1. Introduction
Modern power systems are facing high complexity and sensitivity. One of the aspects of these grids and also future power system is the high penetration of distribution generations (DGs) into the network, which raises several issues. Islanding detection is a serious problem that emerges in this environment. In the islanding situation, one or more of the DGs and a portion of the network become separated from the main grid and continue to energize the islanded network. Due to several concerns, such as safety hazard, personal safety, and out-of-phase reclosing, islanding detection has vital importance. The islanding should be detected less than two seconds, according to the IEEE 1547 standard [
1] and also with the respect of the re-closer operation. The re-closer constant time usually is less than 500 ms, hence the time of detection is a critical issue to discriminate islanding before the operation of the re-closer. Furthermore, some grid codes [
2] imply that the DG should have the capability to continue to operate in the autonomous islanded mode. Therefore, the islanding is detected to the purpose of disconnecting the DG or preparing the DG to operate in the new control mode after the occurrence of the islanding.
In general, islanding detection methods can be classified into remote and local techniques. Remote techniques detect the islanding situation using communication links between the DG and the point of common coupling (PCC), which connects the network to the upstream grid [
3,
4,
5,
6]. In Reference [
5], islanding can be detected using PMU measurements. Power line signaling utilized in Reference [
6] to detect the islanding by transmitting and an insignificant signal from the DG bus and receiving it at the circuit breaker point. Remote methods detect the islanding with a negligible or even zero none detection zone (NDZ). In addition, these techniques are fast in the detection of the islanding situation and discriminating islanding from grid-connected disturbances. However, the main drawbacks of the remote methods are their high cost, risk of loss of communication links, and requiring to the backup protection problem.
Local methods can be divided into active and passive ones. A disturbance is added to the system deliberately to detect the islanding situation in the active methods. Consequently, active methods can be designed based on the type of DG. Hence, the active methods are used for specified types of DGs. In addition, in some active methods, the disturbance signal is not added to the system by means of the DG. For instance, inserted capacitor or condenser to intentionally disturbing the equality power mismatches to detect the islanding situation [
7,
8]. Some of the active methods for inverter-based generators are Sandia frequency shift [
9], current harmonic injection [
10], active frequency drift [
11], voltage drifting technique [
12], and positive feedback method [
13]. Capability issue of current injection method is investigated in Reference [
14] and a solution to solve this problem is also introduced based on considering only certain high frequency components as injected current. Likewise, in References [
15,
16,
17], islanding detection methods for synchronous based generators are presented. In Reference [
15], two positive feedback for active and reactive power control loops are presented to make the system unstable in the islanding situation. Afterwards, in Reference [
17], new active and passive power control loops proposed to simultaneously improve the ride-through capability of the synchronous generator, as well as detecting islanding-situation. Integral controllers are added to the governor, and excitation system of the synchronous generator are added in Reference [
16] to make the system marginally unstable in the islanding situation. In Reference [
18], two modified active and reactive power control loops of synchronous DG is presented to make the system marginally unstable in islanding situation. Moreover, a signal processing technique is used to detect a feature which indicates the islanding conditions. A method to control the active and reactive power outputs of inverter-based DGs using two probabilistic phasing neural network controllers has been presented in Reference [
19]. Active techniques can interfere with other devices which inject the disturbance to the system and also non-linear loads. Also, power quality degradation is another drawback of the active islanding methods.
Passive methods are based on monitoring the electrical quantities of the system. In this manner, the islanding is detected by violating the presets thresholds. Over/under voltage or frequency relays are the most common passive loss of mains detection [
20]. Vector surge relays [
21] are another type of passive islanding detection technique. Rate of change of frequency (ROCOF) is another common islanding detection method [
22] which has large NDZ. In addition, setting the threshold of the ROCOF is a direct compromise between reducing the NDZ and maloperation in non-islanding events. Also, the voltage measurement-based methods, such as the rate of change of voltage (ROCOV) [
8] have an unsuccessful operation to distinguish islanding condition, especially in the case of reactive power imbalance. Afterwards, the rate of change of phase angle difference (ROCPAD) is presented in Reference [
23]. The maloperation in short circuit fault is the main drawback of these methods. Signal processing techniques are other passive methods that have been introduced recently [
24,
25,
26]. The wavelet transform is used in References [
25,
26] to detect the islanding and minimize the NDZ. A passive method for inverter-based DGs introduced in Reference [
27] by combining the help of close loop frequency control and a high frequency impedance detection method. In Reference [
28], learning methods have been developed to extract the features which illustrate the difference between islanding and grid connected conditions. At first, different features are analyzed using signal processing methods and then these features applied to a deep learning-based algorithm to classified islanding and grid connected disturbances. A voltage index has been used in Reference [
29] to detect the islanding condition for large power imbalances, also for small power imbalances, the line current measured to disconnect some loads, due to transfer small imbalances to large power mismatches.
This paper proposes a passive islanding detection technique to eliminate the NDZ and improve the detection time. The measured values of the frequency, voltage, and current are used in the proposed technique to discriminate between islanding and non-islanding conditions. Also, a method to accurately calculate the phase angle difference between voltage and current is proposed in this paper for real-time applications. In addition, the proposed islanding detection technique can be used for all types of the DGs and without depending on the load type of the system. Performance of the proposed method can be retained when multiple DGs are connected to the islanded network. The maximum islanding detection time using the proposed islanding technique is 6 ms even though the power mismatch is zero. The detection time is reduced by increasing the power imbalances based on the proposed technique. The main contributions of this paper can be summarized as follows:
The detection time of islanding conditions is improved significantly using the proposed novel islanding detection method;
Mal-operation in grid connected disturbances, such as short circuit faults are well-prevented using the proposed method;
Since the proposed method is simple and is based on common protection relays, and it can be easily implemented practically;
The proposed method can be applied for all types of DGs without degrading the power quality of the system.
2. Proposed Algorithm
Many methods have been proposed for islanding detection. The main concept of most islanding detection methods is that some system parameters (like the voltage, frequency, etc.) change greatly in islanding mode, while they do not change significantly when the distribution system is grid connected. In some cases, existing methods do not recognize islanding mode and cause mal-operation. In addition, these methods may have maloperation in power system disturbances like short circuit faults. This paper, by combining different methods that are described below, provides a new algorithm that has a better operation for islanding detection.
