Optimal Scheduling to Manage an Electric Bus Fleet Overnight Charging

 , , ,
, , ,  and
and
Abstract
:
1. Introduction
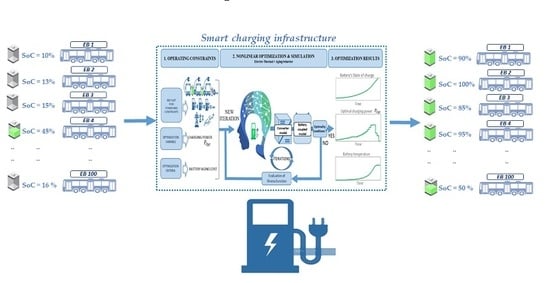
- A methodological approach to manage an EBs fleet overnight charging based on nonlinear programing was carried out. The resulting smart charging strategy aims to minimize the battery aging cost by making optimal charging decisions. This approach can handle several operating constraints and the proposed algorithm could be extended to hundreds of buses with an acceptable computation time.
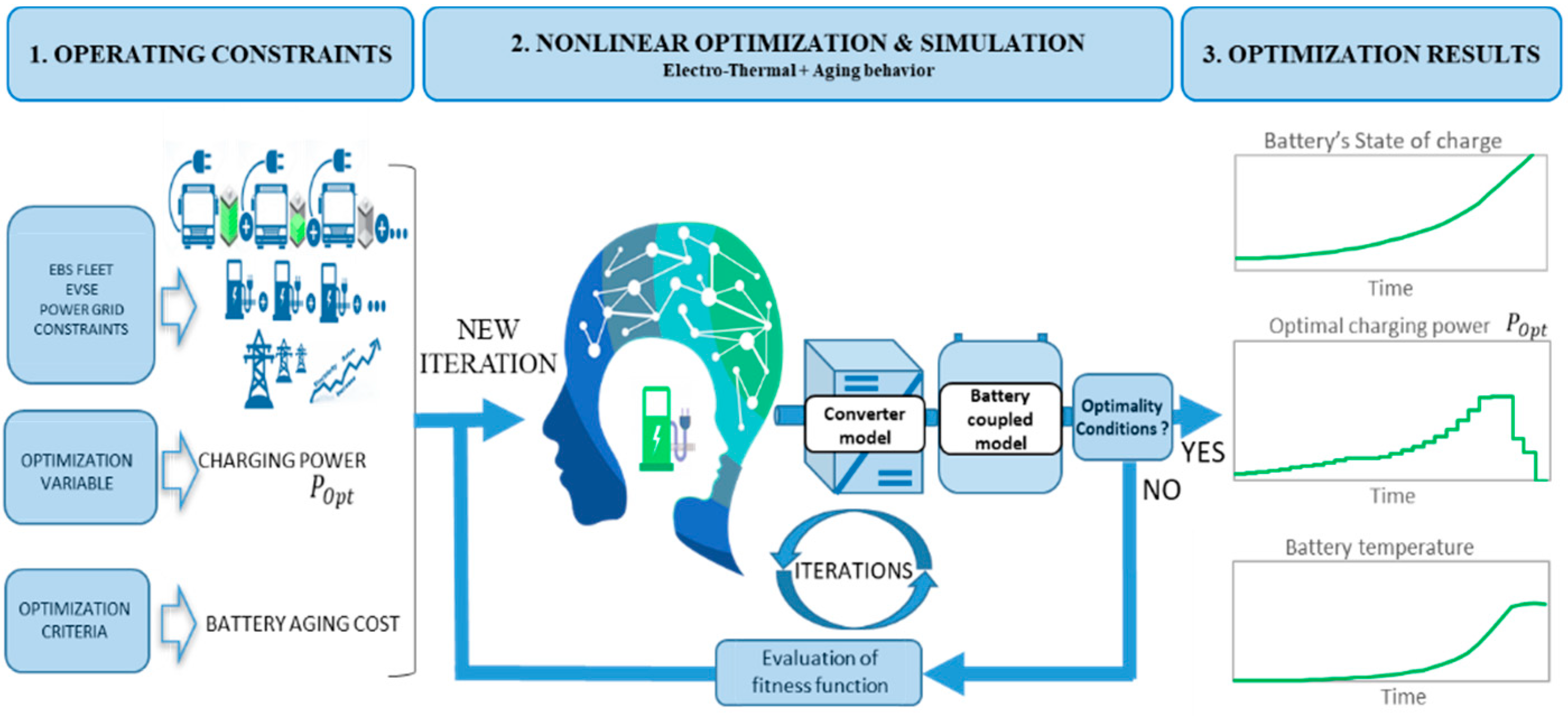
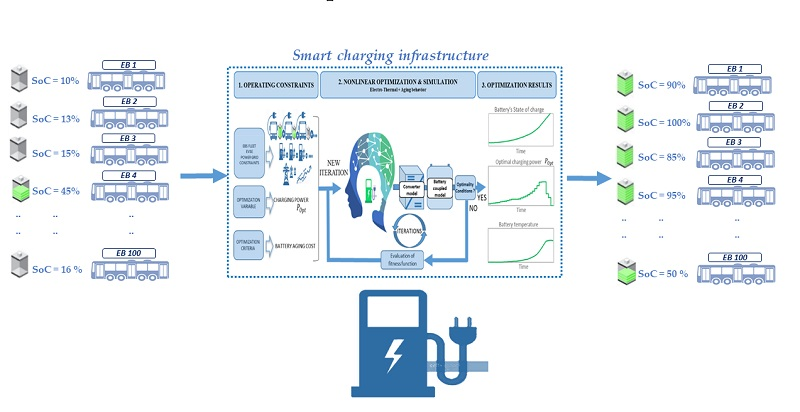
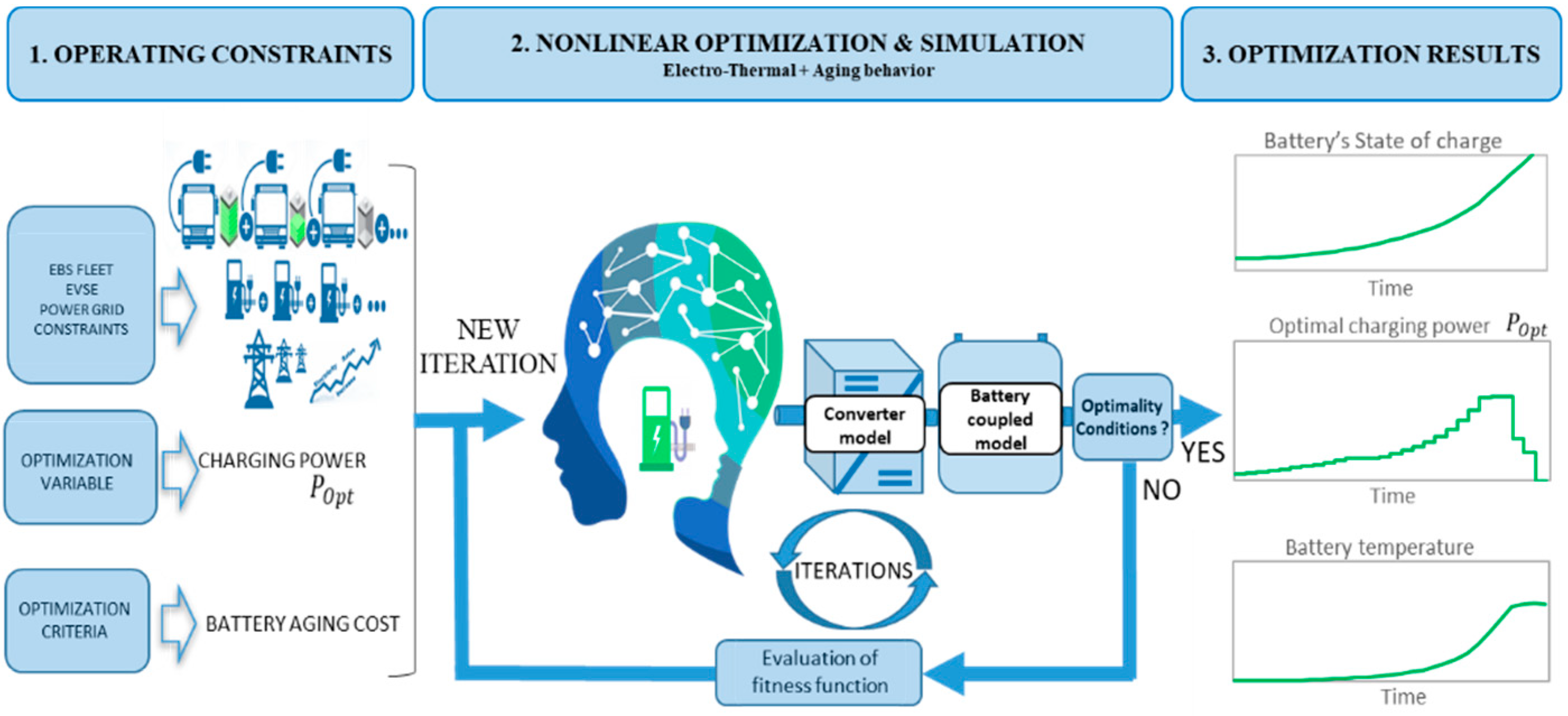
- An optimization tool was developed in the Matlab/Simulink environment. The tool optimizes a large-scale EBs fleet charging considering the grid technical constraints and real operating constraints. It includes an Electro-Thermal and Aging coupled battery model of a given EB to simulate the dynamic response of the battery.
- A case study was performed where the simulation of the proposed approach was conducted taking into account some real operating constraints. The potential economic gain of an optimal EBs charging for 10 years operation was compared to three typical non-optimal charging strategies to show the potential economic gain.
