RSSI-Power-Based Direction of Arrival Estimation of Partial Discharges in Substations




Abstract
:1. Introduction
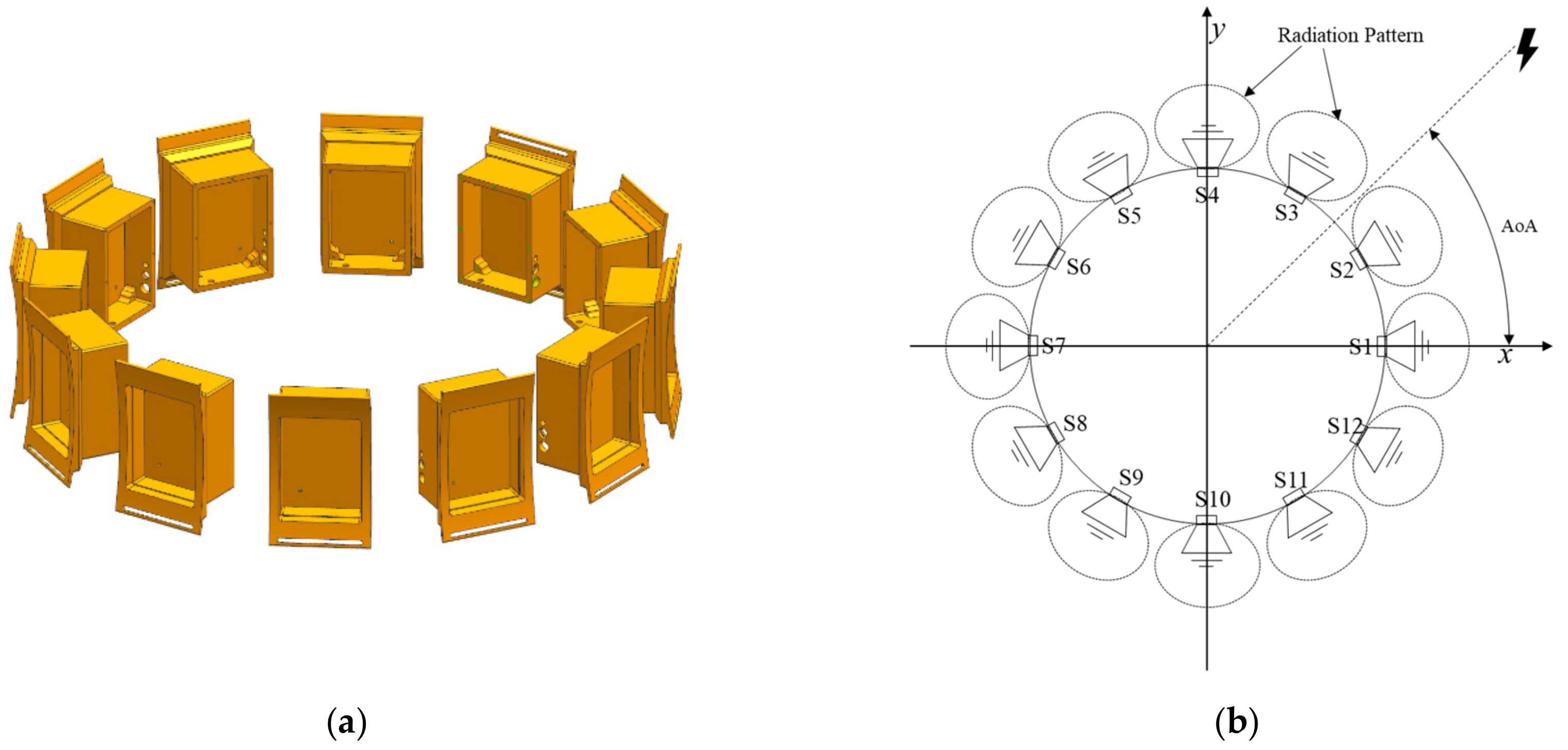
2. Fundamentals of DoA Estimation System
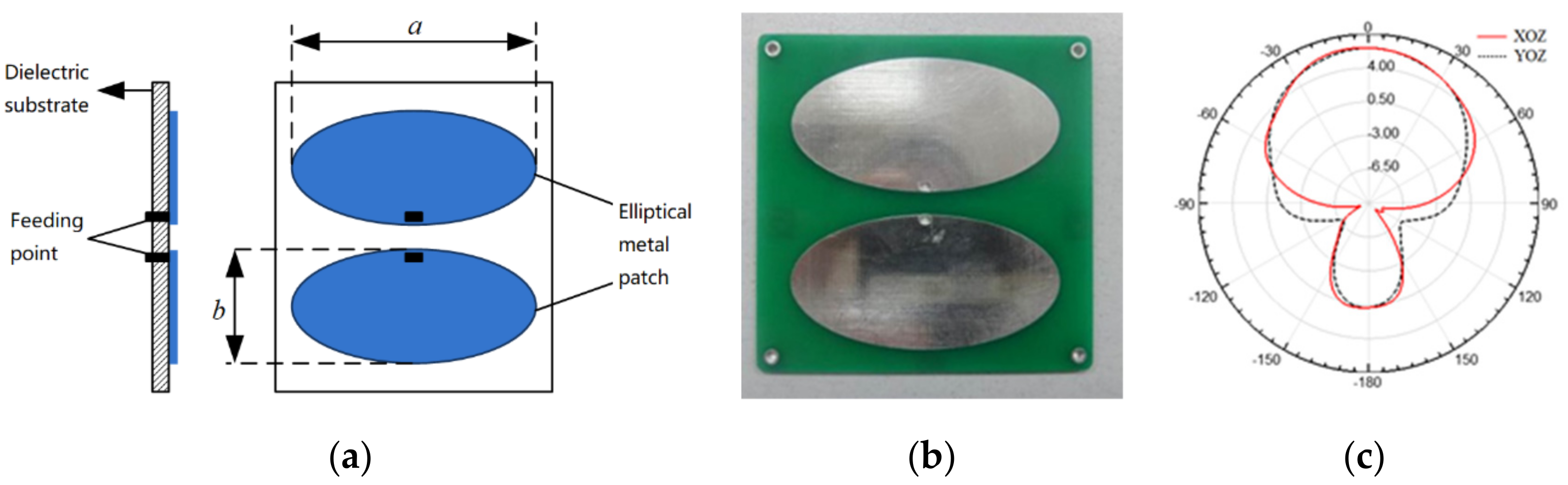
2.1. Wireless UHF Sensor
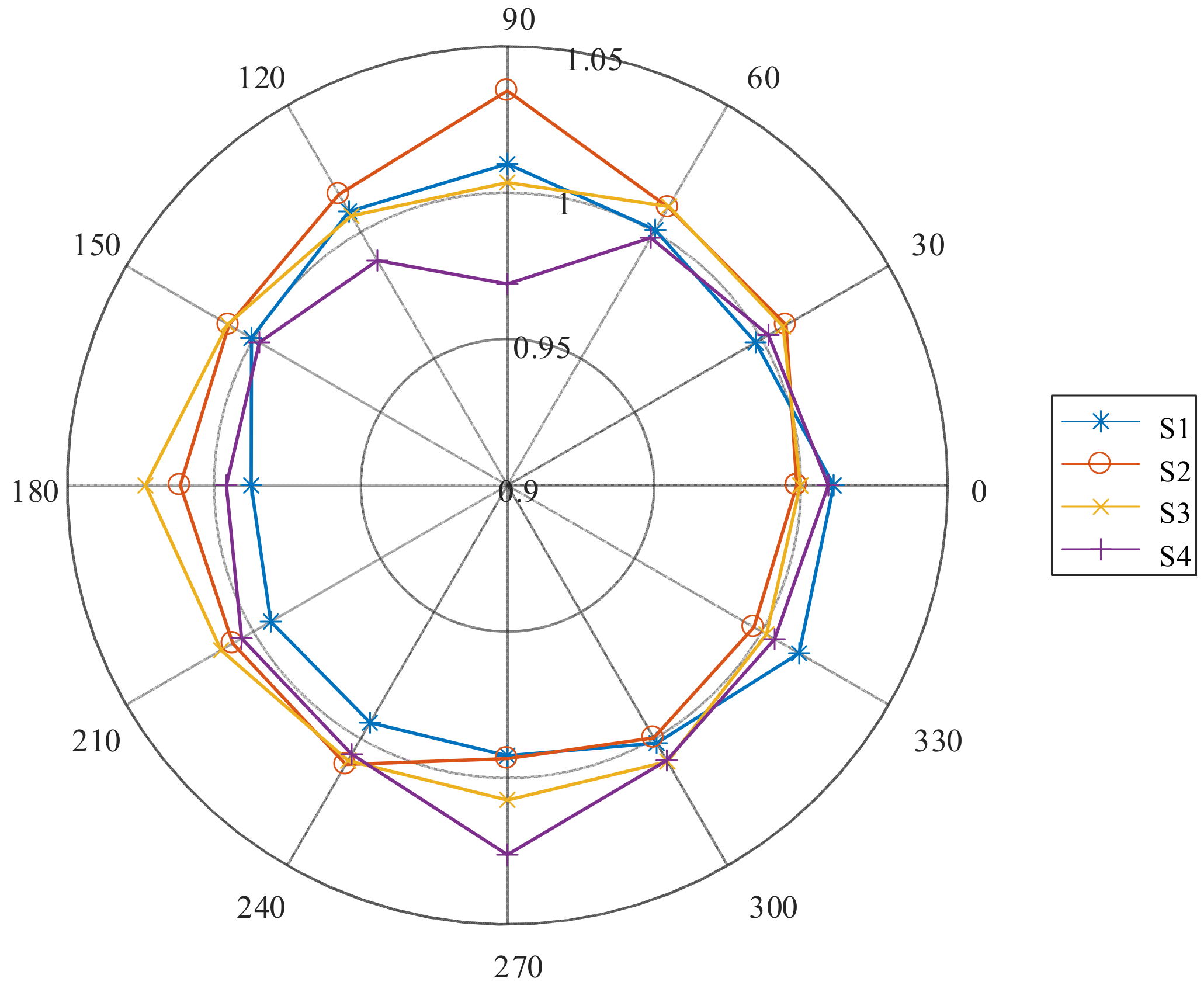
2.2. Preliminary Test of Radiation Pattern
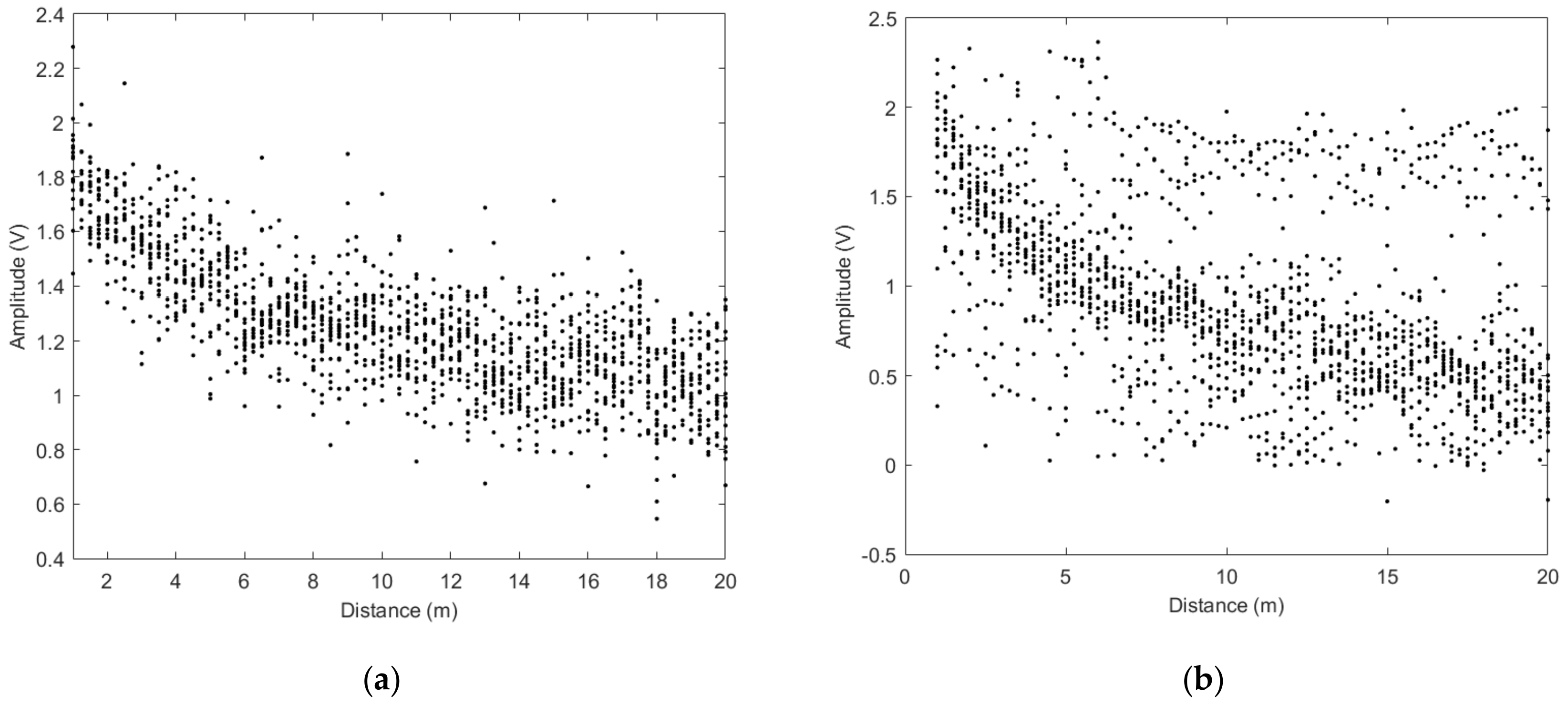
2.3. LOS and NLOS Consideration
3. Methodology of RSSI-Power-Based PD DOA in Substations
3.1. Gaussian Mxiture Model for Noise Suppression
3.2. Calibration and Normalization
3.3. LOS Identification by GPC
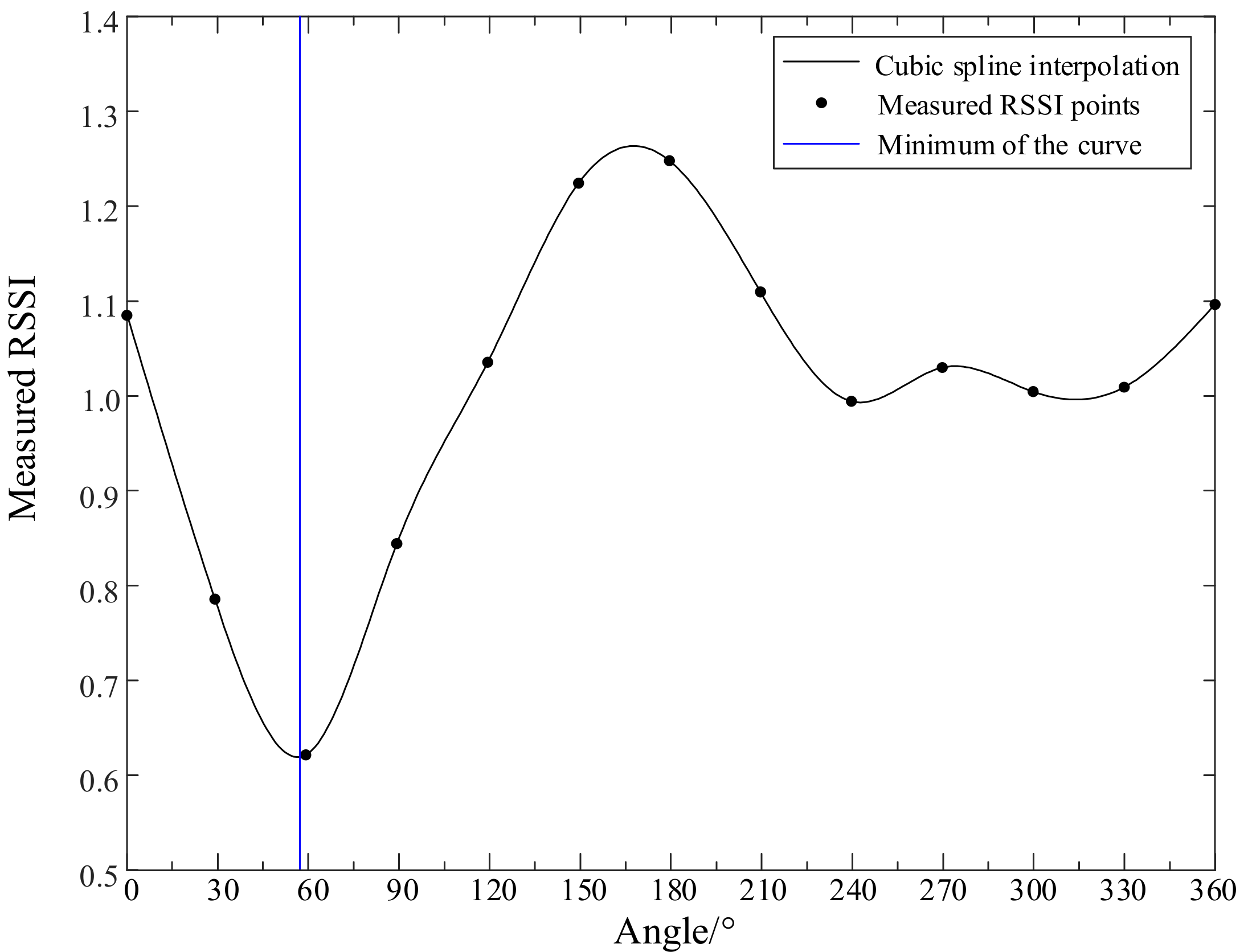
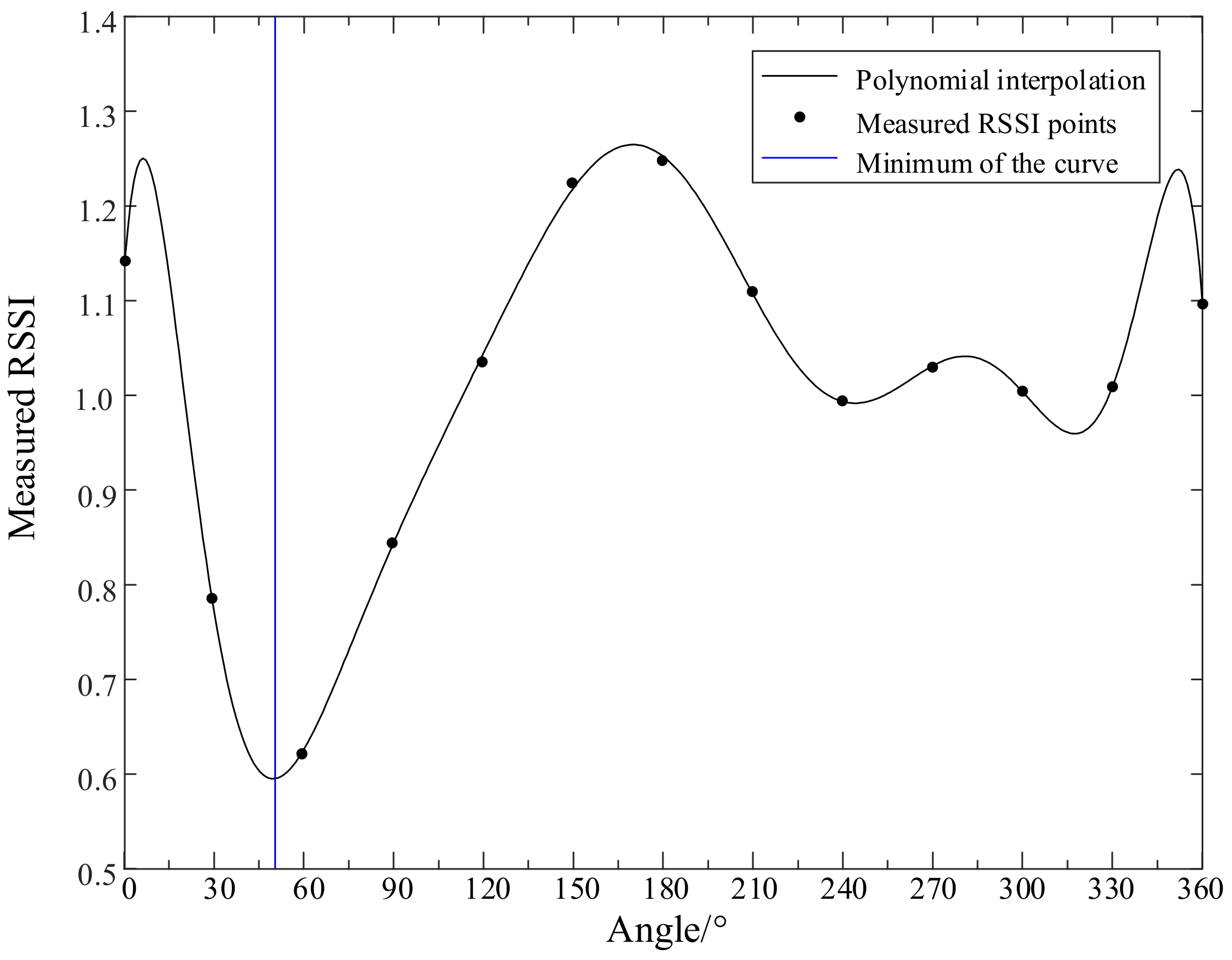
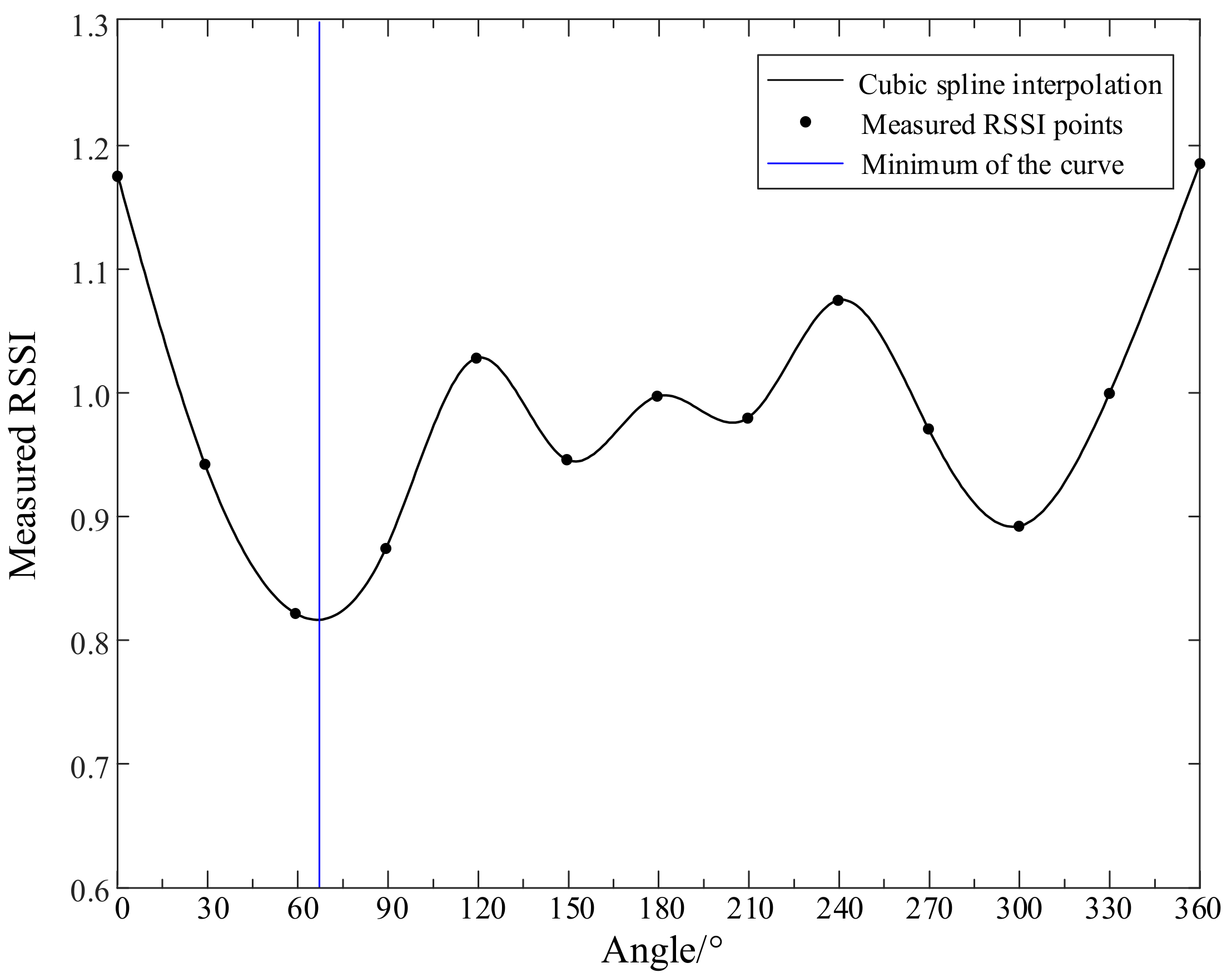
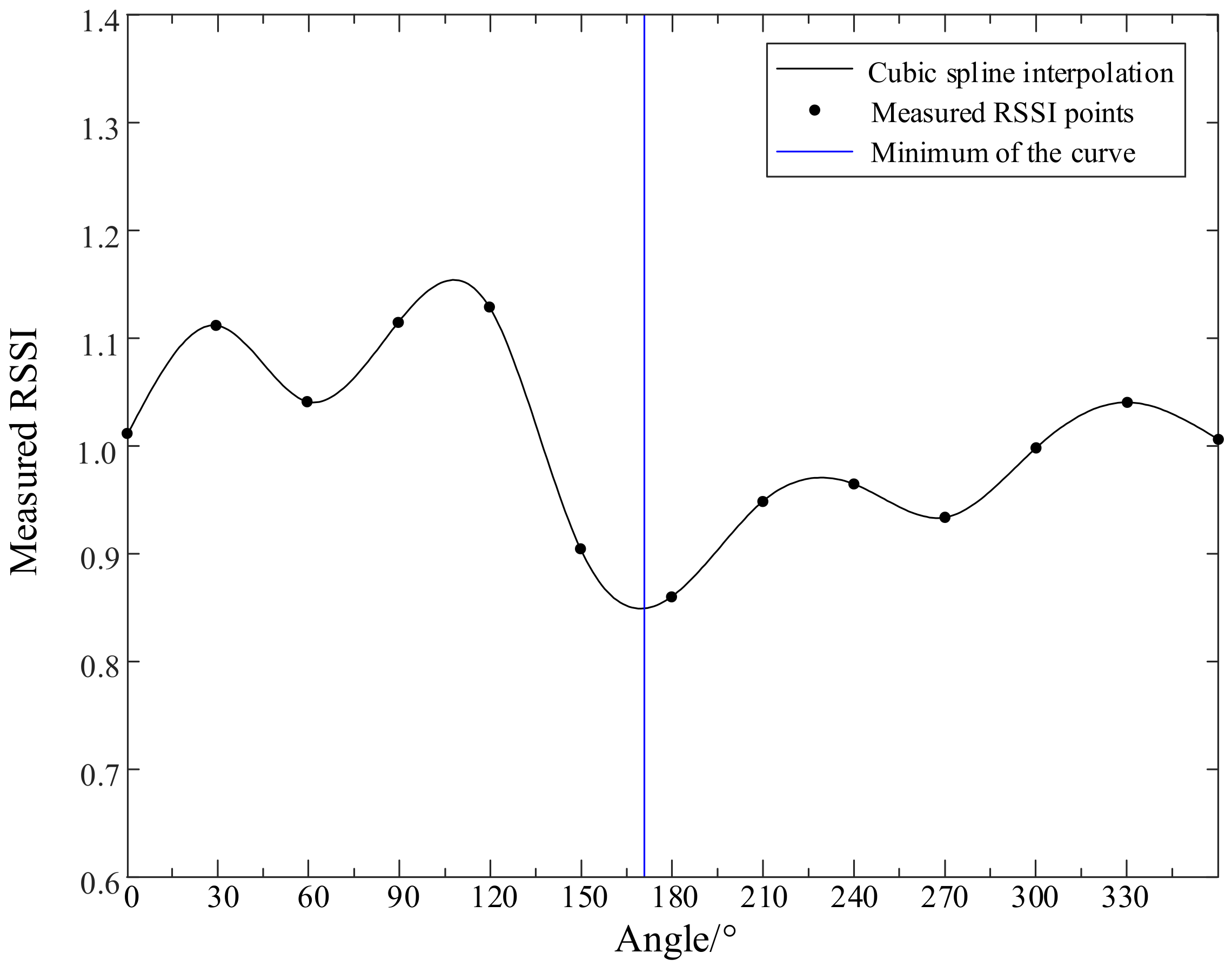
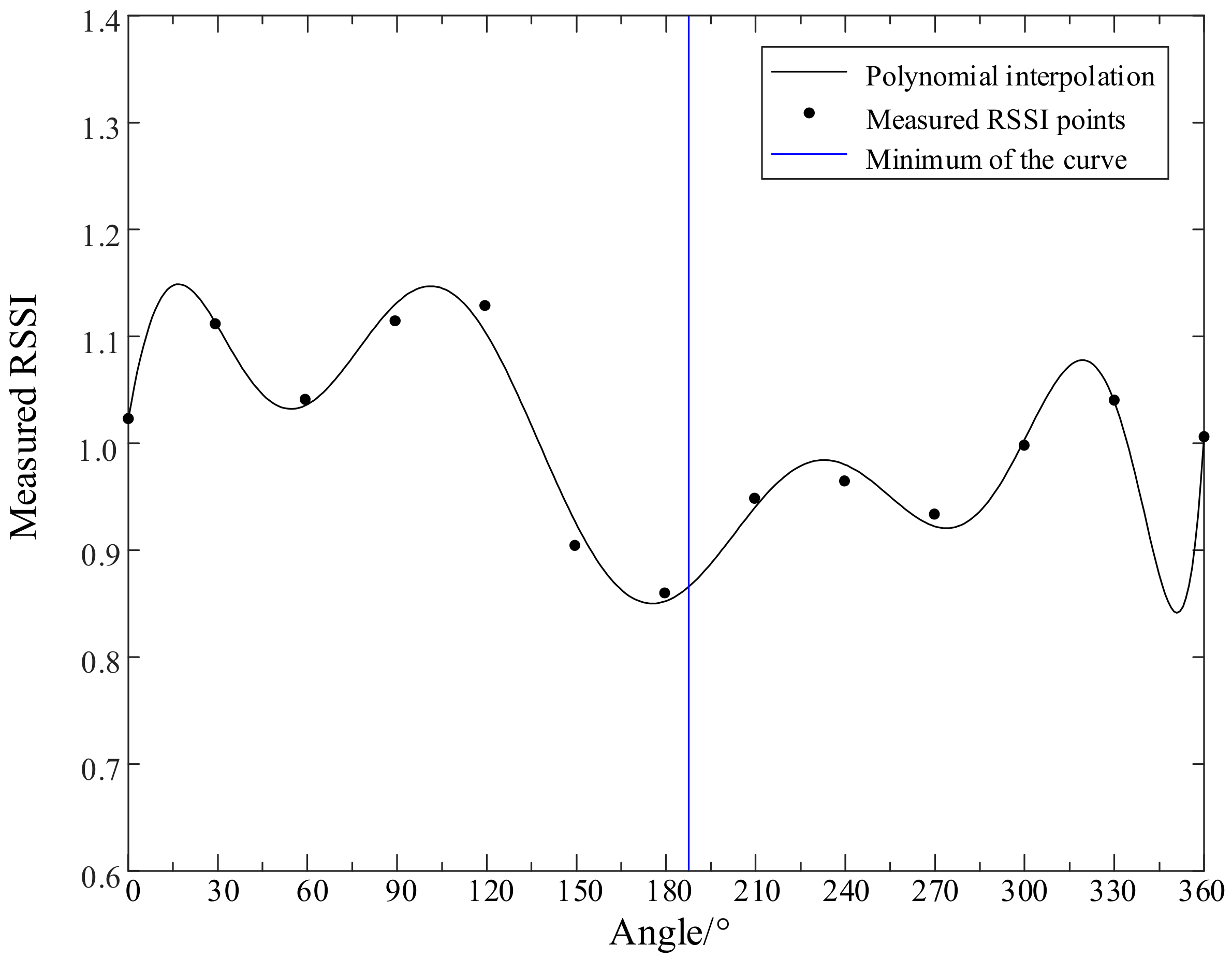
3.4. Interpolation
3.5. Framework of RSSI-Power-Based DoA of PD