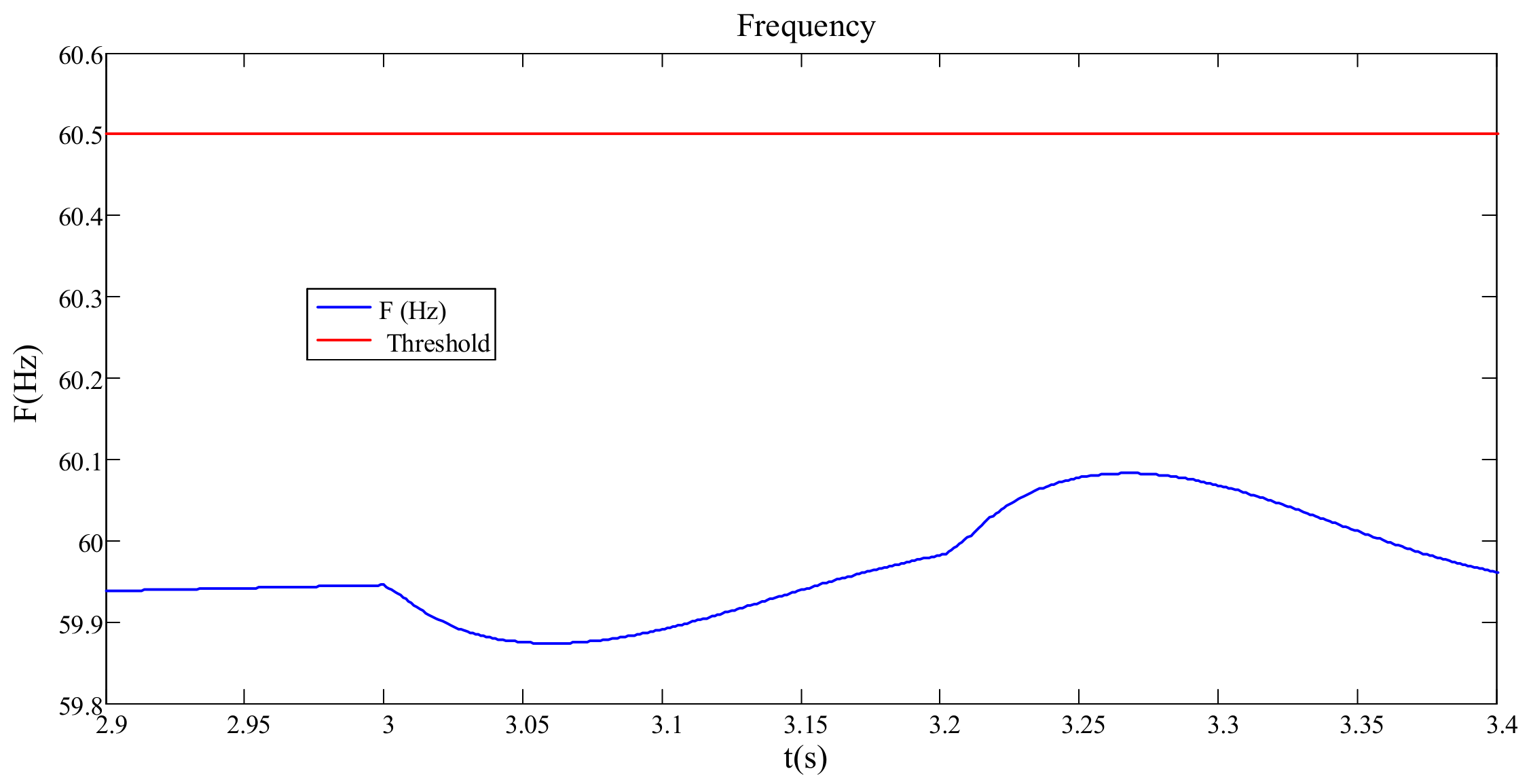
One method for generator’s islanding detection is the use of under frequency (UF) and over frequency (OF) relays (
Figure 1). When islanding mode happens due to the power mismatch between load and generation, generator’s speed changes according to Equation (1) [
30].
where:
| H | Inertia constant (MW-s/MVA) |
| ω | Synchronous speed (p.u.) |
| Pm | Mechanical power (p.u.) |
| Pe | Electrical real power (p.u.) |
Frequency depends on speed; therefore, when speed changes, the frequency will also change. If the generation is greater than demand, the frequency will increase, and it will decrease if the generation is less than load. The islanding mode will be detected if the frequency drops below or increases above a defined setting for a time greater than a defined delay.
In this paper, frequency is calculated using the PCC voltage. First, the frequency range is estimated using the zero-crossing method. Then, using the least squares error (LSE) method, it is calculated accurately.
Consider the main signal as follows:
where:
| V(t) | Measured voltage (V) |
| ω | Angular speed (rad/s) |
| VP | Peak of voltage (V) |
| θ | Angle (rad) |
| t | Time (s) |
By sinusoidal expansion, Equation (2) becomes Equation (3).
Equation (3) is expended by using Taylor’s sinus and cosine expansions to obtain Equation (4).
where Δω is equal to change in angular speed. There are six unknowns in Equation (4), so at least seven equations are needed to calculate the unknowns by LSE method. In other words, at least seven samples are required to estimate the frequency. To calculate angular speed variations, the known variable and unknown variable of Equation (4) are separated and written as Equation (5). Finally, by adding frequency changes to the base frequency obtained from zero crossings, the frequency is calculated according to Equation (7).
Where,
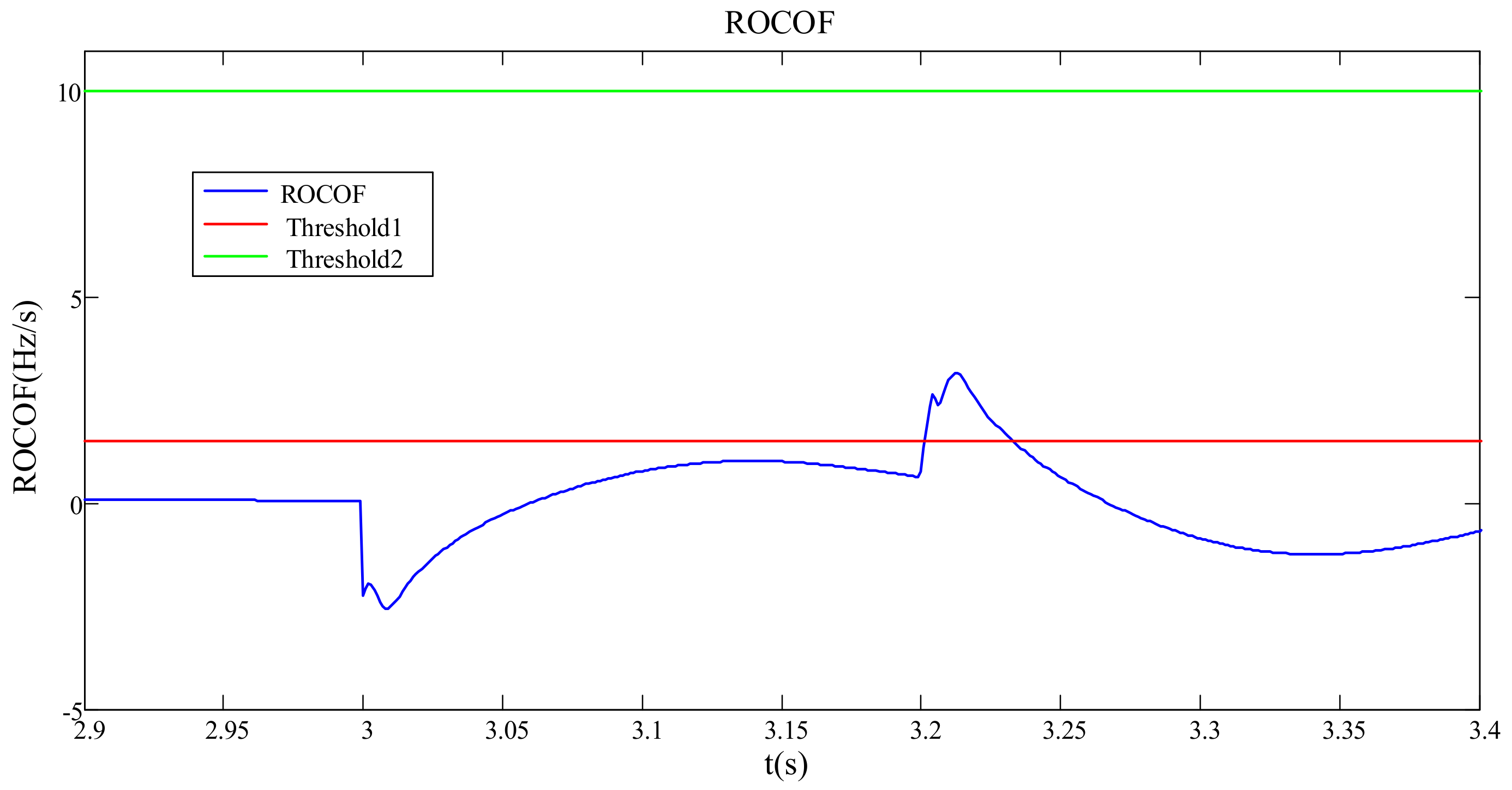
Rate of change of frequency (ROCOF) is an important technique for islanding detection. In low power mismatches, the frequency decreases slowly, and it takes a long time to exceed the relay set point. Therefore, islanding mode is detected faster using the ROCOF method. The ROCOF method is based on the theory that there is a mismatch between generation and load when islanding mode happens. Immediately after islanding, because of the power mismatch, the frequency will change dynamically, which neglecting the governor action can be approximated by Equation (8).