2. Methodology and System Modeling
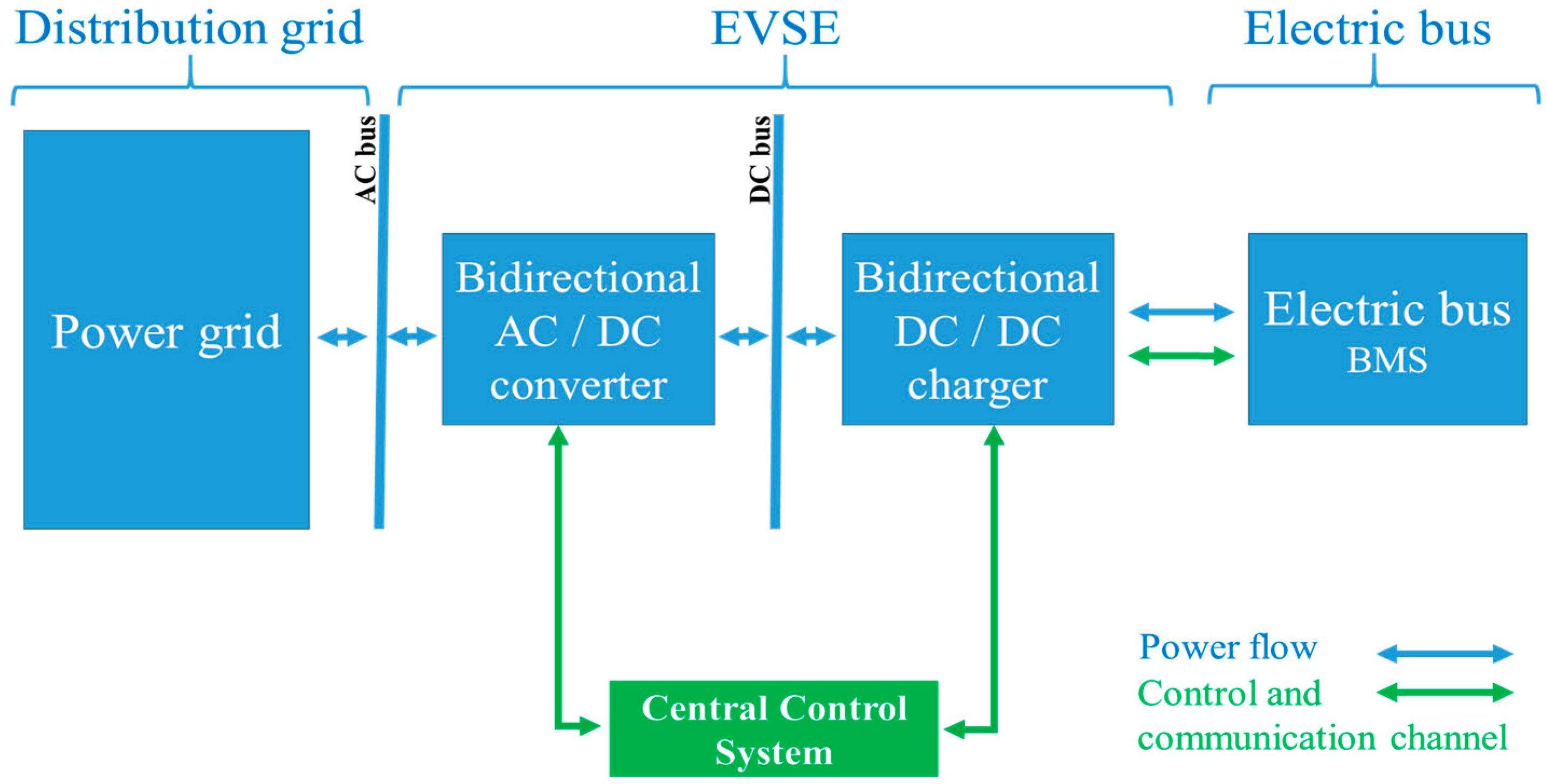
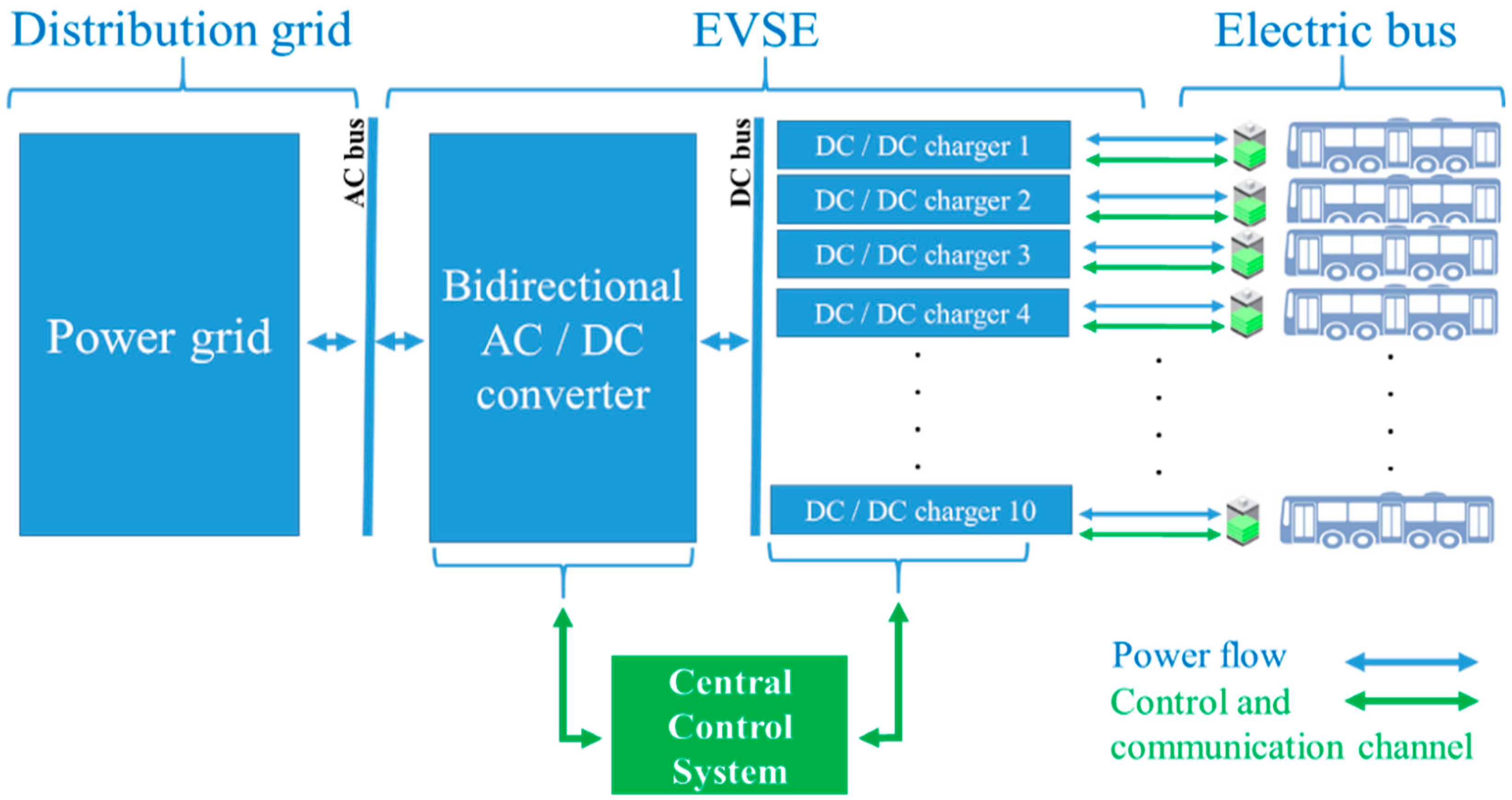
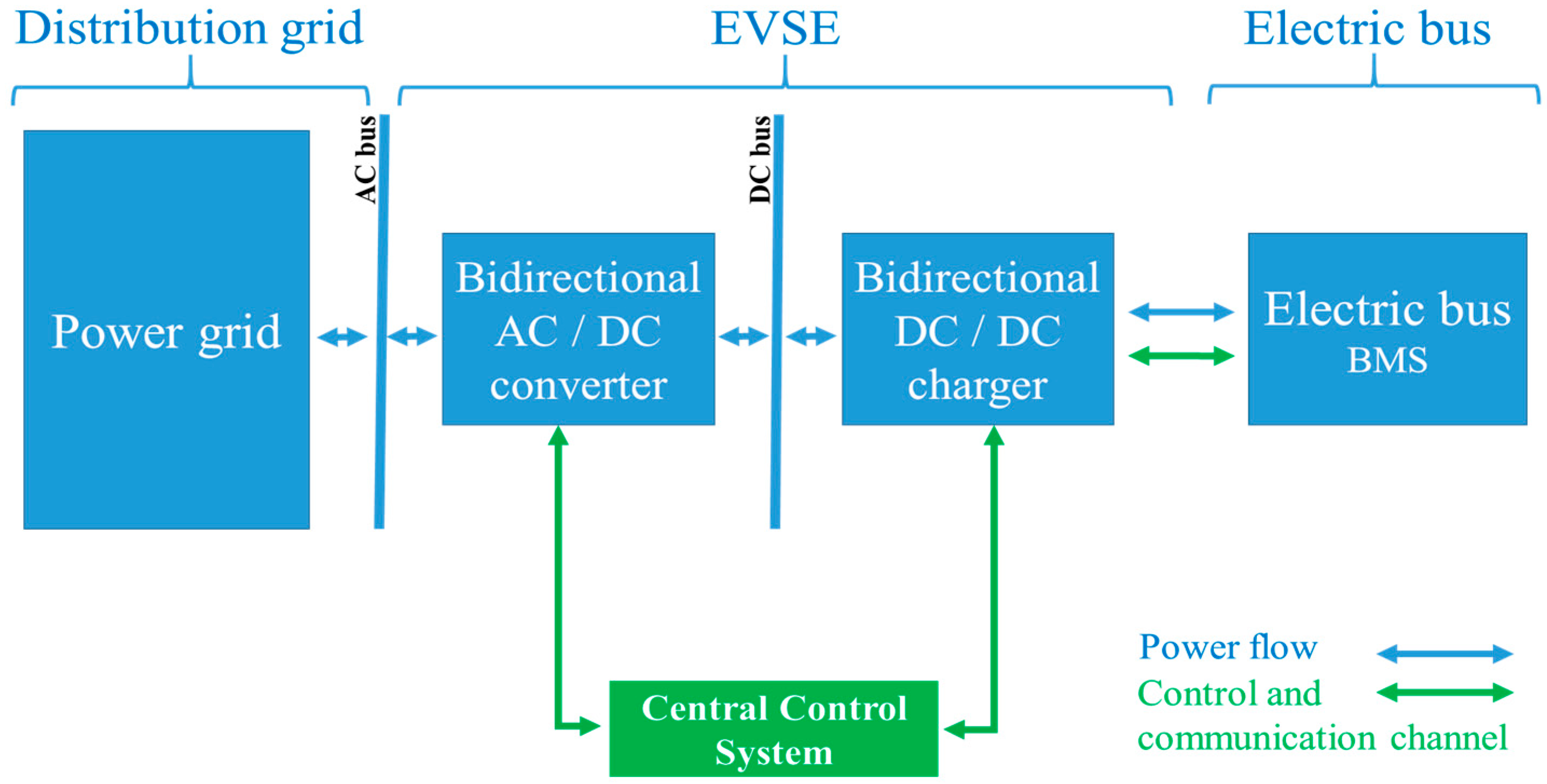
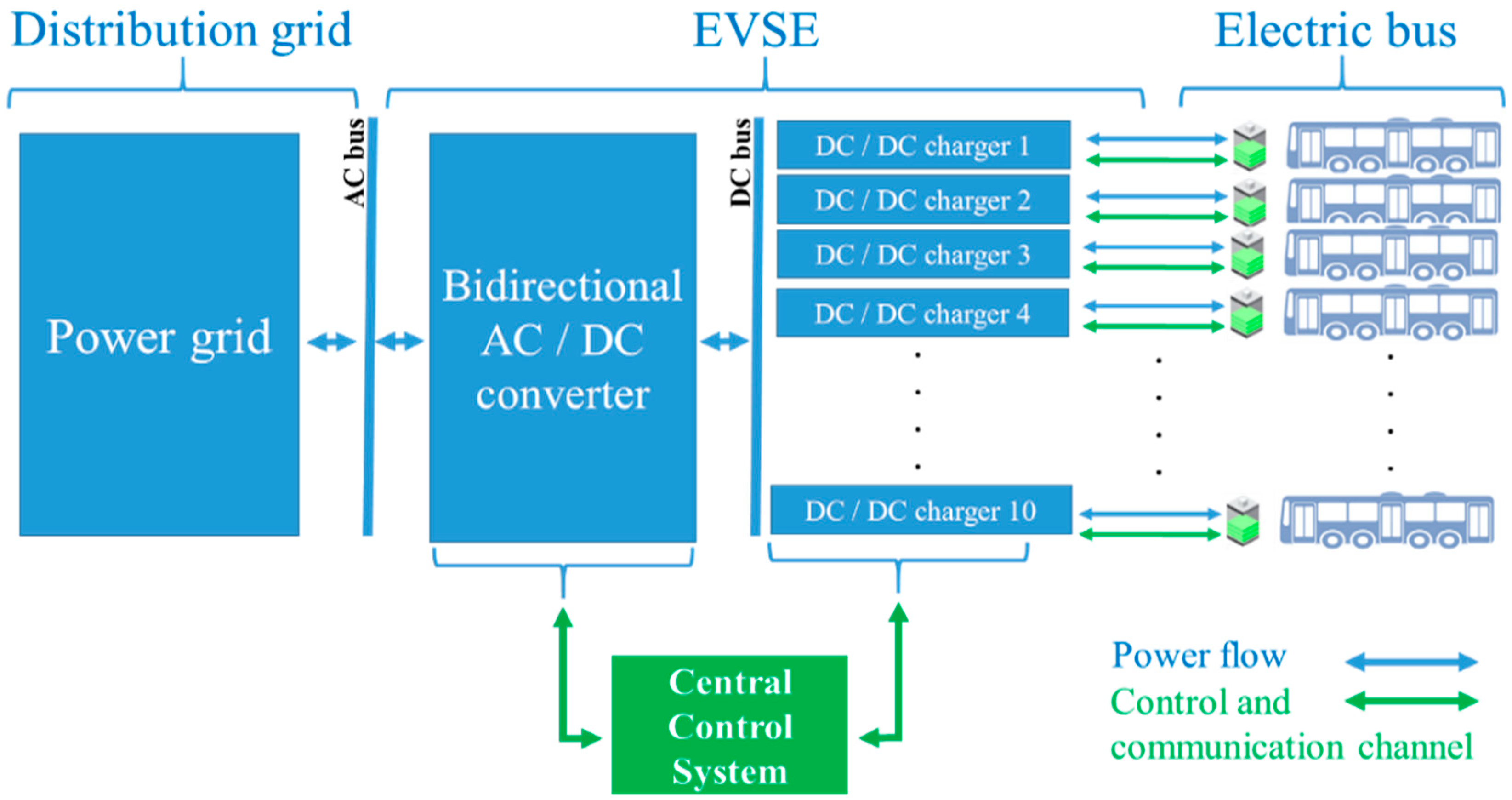
2.1. Electric Vehicle Supply Equipment and Communication Protocol
- The overnight charging where EBs batteries are charged at the depot overnight with slow chargers (typically 40–120 kW).
- The opportunity charging where EBs batteries are charged at bus stops (up to 600 kW) or terminals (usually between 150 to 500 kW) mainly using over-head pantographs.
2.2. Optimization Tool for the Management of the EBs Fleet Charging
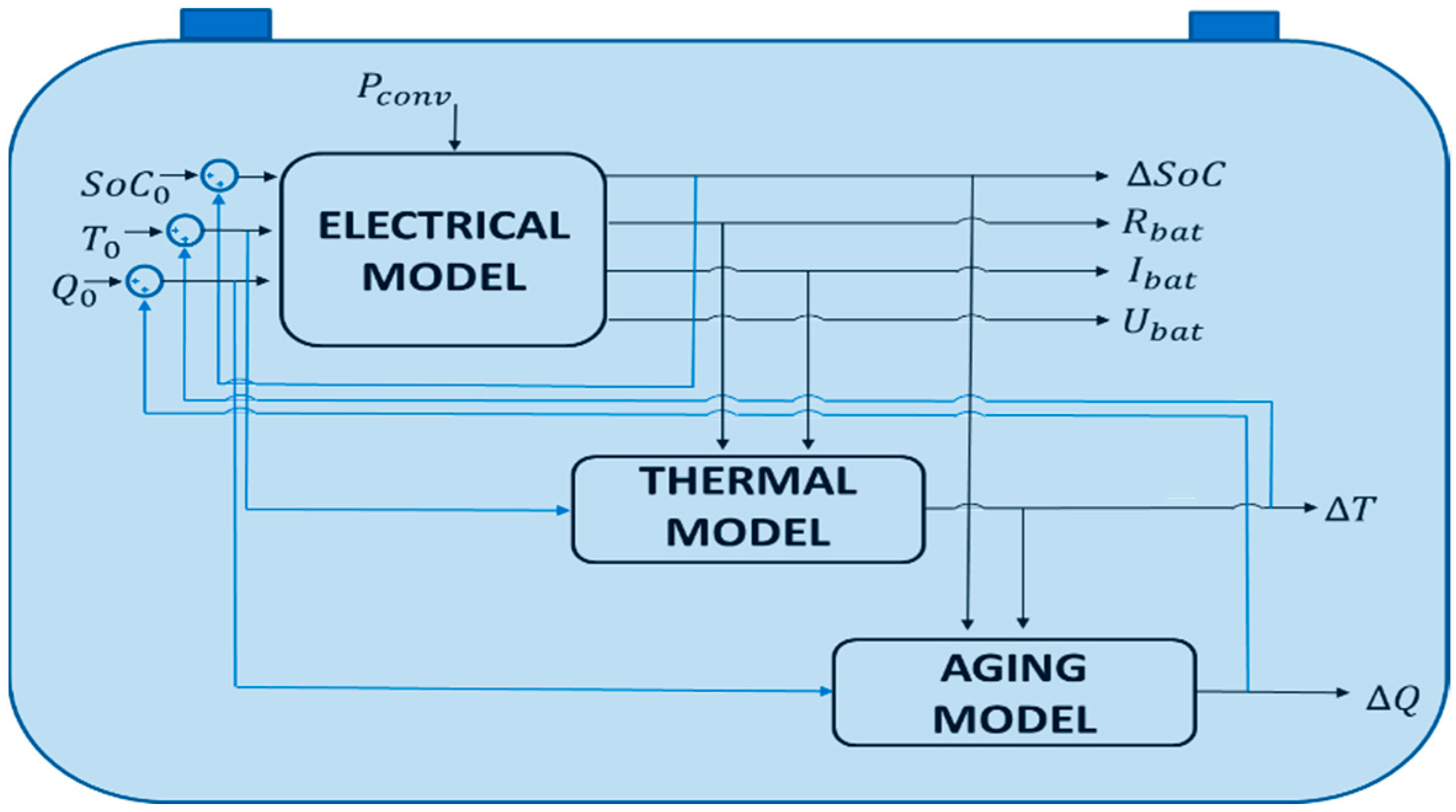
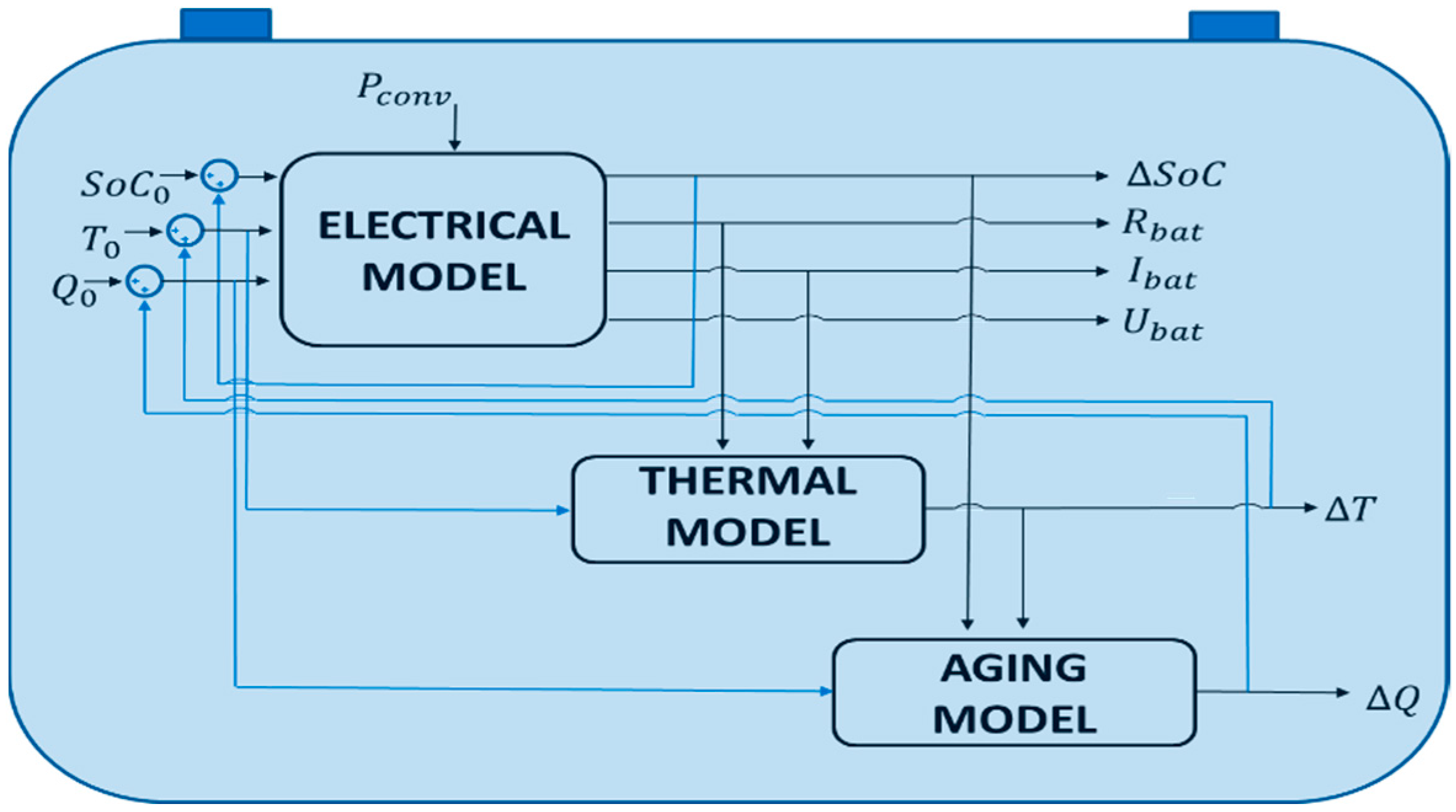
2.3. Electro-Thermal and Aging Coupled Model
2.3.1. Battery Electrical Model
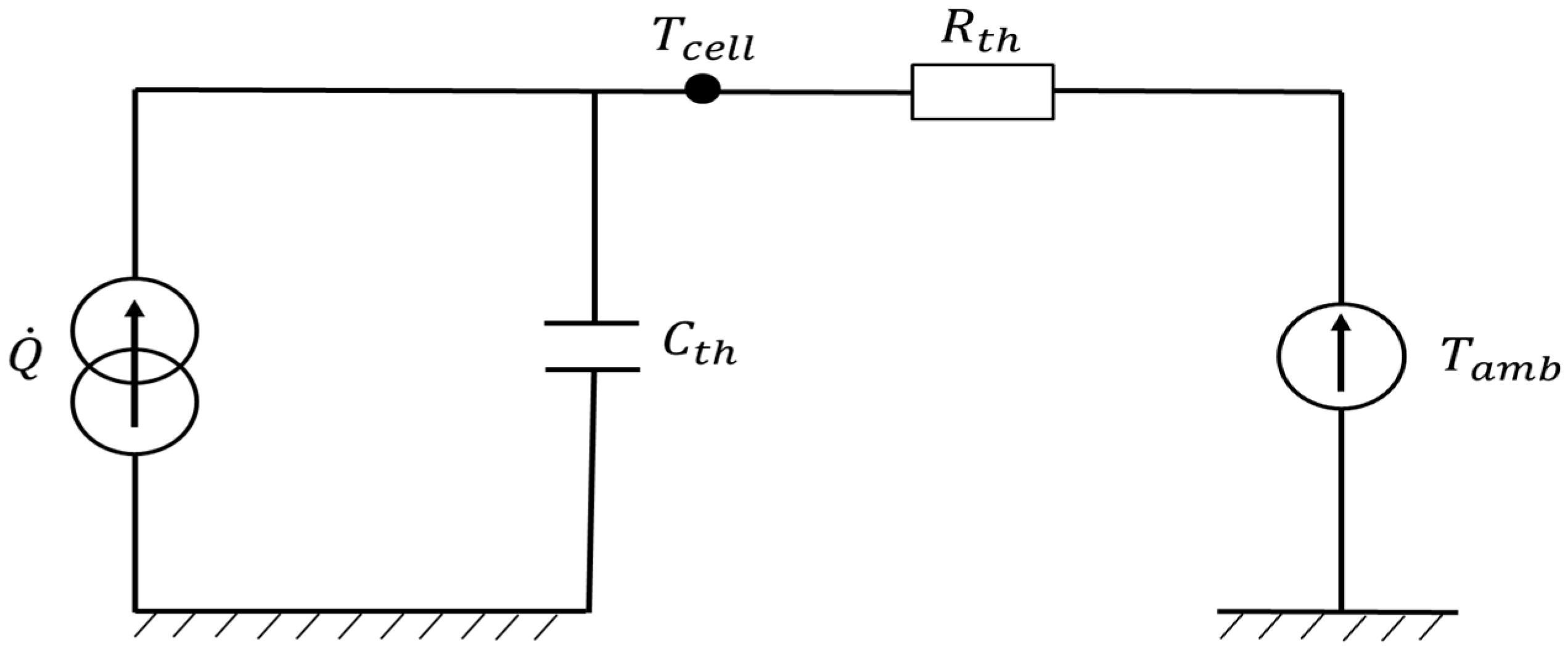
2.3.2. Battery Thermal Model
2.3.3. Battery Aging Model
2.3.4. Electro-Thermal and Aging Coupled Battery Model
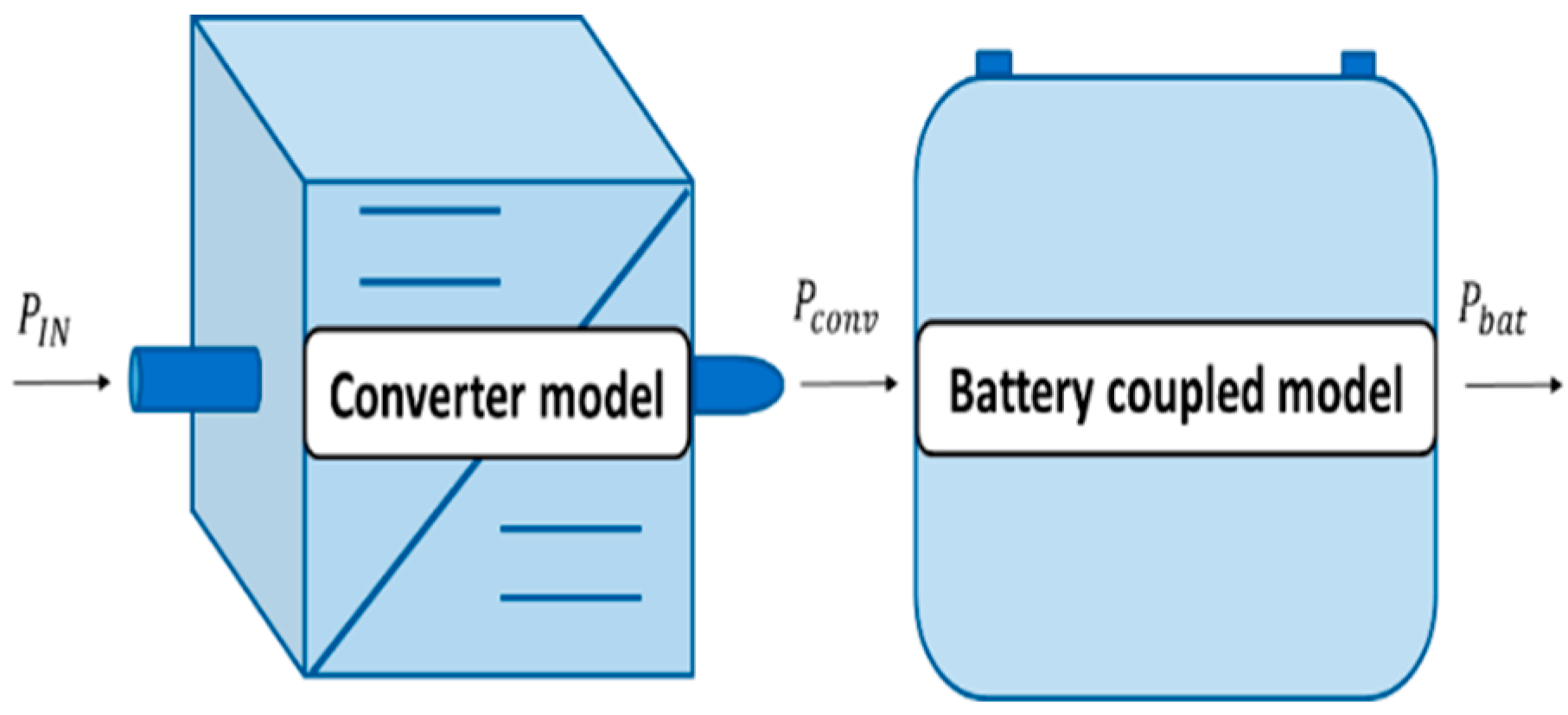
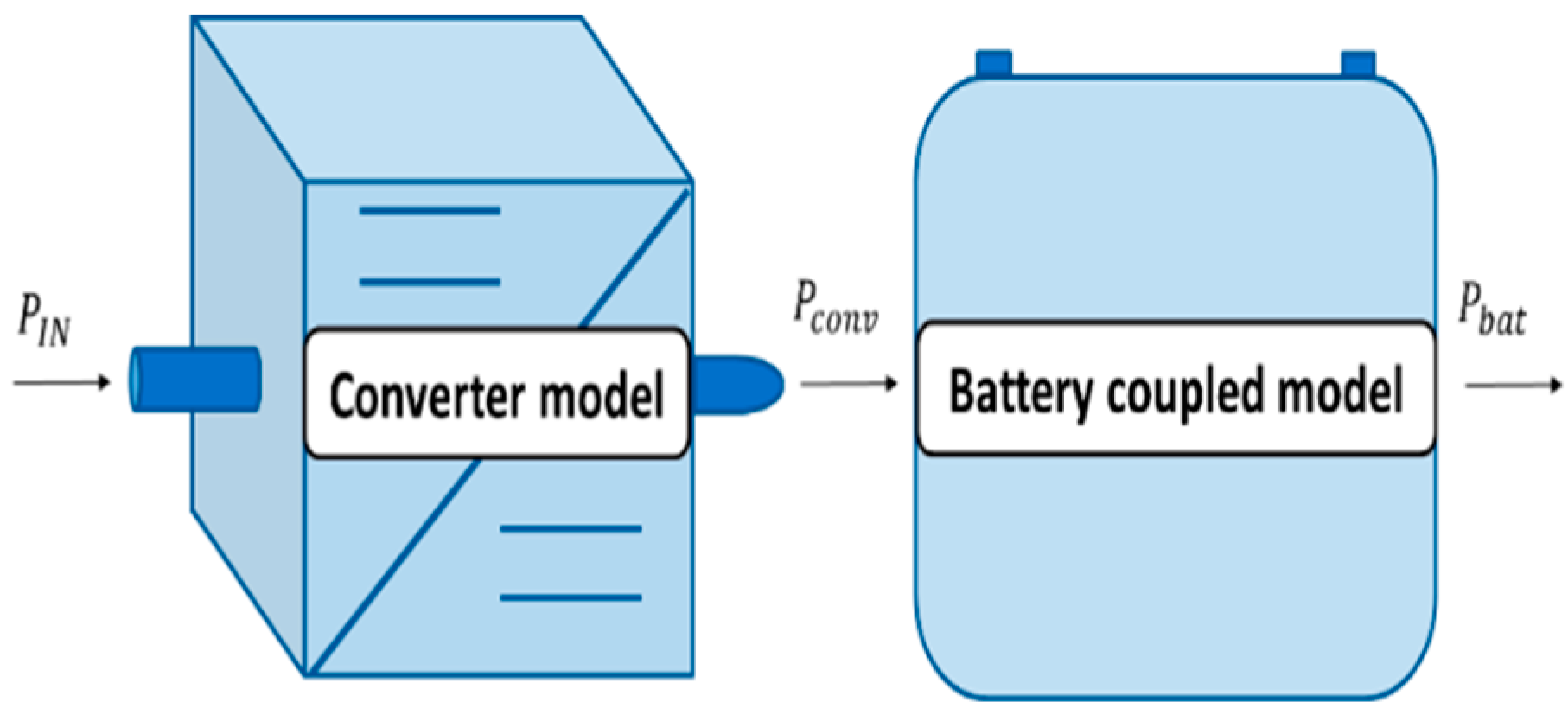
2.3.5. Converter Model
3. Optimization Problem Formulation
3.1. Literature Review of Large-Scale EBs Smart Charging Algorithms
3.2. Nonlinear Programming Optimization (NLP)
3.3. Pre-Optimization Process
3.4. Optimization Design Variable
3.5. Objective Function
3.6. Linear Equality and Inequality Constraints
3.7. Nonlinear Equality and Inequality Constraints
| Code 1 Proposed optimization steps |
| 1- Initialize the number of buses |
| 2- Define the linear (in)equalities and lower/upper bounds: lb, ub, A, B, C |
| ; ; |
| (Pre-optimization process) |
| 3- Define the nonlinear equalities: |
| 4- Define randomly an initial point (n×m) matrix |
| 5- Define the objective function |
| 6- Optimization process |
| for i = 1: MaxIter |
| Calculate Gradient around current point |
| Generate the next solution |
| Evaluate the next solution fun () |
| Report the optimum solution |
| end |
| 7- Optimization results: |
| An optimal charging power depending on objectives and respecting all the constraints |
4. Case Study
5. Results and Discussions
5.1. Optimization of the Aging Cost for One EB Charging
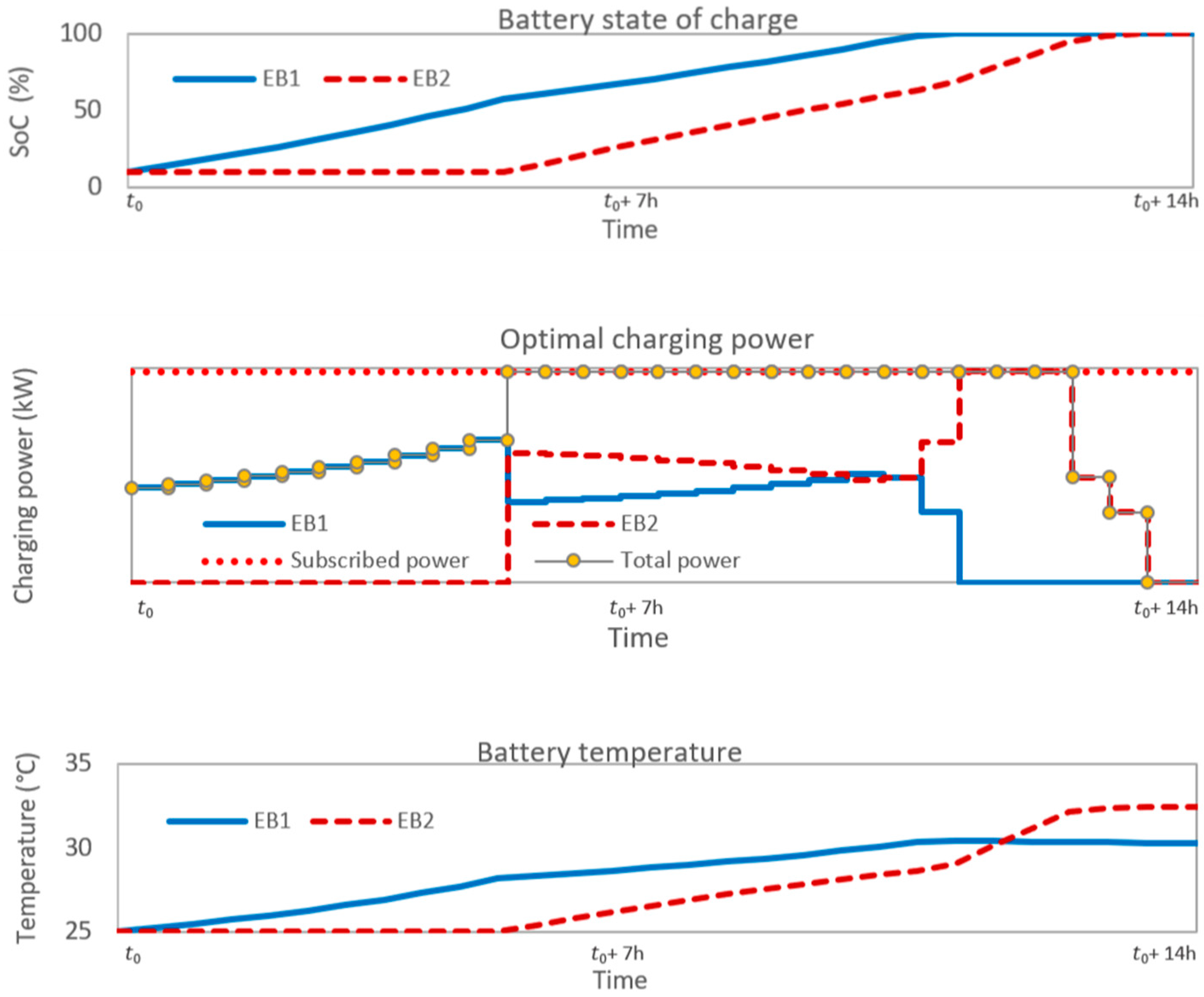
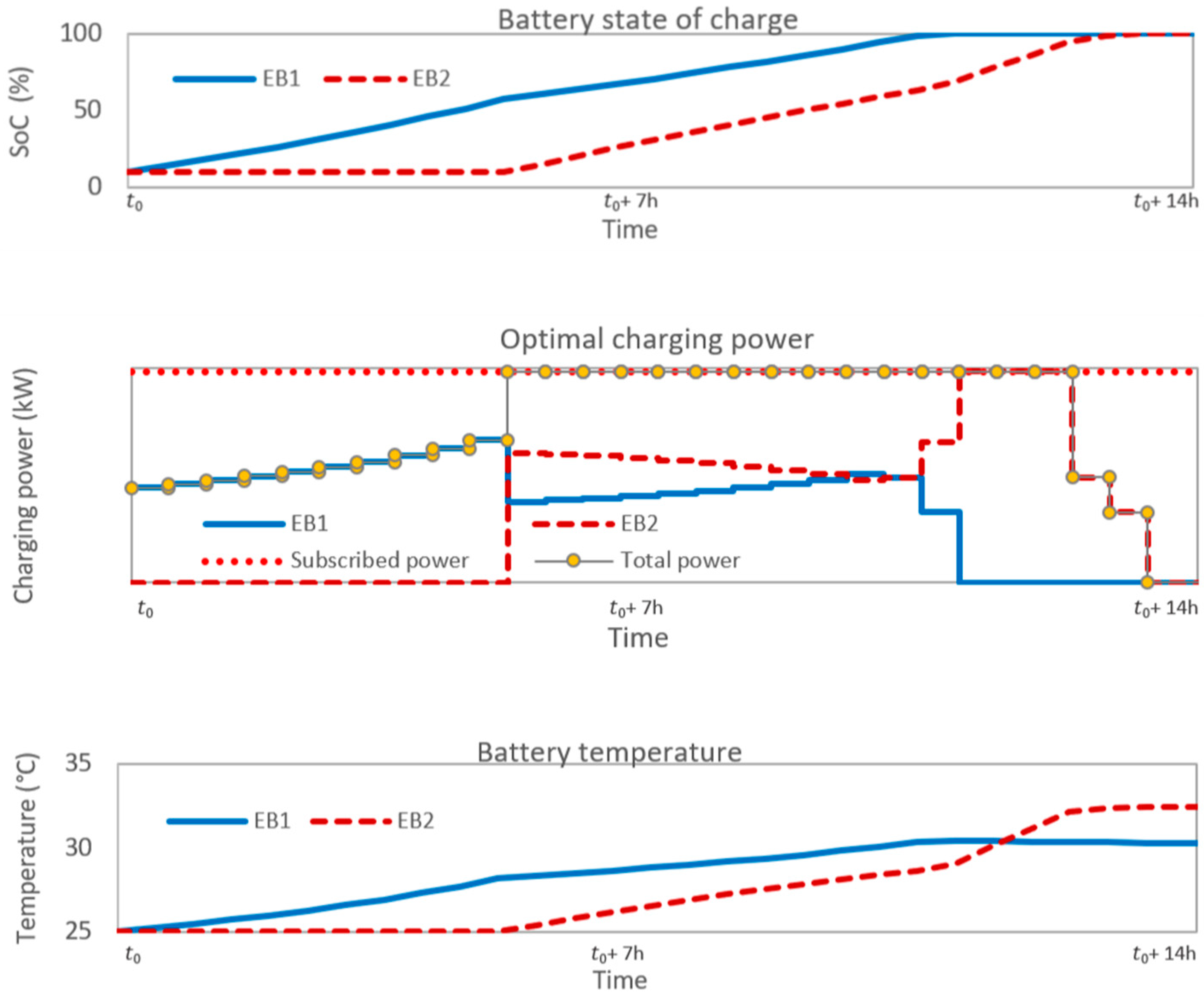
