A Context-Aware Oil Debris-Based Health Indicator for Wind Turbine Gearbox Condition Monitoring


Abstract
:1. Introduction
- In the work by the authors of [22], two case studies are analysed: in the first one, physical principles that relate the difference in temperatures with the efficiency, rotational speed and power output are used, and the approach is validated by using the deviation of the temperature with respect to power in order to foresee a failure; in the second one, vibration and particle counter sensors are used and the evolution of the signals is studied before and after the replacement of a bearing. They suggest using cumulative particle counts to better detect failures instead of direct particle creation measurements and to combine various sensors in order to improve confidence in the diagnosis.
- In the work by the authors of [23], they create a health indicator based on the centroids proposed by a Self Organising Map in order to group WTs according to health status using SCADA data. This way operators are given additional information regarding the health state of the WTs, and can plan consequently.
- In the work by the authors of [16], current and vibration analyses are used to diagnose a turbine drive train, they emphasise on the difficulty of using signal processing techniques that are only proven at laboratory scale, and recognise the complexity of calculating the remaining useful life (RUL) and establishing damage/healthy thresholds, especially with a lack of available historical data.
- In the work by the authors of [24],the vibration signature of a sample of healthy wind turbines is shown, most relevant indicators are identified on averaged power spectra and the dependence of amplitudes on the operation is studied. They conclude that the high impact of wind speed on vibration amplitudes has to be taken into account to develop CMS.
- In the work by the authors of [14], the data gathered before and after a planetary gear was changed due to spalling is examined. They integrate temperature, vibration and particle counter signals in order to reduce false alarms, and prove the ability to distinguish healthy and warning states.
- In the work by the authors of [25], they suggest the use of moving averages (of both short and long term trends) of ODM to generate a count rate propagation model. Then, they establish an acceptance threshold based on the equivalent maximum angle of spall which is related to bearing geometry; and, lastly, they estimate remaining useful life (RUL).
