1. Introduction
Power systems are important in engineering, and their stable and continuous operation is inherently connected to social welfare and economic prosperity. Power system networks can be characterized as large-scale complex systems which encompass a broad array of subsystems and tasks. This intrinsic complexity is constantly evolving and growing in alignment with state-of-the-art technologies, facilitating a more efficient power generation, transmission, and distribution. Recently, the increasing penetration of sustainable energy sources into the energy map and the digitalization of power control systems have resulted in sophisticated concepts, such as intelligent power networks and smart grids. The stochasticity and intermittency of renewable energy sources, along with the decentralization of power generation and the integration of unsafe communication layers across the physical structure of the power network, are just a few of the vital reasons that render the control of the modern power systems highly challenging.
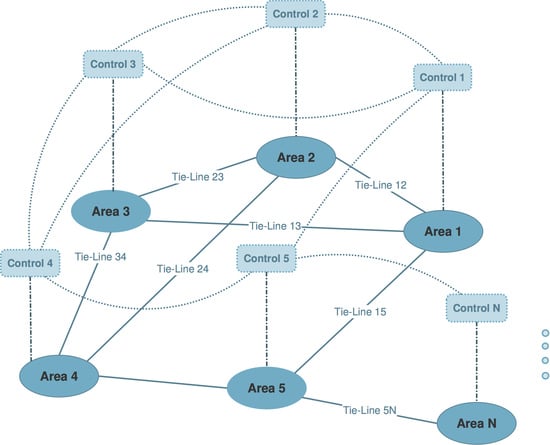
In this paper, we consider power system networks formed of distinct control areas which are interconnected via weak transmission lines referred to as tie-lines. Each area maintains a single nominal frequency across its geographical region and is comprised of either a single or a group of generators. In order for an area to maintain its frequency under load variations in the case of multiple generators, a local load frequency controller is used, distributed to the corresponding turbine-governing systems of each generating unit. The design of load frequency control (LFC) is based on a single-plant model which represents the sum of the generating units [
1]. The area is responsible for meeting power demand of its own consumers, as well as of certain adjacent areas with which power exchange is normally scheduled for a contracted value. However, due to power load differentiation, the frequency of each area, along with the scheduled power exchange with its interconnected peers, may vary from their nominal value.
The rate of change of frequency (RoCoF) is related to the power system inertia and the active power mismatch. The relationship between inertia of a distinct area, RoCoF, and change in active power can be found in [
2,
3]. Virtually, synchronous machines have been the main source of system inertia, hence the area frequency is directly coupled to the rotational speed of the aggregated synchronous generators [
2,
4]. Traditionally, the prime mover of conventional thermal power stations and hydroelectric plants, along with the synchronous generators (typically of large inertia), act as smoothing (low-pass) filters on variations of electric loads and participate primarily in the frequency regulation of the area. In contrast, renewable energy generation units behave differently from conventional synchronous generators, mostly because they are connected through power electronic interfaces. In effect, these devices fully or partly can electrically decouple the generator from the grid [
3], hence the coupling between the rotational speed of the generator and the system frequency is eliminated [
5]. For this reason, unlike synchronous generators, inverter-connected generation units do not inherently contribute to the total system inertia [
6]. Although control strategies for participation in frequency regulation by inverter-connected sources have been proposed in literature [
7,
8,
9], such functions are rarely enabled in reality. Thus, the development of inverter-connected renewable energy sources introduces new challenges in the design of LFC, which is primarily performed by synchronous generating units due to their inherent capability to affect the RoCoF caused by active-power-imbalance events. Here, we focus on the design of LFC schemes with distributed pattern for multi-area power systems. In our model, we intentionally consider only synchronous generating units (thermal power stations, hydroelectric power plants) for the reasons outlined above. The violation of steady-state operation caused by active power imbalance is formulated as a feedback disturbance rejection problem of a large scale interconnected system.
