Advection-Based Coordinated Control for Wave-Energy Converter Array



Abstract
:1. Introduction
2. Preliminary
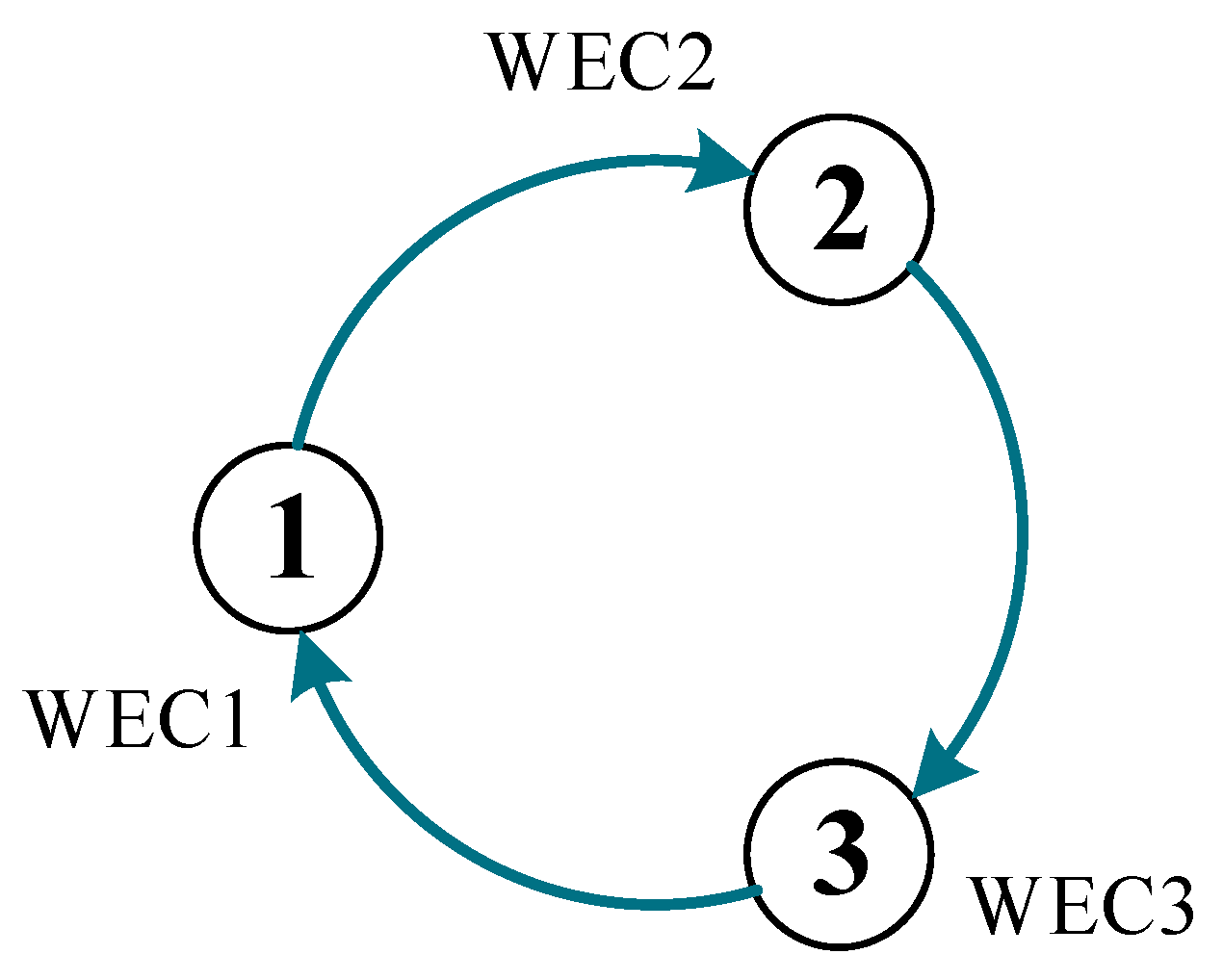
2.1. Graph Theory
2.2. Advection Algorithm
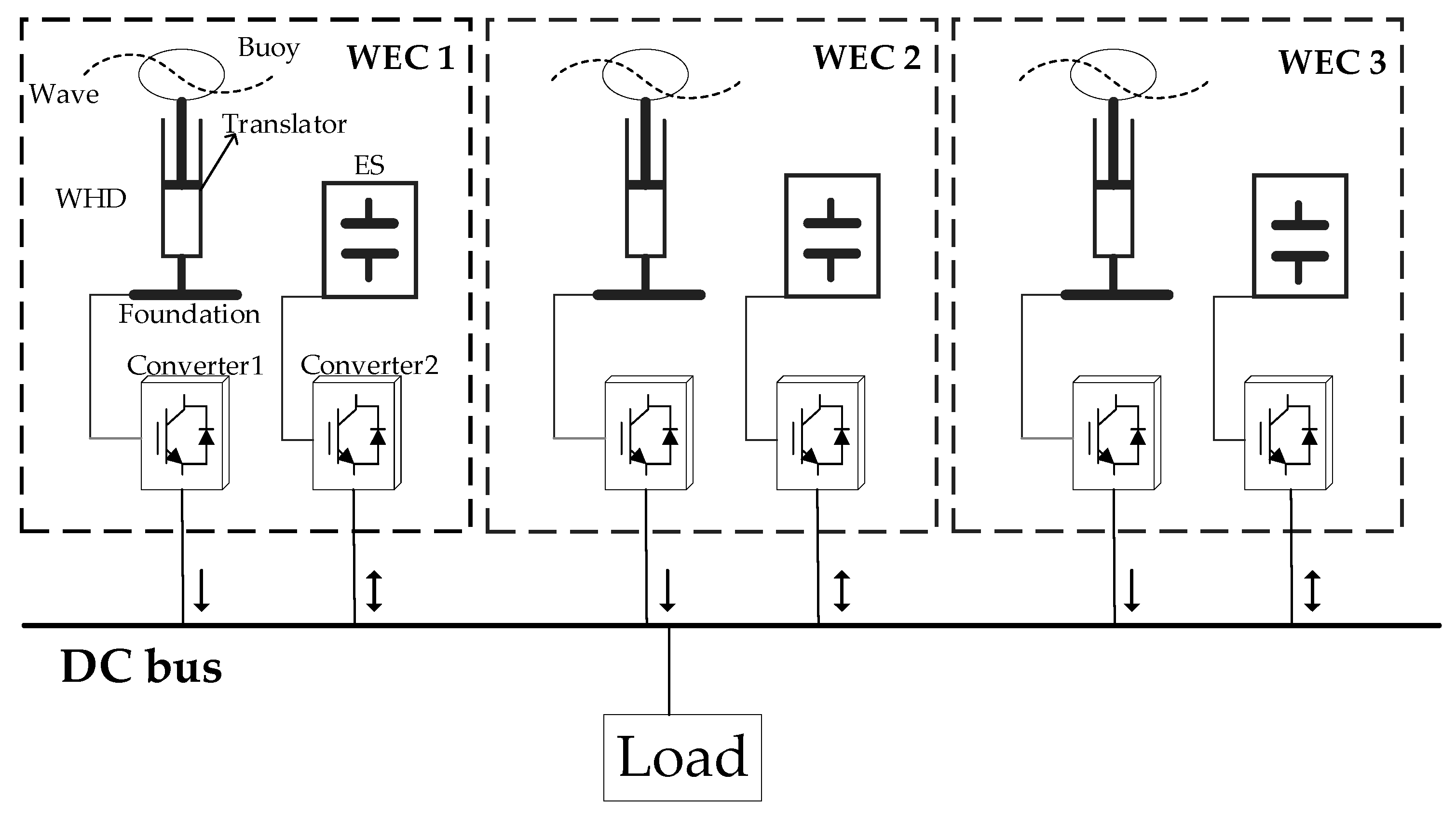
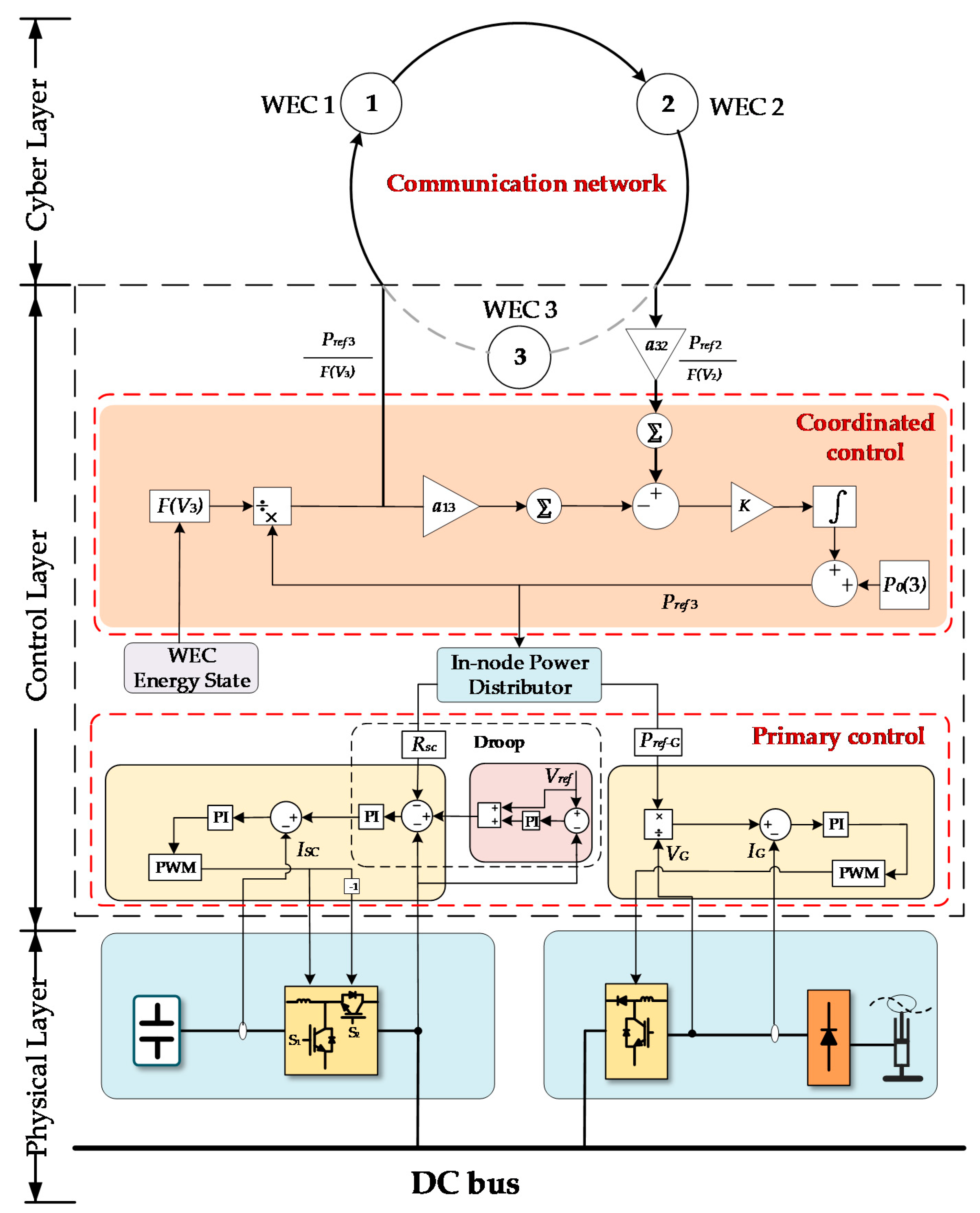
3. Structure of Distributed WEC Array
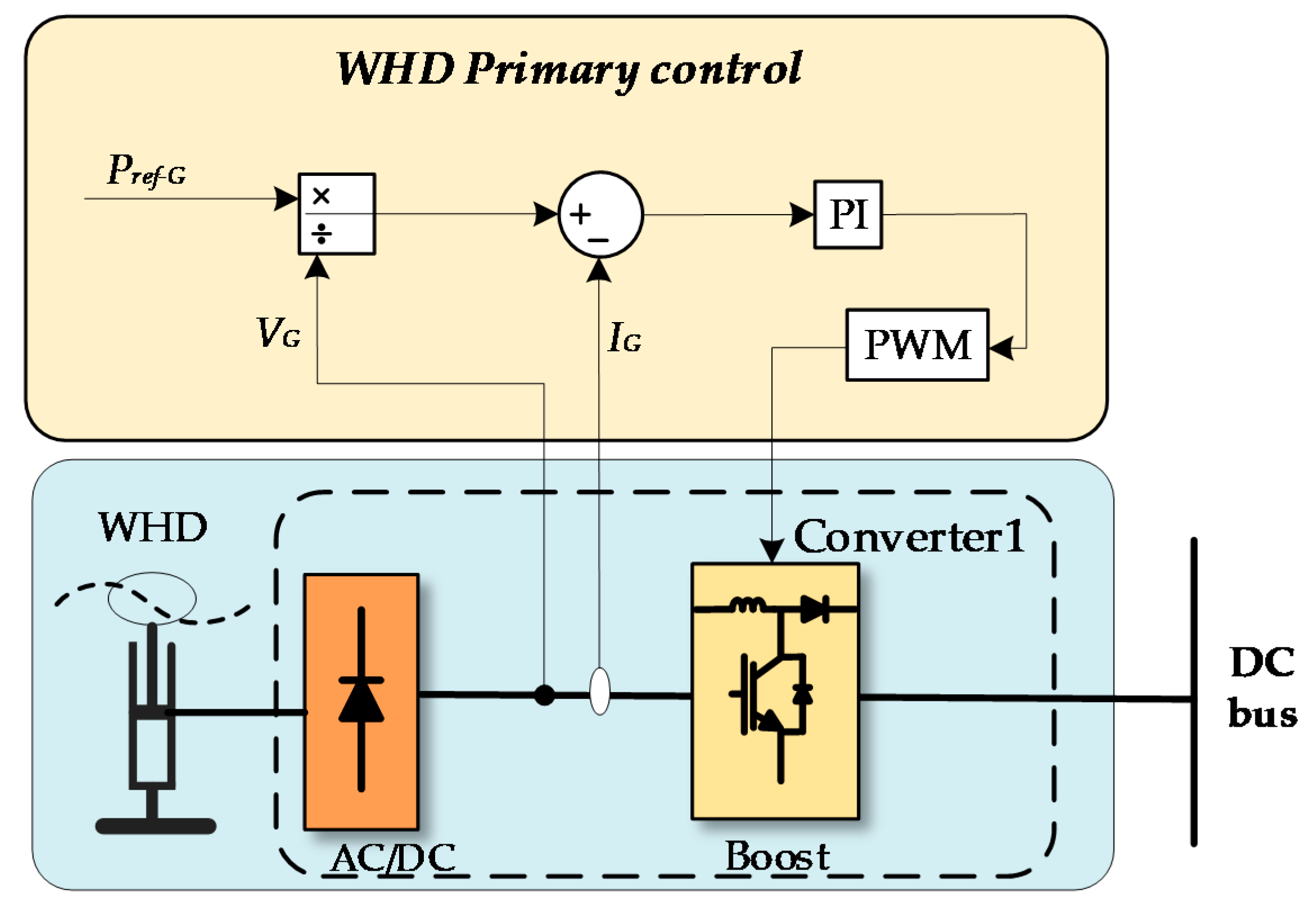
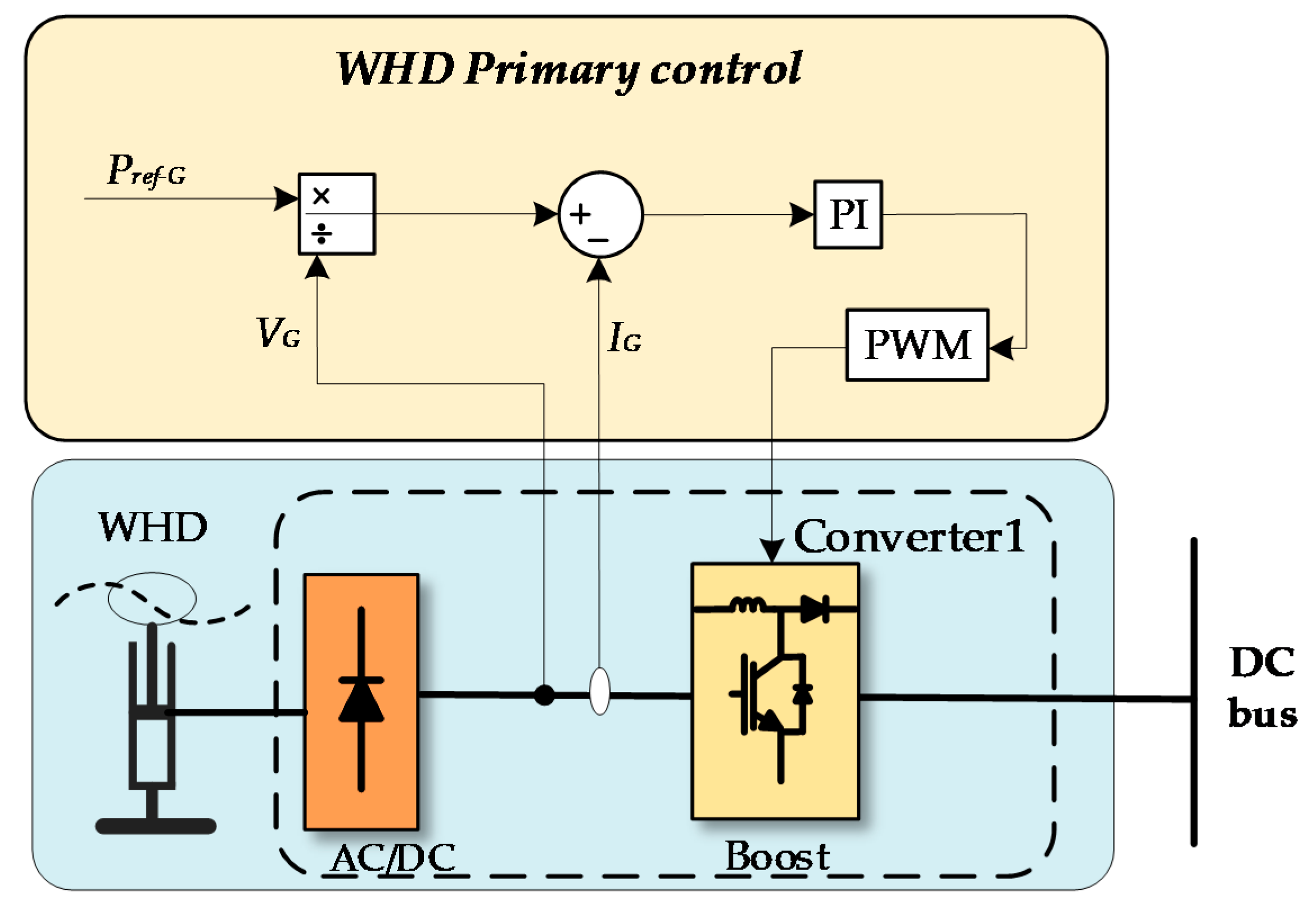
3.1. Primary Control of WEC
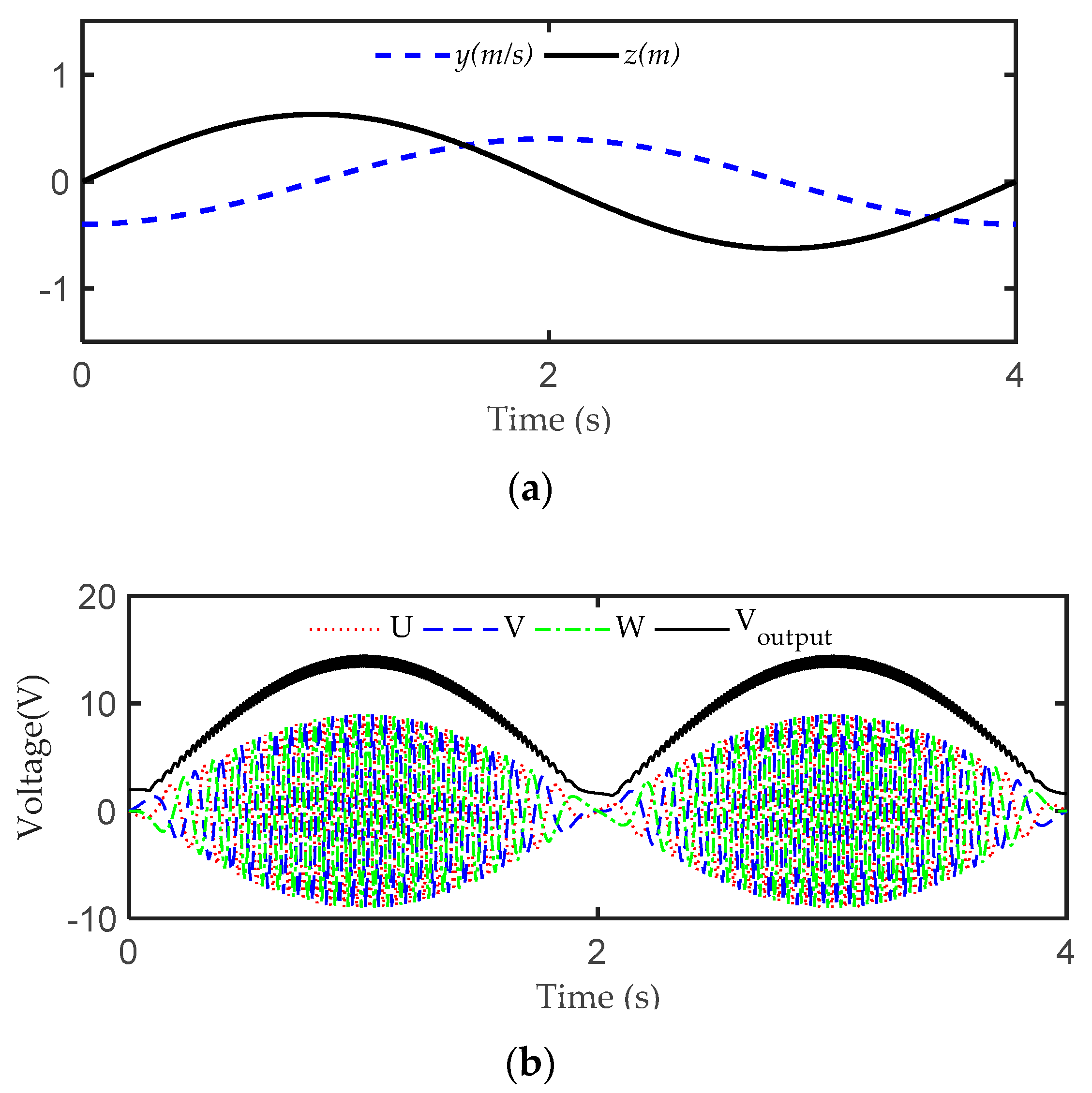
3.1.1. WHD Primary Control
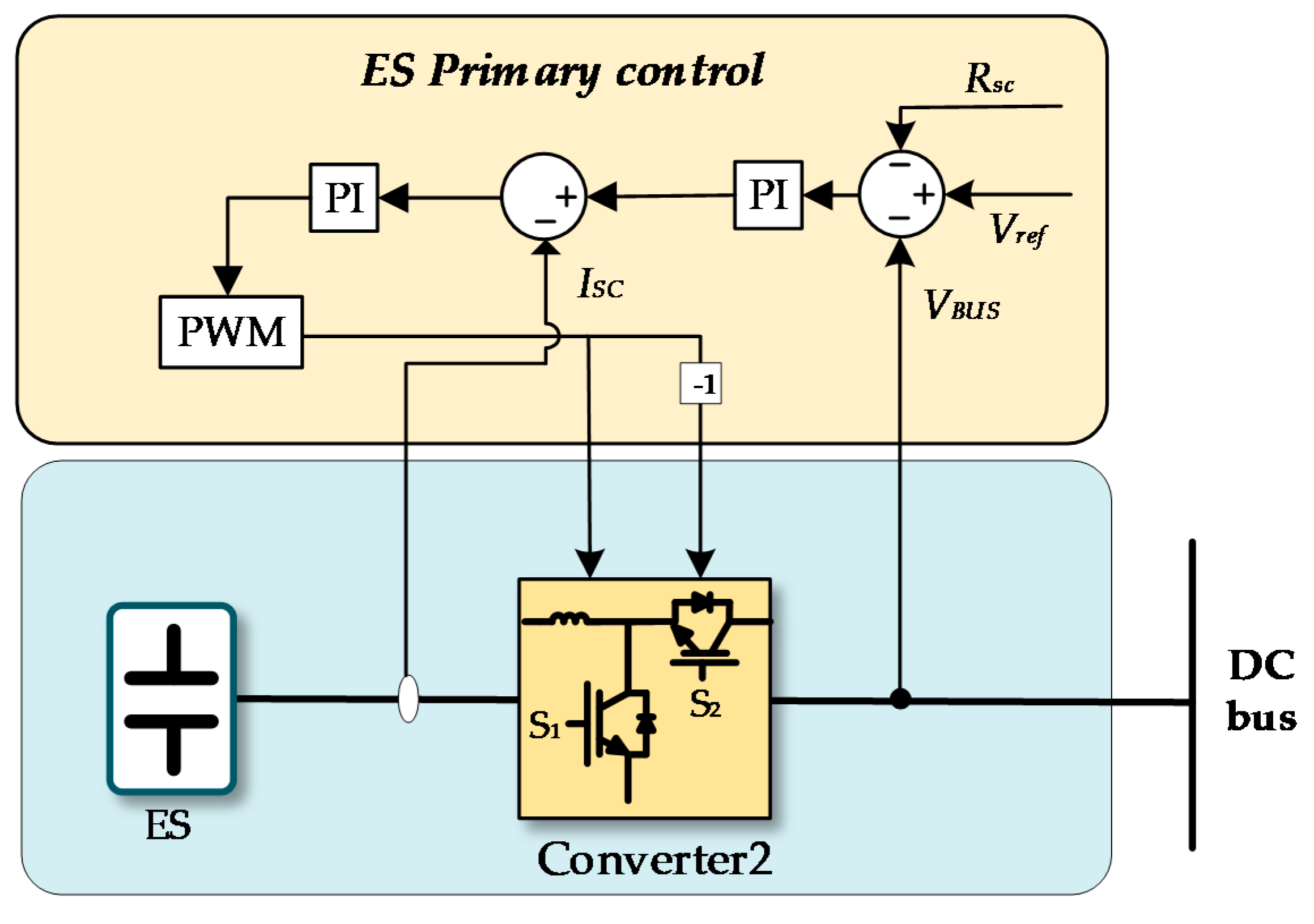
3.1.2. ES Primary Control
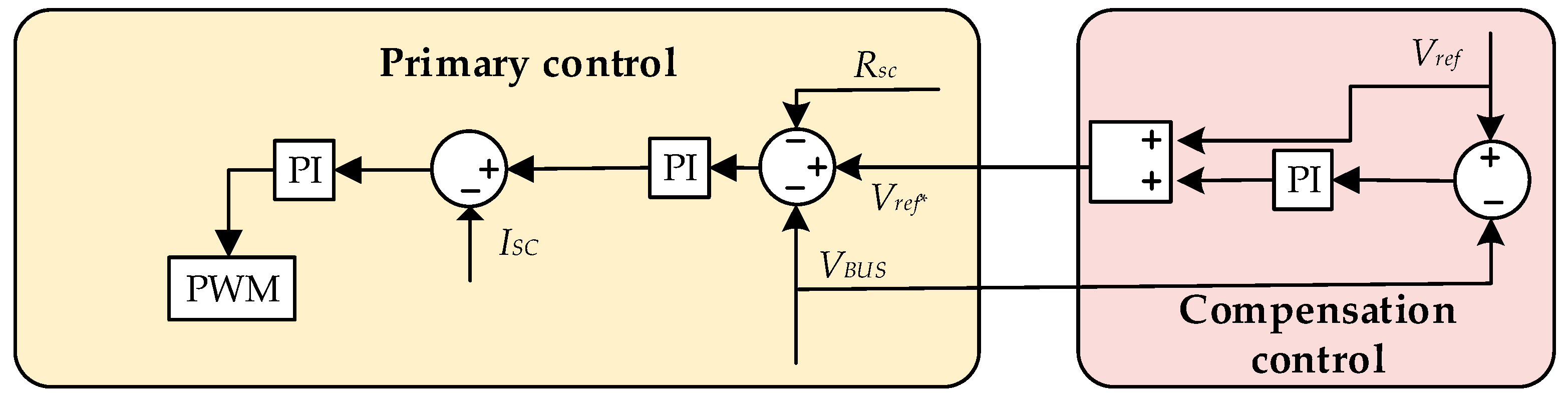
3.1.3. Compensation Control
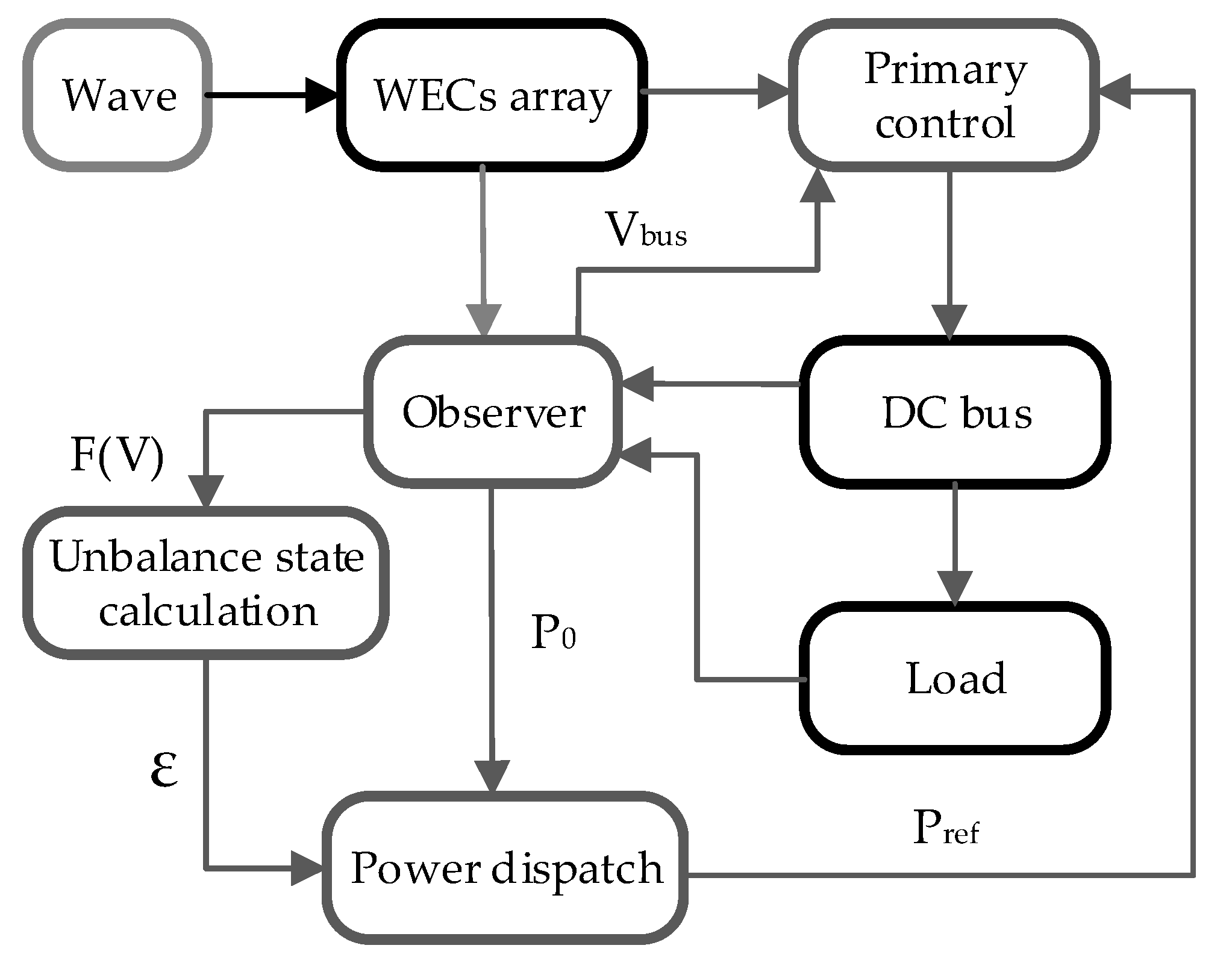
3.2. Power Dispatch Based on Advection Algorithm
4. Simulation and Experiment Analysis
4.1. Simulation Setup
4.2. Simulation Results
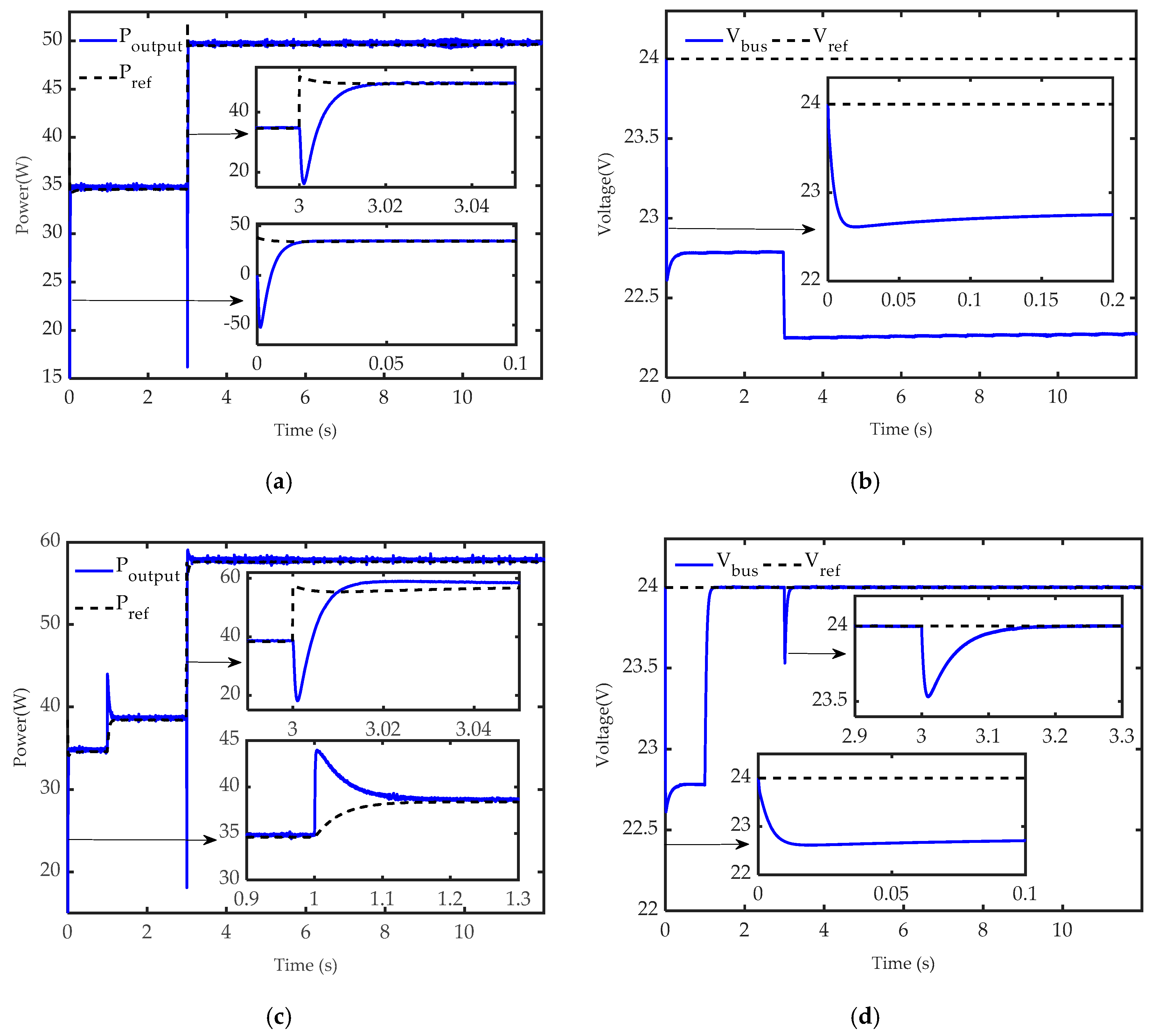
4.2.1. WECs with Compensation Controller
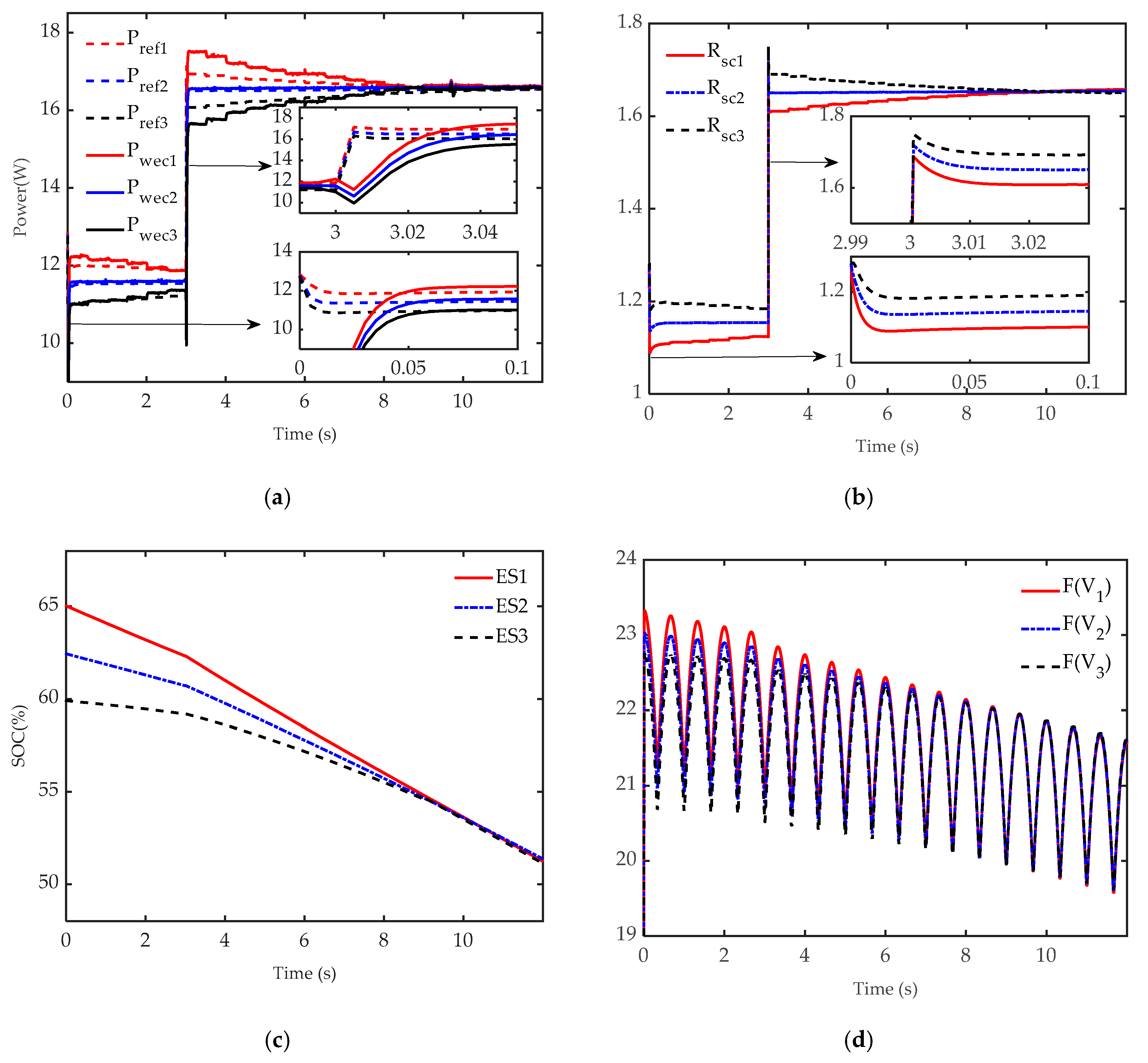
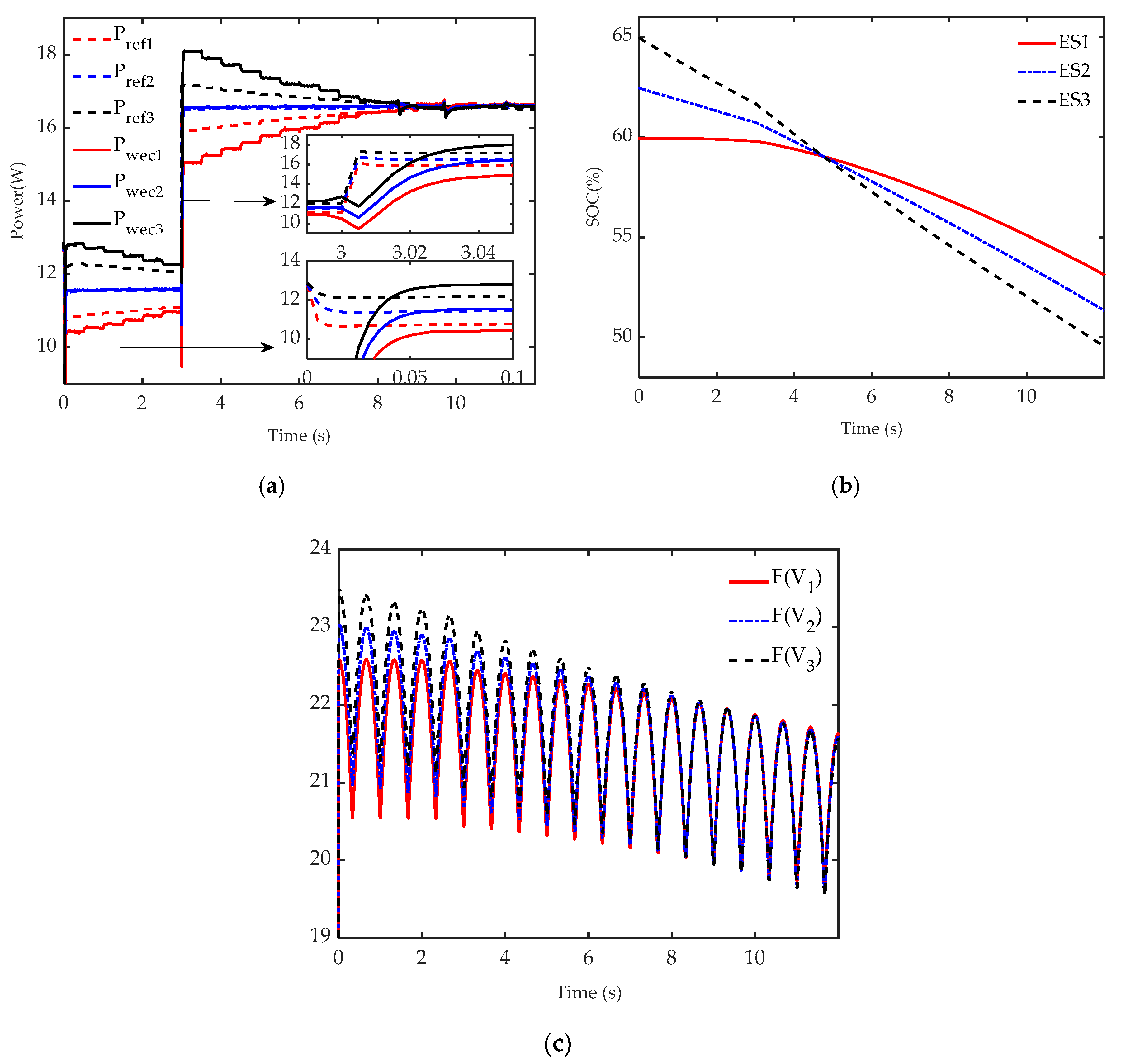