where:
| f | Frequency (Hz) |
| PL | Load in the island (MW) |
| PG | Output of the distributed generator (MW) |
| SGN | Distributed generator rating (MW) |
| H | Inertia constant of generating plant (MW-s/MVA) |
| fr | Rated frequency (Hz) |
ROCOF is determined by deriving of the frequency which is obtained by the LSE method. The ROCOF is measured to compare it with the set threshold limit. If its value exceeds the pre-specified threshold limit, islanding is detected. The block diagram of the ROCOF method is shown in
Figure 2.
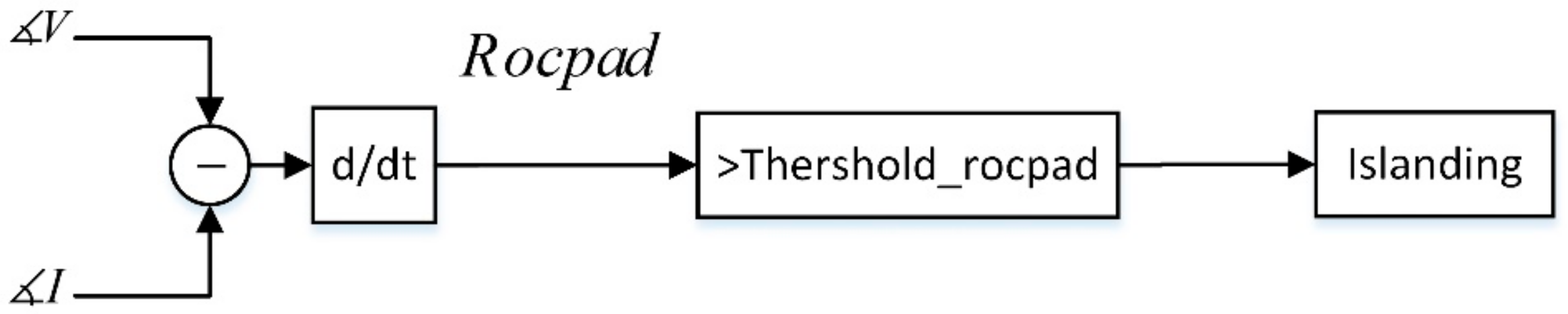
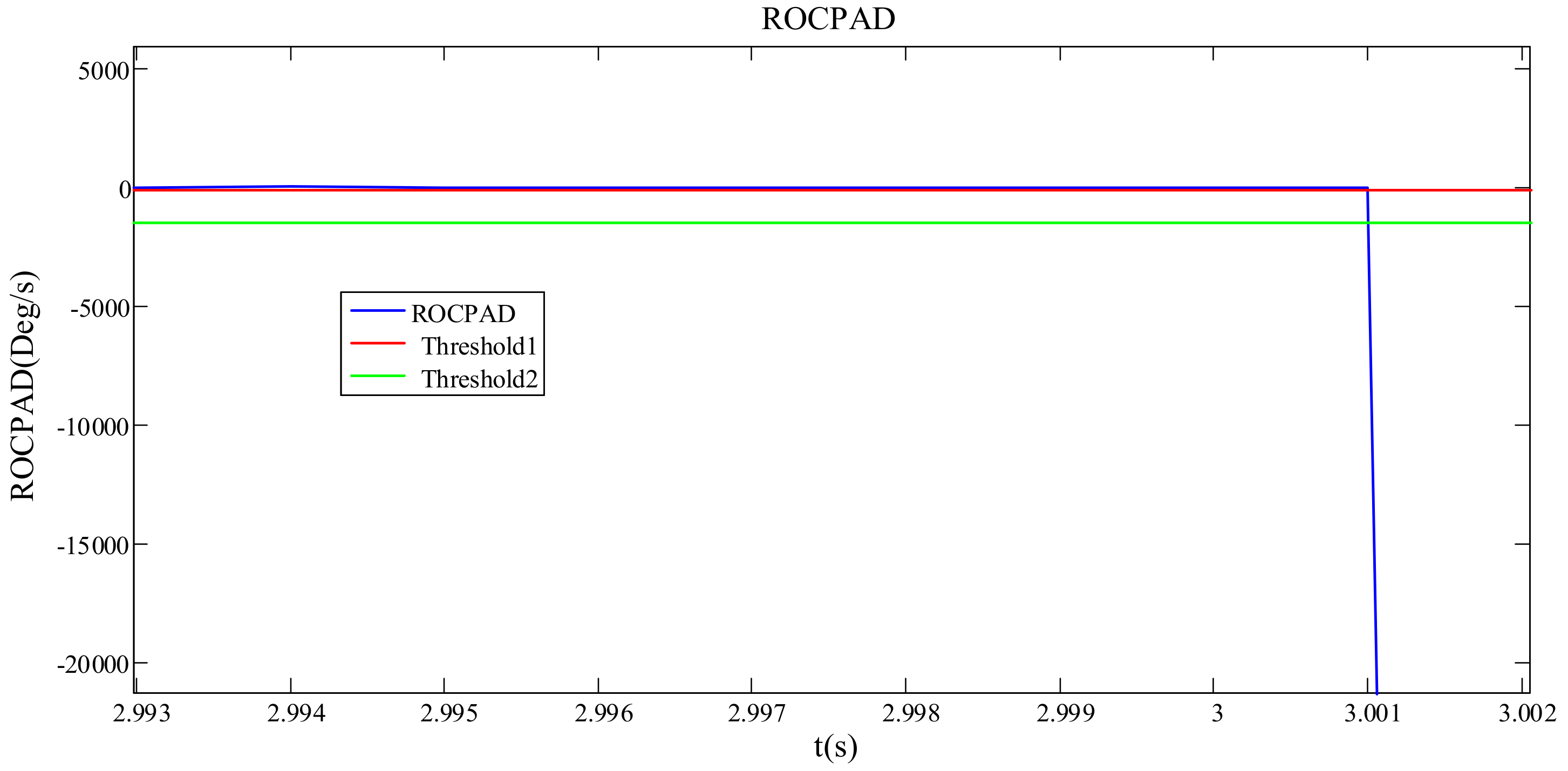
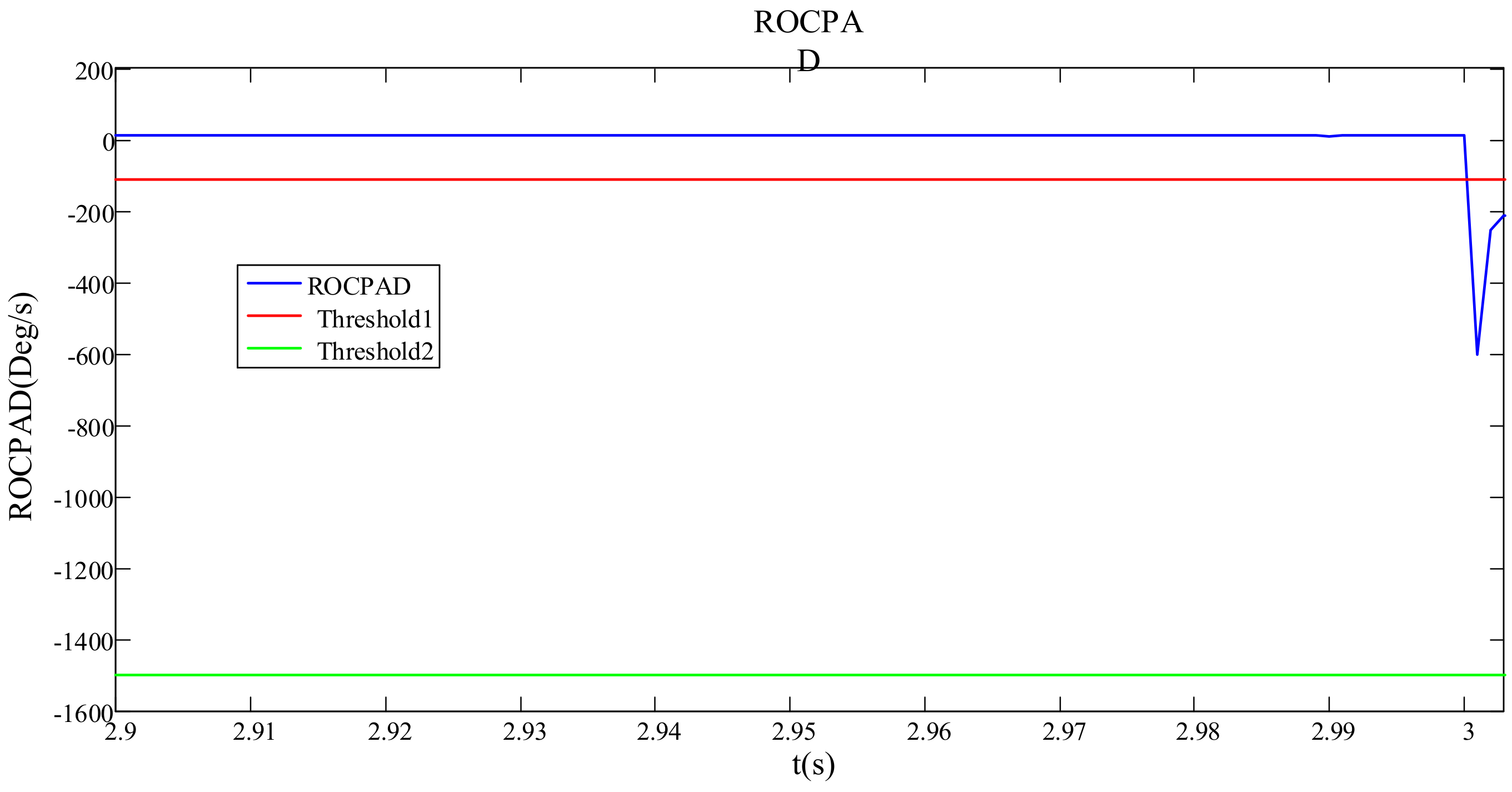
Another method of islanding detection is ROCPAD. The fundamental of this method is based on the rate of change of phase angle difference at DG end. The process starts with measuring voltage and current signal at the DG end, and then from the phase angle information of the voltage and current signals, the ROCPAD is computed for islanding detection. The five-sample LSE method is used to find the current and voltage angle.
The voltage signal is sampled at t = t
0:
where
θv is the phase angle of the voltage signal. Equation (9) can be written as Equation (10):
Consider Equation (10) as Equation (11):
where,
It is done for four other voltage samples, and five equations are obtained similar to Equation (11). The matrix form of these equations is given by Equation (12),
The unknown values of matrix X can be calculated from Equation (13),
Finally, voltage angle is calculated from Equation (15). It is also done for the current signal to get the current angle.
The ROCPAD can be calculated by deriving of the difference between the voltage and current angle. Islanding happened when its value exceeds a defined threshold. The block diagram of the ROCPAD method is shown in
Figure 3.
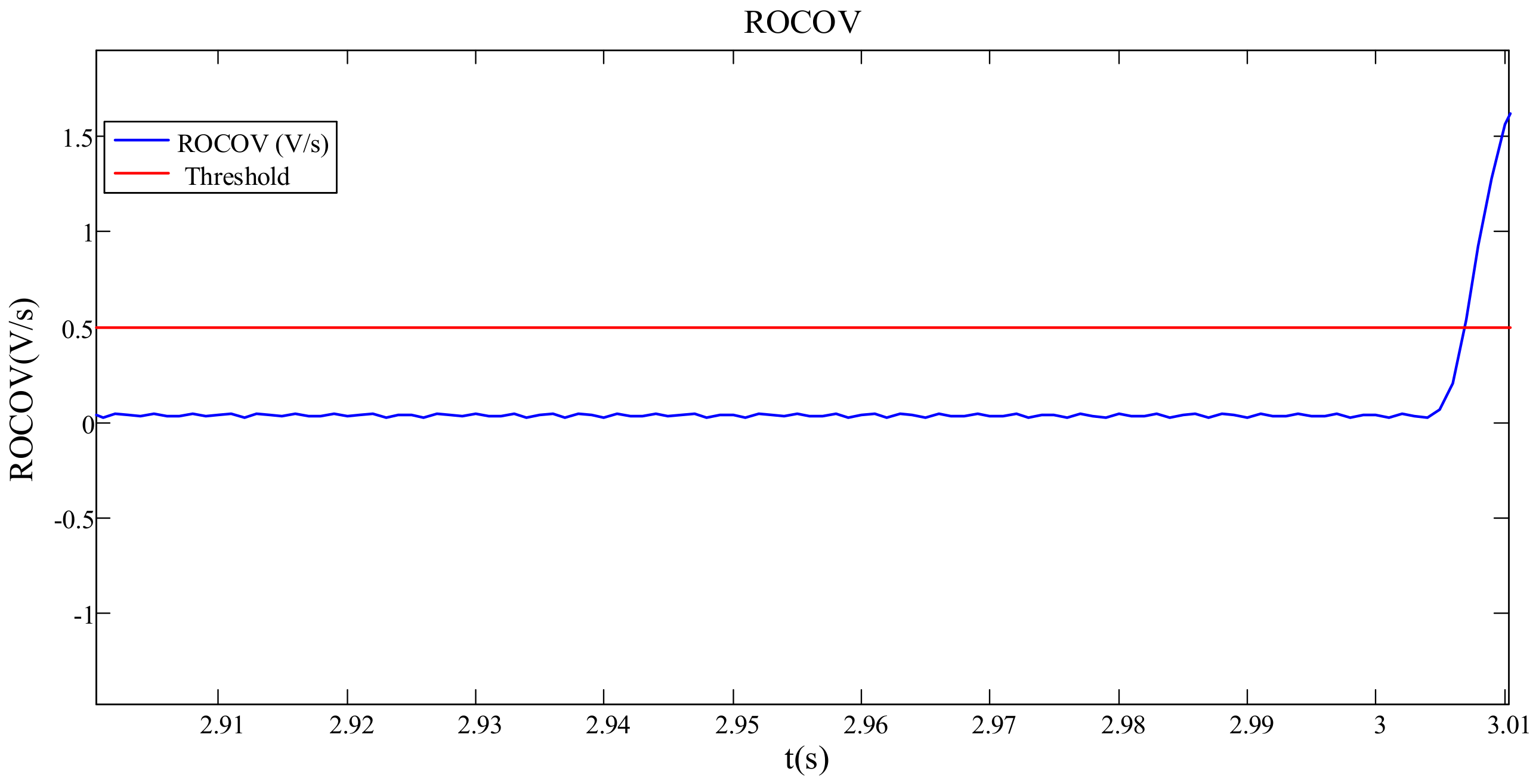
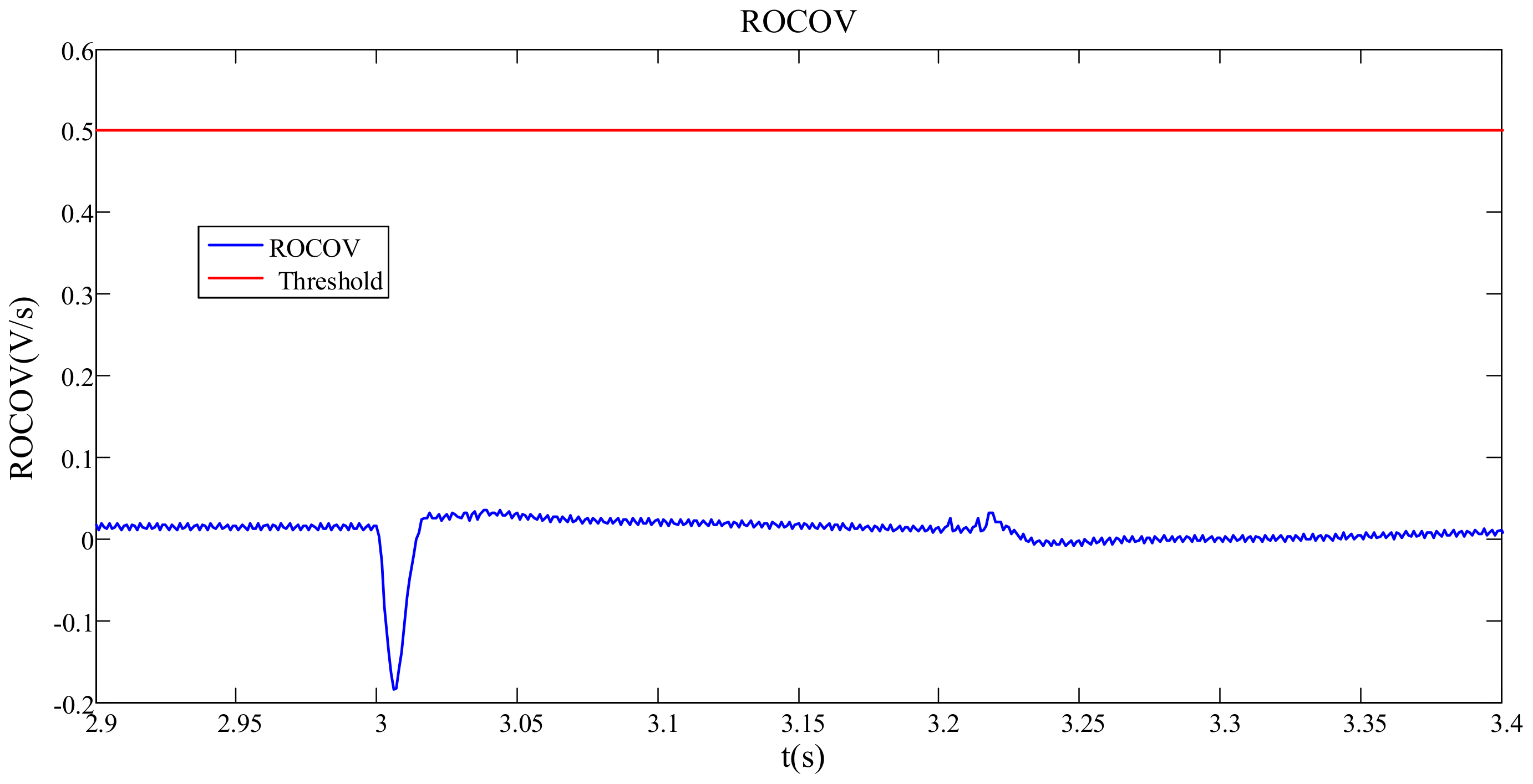
