1. Introduction
As a new type of voltage source converter, the modular multilevel converter (MMC) has attracted wide attention and research in both academia and industry since it was proposed by German scholar R. Marquardt in 2001 [
1]. Due to the MMC’s advantages, such as its modular structure, high quality voltage and current waveforms, fault tolerance, and redundancy control, an MMC with a back-to-back configuration (BTB-MMC) is widely used in voltage sourced converter high voltage direct current (VSC-HVDC) transmission systems.
Similar to BTB-MMC, which can connect two AC systems with different frequencies, modular multilevel direct AC/AC converters have been proposed in recent years. For example, the Modular Multilevel Matrix Converter (MMMC or M
3C) [
2,
3], which consists of nine branches, each comprising several series-connected H-bridge submodules and an inductor, is suitable for a 3Φ-to-3Φ AC/AC bidirectional power conversion. In addition, large capacity AC/AC converters are needed in many applications, such as the asynchronous interconnection of different power systems and medium or high voltage motor drives. For these applications, an indirect AC/DC/AC converter with a back-to-back structure is usually employed, and a large DC link capacitor is needed in the intermediate stage. At present, the most widely used direct AC/AC converters are mainly thyristor based cycloconverters and matrix converters [
4]. These two converters are attractive because they lack a DC link or DC filter. However, the shortcomings of these two converters are also obvious. For cycloconverters, in order to ensure the quality of their output voltage waveform, their frequency conversion is limited, that is, the ratio of the output to input frequency should be less than one third to reduce harmonics. In addition, the power factor of a cycloconverter is low, and its harmonics are large, which requires a large amount of reactive power compensation, as well asfiltering devices. For a matrix converter, although its output frequency and power factor are arbitrarily adjustable, the chopper mode limits its voltage utilization, and additional step-up transformers are often needed in practical applications. Thus, there are two problems. Firstly, the utilization of voltage is low, and transformers are needed to boost the output voltage. Secondly, it is difficult to realize high voltage and a large capacity because the bidirectional switch of the matrix converter is only composed of semiconductor switch devices. Therefore, from the viewpoint of overcoming the above shortcomings of both converters, the M
3C is a promising structure for high capacity direct AC/AC converters.
Up to now, the application of M
3Cs has mainly focused on medium voltage and high-power AC variable frequency speed regulation and power electronic transformers [
5,
6,
7,
8,
9,
10,
11,
12,
13,
14]. Since 2013, some scholars have proposed the application of M
3C to the field of low frequency AC transmission (LFAC) and have undertaken preliminary studies on its control strategy [
15,
16,
17,
18]. The control of an M
3C is very complex and has two main technical problems. Firstly, the converter has more degrees of freedom (nine voltage and eight current degrees of freedom, to be exactly), so it is difficult to achieve independent control for each degree of freedom. Secondly, due to the different frequencies of both sides systems, the converter’s branch currents consist of different frequency components. Thus, the strong coupling between these components yields great challenges to control methods. Additionally, like the other modular multilevel converter, M
3C’s numerous floating capacitors will inevitably suffer from the unbalanced capacitor voltage caused by the differences in the triggering process and capacitance parameter of each submodule. Therefore, appropriate capacitor voltage balancing control methods are needed to ensure the stable operation of the converter. The most widely used decoupling control methods for M
3C are based on double αβ0 coordinate transformation [
9,
10,
11,
19,
20,
21]. By applying double αβ0 transformation to M
3C, not only can the mathematical model of M
3C be simplified, but the decoupling control between different degrees of freedom can also be realized.
Furthermore, whether in motor driving or low frequency AC transmission applications, the power systems often exist in asymmetric operation conditions due to sudden faults, such as single-phase short-circuit faults in the AC system. When the three-phase systems are asymmetric, the negative sequence components of the electrical quantities will appear and will increase the RMS value of the currents, which will lead to overcurrent in the system. At the same time, a large number of non-characteristic harmonics will be generated on both sides of the M3C system. These harmonics may have an effect on the controller, deteriorate the control results, and also lead to overcurrent of the devices in the converter, or even burn down the components, which will seriously endanger the safe and stable operation of the whole system. Therefore, it is necessary to study the control strategy of an AC/AC system based on M3C under asymmetric fault conditions.
In this paper, an asymmetric fault control strategy for an AC/AC system based on a modular multilevel matrix converter is proposed. Firstly, the structure and operating principles of the M3C are introduced and simulated. Then, based on the mathematical model of the αβ reference frames, control strategies for primary side system and secondary side system are proposed. In light of the asymmetric fault conditions that occur in the secondary side system, the positive and negative sequence components of voltages and currents are separated, and then the proportional resonant controller (PR) is used to regulate the positive and negative sequence components at the same time to realize decoupled control in its αβ reference frames. Finally, a case is given to confirm the effectiveness of the proposed control strategy under the condition that a short-circuit fault between the BC-phase occurs in the secondary side system. The simulation results validate that the proposed control strategy can ensure stable operation of the systems under asymmetric fault conditions.
3. AC Asymmetric Fault Control Strategy
In this section, the control strategy of an AC/AC system based on M
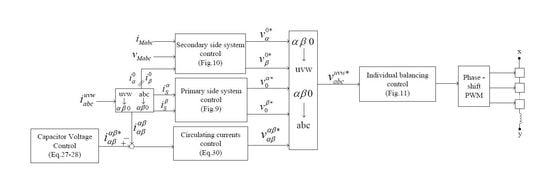
3C under asymmetric fault conditions is proposed according to the mathematical model presented in (3)–(7). This strategy allows fully decoupled control of the primary side currents, circulating currents, and secondary side currents. An overview of the proposed control strategy is presented in
Figure 7. Firstly, a double αβ0 transformation is applied to the branch currents and voltages. Then, the positive and negative sequences for electrical quantities are separated (as depicted in
Figure 8). After that, the control strategies for the primary side system and secondary side system are designed (as shown in
Figure 9 and
Figure 10). In addition, in order to maintain the stability of capacitor voltages, the capacitor voltage control and the circulating current control are included. Finally, the reference modulation signal is obtained by inverse double αβ0 transformation, and the modulation signal of each submodule is formed by combining the individual balancing control of the submodules within one branch. The trigger pulse is generated by comparing it with the triangular carrier. The following is a detailed analysis of each part of the control strategy.