5.2. Optimization of the Aging Cost for Two EBs Charging
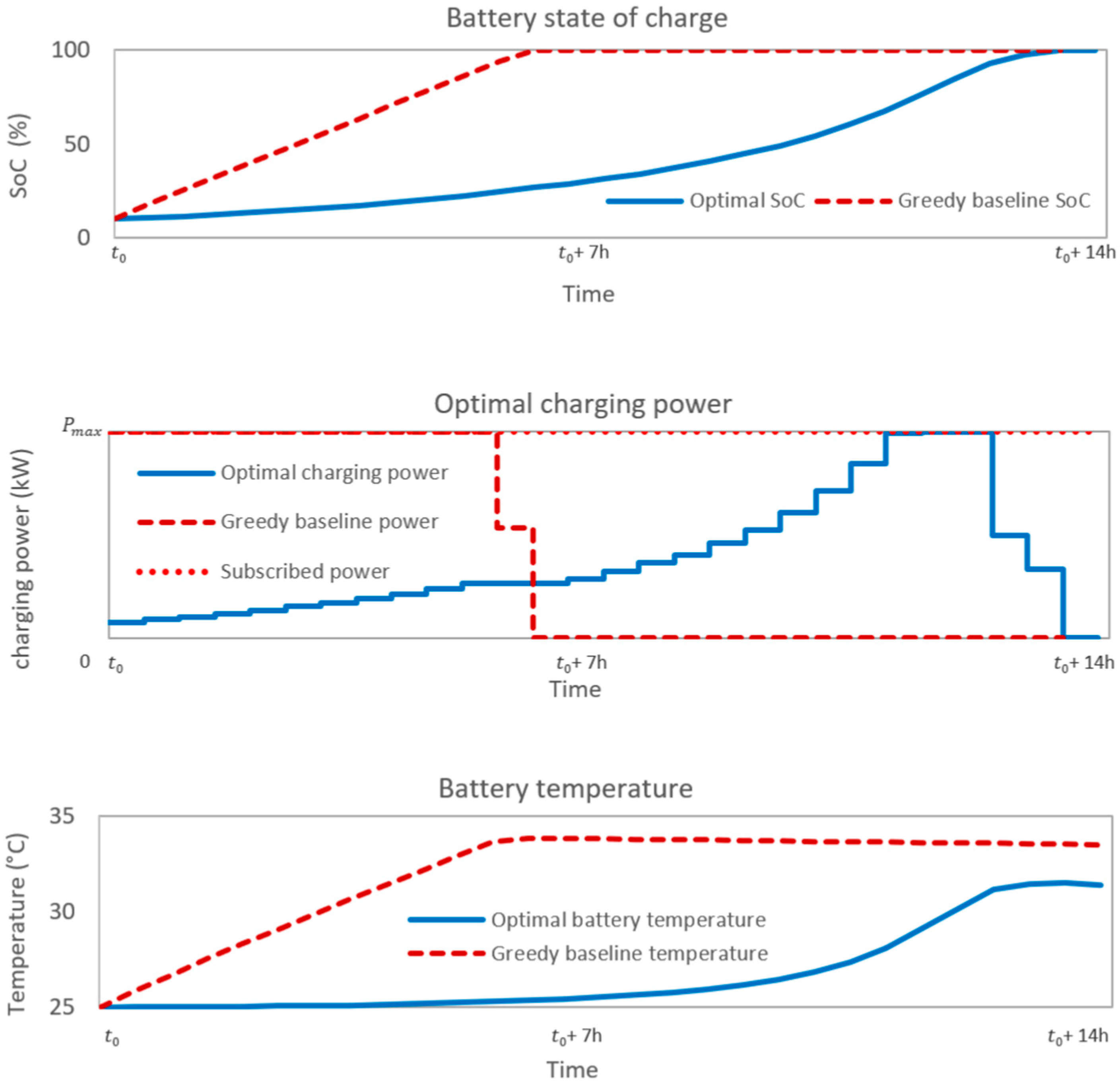
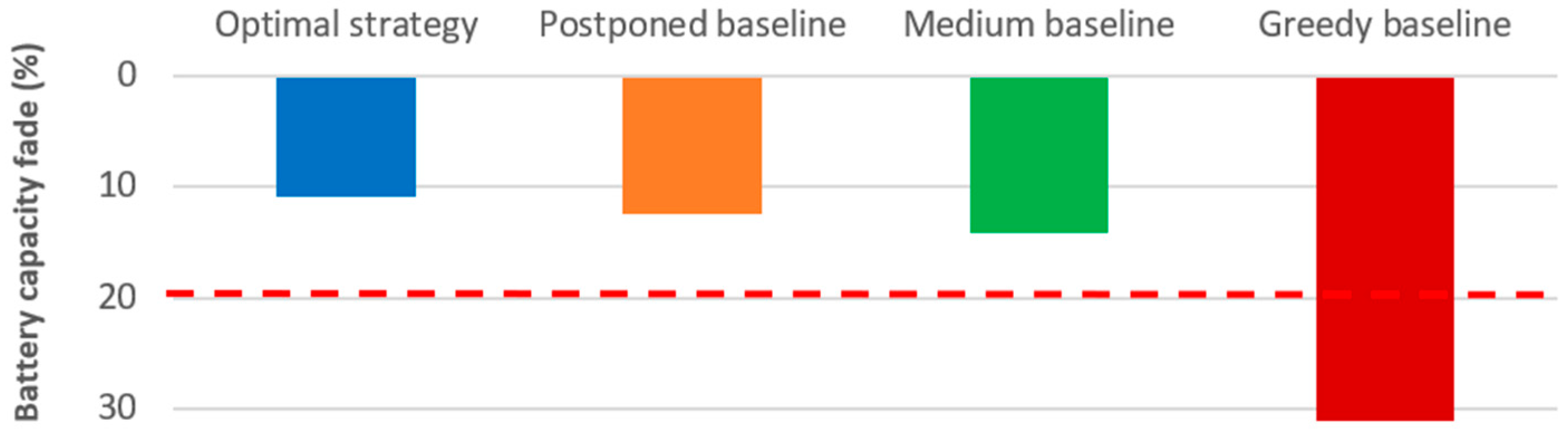
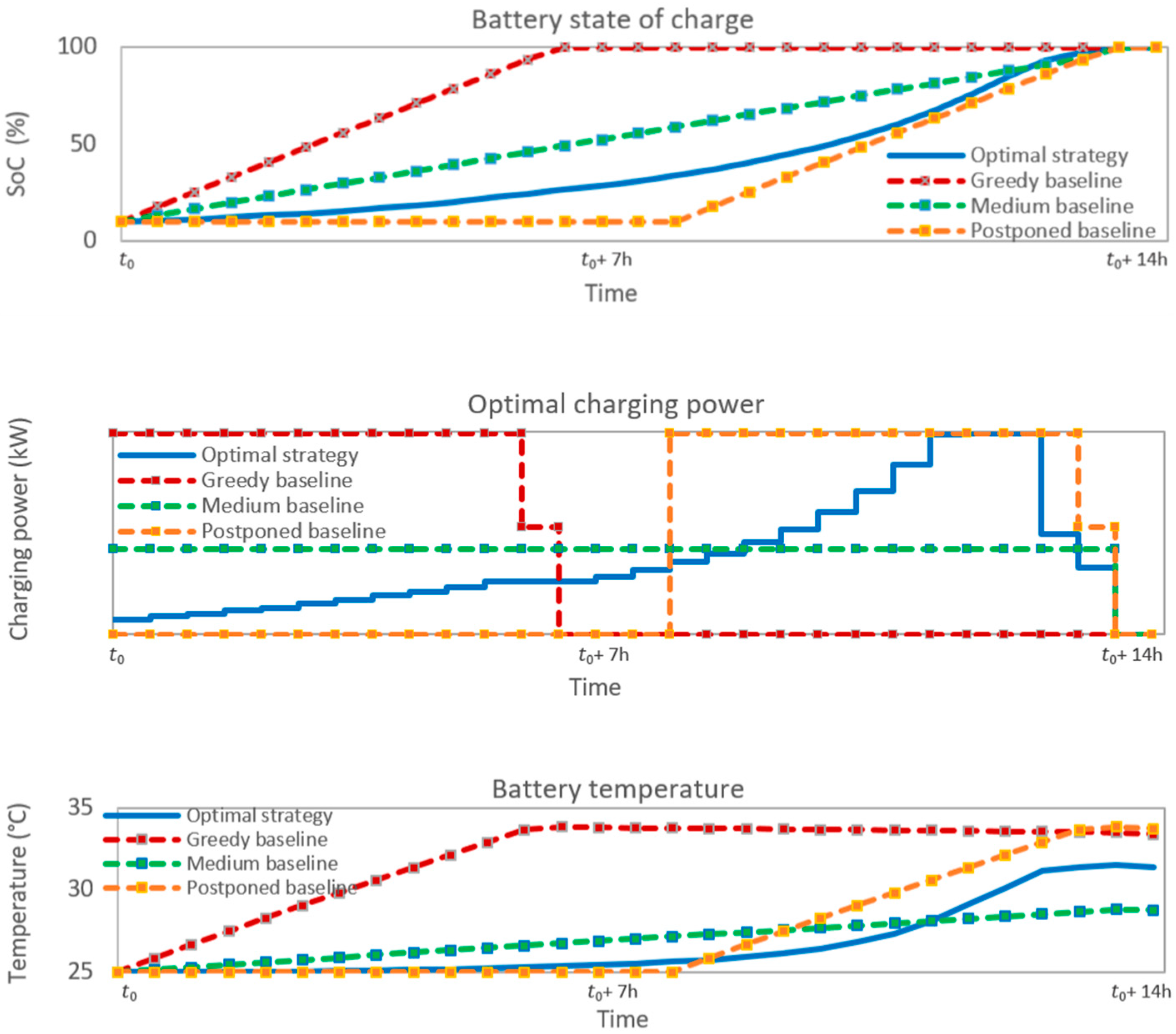
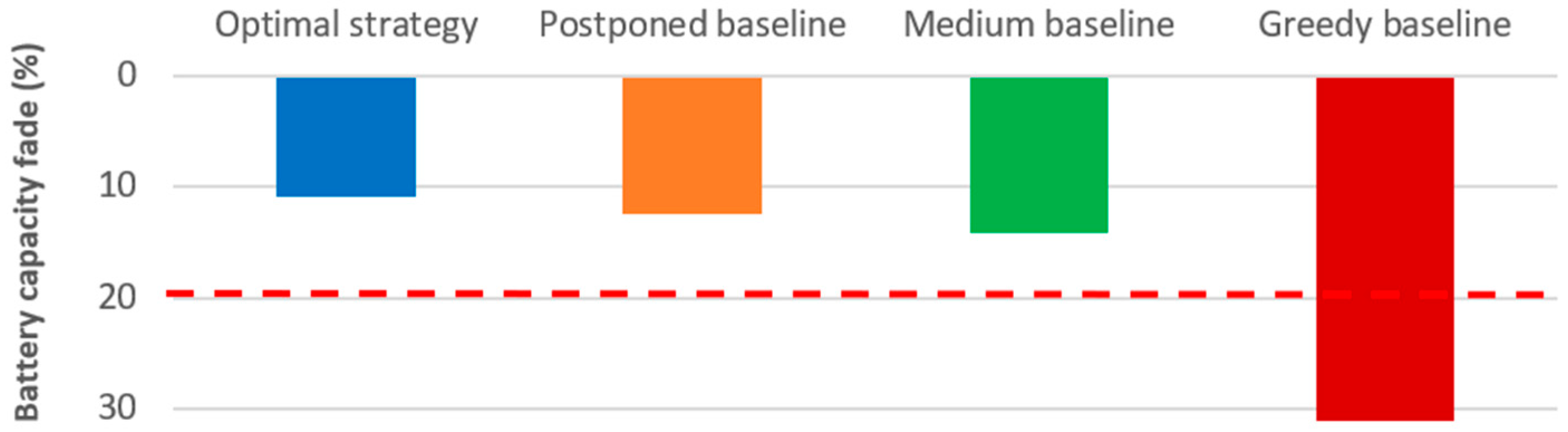
5.3. Baseline Comparison and Annual Cost Review
- The “Greedy” baseline represents one typical behavior where the EB is charged with the maximum power as soon as possible, ignoring charging cost, until it is fully charged.
- The “Medium” baseline represents one typical behavior where the EB is charged with an average power during the full charging time.
- The “Postponed” baseline represents one typical behavior where the charging of the EB is postponed as late as possible.
6. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| EVs | Electric vehicles. |
| EBs | Electric buses. |
| EVSE | Electric vehicle supply equipment. |
| V2G | Vehicle to grid |
| SoC | State of charge. |
| OCV | Open circuit voltage. |
| EOL | End of life. |
| CV | Constant voltage. |
| CC | Constant current. |
| DC | Direct current. |
| CCS | Combined charging system. |
| PLC | Power-line communication. |
| NLP | Nonlinear programming. |
| NSGA | Non-dominated Sorting Genetic Algorithm. |
References
- Dietmannsberger, M.; Schumann, M.; Meyer, M.; Schulz, D. Modelling the Electrification of Bus Depots using Real Data: Consequences for the Distribution Grid and Operational Requirements. In Proceedings of the 1st E-Mobility Power System Integration Symposium, Berlin, Germany, 23 October 2017. [Google Scholar]
- Marongiu, A.; Roscher, M.; Sauer, D.U. Influence of the vehicle-to-grid strategy on the aging behavior of lithium battery electric vehicles. Appl. Energy 2015, 137, 899–912. [Google Scholar] [CrossRef]
- Schoch, J.; Gaerttner, J.; Schuller, A.; Setzer, T. Enhancing electric vehicle sustainability through battery life optimal charging. Transp. Res. Part B Methodol. 2018, 112, 1–18. [Google Scholar] [CrossRef]
- Perez, H.E.; Hu, X.; Dey, S.; Moura, S.J. Optimal Charging of Li-Ion Batteries with Coupled Electro-Thermal-Aging Dynamics. IEEE Trans. Veh. Technol. 2017, 66, 7761–7770. [Google Scholar] [CrossRef]
- Su, W.; Chow, M.-Y. Computational intelligence-based energy management for a large-scale PHEV/PEV enabled municipal parking deck. Appl. Energy 2012, 96, 171–182. [Google Scholar] [CrossRef]
