1. Introduction
Frequency stability is significant in the stable and safe operation of power systems, reflecting the fundamental position of power systems in generation and demand. An imbalance could lead to continual deviation of the system frequency. Nowadays, small-scale power systems known as microgrids are quickly developed due to their main advantages, such as simple integration of distributed renewable energy sources (RESs), feasibility, and resiliency in power system operation. The utilization of RESs would result in critical consequences for the safety operations of microgrids. The bulk replacement of conventional generations (based on synchronous generators) by RESs could create new stability threats to the systems, resulting in the degradation of system performance and stability. Firstly, RESs-based generations are connected to the microgrids via power electronic interfaces (converters/inverters), which could not generate the inertia property, resulting in a significant reduction of the whole system inertia. The inertia property plays a significant task in slowing down the frequency deviations during a disturbance, which could help in controlling system frequency stability and damping; thus, the frequency deviation and oscillatory will be critically affected [
1]. An excessive frequency deviation may occur, resulting in undesirable load-shedding, cascading outages, or even wide-area power blackouts. Secondly, the rate of change of frequency (ROCOF) of microgrids is significantly increased due to high RESs integration. High ROCOF exposure makes the generation units prone to pole-slipping, resulting in protective tripping [
2].
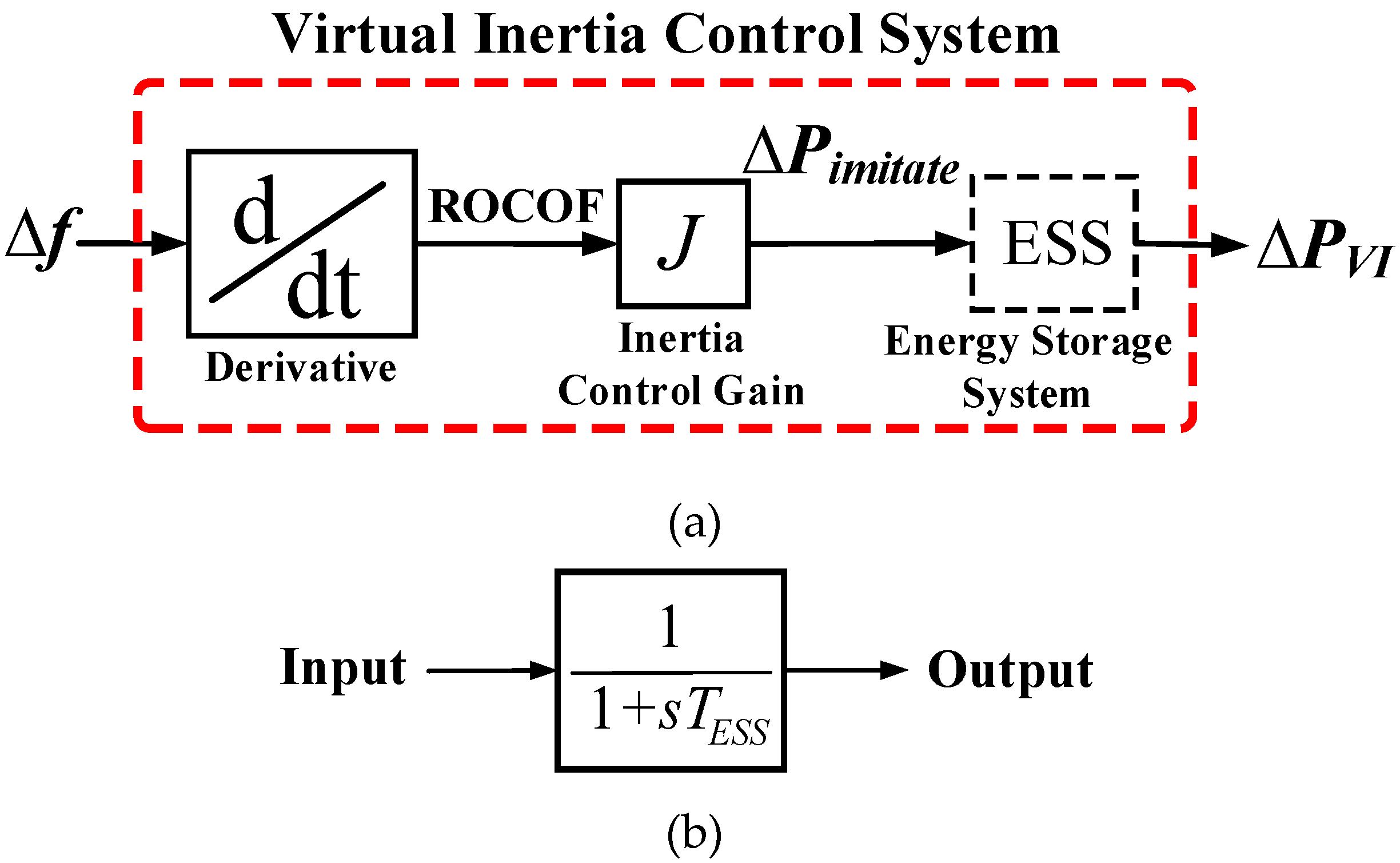
To overcome these new stability threats, one straightforward solution is the development of auxiliary control, usually named virtual inertia control or virtual synchronous generator (VSG), which imitates the behavior of actual synchronous generators without using prime movers or rotating mass, tackling stability issues [
1,
2,
3,
4,
5,
6]. Such control system could be established with an energy storage system (ESS) and inverter. Consequently, the additional inertia power could be virtually imitated to the microgrid during RESs penetration, enhancing system inertia, frequency stability, and resiliency. Previous research achievements on virtual inertia control and its application are discussed in References [
7,
8], including literature reviews. In [
9,
10], it was verified that virtual inertia control applications could effectively offer uninterrupted power transfer to the grid-connected and isolated modes during the RESs penetration, enhancing overall microgrid stability and resiliency.
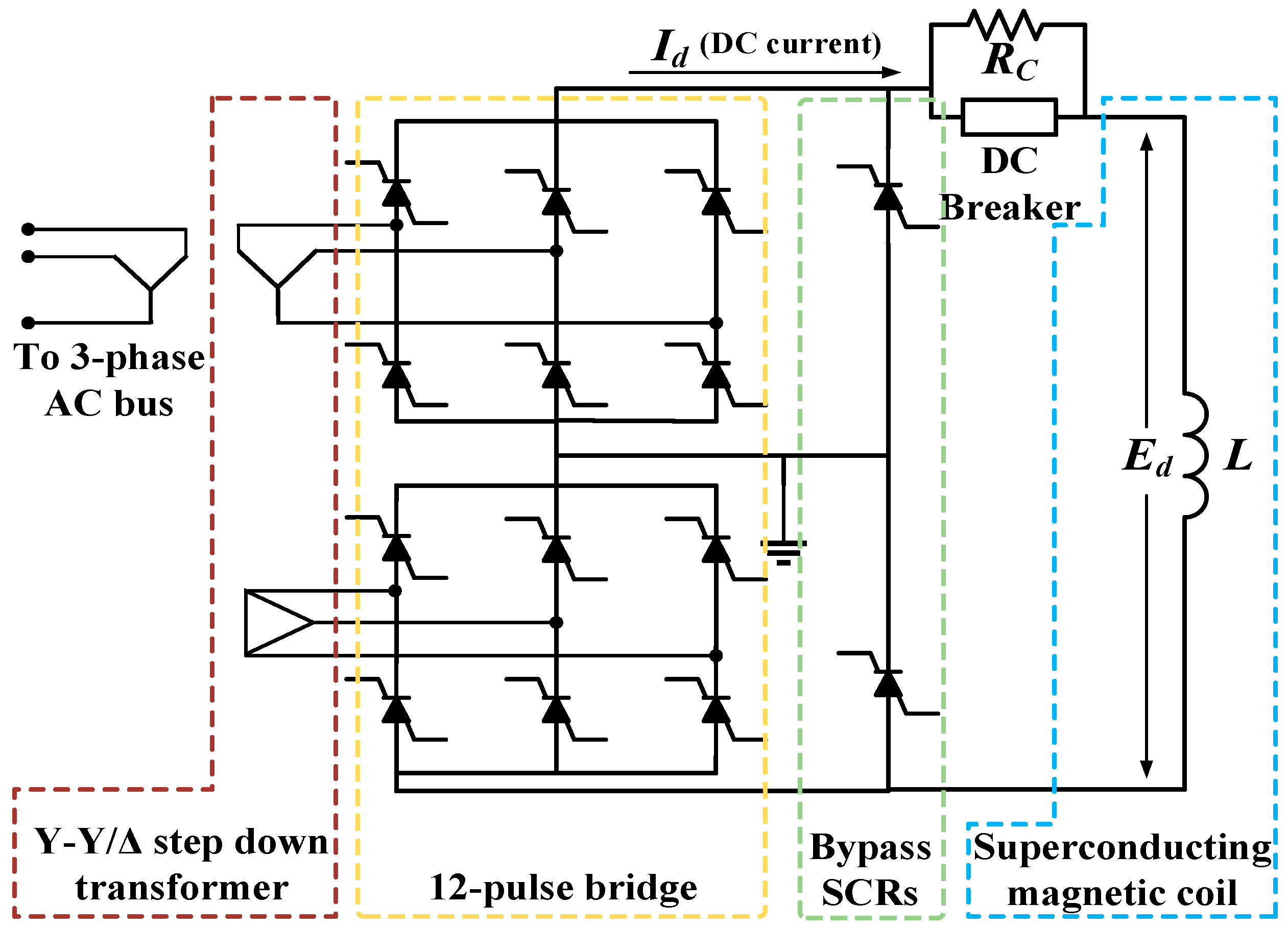
To maintain stable and robust inertia emulation/control capabilities, the microgrid relies inevitably on stabilizing devices (i.e., ESS). The ESS devices may not deliver enough power for a short period of time, leading to insufficient inertia power. This effect can cause system instability, cascading outages, and partial or complete power blackouts. Moreover, the high RESs penetration in microgrids might have adverse effects on the virtual inertia control performance and stability. Considering such drawbacks, the superconducting magnetic energy storage (SMES) technology is among ESS choices due to its major advantages of fast response, high efficiency, high energy/power, and unlimited number of charging/discharging cycles [
11,
12]. The main advantage of SMES is that it can discharge large amounts of power in a short period of time. Especially, to react to the sudden changes in microgrid dynamics, an active power source with fast-response capability such as a SMES unit is expected to be the most effective countermeasure. The feasibility of SMES for enhancing power system dynamic problems (voltage/frequency stability) has been reported [
11,
13,
14,
15,
16]. Various works [
17,
18,
19,
20] further used the SMES for power system transient stability improvement. Based on a literature survey in regard to SMES technology, there were no conclusive studies on the utilization of virtual inertia control topology using SMES technology for microgrid frequency enhancement.