LFC is one of the most challenging problems in multi-area power systems. An introduction to power systems design and LFC can be found in textbooks [
2,
10,
11], while an overview of control strategies in the field of LFC problems has been discussed in [
12,
13]. Comprehensive literature surveys on the topic of LFC for diverse configurations of conventional and future smart power systems can be found in [
14,
15,
16,
17]. In typical situations, the geographical expanse and the mere complexity of the system resulting from dynamical couplings among areas make centralized control schemes either impossible or undesirable [
18,
19,
20]. Hence, decentralized and distributed control is typically needed to ensure stable network operation. Analytical methods for designing a decentralized and distributed LFC have been presented in [
21,
22,
23]. Robust decentralized control design methodologies have been presented in [
24], where the authors propose two control schemes for LFC based on robust optimal control techniques and linear matrix inequalities (LMI). A rigorous and computationally efficient method, also based on the versatile formulation of LMI’s for robust decentralized control of multi-machine power systems, has been presented in [
25].
A systematic methodology based on reachability for identifying the impact of potential cyber attacks in the Automatic Generation Control (AGC) of a two-area power system has been presented in [
26]. Set-theoretic method for LFC design in the context of cyber-physical power systems can be found in [
27], while in [
28], the authors propose LFC design based on an anti-windup compensator, assuring stability of the closed-loop system even in cases of large load disturbance. Model predictive control has also attracted attention from the power system community in recent years due to its convenience in managing online disturbance rejection problems with state and input constraints, which is a highly desired feature in a multi-area power system control. Model predictive control with decentralized and distributed architecture for LFC design in interconnected power systems has been proposed in [
29,
30,
31,
32,
33].
In this paper, we formulate the LFC of multi-area power systems as a large-scale optimal control problem in the absence of state and input constraints. An arbitrary number of identical areas is considered. The multi-area power system is represented as a multi-agent network composed of identical dynamically coupled linear time-invariant systems. These dynamical couplings can be expressed in a state-space form of a certain structure and represent interconnections between areas through tie-lines. In our case, each agent representing an area can produce LFC signals independently and is dynamically coupled with a certain number of its peers referred to as neighboring agents (areas) with whom it can exchange state information. Effectively, we assume that the topology of physical couplings (tie-lines) and the topology of information exchange among agents (areas) coincide and are described by the same graph.
Linear quadratic regulator (LQR) control design has been successfully utilized in frequency regulation problems, mostly due to large stability margins of its stabilizing solution, with the fundamental work of [
34] being a benchmark approach to LQR-based LFC of multi-area power systems. Ever since, considerable research has been carried out on this topic; [
35,
36,
37,
38] represent some recent works. Over the past few years, there has been a renewal of interest in control of networks composed of a large number of interacting systems. The fundamental work of [
39,
40] in this field discusses distributed LQR design for a set of identical decoupled dynamical systems. Unfortunately, there is no documented distributed LQR-based approach to networked systems with dynamical couplings and, consequently, no distributed LQR-based LFC has been noticed in literature so far. The research of this paper motivated by the structure of a multi-area power system with dynamical couplings between interconnected areas, attempts to cover this particular gap in literature. We believe that this is the major contribution of our work the design description of which is summarized in the following paragraph.
We follow a top-down method to approximate a centralized LQR optimal controller by a distributed control scheme. It is shown that overall network stability is guaranteed via a stability test applied to a convex combination of Hurwitz matrices. The validity of this condition is consistent with the stability of a class of network interconnection structures which is identified. Sufficient condition for stability of convex combination of Hurwitz matrices can be found in [
41]. Our approach was inspired by the powerful results proposed in [
39]. Therein, the subsystems constituting the network are dynamically decoupled, and the stability of the distributed scheme designed relies on the stability margins of LQR control. A complementary distributed LQR method has also been proposed in [
40], which consists of a bottom-up approach in which optimal interactions between self-stabilizing agents are defined so as to minimize an upper bound of the global LQR criterion. A major assumption of our work is that the dynamical models of each area are identical. Although this assumption may be unrealistic in practice, it simplifies the design problem considerably, which is especially hard due to the coupling terms appearing in the model. Future work will attempt to eliminate or relax this assumption. Preliminary results in this direction can be found in [
42,
43]. The simulation results presented in
Section 6.2 were carried out under considerable perturbations and suggest that this hypothesis is valid and that our results can be extended to the non-identical case.
