Water Hammer Control Analysis of an Intelligent Surge Tank with Spring Self-Adaptive Auxiliary Control System


Abstract
:1. Introduction
2. Intelligent Surge Tank with Self-Adaptive Auxiliary Control (SAC)
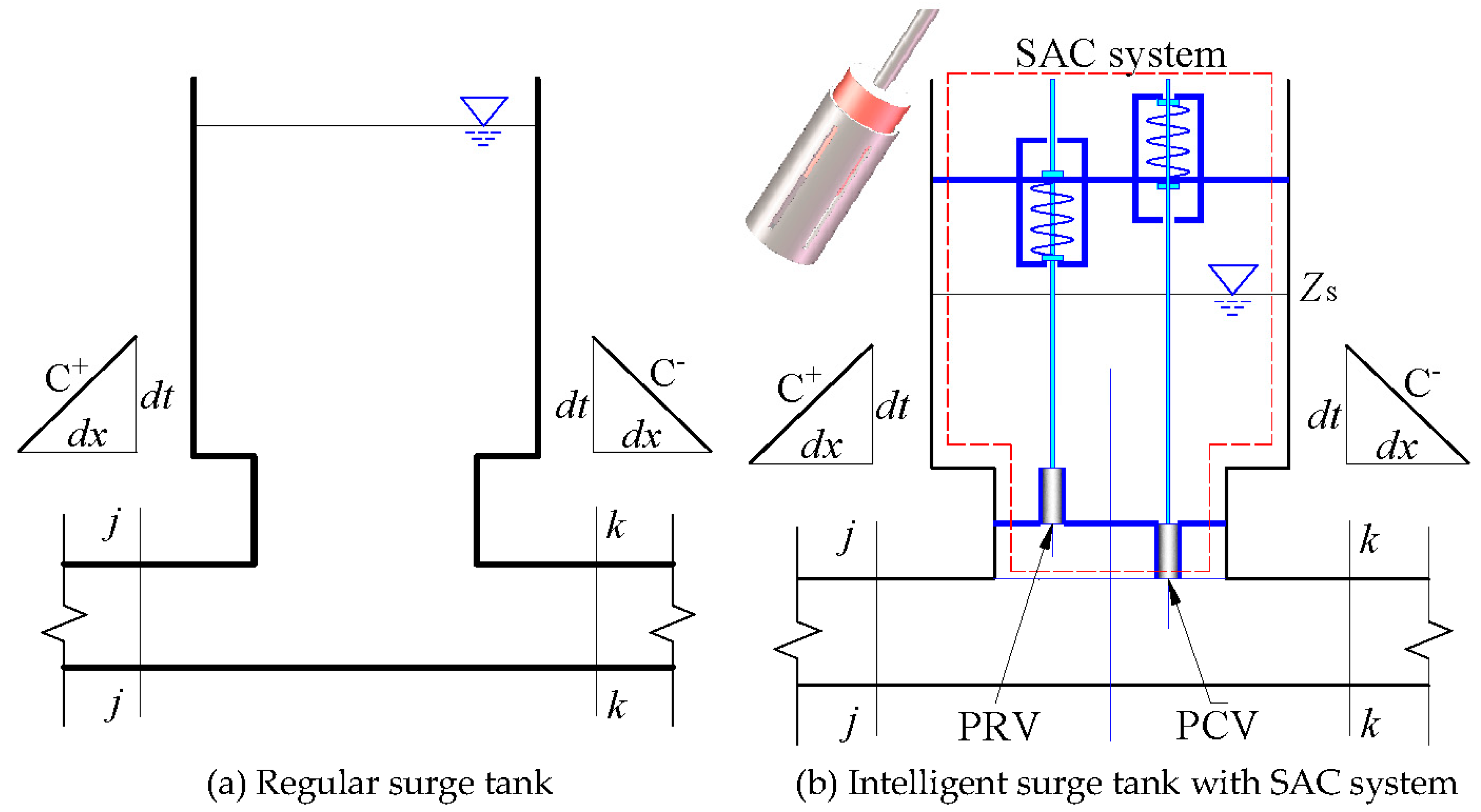
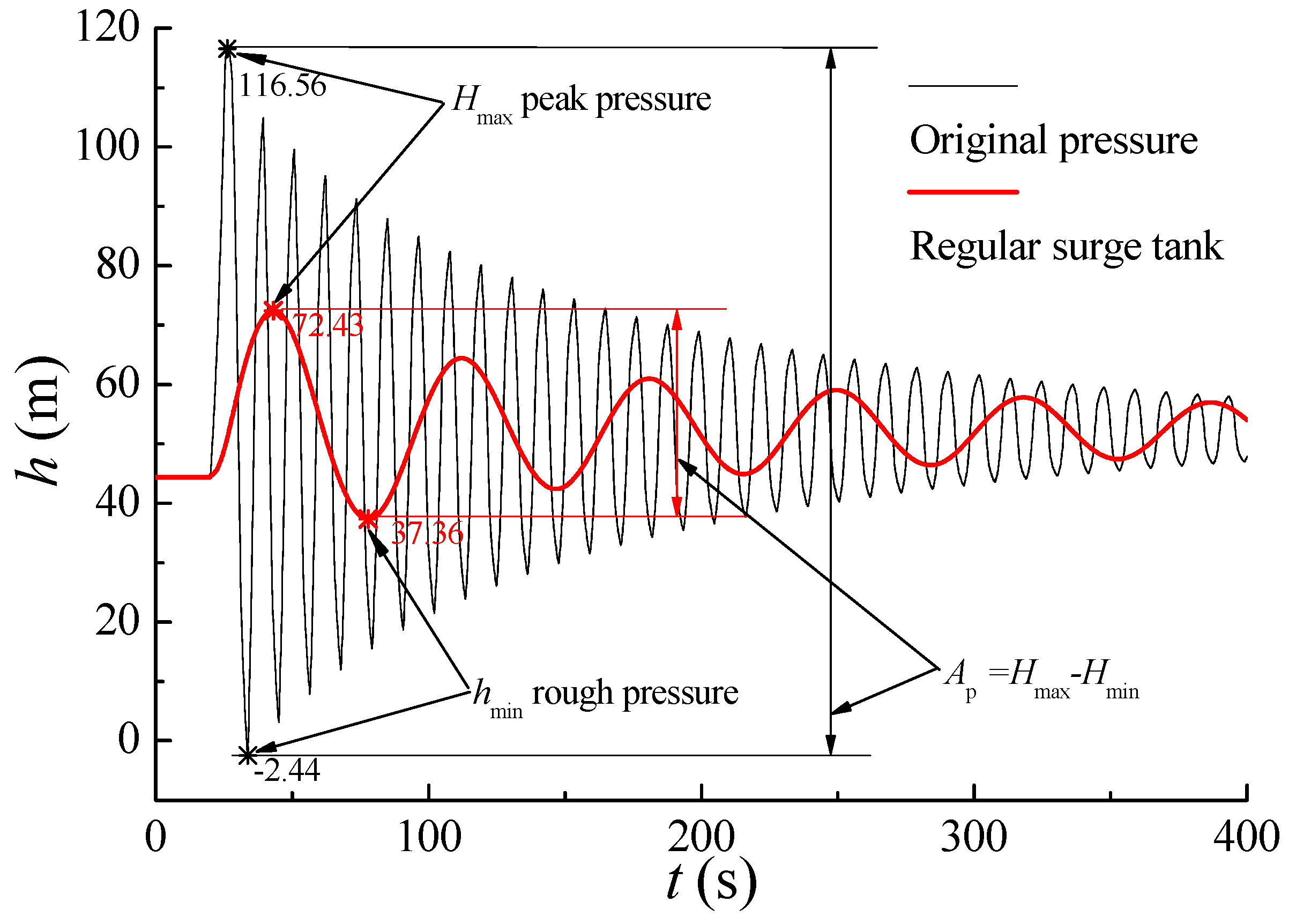
2.1. Basic Properties of a Regular Surge Tank
2.2. Self-Adaptive Auxiliary Control (SAC) Systems
3. Model for Intelligent Surge Tank with SAC System
3.1. Basic Control Equation and Solving Model for Closed Pipe Flow
3.2. Model for Surge Tank with SAC System
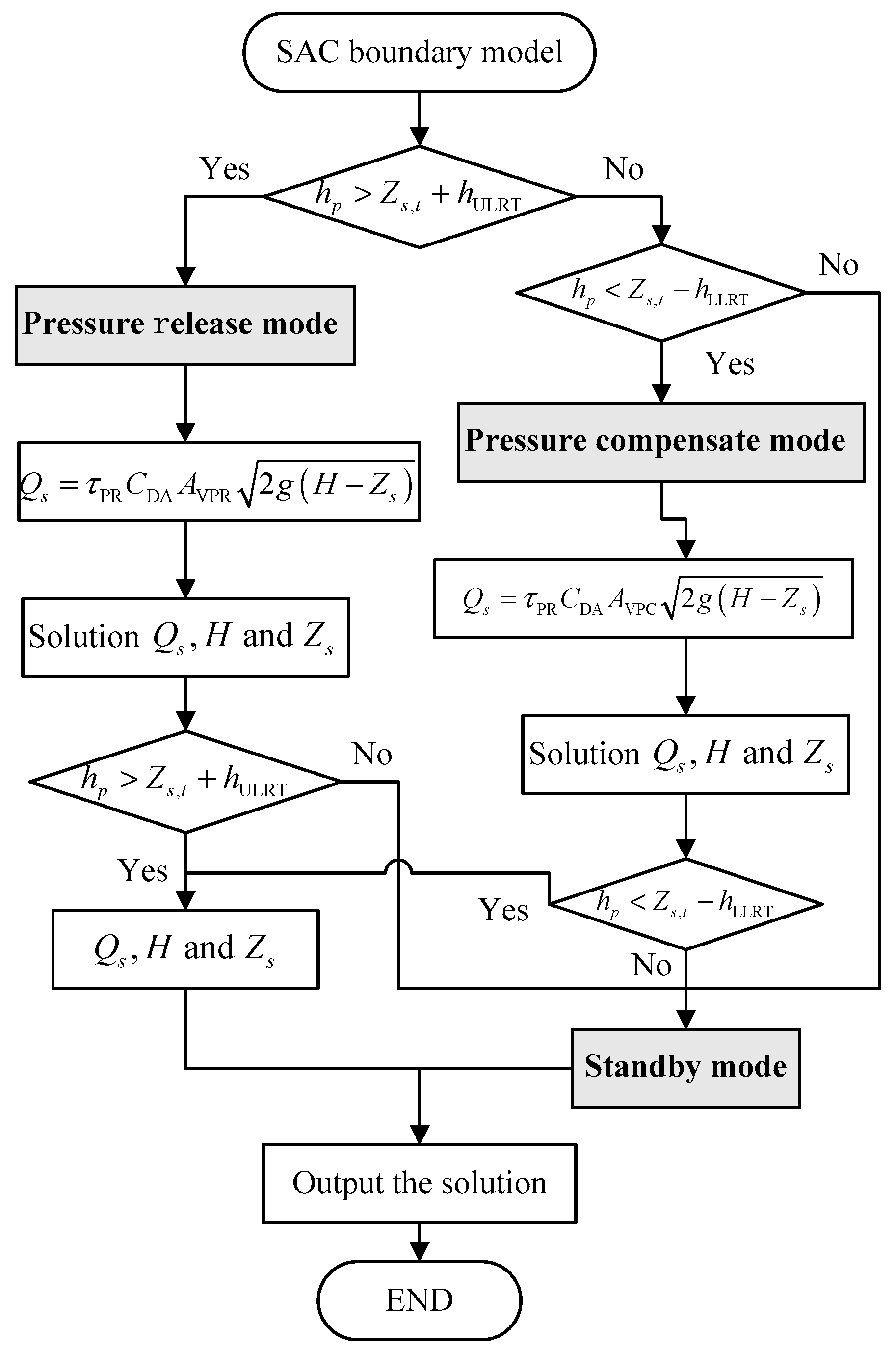
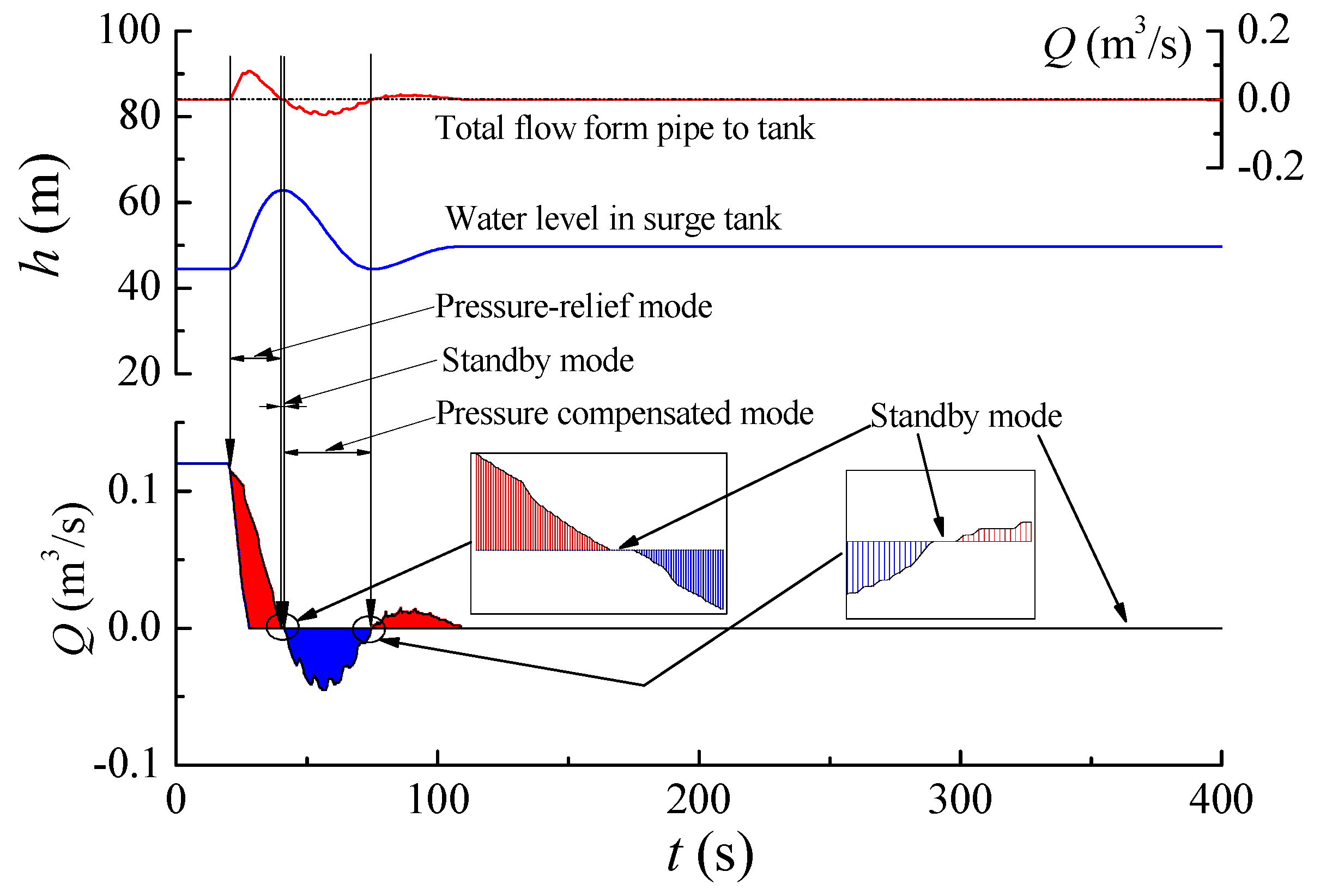
3.2.1. Response Modes of the SAC System
3.2.2. Standby Mode
3.2.3. Pressure Release Mode
3.2.4. Pressure Compensate Mode
3.3. Boundary Conditions
3.3.1. Inlet Reservoir Boundary Condition
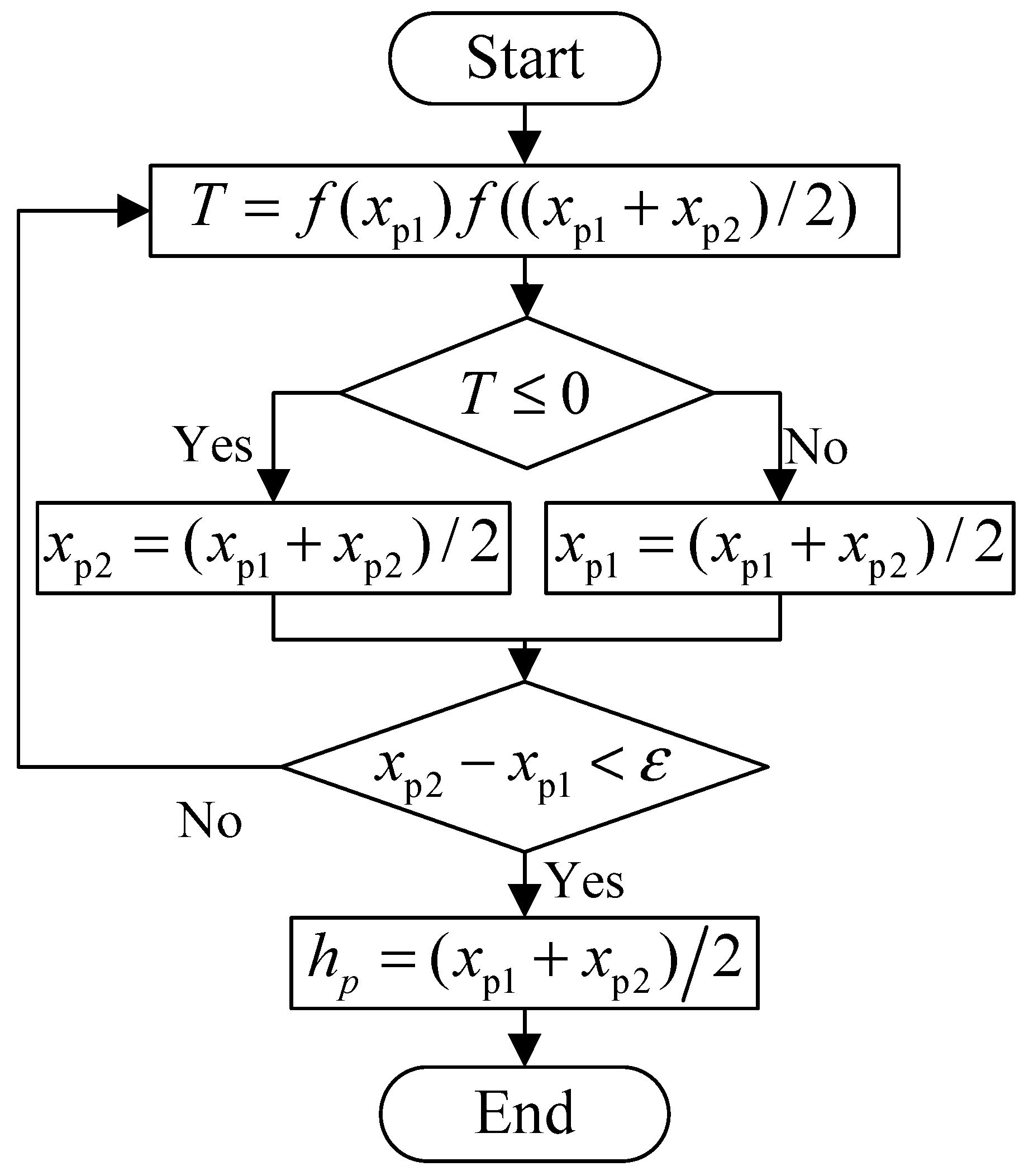
3.3.2. Valve Boundary Control Equation
3.4. Initial State Conditions
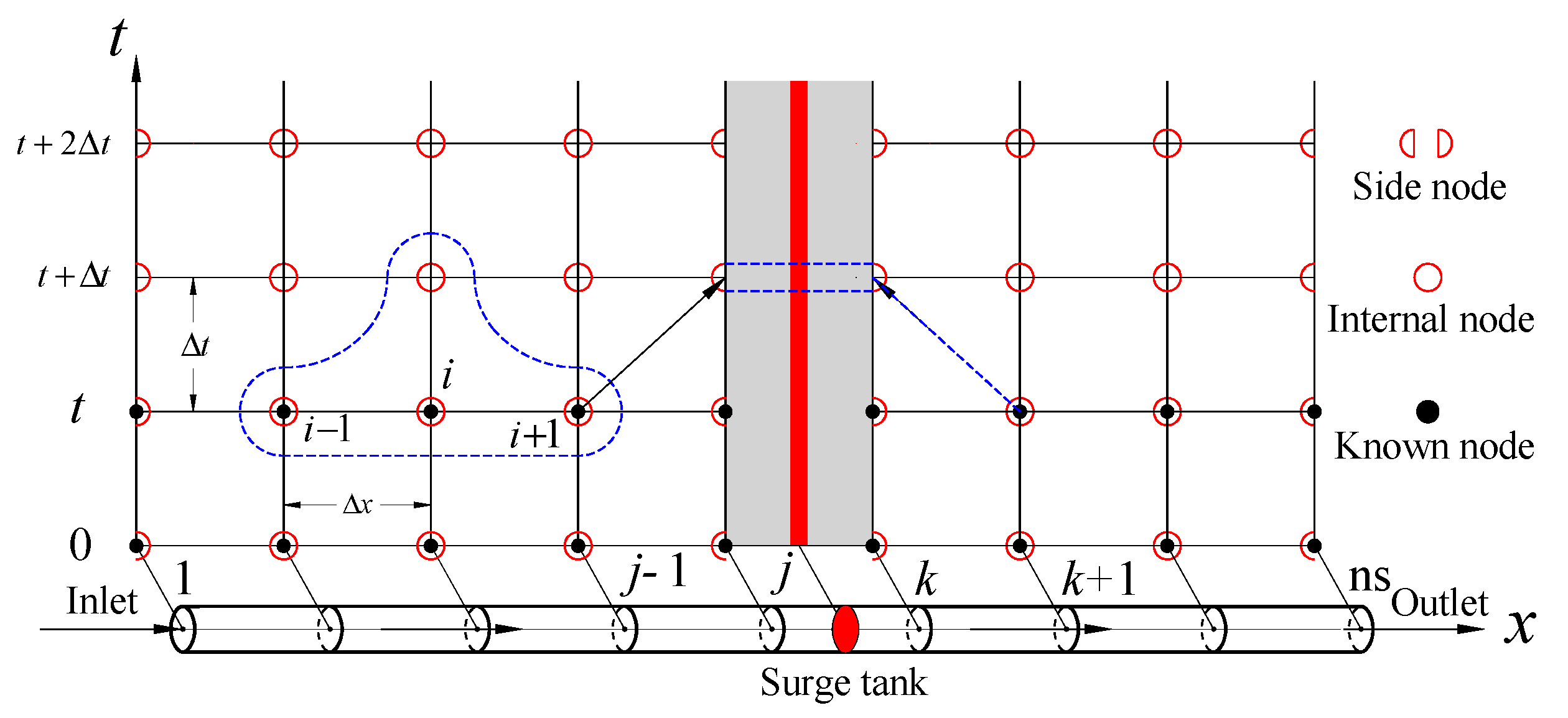
3.5. Discrete Grid
4. Simulation and Result Analysis
4.1. The Response Principle of the Surge Tank without SAC
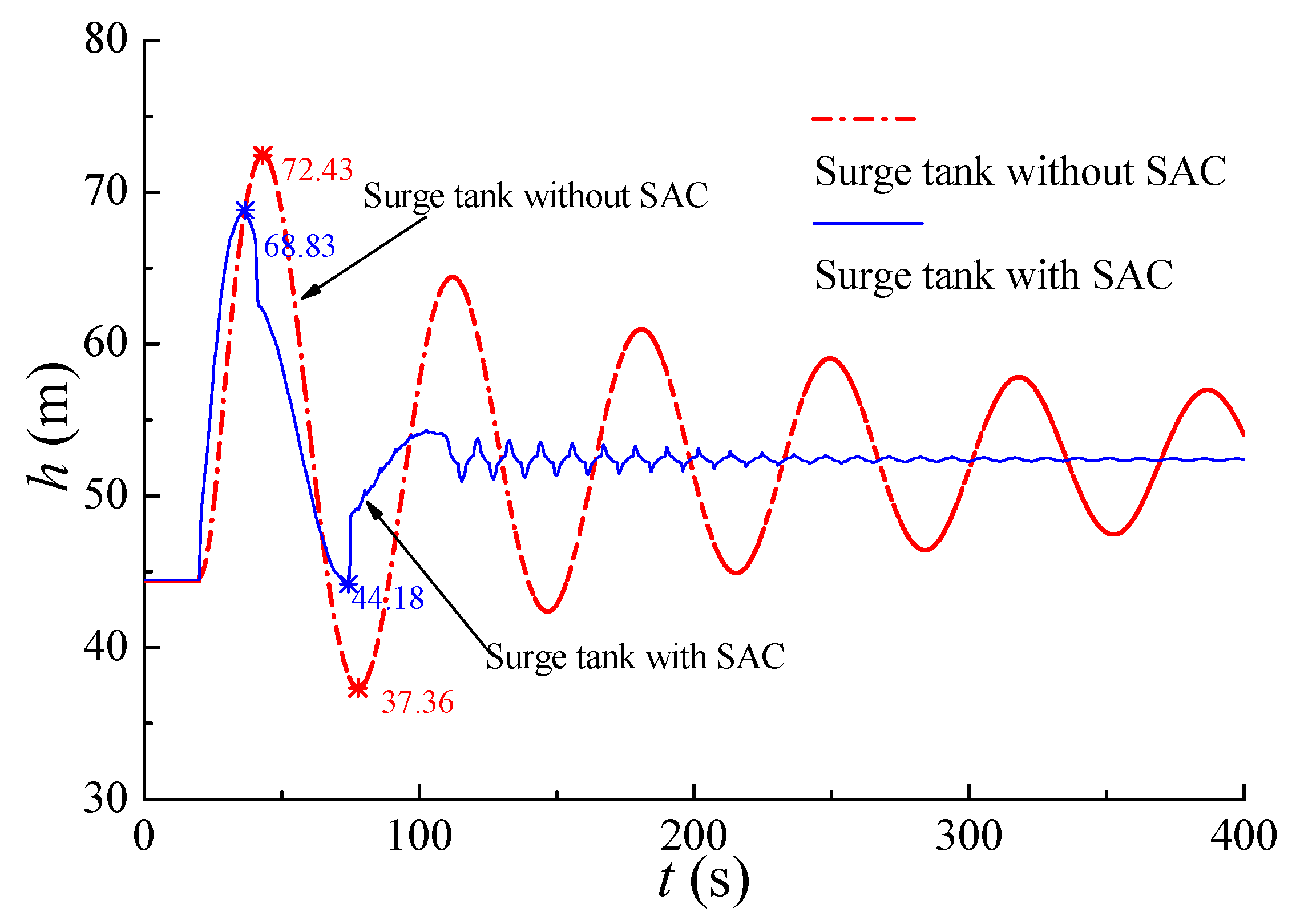
4.2. Improved Surge Tank by a SAC
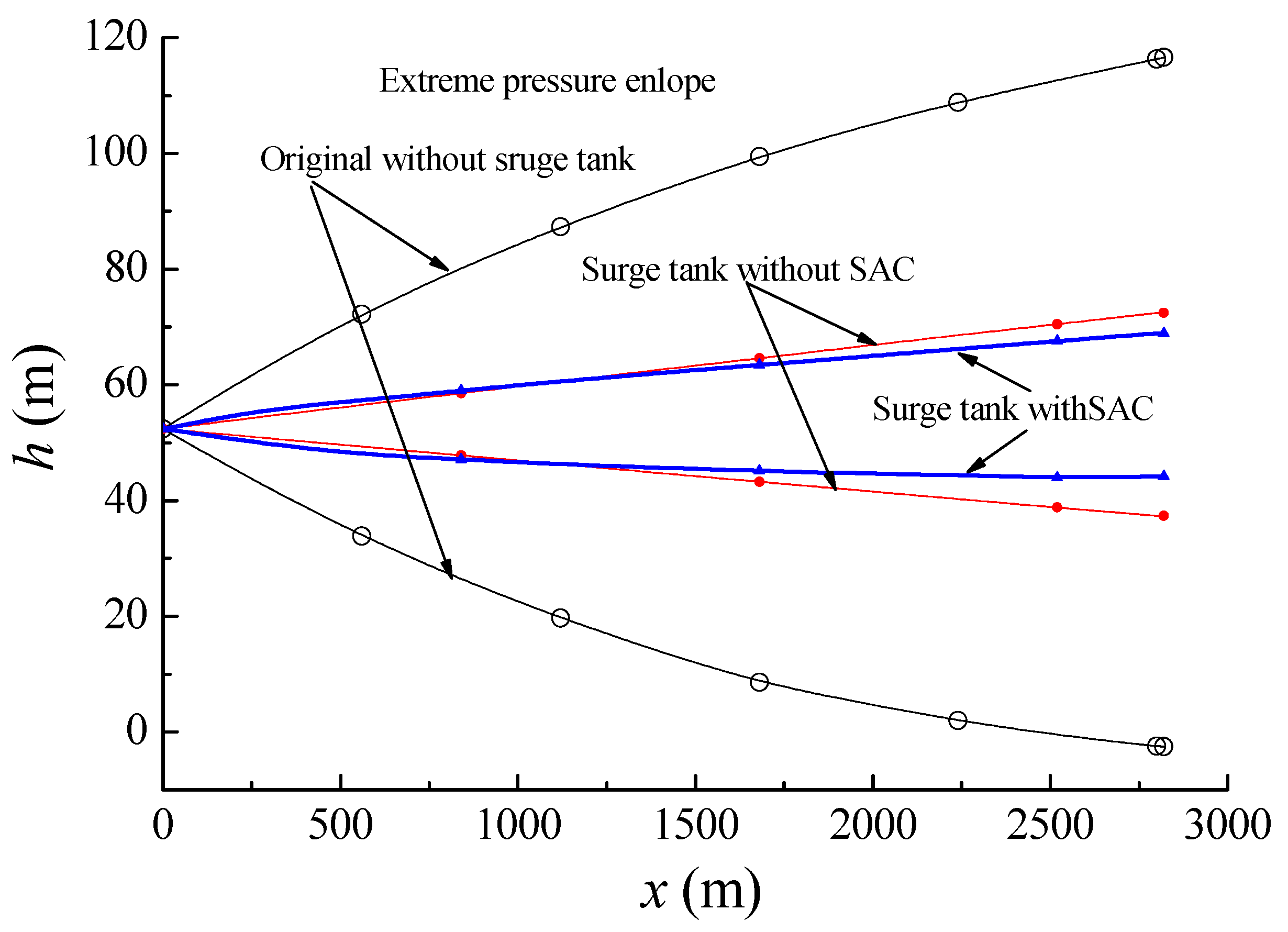
4.3. Results and Verification
5. Analysis and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| water level of the upstream reservoir (m) | |
| name for forward characteristic line | |