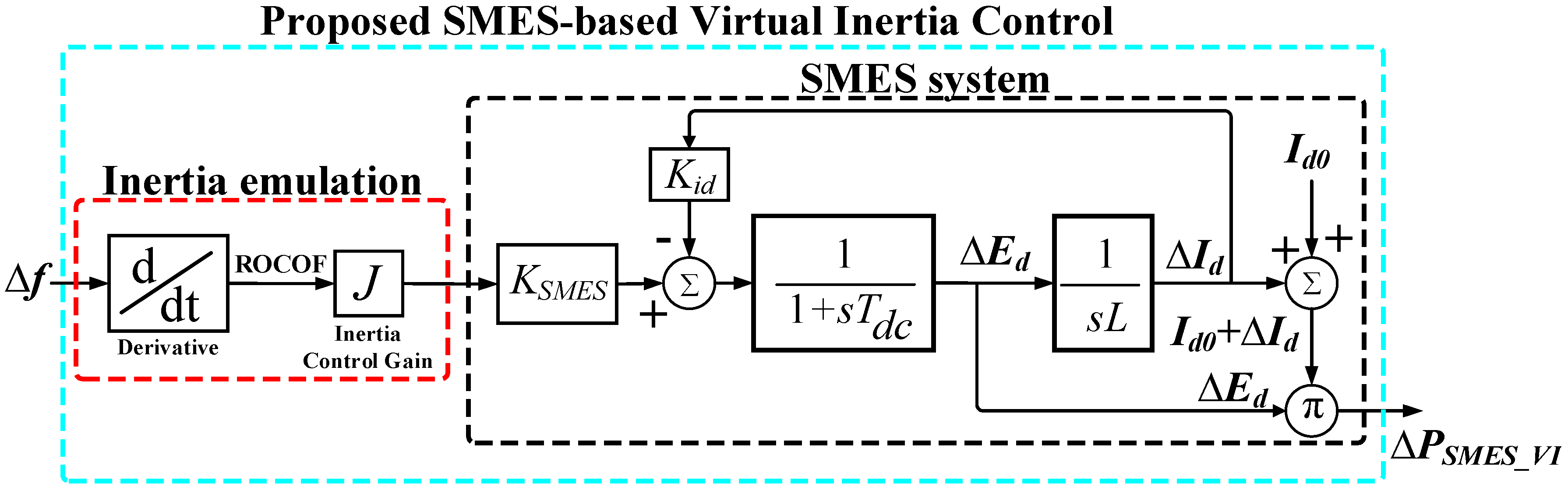
In an attempt to address the aforementioned limitations, this is the first study proposing the coordinated design of virtual inertia control topology based on SMES technology to improve microgrid stability and resiliency. The SMES-based virtual inertia control system is implemented in the studied microgrid with RESs to emulate sufficient inertia power and maintain robust system frequency stability, avoiding system instability, cascading outages, and wide-area power blackouts. The simulation studies were performed under a MATLAB/Simulink
® 2019 environment. To evaluate the efficacy and robustness of the proposed control method, the obtained results were compared with conventional ESS-based virtual inertia control in References [
2,
3,
4,
5,
6,
21].
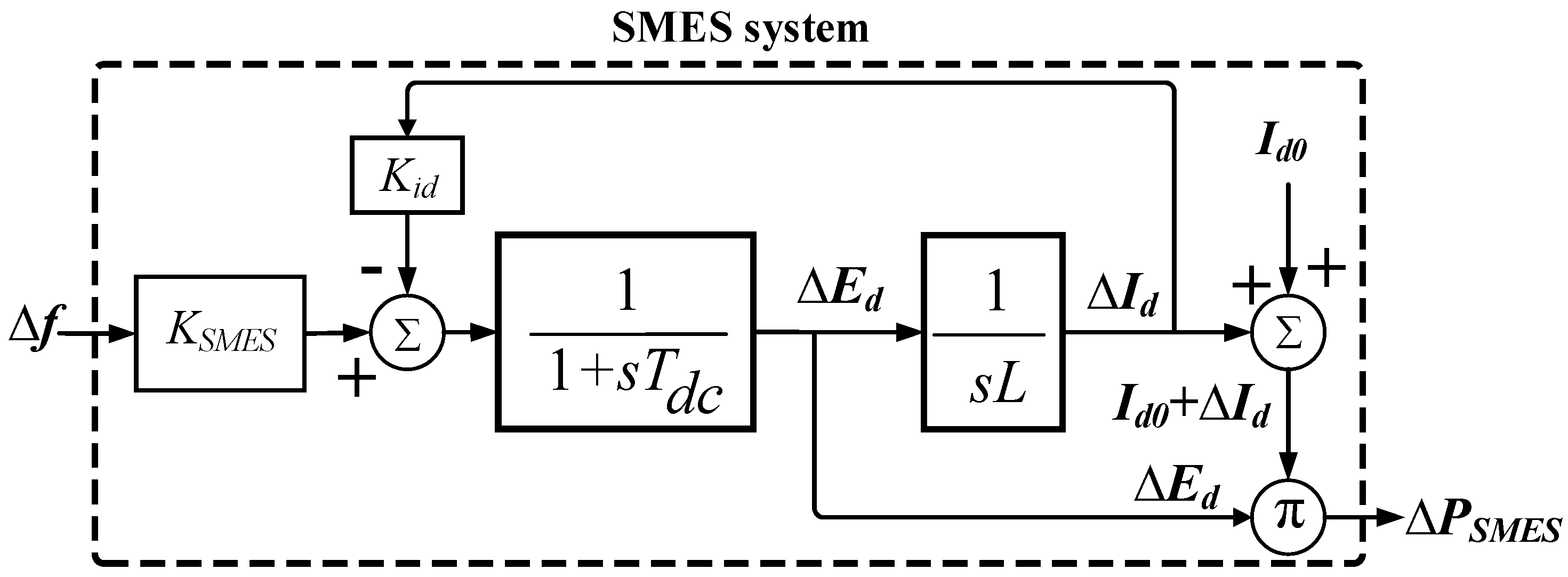
The main contributions of this paper over the existing virtual inertia control techniques are as follows: (1) this is the first paper that proposes an explicit model of the SMES system that can capture the key dynamic characteristics of virtual inertia control topology for enhancing inertia emulation capability, improving frequency stability, and resiliency of the microgrid; (2) the dynamic effects of the proposed SMES-based virtual inertia control are analyzed and validated by the time domain simulation, evaluating a new trade-off between inertia response/emulation and short-term ESS power in regard to frequency stability improvement; (3) compared with the conventional ESS-based virtual inertia control in References [
2,
3,
4,
5,
6,
21], the proposed control strategy shows remarkable performance and stability in terms of high energy/power and fast response, resulting in the lowest frequency deviation and transient excursion. Thus, the lower and short-term power from the ESS could be solved, avoiding system instability, cascading outages, and wide-area power blackouts.
The organization of this paper is as follows.