The rate of change of voltage, which is known as ROCOV index is one of the islanding detection methods. Most of DGs are required to operate at unit power factor. Thus, the lack of active power will be possible. Change of voltage is a function of reactive power, and as a result of the change of reactive power, the voltage will be changed. Capacitor banks may be the only available source of reactive power in the islanded network with DG operating in unit power factor. The amount of reactive power generated by capacitor banks is a function of the voltage. When the voltage changes, as a result of islanding, the reactive power which capacitor banks generate will also change, and it will change the voltage further. Thus, when reactive power mismatch has a large value, this causes a change in the voltage, so ROCOV value exceeds a preset threshold and islanding mode is detected.
Different methods of Islanding detection are described above. Each of these methods has problems that cause mal-operation or maloperation. The operation of OF/UF relays depends on the frequency. If the mismatch between the generation and load in the islanded network is low, then the frequency will have small changes. Therefore, it may not exceed the threshold limit and leads to false detection. On the other hand, when short circuit faults happen in power systems, the frequency decreases, due to a sudden decrease in load. In this situation, this method may operate incorrectly.
ROCOF method measures the rate of change of frequency, and once the rate of change of frequency exceeds the pre-determined setting, a trip signal is initiated. Similar to OF/UF relays, when active power imbalance in the islanding system is low, the frequency changes slightly. Therefore, the ROCOF method may become ineffective. In addition, network transient events may also cause changes in system frequency, resulting in the incorrect operation of the ROCOF method.