| name for reverse characteristic line | |
| serial number of nodes | |
| serial number of nodes | |
| pressure head (m) | |
| time, as subscript to denote time (s) | |
| flow velocity (m/s) | |
| distance along pipe from the inlet (m) | |
| wave speed of water hammer (m/s) | |
| acceleration of gravity (m/s2) | |
| pipe slope | |
| Darcy–Weisbach friction factor | |
| main pipe diameter (m) | |
| Quasi steady friction factor | |
| Brunone friction coefficient | |
| Vardy’s shear decay coefficient | |
| time interval step (s) | |
| serial number of nodes | |
| discharge in section (m3/s) | |
| length of element, space interval step (m) | |
| pipeline characteristic impedance | |
| pipeline resistance coefficient | |
| known constant in compatibility equations | |
| instantaneous discharge at a section (m3/s) | |
| known constant in compatibility equations | |
| the pressure head in the intelligent surge tank (m) | |
| the water level in the surge tank (m) | |
| the cross-sectional area of the surge tank (m2) | |
| instantaneous discharge of the surge tank (m3/s) | |
| upper latency response threshold (m) | |
| lower latency response threshold (m) | |
| cylinder’s opening ratio | |
| , | discharge coefficient of release valve |
| , | Spring orifice coefficient |
| , | nominal area of release valve orifice |
| length of main pipe (m) | |
| constant | |