4.2.2. WECs with Different Initial SOC
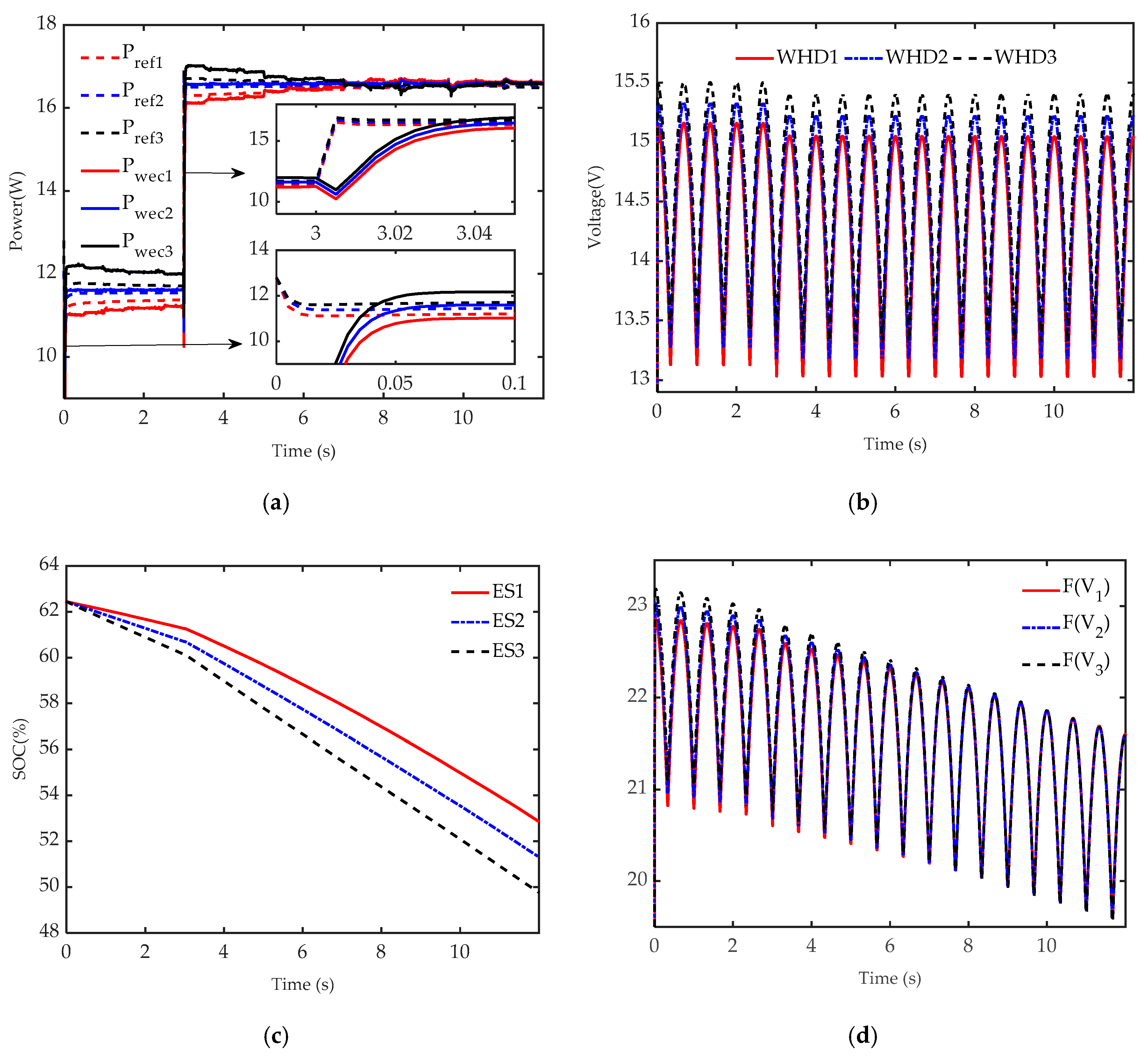
4.2.3. WECs with Different Initial WHD Output
4.2.4. WECs with Different Initial WHD Output and SOC
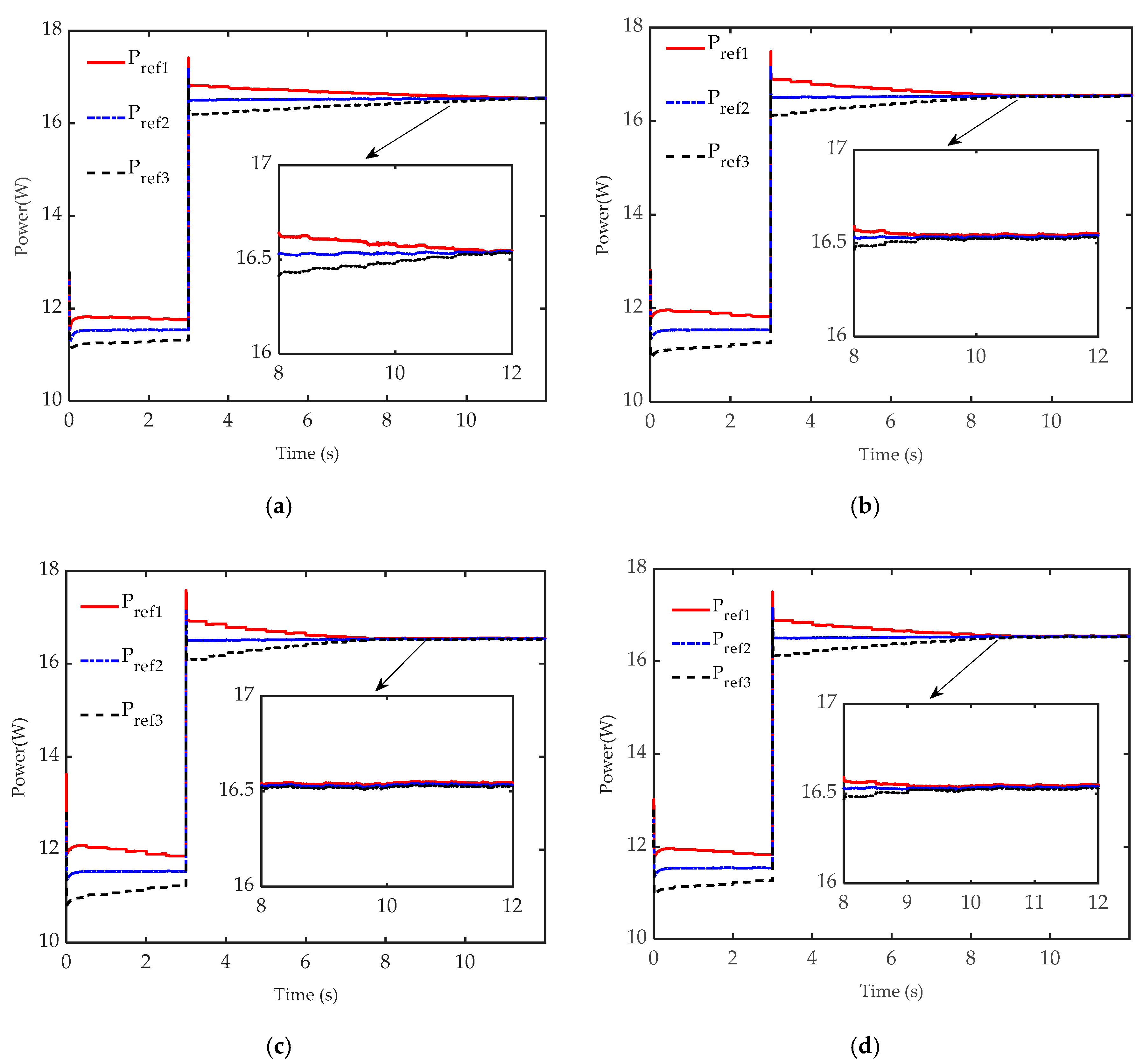
4.2.5. Convergence Rate
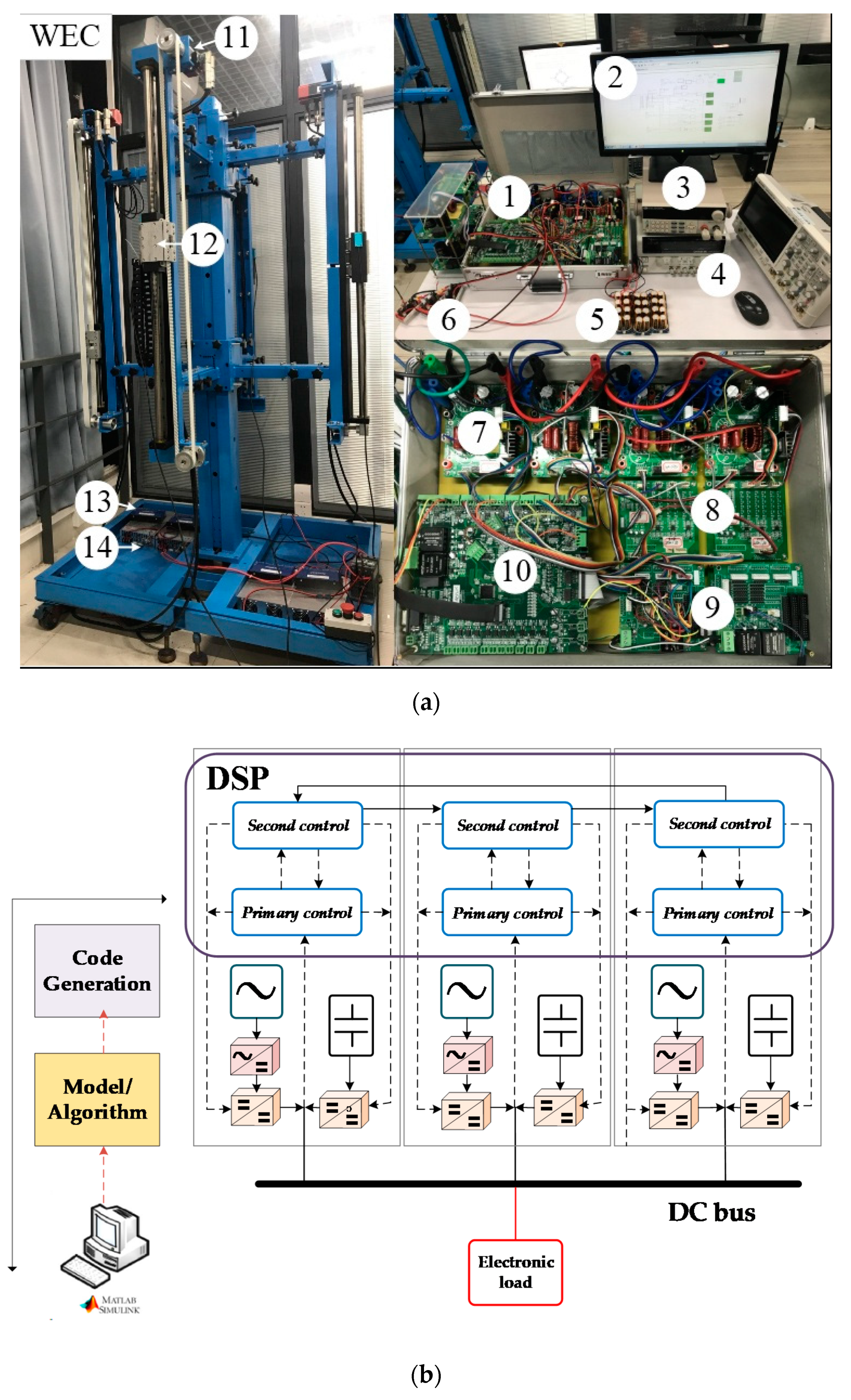
4.3. Experimental Setup
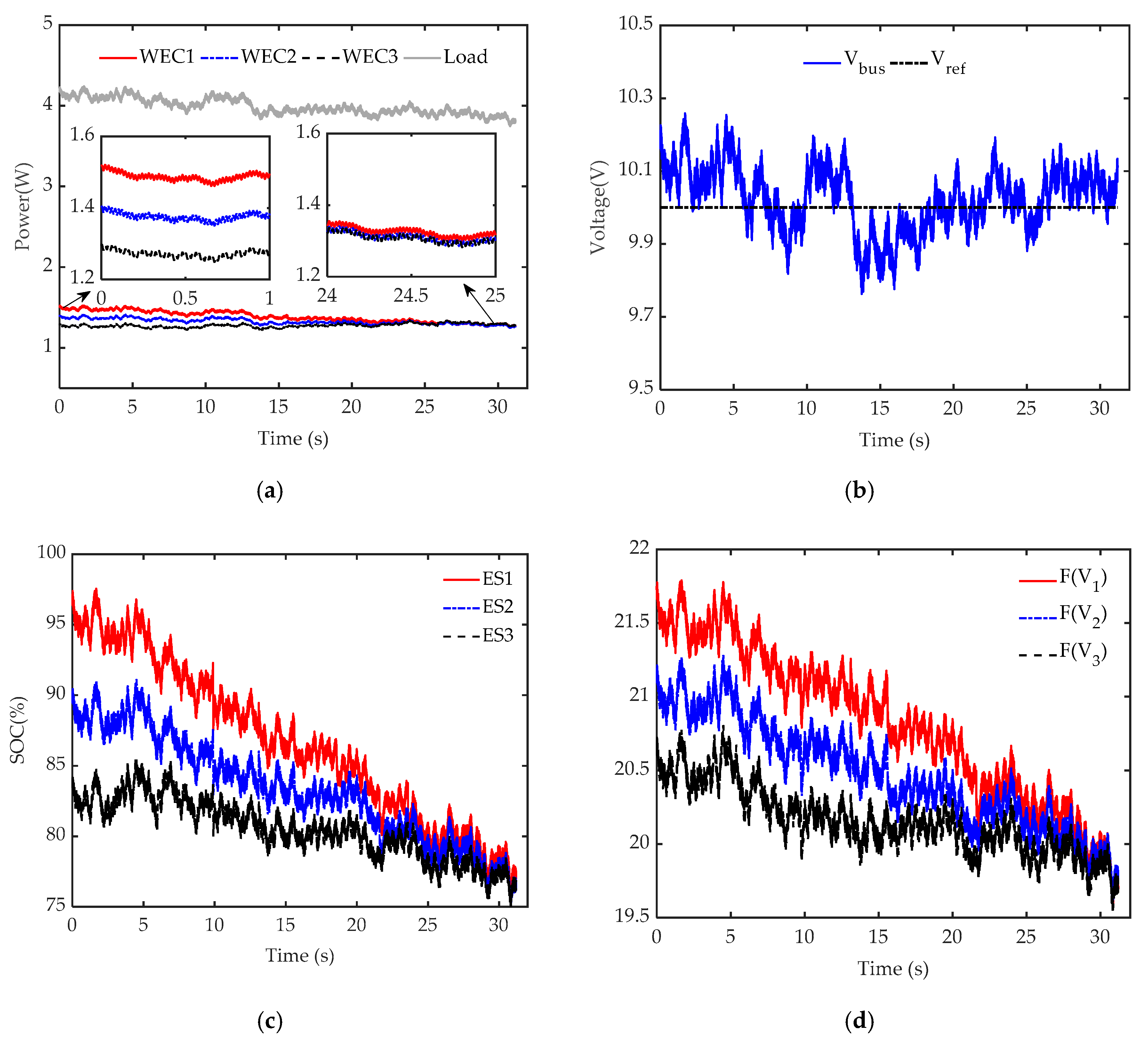
4.4. Experimental Results
5. Discussions
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ES | Energy storage |
| LPMG | Linear permanent magnet generator |
| MAS | Multiagent system |
| MG | Microgrid |
| MPPT | Maximum Power Point Tracking |
| SOC | State of charging |
| WEC | Wave-energy converter |
| WHD | Wave-harvesting device |
References
- Aderinto, T.; Li, H. Ocean Wave Energy Converters: Status and Challenges. Energies 2018, 11, 1250. [Google Scholar] [CrossRef]
- Xiao, X.; Huang, X.; Kang, Q. A Hill Climbing Method-Based Maximum Power Point-Tracking Strategy for Direct-Drive Wave Energy Converters. IEEE Trans. Ind. Electron. 2015, 63, 257–267. [Google Scholar] [CrossRef]
