A Cost-Effective Decentralized Control for AC-Stacked Photovoltaic Inverters

 ,
, 

Abstract
:1. Introduction
- (1)
- It reduces the communication links to a great extent compared with existing control methods. Only one communication link is needed. Thus, system reliability is greatly improved and communication cost is reduced;
- (2)
- It achieves voltage self-synchronization with grid voltage with no need for PLL;
- (3)
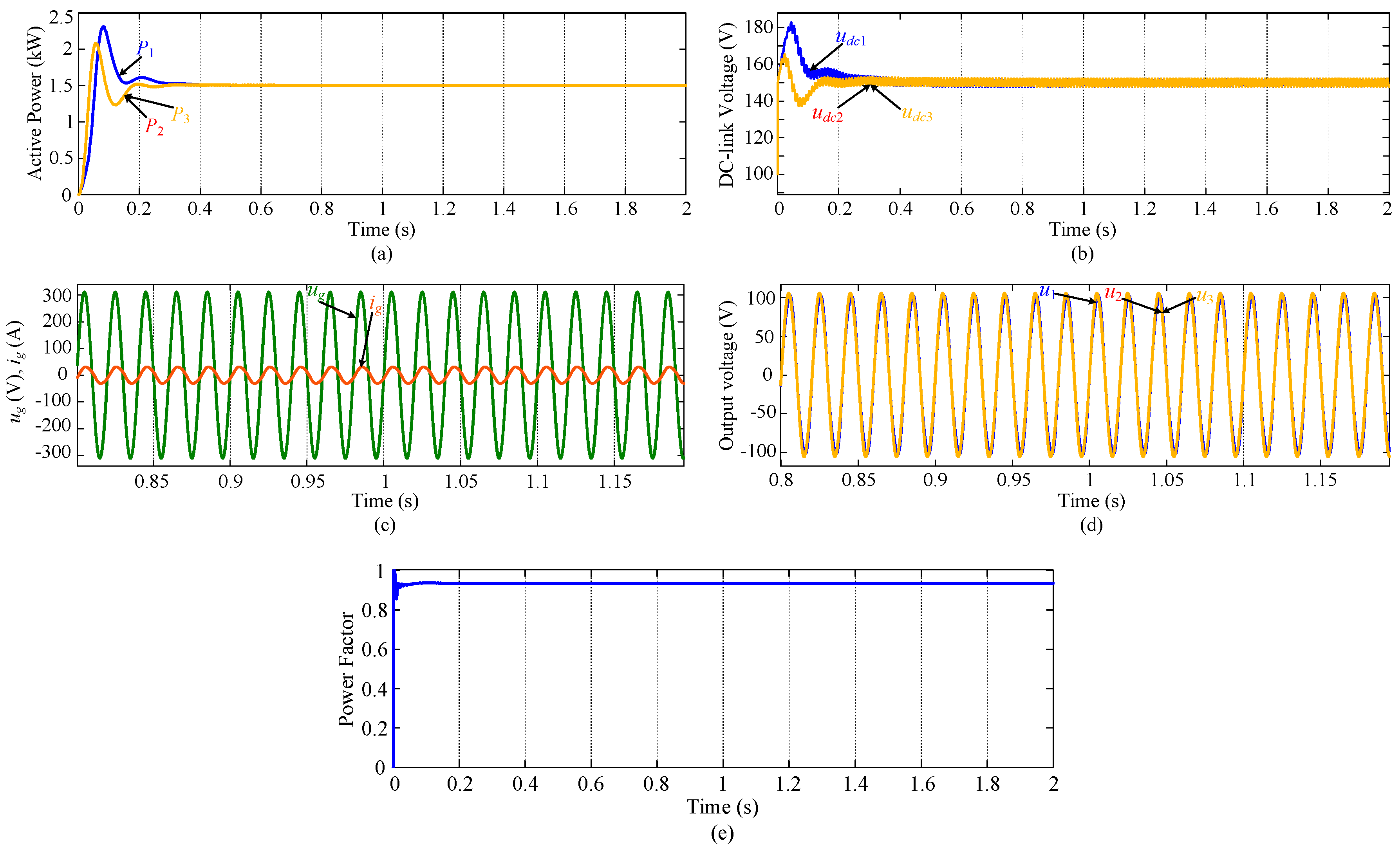
- It can achieve a desirable unity PF or a required non-unity PF;
- (4)
- It achieves MPPT of all cascaded inverters under symmetrical conditions and partial shading;
- (5)
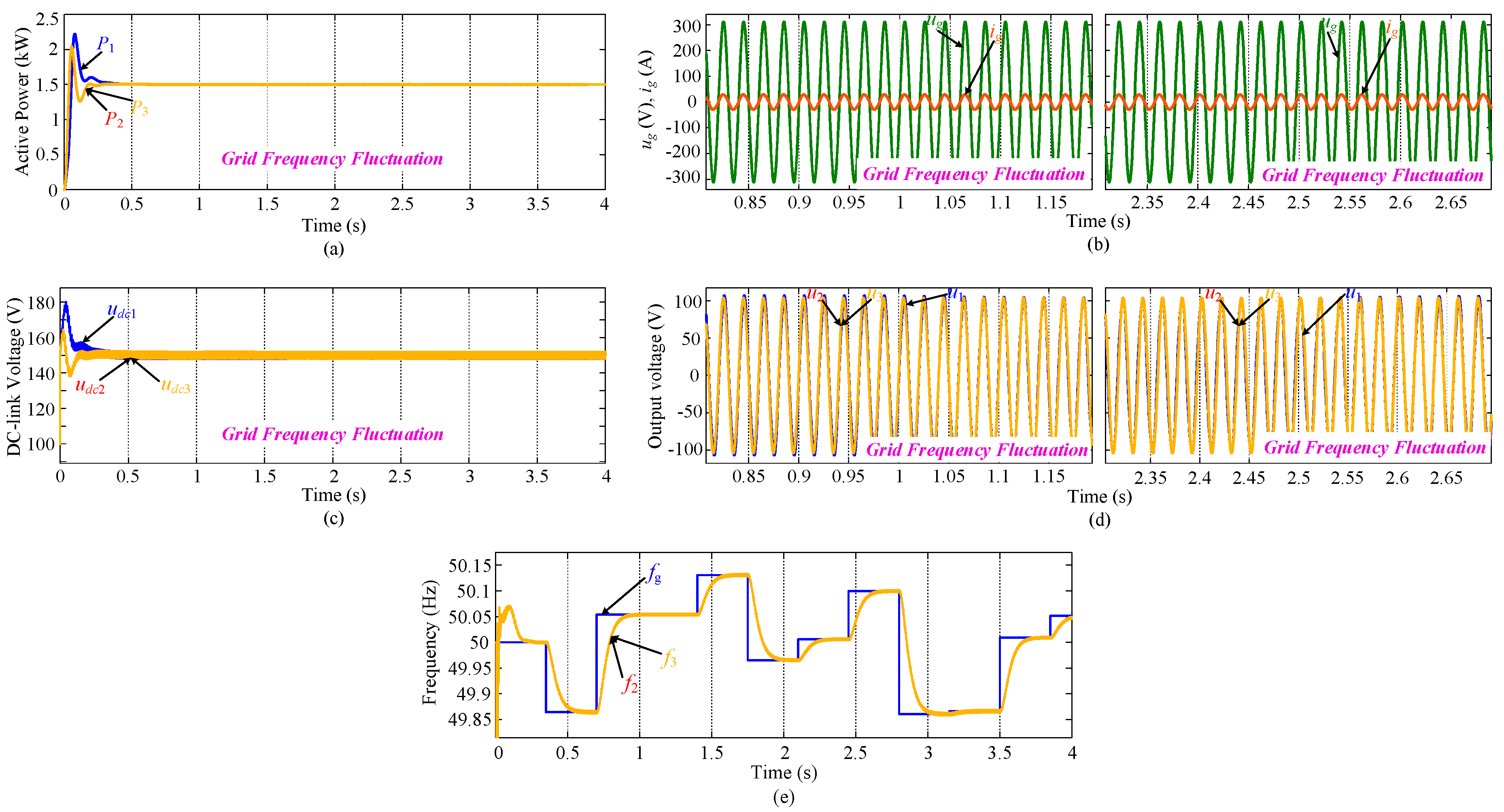
- It is available under grid voltage sag and grid frequency fluctuation.