| the head of the valve (m) | |
| flow velocity of the valve (m/s) | |
| area of main pipe in initial steady state (m2) | |
| length of main pipe (m) | |
| the number of elements in a single pipe | |
| water lever of the upstream reservoir (m) | |
| time of closing valve (s) | |
| the sectional area of the SAC surge tank (m2) | |
| peak pressure head (m) | |
| trough pressure head (m) | |
| the amplitude of water mass oscillation (m) | |
| lower response threshold (m) | |
| upper response threshold (m) | |
| assigned precision control |
Symbols
| superscript denotes estimated values | |
| superscript denotes average values |
Acronyms
| LLRT | lower latency response threshold |
| LTV | lower threshold value |
| MOC | method of characteristics |
| MTMS | MacCormack time marching scheme |
| PCM | Pressure compensate mode |
| PCV | spring-sleeve pressure compensator valve |
| PRM | Pressure release mode |
| PRV | spring-sleeve pressure release valve |
| SAC | self-adaptive auxiliary control |
| SM | Standby mode |
| ULRT | upper latency response threshold |
| UTV | upper threshold value |
References
- Wylie, E.B.; Streeter, V.L. Fluid Transients; McGraw-Hill International Book Co.: New York, NY, USA, 1978. [Google Scholar]
- Wan, W.; Huang, W. Investigation on complete characteristics and hydraulic transient of centrifugal pump. J. Mech. Sci. Technol. 2011, 25, 2583–2590. [Google Scholar] [CrossRef]