- Amon, E.A.; Brekken, T.K.A.; Schacher, A.A. Maximum Power Point Tracking for Ocean Wave Energy Conversion. IEEE Trans. Ind. App. 2012, 48, 1079–1086. [Google Scholar] [CrossRef]
- Marei, M.I.; Mokhtar, M.; El-Sattar, A.A. MPPT strategy based on speed control for AWS-based wave energy conversion system. Renew. Energy 2015, 83, 305–317. [Google Scholar] [CrossRef]
- Li, G.; Belmont, M.R. Model predictive control of sea wave energy converters—Part I: A convex approach for the case of a single device. Renew. Energy 2014, 69, 453–463. [Google Scholar] [CrossRef]
- Hardy, P.; Cazzolato, B.S.; Ding, B.; Prime, Z. A maximum capture width tracking controller for ocean wave energy converters in irregular waves. Ocean. Eng. 2016, 121, 516–529. [Google Scholar] [CrossRef]
- Thomas, S.; Eriksson, M.; Göteman, M.; Hann, M.; Isberg, J.; Engström, J. Experimental and Numerical Collaborative Latching Control of Wave Energy Converter Arrays. Energies 2018, 11, 3036. [Google Scholar] [CrossRef]
- Thomas, S.; Giassi, M.; Eriksson, M.; Göteman, M.; Isberg, J.; Ransley, E.; Hann, M.; Engström, J. A Model Free Control Based on Machine Learning for Energy Converters in an Array. Big Data Cogn. Comput. 2018, 2, 36. [Google Scholar] [CrossRef]
- Wu, F.; Ju, P.; Zhang, X.P.; Qin, C.; Peng, G.J.; Huang, H.; Fang, J. Modeling, control strategy, and power conditioning for direct-drive wave energy conversion to operate with power grid. Proc. IEEE 2013, 101, 925–941. [Google Scholar] [CrossRef]
- Kovaltchouk, T.; Multon, B.; Ahmed, H.B.; Aubry, J.; Venet, P. Enhanced aging model for supercapacitors taking into account power cycling: Application to the sizing of an energy storage system in a direct wave energy converter. IEEE Trans. Ind. Appl. 2015, 51, 2405–2414. [Google Scholar] [CrossRef]