2. System Modeling
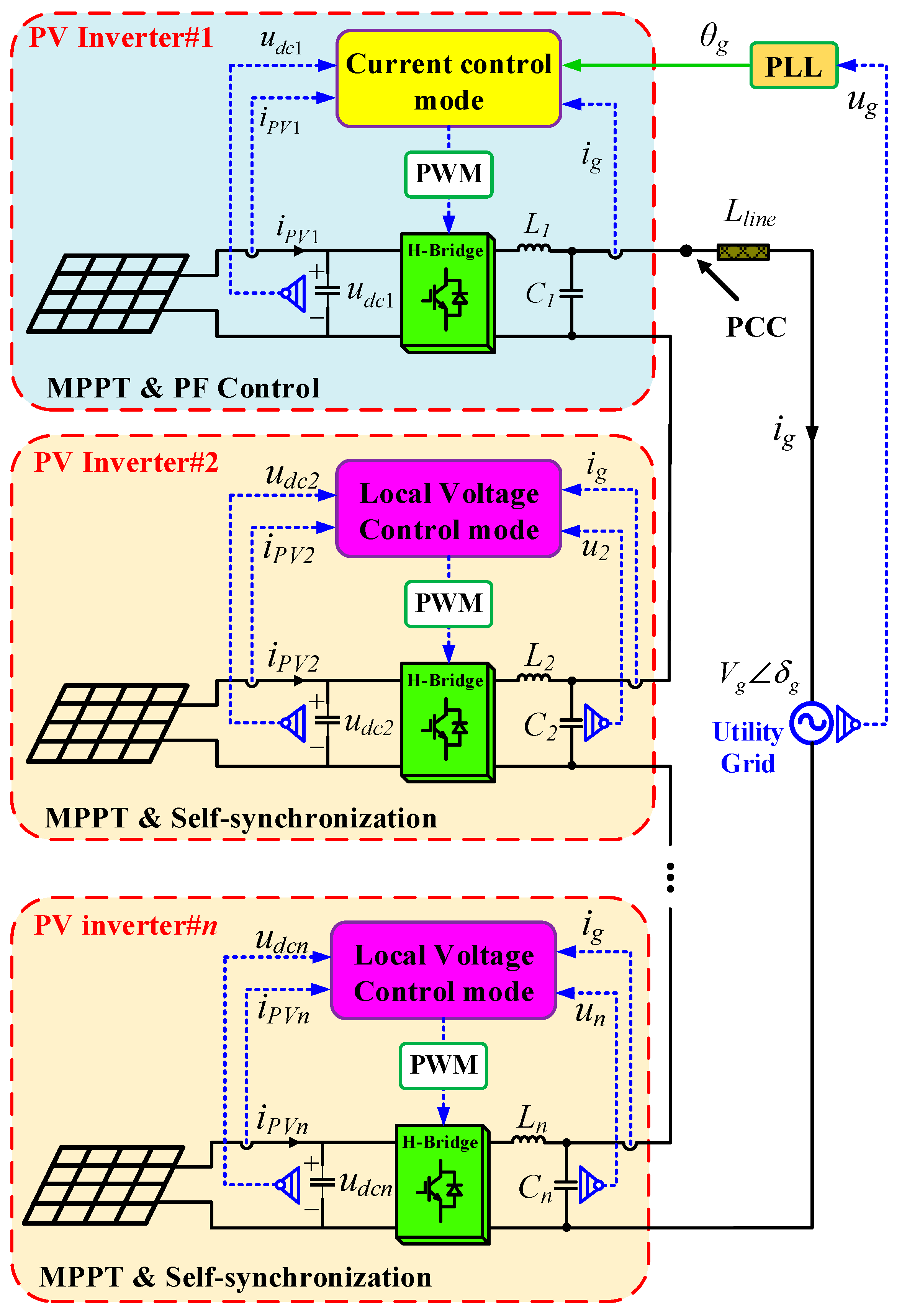
3. Proposed Decentralized Control
3.1. Schematic Overview of the Proposed Decentralized Control
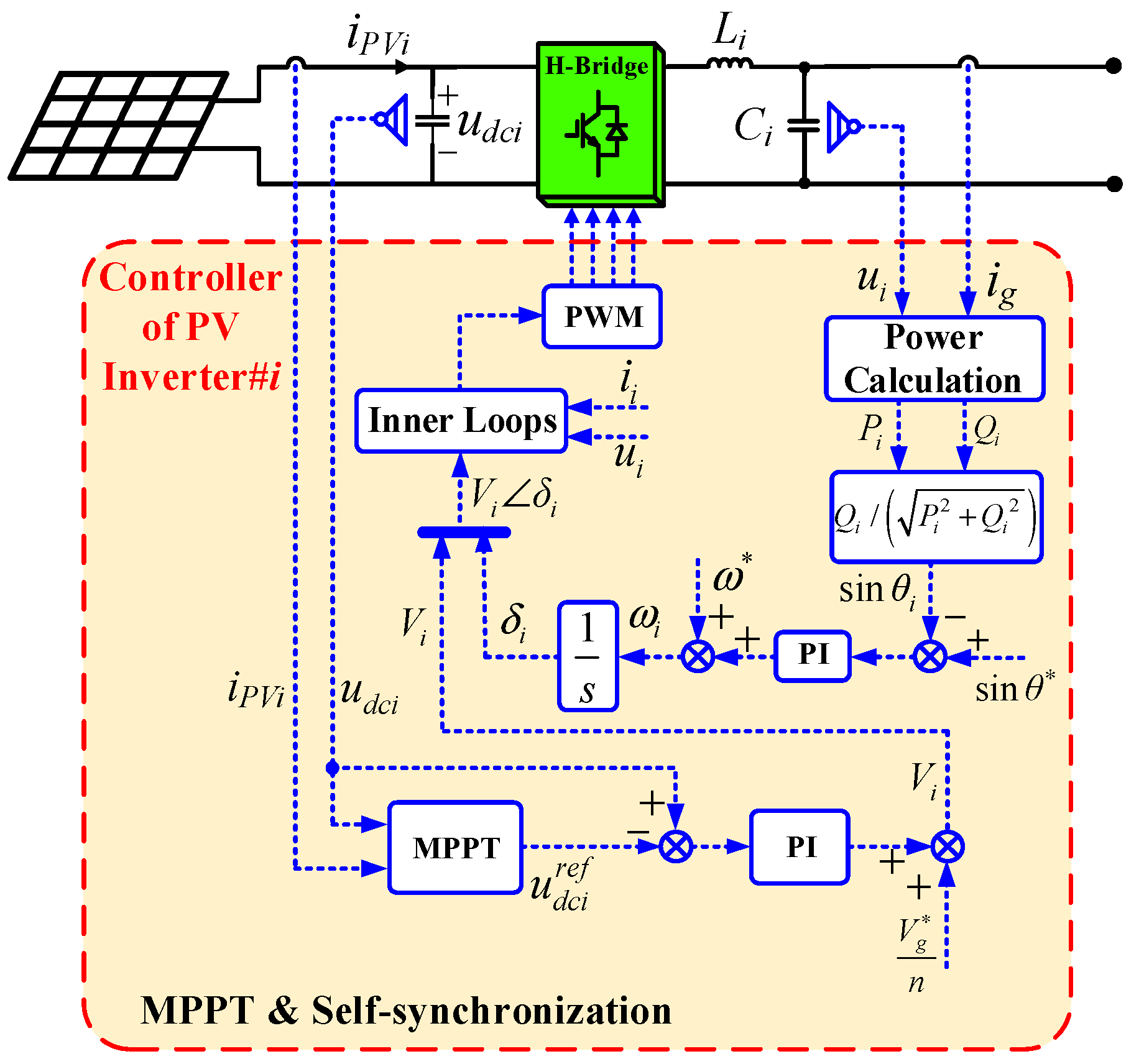
3.2. Proposed Decentralized Control
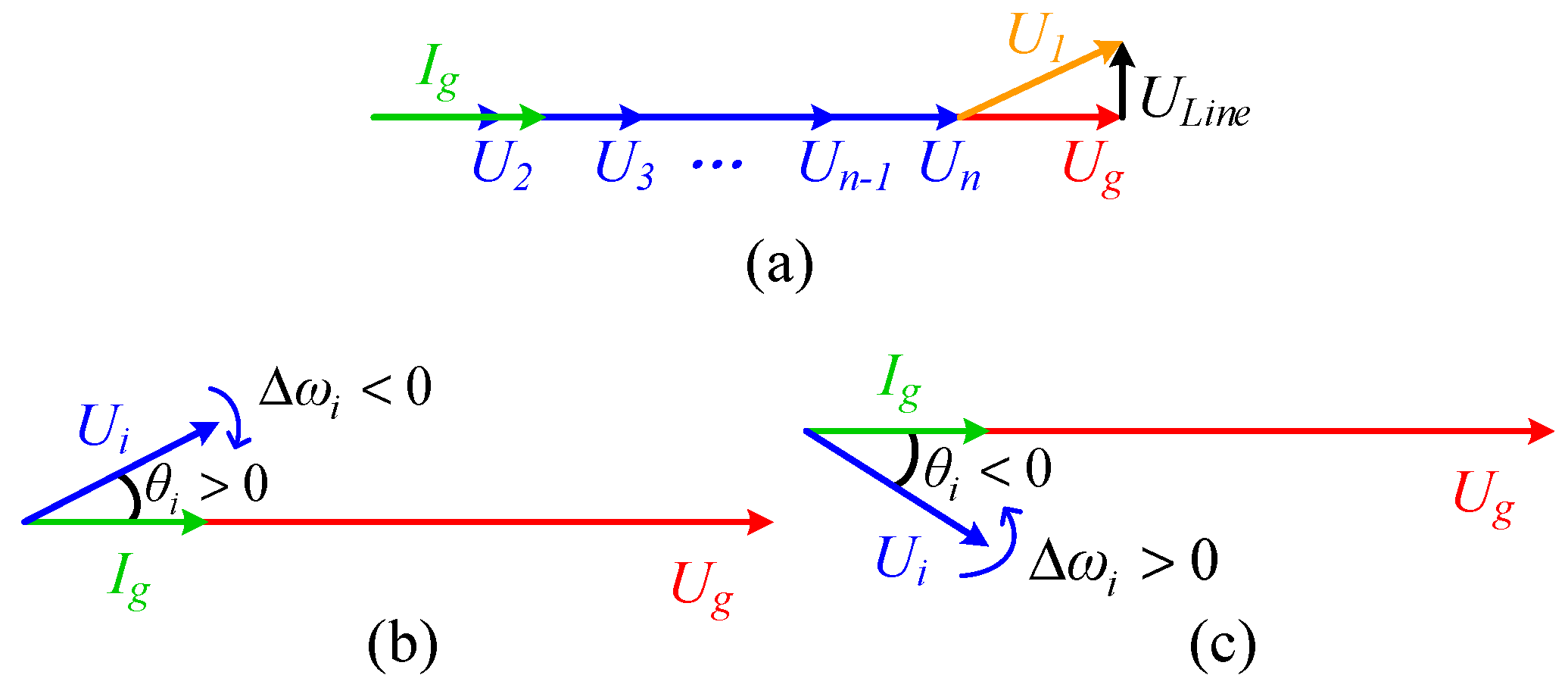
3.3. Steady-State Analysis and Self-Synchronization Mechanism
- Initially, the system is operating in steady-state. The steady-state phasor diagram is shown in Figure 5a. Output voltages of inverter#2~inverter#n, line current and the grid voltage are all in phase in a steady state. Small amount of reactive power consumed by the line impedance is compensated by inverter#1 and unity PF of this grid-connected system is ensured;
- When disturbances occur, power angle of inverter#i will change. For example, θi > 0 as shown in Figure 5b. According to Equation (6), the angular frequency reference . And thus the relative angular frequency between ui and ug is: ;
- As a result, θi will decrease until θi = 0 and self-synchronization of inverter#i is achieved;
- Similar analysis can be applied to the condition where θi < 0 occurs as shown in Figure 5c. From the analysis above, self-synchronization of ui with the grid voltage ug is achieved with the proposed control.