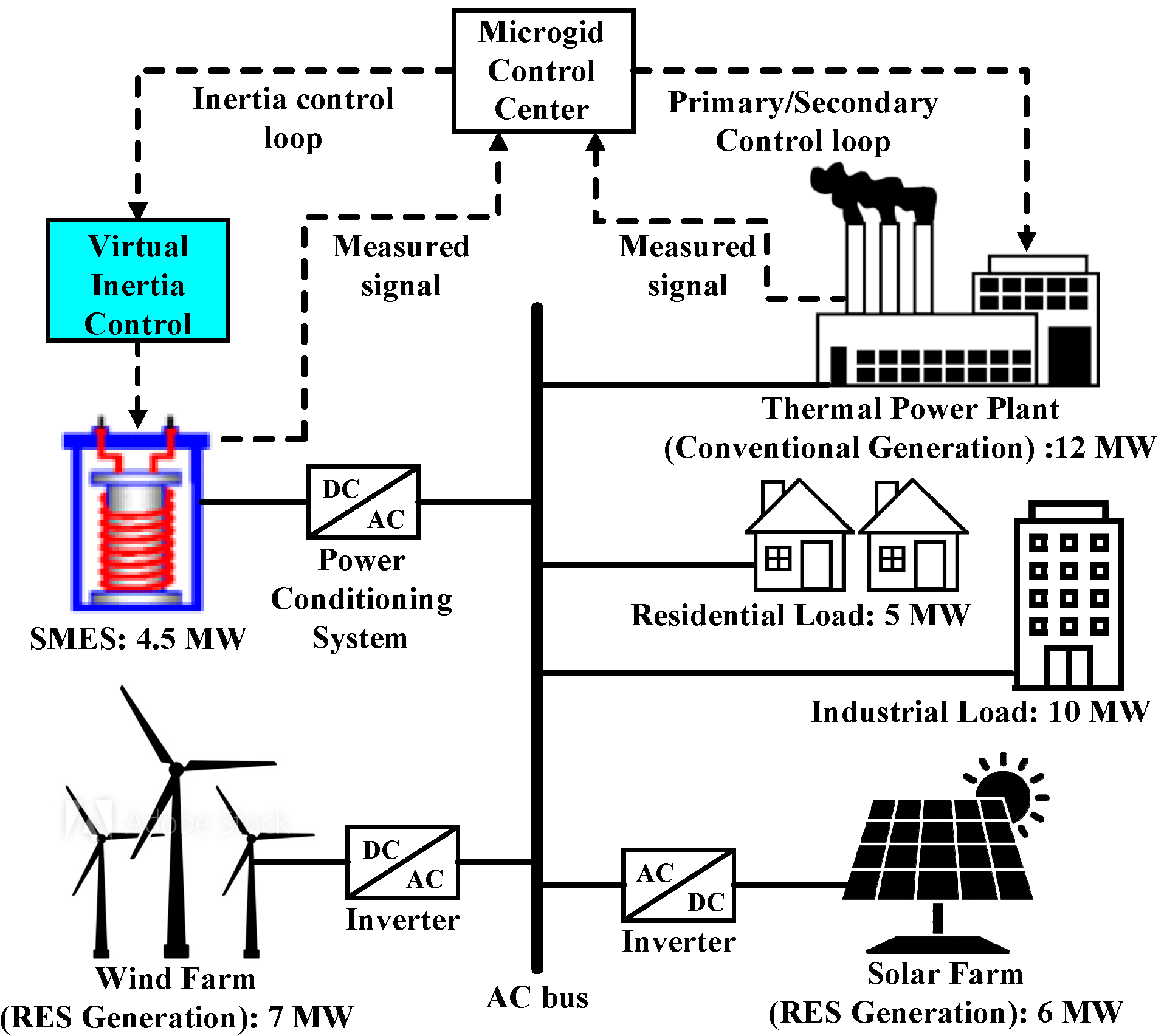
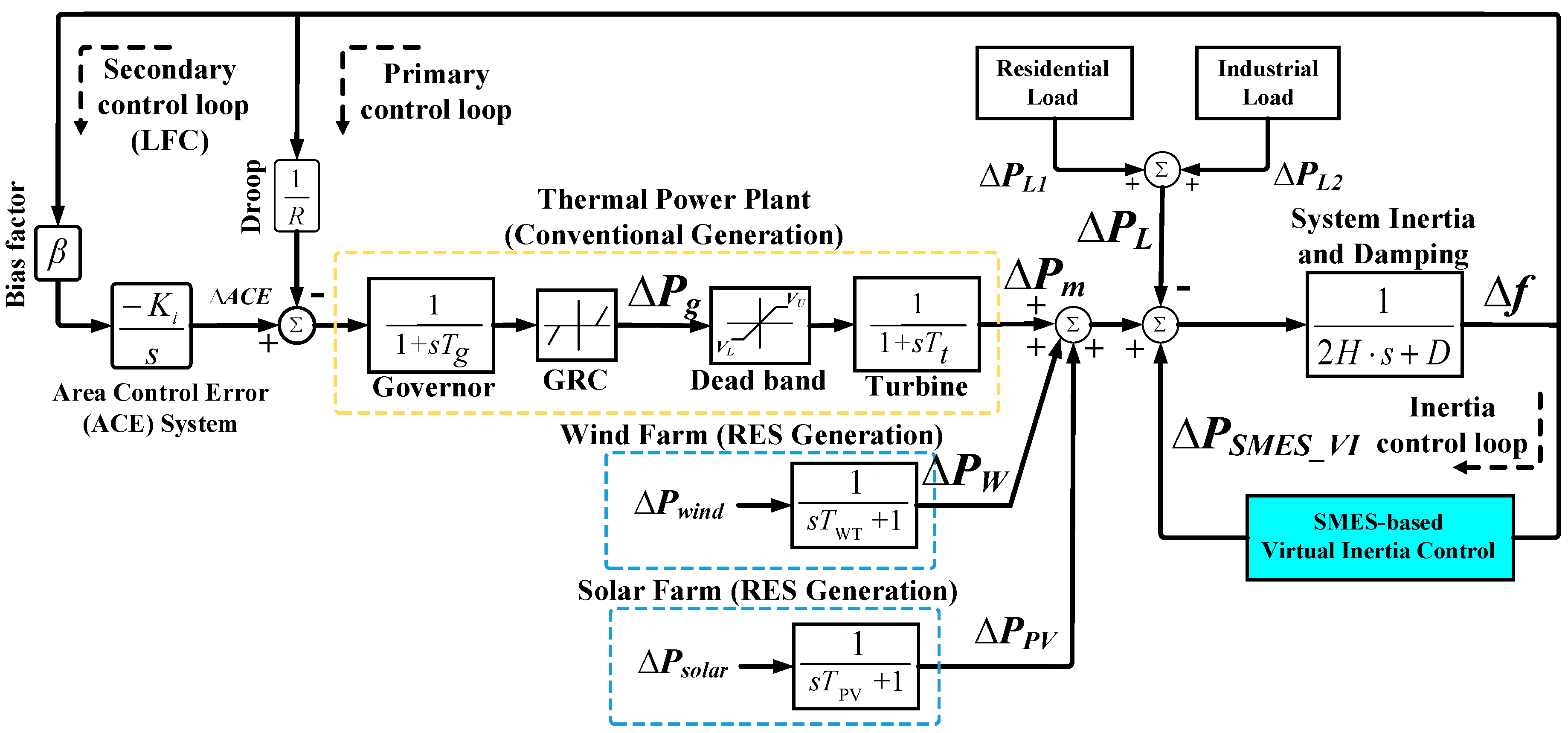
Section 2 demonstrates the system overview including microgrid modeling for a frequency stability study.
Section 3 proposes the control scheme of SMES-based virtual inertia control for frequency stability enhancement.
Section 4 describes the simulation results and analysis based on the time-domain.
Section 5 provides some conclusions in regard to this work.
4. Simulation Results and Discussion
To validate the robustness and efficacy of the proposed control technique, nonlinear simulations are established under the MATLAB
®/Simulink
® environment. Two contrastive severe scenarios with different integration levels of wind/solar farms, industrial/residential load patterns, and control parameters were performed for investigating microgrid frequency response. The results of the proposed SMES approach were compared with traditional ESS-based virtual inertia control presented in References [
2,
3,
4,
5,
6,
21]. To comply with the frequency operating standards (grid codes) of actual power systems (Nordic and AEMC) [
27], the acceptable ranges of frequency deviation used in this work are applied as ±1 Hz during the generation/load event, and as ±0.5 Hz during no contingency.
