General Analysis of Switching Modes in a Dual Active Bridge with Triple Phase Shift Modulation

 , and
, and
Abstract
:1. Introduction
2. Triple-Phase-Shift Modulation
3. Cases and Switching Modes
3.1. Switching Modes: Case I and Case II. Boundaries
3.2. Current Through the Inductor L
3.3. Average Power
4. Soft Switching
4.1. Case I (v11 ≥ v22 and D1 > D2)
4.1.1. Non-Depending on φ
4.1.2. Depending on φ
4.2. Case II (v11 ≥ v22 and D1 ≤ D2)
4.2.1. Non-Depending on φ
4.2.2. Depending on φ
4.2.3. Extended Switching Modes
5. Experimental Results
6. Conclusions
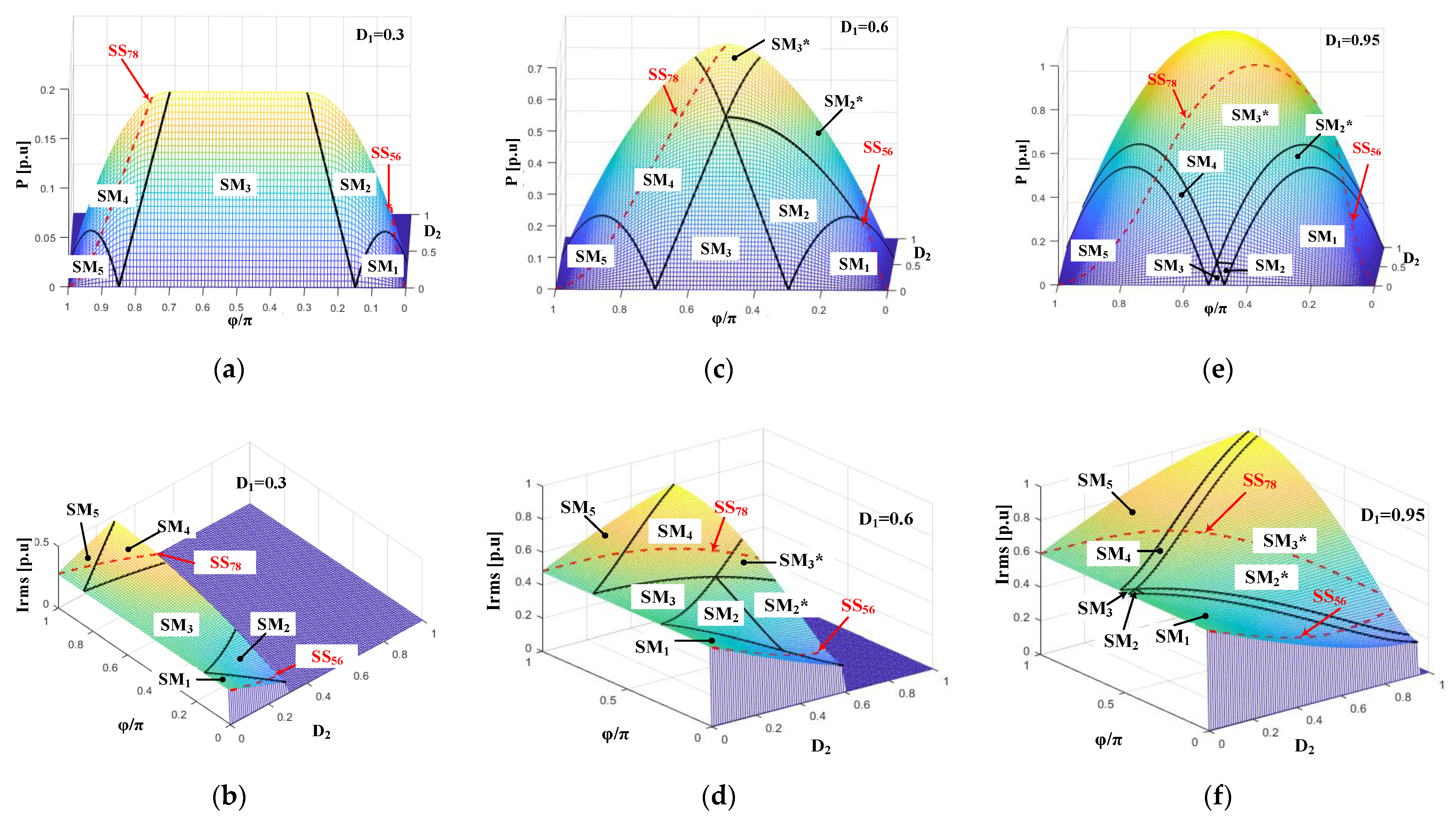
- In Case I, only three (SM3*, SM4 and SM5) of the seven switching modes can achieve ZCS or ZVS for all the switches, although the only SM3* has a minimum inductor RMS current when D1 > 0.5. The remaining switching modes (SM1, SM2, SM2*, and SM3) operate with hard switching in a leg of bridge 2, since φ < SS56 (D1, D2) or φ < SS78 (D1, D2), see Table 5, Figure 8d,f.