- Sundstrom, O.; Binding, C. Flexible Charging Optimization for Electric Vehicles Considering Distribution Grid Constraints. IEEE Trans. Smart Grid 2012, 3, 26–37. [Google Scholar] [CrossRef]
- Alonso, M.; Amaris, H.; Germain, J.; Galan, J. Optimal Charging Scheduling of Electric Vehicles in Smart Grids by Heuristic Algorithms. Energies 2014, 7, 2449–2475. [Google Scholar] [CrossRef]
- Rücker, F.; Bremer, I.; Linden, S.; Badeda, J.; Sauer, D.U. Development and Evaluation of a Battery Lifetime Extending Charging Algorithm for an Electric Vehicle Fleet. Energy Procedia 2016, 99, 285–291. [Google Scholar] [CrossRef] [Green Version]
- Galván-López, E.; Curran, T.; McDermott, J.; Carroll, P. Design of an autonomous intelligent Demand-Side Management system using stochastic optimisation evolutionary algorithms. Neurocomputing 2015, 170, 270–285. [Google Scholar] [CrossRef] [Green Version]
- Di Giorgio, A.; Liberati, F.; Canale, S. Electric vehicles charging control in a smart grid: A model predictive control approach. Control Eng. Pract. 2014, 22, 147–162. [Google Scholar] [CrossRef]
- Aziz, M.; Oda, T.; Ito, M. Battery-assisted charging system for simultaneous charging of electric vehicles. Energy 2016, 100, 82–90. [Google Scholar] [CrossRef]
- Hu, J.; Morais, H.; Sousa, T.; Lind, M. Electric vehicle fleet management in smart grids: A review of services, optimization and control aspects. Renew. Sustain. Energy Rev. 2016, 56, 1207–1226. [Google Scholar] [CrossRef]
- Rinaldi, M.; Parisi, F.; Laskaris, G.; D’Ariano, A.; Viti, F. Optimal dispatching of electric and hybrid buses subject to scheduling and charging constraints. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 41–46. [Google Scholar]
- Gao, Y.; Guo, S.; Ren, J.; Zhao, Z.; Ehsan, A.; Zheng, Y. An Electric Bus Power Consumption Model and Optimization of Charging Scheduling Concerning Multi-External Factors. Energies 2018, 11, 2060. [Google Scholar] [CrossRef]
- Jahic, A.; Eskander, M.; Schulz, D. Charging Schedule for Load Peak Minimization on Large-Scale Electric Bus Depots. Appl. Sci. 2019, 9, 1748. [Google Scholar] [CrossRef]