4.1. Stability Assessment under High Inertia Microgrid (Low RESs Penetration)
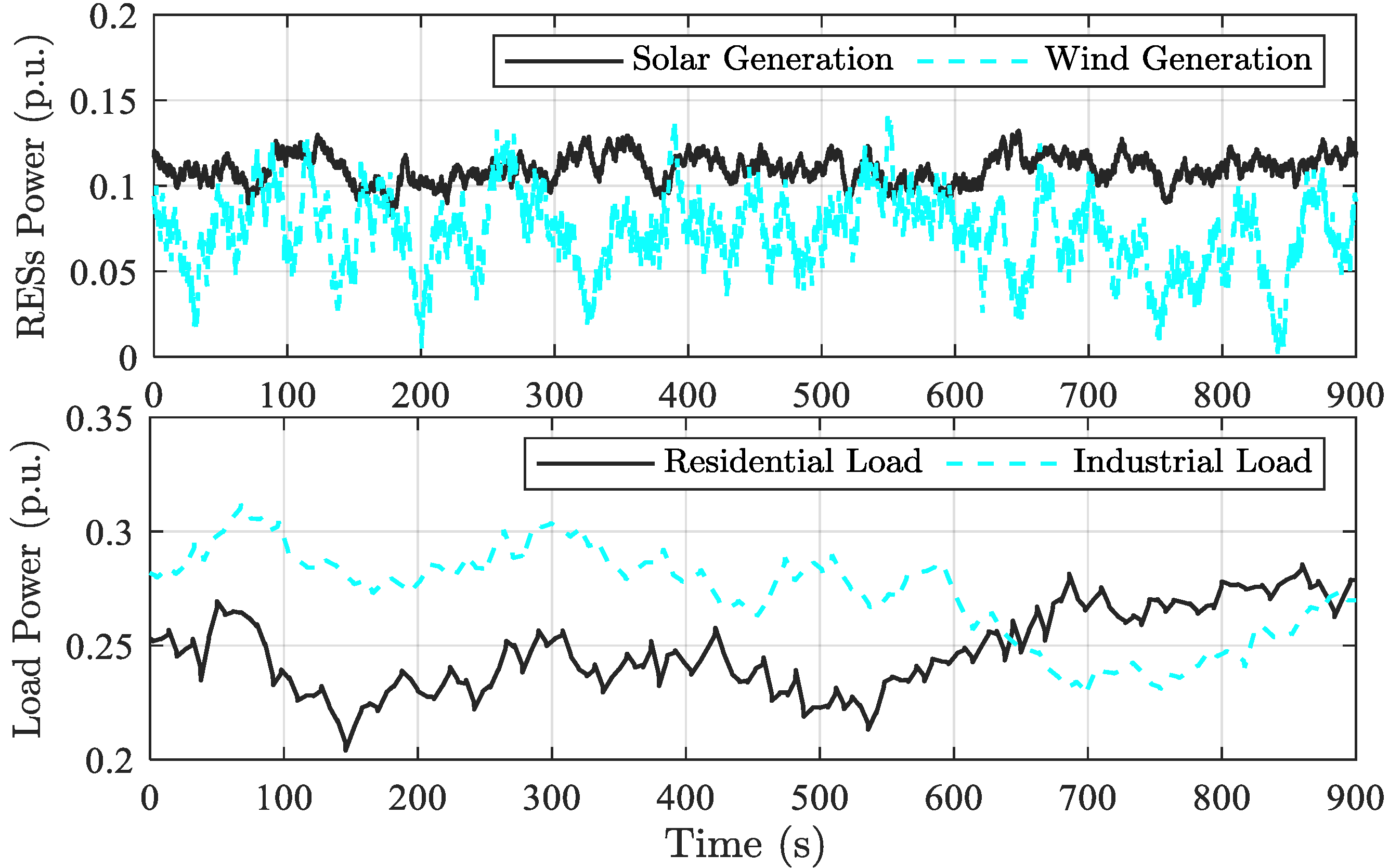
This scenario examines the microgrid frequency stability under the normal operating condition. In
Figure 7, the industrial and residential loads are operated at its heavy loading condition, resulting in high load damping. The RESs (wind and solar systems) are lightly penetrated into the microgrid, resulting in high system inertia (10% reduction from its nominal value).
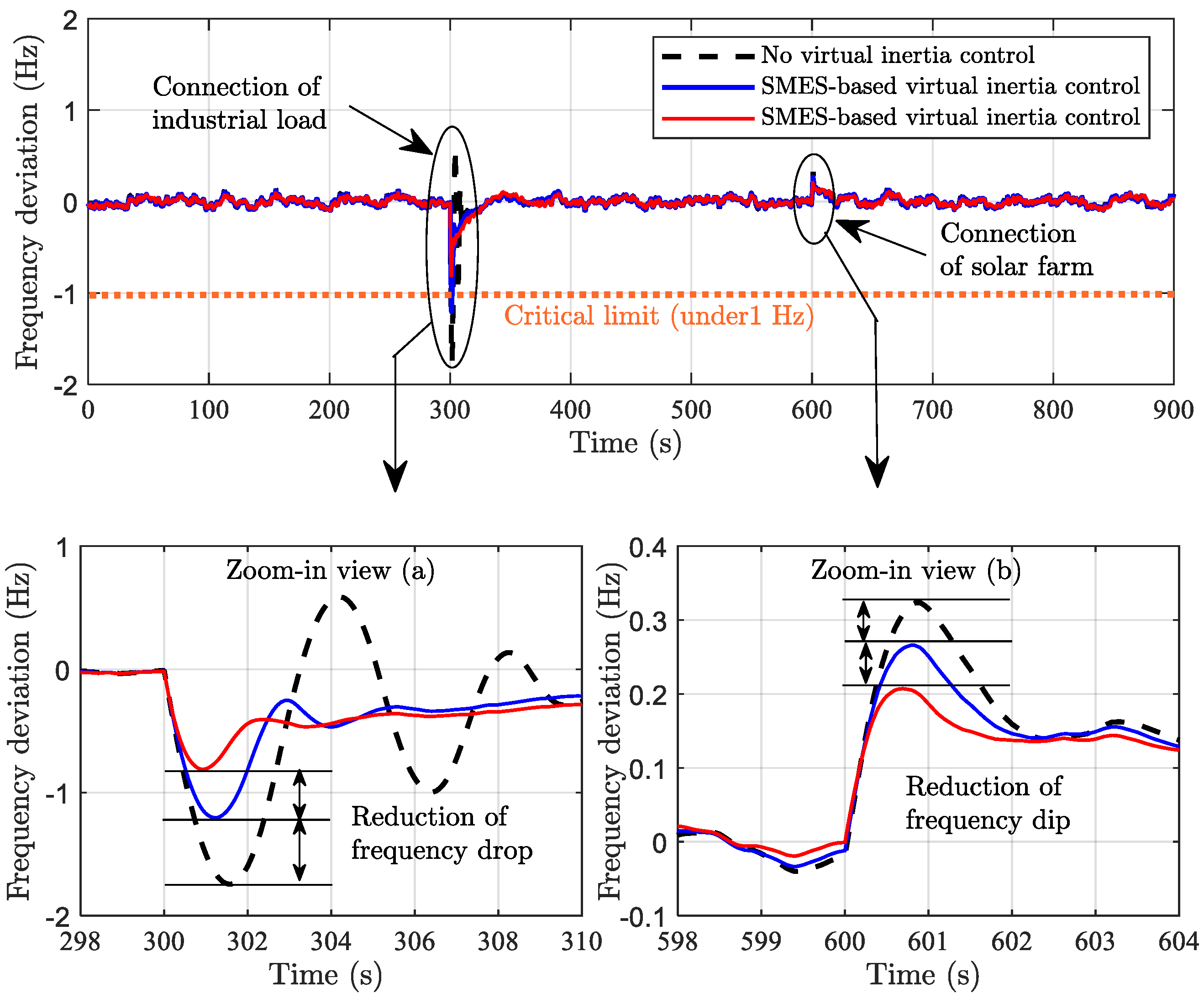
Figure 8 shows the microgrid frequency response under the normal operating condition (high system inertia). In cases of no virtual inertia control and traditional ESS-based virtual inertia control, there are large frequency drops of −1.8 Hz and −1.2 Hz, respectively, during the sudden integration of the industrial load (at 300 s). The amplitudes of the frequency drop exceed the allowable grid code limit (±1 Hz or ±100 mHz), causing deregulated microgrid stability. On the contrary, the proposed SMES-based virtual inertia control could properly compensate the sudden change, resulting in a lower frequency drop of −0.85 Hz. The proposed control method is able to suppress the oscillation quickly and maintain the frequency stability within the allowable grid codes. During the increasing penetration of solar farms (renewable energy) started from 600 s, there is a larger frequency rise (dip) of +0.32 Hz in the case of no virtual inertia control, and +0.28 Hz in the case of traditional ESS-based virtual inertia control. Obviously, the proposed SMES-based virtual inertia control could significantly enhance the performance of the ROCOF, resulting in the lowest frequency rise. The frequency rise is effectively suppressed by the proposed control with the lowest value of +0.19 Hz. Nevertheless, traditional ESS-based virtual inertia control yields a longer stabilizing time during the sudden changes in frequency (drop and dip) compared with the proposed control method. This scenario validates the efficacy of the proposed control method in regulating stable and reliable microgrid operation.
It is obvious that the transient performance of the system significantly improved in terms of peak deviation (dip/drop) and settling time in the presence of the SMES system.
Figure 9 illustrates that the SMES-based virtual inertia control can extract more inertia power by discharging than does traditional ESS-based virtual inertia control. Hence, the thermal unit (conventional generation) requires less power generation owing to the proposed control method.
