4.2. Simulation Results with Different Weighting Coefficients
It should be noted that all those fitting coefficients in Equations (12)–(15) play an important role in determining the specific value of
. However, considering the huge amount of fitting data (the whole operation conditions are supposed to be included) and space limitation, corresponding fitting coefficients table are not presented in this paper. Additionally, specific configurations of the investigated P3 HEV are listed in
Table 4. It needs to be emphasized that a series of discrete values of
is determined as algorithm input to further explore the impact of weighting coefficient upon the control strategy.
is set as 0.2 while
is set as 0. As mentioned above, the realization of particle emissions reduction is our primary concern in the present study. Therefore, these two most representative scenarios for particle are investigated in detail with simulation results shown as follows:
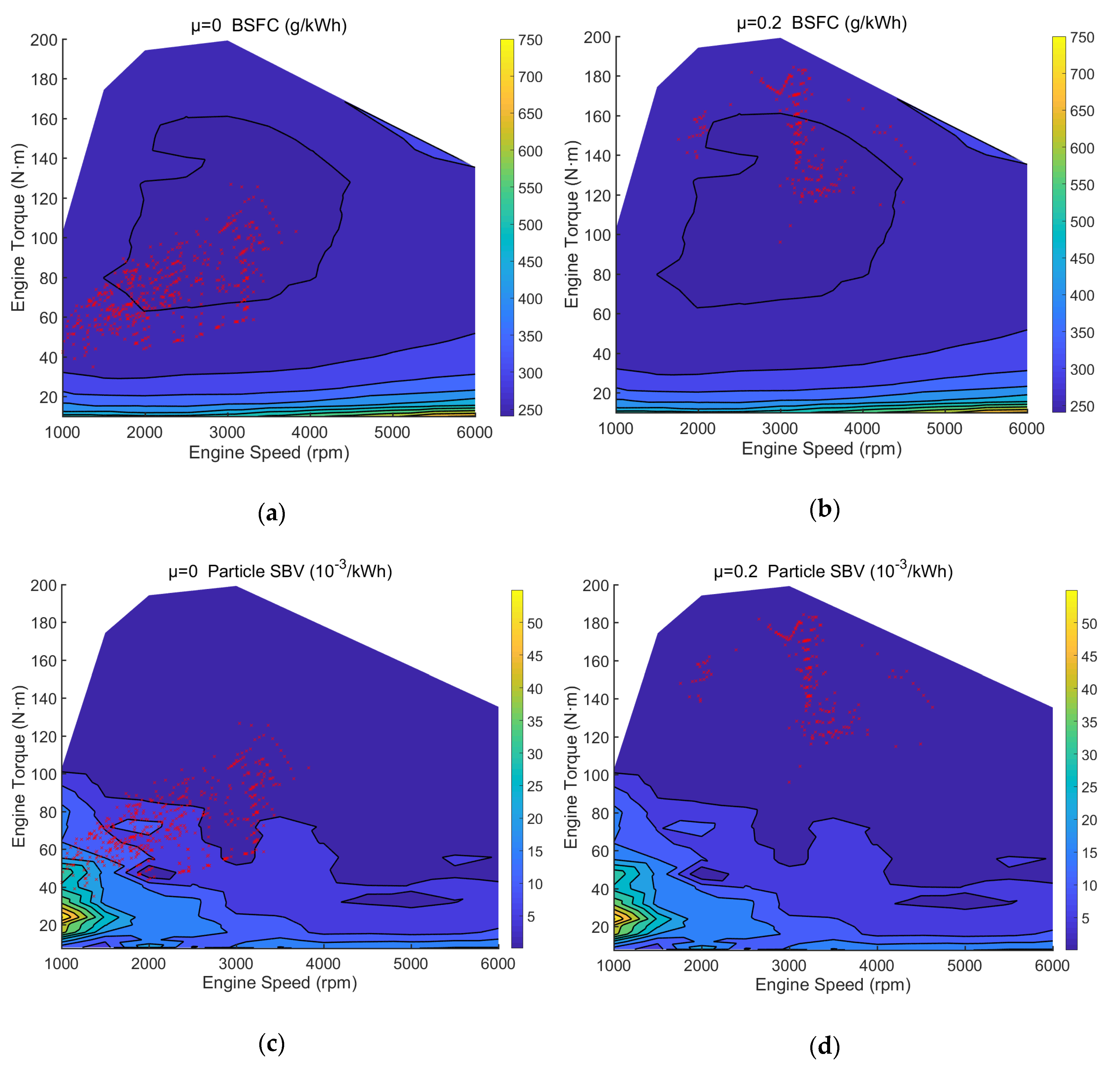
With respect to different weighting coefficients, the simulation results of
are presented in
Figure 11a,c, contrasted with those of
in
Figure 11b,d. As shown in
Table 3, the cycle time of WLTP is 1800 s. It should be noted that the time step in the MATLAB/SIMULINK model is set as 1 s, which indicates that all operation condition points of the complete WLTP cycle amount to 1800. Red cross dots in
Figure 11 represents these operating points.