The reactive power imbalance is the detection criterion of the ROCOV method. If a load with a low power factor is disconnected from the network in a normal situation, the reactive power imbalance will have a large value. Therefore, the voltage changes and the ROCOV method may operate incorrectly. On the other hand, when reactive power imbalance in the islanding mode has small variation, the ROCOV value does not sense the threshold and cannot detect the islanding mode.
The ROCPAD method was proposed to solve the maloperation of the ROCOF, and OF/UF relays in the low power mismatch. This method even detects islanding mode with 0% power mismatch. However, the ROCPAD method may have mal-operation during a short circuit fault.
This paper, by combining ROCOF, ROCPAD, ROCOV, and OF/UF relays, presents an algorithm that solves the problems of previous methods. All previous methods can detect islanding mode. However, a more secure operation is achieved using the proposed algorithm. The proposed islanding detection algorithm is shown in
Figure 4.
In the proposed algorithm, the combination of ROCOF, ROCPAD, ROCOV and OF/UF relays is used to detect islanding mode fast. The operation time is an important parameter in protection algorithms. There is a direct relationship between the time of detection and the threshold value in classic methods. In order to fast operation, the ROCOV, ROCOF, OF/UF and ROCPAD methods with suitable setting are combined in the proposed method. As the operation speed of the classic algorithm increases, the probability of mal-operation will also increase. The proposed method can provide security and fast operation simultaneously.
The proposed algorithm can tackle the problems of classic algorithms by a logical combination of their output. The ROCPAD relay may have mal-operation in power system short circuit faults. While the mal-operation problem is solved by raising the threshold of this relay, the operation time increases. In the proposed method, two ROCPAD relays with different threshold are used for fast and secure operation. The first ROCPAD relay (ROCPAD-threshold1) has a lower threshold and is faster.