- Hur, J.; Kim, S.; Kim, H. Water hammer analysis that uses the impulse response method for a reservoir-pump pipeline system. J. Mech. Sci. Technol. 2017, 31, 4833–4840. [Google Scholar] [CrossRef]
- Kim, S.G.; Lee, K.B.; Kim, K.Y. Water hammer in the pump-rising pipeline system with an air chamber. J. Hydrodyn. 2014, 26, 960–964. [Google Scholar] [CrossRef]
- Rohani, M.; Afshar, M.H. Simulation of transient flow caused by pump failure: Point-Implicit Method of Characteristics. Ann. Nucl. Energy 2010, 37, 1742–1750. [Google Scholar] [CrossRef]
- Guo, W.C.; Yang, J.D.; Teng, Y. Surge wave characteristics for hydropower station with upstream series double surge tanks in load rejection transient. Renew. Energy 2017, 108, 488–501. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, J.; Chen, S.; Yu, X. Investigation on Maximum Upsurge and Air Pressure of Air Cushion Surge Chamber in Hydropower Stations. J. Press. Vessel Technol. 2017, 139, 031603. [Google Scholar] [CrossRef]
- Riasi, A.; Tazraei, P. Numerical analysis of the hydraulic transient response in the presence of surge tanks and relief valves. Renew. Energy 2017, 107, 138–146. [Google Scholar] [CrossRef] [Green Version]
- Duan, H.F.; Tung, Y.K.; Ghidaoui, M.S. Probabilistic Analysis of Transient Design for Water Supply Systems. J. Water Resour. Plan. Manag. 2010, 136, 678–687. [Google Scholar] [CrossRef]