3.1. Extraction of Positive and Negative Sequence Components
For an asymmetric AC system, negative sequence components exist in both AC voltages and currents. Therefore, it is necessary to separate these components and then extract the positive and negative sequence components, which will be used to design the secondary side controller. In this paper, an asymmetric fault of secondary side system is assumed. The voltages or currents of the system can be expressed as follows:
where
fabc denotes voltage or current;
and ω
1 = ω
M where ω
M is the fundamental frequency of the system;
, ω
2 = −ω
M, α
+ and α
− represent the initial phase angles of the positive and negative sequence components respectively, and
f+ and
f− are the amplitude of the positive and negative sequence components, while
f0 is the zero-sequence component. In this paper, the secondary side system is not grounded, so the zero component is not considered. Equation (8) can be rewritten as follows:
The Park transformation matrices of the positive and negative sequence from the three-phase
abc coordinate frames to the two-phase
dq rotating coordinate frames are as follows:
Applying Equations (10) to (9) results in the following sequence separation:
It can be seen from (11) that after the
transformation, the positive sequence components become the direct current components, while the negative sequence components become the double frequency components. After the
transformation, the negative sequence components become the direct current components, while the positive sequence components become the double frequency components. When these quantities in Equation (11) are delayed by π/2, (12) can be obtained as follows:
Combined with (11) and (12), Equation (13) and the flowchart of
Figure 8 can be obtained:
3.2. Control Strategy of the Primary Side System
Figure 1 and Kirchhoff’s current law give
,
,
,
as follows:
The equations related to the primary side system can be obtained from Equation (4):
After applying the
dq transformation to Equation (15), the following results can be given as follows:
The cross-decoupling control of the primary side system can then be obtained:
where
KS and
TS represent the proportion and time constants, respectively, and
means the reference value of the system current on the
dq reference frames. Additionally, in order to achieve a unity power factor operation, the reactive current is set to 0, and the active current is controlled by the outer power loop control and the overall capacitor voltage control:
where
KA and
TA represent the proportion and time constant, respectively, and
,
, and
represent the active power setting value, the rated capacitor voltage, and the average voltage of all submodule capacitors, respectively.
In summary, the control block diagram of the primary side system can be obtained as shown in
Figure 9.
3.3. Control Strategy of the Secondary Side System
Combining Equations (5) and (14), the corresponding equations for the secondary side system are as follows:
Similarly, when the
dq transformation is applied, we get
Because the voltages and currents should be separated into positive and negative sequences under asymmetric fault conditions, the decoupled controllers for the positive and negative sequences can be designed separately according to the following equations:
where
KM1,
KM2 and
TM1,
TM2 represent the proportion and time constants, respectively, and
d+,
d−,
q+, and
q− denote the positive and negative sequence of electrical quantities (voltages or currents) on the
dq reference frames.
In the above section, the controllers based on positive and negative sequences are introduced for an asymmetric ac system. The advantage of this method is that it is easy to understand because the positive and negative sequence controllers are similar to those of the symmetric AC system. Thus, the design methods can be analogized. The disadvantage is that the control system and its implementation are complex and can also produce errors and delays that cannot be ignored in the control loop, while the proportional resonant controller (PR) can be used to regulate positive and negative sequence currents at the same time. Moreover, compared to design methods based on positive and negative sequence controllers separately, only two PR controllers are needed instead of four for the
dq-based controllers. In a word, the proportional resonant controller is preferable to regulate the fault currents of a secondary side system, which consists of both positive and negative sequences simultaneously. Therefore, considering Equation (5), the voltage references to achieve the decoupled current control of the secondary side system using PR controllers should be given as follows:
where
represents the transfer function of the proportional resonant controller, and
Kp and
Ki denote the proportion and resonant coefficients, respectively.
In summary, the control block diagram of the secondary side system is as follows:
3.4. Power Control
According to the theory of instantaneous reactive power [
22], the instantaneous active power and reactive power of the secondary side system can be expressed as:
where
P1 and
Q1 are the DC components of active power and reactive power, respectively, and
Ps2 and
Pc2 represent the double frequency oscillations in active power, while
Qs2 and
Qc2 are those of the reactive power. As taken from [
23,
24], the relation between the currents, the power, and the voltages in the αβ reference frames are
It is important to note that there are four degrees of freedom (
,
,
,
) to control six variables (
P1,
Q1,
Ps2,
Pc2,
Qs2,
Qc2). Thus, it is necessary to choose variables according to the control objectives. In this paper,
P1,
Q1,
Ps2, and
Pc2 are selected as control variables. Therefore, it can be concluded that
3.5. Capacitor Voltage Control
Capacitor voltage control consists of the capacitor voltage control for DC components and the capacitor voltage control for AC components. The capacitor voltage control for DC component is called a “DC capacitor voltage balancing control” [
25,
26], which regulates the DC components of all the capacitor voltages to be balanced. The capacitor voltage control for AC components is referred to as a “fluctuation mitigating control” [
27,
28], which mitigates the amplitude of AC voltage fluctuation. These controls are all realized by adjusting the four circulating currents appropriately.
On the whole, capacitor voltage control mainly consists of the following three subcontrols:
1) Overall voltage control: This control adjusts the algebraic average value of all capacitor voltages to the rated value. A subcontrol has been implemented in the primary side system control strategy, as shown in
Figure 9.