As mentioned above, the ROCOF, ROCPAD and OF/UF relays may have mal operation in power system short circuits. In short circuit faults, the voltage suddenly drops and reaches to a new value after a short time, but the voltage drops slowly in islanding mode. Using this rule, short circuit faults are separated from islanding modes. The ROCOV relay which measures the rate of change of voltage can separate short circuit faults from islanding mode. Therefore, the output of the ROCOV, ROCOF, ROCPAD and OF/UF relays are connected together by a logical AND gate to limit their operation in short circuit faults.
The second ROCPAD relay (ROCPAD-threshold2) has a higher threshold. Hence, it does not recognize short circuit faults as islanding mode. Its trip signal is connected to the output with a logical OR gate. If the first ROCPAD relay is limited, islanding will be detected through the second ROCPAD relay.
There is a direct relationship between the time of detection and the threshold of ROCOF relay. By reducing the threshold, as the islanding detection speed is increased, the probability of wrong detection increases. Therefore, Similar to ROCPAD relay, two ROCOF relays with different threshold are used in the proposed method. The first ROCOF relay (ROCOF-threshold1) has a lower threshold and operate faster. Noises and the transient faults change the frequency quickly. In this situation, the ROCOF value may exceed its threshold, while the frequency does not change significantly. In order to block the operation of the first ROCOF relay under transient faults and noises, the trip signal of it and OF/UF relay combined with a logical AND gate. The second ROCOF relay (ROCOF-threshold2) with higher threshold operates in parallel with second ROCPAD relay to enhance security.
The operation of the proposed algorithm in three general network modes is as follows:
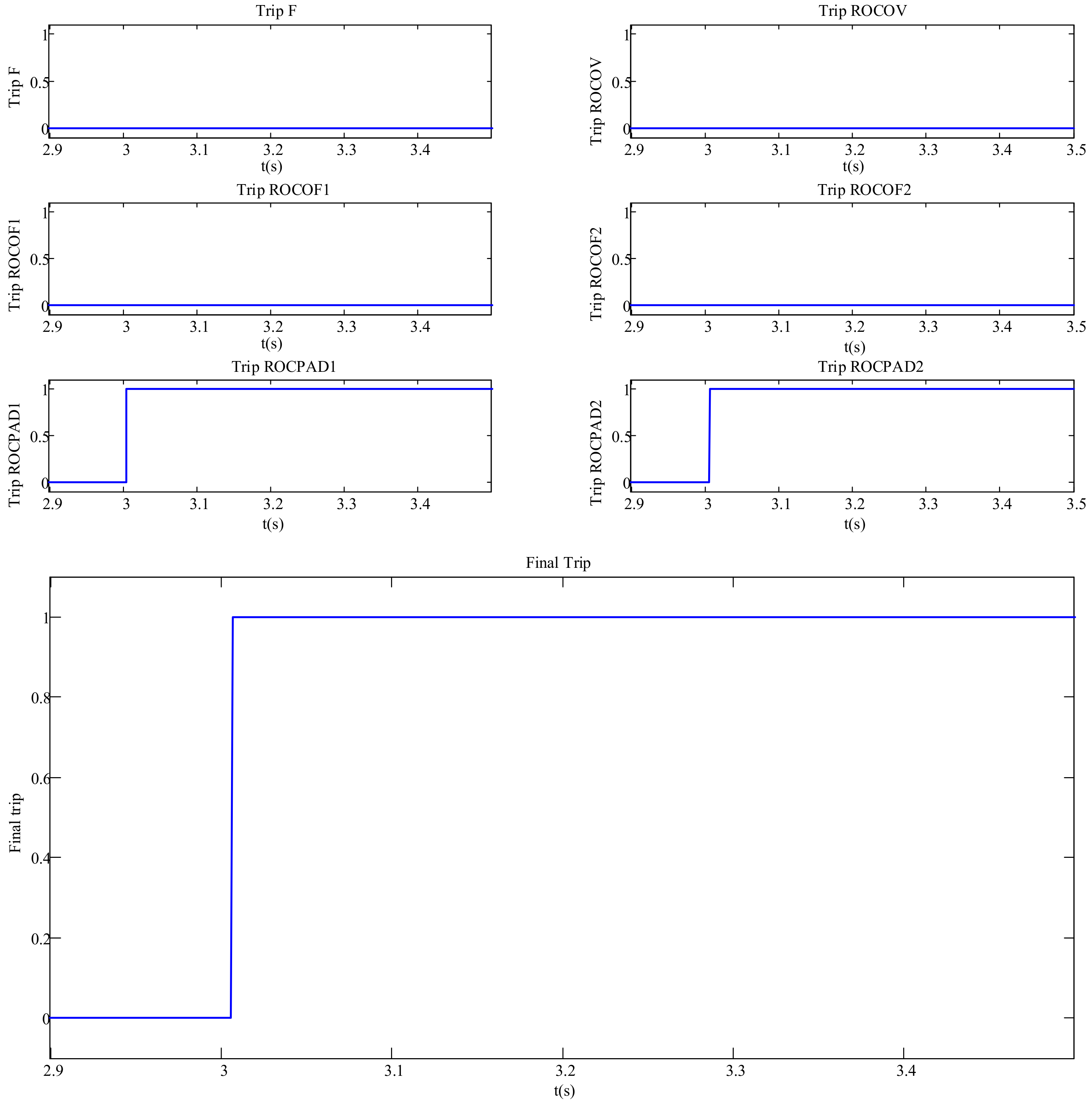
When islanding mode happens with high power mismatch, the frequency and voltage change significantly. As a result, the ROCOF, ROCOV and OF/UF relays detect islanding mode, and the output of their AND gate becomes one. On the other hand, the voltage and current phase angle difference begin to increase in islanding network and lead to the output of ROCPAD relay become one. Finally, the output of the second AND gate becomes one and islanding will be detected. In this case, the second ROCPAD and ROCOF relays will detect islanding mode with a time delay after islanding detection by a combination of the first ROCPAD. First, ROCOF, ROCOV and OF/UF relays. Fast operation in high power mismatch is essential, due to high power mismatch causes the generator to become unstable and damages to network equipment. The proposed algorithm by a combination of ROCPAD, ROCOF, ROCOV, and OF/UF relays with low threshold provides fast operation in high power mismatch.