- Kim, S.H. Design of surge tank for water supply systems using the impulse response method with the GA algorithm. J. Mech. Sci. Technol. 2010, 24, 629–636. [Google Scholar] [CrossRef]
- Zhang, B.R.; Wan, W.Y.; Shi, M.S. Experimental and Numerical Simulation of Water Hammer in Gravitational Pipe Flow with Continuous Air Entrainment. Water 2018, 10, 928. [Google Scholar] [CrossRef]
- Collins, R.P.; Boxall, J.B.; Karney, B.W.; Brunone, B.; Meniconi, S. How severe can transients be after a sudden depressurization? J. Am. Water Work Assoc. 2012, 104, 67–68. [Google Scholar] [CrossRef]
- Behbahani-Nejad, M.; Bagheri, A. The accuracy and efficiency of a MATLAB-Simulink library for transient flow simulation of gas pipelines and networks. J. Pet. Sci. Eng. 2010, 70, 256–265. [Google Scholar] [CrossRef]
- Esmaeilzadeh, F.; Mowla, D.; Asemani, M. Mathematical modeling and simulation of pigging operation in gas and liquid pipelines. J. Pet. Sci. Eng. 2009, 69, 100–106. [Google Scholar] [CrossRef]
- Vakil, A.; Firoozabadi, B. Investigation of Valve-Closing Law on the Maximum Head Rise of a Hydropower Plant. Sci. Iran. Trans. B Mech. Eng. 2009, 16, 222–228. [Google Scholar]
- Bazargan-Lari, M.R.; Kerachian, R.; Afshar, H.; Bashi-Azghadi, S.N. Developing an optimal valve closing rule curve for real-time pressure control in pipes. J. Mech. Sci. Technol. 2013, 27, 215–225. [Google Scholar] [CrossRef]