4.2. Stability Assessment under Low Inertia Microgrid (High RESs Penetration)
This scenario examines the microgrid frequency stability under the severe operating condition. The robustness of the proposed control method is also investigated with utmost penetration of renewable energy and huge reduction of total system inertia. In
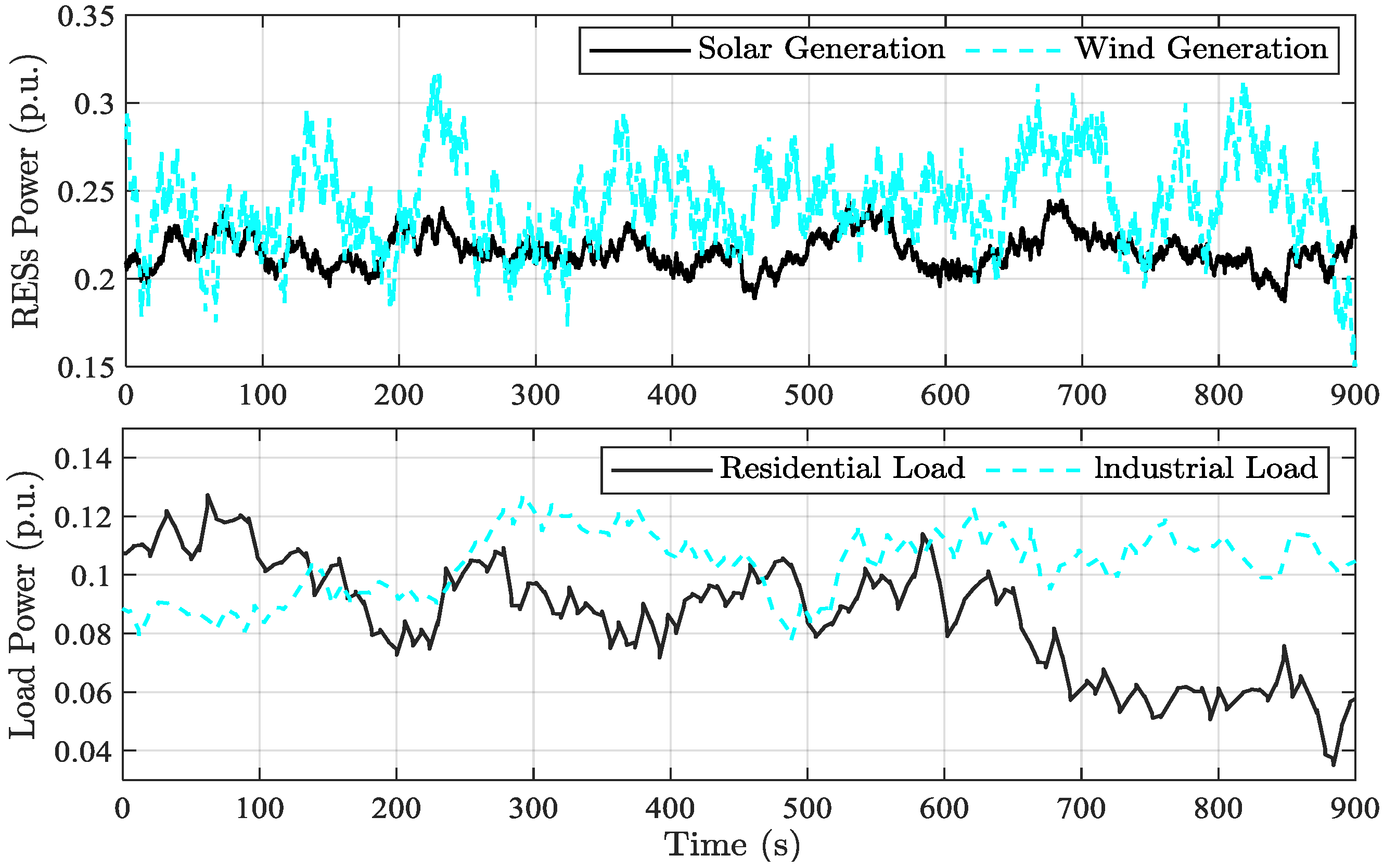
Figure 10, the wind and solar systems are highly penetrated into the microgrid, creating a huge reduction in system inertia (70% decrease from its nominal value). To conduct a more critical scenario, the industrial and residential loads are lightly operated at their partial demand, resulting in the critical condition of low load damping (50% decrease from its nominal value).
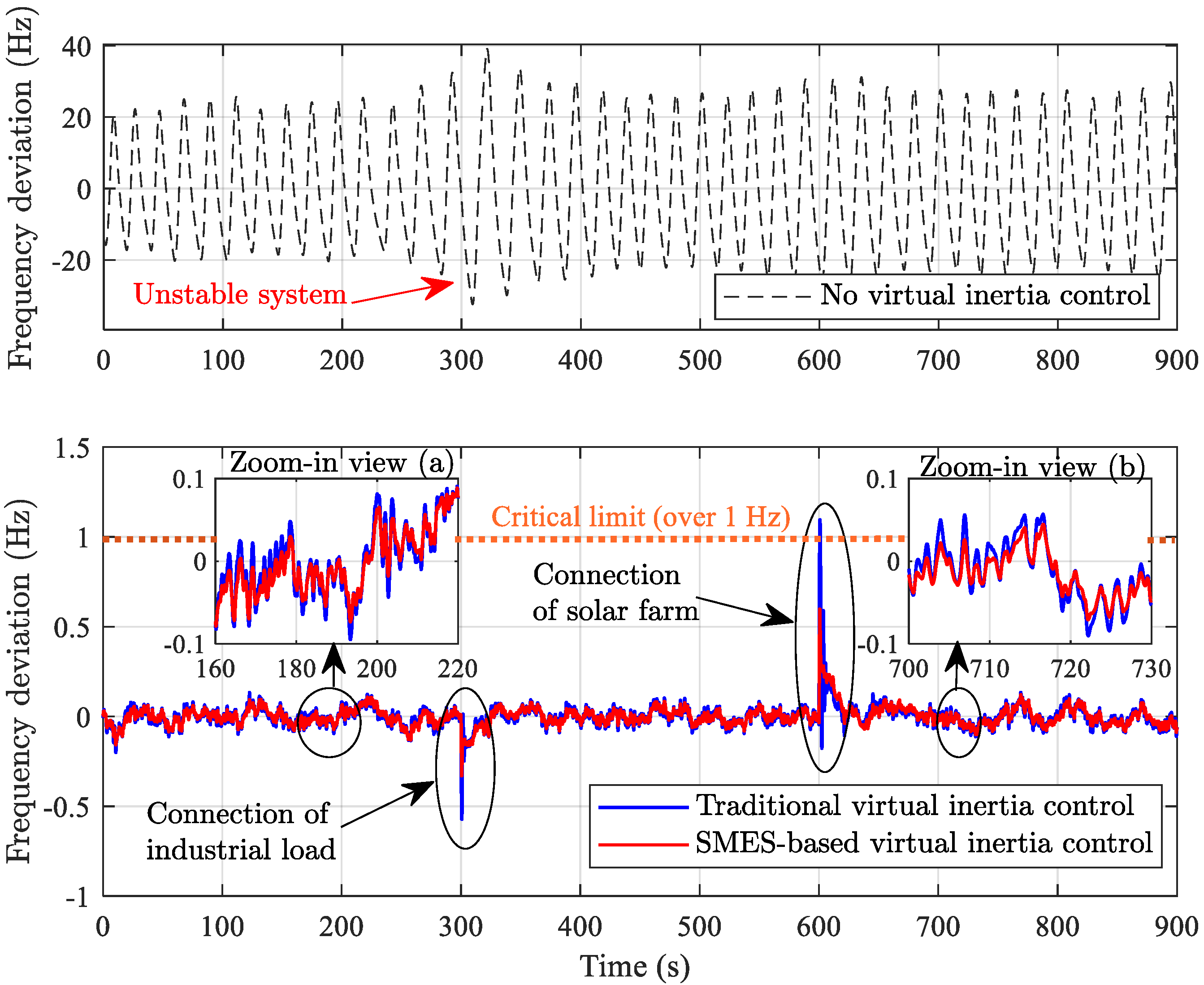
Figure 11 shows the microgrid frequency stability under the critical situation of low system inertia. Due to the huge reduction of system inertia driven by high renewable integration, the performance of ROCOF is critically deteriorated, resulting in higher ROCOF. Subsequently, the deviation of system frequency in all scenarios significantly increases. In the case of no virtual inertia control, the system frequency extremely fluctuates and loses the stabilizing effect due to the utmost renewable integration, resulting in an unstable system and wide-area power blackout. Clearly, the SMES-based virtual inertia