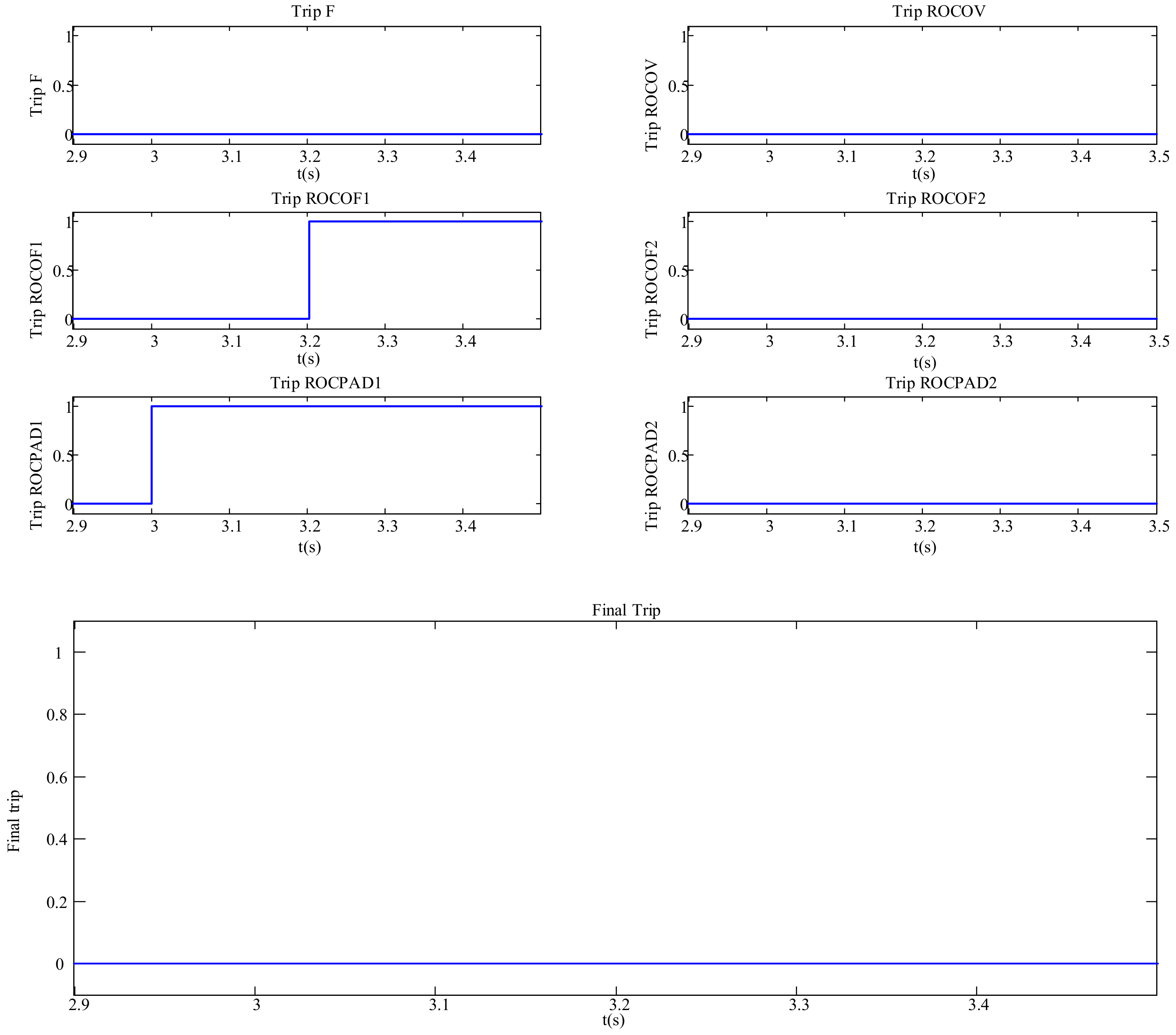
When islanding mode happens with low power mismatch, ROCOF, ROCOV, and OF/UF relays may not detect islanding mode. As a result, the output of their AND gate becomes zero. The voltage and current phase angle difference even in low power mismatch increases. Thus, the ROCPAD value exceeds the threshold limits, and the output of ROCPAD relay becomes one. The output of AND gate related to the output of ROCPAD relay and output of first and gate becomes zero. Therefore, the ROCOF, ROCOV and OF/UF relays limit the operation of the first ROCPAD relay. In this situation, the islanding mode is detected by the second ROCPAD relay with a time delay. In islanding mode with low power mismatch, the voltage and frequency change slightly in the islanded