- Guyot, R.; Lasserre, B.; Vicente, J.-L.; Torcheux, L.; Martin, L. Use of data for electric transport network optimization. Optimal charging at bus depots. In Proceedings of the Electric Vehicle Symposium EVS-32, Lyon, France, 19–22 Mai 2019. [Google Scholar]
- Jiang, M.; Zhang, Y.; Zhang, Y.; Zhang, C.; Zhang, K.; Zhang, G.; Zhao, Z. Operation and Scheduling of Pure Electric Buses under Regular Charging Mode. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Leou, R.-C.; Hung, J.-J. Optimal Charging Schedule Planning and Economic Analysis for Electric Bus Charging Stations. Energies 2017, 10, 483. [Google Scholar] [CrossRef]
- Chen, H.; Hu, Z.; Xu, Z.; Li, J.; Zhang, H.; Xia, X.; Ning, K.; Peng, M. Coordinated charging strategies for electric bus fast charging stations. In Proceedings of the IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016. [Google Scholar]
- Wang, G.; Xie, X.; Zhang, F.; Liu, Y.; Zhang, D. bCharge: Data-Driven Real-Time Charging Scheduling for Large-Scale Electric Bus Fleets. In Proceedings of the 2018 IEEE Real-Time Systems Symposium (RTSS), Nashville, TN, USA, 11–14 December 2018; pp. 45–55. [Google Scholar]
- Zhu, T.; Min, H.; Yu, Y.; Zhao, Z.; Xu, T.; Chen, Y.; Li, X.; Zhang, C. An Optimized Energy Management Strategy for Preheating Vehicle-Mounted Li-ion Batteries at Subzero Temperatures. Energies 2017, 10, 243. [Google Scholar] [CrossRef]
- He, Y.; Song, Z.; Liu, Z. Fast-charging station deployment for battery electric bus systems considering electricity demand charges. Sustain. Cities Soc. 2019, 48, 101530. [Google Scholar] [CrossRef] [Green Version]
- Rogge, M.; van der Hurk, E.; Larsen, A.; Sauer, D.U. Electric bus fleet size and mix problem with optimization of charging infrastructure. Appl. Energy 2018, 211, 282–295. [Google Scholar] [CrossRef] [Green Version]
- Lai, C.S.; Jia, Y.; Xu, Z.; Lai, L.L.; Li, X.; Cao, J.; McCulloch, M.D. Levelized cost of electricity for photovoltaic/biogas power plant hybrid system with electrical energy storage degradation costs. Energy Convers. Manag. 2017, 153, 34–47. [Google Scholar] [CrossRef]
- Lai, C.S.; Locatelli, G.; Pimm, A.; Tao, Y.; Li, X.; Lai, L.L. A financial model for lithium-ion storage in a photovoltaic and biogas energy system. Appl. Energy 2019, 251, 113179. [Google Scholar] [CrossRef]