Applying Equation (10), it is clear that the leverage of emission performance will be not taken into consideration in the
scenario. Comparing
Figure 11a,b, it can be concluded that the distribution status of brake specific fuel consumption (BSFC) values of all operating points fails to change significantly with
increasing from 0 to 0.2. In the
scenario where the established objective function only pays attention to energy consumption, nearly half of all operating points are located in the optimal fuel economy area while the other half are mainly located at its periphery area as shown in
Figure 11a. By contrast, the above situation seems to stay the same in the
scenario where emission performance influence plays an important role as exhibited in
Figure 11b, which implies that the overall fuel consumption of these two scenarios are roughly equivalent.
Nevertheless, remarkable differences can be observed when it comes to the amount of particle represented by specific blackening values between these two scenarios. As shown in
Figure 11d, operating points are more concentrated in the low SBV area with emission performance assigned with a higher weight in the process of constructing objective function in Equation (10). Comparatively, the distribution status of the
scenario appears not as good as the other one. As shown in
Figure 11c, quite a few operating points situate in the high SBV area, which means more particle emissions during the whole WLTP test cycle.
Figure 12 and
Figure 13 show the variation curves of crucial state parameters including
, engine torque, motor torque, and gear of
and
scenarios, respectively. Associated with the velocity profile of WLTP presented in
Figure 10, comparative analysis leads to the conclusion that the engine generally runs in the relatively high-torque region in the
scenario. Simultaneously, the frequency of recharging and discharging of the vehicle battery, which is represented by the degree of fluctuation observed in the
or motor torque variation curves, is slightly higher. Conversely, the frequency of the gear shift is strikingly lower than that of the
scenario; the corresponding control algorithm will provide the driver with a relatively simple gear shift strategy during the whole WLTP test cycle under the circumstance of the preset value
. Obviously, relevant adjustment of gear shift strategy makes contribution to the driving experience improvements for the driver.
Figure 14 displays the variation curves of
during the whole WLTP test cycle pertaining to different
for emission particles. It can be observed that the maximum decreasing amplitude of
grows larger with
gradually increasing. Considering that the higher
is, the more attention will be paid to the optimization of emission indicators. As a consequence, the operation range of engine is supposed to be obliged to “comparatively low emissions area” (i.e., the darker areas in
Figure 4b) in pursuit of the fulfillment of emission performance considerations. Comparison results in
Figure 14 provide solid evidence that motor will make greater contribution to overall power output to compensate the underpowered engine. It is in perfect accordance with the relevant facts demonstrated by the motor variation curves shown in
Figure 12 and
Figure 13 that motor will act more as a role of power output instead of power generation under the higher
circumstance. Meanwhile, it is confirmed again that the preset constraint condition
must equal
and further, that is strictly satisfied under different
circumstances.
In terms of corresponding simulation results for the other pollutant NOx, similar conclusions can be reached through the same analysis. Due to space limitation, detailed result figures of NOx are presented in
Appendix A.
