1. Introduction
An array composed of multiple wave-energy convertes (WECs) enables wave-energy harvesting at multiple ocean wave points and cooperative control during power generation. Therefore, the WEC array has higher acquisition efficiency and higher power output quality than a single WEC. The array of WECs is not only required to strictly respond to the total power supply requirements of the load, but also to dispatch adequate power to each WEC according to the current conditions of wave-energy harvesting. However, the prediction of the ocean wave power conditions is challenging because of intermittence and random wave motion [
1]. Consequently, it is challenging to design a coordinated control algorithm for an array of WECs. Since both the power demand of the load and the conditions of the ocean wave change in real time, it is necessary to eliminate the influence of these factors on the quality of power supply of the WEC array by the designed controller. Additionally, there has been little work reported on the coordinated control that takes into account both power requirement response and energy capture constraints of each WEC.
To improve wave-energy extraction, many researchers have focused on studying the maximum power point tracking (MPPT) control strategy of WECs under real-time ocean conditions. In [
2], a hill-climbing MPPT method was applied to design the control strategy for a direct-drive WEC, and the steady-state performance of the MPPT was improved through a window function-based mean value filtering. An MPPT experimental device was designed to demonstrate the feasibility of the MPPT technique for ocean wave-energy conversion [
3]. A speed sensorless control method of the linear permanent magnet synchronous generator (LPMSG) was introduced to extract the maximum power from the ocean wave, and the translator velocity was estimated by the unscented Kalman filter [
4]. The MPPT was considered to be an optimal controller which was implemented by a model predictive control (MPC), to guarantee feasible optimal solutions and safe operation in [
5]. Because the optimal harvesting condition of a WEC is a region defined by the amount of capture width information available, the MPPT control was modified to be the maximum capture width tracking (MCWT) control to ensure robust during the rapidly changing in ocean wave in [
6]. In [
7], a robust model-free collaborative learning approach was presented for a latchable WEC array. Furthermore, the machine-learning algorithm with a shallow artificial neural network (ANN) was applied to obtain the optimal latching times and absorb more power [
8]. However, the papers mainly concentrated on the MPPT control problem of WEC for maximum extraction of wave energy. Local power smoothing and energy management are necessary to deal with the stationarity of voltage and current output, as well as the tracking performance of real-time load power demand for each WEC [
9]. An energy management law was adopted to smooth the power fluctuation to guarantee a limited voltage range [
10]. In [
11], a power smoothing strategy based on a voltage controller was proposed to manage the supercapacitors’ state of charge and generate a power profile capable of smoothing the varying power of renewable sources.
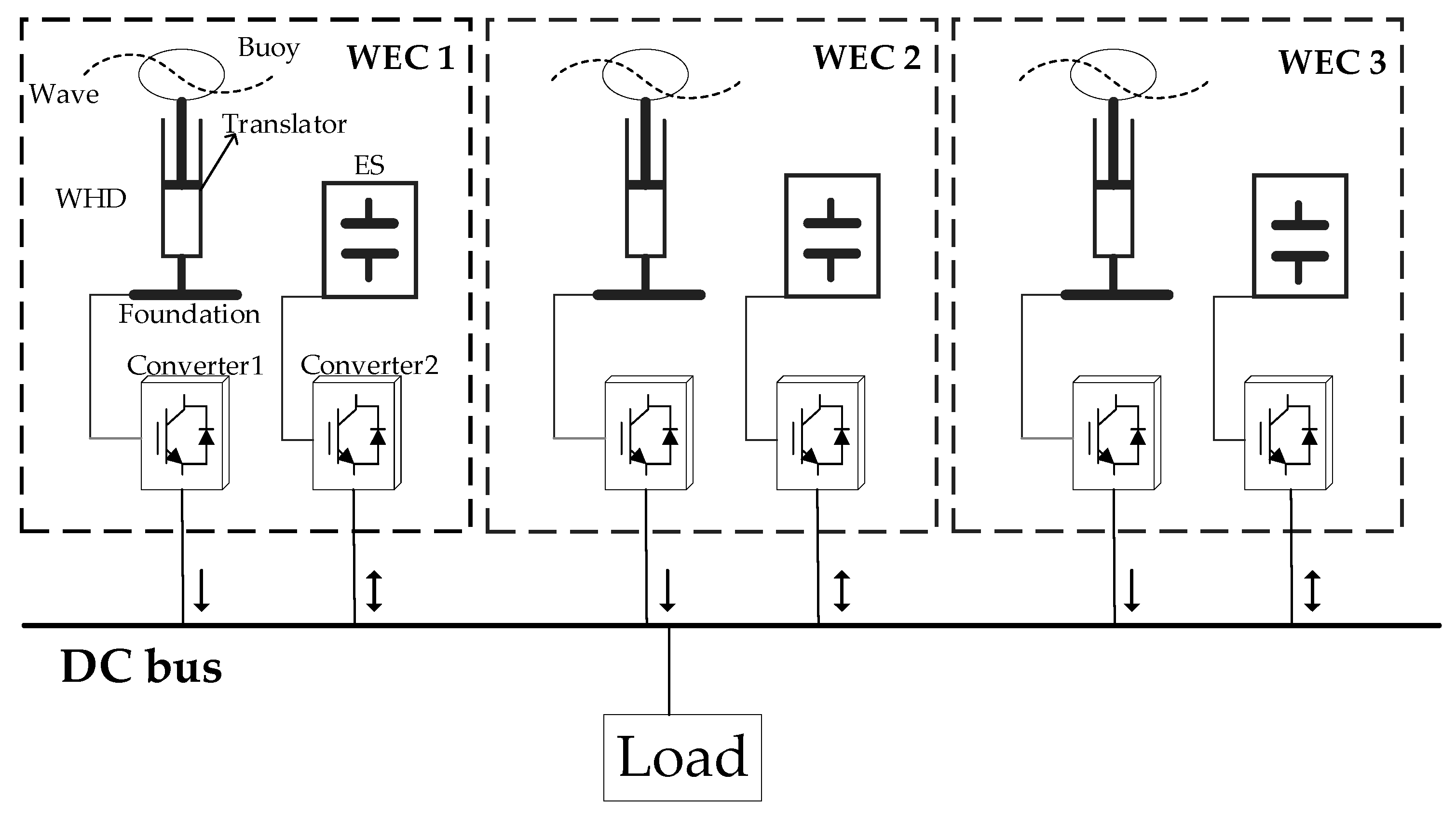
An array of WECs was connected to the bus to supply the electric power for the target load, and the whole system formed a DC microgrid. Hierarchical control methods are usually applied for the microgrid (MG) to satisfy the power requirement of the load [
12]. The controller on the primary level regulates DC bus voltage and share current between sources in the MG, and the controller on the secondary level is a consensus-based distributed voltage regulator for power flow dispatch [
13]. The consensus algorithm is not only able to ensure reactive power-sharing of the MG, but also restore the frequency and voltage [
14]. The methods were also defined as a multiagent system (MAS) framework in which each participant in MG is assigned to an agent connected with its adjacent agents [
15]. To ensure better system reliability in a hybrid power source, a distributed energy management solution based on the paradigm of MASs was proposed through a bottom-up approach [
16]. However, the MAS framework only performed the coordinated control of the participant of MG rather than the tracking control of the total power requirement [
17].