2) Branch balancing control: This control balances the voltage of the algebraic average values of the DC capacitor voltage among the nine branches, including the branches of the voltage balancing control between the three subconverters, which is referred to as the “inter-subconverter balancing control” and the three branch voltage balancing within one subconverter, which is referred to as an “inner-subconverter balancing control” [
19,
20,
21]. These controls are mainly realized by adjusting four circulating currents
. The methods presented in [
21] will be adopted in this paper and will not be discussed in detail here.
a) Inter-subconverter balancing control: The commands for the four circulating currents are as follows:
b) Inner-subconverter balancing control: The commands for the four circulating currents are as follows:
where
θs and
θM are the voltage phase of both side systems, and
K0i and
K1 are the proportional control coefficients. Here,
,
,
represent the algebraic average value of the branch voltages after the double αβ0 transformation.
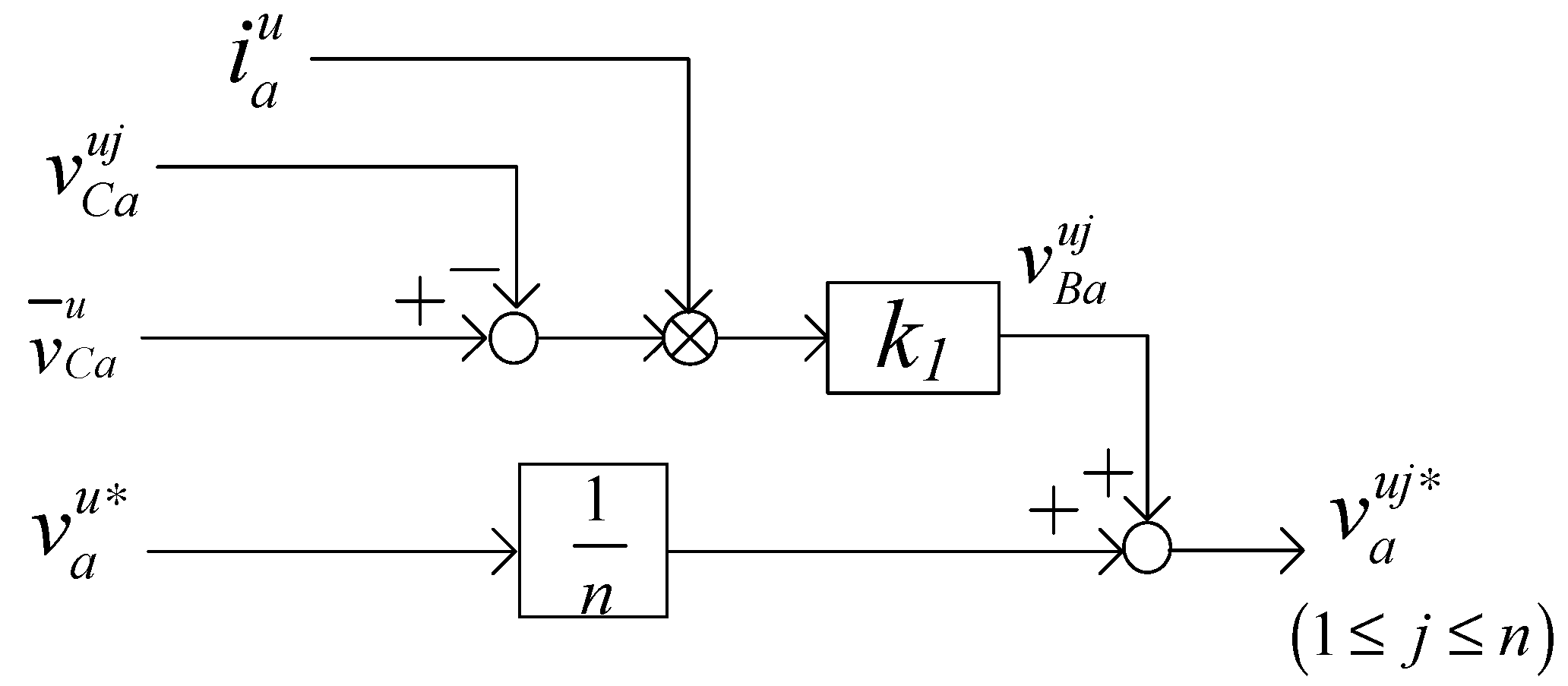
3) Individual balancing control: This control is used to achieve voltage balancing among
n submodules within a single branch. When voltage imbalance occurs within a branch, individual balancing control plays a role in eliminating the voltage imbalance. As shown in
Figure 11, taking branch-au of subconverter a as an example. In the figure,
,
, and
denote the algebraic average value of the capacitor voltages and the modulated signal in branch-au and the capacitor voltage of the
j-th submodule in branch-au, respectively.
k1 represents the proportional coefficient. Like other modular multilevel cascade converters, by adding a voltage increment that depends on the direction of the branch current to the modulation signal, a positive or negative power that charges or discharges the capacitor will be formed balance capacitor voltage within the branch.
(1 < j < n) represents the voltage references of
n submodules. These references will be used to generate trigger pulses by comparing them with triangular carriers.
3.6. Circulating Current Control
Basically, these circulating currents should be regulated to zero to reduce power loss because they make no contribution to transferring active power between both systems. However, as mentioned earlier, voltage balancing between the nine branches and a mitigation of the AC voltage fluctuation can be achieved by properly adjusting the four circulating currents.
From Equation (6), the equation for the four circulating currents is as follows:
Thus, the voltage commands to achieve decoupled control for circulating currents can be given as follows:
where
k2 represents the proportional constant and
means the reference values of the four circulating currents, which are given by the capacitor voltage control in
Section 3.5.