- Zhou, J.Z.; Xu, Y.H.; Zheng, Y.; Zhang, Y.C. Optimization of Guide Vane Closing Schemes of Pumped Storage Hydro Unit Using an Enhanced Multi-Objective Gravitational Search Algorithm. Energies 2017, 10, 911. [Google Scholar] [CrossRef]
- Wan, W.; Li, F. Sensitivity Analysis of Operational Time Differences for a Pump–Valve System on a Water Hammer Response. J. Press. Vessel Technol. 2016, 138, 011303. [Google Scholar] [CrossRef]
- Kim, H.; Kim, S.; Kim, Y.; Kim, J. Optimization of Operation Parameters for Direct Spring Loaded Pressure Relief Valve in a Pipeline System. J. Press. Vessel Technol. Trans. Asme 2018, 140, 051603. [Google Scholar] [CrossRef]
- Triki, A.; Chaker, M.A. Compound technique-based inline design strategy for water-hammer control in steel pressurized-piping systems. Int. J. Press. Vessel. Pip. 2019, 169, 188–203. [Google Scholar] [CrossRef]
- Triki, A. Dual-technique-based inline design strategy for water-hammer control in pressurized pipe flow. Acta Mech. 2018, 229, 2019–2039. [Google Scholar] [CrossRef]
- Triki, A. Water-hammer control in pressurized-pipe flow using an in-line polymeric short-section. Acta Mech. 2016, 227, 777–793. [Google Scholar] [CrossRef]
- Wylie, E.B.; Streeter, V.L.; Suo, L. Fluid Transients in Systems; Prentice Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Pezzinga, G. Evaluation of unsteady flow resistances by quasi-2D or 1D models. J. Hydraul. Eng. 2000, 126, 778–785. [Google Scholar] [CrossRef]