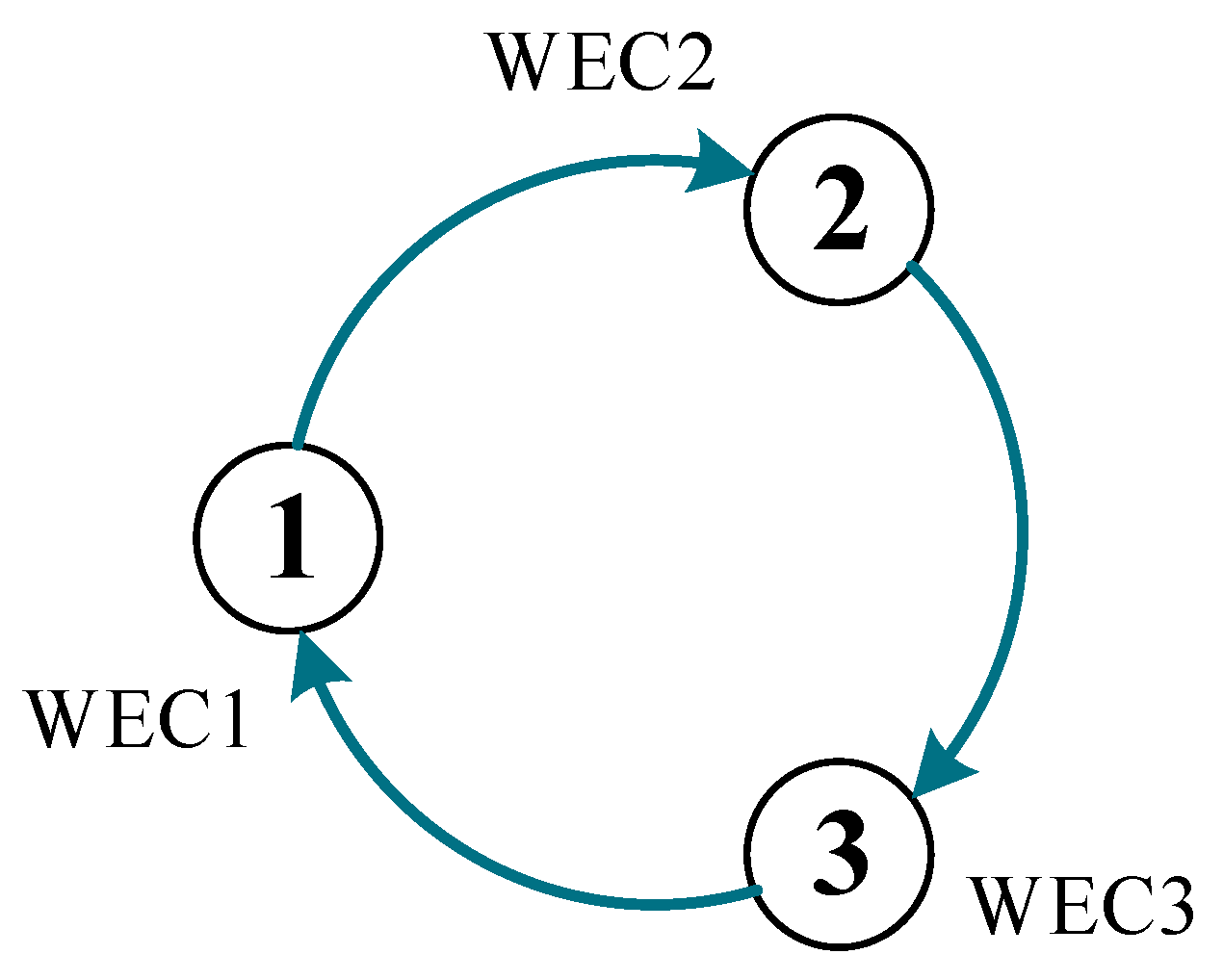
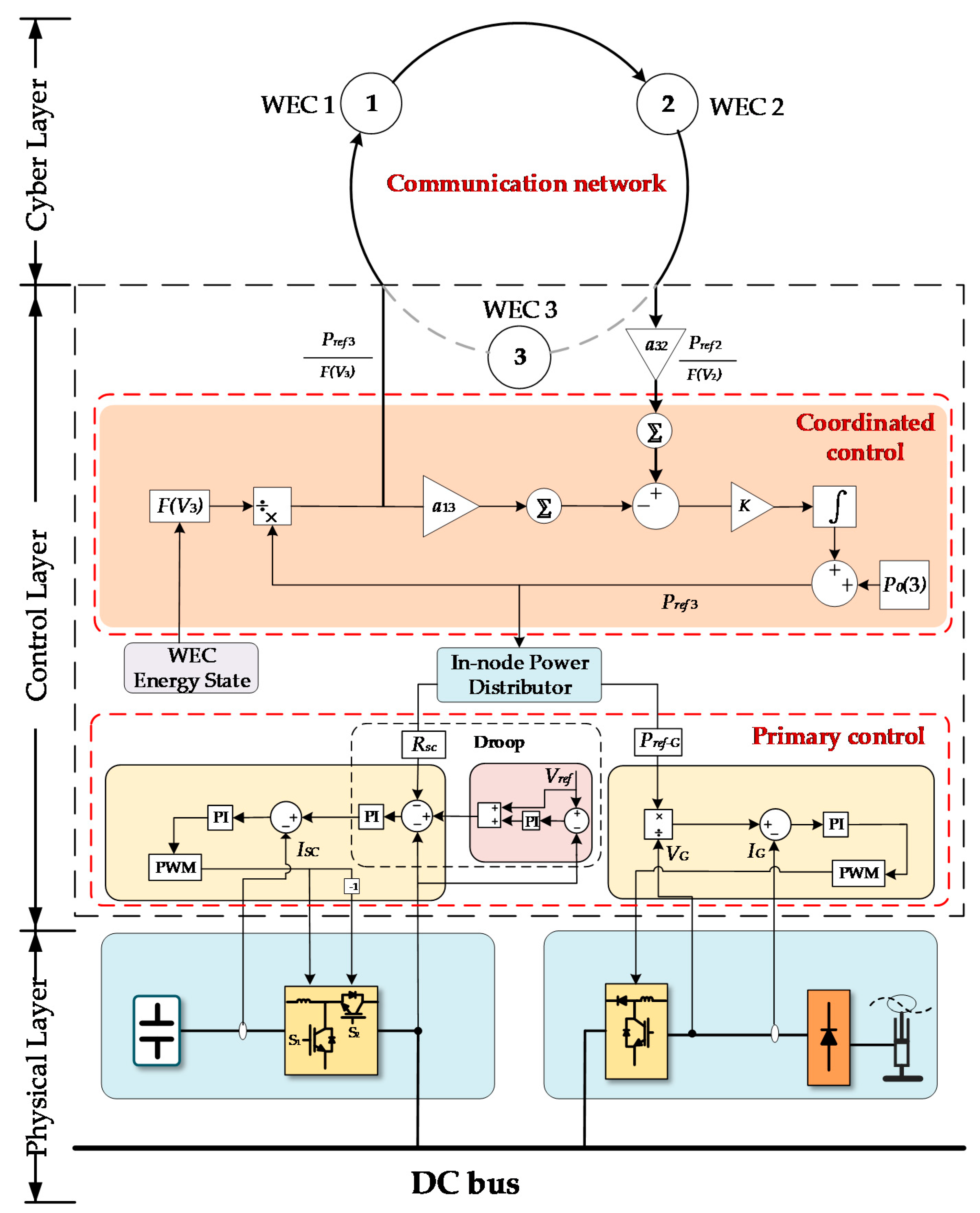
In this paper, a distributed advection-based coordinated control method is proposed as the secondary control strategy to implement the coordinated power outputs of an array of WECs and to satisfy the sum of the power output, which is matched with the load requirement. The advection algorithm of MAS is the