4. Assessment in Simulated Experiments
To verify the effectiveness of the proposed control strategy under asymmetric fault conditions, a simulation system, as shown in
Figure 1, was built in the PSCAD/EMTDC software. Both system parameters are described in
Table A2. The system line-to-line voltages on both sides are 10 kV, the number of submodules within each branch is
n = 20 (taking redundancy into account), the rated capacitor voltage
ucN is 1.5 kV, the system frequencies on both sides are 50 Hz, and the carrier phase-shifted PWM is adopted when the switching frequency
fs is 2 kHz. The changes in the active power command of both systems are shown in
Table 1, while the reactive power command of
Q1 =
Q2 = 0 ensures operation of the unity power factor. In the simulation case, at
t = 1 s, a BC-phase short-circuit fault occurs, and the fault lasts for 0.5 s.
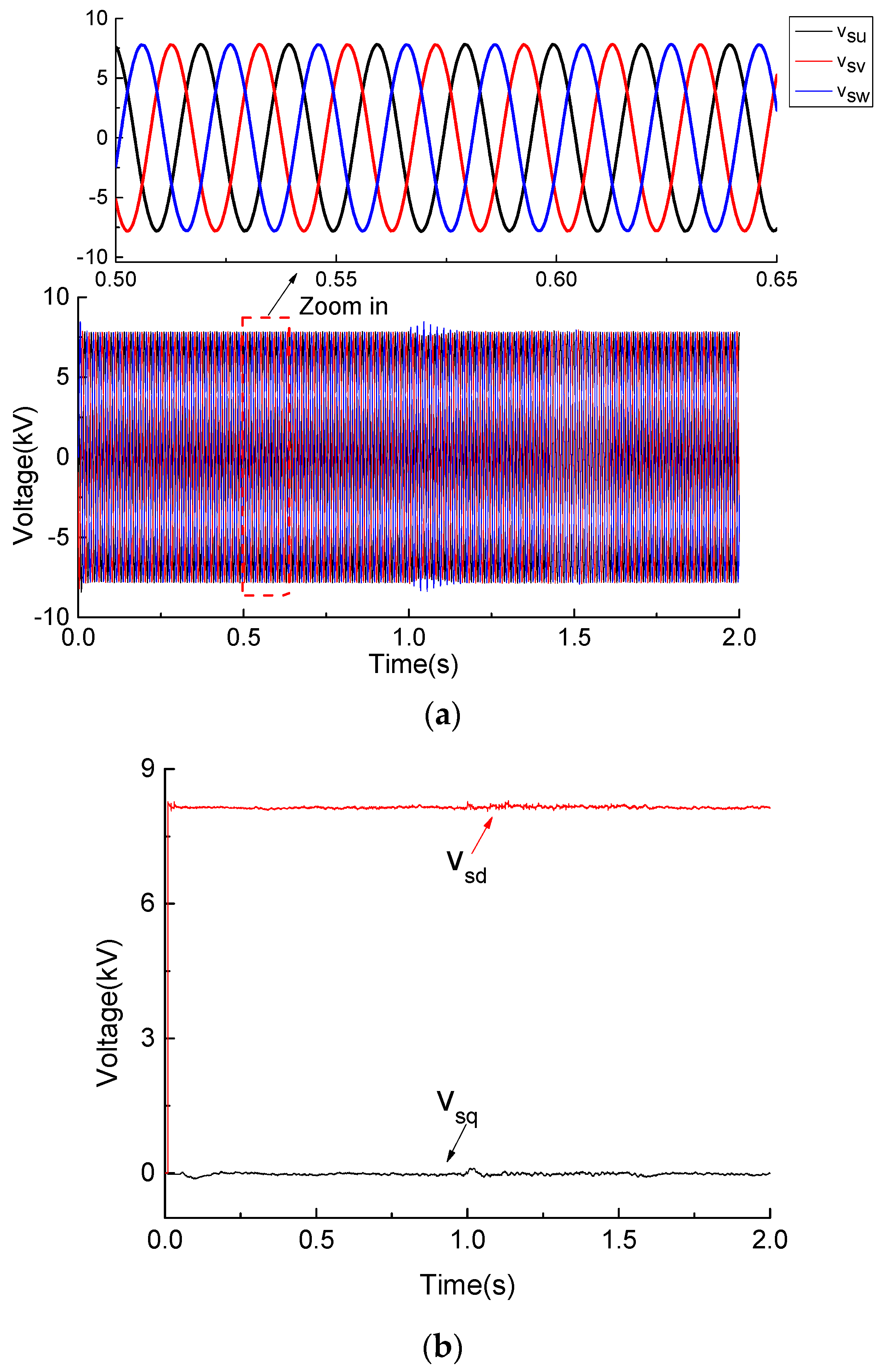
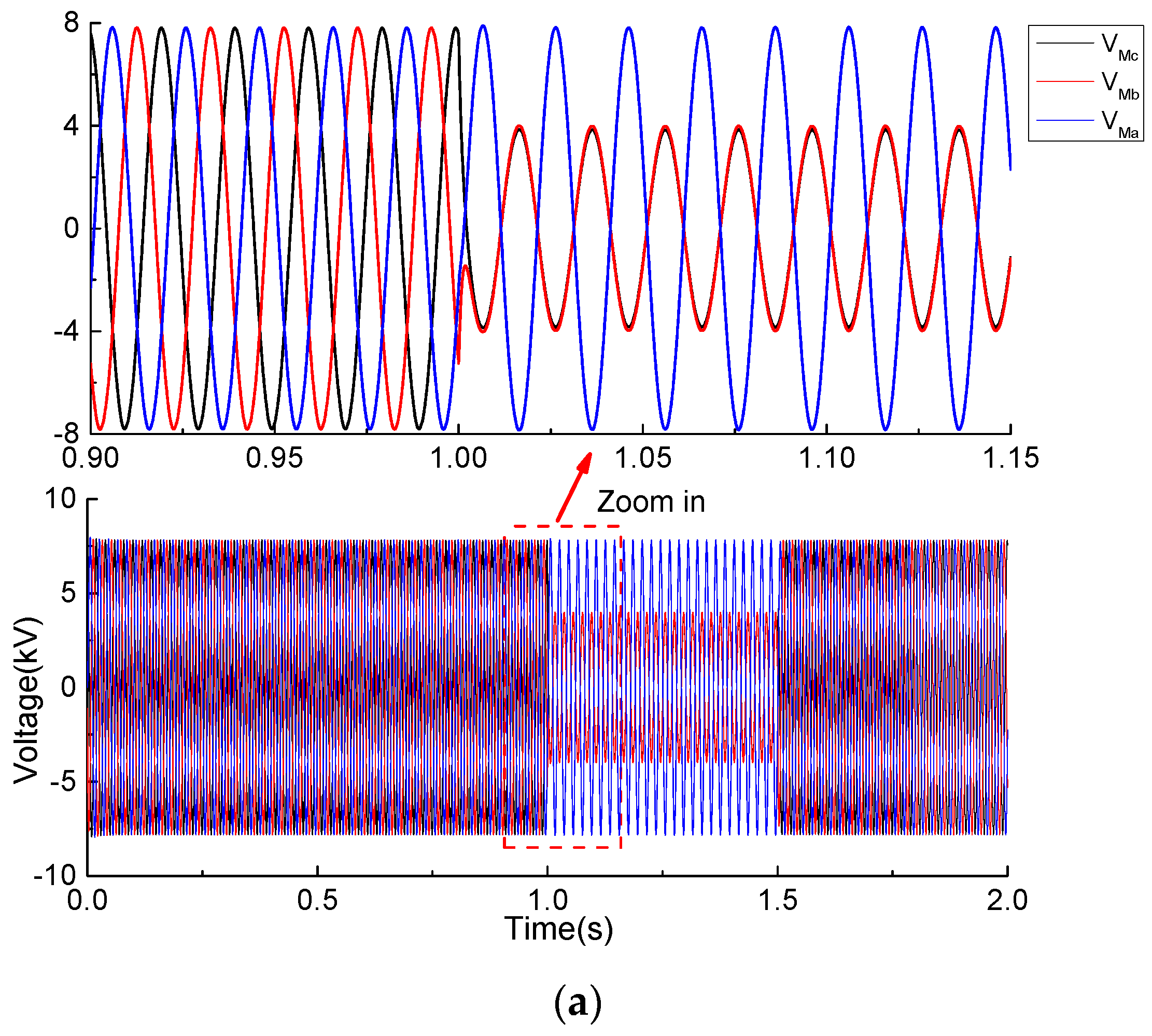
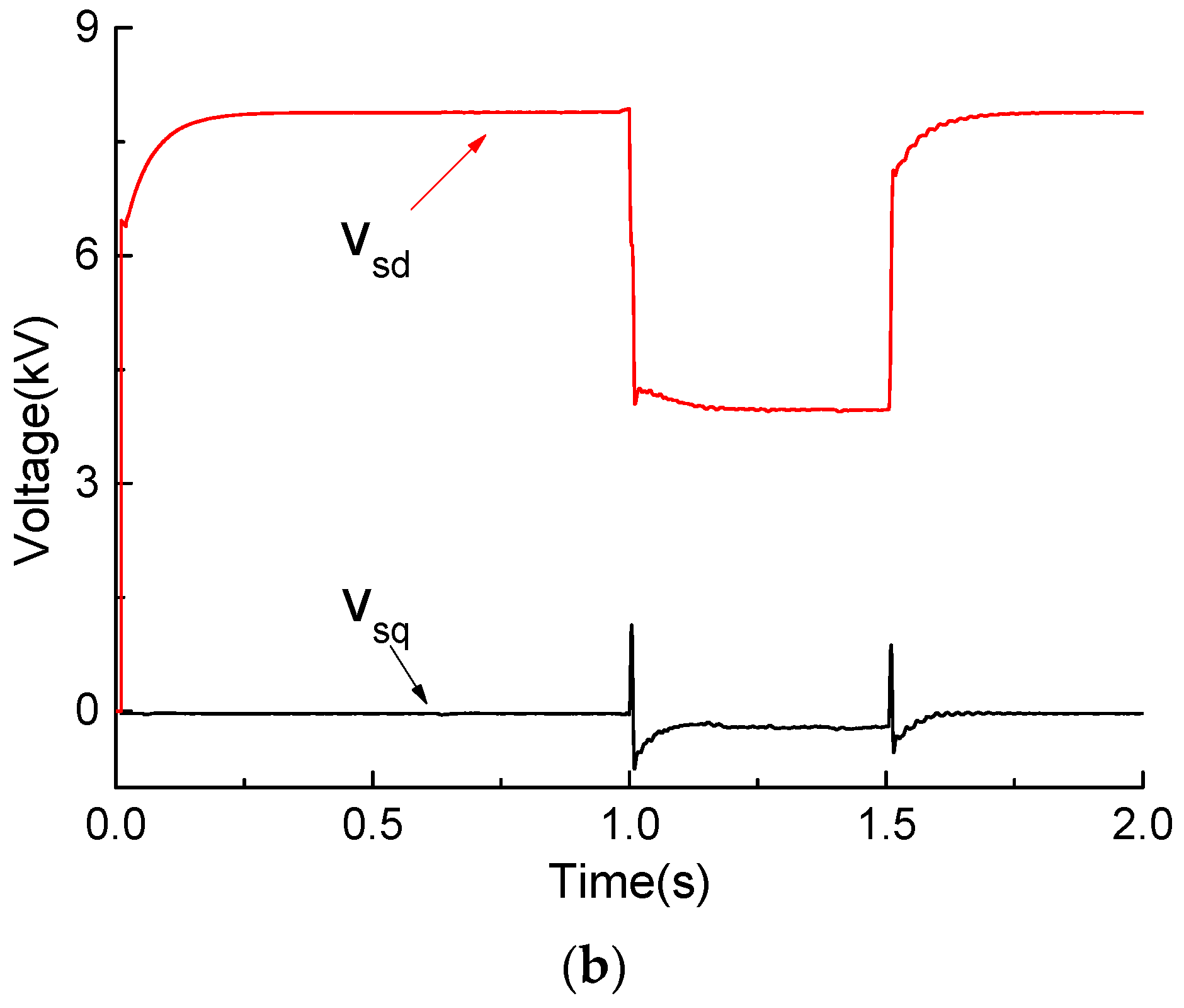
Figure 12 and
Figure 13 show the three-phase voltages for both systems and their
d-q waveforms. It can be seen that the voltages of the primary side system maintain their rated values in both normal and fault conditions and are not greatly affected (as shown in
Figure 12a), while the voltages of the BC-phase in the secondary side system decrease when the fault occurs, as shown in
Figure 13a.