In this paper, our interest in distributed LFC arises from the necessity to avoid centralized schemes when these become computationally prohibitive. We wish to tackle the LFC problem of geographically sparse power grids following a distributed control approach, the main advantage of which is that it can replace the conventional centralized controller, which has high communication and processing costs and suffers from a single-point-of-failure drawback [
23]. Faults caused by interconnection losses might give rise to an unacceptable frequency deviation and may accelerate a cascading failure event. The proposed distributed LFC controller is stabilizing even if tie-line interconnections and communication links are added to or removed from the overall system, as long as this does not violate the stability condition given in
Section 4 and
Section 5. This powerful feature gives integrity to the control subsystem of each area and enhances the resilience of the power system in the presence of interconnection variations. The main contributions of this paper are summarized as follows:
We propose a novel distributed-LQR algorithm for networked systems with dynamical couplings applied to LFC of large-scale multi-area power systems.
The control scheme is obtained by optimizing an LQR performance index with a tuning parameter which can be used to emphasize/de-emphasize relative state difference between interconnected areas. In effect, this parameter controls the magnitude of tie-line power exchange and frequency synchronization between interconnected areas.
Our approach enhances power system modularity and leads to a simple and verifiable stabilizability condition for a class of network topologies. Extensive simulations presented in this work support our conjecture that this stabilization criterion can be extended to more general LFC control network problems.
The remaining of the paper is organized in seven sections. In
Section 2, preliminaries on graph theory are presented which are utilized in the control design contained in
Section 4 and
Section 5. In
Section 3, we model a multi-area power system and describe the control problem of this paper. The main results of our work are presented in
Section 4 and
Section 5, which involve large-scale LQR problems.
Section 6 presents simulation results, and
Section 7 summarizes the main conclusions of the work. A discussion of the main results and suggestions for future work are also included in this section.
2. Preliminaries
A graph is defined as the ordered pair , where is the set of nodes (or vertices) and the set of edges with , . The degree of a graph vertex j is the number of edges which start from j. Let denote the maximum vertex degree of the graph . We denote by the adjacency matrix of the graph . In particular, the th element of , if ∀, and zero otherwise. Let if and . We call the neighborhood of node i. The adjacency matrix of undirected graphs is symmetric. We define the Laplacian matrix as , where is the diagonal matrix of vertex degrees (also called the valence matrix). Let be the spectrum of the Laplacian matrix associated with an undirected graph arranged in nondecreasing semi-order. The following two results are standard.
Proposition 1. Let be a complete graph (with all possible edges) with vertices and be the corresponding Laplacian matrix. Then, .
Proposition 2. Let A, B be matrices of appropriate dimensions and be Laplacian matrix with spectrum . Then, the spectrum can be reduced to with .
An extensive survey on the spectrum of the Laplacian matrix of graphs can be found in [
44].
4. Large-Scale LQR for Dynamically Coupled Systems
Consider a network of
dynamically coupled LTI systems referred to as agents. At local level, the dynamics of the
i-th agent is represented in state-space form as:
where
,
are states and inputs of the
i-th system, respectively. A complete graph (with all possible edges)
with Laplacian matrix
is utilized to model the topology of the physical links among the agents. Node
of
corresponds to local state
, while edge
corresponds to the
term in (
11). Now construct the aggregate state
and input vector
by stacking all state and input vectors, respectively, of all
systems taken in ascending order depending on their label in graph
. The aggregate state-space of the network becomes:
with:
Consider now LQR control problem for the network of
coupled systems:
where the cost function:
with:
Here, the weighting matrices
and
penalize local states and inputs of each node, respectively, while the matrix
is chosen to weigh relative state differences between subsystems. The following stabilizability and observability assumptions guarantee a solution to LQR problem (
14).