4. Simulation Results
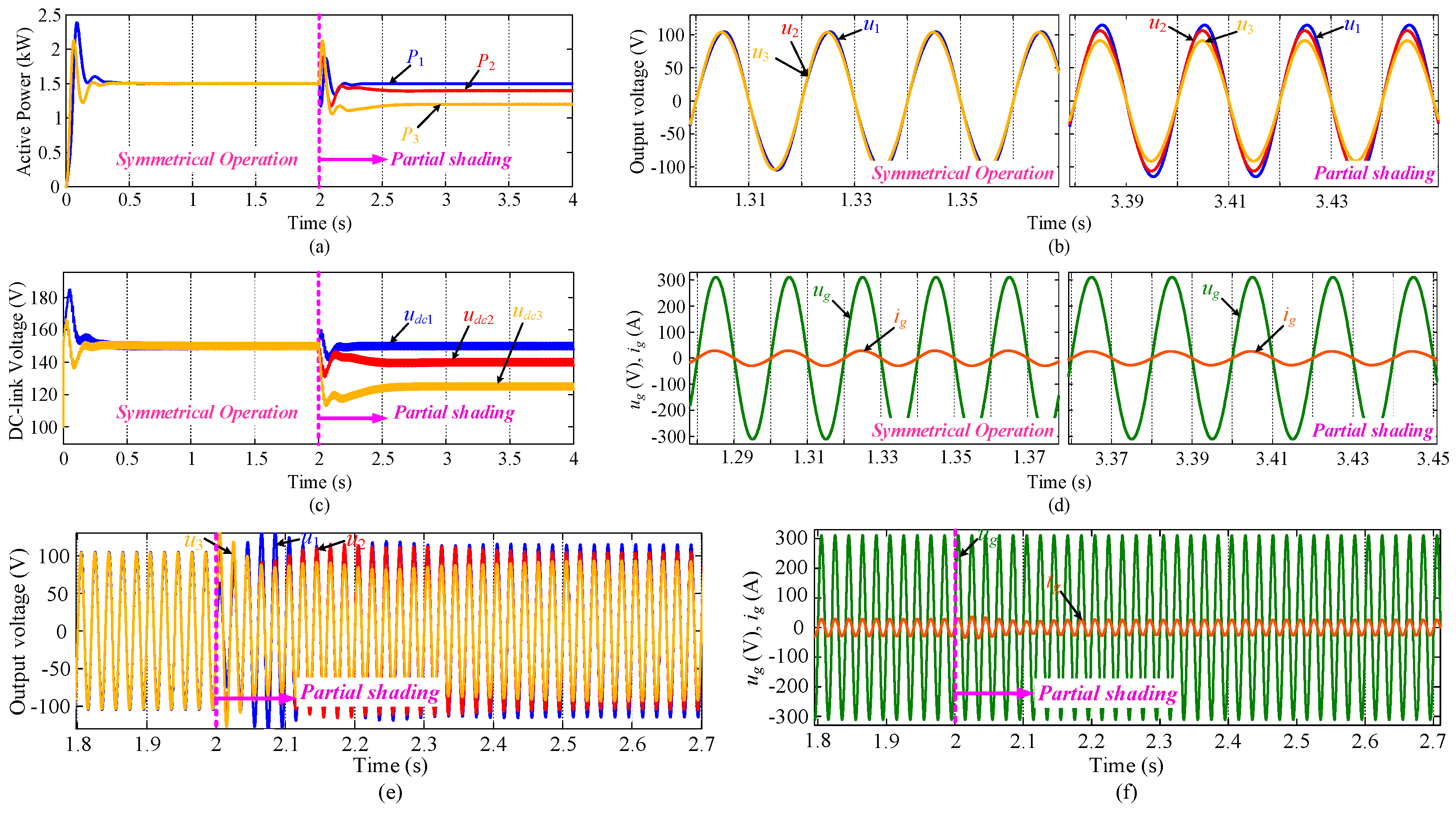
4.1. Symmetrical Condition and Partial Shading
4.2. Grid Voltage Sag Condition
4.3. Grid Frequency Fluctuation Condition
4.4. No-Unity PF Operation
5. Conclusions
- (1)
- It reduces the communication complexity to a great extent compared with existing control methods. Specifically, it reduces N − 1 communication links for a system with N inverters. Thus system reliability is greatly improved and communication cost is reduced;
- (2)
- It achieves voltage self-synchronization with grid voltage;
- (3)
- It can achieve a desirable unity PF or a required non-unity PF;
- (4)
- It achieves MPPT of all cascaded inverters under symmetrical conditions and partial shading;
- (5)
- It is available under grid voltage sag and grid frequency fluctuation.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| udci | DC-link voltage of i-th inverter |
| iPVi | PV current of i-th inverter |
| Lline | Line inductance |
| CDCi | Capacitor in DC side |
| ig | Line current |
| Grid voltage | |
| Line current reference | |
| DC-Link voltage reference | |
| θi | Power angle of i-th inverter |
| Rated grid voltage amplitude | |
| ω* | Rated grid frequency |
| Vi | Output voltage amplitude reference of i-th inverter |
| ωi | Angular frequency of i-th inverter |
| ui | Output voltage amplitude of i-th inverter |
| KPi, KIi | Proportional and integral coefficients of DC voltage controller |
| kPi, kIi | Proportional and integral coefficients of frequency controller |
References
- Hou, X.; Sun, Y.; Han, H.; Liu, Z.; Yuan, W.; Su, M. A fully decentralized control of grid-connected cascaded inverters. IEEE Trans. Power Del. 2018. [Google Scholar] [CrossRef]
- Sun, Y.; Hou, X.; Yang, J.; Han, H.; Su, M.; Guerrero, J.M. New perspectives on droop control in AC microgrid. IEEE Trans. Ind. Electron. 2017, 64, 5741–5745. [Google Scholar] [CrossRef]
- Hou, X.; Sun, Y.; Han, H.; Liu, Z.; Su, M.; Wang, B.; Zhang, X. A General Decentralized Control Scheme for Medium/High Voltage Cascaded STATCOM. IEEE Trans. Power Syst. 2018. [Google Scholar] [CrossRef]