The active power
P1 of the primary side and the active power
P2 of the secondary side system can be seen in
Figure 14, which clearly shows that the active power can quickly track its set values. Furthermore, the whole system can still maintain stable operation and transmit a certain amount of active power during the fault period. Additionally, there are no double-frequency oscillations in the active/reactive power of the primary side system, but double-frequency oscillations do appear in the secondary side system during the fault, as shown in
Figure 14.
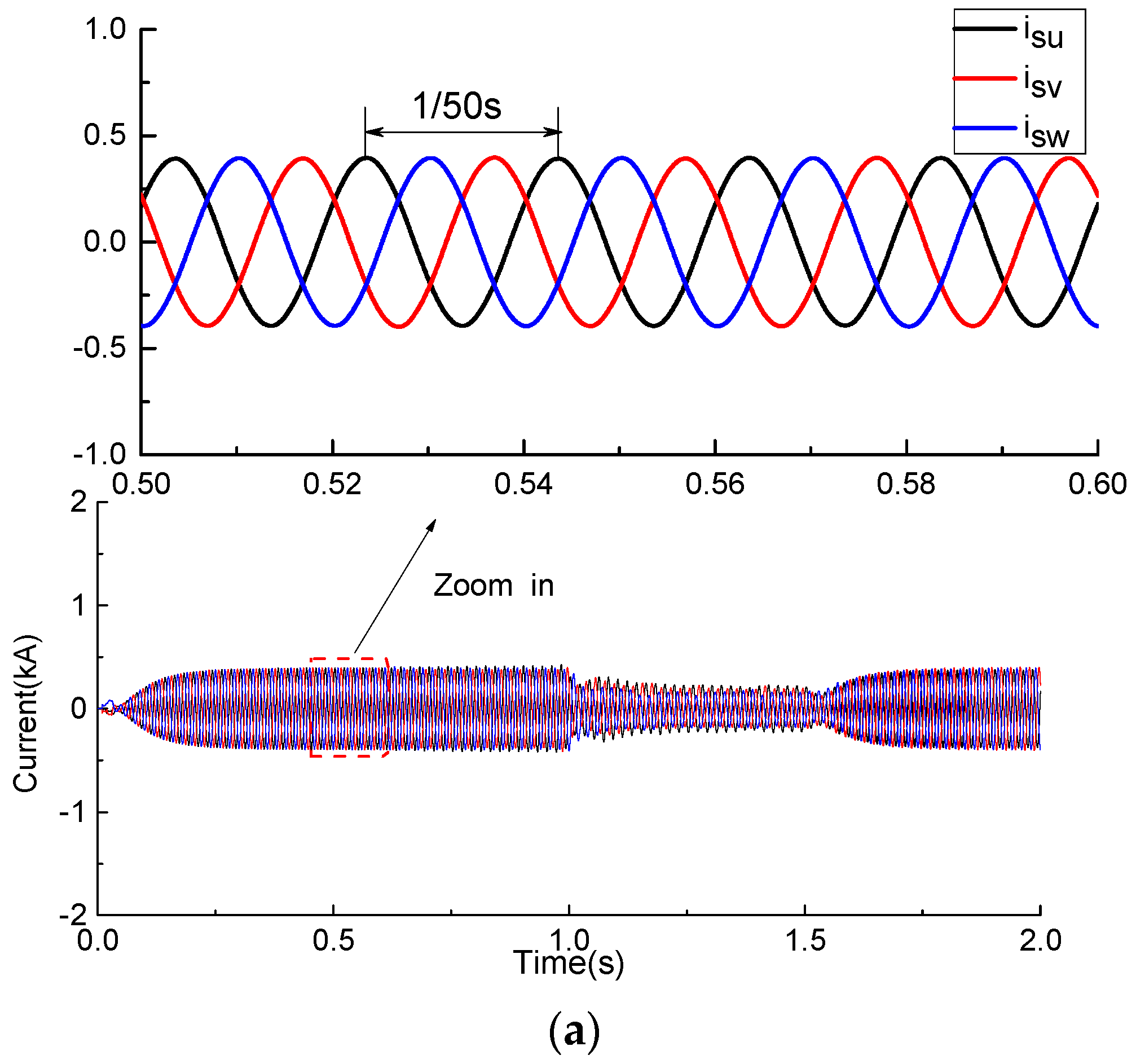
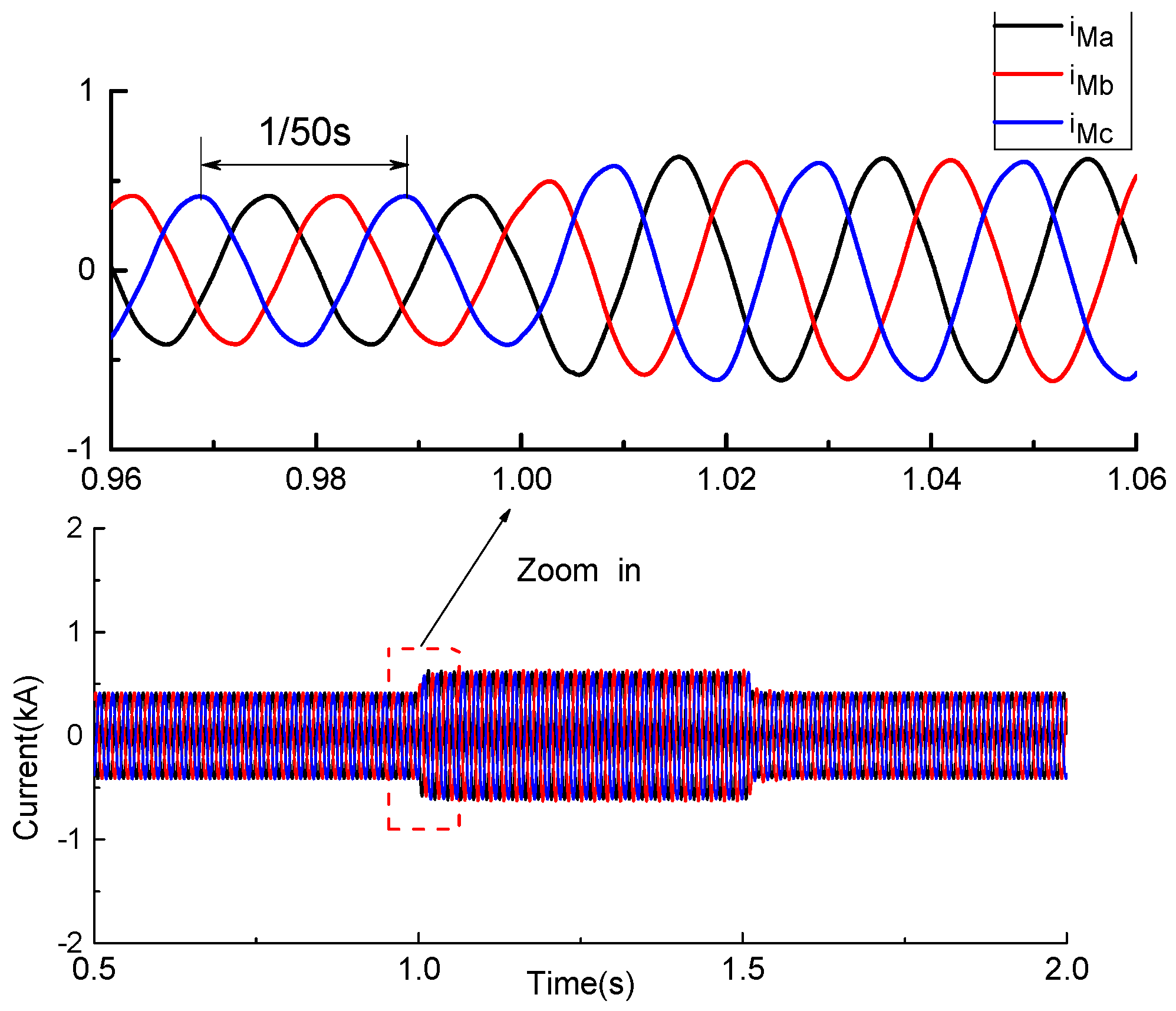
As depicted in
Figure 15 and