Assumption 1. Let . The pair is stabilizable and is observable.
Assumption 2. Let . The pair is stabilizable and is observable.
Under Assumption 1,2, problem (
14) has a unique stabilizing solution
, which gives finite performance index (
15) equal to
. The optimal state-feedback gain
, where
is the symmetric positive definite (s.p.d.) solution to the (large-scale) Algebraic Riccati Equation (ARE):
Due to special formulation of (
14),
and
retain certain structure, which will prove essential for designing stabilizing distributed controllers in the next section. The specific structure of these matrices is proved in Theorem 1. In the following, we set
.
Theorem 1. Assume is the s.p.d solution to (17) associated with the optimal solution to (14). Let be decomposed into blocks of dimension , each denoted by and referred to as the -block of . Then, the following statements hold. - I.
where is the stabilizing solution to single-node ARE: - II.
for all , where is symmetric matrix associated with the node-level ARE:
Proof. First, we prove part I of the Theorem. The equations corresponding to the diagonal blocks of (
17) are:
for
. Note that
due to symmetry of
in (
17). Now let:
Substituting (
21) to (
20) gives:
Using (
21), the equations corresponding to the off-diagonal blocks of (
17) can be written as:
Summing up (
23a) for all
block-wise and adding this summation to (
22a) gives:
where all the terms associated with
cancel out. Summing up (23) over all
block-wise and adding this summation to (22) gives:
Equation (
25) has been established in Theorem 1 of [
39]. It is true also here due to (
24). Adding up (
25) over all
, we get:
which is sum of
identical ARE’s, i.e.,
Equation (
21) implies
which, along with (
27), proves part I.
Since
,
are block diagonal and
,
have a repetitive pattern, the ARE (
17) can essentially be decomposed into
identical equations. This implies that all
with
and
are equal to each other. Let
be symmetric matrix representing the off-diagonal blocks
of
. Setting
for
and
for
and
and substituting these matrices into (23) gives:
which after rearranging some terms and multiplying both sides by
becomes:
or
Adding now (
18) to (
30) results in:
or
which proves part II. □
By assumption, the matrices
and
are selected block diagonal. Consequently, the state-feedback gain
associated with the optimal solution to (
14) retains the same structure with
. This leads to the following Corollary.
Corollary 1. Assume is the optimal state-feedback gain obtained from the solution to (14) which gives minimum performance index with being the s.p.d solution to (17). Let and be decomposed into blocks of dimension and denoted by and , respectively each referred to as -block of the respective matrix. Then, the following are true; - I.
.
- II.
for .
- III.
for .
- IV.
for and .
- V.
.
Theorem 1 states that due to special formulation of the cost function (
15) and the structure of the aggregate state-space form (
12), the large-scale LQR problem (
14) under Assumption 1,2 can effectively be reduced to finding the solution of two node-level ARE’s. This feature may be highly beneficial for problems involving networks, the topology of which is modeled by graph with an excessively large number of vertices
.
Applying the stabilizing optimal state-feedback control
to (
12) results in a closed-loop matrix, which is Hurwitz and is written as:
Due to Proposition 2, the spectrum of
can be decomposed into:
where
.
Remark 1. The matrix is Hurwitz for and .
In the sequel, we require that:
Condition 1. The matrix is Hurwitz for all .