4. Experimental Verification
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Stone, G.C. Partial discharge diagnostics and electrical equipment insulation condition assessment. IEEE Trans. Dielectr. Electr. Insul. 2005, 12, 891–904. [Google Scholar] [CrossRef]
- Portugues, I.E.; Moore, P.J.; Glover, I.A.; Johnstone, C.; McKosky, R.H.; Goff, M.B.; van der Zel, L. RF-based partial discharge early warning system for air-insulated substations. IEEE Trans. Power Deliv. 2009, 24, 20–29. [Google Scholar] [CrossRef]
- Markalous, S.M.; Tenbohlen, S.; Feser, K. Detection and location of partial discharges in power transformers using acoustic and electromagnetic signals. IEEE Trans. Dielectr. Electr. Insul. 2008, 15, 1576–1583. [Google Scholar] [CrossRef]
- Arefifar, S.A.; Mohamed, Y.A.R.I.; El-Fouly, T.H. Comprehensive operational planning framework for selfhealing control actions in smart distribution grids. IEEE Trans. Power Syst. 2013, 28, 4192–4200. [Google Scholar] [CrossRef]
- Wang, D.; Du, L.; Yao, C.; Yan, J. UHF PD measurement system with scanning and comparing method. IEEE Trans. Dielectr. Electr. Insul. 2018, 25, 199–206. [Google Scholar] [CrossRef]
- Tian, Y.; Kawada, M. Simulation on locating partial discharge source occurring on distribution line by estimating the DOA of emitted EM waves. IEEJ Trans. Electr. Electron. Eng. 2012, 7, S6–S13. [Google Scholar] [CrossRef]
- Portugues, I.E.; Moore, P.J. Study of propagation effects of wideband radiated RF signals from PD activity. In Proceedings of the 2006 IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006. [Google Scholar]
- Sinaga, H.H.; Phung, B.T.; Blackburn, T.R. Partial discharge localization in transformers using UHF detection method. IEEE Trans. Dielectr. Electr. Insul. 2012, 19, 1891–1900. [Google Scholar] [CrossRef]