Figure 16, the frequencies of both systems are 50 Hz, and when the fault appears, the currents of the primary side system decrease due to the system’s decreased active power, while the currents of the secondary side system increase (as shown in
Figure 16). When the fault is cleared, the system currents on both sides are restored to the initial value, with a change in the active power.
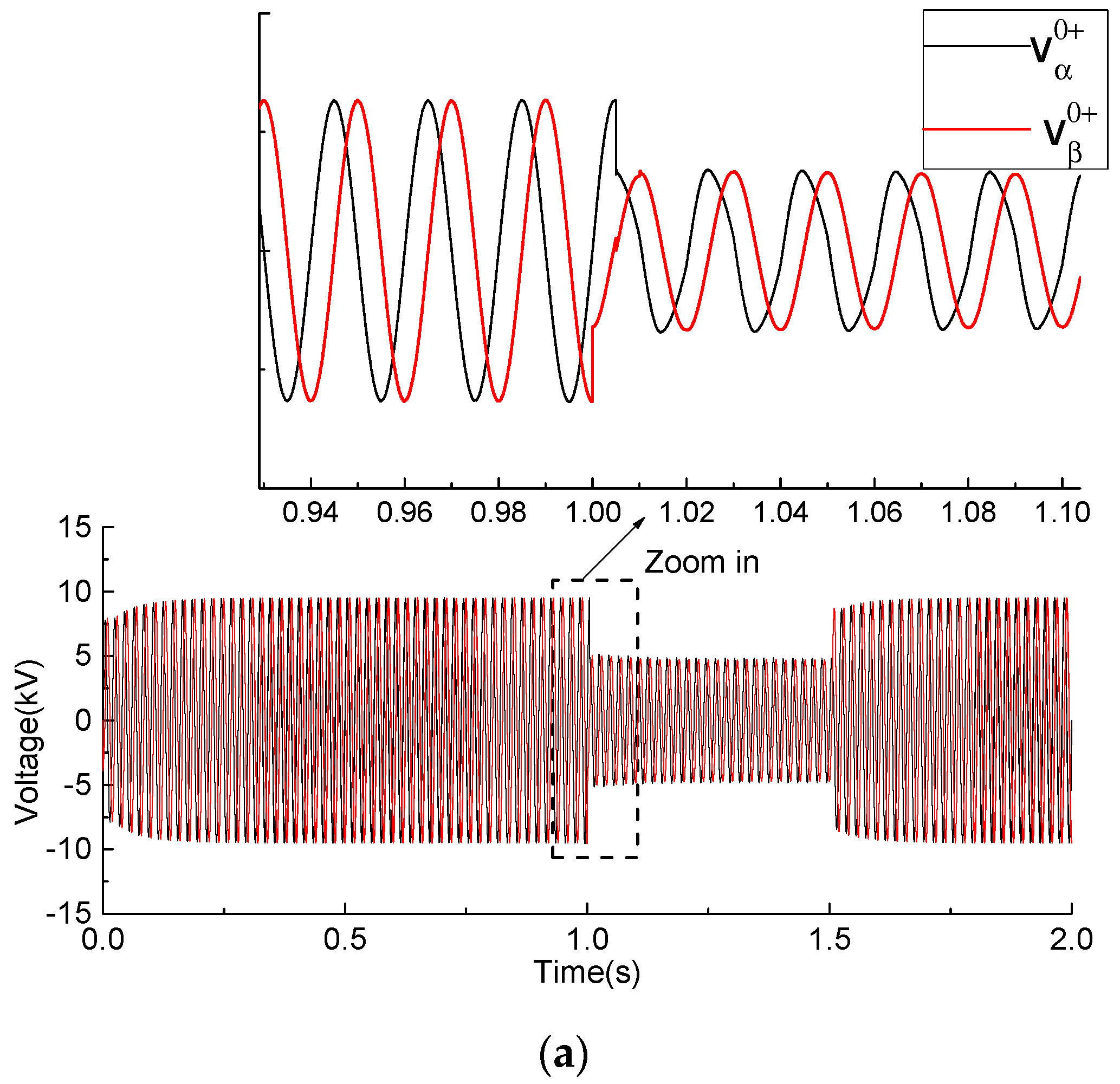
Figure 17 shows the positive and negative sequence components of the secondary side system voltage in αβ reference frames. As depicted in
Figure 17b, as soon as the fault is applied, the negative sequence voltage components appear at t =1 s and disappear rapidly with the removal of the asymmetric fault at t = 1.5 s.