- Houbbadi, A.; Trigui, R.; Pelissier, S.; Bouton, T.; Redondo-Iglesias, E. Multi-Objective Optimisation of the Management of Electric Bus Fleet Charging. In Proceedings of the 2017 IEEE Vehicle Power and Propulsion Conference (VPPC), Belfort, France, 11–14 December 2017; pp. 1–6. [Google Scholar]
- Houbbadi, A.; Trigui, R.; Pelissier, S.; Bouton, T.; Redondo-Iglesias, E. A quadratic programming based optimisation to manage electric bus fleet charging. International Journal of Electric and Hybrid Vehicles (IJEHV), Inderscience Publishers: Geneva, Switzerland, 2019; in press. [Google Scholar]
- Electric Buses Arrive on Time. Available online: https://www.transportenvironment.org/ publications/electric-buses-arrive-time/ (accessed on 4 July 2019).
- IEC 61851-An International Standard for Electric Vehicle Conductive Charging Systems. Available online: https://webstore.iec.ch/publication/33644/ (accessed on 30 September 2018).
- Lewandowski, C.; Groning, S.; Schmutzler, J.; Wietfeld, C. Interference analyses of Electric Vehicle charging using PLC on the Control Pilot. In Proceedings of the 2012 IEEE International Symposium on Power Line Communications and Its Applications, Beijing, China, 27–30 March 2012; pp. 350–355. [Google Scholar]
- Mouli, G.R.C.; Kaptein, J.; Bauer, P.; Zeman, M. Implementation of dynamic charging and V2G using Chademo and CCS/Combo DC charging standard. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 27–29 June 2016; pp. 1–6. [Google Scholar]
- Nikdel, M. Various battery models for various simulation studies and applications. Renew. Sustain. Energy Rev. 2014, 32, 477–485. [Google Scholar]
- Trigui, R.; Jeanneret, B.; Badin, F. Systemic modelling of hybrid vehicles in order to predict dynamic performance and energy consumption building the VEHLIB library of models. RTS-Rech. Transp. Secur. 2004, 21, 129–150. [Google Scholar] [CrossRef]
- Jaguemont, J.; Boulon, L.; Dubé, Y. A comprehensive review of lithium-ion batteries used in hybrid and electric vehicles at cold temperatures. Appl. Energy 2016, 164, 99–114. [Google Scholar] [CrossRef]