- Siegel, M.; Beltle, M.; Tenbohlen, S.; Coenen, S. Application of UHF sensors for PD measurement at power transformers. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 331–339. [Google Scholar] [CrossRef]
- Hou, H.; Sheng, G.; Li, S.; Jiang, X. A Novel Algorithm for Separating Multiple PD Sources in a Substation Based on Spectrum Reconstruction of UHF Signals. IEEE Trans. Power Deliv. 2015, 30, 809–817. [Google Scholar] [CrossRef]
- Moore, P.J.; Portugues, I.E.; Glover, I.A. Radiometric Location of Partial Discharge Sources on Energized High-Voltage Plant. IEEE Trans. Power Deliv. 2005, 20, 2264–2272. [Google Scholar] [CrossRef]
- Passafiume, M.; Maddio, S.; Cidronali, A.; Manes, G. Music algorithm for RSSI-based DoA estimation on standard IEEE 802.11/802.15. x systems. World Sci. Eng. Acad. Soc. Trans. Signal Process 2015, 11, 58–68. [Google Scholar]
- Zhang, Y.; Upton, D.; Jaber, A.; Ahmed, H.; Saeed, B.; Mather, P.; Lazaridis, P.; Mopty, A.; Tachtatzis, C.; Atkinson, R.; et al. Radiometric wireless sensor network monitoring of partial discharge sources in electrical substation. Int. J. Distrib. Sens. Netw. 2015, 11, 1–9. [Google Scholar] [CrossRef]
- Li, Z.; Luo, L.; Sheng, G.; Liu, Y.; Jiang, X. UHF partial discharge localisation method in substation based on dimension-reduced RSSI fingerprint. IET Gener. Transm. Distrib. 2018, 12, 398–405. [Google Scholar] [CrossRef]
- Iorkyase, E.T.; Tachtatzis, C.; Atkinson, R.C.; Glover, I.A. Localisation of partial discharge sources using radio fingerprinting technique. In Proceedings of the 2015 Loughborough Antennas & Propagation Conference (LAPC), Loughborough, UK, 2–3 November 2015. [Google Scholar]