2. Data and Methodology
2.1. Wind Farm and Turbines
2.2. Optical Oil Debris Sensor
2.3. Dataset
2.4. Methodology
2.4.1. Exploration and Correlation Analysis
- Pearson correlation: Coefficient used to measure the degree of linear association between two variables, presented in the work by the authors of [31].
- Spearman’s correlation: Nonparametric coefficient that reflects the degree of monotonicity between two variables explained in the work by the authors of [32].
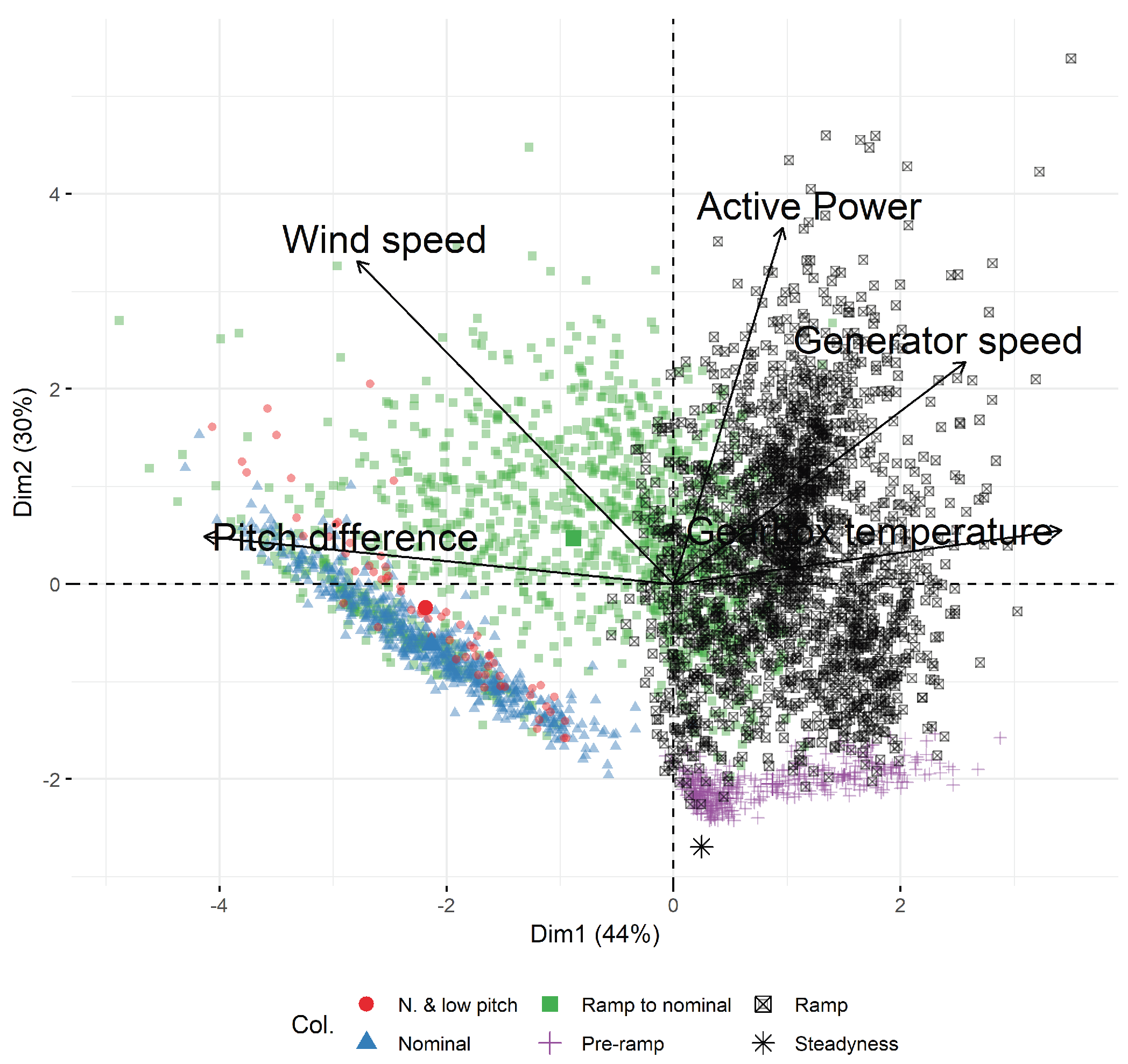
- Principal component analysis (PCA): PCA is a orthogonal transformation that turns a set of variables into a set of linearly uncorrelated variables. This technique is widely used for visualisation purposes in order to reduce multidimensional spaces to lower dimensional representations with the minimum information loss [33].
- Exponential moving average: In contrast to regular moving average where the average of a window of values in taken, this type of moving average is used when latest values are need to have more importance. The implementation used in this work can be found on the work by the authors of [34].
- Local regression (LOESS): This nonparametric method is used on local subsets of data. The implementation is based on the work by the authors of [35].
- Decision trees: Decision trees are machine learning (ML) algorithms used for classification. Their goal is to predict values of a target variable based on the inputs. Trees are built by splitting input variables with criteria that maximise the probability of having instances of certain group in each partition. The trees used in this work used Gini impurity index for partitioning and are implemented in the work by the authors of [36], which is based on the work by the authors of [37].
2.4.2. Comparison of Operation Regions and Health Index (HI) Development
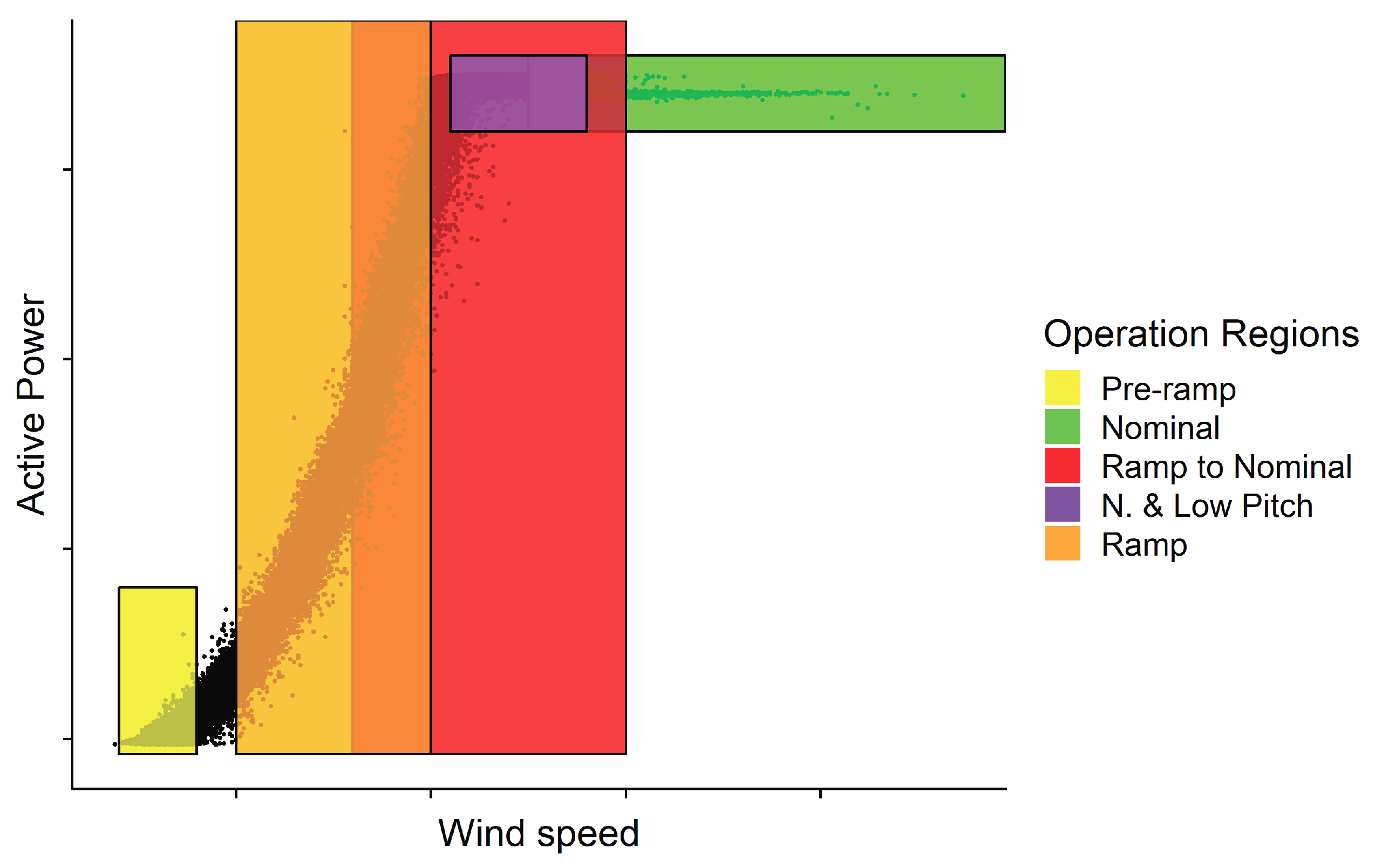
- Operation region (OR) definition: In order to find the optimal instants for taking measurements, several operating regions (OR) are explored. Each operating region is defined by a set of rules/criteria, such as wind speed in range (x m/s, y m/s), active power equals nominal power, etc. The ORs analysed in this work are suggested by experts in the domain, and are depicted in the following Figure 1 with a short explanation added in Table 2.