- Jaguemont, J.; Boulon, L.; Dube, Y. Characterization and Modeling of a Hybrid-Electric-Vehicle Lithium-Ion Battery Pack at Low Temperatures. IEEE Trans. Veh. Technol. 2016, 65, 1–14. [Google Scholar] [CrossRef]
- Bernardi, D.; Pawlikowski, E.; Newman, J. A General Energy Balance for Battery Systems. J. Electrochem. Soc. 1985, 132, 5–12. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.; Xu, S.; Li, Z.; Li, B.; Chang, G.; Liu, J. Thermal analysis of large-capacity LiFePO4 power batteries for electric vehicles. J. Power Sources 2015, 294, 633–642. [Google Scholar] [CrossRef]
- Redondo-Iglesias, E.; Venet, P.; Pelissier, S. Global Model for Self-Discharge and Capacity Fade in Lithium-Ion Batteries Based on the Generalized Eyring Relationship. IEEE Trans. Veh. Technol. 2018, 67, 104–113. [Google Scholar] [CrossRef]
- Jaguemont, J.; Boulon, L.; Venet, P.; Dube, Y.; Sari, A. Lithium-Ion Battery Aging Experiments at Subzero Temperatures and Model Development for Capacity Fade Estimation. IEEE Trans. Veh. Technol. 2016, 65, 4328–4343. [Google Scholar] [CrossRef]
- Petit, M.; Prada, E.; Sauvant-Moynot, V. Development of an empirical aging model for Li-ion batteries and application to assess the impact of Vehicle-to-Grid strategies on battery lifetime. Appl. Energy 2016, 172, 398–407. [Google Scholar] [CrossRef]
- Genovese, A.; Ortenzi, F.; Villante, C. On the energy efficiency of quick DC vehicle battery charging. World Electr. Veh. J. 2015, 7, 570–576. [Google Scholar] [CrossRef] [Green Version]
- Byrd, R.H.; Nocedal, J.; Waltz, R.A. Knitro: An Integrated Package for Nonlinear Optimization, in Large-Scale Nonlinear Optimization. In Nonconvex Optimization and Its Applications; Di Pillo, G., Roma, M., Eds.; Springer: Boston, MA, USA, 2006; pp. 35–59. [Google Scholar]
- Shen, W.; Vo, T.T.; Kapoor, A. Charging algorithms of lithium-ion batteries: An overview. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012. [Google Scholar]
- Lai, C.S.; Jia, Y.; Lai, L.L.; Xu, Z.; McCulloch, M.D.; Wong, K.P. A comprehensive review on large-scale photovoltaic system with applications of electrical energy storage. Renew. Sustain. Energy Rev. 2017, 78, 439–451. [Google Scholar] [CrossRef]
