Control Strategy of Mode Transition with Engine Start in a Plug-in Hybrid Electric Bus


Abstract
:1. Introduction
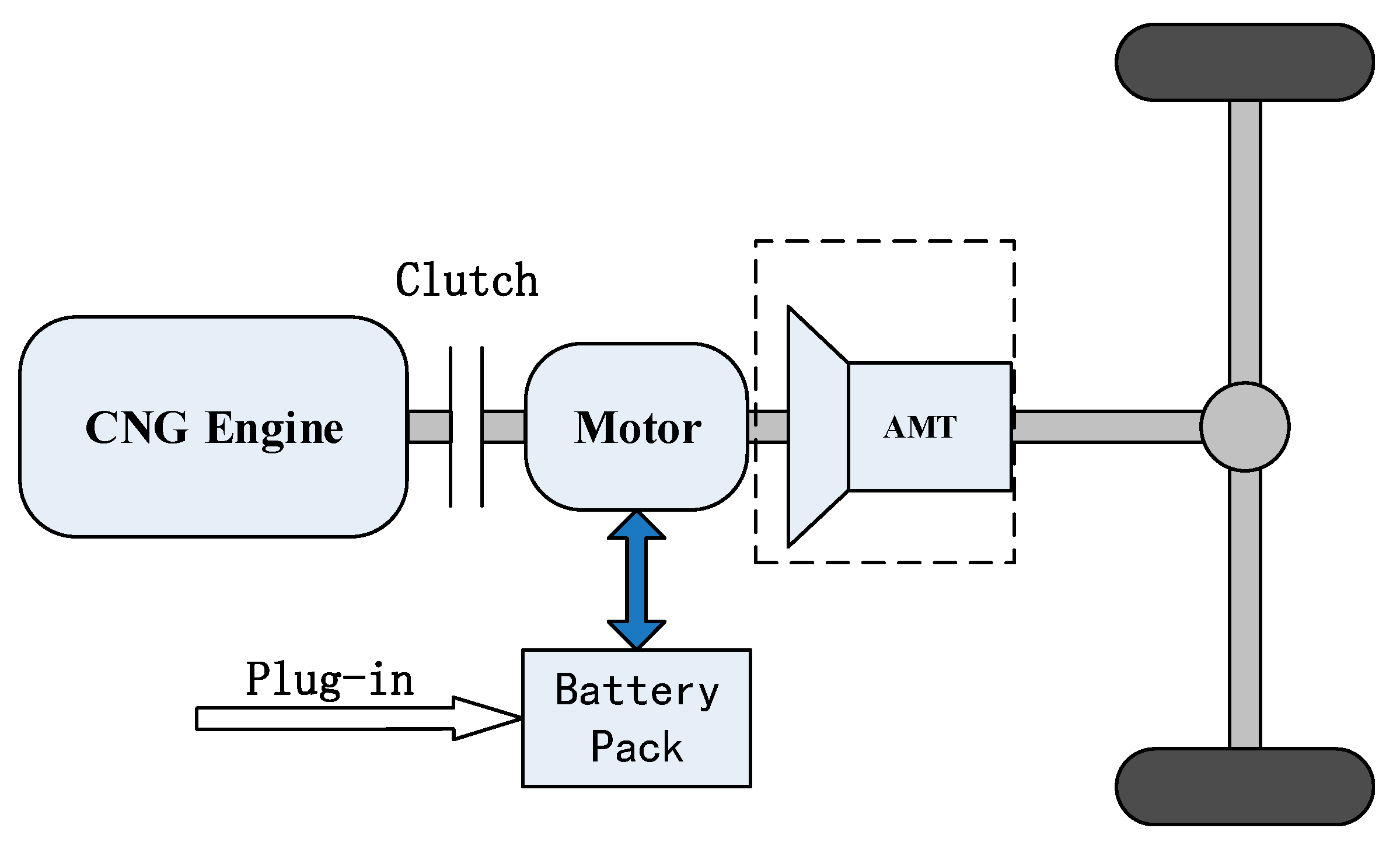
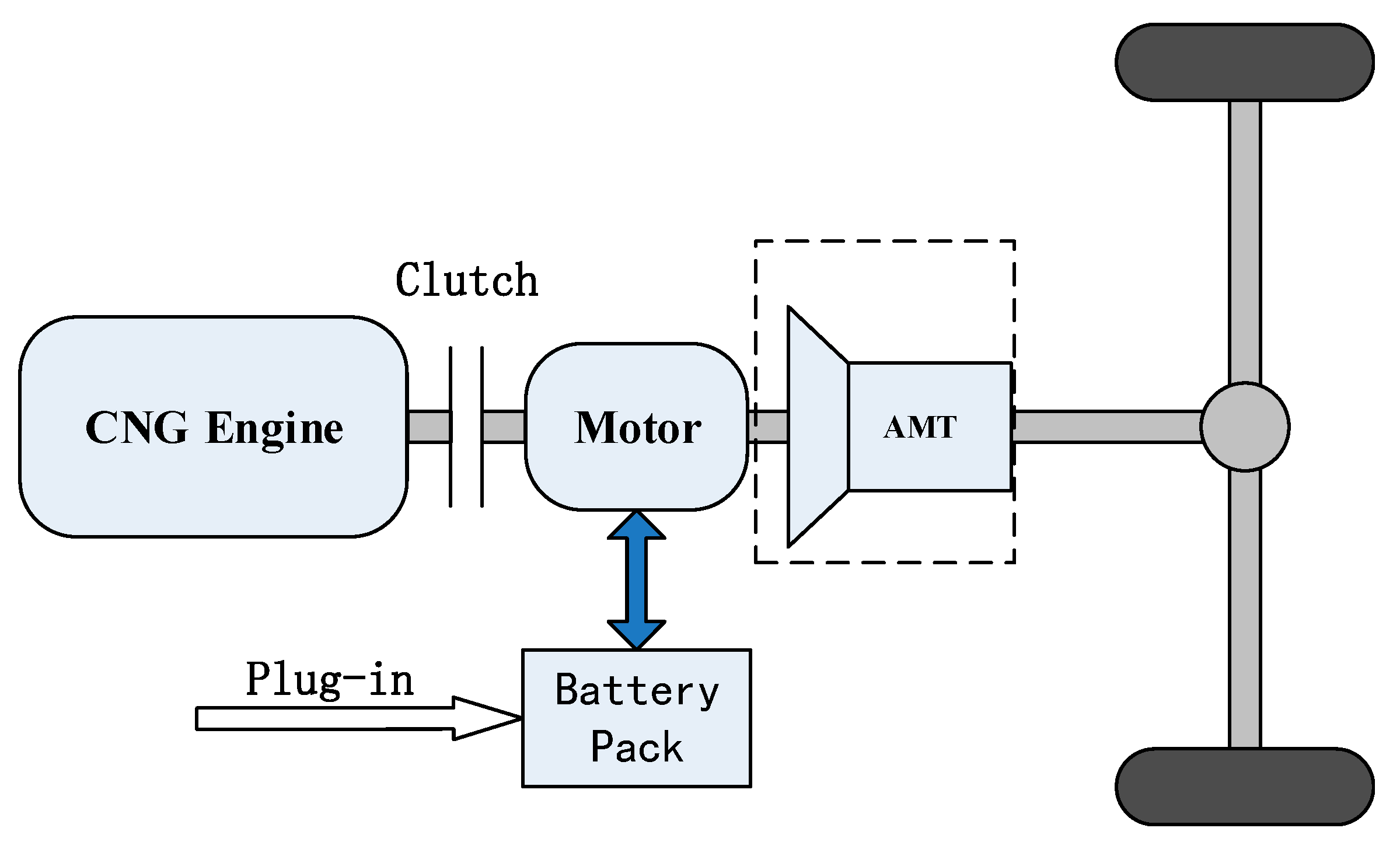
2. Powertrain
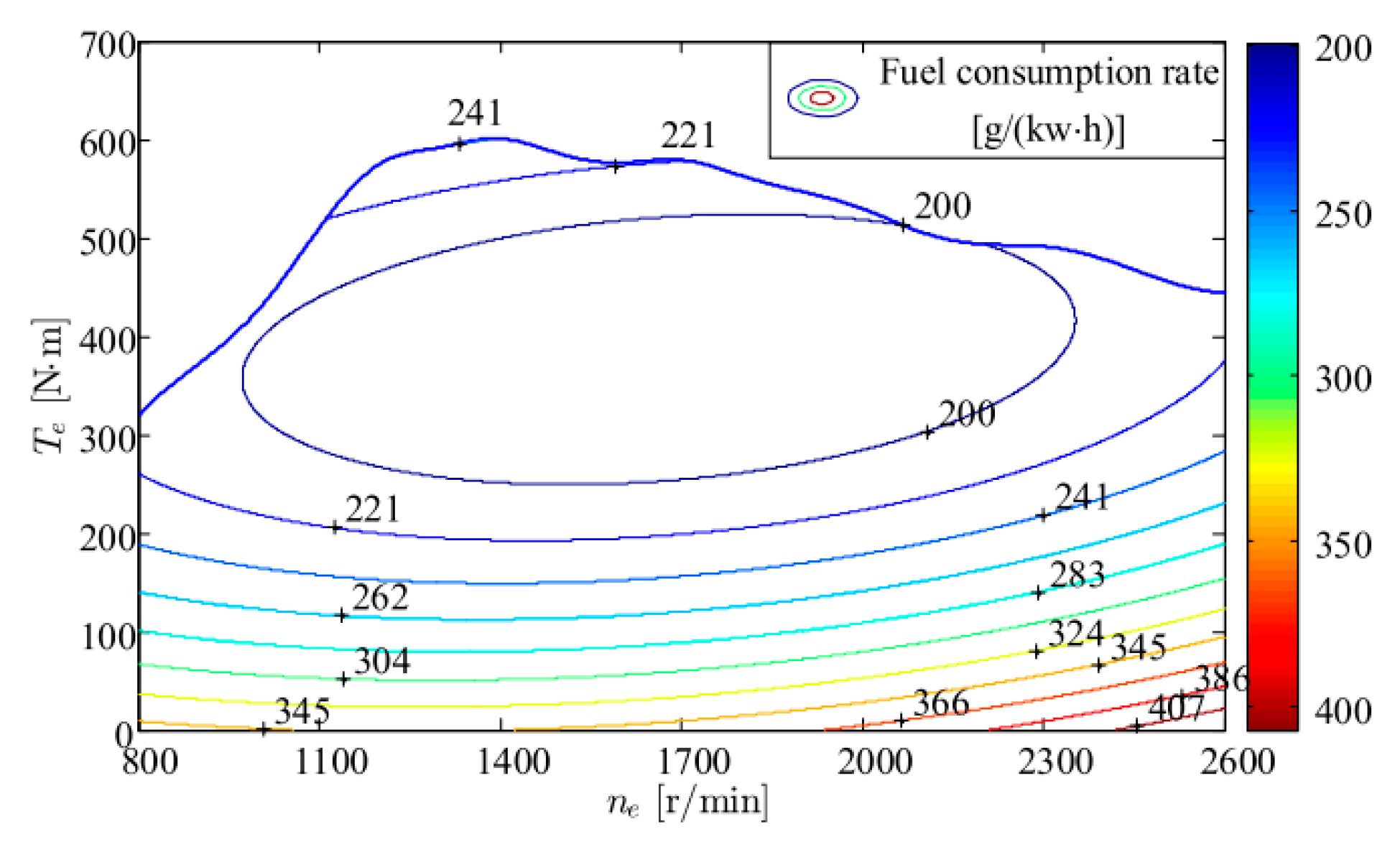
2.1. Engine Model
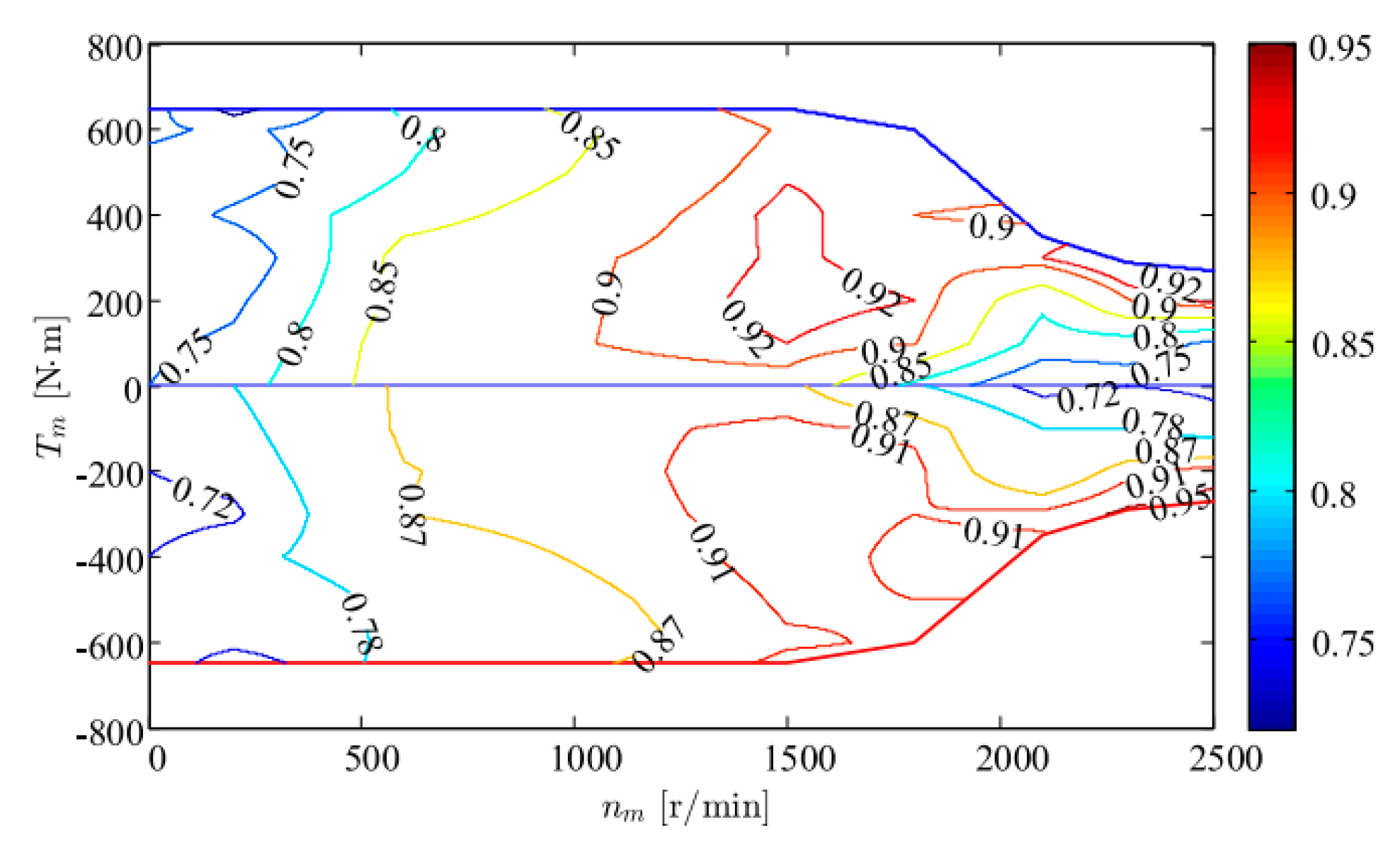
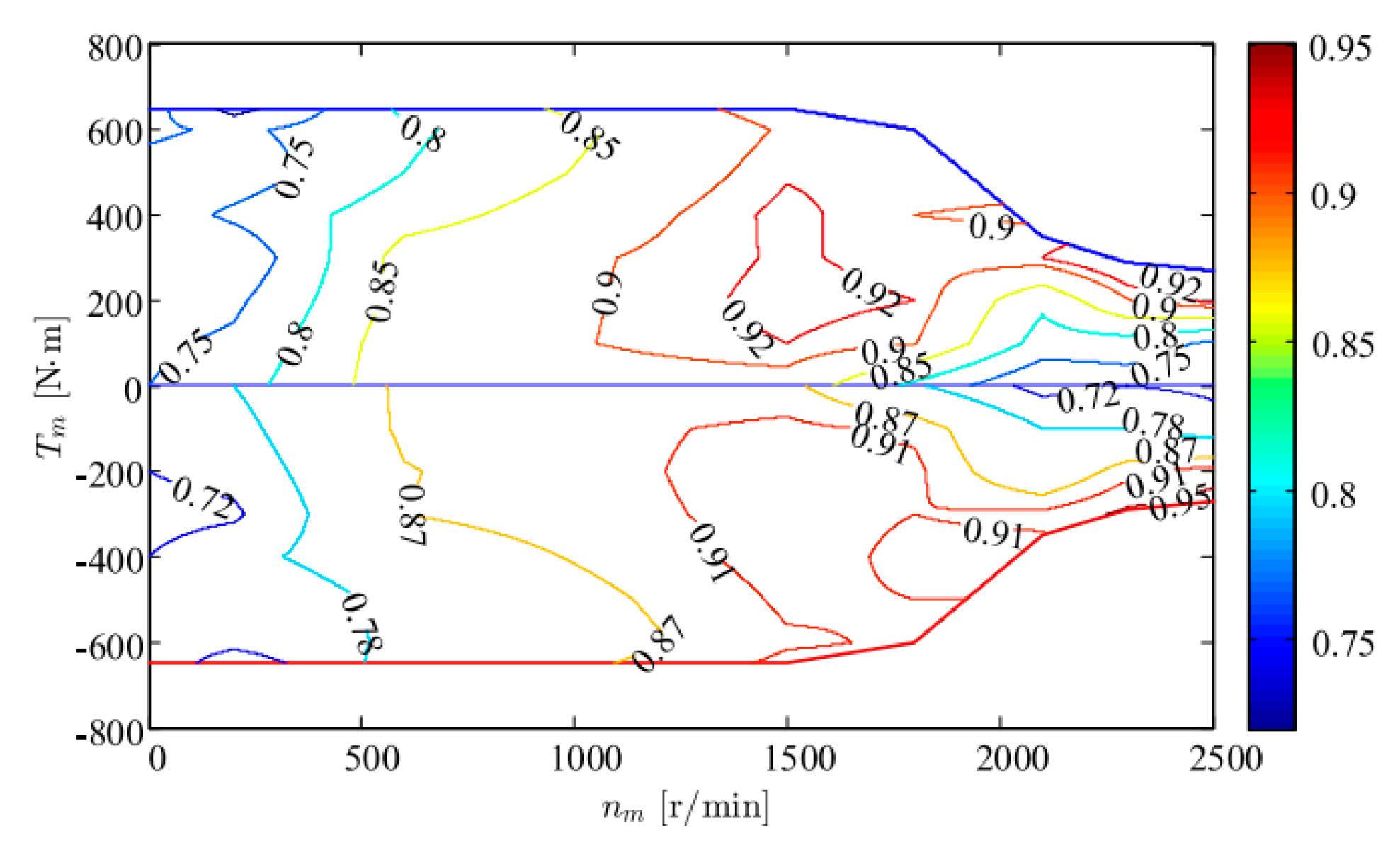
2.2. Electric Motor Model
2.3. Transmission System Model
2.4. Vehicle Longitudinal Dynamics
3. Method
3.1. Operation Mode
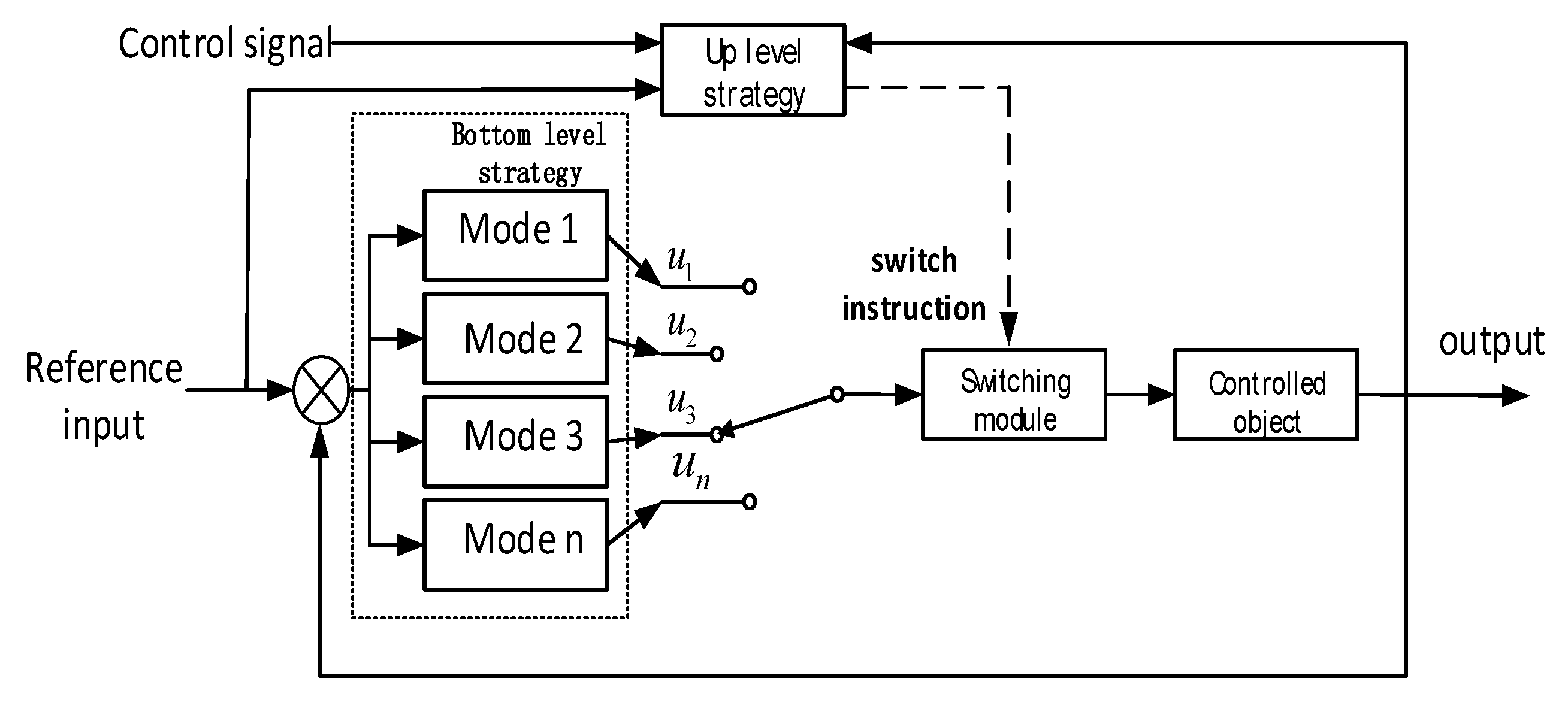