- In Case II, ZVS and ZCS are reached for all switching modes and the whole power range. For low and medium powers, soft switching is got by applying the expression in Equation (10) with D1 ≤ d and D2 < 1. High power is got either by operating in extending mode with D2 = 1 and D1 > d (EPS modulation), or with D2 = 1 and D1 =1 (PS modulation). For SM1, SM2, and SM2*, the lowest RMS current is obtained at the boundary between them, see Figure 10d for the same transferred power. For the highest power, SM3* achieves the lowest inductor RMS current.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| V1 | DC voltage for bridge 1. | d | Voltage ratio. |
| V2 | DC voltage for bridge 2. | vgx | Gate-source voltage for Mosfet “x”. |
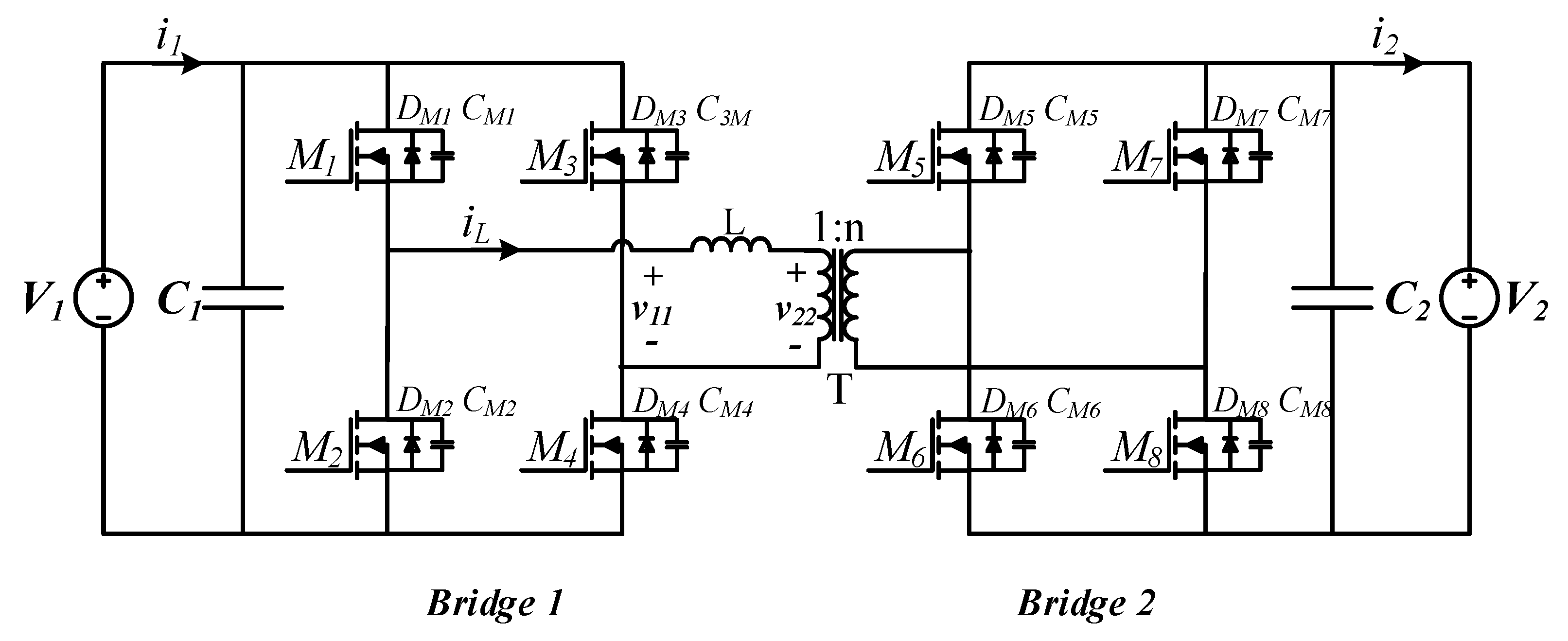
| v11 | Output voltage of the Bridge 1. | SMx | Switching mode “x”. |
| v22 | Input voltage of the Bridge 2. | Mx | Switch “x”. |
| D1 | Pulse width of v11. | SSxy | Soft switching condition for MOSFET “x” and “y”. |
| D2 | Pulse width of v22. | DAB | Dual Active Bridge. |
| φ | Phase shift between v11 and v22. | PS | Phase shift. |
| fsw | Switching frequency. | SPS | Simple Phase Shift. |
| Tsw | Switching period. | DPS | Dual Phase Shift. |
| n | Transformer turns ratio. | TPS | Triple Phase Shift. |
| L | Series inductor. | EPS | Extended Phase Shift. |
| iL | Inductor current. | ZVS | Zero voltage switching. |
| VL | Inductor voltage. | ZCS | Zero current switching. |
References
- Yu, F.; Cao, S.; Xie, Y.; Wheeler, P. Study on bidirectional-charger for electric vehicle applied to power dispatching in smart grid. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference, Hefei, China, 22–26 May 2016. [Google Scholar]
- Evzelman, M.; Ur Rehman, M.M.; Hathaway, K.; Zane, R.; Costinett, D.; Maksimovic, D. Active Balancing System for Electric Vehicles With Incorporated Low-Voltage Bus. IEEE Trans. Power Electron. 2016, 31, 7887–7895. [Google Scholar] [CrossRef]
- Xue, L.; Shen, Z.; Boroyevich, D.; Mattavelli, P.; Diaz, D. Dual Active Bridge-Based Battery Charger for Plug-in Hybrid Electric Vehicle with Charging Current Containing Low Frequency Ripple. IEEE Trans. Power Electron. 2015, 30, 7299–7307. [Google Scholar] [CrossRef]
- Mastromauro, R.A.; Poliseno, M.C.; Pugliese, S.; Cupertino, F.; Stasi, S. SiC MOSFET Dual Active Bridge converter for harsh environment applications in a more-electric-aircraft. In Proceedings of the 2015 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles (ESARS), Aachen, Germany, 3–5 March 2015. [Google Scholar]