- Liu, Z.; Su, M.; Sun, Y.; Li, L.; Han, H.; Zhang, X.; Zheng, M. Optimal criterion and global/sub-optimal control schemes of decentralized economical dispatch for AC microgrid. Int. J. Electr. Power Energy Syst. 2019, 104, 38–42. [Google Scholar] [CrossRef]
- Li, L.; Ye, H.; Sun, Y.; Han, H.; Li, X.; Su, M.; Guerrero, J.M. A communication-free economical-sharing scheme for cascaded-type microgrids. Int. J. Electr. Power Energy Syst. 2019, 104, 1–9. [Google Scholar] [CrossRef]
- Nuotio, M.; Ilic, M.; Liu, Y.; Bonanno, J.; Verlinden, P.J. Innovative AC photovoltaic module system using series connection and universal low-voltage micro inverters. In Proceedings of the 2014 IEEE 40th Photovoltaic Specialist Conference (PVSC), Denver, CO, USA, 8–13 June 2014; pp. 1367–1369. [Google Scholar]
- Bhowmik, S. Systems and Methods for Solar Photovolatic Energy Collection and Conversion. U.S. Patent 9,531,293, 27 December 2016. [Google Scholar]
- Lu, F.; Choi, B.; Maksimovic, D. Autonomous control of series-connected low voltage photovoltaic microinverters. In Proceedings of the 2015 IEEE 16th Workshop on Control and Modeling for Power Electronics (COMPEL), Vancouver, BC, Canada, 12–15 July 2015; pp. 1–6. [Google Scholar]
- Zhang, L.; Sun, K.; Li, Y.W.; Lu, X.; Zhao, J. A Distributed Power Control of Series-connected Module Integrated Inverters for PV Grid-tied Applications. IEEE Trans. Power Electron. 2017, 7698–7707. [Google Scholar] [CrossRef]
- Jafarian, H.; Cox, R.; Enslin, J.H.; Bhowmik, S.; Parkhideh, B. Decentralized Active and Reactive Power Control for an AC-Stacked PV Inverter with Single Member Phase Compensation. IEEE Trans. Ind. Appl. 2018, 54, 345–355. [Google Scholar] [CrossRef]
- Jafarian, H.; Bhowmik, S.; Parkhideh, B. Hybrid Current-/Voltage-Mode Control Scheme for Distributed AC-Stacked PV Inverter with Low-Bandwidth Communication Requirements. IEEE Trans. Ind. Electron. 2018, 65, 321–330. [Google Scholar] [CrossRef]
- He, J.; Li, Y.; Wang, C.; Pan, Y.; Zhang, C.; Xing, X. Hybrid Microgrid With Parallel- and Series-Connected Microconverters. IEEE Trans. Power Electron. 2018, 33, 4817–4831. [Google Scholar] [CrossRef]