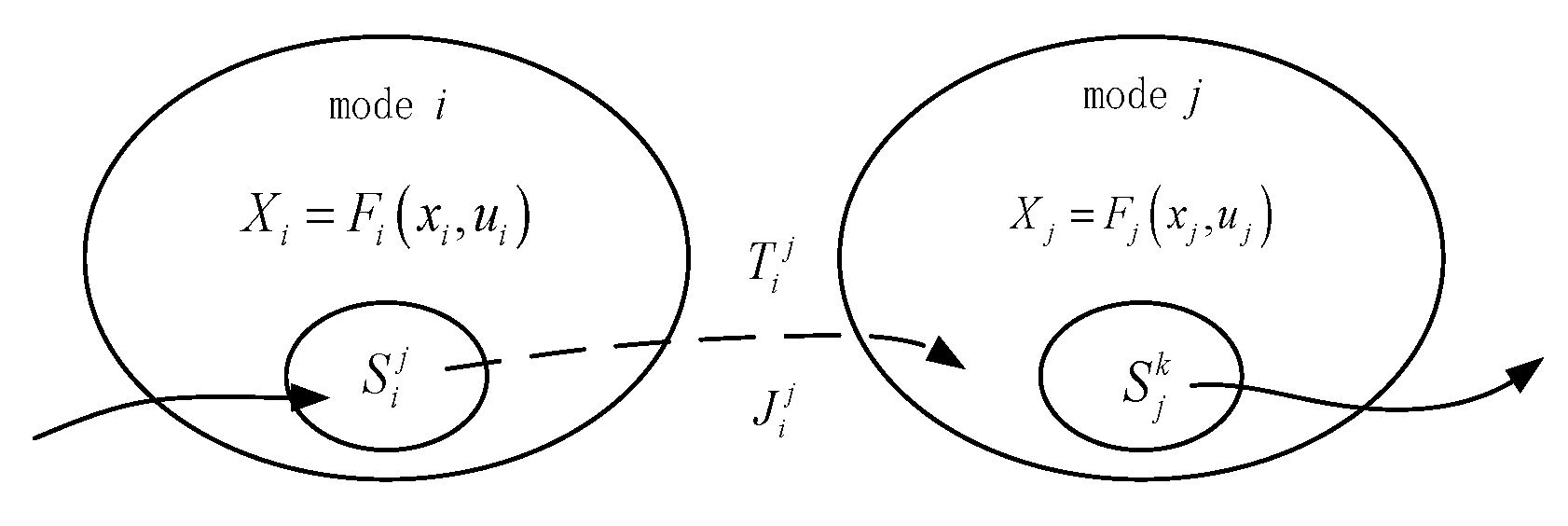
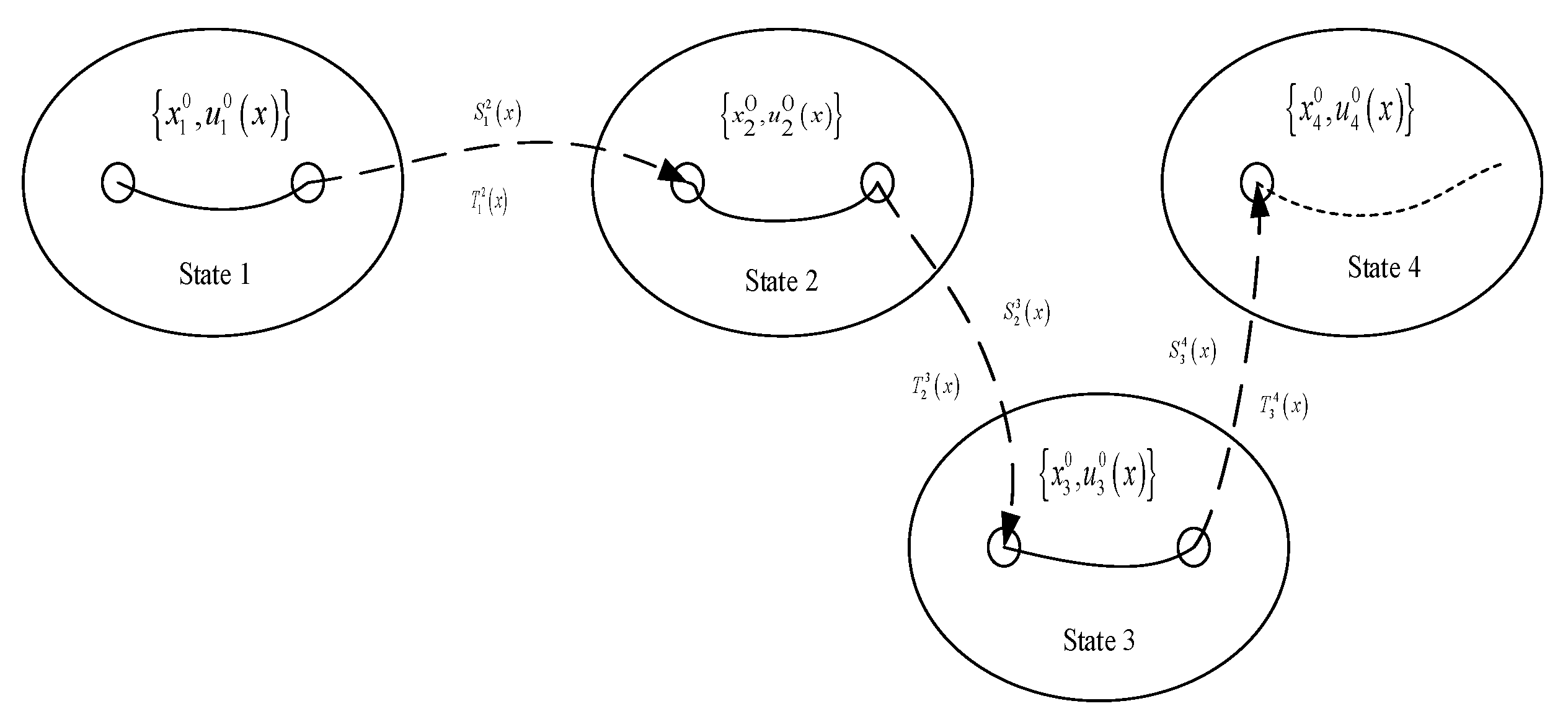
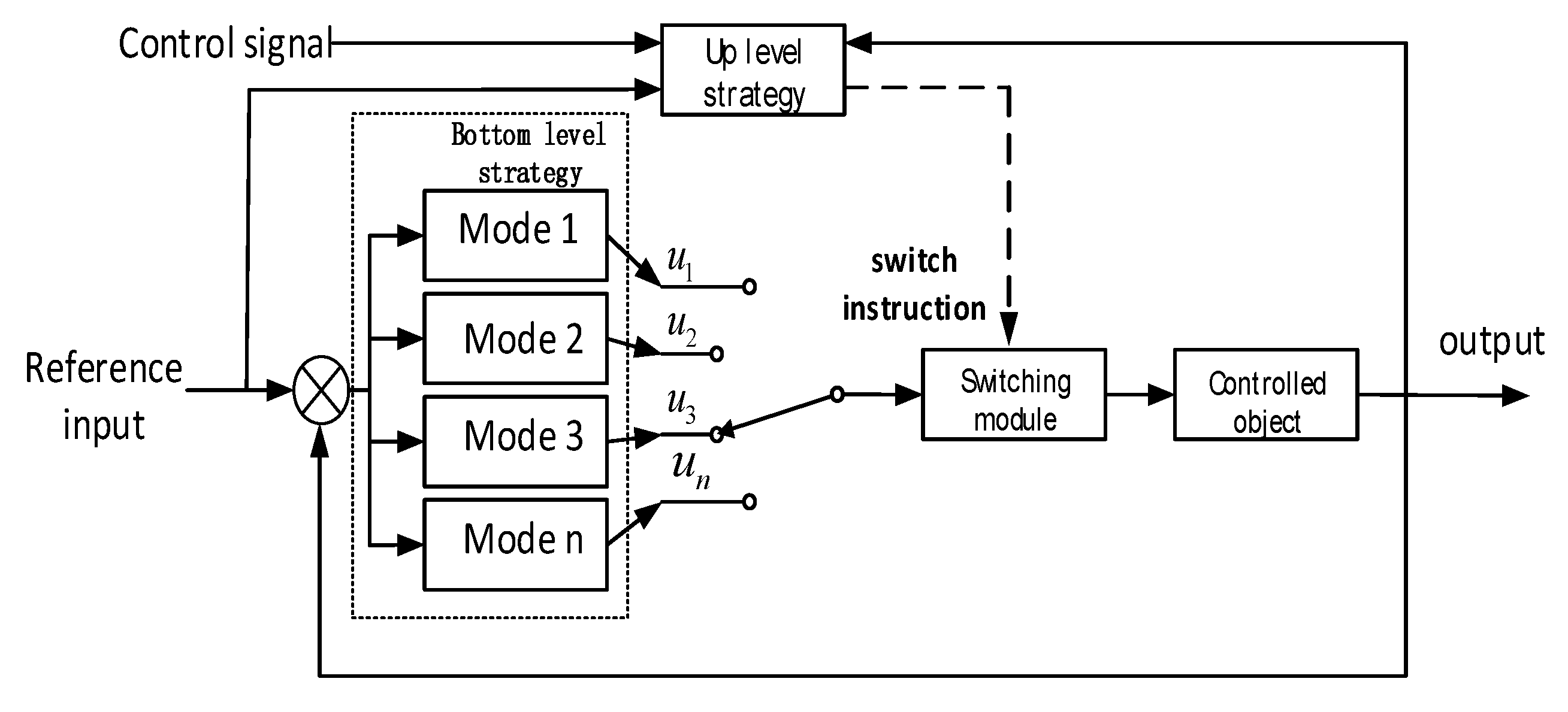
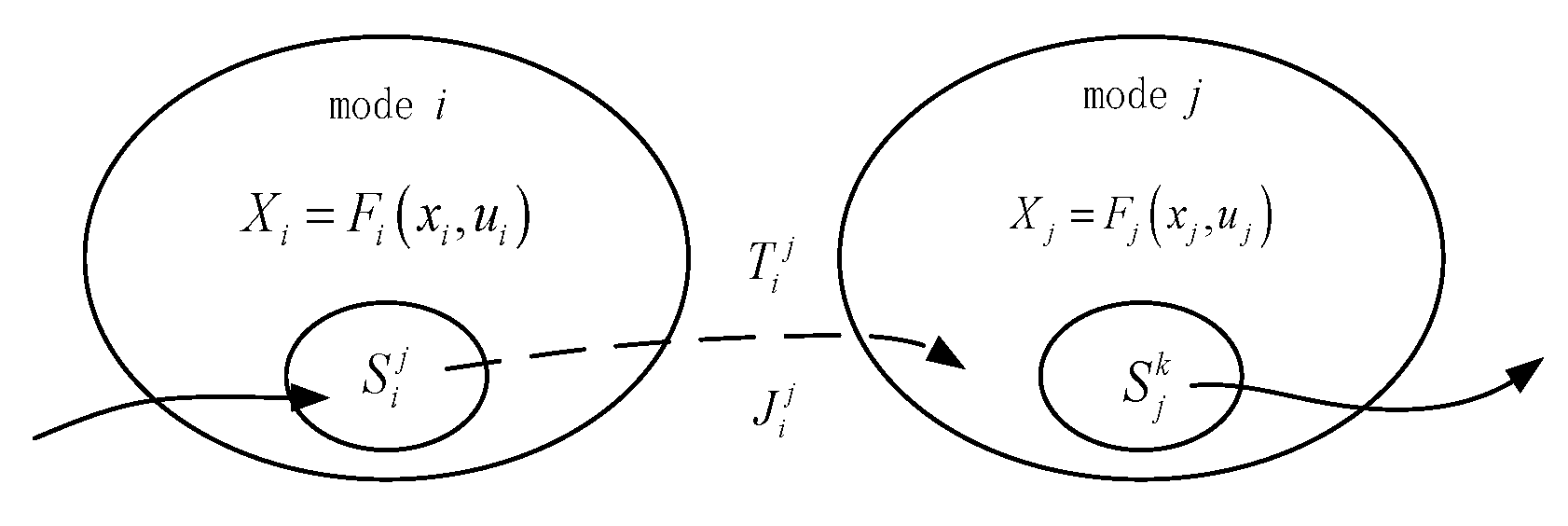
3.2. Hybrid System Switching Model
3.3. Control Design
3.3.1. Pure Electric Drive State
3.3.2. Clutch Sliding State
3.3.3. Clutch Synchronization State
3.3.4. Hybrid Drive State
4. Simulation
- (1)
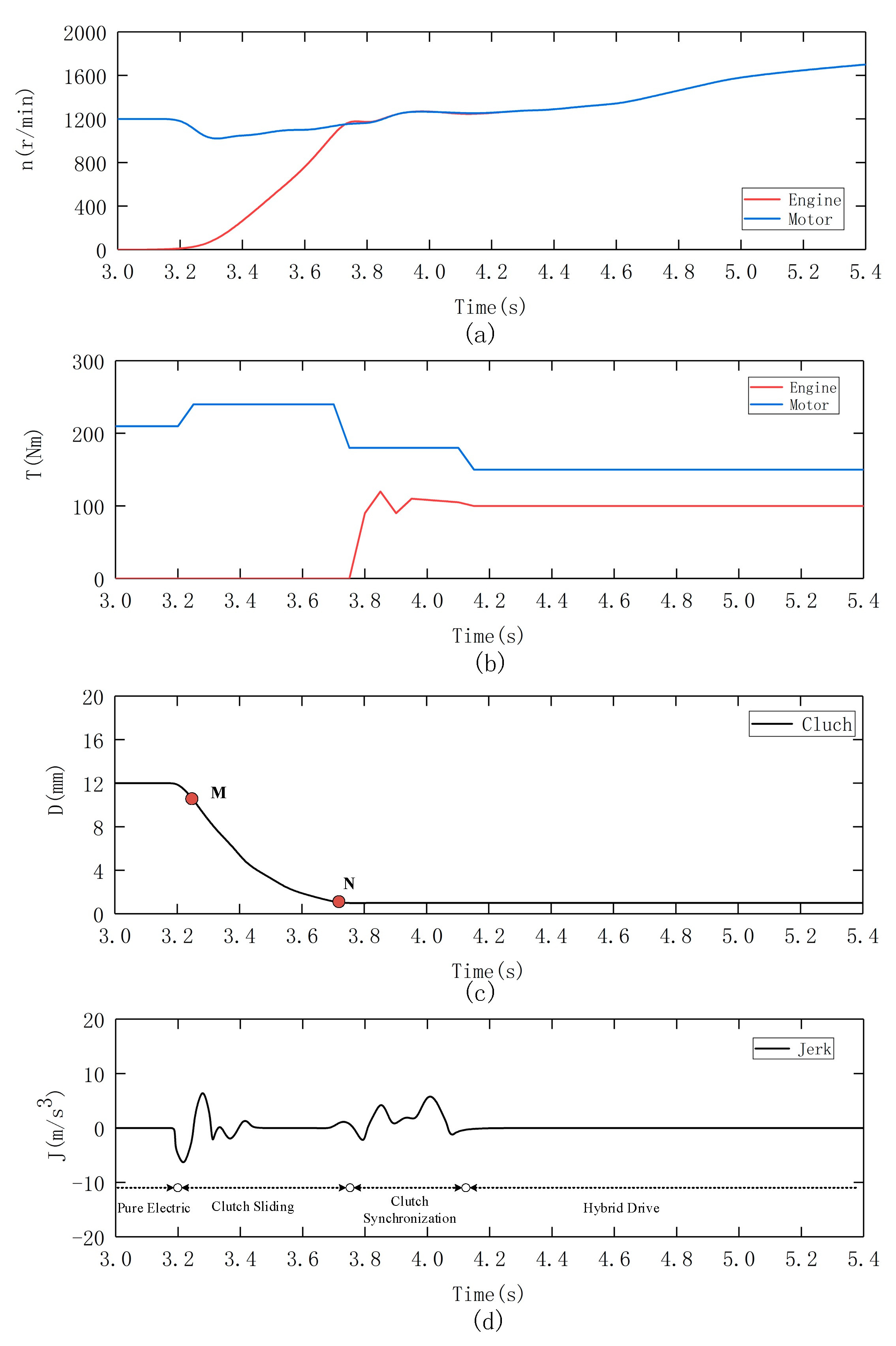
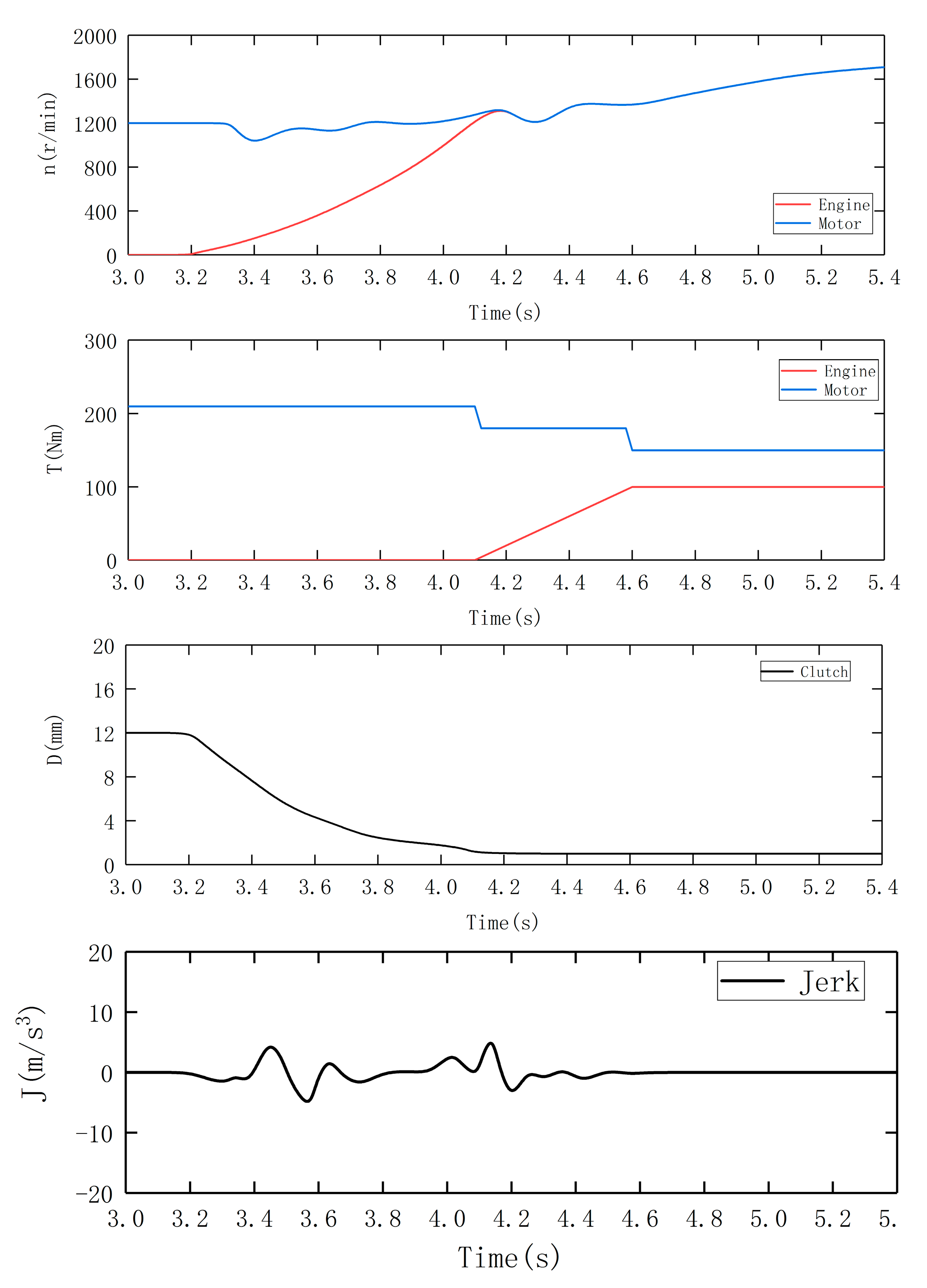
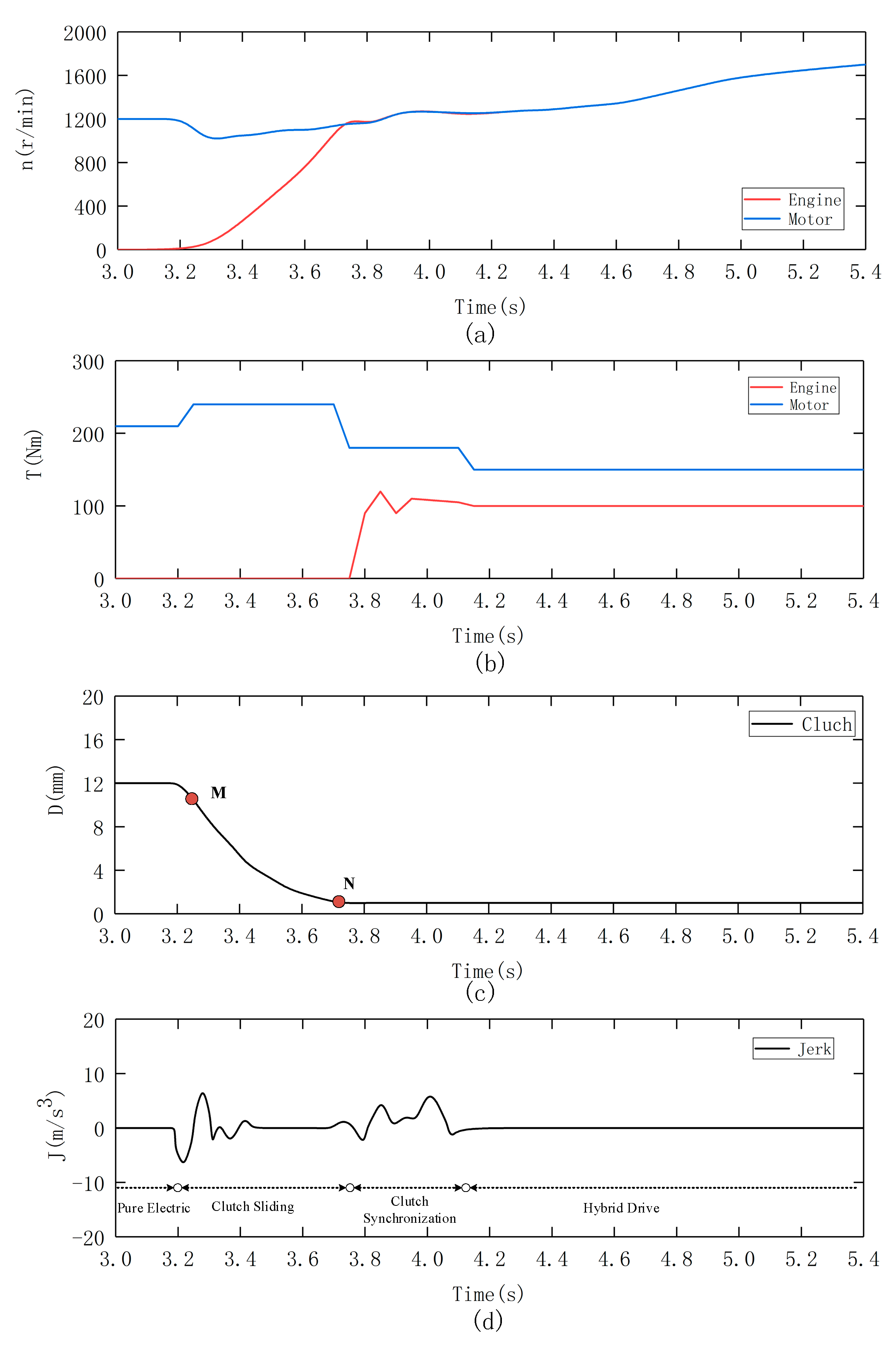