- Tariq, M.; Maswood, A.I.; Gajanayake, C.J.; Gupta, A.K. A Lithium-ion battery energy storage system using a bidirectional isolated DC-DC converter with current mode control for More Electric Aircraft. In Proceedings of the 2016 IEEE Symposium on Computer Applications & Industrial Electronics (ISCAIE), Batu Feringghi, Malaysia, 30–31 May 2016. [Google Scholar]
- Khan, M.M.S.; Faruque, M.O. Management of hybrid energy storage systems for MVDC power system of all electric ship. In Proceedings of the 2016 North American Power Symposium (NAPS), Denver, CO, USA, 18–20 September 2016. [Google Scholar]
- Xie, R.; Shi, Y.; Li, H. Modular multilevel DAB (M2DAB) converter for shipboard MVDC system with fault protection and ride-through capability. In Proceedings of the 2015 IEEE Electric Ship Technologies Symposium (ESTS), Alexandria, VA, USA, 21–24 June 2015. [Google Scholar]
- Rico-Secades, M.; Calleja, A.; Llera, D.G.; Corominas, E.L.; Medina, N.H.; Miranda, J.C. Cosine Phase Droop Control (CPDC) for the Dual-Active Bridge in lighting smart grids applications. In Proceedings of the 2016 IEEE International Conference on Industrial Technology (ICIT), Taipei, Taiwan, 14–17 March 2016. [Google Scholar]
- Yin, C.; Wu, H.; Locment, F.; Sechilariu, M. Energy management of DC microgrid based on photovoltaic combined with diesel generator and supercapacitor. Energy Convers. Manag. 2017, 132, 14–27. [Google Scholar] [CrossRef]
- Fathabadi, H. Novel wind powered electric vehicle charging station with vehicle-to-grid (V2G) connection capability. Energy Convers. Manag. 2017, 136, 229–239. [Google Scholar] [CrossRef]
- Pires, V.F.; Romero-Cadaval, E.; Vinnikov, D.; Roasto, I.; Martins, J.F. Power converter interfaces for electrochemical energy storage systems—A review. Energy Convers. Manag. 2014, 86, 453–475. [Google Scholar] [CrossRef]
- De Bernardinis, A. Synthesis on power electronics for large fuel cells: From power conditioning to potentiodynamic analysis technique. Energy Convers. Manag. 2014, 84, 174–185. [Google Scholar] [CrossRef]
- Amin, A.; Shousha, M.; Prodic, A.; Lynch, B. A transformerless dual active half-bridge DC-DC converter for point-of-load power supplies. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 133–140. [Google Scholar]
- Alonso, A.R.; Sebastian, J.; Lamar, D.G.; Hernando, M.M.; Vazquez, A. An overall study of a Dual Active Bridge for bidirectional DC/DC conversion. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 1129–1135. [Google Scholar]
- Zhao, B.; Yu, Q.; Sun, W. Extended-Phase-Shift Control of Isolated Bidirectional DC–DC Converter for Power Distribution in Microgrid. IEEE Trans. Power Electron. 2012, 27, 4667–4680. [Google Scholar] [CrossRef]