- Operation states (OS): Instead of considering each time instant individually as a data point with certain associated variable values (pitch angle, active power, ISO.4… etc.) groupings of data points have been studied. These groups or operation states are generated considering the different operation regions previously presented, and correspond to a set of chronologically continuous points over time fulfilling the rules proposed by the OR. Every time the machine works under the criteria of an OR we say it has entered in a new OS related to that OR, that lasts as long as the WT keeps working under the constraints of the OR.
- Operation clustering: With the purpose of analysing the steadiness of the different OR the following procedure was used in order to generate data cluster representing the variability of the operation in each OS according to the different ORs.
- Scale all the variables between 0 and 1 corresponding to the maximum and minimum values of each variable.
- Taking an OR (Example:Nominal) find the respective number of OS occurrences in the dataset , where m is the number of occurrences.
- Create a matrix for each where :where p is equal to the number of sensors considered and is the length of the i-th OS; therefore, these matrices contain the values of the p operation variables along the OS.
- Then, the difference vector of each variable is calculated by OS. This vectors represent the variability of the operation during the OS and give as a result the new matrix D:where , that is, each element of the difference vector is the difference between the measurement in that instant and the following measurement , for each , .
- Then matrix R is computed.R is the result of computing the columnwise quadratic mean of the matrices, and represents the average values of the variability considering both negative and positive values. They are computed in the following way.
- From the R matrix, two metrics are obtained:
- (a)
- Centroid: The average position of the points contained in W. Computed as follows.where for all the average is calculated as follows.
- (b)
- Cluster dispersion: Mean of the variable variance value that represents how disperse the cluster is; it is calculated as follows.Each for is the standard deviation computed in the following way.
This procedure is repeated separately for each WT and OR. Therefore, there are five ORs by three WTs, a total of 15 data clusters. - Operation state and cluster metrics: From the clusters of data and the OS some metrics are calculated that help identifying the most interesting OR. These metrics are as follows.