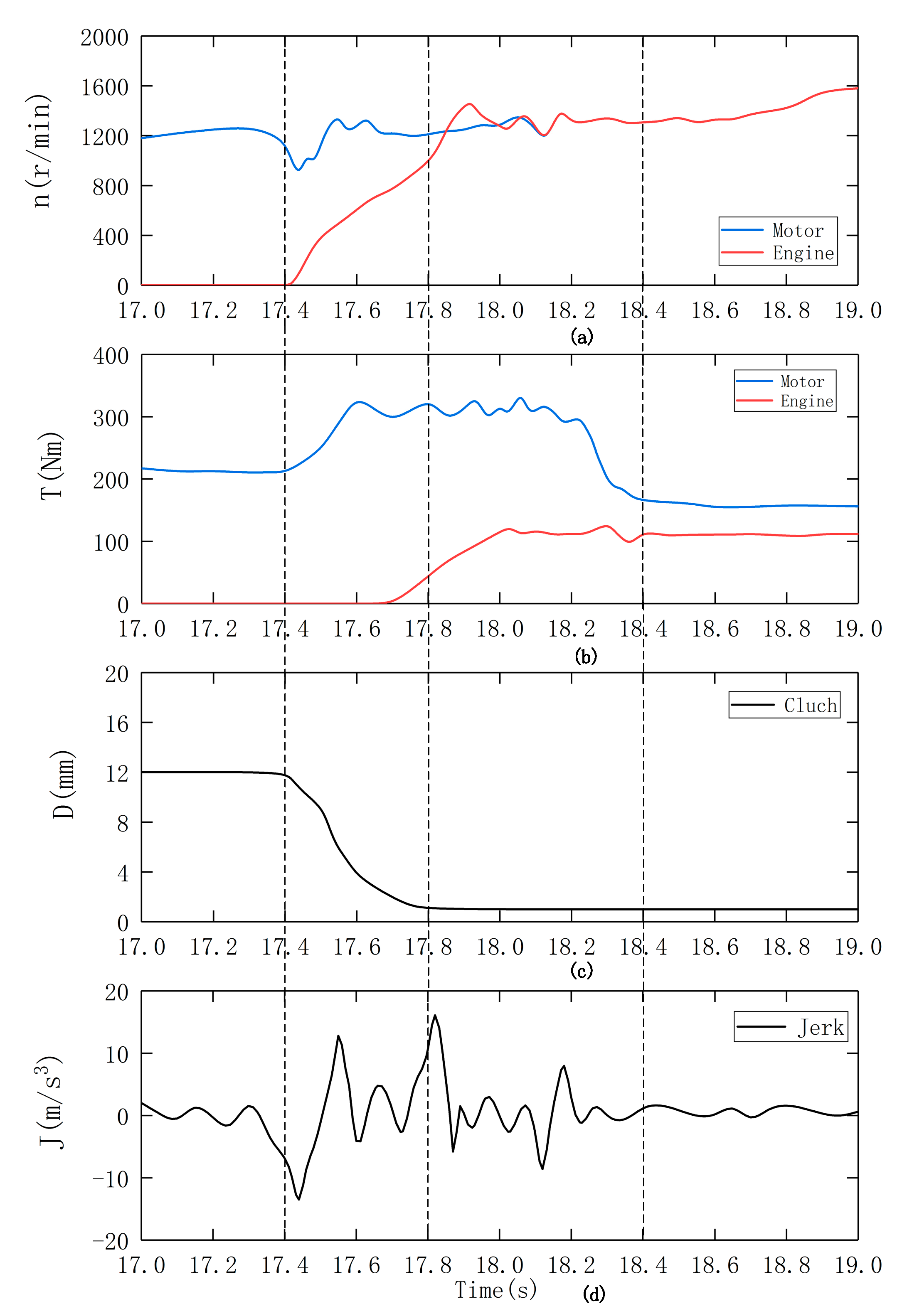
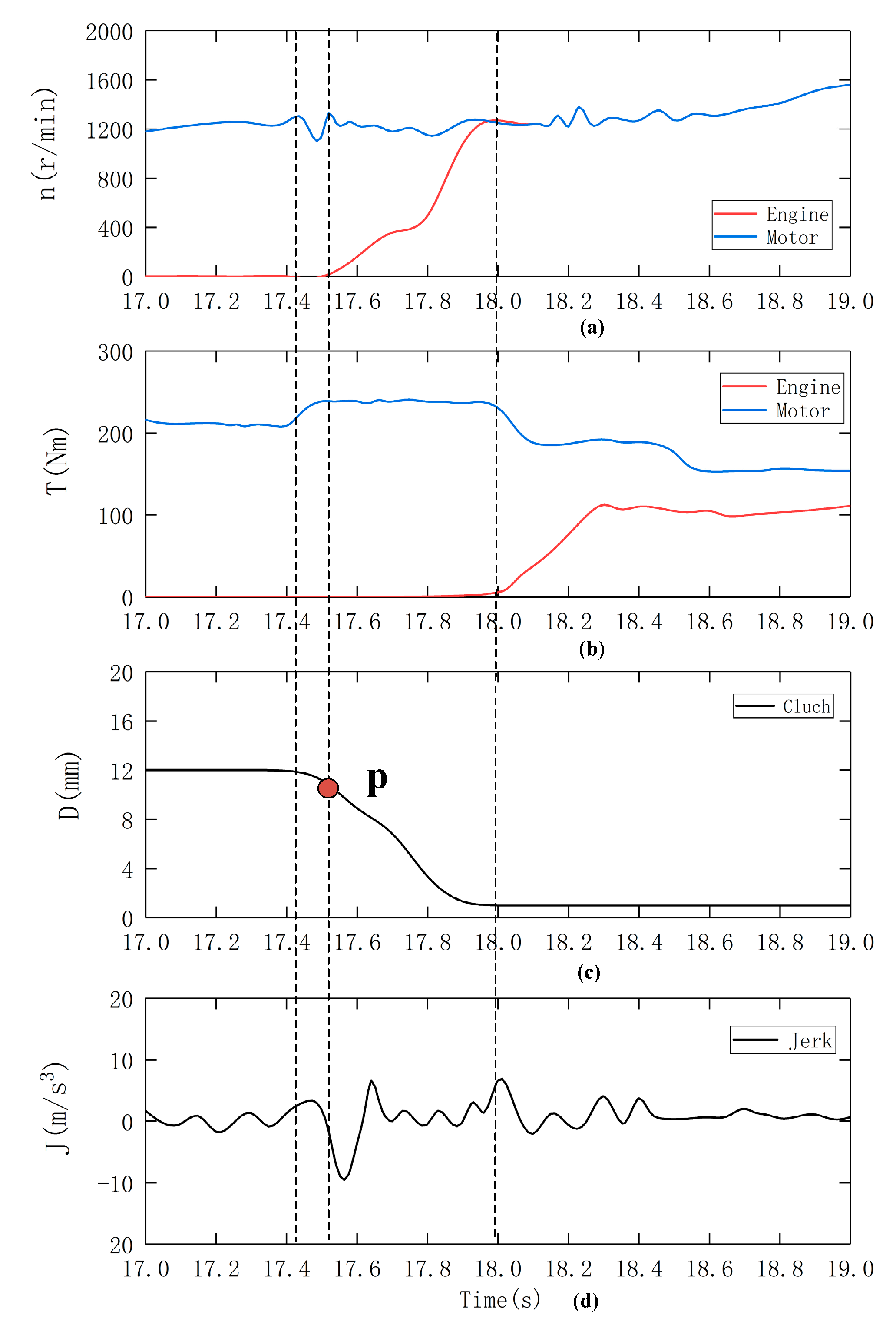
- Clutch engagement stageThe clutch engagement stage includes a slipping phase and a synchronous phase. The starting point of the sliding phase is the half-joint point of the clutch, that is, the point where the friction torque is equal to the engine resistance torque. The point M in Figure 7c is the half-joint point. After that, the engine starts to rotate and gradually accelerates, and the engine speed rises with the increase of