- Wen, H.; Su, B. Operating modes and practical power flow analysis of bidirectional isolated power interface for distributed power systems. Energy Convers. Manag. 2016, 111, 229–238. [Google Scholar] [CrossRef]
- Lei, T.; Wu, C.; Liu, X. Multi-Objective Optimization Control for the Aerospace Dual-Active Bridge Power Converter. Energies 2018, 11, 1168. [Google Scholar] [CrossRef]
- Sun, C.; Li, X. Fast Transient Modulation for a Step Load Change in a Dual-Active-Bridge Converter with Extended-Phase-Shift Control. Energies 2018, 11, 1569. [Google Scholar] [CrossRef]
- Oggier, G.G.; GarcÍa, G.O.; Oliva, A.R. Switching Control Strategy to Minimize Dual Active Bridge Converter Losses. IEEE Trans. Power Electron. 2009, 24, 1826–1838. [Google Scholar] [CrossRef]
- Liu, X.; Zhu, Z.Q.; Stone, D.A.; Foster, M.P.; Chu, W.Q.; Urquhart, I.; Greenough, J. Novel Dual-Phase-Shift Control With Bidirectional Inner Phase Shifts for a Dual-Active-Bridge Converter Having Low Surge Current and Stable Power Control. IEEE Trans. Power Electron. 2017, 32, 4095–4106. [Google Scholar] [CrossRef]
- Malek, M.H.A.B.A.; Kakigano, H. Fundamental study on control strategies to increase efficiency of dual active bridge DC-DC converter. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 1073–1078. [Google Scholar]
- Calderon, C.; Barrado, A.; Rodriguez, A.; Lazaro, A.; Fernandez, C.; Zumel, P. Dual active bridge with triple phase shift by obtaining soft switching in all operating range. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 1739–1744. [Google Scholar]
- Calderon, C.; Barrado, A.; Rodriguez, A.; Lazaro, A.; Sanz, M.; Olias, E. Dual active bridge with triple phase shift, soft switching and minimum RMS current for the whole operating range. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 4671–4676. [Google Scholar]
- Chakraborty, S.; Tripathy, S.; Chattopadhyay, S. Minimum RMS current operation of the dual-active half-bridge converter using three degree of freedom control. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- Harrye, Y.A.; Ahmed, K.; Adam, G.; Aboushady, A. Comprehensive steady state analysis of bidirectional dual active bridge DC/DC converter using triple phase shift control. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 437–442. [Google Scholar]
- Huang, J.; Wang, Y.; Li, Z.; Lei, W. Unified Triple-Phase-Shift Control to Minimize Current Stress and Achieve Full Soft-Switching of Isolated Bidirectional DC–DC Converter. IEEE Trans. Ind. Electron. 2016, 63, 4169–4179. [Google Scholar] [CrossRef]