- -
- Weekly occurrence ratio: Average number of times per week the WT enters in an OS as defined in the OR.
- -
- Steadiness: The euclidean distance from the centroid (or mean point) of a cluster to the total steadiness (no variation) point.
- -
- Dispersion: Indicates how spread the data points within a cluster are. Defined previously in Cluster dispersion.
3. Results
3.1. Exploration and Correlation Analysis
3.2. Comparison of Operation Regions and Health Index (HI) Development
4. Discussion and Future Outlook
Author Contributions
Funding
Conflicts of Interest
References
- Tchakoua, P.; Wamkeue, R.; Ouhrouche, M.; Slaoui-Hasnaoui, F.; Tameghe, T.A.; Ekemb, G. Wind turbine condition monitoring: State-of-the-art review, new trends, and future challenges. Energies 2014, 7, 2595–2630. [Google Scholar] [CrossRef]
- Hameed, Z.; Hong, Y.S.; Cho, Y.M.; Ahn, S.H.; Song, C.K. Condition monitoring and fault detection of wind turbines and related algorithms: A review. Renew. Sustain. Energy Rev. 2009, 13, 1–39. [Google Scholar] [CrossRef]
- Nie, M.; Wang, L. Review of condition monitoring and fault diagnosis technologies for wind turbine gearbox. Procedia CIRP 2013, 11, 287–290. [Google Scholar] [CrossRef]
- Marti-Puig, P.; Blanco, A.M.; Cárdenas, J.J.; Cusidó, J.; Solé-Casals, J. Feature selection algorithms for wind turbine failure prediction. Energies 2019, 12, 453. [Google Scholar] [CrossRef]
- Manwell, J.F.; McGowan, J.G.; Rogers, A.L. Wind Energy Explained: Theory, Design and Application; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2010. [Google Scholar]
- Crabtree, C.J.; Zappalá, D.; Hogg, S.I. Wind energy: UK experiences and offshore operational challenges. Proc. Inst. Mech. Eng. Part A J. Power Energy 2015, 229, 727–746. [Google Scholar] [CrossRef] [Green Version]
- Echavarria, E.; Hahn, B.; van Bussel, G.J.W.; Tomiyama, T. Reliability of Wind Turbine Technology Through Time. J. Sol. Energy Eng. 2008, 130, 031005. [Google Scholar] [CrossRef]
- Su, C.; Yang, Y.; Wang, X.; Hu, Z. Failures analysis of wind turbines: Case study of a Chinese wind farm. In Proceedings of the 2016 Prognostics and System Health Management Conference (PHM-Chengdu 2016), Chengdu, China, 19–21 October 2016. [Google Scholar]
- García Márquez, F.P.; Tobias, A.M.; Pinar Pérez, J.M.; Papaelias, M. Condition monitoring of wind turbines: Techniques and methods. Renew. Energy 2012, 46, 169–178. [Google Scholar] [CrossRef]
- Carroll, J.; McDonald, A.; McMillan, D. Failure rate, repair time and unscheduled O&M cost analysis of offshore wind turbines. Wind Energy 2016. [Google Scholar] [CrossRef]
- Nilsson, J.; Bertling, L. Maintenance management of wind power systems using condition monitoring systems—Life cycle cost analysis for two case studies. IEEE Trans. Energy Convers. 2007, 22, 223–229. [Google Scholar] [CrossRef]
- Pfaffel, S.; Faulstich, S.; Rohrig, K. Performance and reliability of wind turbines: A review. Energies 2017, 10, 1904. [Google Scholar] [CrossRef]
- Hahn, B.; Durstewitz, M.; Rohrig, K. Reliability of Wind Turbine–Experiences of 15 years with 1500 WTs. In Wind Energy; Peinke, J., Schaumann, P., Barth, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Koltsidopoulos Papatzimos, A.; Dawood, T.; Thies, P.R. Data Insights from an Offshore Wind Turbine Gearbox Replacement. J. Phys. Conf. Ser. 2018, 1104. [Google Scholar] [CrossRef]
- Kattelus, J.; Miettinen, J.; Lehtovaara, A. Detection of gear pitting failure progression with on-line particle monitoring. Tribiol. Int. 2018, 118, 458–464. [Google Scholar] [CrossRef]