- Pegueroles-Queralt, J.; Bianchi, F.D.; Gomis-Bellmunt, O. A Power Smoothing System Based on Supercapacitors for Renewable Distributed Generation. IEEE Trans. Ind. Electron. 2015, 62, 343–350. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; De Vicuna, L.G.; Castilla, M. Hierarchical Control of Droop-Controlled AC and DC Microgrids—A General Approach Toward Standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Shafiee, Q.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Hierarchical control for multiple dc-microgrids clusters. IEEE Trans. Energy Convers. 2014, 29, 922–933. [Google Scholar] [CrossRef]
- Shafiee, Q.; Guerrero, J.M.; Vasquez, J.C. Distributed Secondary Control for Islanded Microgrids—A Novel Approach. IEEE Trans. Power Electron. 2013, 29, 1018–1031. [Google Scholar] [CrossRef]
- Zhao, T.; Ding, Z. Distributed finite-time optimal resource management for microgrids based on multi-agent framework. IEEE Trans. Ind. Electron. 2017, 65, 6571–6580. [Google Scholar] [CrossRef]
- Lagorse, J.; Paire, D.; Miraoui, A. A multi-agent system for energy management of distributed power sources. Renew. Energy 2010, 35, 174–182. [Google Scholar] [CrossRef]
- Nasirian, V.; Moayedi, S.; Davoudi, A.; Lewis, F.L. Distributed Cooperative Control of DC Microgrids. IEEE Trans. Power Electron. 2014, 30, 2288–2303. [Google Scholar] [CrossRef]
- Chapman, A. Semi-Autonomous Networks: Effective Control of Networked Systems through Protocols, Design, and Modeling; Springer: Basel, Switzerland, 2015; pp. 4–15. [Google Scholar]
- Chapman, A.; Schoof, E.; Mesbahi, M. Advection on networks with an application to decentralized load balancing. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Vilamoura, Portugal, 7–12 October 2012. [Google Scholar]
- Rao, W.F.; Zhang, B.; Pan, J.F.; Wu, X.; Yuan, J.P.; Qiu, L. Voltage control strategy of DC microgrid with direct drive wave energy generator. In Proceedings of the International Conference on Power Electronics Systems and Applications, Hong Kong, China, 12–14 December 2017. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| ES rated voltage (V) | 12 | 3 | |