clutch torque until it reaches the target speed. As shown in Figure 7a, the engine speed reaches 1180 r/min at 3.76 s. At this time, the clutch enters into the synchronous phase, the engine speed and the motor speed are nearly the same, the clutch is locked, and then the motor changes the command torque to reduce the synchronous phase shock, the clutch synchronization is completed. The point N in Figure 7c is the clutch synchronization point.
- (2)
- Engine start stageWhen the engine speed reaches 1200 r/min, the engine executes the start command. As shown in Figure 7b, the start time is from 3.75 s to 3.95 s. During the engine startup, the engine ripple torques are uncertain and can be regarded as torque disturbances. These disturbances caused unexpected vehicle jerks. Although the engine produces an impact during start-up, its impact strength is smaller than the clutch engagement process.
- (3)
- Engine dynamic coupling stageWhen the engine is started, the engine and the motor output the corresponding torque to jointly drive the vehicle according to the upper energy management strategy. Due to the difference of the dynamic characteristics between the engine and the motor, the engine can not respond to the torque in time, so the speed of the engine will fluctuate, thus causing impact. Thanks to the use of torque coordinated control proposed in this paper, the motor torque would compensate for insufficient engine torque, so the impact is small. As shown in Figure 7d, the jerk is 5.12 m/s3.