- Pezzinga, G. Discussion of ‘Developments in unsteady pipe flow friction modelling’. J. Hydraul. Res. 2002, 40, 650–653. [Google Scholar]
- Bergant, A.; Simpson, A.R.; Vitkovsky, J. Developments in unsteady pipe flow friction modelling. J. Hydraul. Res. 2001, 39, 249–257. [Google Scholar] [CrossRef] [Green Version]
- Vardy, A.E.; Brown, J.M.B. On Turbulent, Unsteady, Smooth-Pipe Flow. In Proceedings of the International Conference on Pressure Surges and Fluid Transients, Harrogate, UK, 16–18 April 1994; BHR Group: Harrogate, UK, 1996; pp. 289–311. [Google Scholar]
- Brunone, B.; Golia, U.M.; Greco, M. Effects of 2-dimensionality on pipe transients modeling. J. Hydraul. Eng. 1995, 121, 906–912. [Google Scholar] [CrossRef]
- Wan, W.; Huang, W. Water hammer simulation of a series pipe system using the MacCormack time marching scheme. Acta Mech. 2018, 229, 3143–3160. [Google Scholar] [CrossRef]
- Wan, W.; Huang, W.; Li, C. Sensitivity Analysis for the Resistance on the Performance of a Pressure Vessel for Water Hammer Protection. J. Press. Vessel Technol. Trans. Asme 2014, 136, 011303. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Water level of the upstream reservoir () | 52.40 m |
| Length of the pipe () | 2820 m |