| Bus rated voltage (V) | 24 | 0.2 | |
| Load power (W) | 35–55 | 1 | |
| K | 20 | 10 | |
| G | 3 | 0.1 | |
| 2 | 30 | ||
| 150 |
| Parameter | WEC 1 | WEC 2 | WEC 3 |
|---|---|---|---|
| ES initial voltage (V) | 8 | 7.7 | 7.4 |
| ES initial SOC (%) | 65 | 62.5 | 60 |
| WHD voltage (V) | 13.3–15.3 | 13.3–15.3 | 13.3–15.3 |
| Parameter | WEC 1 | WEC 2 | WEC 3 |
|---|---|---|---|
| ES initial voltage (V) | 7.7 | 7.7 | 7.7 |
| ES initial SOC (%) | 62.5 | 62.5 | 62.5 |
| WHD voltage (V) | 13.4–15.5 | 13.3–15.4 | 13.2–15.3 |
| Parameter | WEC 1 | WEC 2 | WEC 3 |
|---|---|---|---|
| ES initial voltage (V) | 7.8 | 7.7 | 7.6 |
| ES initial SOC (%) | 63.5 | 62.5 | 61.5 |
| WHD voltage (V) | 13.4–15.5 | 13.3–15.4 | 13.2–15.3 |
| Parameters | WEC 1 | WEC 2 | WEC 3 |
|---|---|---|---|
| ES rated voltage (V) | 10.8 | 10.8 | 10.8 |
| ES initial voltage (V) | 10.6 | 10.2 | 9.8 |