control can robustly damp the frequency deviation within the allowable grid code, while the traditional ESS-based virtual control fails to stabilize the deviation within the limit during the instantaneous rising integration of solar energy (at 600 s). Due to the lack of/insufficient emulation of inertia power due to low power/energy of the ESS, the conventional ESS-based virtual inertia control yields a larger frequency dip and drop during the sudden changes of RESs/load integrations. In addition, the stabilizing effect of SMES-based virtual inertia control is much superior to traditional virtual inertia control. Clearly,
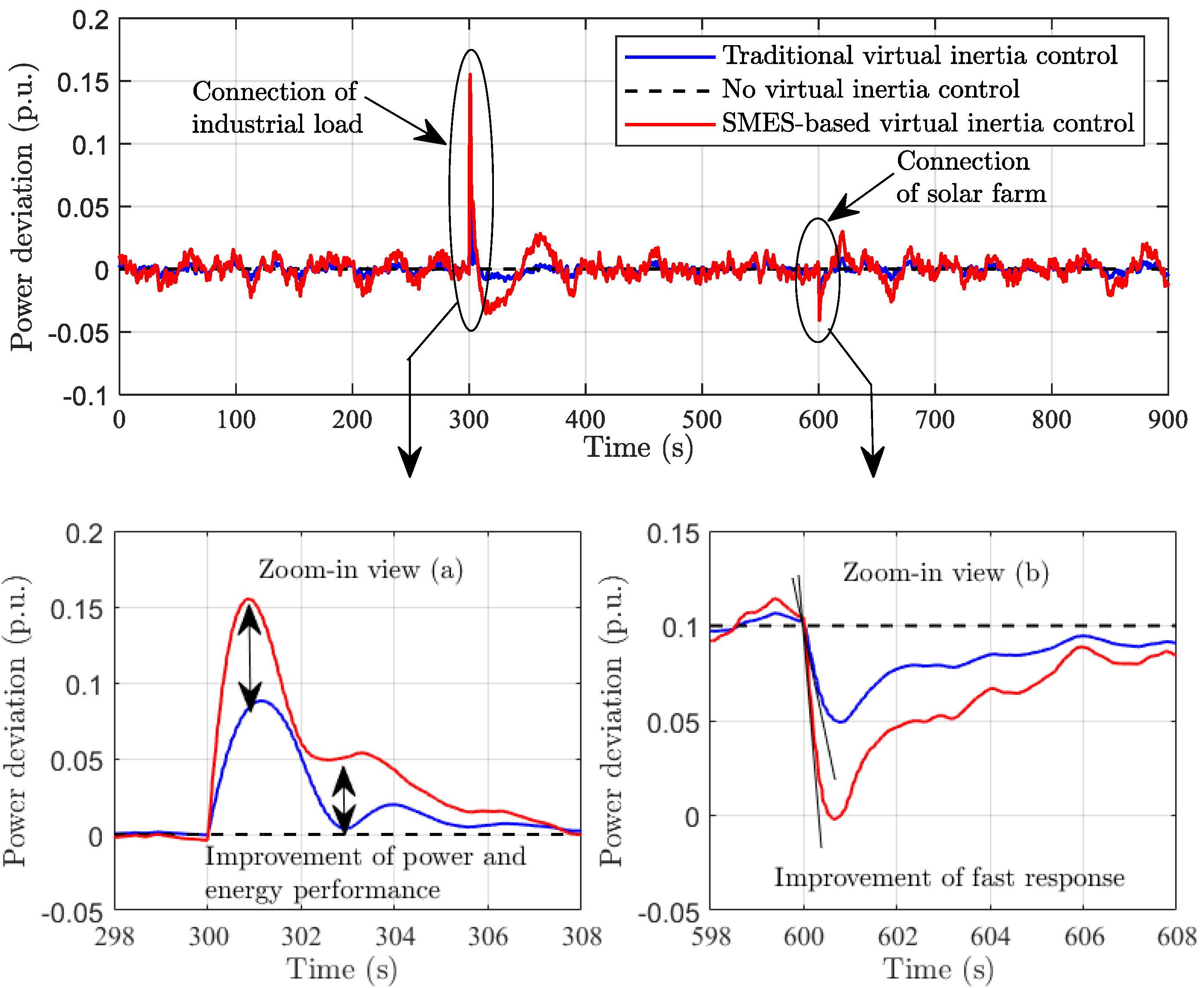
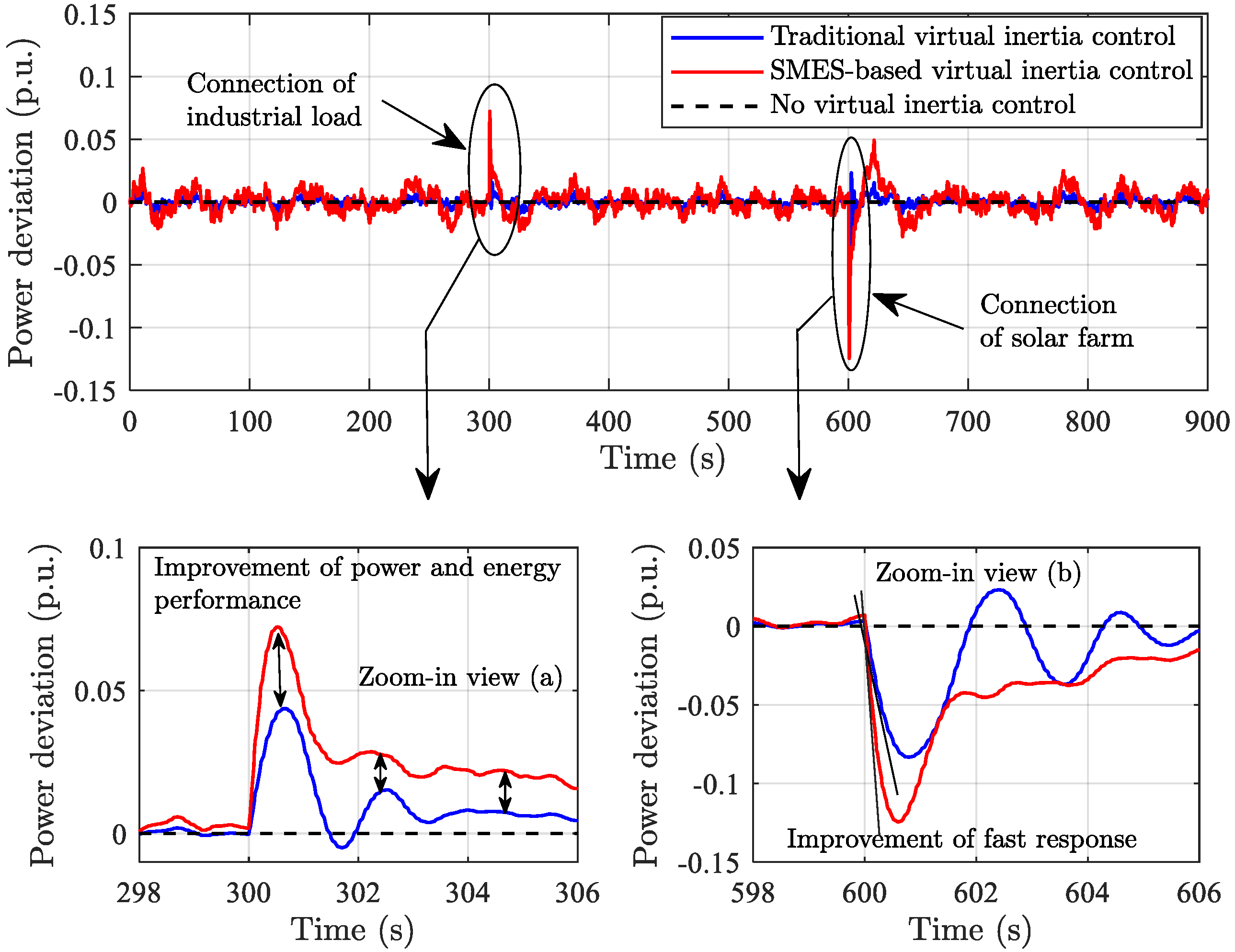
Figure 12 confirms that applying SMES-based virtual inertia control can significantly improve the inertia emulation capability in terms of high power/energy and fast response. Therefore, this scenario implies that the proposed SMES-based virtual inertia control is very robust against a wide range of microgrid operations, maintaining satisfying frequency stability even in extreme situations.
In summary, applying virtual inertia control topology into SMES system not only improves the inertia emulation capability but also reduces frequency oscillation and transient excursion, and shortens the stabilizing time, effectively enhancing the overall stability and robustness of the existing microgrid.