| Rated discharge of the pipeline () | 0.12 m3/s |
| Wave speed of water hammer () | 1,000 m/s |
| Time of closing valve () | 8.0 s |
| Diameter of the main pipe () | 0.40 m |
| Section of the surge tank () | 0.05 m2 |
| Parameters | Value |
|---|---|
| Latency response threshold of release valve () | 4.0 m |
| Spring orifice coefficient () | 28.6 |
| Discharge coefficient of release valve () | 0.65 |
| The nominal area of release valve orifice () | 0.037 m2 |
| Latency response threshold of compensate valve () | 0.20 m |
| Spring orifice coefficient () | 0.5 |
| Discharge coefficient of compensate valve () | 0.80 |
| The nominal area of compensate valve orifice () | 0.03 m2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, W.; Zhang, B.; Chen, X.; Lian, J. Water Hammer Control Analysis of an Intelligent Surge Tank with Spring Self-Adaptive Auxiliary Control System. Energies 2019, 12, 2527. https://doi.org/10.3390/en12132527
Wan W, Zhang B, Chen X, Lian J. Water Hammer Control Analysis of an Intelligent Surge Tank with Spring Self-Adaptive Auxiliary Control System. Energies. 2019; 12(13):2527. https://doi.org/10.3390/en12132527
Chicago/Turabian StyleWan, Wuyi, Boran Zhang, Xiaoyi Chen, and Jijian Lian. 2019. "Water Hammer Control Analysis of an Intelligent Surge Tank with Spring Self-Adaptive Auxiliary Control System" Energies 12, no. 13: 2527. https://doi.org/10.3390/en12132527