- Artigao, E.; Koukoura, S.; Honrubia-Escribano, A.; Carroll, J.; McDonald, A.; Gómez-Lázaro, E. Current signature and vibration analyses to diagnose an in-service wind turbine drive train. Energies 2018, 11, 960. [Google Scholar] [CrossRef]
- Gonzalez, E.; Stephen, B.; Infield, D.; Melero, J.J. Using high-frequency SCADA data for wind turbine performance monitoring: A sensitivity study. Renew. Energy 2019, 131, 841–853. [Google Scholar] [CrossRef]
- Elosegui, U.; Egana, I.; Ulazia, A.; Ibarra-Berastegi, G. Pitch angle misalignment correction based on benchmarking and laser scanner measurement in wind farms. Energies 2018, 11, 3357. [Google Scholar] [CrossRef]
- Astolfi, D. A Study of the Impact of Pitch Misalignment on Wind Turbine Performance. Machines 2019, 7, 8. [Google Scholar] [CrossRef]
- Rabanal, A.; Ulazia, A.; Ibarra-Berastegi, G.; Sáenz, J.; Elosegui, U. MIDAS: A Benchmarking Multi-Criteria Method for the Identification of Defective Anemometers in Wind Farms. Energies 2019, 12, 28. [Google Scholar] [CrossRef]
- Tautz-Weinert, J.; Watson, S.J. Using SCADA data for wind turbine condition monitoring—A review. IET Renew. Power Gener. 2017, 11, 382–394. [Google Scholar] [CrossRef]
- Feng, Y.; Qiu, Y.; Crabtree, C.J.; Long, H.; Tavner, P.J. Monitoring wind turbine gearboxes. Wind Energy 2013, 16, 728–740. [Google Scholar] [CrossRef]
- Blanco, M.A.; Gibert, K.; Marti-Puig, P.; Cusidó, J.; Solé-Casals, J. Identifying health status of wind turbines by using self organizing maps and interpretation-oriented post-processing tools. Energies 2018, 11, 723. [Google Scholar] [CrossRef]
- Escaler, X.; Mebarki, T. Full-Scale Wind Turbine Vibration Signature Analysis. Machines 2018, 6, 63. [Google Scholar] [CrossRef]
- Dupuis, R. Application of Oil Debris Monitoring For Wind Turbine Gearbox Prognostics and Health Management. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, Portland, OR, USA, 10–16 October 2010. [Google Scholar]
- Sheng, S. Monitoring of Wind Turbine Gearbox Condition through Oil and Wear Debris Analysis: A Full-Scale Testing Perspective. Tribol. Trans. 2016. [Google Scholar] [CrossRef]
- Cuadrat Prats, J. El clima de Aragón. Geografía Física de Aragón. Aspectos Generales y Temáticos; Asociación de Geógrafos Español: Murcia, Spain, 2004; pp. 15–26. [Google Scholar]
- Mabe, J.; Zubia, J.; Gorritxategi, E. Photonic low cost micro-sensor for in-line wear particle detection in flowing lube oils. Sensors 2017, 17, 586. [Google Scholar] [CrossRef] [PubMed]
- Lopez, P.; Mabe, J.; Miró, G.; Etxeberria, L. Low cost photonic sensor for in-line oil quality monitoring: Methodological development process towards uncertainty mitigation. Sensors 2018, 18, 2015. [Google Scholar] [CrossRef] [PubMed]
- British Standard. BS ISO 4406:1999 Hydraulic Fluid Power—Fluids—Method for Coding the Level of Contamination by Solid Particles; International Organization for Standardization: Geneva, Switzerland, 1999. [Google Scholar] [CrossRef]
- Pearson, K. VII. Note on regression and inheritance in the case of two parents. Proc. R. Soc. Lond. 1895, 58, 240–242. [Google Scholar]
- Spearman, C. The proof and measurement of association between two things. Am. J. Psychol. 1904, 15, 72–101. [Google Scholar] [CrossRef]
- Hotelling, H. Analysis of a complex of statistical variables into principal components. J. Educ. Psychol. 1933, 24, 417–441. [Google Scholar] [CrossRef]
- Ulrich, J. TTR: Technical Trading Rules. R Package Version 0.23-4. 2018. Available online: https://cran.r-project.org/web/packages/TTR/TTR.pdf (accessed on 15 July 2019).