4.3. Stability Assessment under Low Inertia Microgrid Considering Time Delay Uncertianty
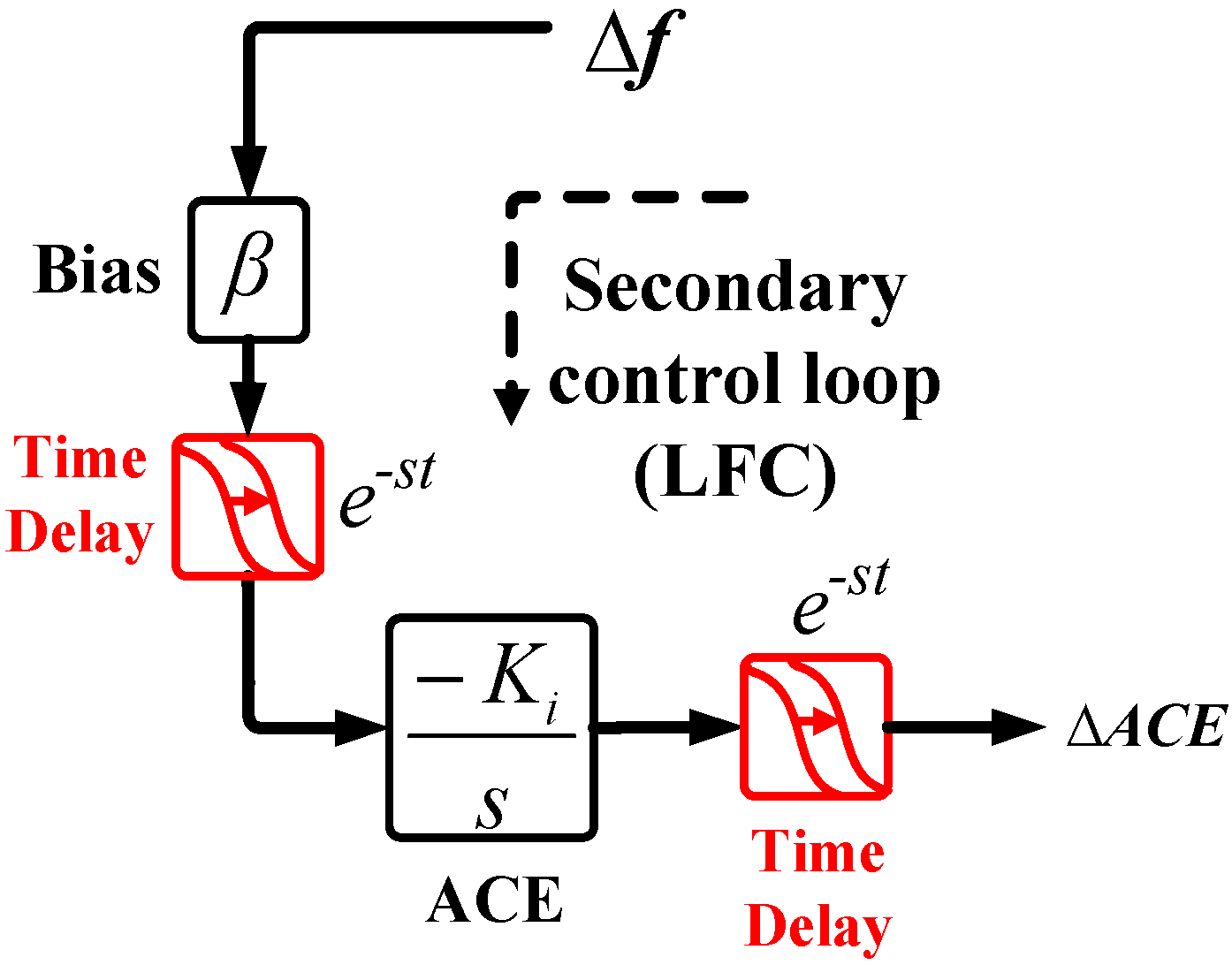
In real practice, rapid response and changing components of frequency are almost unobservable according to several filters and delays involved in the secondary control or load frequency control (LFC) process. Any signal filtering and processing introduces delays that should be considered [
23]. This issue also complies with the European Network of Transmission System Operators for Electricity (ENTSO-E) recommendations. Thus, communication delays in LFC analysis are becoming more important challenges due to the expanding, restricting of functionality, physical setups, and complexity of the existing microgrids. Such a delay effect could significantly lead to the degradation of microgrid stability and performance, especially under the situations of low inertia.
The time delays in secondary control mainly exist in the communication channels between the microgrid control center and operating stations, specifically on the measured frequency from the remote terminal units (RTUs) to the microgrid control center, and on the generated signal from the microgrid control center to individual generation units. The delay system is expressed by an exponential function
e−st, where t is the communication delay time. These delay systems are constructed as indicated in
Figure 13 and modified to the dynamic model of the microgrid in
Figure 2.
To investigate the robustness of the proposed SMES-based virtual inertia control approach, the severe operating conditions similar to Scenario 4.2 (i.e., high RESs and low loads) are implemented in this scenario while considering the communication delay effect. Typical filters and ACE signal use about 2 s or more for the data decision and acquisition cycles of the LFC [
23]. Thus, in this study, a communication delay time (t) of 3 s is applied to evaluate the robustness of the proposed control approach.
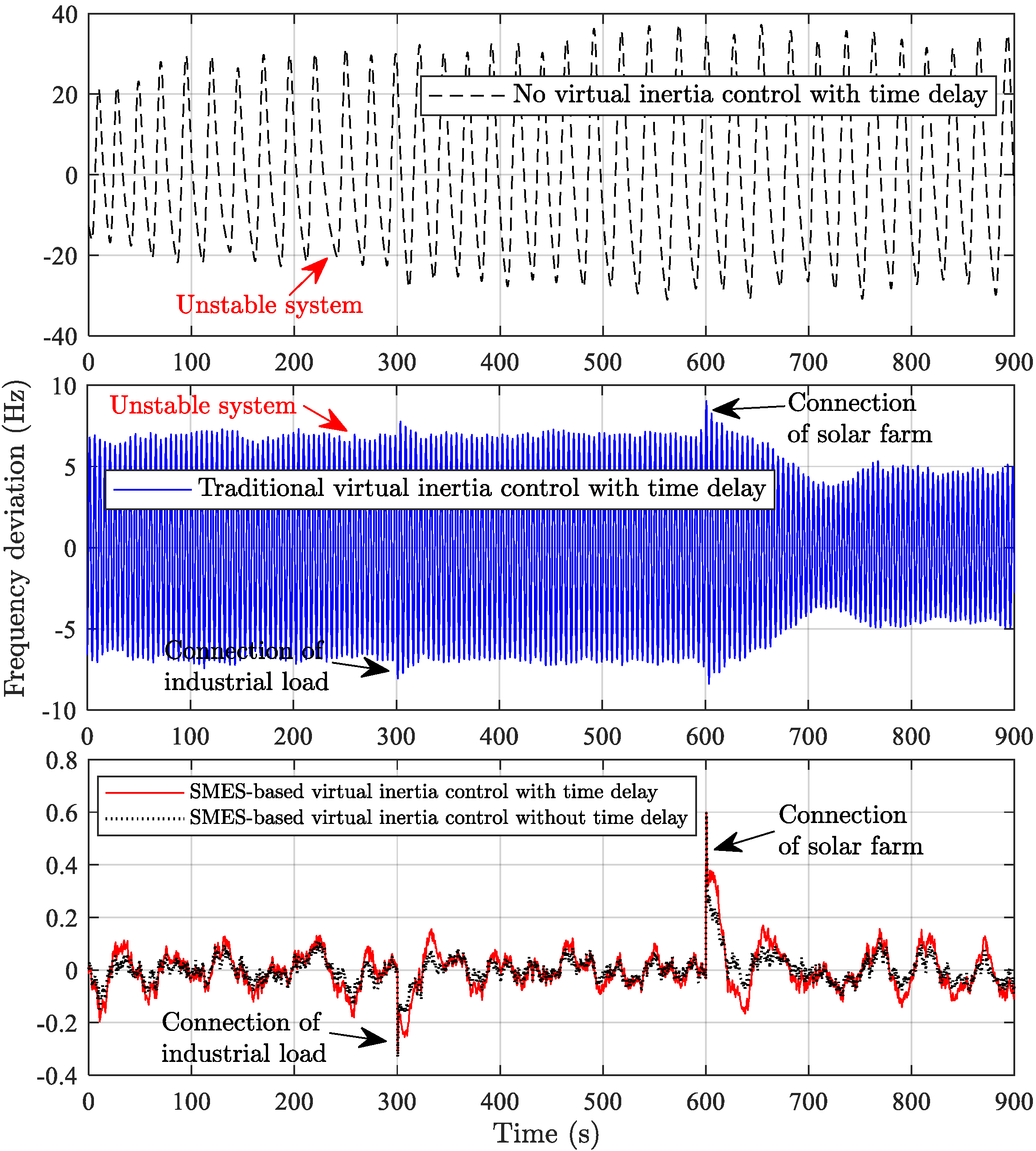
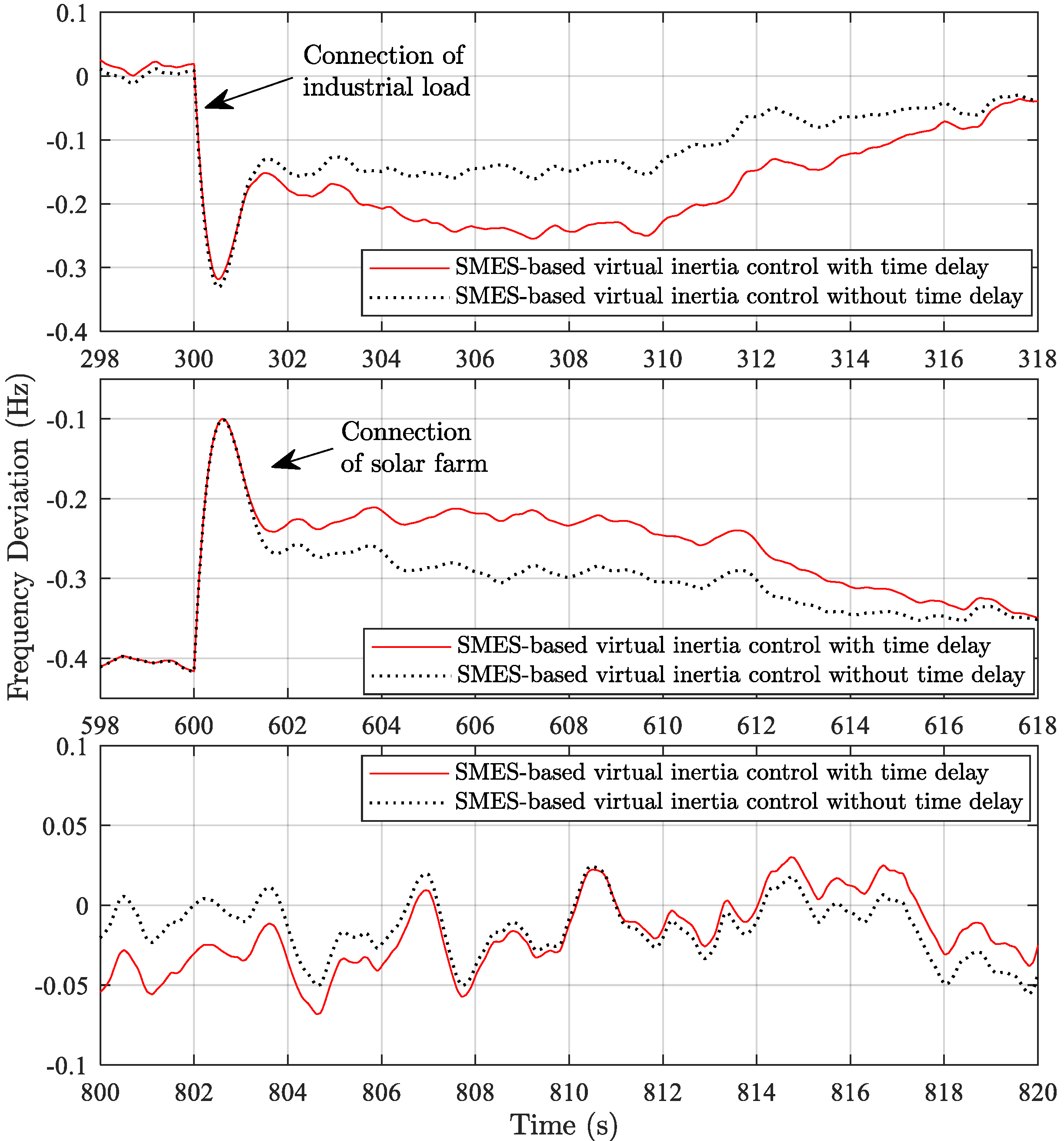
Figure 14 and
Figure 15 show the microgrid response under the severe situation of low system inertia with the time delay effect. Clearly, the introduction of time delays significantly reduces the efficacy and robustness of the microgrid frequency in all cases. Larger frequency transients and deviations could be evidently observed. In the case of no virtual inertia control, the system frequency completely leads to an unstable condition, resulting in system collapse and wide-area power blackouts. Traditional ESS-based virtual inertia control also fails to stabilize the system frequency, leading to system collapse and power blackouts. It is confirmed that the microgrid frequency stability and performance are reduced when time delay is applied. On the contrary, the proposed SMES-based virtual inertia control could provide remarkable performance and maintain frequency stability within the permittable limit of ±0.1 Hz, due to its high power with fast response. This implies the security and robustness of the proposed control approach.