| ES initial SOC (%) | 95 | 89 | 82 |
| WHD voltage (V) | 9.7–10.9 | 9.7–10.9 | 9.7–10.9 |
| K | 20 | 20 | 20 |
| g | 3 | 3 | 3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Zhang, B.; Qiu, L.; Chen, S.; Yuan, J.; Luo, J. Advection-Based Coordinated Control for Wave-Energy Converter Array. Energies 2019, 12, 3567. https://doi.org/10.3390/en12183567
Li H, Zhang B, Qiu L, Chen S, Yuan J, Luo J. Advection-Based Coordinated Control for Wave-Energy Converter Array. Energies. 2019; 12(18):3567. https://doi.org/10.3390/en12183567
Chicago/Turabian StyleLi, Hong, Bo Zhang, Li Qiu, Shiyu Chen, Jianping Yuan, and Jianjun Luo. 2019. "Advection-Based Coordinated Control for Wave-Energy Converter Array" Energies 12, no. 18: 3567. https://doi.org/10.3390/en12183567
APA StyleLi, H., Zhang, B., Qiu, L., Chen, S., Yuan, J., & Luo, J. (2019). Advection-Based Coordinated Control for Wave-Energy Converter Array. Energies, 12(18), 3567. https://doi.org/10.3390/en12183567