- Pillot, C. Lithium ion battery raw material supply & demand 2016–2025. In Proceedings of the Advanced Automotive Battery Conference, Mainz, Germany, 30 January 2017. [Google Scholar]
- Raab, A.F.; Lauth, E.; Strunz, K.; Göhlich, D. Implementation Schemes for Electric Bus Fleets at Depots with Optimized Energy Procurements in Virtual Power Plant Operations. World Electr. Veh. J. 2019, 10, 5. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Number of buses | 1 to 10 | Battery type | LIFePO4 or LFP |
| Number of simulated days | 1 day | Nominal energy/capacity | 311 kWh/540 Ah |
| Charging time period | 13 h 30 | Pack surface for thermal exchange | 18.79 m2 |
| Charging slot | 30 min | Battery pack weight | 2500 kg |
| Charging power for 1 charger | Pmax | Specific heat capacity | 900 J·kg−1·K−1 |
| Number of charging time slots | 27 | Heat transfer coefficient | 5 W·m−2·K−1 |
| Initial state of charge | 10% | A: pre-exponential factor | 4.35 107 p.u.day−1 |
| Target state of charge | 100% | : activation energy | 0.719 eV |
| Arrival & departure time | t0t0 + 14 h | k: Boltzmann constant | 8.617 10−5 eV·K−1 |
| Initial battery temperature | 25 °C | B: quantity of charge factor | 1.104 |
| Initial battery capacity fade | 0% | : Capacity loss at end of life | 0.2 p.u |
| Fixed outside temperature | 25 °C | : Battery price | 500 €·kWh−1 |
| EBs Fleet | 1 EB | 4 EBs | 10 EBs | 50 EBs | 100 EBs |
|---|---|---|---|---|---|
| NLP | 1–10 s | 10–15 s | 20 s–1 min | 5–15 min | 5–15 min |
| NSGA-II | 2 min | 20 min | 1 h | No convergence | No convergence |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Houbbadi, A.; Trigui, R.; Pelissier, S.; Redondo-Iglesias, E.; Bouton, T. Optimal Scheduling to Manage an Electric Bus Fleet Overnight Charging. Energies 2019, 12, 2727. https://doi.org/10.3390/en12142727
Houbbadi A, Trigui R, Pelissier S, Redondo-Iglesias E, Bouton T. Optimal Scheduling to Manage an Electric Bus Fleet Overnight Charging. Energies. 2019; 12(14):2727. https://doi.org/10.3390/en12142727
Chicago/Turabian StyleHoubbadi, Adnane, Rochdi Trigui, Serge Pelissier, Eduardo Redondo-Iglesias, and Tanguy Bouton. 2019. "Optimal Scheduling to Manage an Electric Bus Fleet Overnight Charging" Energies 12, no. 14: 2727. https://doi.org/10.3390/en12142727