modified consensus method inspired by the distribution process, which is actively transported by a flow field [
18,
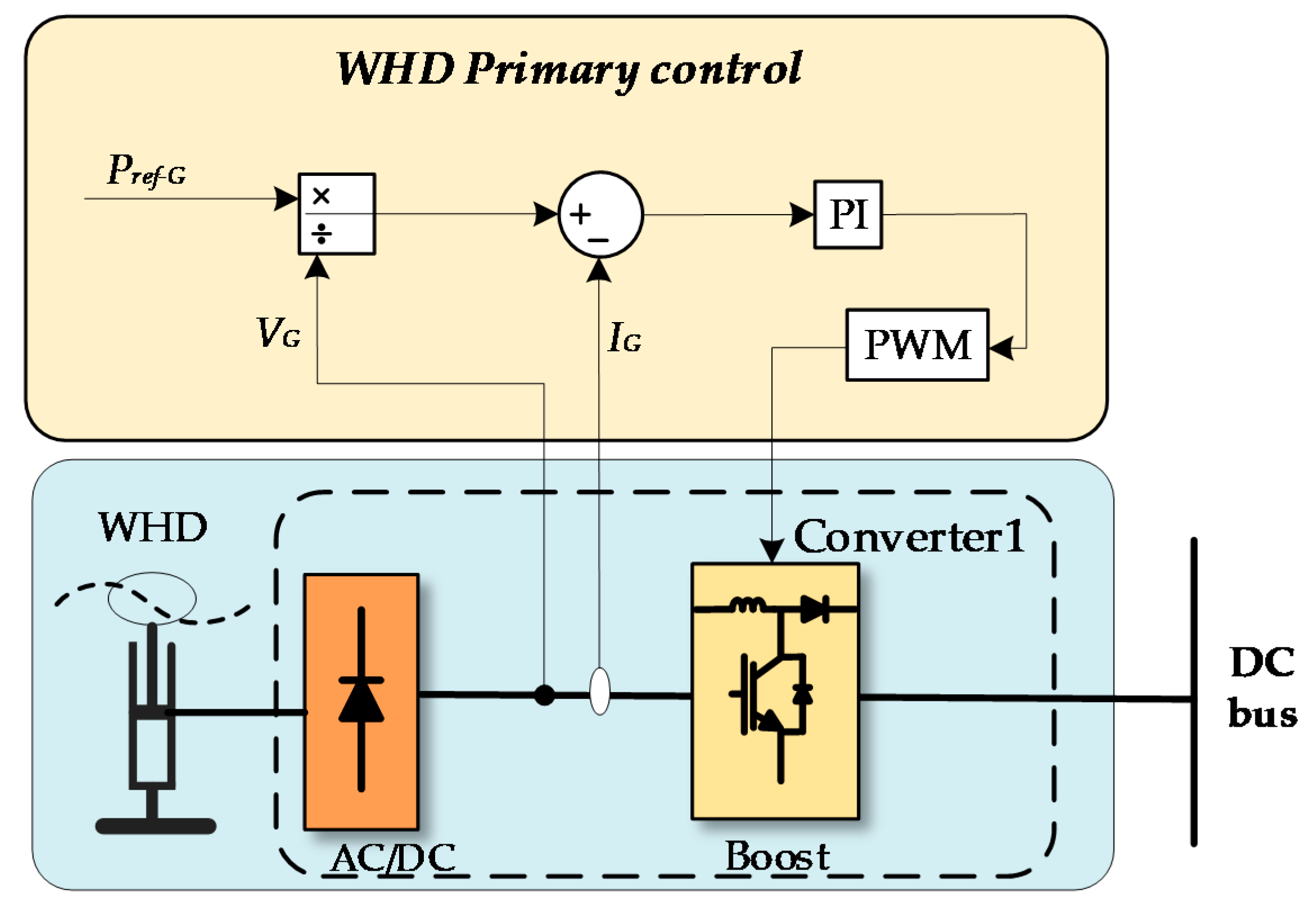
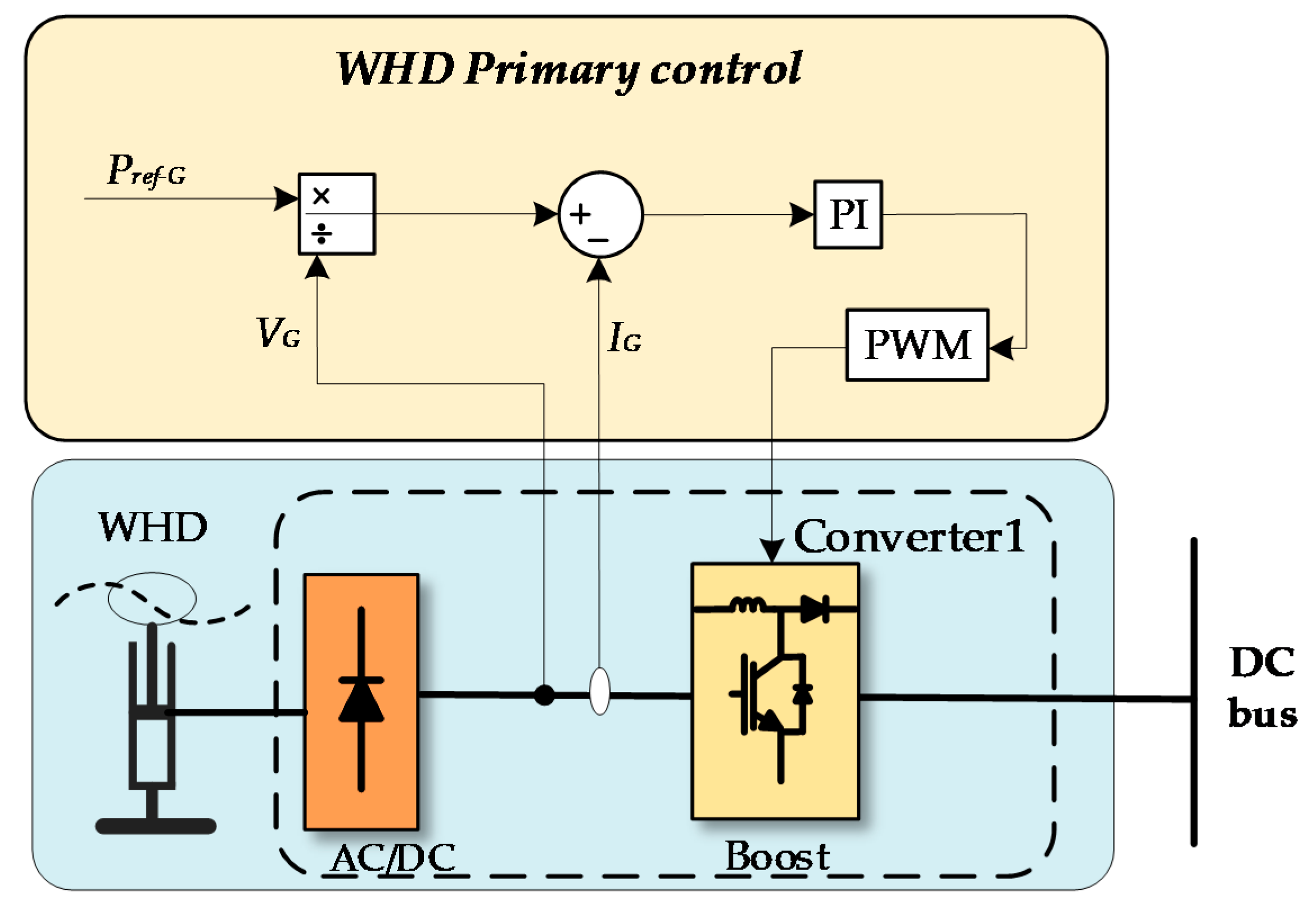
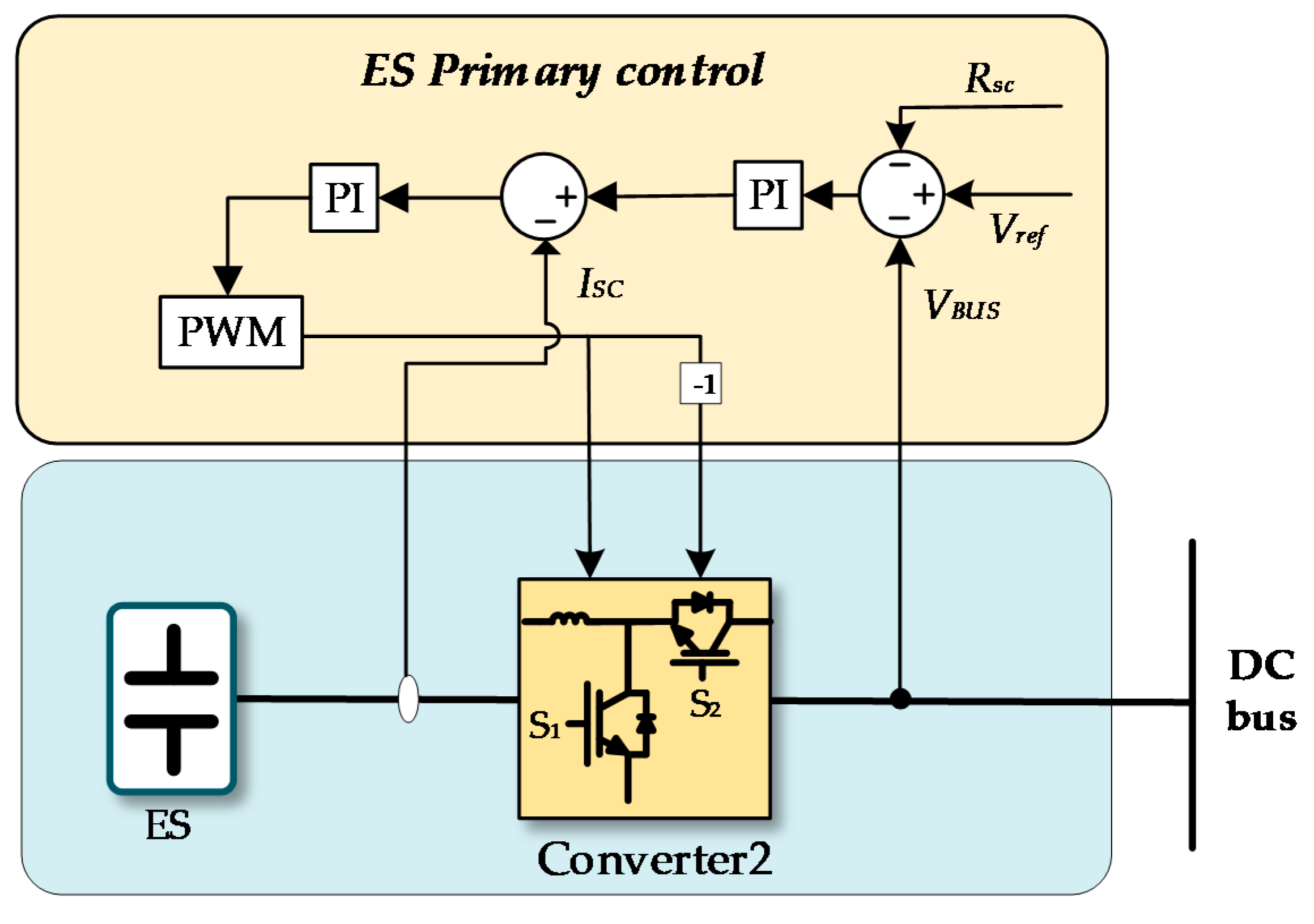
19]. In this control framework, each WEC unit has its local control and energy management, known as the primary control, which coordinates the power outputs of the energy storage (ES) and the wave-harvesting device (WHD) according to the current rest energy in ES and the local ocean wave conditions. To guarantee that the total output of the WECs array satisfies the load requirement, an advection-based consensus algorithm is applied as the coordinated control law that dispatches appropriate power desired to each WEC unit by its local controller.