- Hadi Amini, M.; Bahrami, S.; Kamyab, F.; Mishra, S.; Jaddivada, R.; Boroojeni, K.; Weng, P.; Xu, Y. Decomposition Methods for Distributed Optimal Power Flow: Panorama and Case Studies of the DC Model. Class. Recent Asp. Power Syst. Optim. 2018, 137–155. [Google Scholar] [CrossRef]
- Mohammadi, A.; Mehrtash, M.; Kargarian, A. Diagonal Quadratic Approximation for Decentralized Collaborative TSO+DSO Optimal Power Flow. IEEE Trans. Smart Grid. 2018, 1. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Symbol | Value |
|---|---|---|---|
| Vg | 311 V | KP2 = KP3 | 1.8 |
| ω* | 2π × 50 rad/s | KI2 = KI3 | 6 |
| sinθ* | 0 & 0.392 | kP2 = kP3 | 7 |
| Lline | 300 μH | kI2 = kI3 | 0.2 |
| CDC1= CDC2= CDC3 | 4000 μF | - | - |
| Items | Proposed Decentralized Control | Existing Control Methods |
|---|---|---|
| Number of Communication Links | 1 | N |
| Communication Cost | Low | High |
| Communication Complexity | Low | High |
| Reliability in Case of Communication Faults | High | Low |
| Synchronization Method | By Self-synchronization Mechanism | By Centralized Communication |
| Global MPPT Operation | Yes | Yes |
| Operation Under Grid Voltage Sag | Yes | Yes |
| Operation Under Grid Frequency Fluctuation | Yes | Yes |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, H.; Luo, C.; Hou, X.; Su, M.; Yuan, W.; Liu, Z.; Guerrero, J.M. A Cost-Effective Decentralized Control for AC-Stacked Photovoltaic Inverters. Energies 2018, 11, 2262. https://doi.org/10.3390/en11092262
Han H, Luo C, Hou X, Su M, Yuan W, Liu Z, Guerrero JM. A Cost-Effective Decentralized Control for AC-Stacked Photovoltaic Inverters. Energies. 2018; 11(9):2262. https://doi.org/10.3390/en11092262
Chicago/Turabian StyleHan, Hua, Chao Luo, Xiaochao Hou, Mei Su, Wenbin Yuan, Zhangjie Liu, and Josep M. Guerrero. 2018. "A Cost-Effective Decentralized Control for AC-Stacked Photovoltaic Inverters" Energies 11, no. 9: 2262. https://doi.org/10.3390/en11092262
APA StyleHan, H., Luo, C., Hou, X., Su, M., Yuan, W., Liu, Z., & Guerrero, J. M. (2018). A Cost-Effective Decentralized Control for AC-Stacked Photovoltaic Inverters. Energies, 11(9), 2262. https://doi.org/10.3390/en11092262