- Xiong, F.; Wu, J.; Hao, L.; Liu, Z. Backflow power optimization control for dual active bridge DC-DC converters. Energies 2017, 10, 1403. [Google Scholar] [CrossRef]
- Krismer, F.; Kolar, J.W. Closed form solution for minimum conduction loss modulation of DAB converters. IEEE Trans. Power Electron. 2012, 27, 174–188. [Google Scholar] [CrossRef]
- Everts, J. Closed-Form Solution for Efficient ZVS Modulation of DAB Converters. IEEE Trans. Power Electron. 2017, 32, 7561–7576. [Google Scholar] [CrossRef]
- Riedel, J.; Holmes, D.G.; McGrath, B.P.; Teixeira, C. Maintaining Continuous ZVS Operation of a Dual Active Bridge by Reduced Coupling Transformers. IEEE Trans. Ind. Electron. 2018, 65, 9438–9448. [Google Scholar] [CrossRef]
- Zhao, B.; Song, Q.; Liu, W.; Sun, Y. Dead-Time Effect of the High-Frequency Isolated Bidirectional Full-Bridge DC–DC Converter: Comprehensive Theoretical Analysis and Experimental Verification. IEEE Trans. Power Electron. 2014, 29, 1667–1680. [Google Scholar] [CrossRef]
- Li, J.; Chen, Z.; Shen, Z.; Mattavelli, P.; Liu, J.; Boroyevich, D. An adaptive dead-time control scheme for high-switching-frequency dual-active-bridge converter. In Proceedings of the 2012 Twenty-Seventh Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 February 2012; pp. 1355–1361. [Google Scholar]
- Xu, F.; Zhao, F.; Shi, Q.; Wen, X. Researches on the Output Power Range of ZVS of Dual Active Bridge Isolated DC-DC Converters. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Bangkok, Thailand, 6–9 June 2018; pp. 1–5. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SMi | Case I | Case II |
|---|---|---|
| SM1 | ||
| SM2 | ||
| SM2* | ||
| SM3 | ||
| SM3* | ||
| SM4 | ||
| SM5 |
| SMi | Current | Power | ||
|---|---|---|---|---|
| Case I | Case II | Case I | Case II | |
| SM1 | ||||
| SM2 | ||||
| SM3 | ||||
| SM4 | ||||
| SM5 | ||||
| Switch | ZVS | ZCS |
|---|---|---|
| M1 | iL(t1LH) < 0 | iL(t1LH + Tsw/2) = 0 |
| M2 | iL(t1LH + Tsw/2) > 0 | iL(t1LH) = 0 |
| M3 | iL(t1HL) > 0 | iL(t1HL + Tsw/2) = 0 |
| M4 | iL(t1HL + Tsw/2) < 0 | iL(t1HL) = 0 |
| M5 | iL(t2LH) > 0 | iL(t2LH + Tsw/2) = 0 |
| M6 | iL(t2LH + Tsw/2) < 0 | iL(t2LH) = 0 |
| M7 | iL(t2HL) < 0 | iL(t2HL + Tsw/2) = 0 |
| M8 | iL(t2HL + Tsw/2) > 0 | iL(t2HL) = 0 |
| SMi | Switch | |||||||
|---|---|---|---|---|---|---|---|---|
| M1 | M2 | M3 | M4 | M5 | M6 | M7 | M8 | |
| SM1 | ||||||||
| SM2 | ||||||||
| SM2* | ||||||||
| SM3 | ||||||||
| SM3* | ||||||||
| SM4 | 0 | |||||||
| SM5 | ||||||||