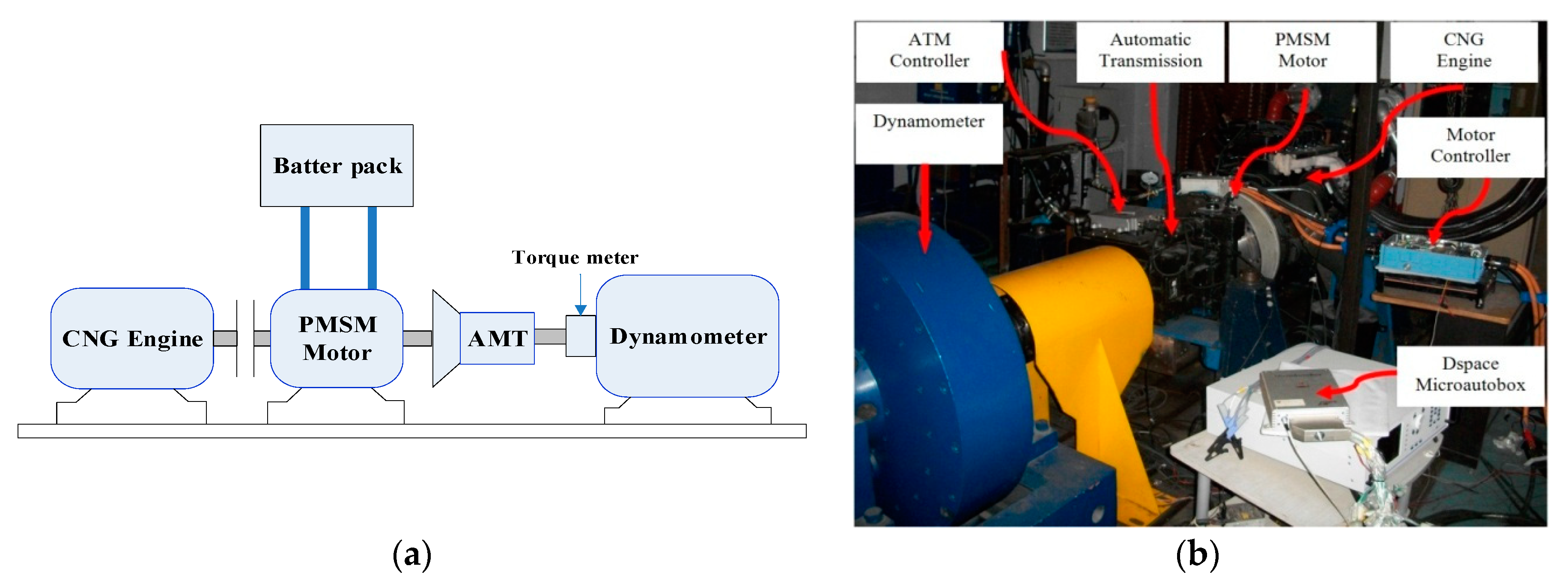
5. Experimental Verification
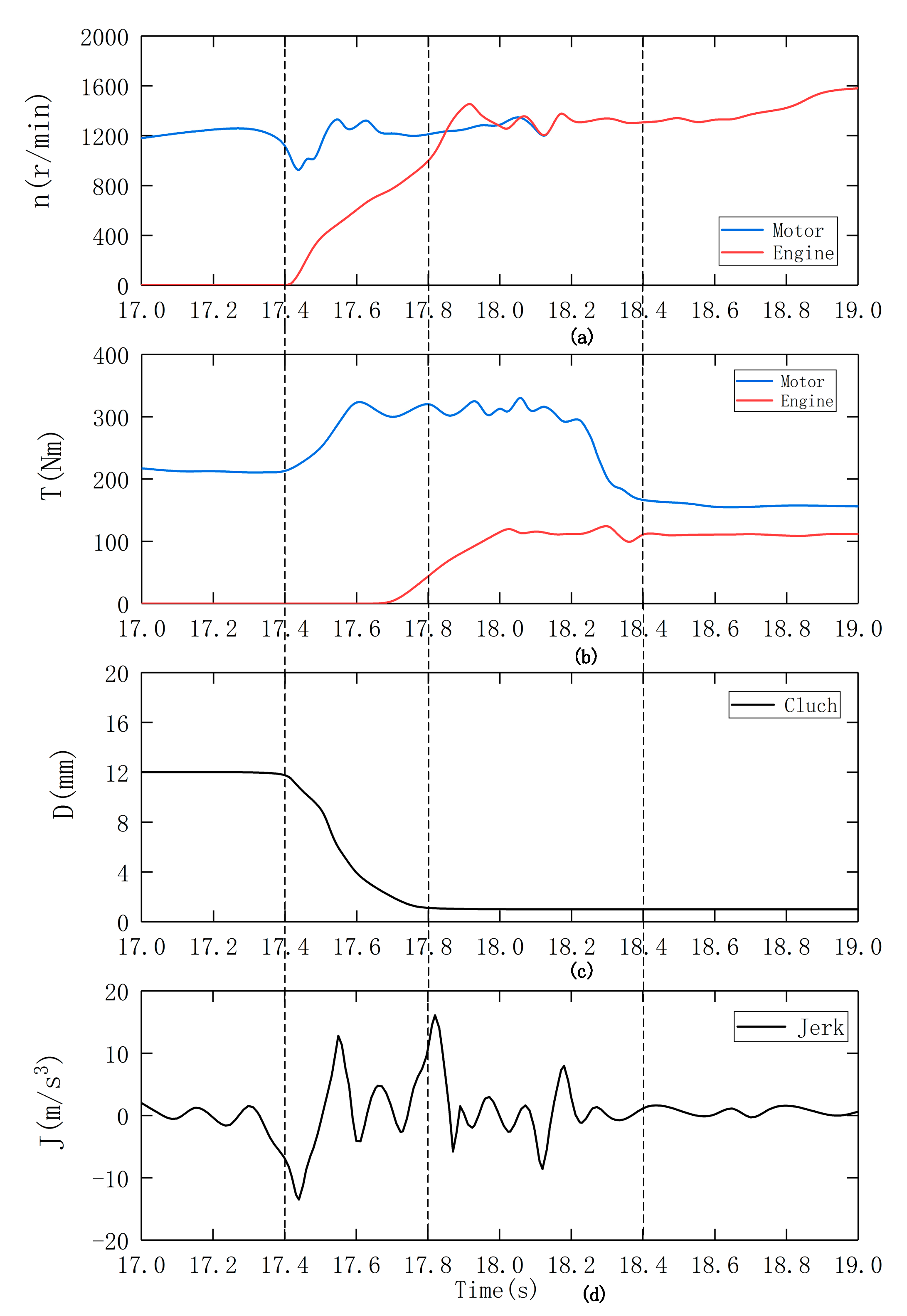
5.1. Motor Torque Compensation Strategy
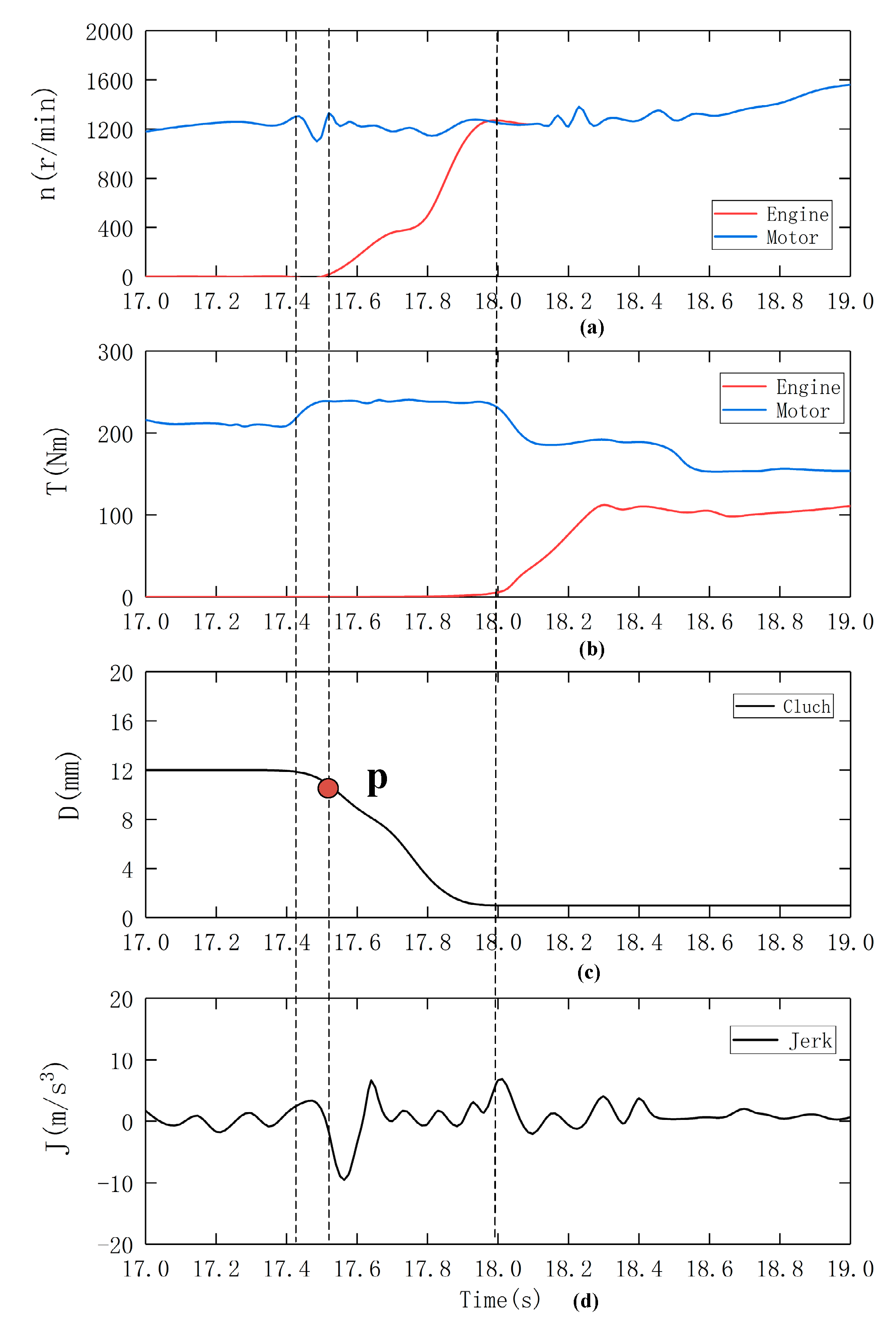
5.2. Dynamic Coordinated Control Strategy
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.01 | 0.7 | ||
| 1.2 kg/m3 | 0.3 | ||
| 0.65 | 0.6 | ||
| 6.73 m2 | 0.4 | ||
| 6200 Nm/rad | 1200 r/min | ||
| 50 Nm/rad | 180 r/min | ||
| 0.25 | 20 r/min | ||
| 0.081m |
References
- Martinez, C.M.; Hu, X.; Cao, D.; Velenis, E.; Gao, B.; Wellers, M. Energy Management in Plug-in Hybrid Electric Vehicles: Recent Progress and a Connected Vehicles Perspective. IEEE Trans. Veh. Technol. 2017, 66, 4534–4549. [Google Scholar] [CrossRef]
- Peng, J.; He, H.; Xiong, R. Rule based energy management strategy for a series–parallel plug-in hybrid electric bus optimized by dynamic programming. Appl. Energy 2017, 185, 1633–1643. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Y.; Tian, J.; Zhang, S. Research on a Plug-In Hybrid Electric Bus Energy Management Strategy Considering Drivability. Energies 2018, 11, 2177. [Google Scholar] [CrossRef]
- Zhu, F.; Chen, L.; Yin, C.; Shu, J. Dynamic modelling and systematic control during the mode transition for a multi-mode hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 1007–1023. [Google Scholar] [CrossRef]
- Zeng, X.; Yang, N.; Wang, J.; Song, D.; Zhang, N.; Shang, M.; Liu, J. Predictive-model-based dynamic coordination control strategy for power-split hybrid electric bus. Mech. Syst. Signal Process. 2015, 60, 785–798. [Google Scholar] [CrossRef]
- Tang, X.; Yang, W.; Hu, X.; Zhang, D. A novel simplified model for torsional vibration analysis of a series-parallel hybrid electric vehicle. Mech. Syst. Signal Process. 2017, 85, 329–338. [Google Scholar] [CrossRef]
- Davis, R.I.; Lorenz, R.D. Engine torque ripple cancellation with an integrated starter alternator in a hybrid electric vehicle: Implementation and control. IEEE Trans. Ind. Appl. 2003, 39, 1765–1774. [Google Scholar] [CrossRef]
- Kim, H.; Kim, J.; Lee, H. Mode transition control using disturbance compensation for a parallel hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2011, 225, 150–166. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Y.; Shu, J.; Yin, C. Coordinated control of a series-parallel hybrid electric bus during EV/HEV mode transition. WSEAS Trans. Circuits Syst. 2012, 11, 198–209. [Google Scholar]
- Su, Y.; Su, L.; Hu, M.; Qin, D.; Zhang, T.; Fu, C. Dynamic coordinated control during mode transition process for a compound power-split hybrid electric vehicle. Mech. Syst. Signal Process. 2018, 107, 221–240. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, Z.; Zhang, T.; Li, M. Mode transition coordinated control for a compound power-split hybrid car. Mech. Syst. Signal Process. 2017, 87, 192–205. [Google Scholar] [CrossRef]
- Oh, J.; Choi, S.B.; Chang, Y.J.; Eo, J.S. Engine clutch torque estimation for parallel-type hybrid electric vehicles. Int. J. Automot. Technol. 2017, 18, 125–135. [Google Scholar] [CrossRef]
- Tarasow, A.; Wachsmuth, G.; Lemieux, J.; Serway, R.; Bohn, C. Online estimation of time-varying torque characteristics of automotive clutches using a control oriented model. In Proceedings of the 2013 American Control Conference, Washington, DC, USA 17–19 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 6752–6757. [Google Scholar]
- Zhao, Z.; He, L.; Yang, Y.; Wu, C.; Li, X.; Karl Hedrick, J. Estimation of torque transmitted by clutch during shifting process for dry dual clutch transmission. Mech. Syst. Signal Process. 2016, 75, 413–433. [Google Scholar] [CrossRef]
- Hwang, H.-Y. Minimizing Seat Track Vibration That is Caused by the Automatic Start/Stop of an Engine in a Power-Split Hybrid Electric Vehicle. J. Vib. Acoust. 2013, 135, 061007. [Google Scholar] [CrossRef]
- Chen, J.-S.; Hwang, H.-Y. Engine automatic start-stop dynamic analysis and vibration reduction for a two-mode hybrid vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 1303–1312. [Google Scholar] [CrossRef]
- He, R.; Tian, X.; Ni, Y.; Xu, Y. Mode transition coordination control for parallel hybrid electric vehicle based on switched system. Adv. Mech. Eng. 2017, 9, 1–12. [Google Scholar] [CrossRef]
- Van Berkel, K.; Hofman, T.; Serrarens, A.; Steinbuch, M. Fast and smooth clutch engagement control for dual-clutch transmissions. Control Eng. Pract. 2014, 22, 57–68. [Google Scholar] [CrossRef]
- Han, K.; Yoon, Y. Clutch Transmissible Torque Estimation for Dry Dual Clutch Transmission Control; Springer: Berlin/Heidelberg, Germany, 2013; pp. 449–456. [Google Scholar]
- Kim, G.-W. Systematic gear shift model for an automatic-transmission-based parallel hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 895–904. [Google Scholar] [CrossRef]
- Yu, C.-H.; Tseng, C.-Y.; Wang, C.-P. Smooth gear-change control for EV Clutchless Automatic Manual Transmission. In Proceedings of the 2012 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Kaohsiung, Taiwan, 11–14 July 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 971–976. [Google Scholar]