The main contributions of this paper are two-fold. First, a distributed control method based on the advection consensus algorithm is proposed as a coordinated control law of the WEC array in order that its total output power strictly matches the load power requirements, and the output power of each WEC satisfies the constraints of the energy condition of the ocean and the ES. Secondly, the experimental platform of a WEC array is designed and built to validate the control algorithm and system performance.
The remainder of this paper is organized as follows:
Section 2 introduces the basic knowledge implemented in this paper.
Section 3 elaborately describes the hierarchical system structure of the WEC array, including the primary control of WEC and the secondary control of the advection algorithm. In
Section 4, the simulation examples are applied to verify the validity of the proposed control methods, and experimental tests are implemented and analyzed.
Section 5 mainly discusses the limitations of this paper and the direction of future research. Finally,
Section 6 summarizes the main research work and conclusions of this paper.
5. Discussions
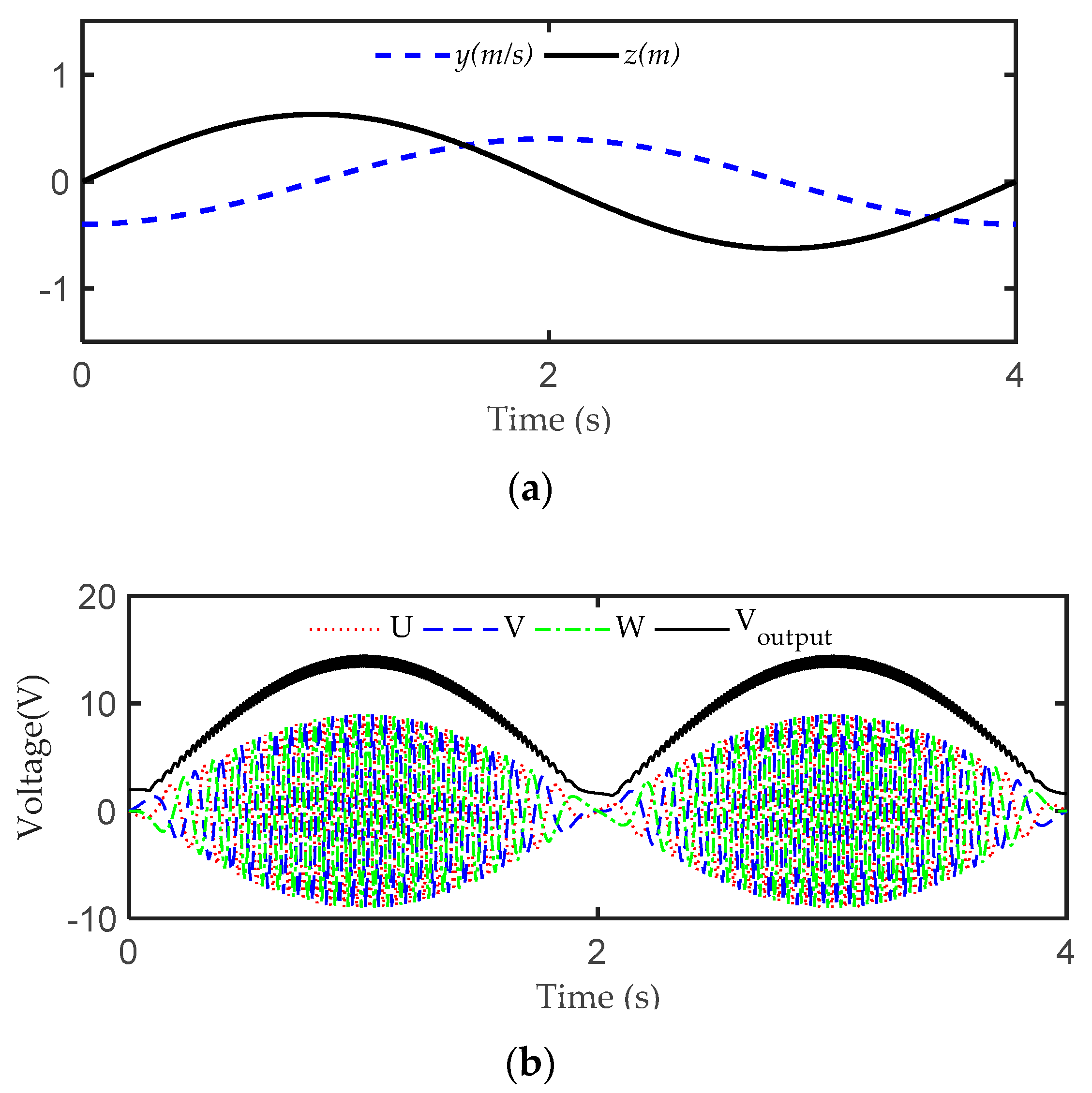
To facilitate the simulation of the buoy motion in the laboratory environment, the complex irregular wave-energy condition is simplified to be regular. The buoy motion is assumed to be a reciprocating motion with sinusoidal waveform variation.
Figure 8 illustrates the buoy movement and terminal voltage waveforms of WHD. However, the simplifying assumption is reasonable due to only focusing on the energy dispatch after harvesting wave energy in this paper. When an integrated wave-to-wires experiment is developed, the complexity of the real ocean environment cannot be ignored. Considering and simulating the real wave conditions reserves is a future study to be pursued.