| SMi | Range | Condition | Type of Switching | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| M1 | M2 | M3 | M4 | M5 | M6 | M7 | M8 | |||
| SM1 | ZVS | ZVS | ZVS φ/π > SS56 (D2,d) ZCS φ/π = SS56 (D2,d) HS φ/π < SS56 (D2,d) | HS | ||||||
| SM2 | ||||||||||
| SM2* | ||||||||||
| SM3 | Always fulfil | ZVS | ||||||||
| SM3* | ZVS φ/π > SS56 (D2,d) ZCS φ/π = SS56 (D2,d) HS φ/π < SS56 (D2,d) | ZVS φ/π > SS78 (D2,d) ZCS φ/π = SS78 (D2,d) HS φ/π < SS78 (D2,d) | ||||||||
| SM4 | ZVS | |||||||||
| SM5 | ||||||||||
| SMi | Switch | |||||||
|---|---|---|---|---|---|---|---|---|
| M1 | M2 | M3 | M4 | M5 | M6 | M7 | M8 | |
| SM1 | ||||||||
| SM2 | ||||||||
| SM2* | ||||||||
| SM3 | ||||||||
| SM3* | ||||||||
| SM4 | ||||||||
| SM5 | ||||||||
| SMi | Case II |
|---|---|
| SM1 | |
| SM3* | |
| SM5 |
| SMi | Range | Power | Type of Switching | ||||
|---|---|---|---|---|---|---|---|
| M1–M2 | M3–M4 | M5–M6 | M7–M8 | ||||
| D1 ≤ d D2 = D1/d | SM1 | ZVS | ZVS | ZCS | ZCS | ||
| ZCS | |||||||
| SM2 | ZVS | ||||||
| SM2* | |||||||
| SM3 | |||||||
| SM3* | ZVS | ZVS | |||||
| SM4 | |||||||
| SM5 | |||||||
| D1 > d D2 = 1 | SM1 | ZVS | ZVS | HS | HS | ||
| SM3* | |||||||
| ZCS | ZCS | ||||||
| ZVS | ZVS | ||||||
| SM5 | |||||||
| Descriptions | Specifications |
|---|---|
| Port 1 Voltage V1 | 36 V |
| Port 2 Voltage V2 | 72 V |
| Transformer turns ratio: 1:n | 1:3 |
| Inductance: L | 3.88 μH |
| Switching frequency: fsw | 100 kHz |
| Port 1 capacitor: C1 | 60 μF |
| Port 2 capacitor: C2 | 60 μF |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Calderon, C.; Barrado, A.; Rodriguez, A.; Alou, P.; Lazaro, A.; Fernandez, C.; Zumel, P. General Analysis of Switching Modes in a Dual Active Bridge with Triple Phase Shift Modulation. Energies 2018, 11, 2419. https://doi.org/10.3390/en11092419
Calderon C, Barrado A, Rodriguez A, Alou P, Lazaro A, Fernandez C, Zumel P. General Analysis of Switching Modes in a Dual Active Bridge with Triple Phase Shift Modulation. Energies. 2018; 11(9):2419. https://doi.org/10.3390/en11092419
Chicago/Turabian StyleCalderon, Carlos, Andres Barrado, Alba Rodriguez, Pedro Alou, Antonio Lazaro, Cristina Fernandez, and Pablo Zumel. 2018. "General Analysis of Switching Modes in a Dual Active Bridge with Triple Phase Shift Modulation" Energies 11, no. 9: 2419. https://doi.org/10.3390/en11092419
APA StyleCalderon, C., Barrado, A., Rodriguez, A., Alou, P., Lazaro, A., Fernandez, C., & Zumel, P. (2018). General Analysis of Switching Modes in a Dual Active Bridge with Triple Phase Shift Modulation. Energies, 11(9), 2419. https://doi.org/10.3390/en11092419