz, M. Towards a long endurance mav. Int. J. Micro Air Veh. 2009, 1, 241–254. [Google Scholar] [CrossRef]
- Gordon, L.J. Principles of Helicopter Aerodynamics; Cambridge University: Cambridge, UK, 2000. [Google Scholar]
- Beekman, D.W. Micro air vehicle endurance versus battery size. In Proceedings of the SPIE International Society for Optical Engineering, Orlando, FL, USA, 5–9 April 2010. [Google Scholar]
- Figliozzi, M.A. Lifecycle modeling and assessment of unmanned aerial vehicles (Drones) CO2e emissions. Transp. Res. Part D 2017, 57, 251–261. [Google Scholar] [CrossRef]
- D’Andrea, R. Guest Editorial Can Drones Deliver? IEEE Trans. Autom. Sci. Eng. 2014, 11, 647–648. [Google Scholar] [CrossRef]
- Traub, L.W. Range and endurance estimates for battery-powered aircraft. J. Aircr. 2011, 48, 703–707. [Google Scholar] [CrossRef]
- Verbeke, J.; Hulens, D.; Ramon, H.; Goedeme, T.; De Schutter, J. The design and construction of a high endurance hexacopter suited for narrow corridors. In Proceedings of the International Conference on Unmanned Aircraft Systems, Orlando, FL, USA, 27–30 May 2014; pp. 543–551. [Google Scholar]
- Gatti, M.; Giulietti, F. Preliminary design analysis methodology for electric multirotor. IFAC Proc. 2013, 46, 58–63. [Google Scholar] [CrossRef]
- Gatti, M.; Giulietti, F.; Turci, M. Maximum endurance for battery-powered rotary-wing aircraft. Aerosp. Sci. Technol. 2015, 45, 174–179. [Google Scholar] [CrossRef]
- Abdilla, A.; Richards, A.; Burrow, S. Power and endurance modelling of battery-powered rotorcraft. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 675–680. [Google Scholar]
- Cheng, F.; Hua, W.; Pin, C. Rotorcraft flight endurance estimation based on a new battery discharge model. Chin. J. Aeronaut. 2017, 30, 1561–1569. [Google Scholar] [CrossRef]
- Hassanalian, M.; Radmanesh, M.; Sedaghat, A. Increasing flight endurance of MAVS using multiple quantum well solar cells. Int. J. Aeronaut. Space Sci. 2014, 15, 212–217. [Google Scholar] [CrossRef]
- Peukert, W. Über die Abhängigkeit der Kapazität von der Entladestromstärke bei Bleiakkumulatoren. Elektrotechnische Zeitschrift 1897, 20, 20–21. [Google Scholar]
- Su, Y.; Liahng, H.; Wu, J. Multilevel Peukert equations based residual capacity estimation method for lead-acid batteries. In Proceedings of the IEEE International Conference on Sustainable Energy Technologies, Singapore, 24–27 November 2008; pp. 101–105. [Google Scholar]
- Traub, L.W. Calculation of constant power lithium battery discharge curves. Batteries 2016, 2, 17. [Google Scholar] [CrossRef]
- Tremblay, O.; Dessaint, L.-A. Experimental validation of a battery dynamic model for EV applications. World Electr. Veh. J. 2009, 3, 289–298. [Google Scholar] [CrossRef]
- Blevins, R.D. Applied Fluid Dynamics Handbook; Van Nostrand Reinhold Company: New York, UY, USA, 1984. [Google Scholar]
- Hoerner, S.F. Fluid-Dynamic Drag: Practical Information on Aerodynamic Drag and Hydrodynamic Resistance; Hoerner Fluid Dynamics: Bakersfield, CA, USA, 1965. [Google Scholar]
- Andrea, D. Battery Management Systems for Large Lithium Ion Battery Packs; Artech House: Boston, MA, USA, 2010. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Units |
|---|---|---|---|
| Airframe | |||
| Number of rotor | N | 6 | |
| Vehicle weight | Wv | 10 | kg |
| Frontal area | S | 0.827 | m2 |
| Propeller radius | r | 558.8 | mm |
| Battery | |||
| Nominal capacity | C0 | 16,000 | mAh |
| Rated discharge time | t0 | 12 | min |
| Fully charged voltage | V0 | 24.5 | V |
| Standard voltage | VS | 22.2 | V |
| Weight | Wb | 2 | kg |
| Discharge fraction | λ | 0.7 | |
| Shape | Drag Coefficient | |
|---|---|---|
| Cube |  | 1.05 |
| Parachute |  | 1.4 |
| Truck |  | 0.96 |
| Large bird |  | 0.4 |
| Dolphin |  | 0.004 |
| Number of Battery | Measured Full Charged Voltage (V0, V) | Nominal Capacity (C0, mAh) | Total Weight (W, kg) | Flight Velocity (U, m/s) | Endurance (min) | |
|---|---|---|---|---|---|---|
| Estimation | Measurement | |||||
| 2 | 49 | 16,000 | 14 | 0 | 22.24 | 22.15 |
| 2 | 49 | 16,000 | 14 | 1.4 | 23.50 | 23.11 |
| 2 | 49 | 16,000 | 14 | 12 | 23.70 | 22.47 |
| 4 | 49 | 32,000 | 18 | 0 | 31.21 | 31.73 |
| 4 | 49 | 32,000 | 18 | 1.4 | 32.58 | 32.04 |
| 4 | 49 | 32,000 | 18 | 12 | 32.47 | 32.48 |
| 6 | 49 | 48,000 | 22 | 0 | 34.91 | 36.15 |
| 6 | 49 | 48,000 | 22 | 1.4 | 36.15 | 37.67 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hwang, M.-h.; Cha, H.-R.; Jung, S.Y. Practical Endurance Estimation for Minimizing Energy Consumption of Multirotor Unmanned Aerial Vehicles. Energies 2018, 11, 2221. https://doi.org/10.3390/en11092221
Hwang M-h, Cha H-R, Jung SY. Practical Endurance Estimation for Minimizing Energy Consumption of Multirotor Unmanned Aerial Vehicles. Energies. 2018; 11(9):2221. https://doi.org/10.3390/en11092221
Chicago/Turabian StyleHwang, Myeong-hwan, Hyun-Rok Cha, and Sung Yong Jung. 2018. "Practical Endurance Estimation for Minimizing Energy Consumption of Multirotor Unmanned Aerial Vehicles" Energies 11, no. 9: 2221. https://doi.org/10.3390/en11092221
APA StyleHwang, M. -h., Cha, H. -R., & Jung, S. Y. (2018). Practical Endurance Estimation for Minimizing Energy Consumption of Multirotor Unmanned Aerial Vehicles. Energies, 11(9), 2221. https://doi.org/10.3390/en11092221