- Glielmo, L.; Vasca, F. Engagement control for automotive dry clutch. In Proceedings of the American Control Conference, Chicago, IL, USA, 28–30 June 2000; IEEE: New York, NY, USA, 2000; pp. 1016–1017. [Google Scholar]
- Dutta, A.; Zhong, Y.; Depraetere, B.; Van Vaerenbergh, K.; Ionescu, C.; Wyns, B.; Pinte, G.; Nowe, A.; Swevers, J.; De Keyser, R. Model-based and model-free learning strategies for wet clutch control. Mechatronics 2014, 24, 1008–1020. [Google Scholar] [CrossRef] [Green Version]
- Minh, V.T.; Rashid, A.A. Automatic control of clutches and simulations for parallel hybrid vehicles. Int. J. Automot. Technol. 2012, 13, 645–651. [Google Scholar] [CrossRef]
- Van Vaerenbergh, K.; Rodriguez, A.; Gagliolo, M.; Vrancx, P.; Nowe, A.; Stoev, J.; Goossens, S.; Pinte, G.; Symens, W. Improving wet clutch engagement with reinforcement learning. In Proceedings of the 2012 International Joint Conference on Neural Networks (IJCNN), Brisbane, Australia, 10–15 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–8. [Google Scholar]
- Chen, L.; Xi, G.; Sun, J. Torque Coordination Control During Mode Transition for a Series-Parallel Hybrid Electric Vehicle. IEEE Trans. Veh. Technol. 2012, 61, 2936–2949. [Google Scholar] [CrossRef]
- Wang, S.; Xia, B.; He, C.; Zhang, S.; Shi, D. Mode transition control for single-shaft parallel hybrid electric vehicle using model predictive control approach. Adv. Mech. Eng. 2018, 10, 1–10. [Google Scholar] [CrossRef]
- Sun, J.; Xing, G.; Zhang, C. Data-Driven Predictive Torque Coordination Control during Mode Transition Process of Hybrid Electric Vehicles. Energies 2017, 10, 441. [Google Scholar] [CrossRef]
- Koprubasi, K.; Westervelt, E.R.; Rizzoni, G. Toward the systematic design of controllers for smooth hybrid electric vehicle mode changes. In Proceedings of the American Control Conference, New York, NY, USA, 11–13 July 2007; IEEE: New York, NY, USA, 2007; pp. 2725–2730. [Google Scholar]
- Koprubasi, K. Modeling and Control of a Hybrid Electric Vehicle for Drivability and Fuel Economy Improvements. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2008. [Google Scholar]
- Zhao, Z.; He, N.; Zhu, Y.; Yu, Z. Mode transition control for four wheel drive hybrid electric car. J. Mech. Eng. 2011, 47, 100–109. [Google Scholar] [CrossRef]
- Zaccarian, L.; Teel, A.R. A common framework for anti-windup, bumpless transfer and reliable designs. Automatica 2002, 38, 1735–1744. [Google Scholar] [CrossRef]
- Malloci, I.; Hetel, L.; Daafouz, J.; Iung, C.; Szczepanski, P. Bumpless transfer for switched linear systems. Automatica 2012, 48, 1440–1446. [Google Scholar] [CrossRef]
- Ni, C.; Zhang, Y.; Zhao, Q.; Adel, B. Dynamic Torque Control Strategy of Engine Clutch in Hybrid Electric Vehicle. J. Mech. Eng. 2013, 49, 114–121. [Google Scholar] [CrossRef]


| Items | Detail Information |
|---|---|
| Total vehicle mass | 18,000 kg |
| Engine | CNG, 5.9 L, nominal power: 172 kW, Max torque: 678 Nm |
| EM | Permanent magnet, max torque: 750 Nm, Nominal/peak power: 70 kW/115 kW, |
| Battery | Capacity: 120 Ah, voltage: 336 V |
| AMT | 5-speed, gear ratio: [6.11, 3.66, 2.17, 1.42, 1] |
| Final drive | 6.14 |
| Mode | State of Engine | State of Motor | State of Clutch |
|---|---|---|---|
| Pure electric | Inoperation | Drive | Separation |
| Engine driving alone | Operation | Inoperation | Combination |
| Engine drive and power generation | Operation | Electricity generation | Combination |
| Hybrid drive | Operation | Drive | Combination |
| Brake energy recovery | Inoperation | Electricity generation | Separation |
| Indices | Mode Transition Duration(s) | The Maximum Jerk(m/s3) |
|---|---|---|
| Traditional torque compensation | 0.75 | 14.7 |
| MPC | 1.42 | −6.39 |
| The proposed control strategy | 0.96 | −6.96 |
| Indices | Mode Transition Duration(s) | The Maximum Jerk(m/s3) |
|---|---|---|
| Torque compensation control strategy | 1 | 16.8 |
| Dynamic coordinated control strategy | 1.2 | −8.9 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Zhang, Y.; Zhang, S.; Tian, J.; Hu, S. Control Strategy of Mode Transition with Engine Start in a Plug-in Hybrid Electric Bus. Energies 2019, 12, 2989. https://doi.org/10.3390/en12152989
Yang Y, Zhang Y, Zhang S, Tian J, Hu S. Control Strategy of Mode Transition with Engine Start in a Plug-in Hybrid Electric Bus. Energies. 2019; 12(15):2989. https://doi.org/10.3390/en12152989
Chicago/Turabian StyleYang, Ye, Youtong Zhang, Si Zhang, Jingyi Tian, and Shaoyi Hu. 2019. "Control Strategy of Mode Transition with Engine Start in a Plug-in Hybrid Electric Bus" Energies 12, no. 15: 2989. https://doi.org/10.3390/en12152989
APA StyleYang, Y., Zhang, Y., Zhang, S., Tian, J., & Hu, S. (2019). Control Strategy of Mode Transition with Engine Start in a Plug-in Hybrid Electric Bus. Energies, 12(15), 2989. https://doi.org/10.3390/en12152989