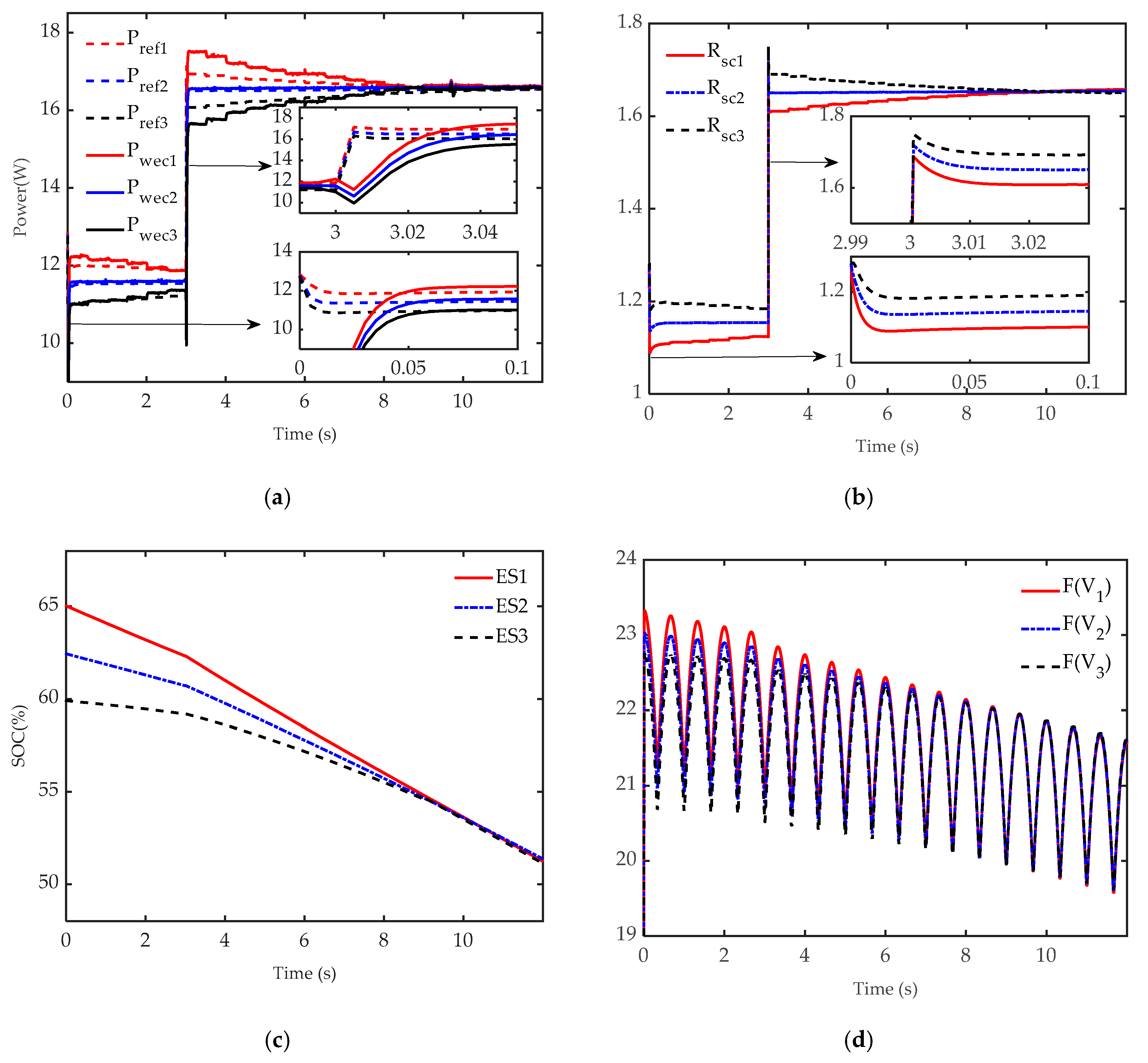
In this paper, is applied to evaluate the energy condition of each WEC. However, the energy condition of each WEC is determined by two independent energy sources—WHD and ES. Although can accurately evaluate the energy level of each WEC, the scale ignores the error information of WHD and ES energy conditions. Therefore, the lack of information about the energy condition error of two energy sources may lead to the reduction of the sensitivity of the WECs array to the real wave-energy conditions. Furthermore, in the proposed algorithm, is segmented and considered to be time-invariant for each period of time. In fact, the energy condition of each WEC is a continuous variable with the power outputs. This fact also implies that the optimal power dispatch is also an important research direction for the WECs array.
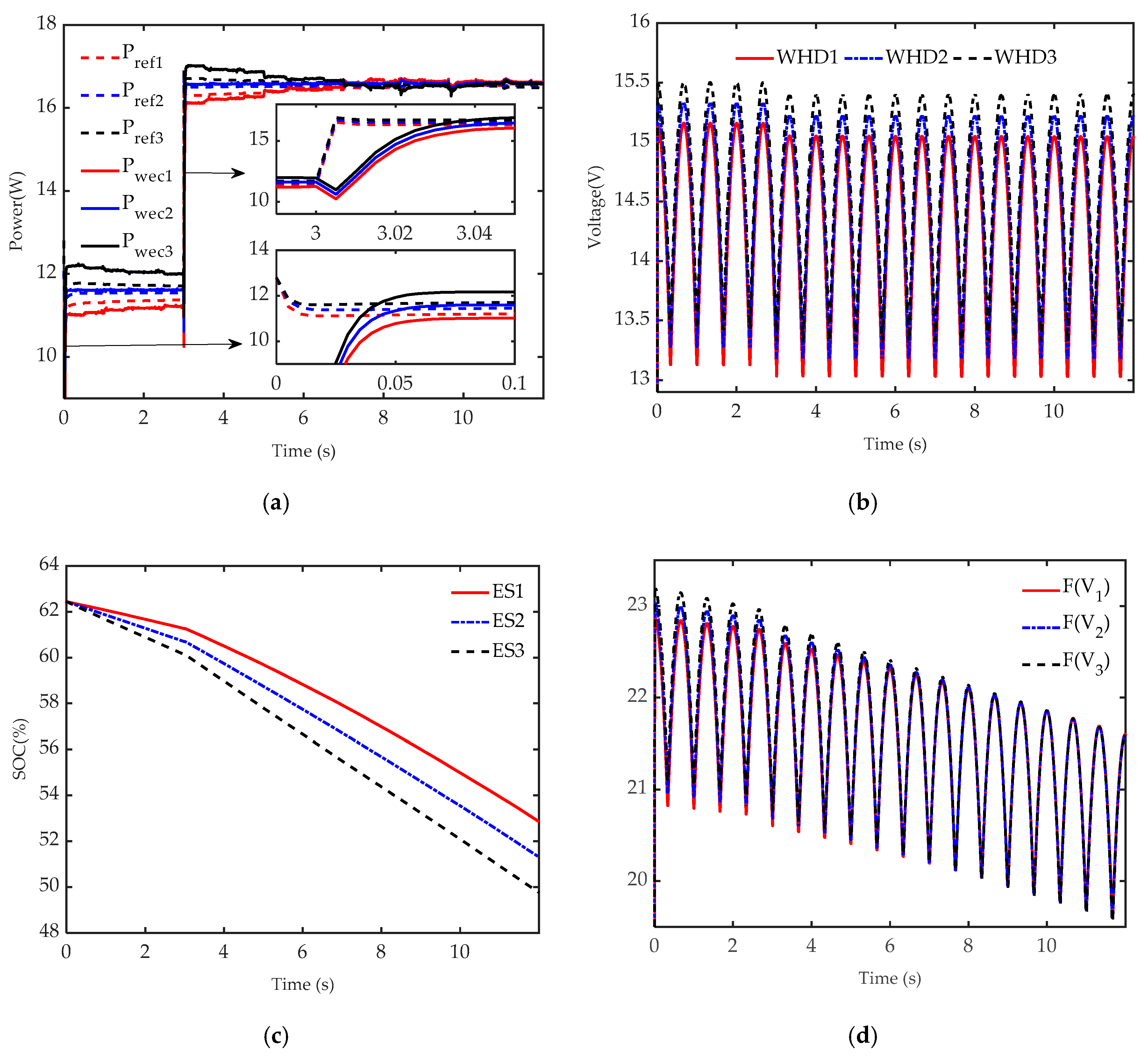