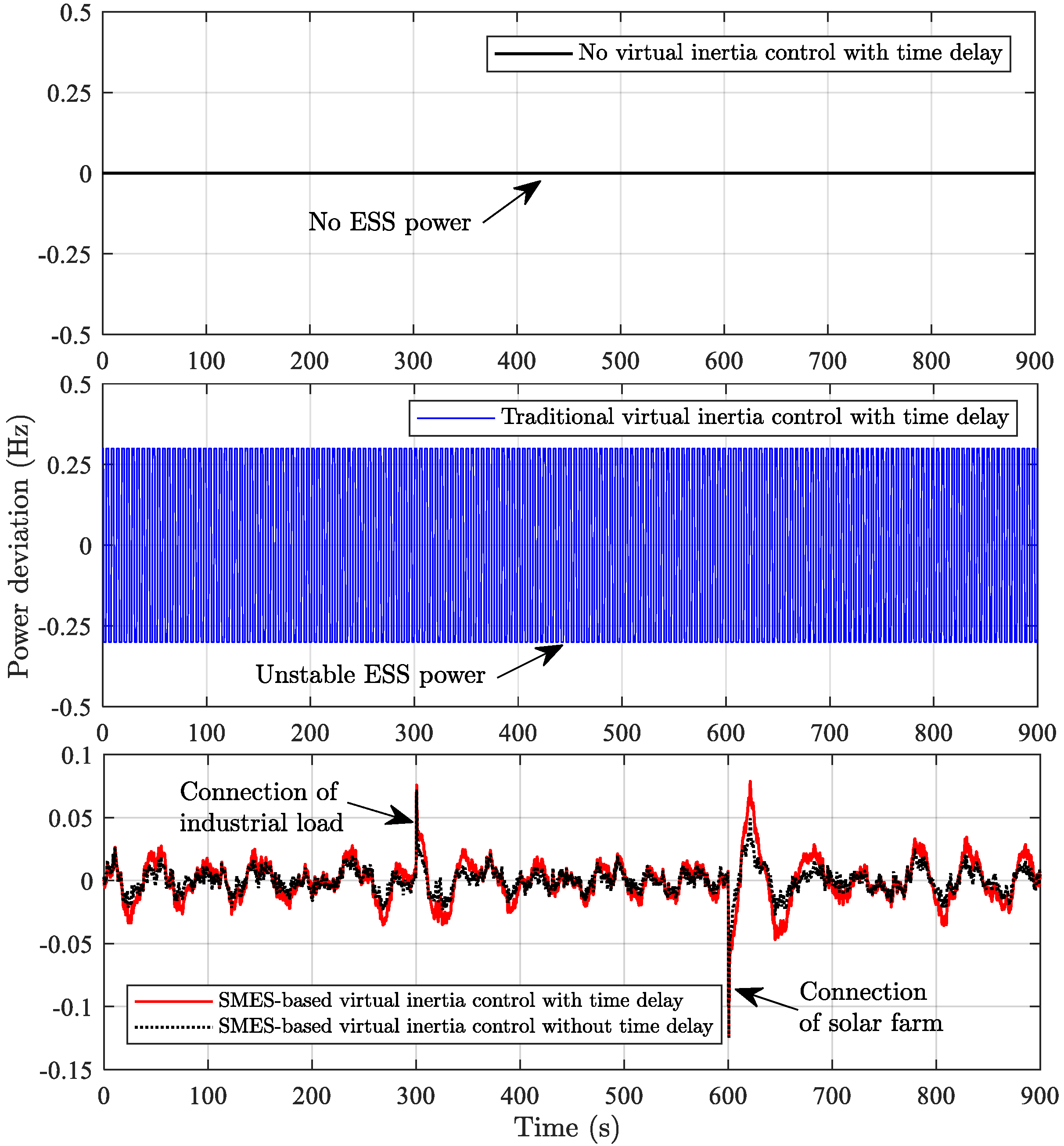
Figure 16 reveals the virtual inertia power response under the severe situation of low system inertia with time delay. Under the time delay effect, it is obvious that the inertia power in the case of traditional ESS-based virtual inertia control is in the critical unstable condition, reaching the ESS power capacity limit of ±0.3 p.u. This implies severe system instability, leading to system collapse. In the case of the proposed SMES-based virtual inertia control, more inertia power is required during the implementation of time delay to maintain the stable/robust frequency stability and performance within the permittable limit. Thus, it is confirmed that the effect of time delay can be suppressed by the proposed SMES-based virtual inertia control.
5. Conclusions
Considering inertia emulation capabilities, insufficient emulation of inertia power due to the lower and short-term power of storage systems could significantly lead to microgrid instability, cascading outages, and partial or complete power blackouts. To improve such capability, this paper applies a virtual inertia control topology to SMES technology. The study results indicate that SMES-based virtual inertia control provides better frequency performance and stability in terms of transient/peak deviation and settling time than traditional ESS-based virtual inertia control. This work shows the positive role of SMES in the improvement of inertia emulation and control against the high integration of RESs. It is obvious that applying virtual inertia control topology to SMES system not only improves the inertia emulation capability but also reduces frequency oscillation and transient excursion, and shortens the stabilizing time, effectively enhancing the overall stability and robustness of the existing microgrid. Hence, the proposed model and control technique will be important and useful for further analysis and studies of frequency stability/control with respect to virtual inertia emulation-based SMES capabilities. Additionally, the proposed collaboration technique can be expected as the smart stabilizing system in regard to inertia emulation for existing and future microgrids. This technique could be applied to any type of power systems with different characteristics, size, and complexity.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}