Condition 1 states that all convex combinations of two Hurwitz matrices,
are Hurwitz, where
and
. Sufficient conditions for Hurwitz stability of convex combination of Hurwitz matrices can be found in Theorem
in [
41]. In essence, Condition 1 characterizes a class of LQR problems (
14) which admit of solutions for which the Condition 1 holds. This will be used later for the design of distributed stabilizing controllers. For a given selection of weighting matrices
of the LQR problem (
14), the validity of Condition 1 can be verified by searching for a symmetric positive definite matrix
for which the following LMI,
is feasible. Obviously, if matrix
exists then premultiplying and postmultiplying (
36) by
and
, respectively, for
leads to Lyapunov inequality:
which admits of a solution
. This demonstrates that
is a Hurwitz matrix for all
. Alternatively, the stability of
can be examined via a simple graphical test by plotting the eigenvalue with the maximum real part of the matrix
for
.
Distributed LQR Design for Dynamically Coupled Systems
Let sparse network be formed of
N identical and dynamically coupled LTI systems. We note here that the index
N differs from
employed for networks modeled by complete graph in the previous section, and in the sequel, we use index
N to refer to schemes with sparse structure. Let the couplings among the systems be modeled by graph
with Laplacian matrix
. The neighborhood of the
i-th system is denoted by
and comprises all
with
, for which
. Let the dynamics at local level of the
i-th system be:
where
and
. The aggregate state-space of the network becomes:
where
,
and:
Note that the Laplacian matrix
in (
40) does not necessarily correspond to a complete graph in contrast to (
13) and generically the matrix
in (
40) is sparse. A stabilizing distributed controller for (
39) is constructed in the following Theorem. For convenience, we set
.
Theorem 2. Consider a network of N coupled systems with dynamics described in (38). The network topology is modeled by graph with Laplacian matrix . Let be the maximum eigenvalue of and denote by the smallest integer which is greater than or equal to . Consider LQR problem (14) for , define P and via (18) and (19), respectively, and assume Condition 1 is true. Define also distributed state-feedback gain: Then, the closed-loop matrix,is Hurwitz. Proof. Consider the spectrum
. Let
be state-space transformation, where
is an orthogonal matrix whose columns consist of the eigenvectors of
. In the transformed coordinates,
, where
with
. The spectrum of
is:
where
for
are the eigenvalues of
. Condition 1 holds, hence
is Hurwitz for all
. Consequently,
is also Hurwitz since
for all
. This proves the Theorem. □
Remark 2. For a time-varying graph with fixed number of vertices and time-varying edges the maximum eigenvalue of the time-varying Laplacian matrix is bounded by . Consequently, solving (14) for and assuming Condition 1 holds leads to a distributed controller , which stabilizes the network for all possible couplings among the N systems. Naturally, this does not imply stability of switching between stable network interconnections. 5. Large-Scale LQR for LFC
In this section, we consider LQR problem (
14) for a multi-area power system. Recall that we denote by
the number of areas of power network, the topology of which is modeled by complete graph and by
N the number of areas corresponding to sparse networks. Let the aggregate state-space model of
-area power system be written as:
where
,
,
with
,
,
for
defined in (
8) and:
Parameters in
can be found in
Table 1. In view of Assumption 1, LQR problem (
14) for
and
with
given in (
10) initially fails to admit a solution since (
18) cannot be solved. This stems from the fact that the pair
has an uncontrollable mode at the origin, and the realization (
44) is non-minimal. The non-minimality is due to a redundant equation related to the sum of the total power inflow
to each area, which equals zero or
. Now, we show how to reformulate the system matrices and derive a stabilizing controller for the network.
Define permutation matrix:
where
and consider Kalman decomposition of the pair
applying state-space transformation
for
. Let the system matrices
in the new coordinates be written as:
where
. The controllable part of
is denoted by
with:
The zero in the
entry of
stands for the uncontrollable mode at the origin of
. Now, construct perturbation matrix:
for
with
sufficiently small and define:
where
and
. Since
, the pair
is stabilizable. According to Theorem 1, LQR problem (
14) with parameters
is reduced to two node-level ARE:
where
,
are
e-dependent and
. Note that the solution
to ARE (
52) remains invariant under
e-perturbation. Theorem 3, next, summarizes the method of solving large-scale LQR problem (
14) with one uncontrollable mode at the origin.