- Cleveland, W.; Grosse, E.; Shyu, W. Local regression models. In Statistical Models in S; Chambers, J.M., Hastie, T.J., Eds.; Software Pacific Grove: Wadsworth, OH, USA, 1992; pp. 309–376. [Google Scholar]
- Therneau, T.; Atkinson, B. rpart: Recursive Partitioning and Regression Trees. R Package Version 4.1-13. 2018. Available online: https://cran.r-project.org/web/packages/rpart/vignettes/longintro.pdf (accessed on 15 July 2019).
- Breiman, L.; Friedman, J.; Olshen, R.; Stone, C. Classification and Regression Trees; Wadsworth Int. Group: Wadsworth, OH, USA, 1984; Volume 37, pp. 237–251. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | System | Units of Measurement |
|---|---|---|
| SCADA | Pitch angle | |
| Gearbox temperature | C | |
| Wind speed | m/s | |
| Generator speed | rpm | |
| Active power | kW | |
| Oil debris sensor | ISO.4 | scale |
| ISO.6 | scale | |
| ISO.14 | scale |
| Operating Region | Characteristics |
|---|---|
| Nominal | Stable power generation. Varying pitch |
| N. & low pitch | Similar to nominal, but more restrictive and not including high wind speeds, delimited using pitch values. |
| Ramp to nominal | Ranges from about the middle of the power curve to beginning of nominal operation. |
| Ramp | Values taken only during the power ramp. |
| Pre-ramp | Values taken before the generator speed ramp starts. |
| Turbine | OR | >5 | >10 | >15 | >30 | >45 |
|---|---|---|---|---|---|---|
| WT 1 | N. & pitch | 179 | 64 | 30 | 8 | 3 |
| WT 1 | Nominal | 1073 | 532 | 357 | 189 | 113 |
| WT 1 | Ramp-to-nominal | 2204 | 1159 | 794 | 417 | 294 |
| WT 1 | Pre-ramp | 1119 | 367 | 155 | 25 | 9 |
| WT 1 | Ramp | 3451 | 1906 | 1380 | 757 | 481 |
| WT 2 | N. & pitch | 44 | 15 | 6 | 2 | 2 |
| WT 2 | Nominal | 985 | 507 | 339 | 183 | 128 |
| WT 2 | Ramp-to-nominal | 1833 | 1057 | 758 | 427 | 297 |
| WT 2 | Pre-ramp | 1040 | 325 | 140 | 29 | 5 |
| WT 2 | Ramp | 3316 | 1893 | 1340 | 744 | 502 |
| WT 3 | N. & pitch | 262 | 103 | 50 | 21 | 11 |
| WT 3 | Nominal | 1144 | 600 | 410 | 206 | 127 |
| WT 3 | Ramp-to-nominal | 2191 | 1159 | 820 | 453 | 320 |
| WT 3 | Pre-ramp | 1299 | 403 | 174 | 19 | 3 |
| WT 3 | Ramp | 3282 | 1840 | 1339 | 754 | 511 |
| N. & Pitch | Nominal | Ramp to Nominal | Pre-Ramp | Ramp | |
|---|---|---|---|---|---|
| WT 1 | |||||
| WT 2 | |||||
| WT 3 | |||||
| Average |
| N. & Pitch | Nominal | Ramp to Nominal | Pre-Ramp | Ramp | |
|---|---|---|---|---|---|
| WT 1 | |||||
| WT 2 | |||||
| WT 3 | |||||
| Average |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
López de Calle, K.; Ferreiro, S.; Roldán-Paraponiaris, C.; Ulazia, A. A Context-Aware Oil Debris-Based Health Indicator for Wind Turbine Gearbox Condition Monitoring. Energies 2019, 12, 3373. https://doi.org/10.3390/en12173373
López de Calle K, Ferreiro S, Roldán-Paraponiaris C, Ulazia A. A Context-Aware Oil Debris-Based Health Indicator for Wind Turbine Gearbox Condition Monitoring. Energies. 2019; 12(17):3373. https://doi.org/10.3390/en12173373
Chicago/Turabian StyleLópez de Calle, Kerman, Susana Ferreiro, Constantino Roldán-Paraponiaris, and Alain Ulazia. 2019. "A Context-Aware Oil Debris-Based Health Indicator for Wind Turbine Gearbox Condition Monitoring" Energies 12, no. 17: 3373. https://doi.org/10.3390/en12173373
APA StyleLópez de Calle, K., Ferreiro, S., Roldán-Paraponiaris, C., & Ulazia, A. (2019). A Context-Aware Oil Debris-Based Health Indicator for Wind Turbine Gearbox Condition Monitoring. Energies, 12(17), 3373. https://doi.org/10.3390/en12173373