Combining all the simulation results of the series of discrete values
for both particle and NOx,
Figure 15 exhibits the relationship between emission performance and fuel consumption (FC) based on the 20 obtained sets of data; specific values are listed in
Table A1 in
Appendix A. The data points of particle are marked as 20 red plus dots; those of NOx are marked as blue cross dots. Considering the complete WLTP test cycle, the calculation results of each time step add up to the integrated FC in L/100km and total emissions (i.e., NOx emissions in grams and particle emissions in SBV). As shown in
Figure 15, data points located from top left to bottom right signify the simulation results of increasing
for both exhaust pollutants. By analysis of the curve trend, it is clear that there exists a trade-off relationship between fuel economy and emission performance, whether it is for NOx or particle. As the weighting coefficient
grows up, relevant results indicating worse fuel economy and better emission performance simultaneously are attained through simulation, which also conforms to a previous inference derived from
, set up in Equation (15).
Considering that the investigated P3 HEV is oriented at Europe and China auto market, both the latest European emission standard (i.e., Euro 6c) and the Chinese counterpart (i.e., China VI) are investigated and the emission limits of particle and NOx are shown in
Table 5 [
43,
44,
45,
46,
47]. Moreover, the simulation results obtained from the two most representative scenarios (i.e.,
and
) are also presented in
Table 5 as a contrast. It should be noted that the unit of particle emissions used in China VI and Euro 6c is the number (Nb) of particle per kilometer rather than SBV employed in this paper. Therefore, the conversion of the relevant numerical values is supposed to be performed beforehand. In terms of particle emissions, it can be concluded that the particle number (PN) is more than five times the limit of China VI/Euro 6c in the
scenario where the established objective function only pays attention to energy consumption. Conversely, the PN succeeds in meeting the requirements of these two emission legislations in the
scenario where the emission performance indicator is endowed with a substantial weight. An obvious conclusion that can be drawn is that the effectiveness of the proposed control algorithm is validated once again. With respect to NOx emissions, it is clear that
or
scenario yields results that significantly exceed the limits of the China VI/Euro 6c. As mentioned above, the experimental data of NOx emission is directly captured from the exhaust pipe located before the catalytic converter, which causes its numerical values considerable, thus the optimization effect will be heightened. Actually, HEVs are supposed to be equipped with catalytic converters in order to fulfil the relevant NOx limitations of the China VI/Euro 6c in the real world.
4.3. Comparison between DP and ECMS
Actual execution time features prominently in the practicability of proposed algorithm. In the real world, classical DP algorithm is subject to online application restrictions in most cases because of prohibitive time expenditure. Nevertheless, a real sense of global optimal solution can be obtained by DP algorithm. In contrast to DP, solutions found by ECMS or other simplification algorithm generally suffer, to some extent, local optimal traps. Consequently, offline calculation results based on DP are commonly set as a reference for comparison [
48,
49,
50].
As mentioned above, the proposed control algorithm design is developed on the basis of ECMS. Instead of applying quadratic polynomial fitting method for the sake of the simplification of objective function, the classical DP algorithm employs a comparatively straightforward traversal method in order to identify the specific location of the optimal point. During the optimization process of searching the minimal value of
, the DP algorithm basically calculates the specific values of
under all possible operation conditions and sorts out the corresponding output torque configurations (i.e.,
) for
. It should be noted that the detailed numerical calculation in the DP algorithm is predicated on the raw experimental data (e.g., the emissions map of two main pollutants particle and NOx as shown in
Figure 4) rather than fitting results, which on the one hand guarantees the precision of the global optimal solution obtained by DP algorithm, but on the other hand makes it significantly time-consuming.
Considering both exhaust pollutants,
Figure 16 displays the comparison between simulation results of DP and ECMS; the specific relative error (RE) data are presented in
Table A2 in
Appendix A. It can be concluded from
Figure 16 that DP yields global optimal data points distinguishing from those local optimal counterparts of ECMS with only slightly perceptible difference, which thus demonstrates the accuracy and feasibility of the proposed control algorithm predicated on ECMS.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}