grid. Thus, it is last a longer time for the generator to become unstable, and the generator can be separated from the islanded grid with more time delay.
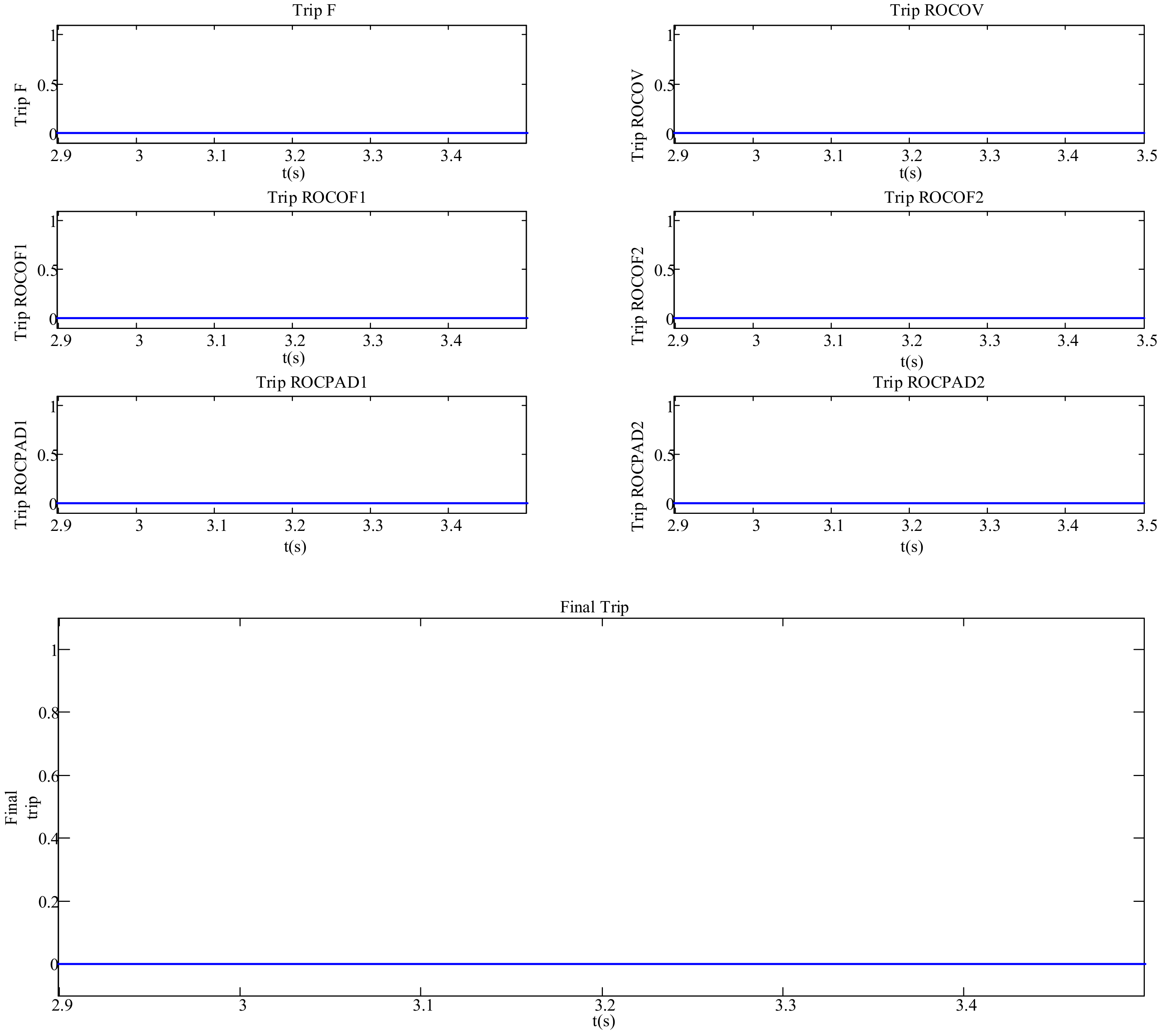
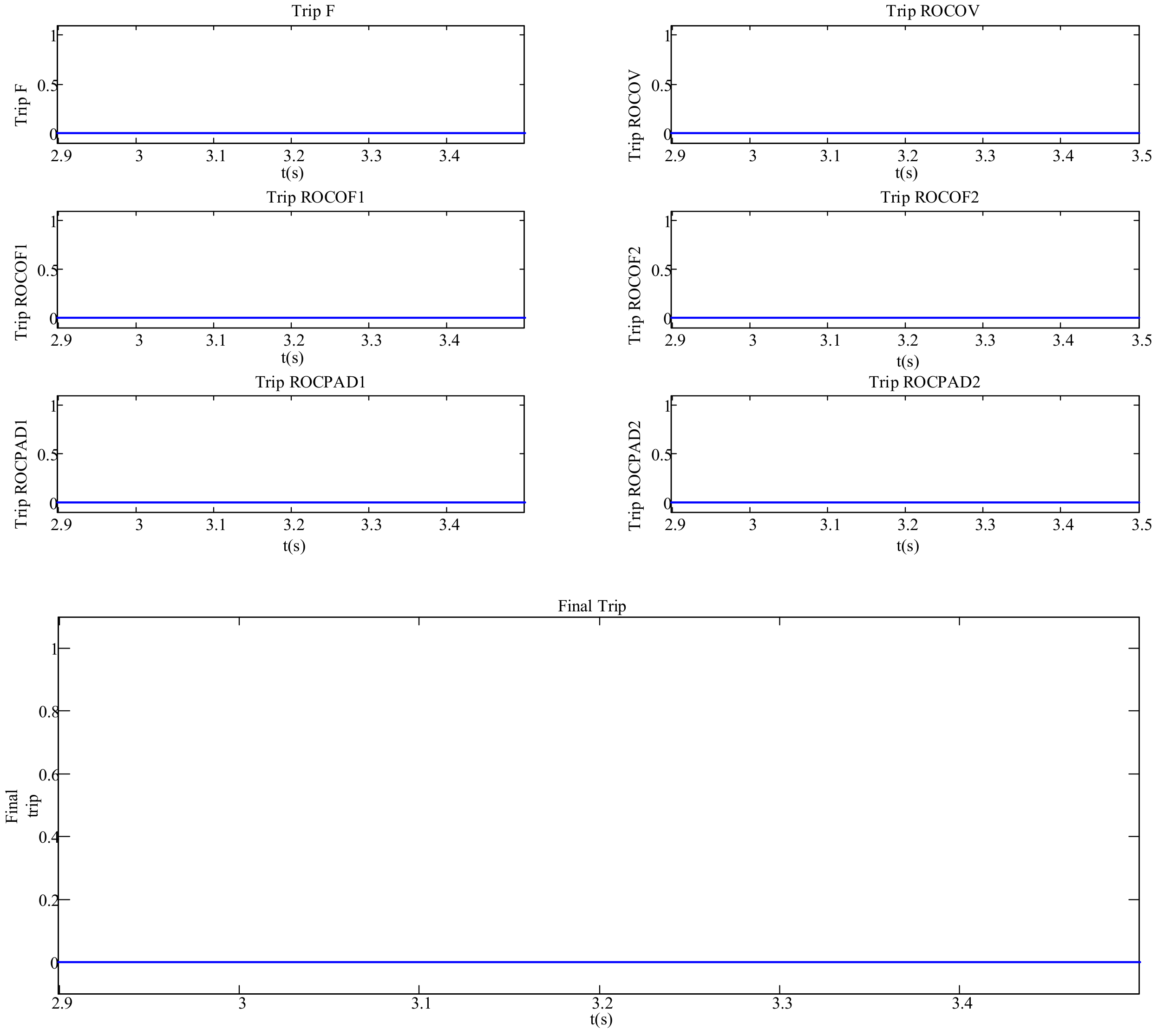
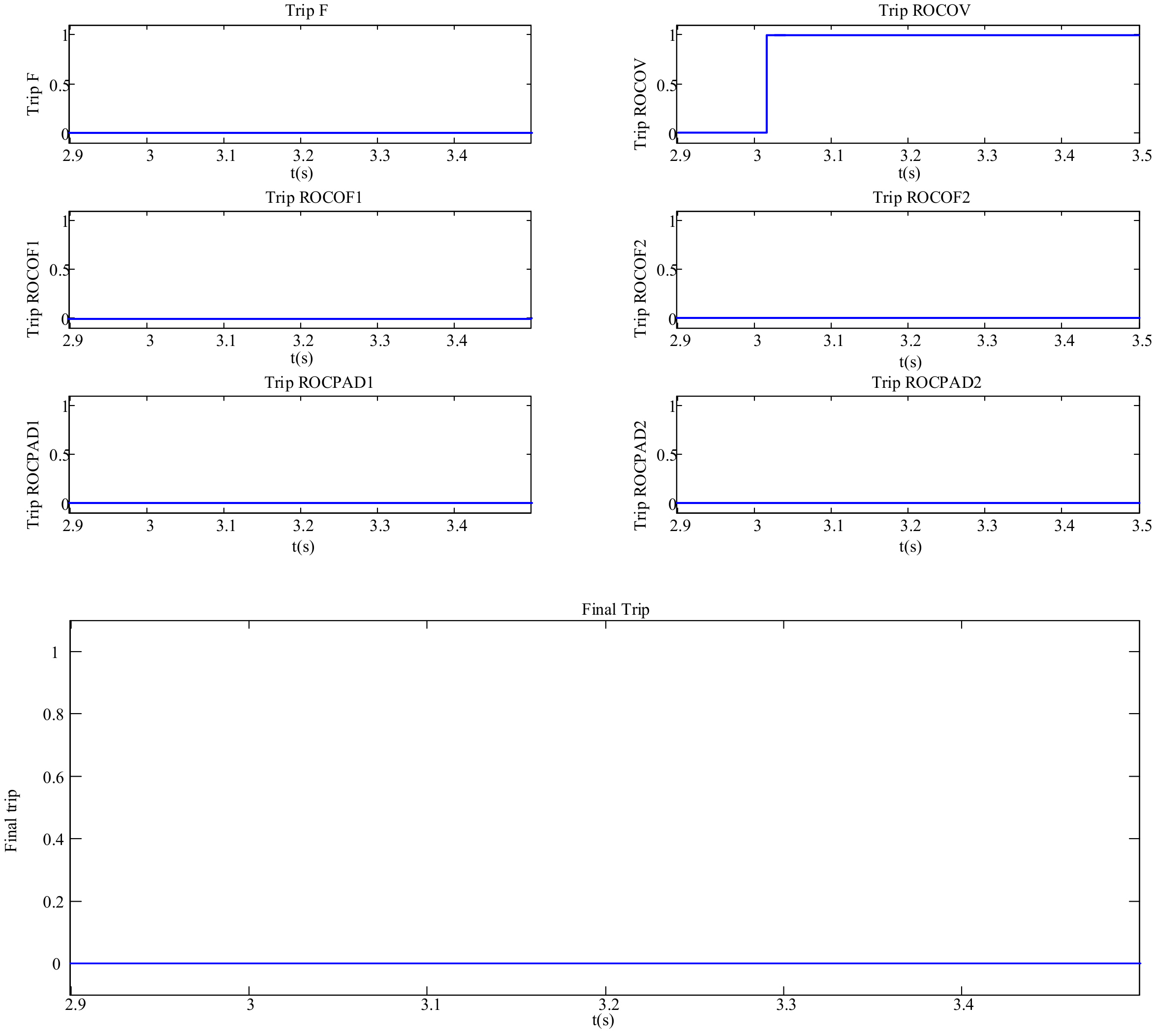
When short circuit faults happen, ROCPAD, ROCOF, and OF/UF relays may have mal-operation. Their operation is limited by the ROCOV relay, and the output of second AND gate becomes zero. The second ROCPAD and ROCOF relays, due to their higher threshold do not have mal-operation during short circuit faults. Finally, the output of the trip signal combination becomes zero, and the proposed algorithm does not operate in short circuit faults properly.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


