- Li, Z.; Luo, L.; Liu, Y.; Sheng, G.; Jiang, X.P. UHF partial discharge localization algorithm based on compressed sensing. IEEE Trans. Dielectr. Electr. Insul. 2018, 25, 21–29. [Google Scholar] [CrossRef]
- DITO ESD SIMULATOR Data Sheet. Available online: www.emtest.com/products/product/135120100000010183.pdf (accessed on 21 July 2019).
- Xu, J.; Liu, W.; Lang, F.; Zhang, Y.; Wang, C. Distance measurement model based on RSSI in WSN. Wirel. Sens. Netw. 2010, 2, 606–611. [Google Scholar] [CrossRef]
- Biernacki, C.; Celeux, G.; Govaert, G. Assessing a mixture model for clustering with the integrated completed likelihood. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 719–725. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Nickisch, H. Gaussian processes for machine learning (GPML) toolbox. J. Mach. Learn. Res. 2010, 11, 3011–3015. [Google Scholar]
- Neal, R.M. Bayesian Learning for Neural Networks; Springer Science & Business Media: New York, NY, USA, 1996. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Azimuth/(°) | Distance/(m) | Preprocess | Interpolation | Result/(°) | Error/(°) |
|---|---|---|---|---|---|
| 240 | 5 | With GPC | Cubic spline | 240.6 | 0.6 |
| Polynomial | 229.0 | 11.0 | |||
| Without GPC | Cubic spline | 240.7 | 0.7 | ||
| Polynomial | 229.3 | 10.7 | |||
| 240 | 10 | With GPC | Cubic spline | 235.4 | 4.6 |
| Polynomial | 230.0 | 10.0 | |||
| Without GPC | Cubic spline | 234.5 | 5.5 | ||
| Polynomial | 228.7 | 11.3 | |||
| 360 | 10 | With GPC | Cubic spline | 2.7 | 2.7 |
| Polynomial | 10.0 | 10.0 | |||
| Without GPC | Cubic spline | 3.2 | 3.2 | ||
| Polynomial | 10.3 | 10.3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, F.; Luo, L.; Jia, T.; Sun, A.; Sheng, G.; Jiang, X. RSSI-Power-Based Direction of Arrival Estimation of Partial Discharges in Substations. Energies 2019, 12, 3450. https://doi.org/10.3390/en12183450
Wu F, Luo L, Jia T, Sun A, Sheng G, Jiang X. RSSI-Power-Based Direction of Arrival Estimation of Partial Discharges in Substations. Energies. 2019; 12(18):3450. https://doi.org/10.3390/en12183450
Chicago/Turabian StyleWu, Fan, Lingen Luo, Tingbo Jia, Anqing Sun, Gehao Sheng, and Xiuchen Jiang. 2019. "RSSI-Power-Based Direction of Arrival Estimation of Partial Discharges in Substations" Energies 12, no. 18: 3450. https://doi.org/10.3390/en12183450
APA StyleWu, F., Luo, L., Jia, T., Sun, A., Sheng, G., & Jiang, X. (2019). RSSI-Power-Based Direction of Arrival Estimation of Partial Discharges in Substations. Energies, 12(18), 3450. https://doi.org/10.3390/en12183450