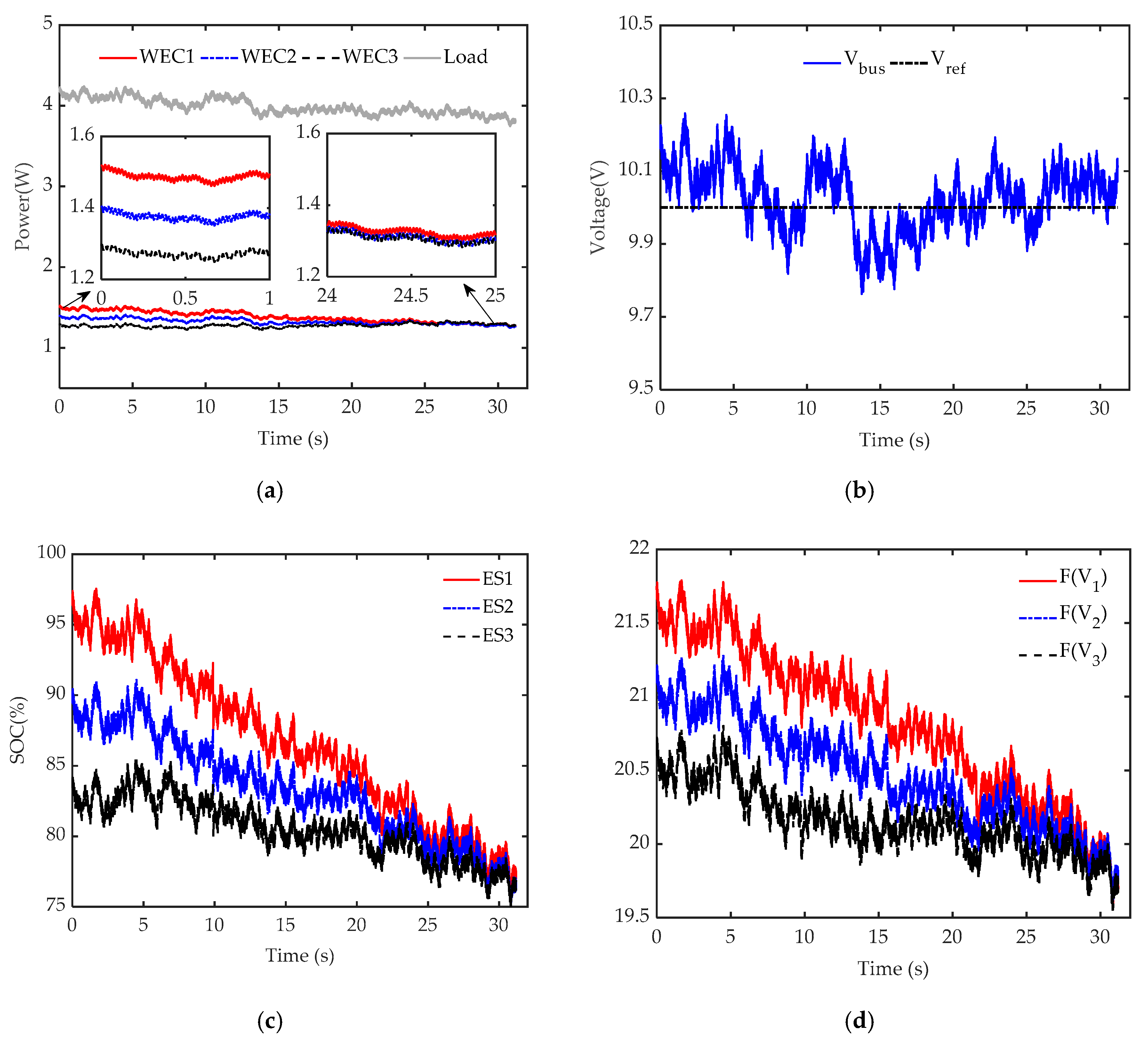
According to the experimental results, as shown in
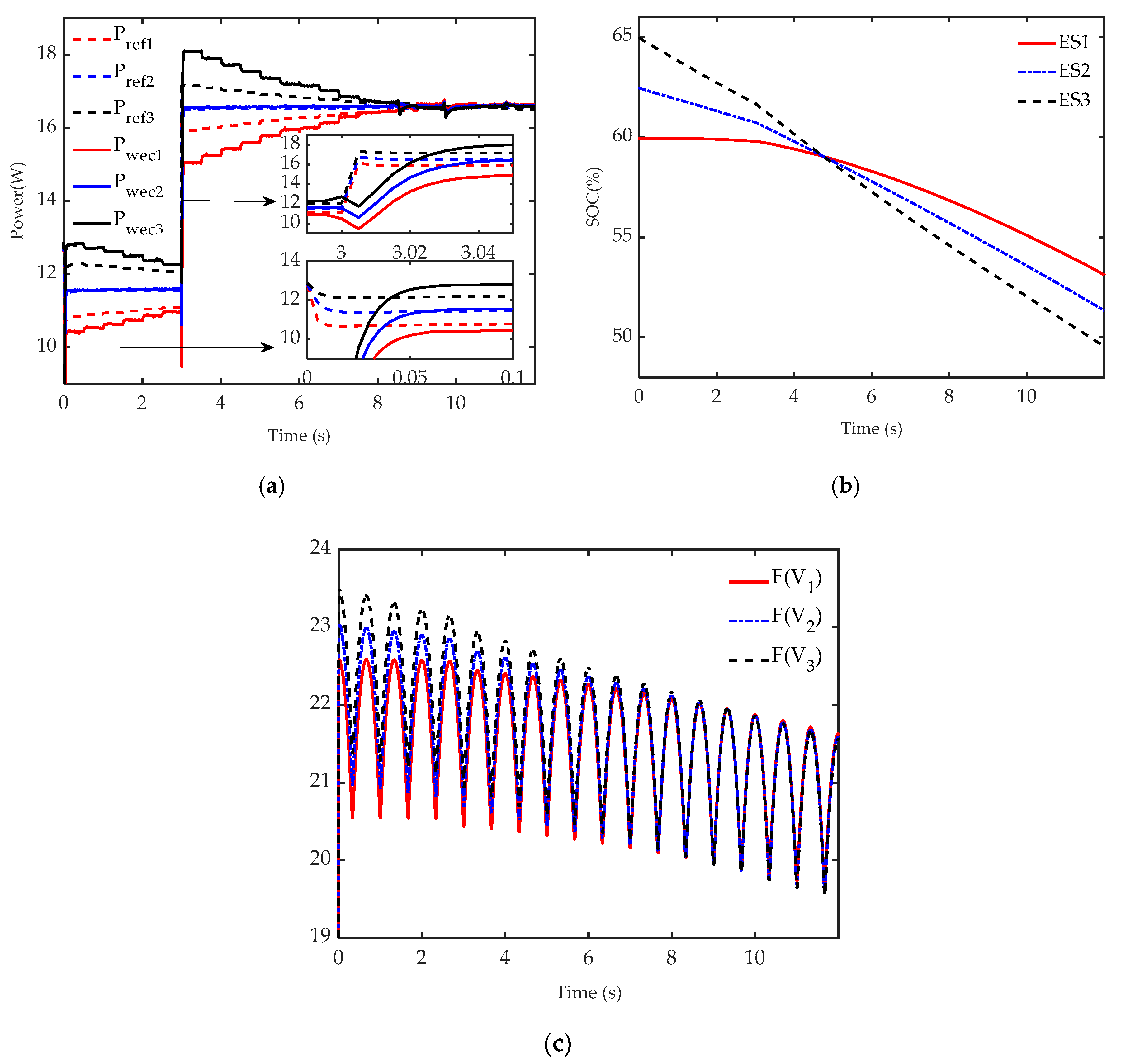
Figure 15, the SOC of each ES tends to be consistent, and the WEC with higher SOC is required to take on more power output. However, the specific power demand means that each WEC is assigned to output the specified amount of electric power, rather than maximized output according to wave-energy conditions. Therefore, the MPPT control of WEC is necessary to consider in order to capture the wave energy more efficiently.
6. Conclusions
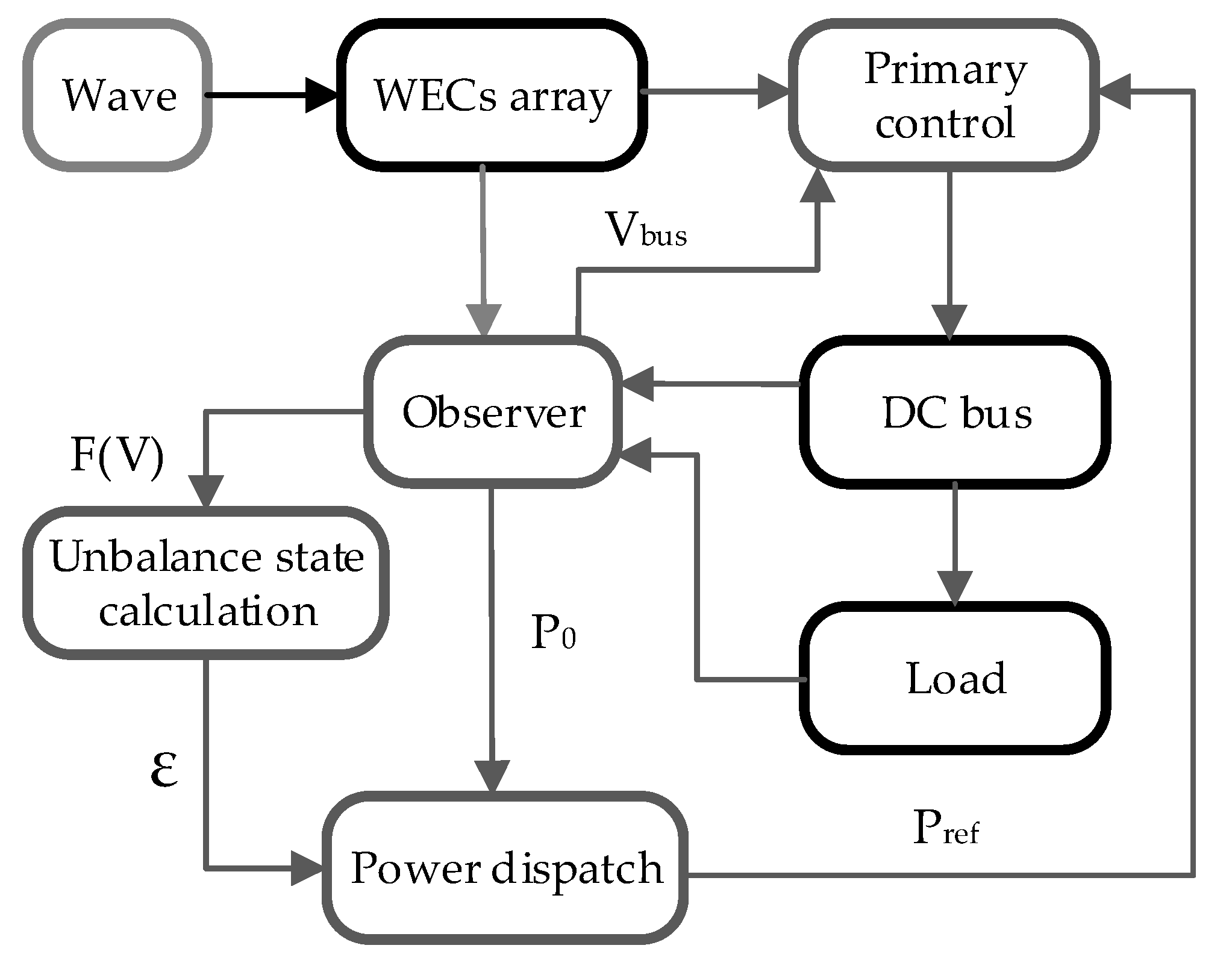
This paper develops a control framework of a WEC array consisting of hierarchical control architecture. In the system framework, each WEC has its local control and energy management, known as the primary control, which coordinates the power outputs of the ES and the WHD according to the current rest energy in ES and the local ocean wave conditions. An advection-based distributed coordinated algorithm—a modified consensus method inspired by diffusion of matters in a flow field—is applied to the secondary control strategy of the system to regulate the power outputs of each WEC to guarantee the load power supply in a coordinated manner. Furthermore, through the digital simulation and physical experiment of the WEC array, the validity of the control algorithm and the system performance are examined. The results demonstrate that the WEC array using the proposed control method accurately responds to the demand for power supply under conditions of unbalanced wave energy.
In the future, more realistic ocean wave conditions will be further considered, and the integrated control strategies from waves to wires will be developed to improve the performance of the WEC array.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}