The branch module voltage is multilevel, which can be seen in
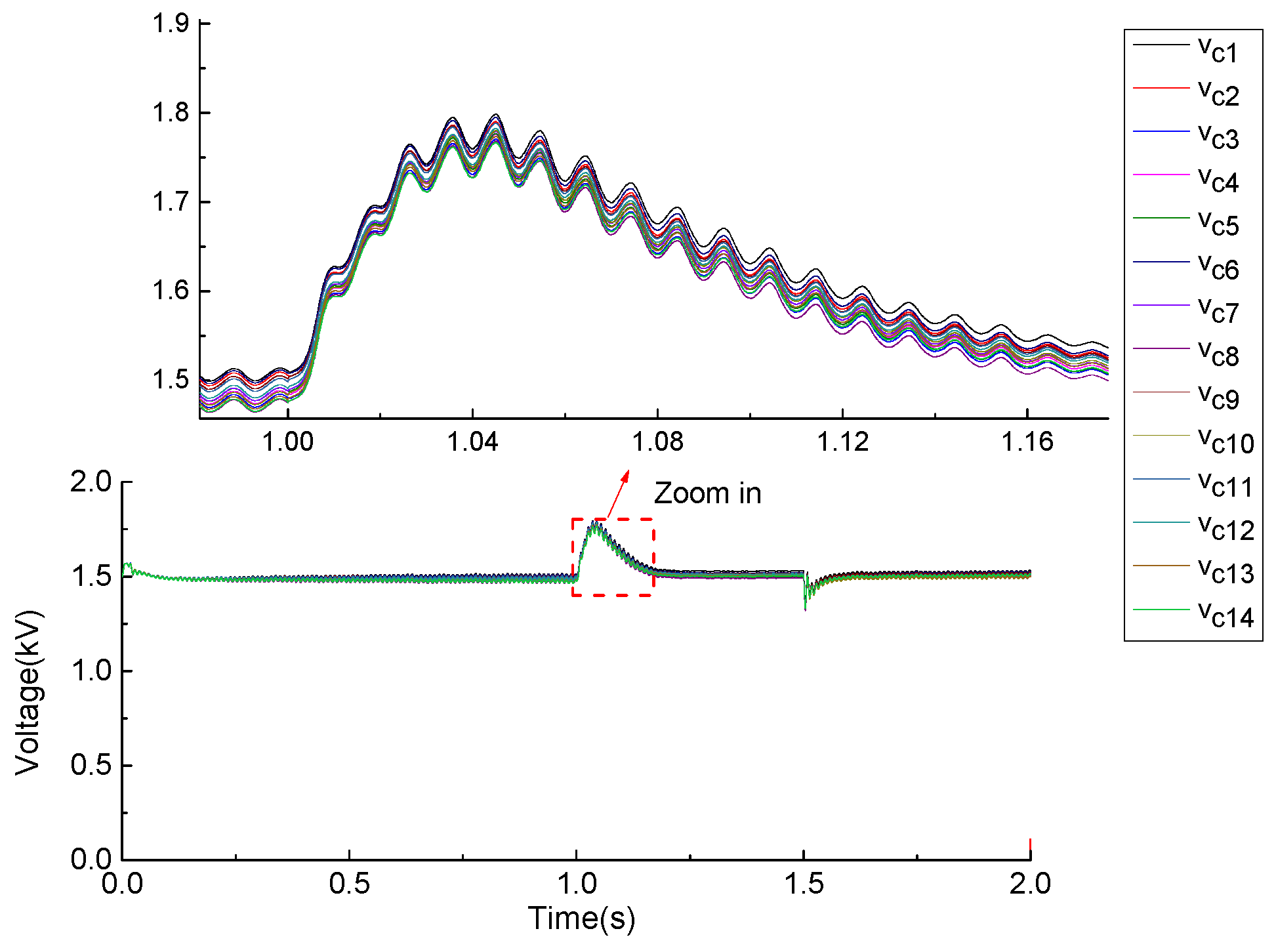
Figure 18, and its amplitude decreases slightly during the fault. The capacitor voltages are illustrated in
Figure 19. When the fault appears, a slight increase can be observed. The capacitor voltages are balanced, and their fluctuations are within an acceptable level.
In summary, all the above waveforms show that the system can still operate stably in the case of an AC asymmetric fault, thereby confirming the effectiveness of the proposed control strategy.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






