Theorem 3. Consider -area power system with aggregate state-space form given as in (44). Consider Kalman decomposition of and define given in (47). Choose with sufficiently small and define perturbed matrices , as given in (50). Solving LQR problem (14) with parameters and defining and from (51) and (52), respectively, leads to the following argument: the matrix, - I.
is Hurwitz for .
- II.
has eigenvalues in the left-half-plane and one at the origin for .
Proof. In view of the special structure of
and
, it can easily be seen that:
Due to (
52), the matrix
is Hurwitz and because of (54) the matrix
is also Hurwitz. This proves part I.
Now, let the matrix
in (
51) be decomposed into blocks of appropriate dimensions according to the Kalman decomposition (
48). Then, ARE (
51) can be written as:
The first diagonal block of (55) gives:
and implies that the matrix
is Hurwitz where the symmetric positive definite matrix
does not depend on parameter
e. The two remaining blocks
and
of
are
e-dependent and given by:
The matrix
in (57) is invertible since
is Hurwitz and
. Now, the closed-loop matrix
is Hurwitz and can be written as:
Since (59) is in canonical form, its spectrum can be decomposed in:
Setting in (60) proves the Theorem. □
Similarly to Condition 1, we impose the following stability requirement.
Condition 2. The matrix is Hurwitz for all .
In the next paragraph, we propose distributed stabilizing LFC controllers for multi-area power systems with sparse topology based on Condition 2.
5.1. Distributed LQR-Based LFC
Let undirected graph
with Laplacian matrix
models the interconnection topology of a multi-area power system formed of
N identical areas with aggregate state-space form written as:
The matrices
,
,
, and
are given as in (45). The aggregate vectors
,
, and
are constructed by stacking the augmented state-vector
, input-vector
, and disturbance-vector
, respectively, shown in (
8) of each area with ascending order depending on graph
. Now, define perturbation matrix:
where
and
sufficiently small, and also define perturbed matrices
and
as:
where
is as defined in Theorem 2. A distributed LFC controller for (61) is constructed next, in Theorem 4.
Theorem 4. Consider power system of N identical areas with network topology modeled by graph with Laplacian matrix and aggregate state-space form given by (61). Let be the maximum eigenvalue of and denote by the smallest integer which is greater than or equal to . Set , specify with sufficiently small and define perturbed matrices and as in (63). Consider LQR problem (14) for perturbed systems , define and via (51) and (52), respectively, and assume Condition 2 holds. Define also distributed state-feedback gain: Then, the closed-loop matrix of the original system,has eigenvalues in the left-hand-plane and one at the origin. The proof follows similar arguments stated for proving Theorem 2 and is omitted here. The conclusions as far as the stability of the network is concerned still hold, even if the controllability Assumption 1 is no longer valid. The distributed state-feedback gain (64) can be used for stabilizing the network despite the fact that the closed-loop matrix (65) has a single eigenvalue at the origin. This mode corresponds to the trivial differential equation , which implies and can be easily derived via an appropriate state-space transformation.
In the following section, the distributed LQR controller constructed above is employed to drive the LFC of a six-area power system. We show that network stability is guaranteed for a class of tie-line interconnection structures via a single tuning of the LFC controller. In the simulations, we consider three different interconnection schemes. We also include certain input and state constraints in the linear model of each area in order to assess the stability margins of the proposed control scheme. A robust stability test has also been carried out as a separate case study involving parametric uncertainties in the parameters of each area. We stress here that robust stability and nonlinear analysis are beyond the scope of this paper. Nonlinearities and parameter perturbations considered in the next section are only used for simulation purposes where the performance of the proposed control scheme is also tested under more intense conditions.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
