1. Introduction
Under the dual pressures of a deteriorating ecological environment and depleting fossil energy, investigations on the utilization of renewable energy have increasingly become a worldwide focus. The application of wind-power generation shows that it is one of the most mature, largest-scale renewable energy technologies with the prospect of commercial development [
1,
2]. In recent years, with the advancement of technology and the decline in costs, the size of the global offshore wind power market has expanded rapidly. According to the data released by the World Forum Offshore Wind, the capacity of the global offshore wind energy installed in 2018 was 4496 MW, and the total capacity of offshore wind power installed by the end of 2018 increased to 23,356 MW [
3].
The bucket foundation is one of the foundation types used in recent years for offshore wind-power development.
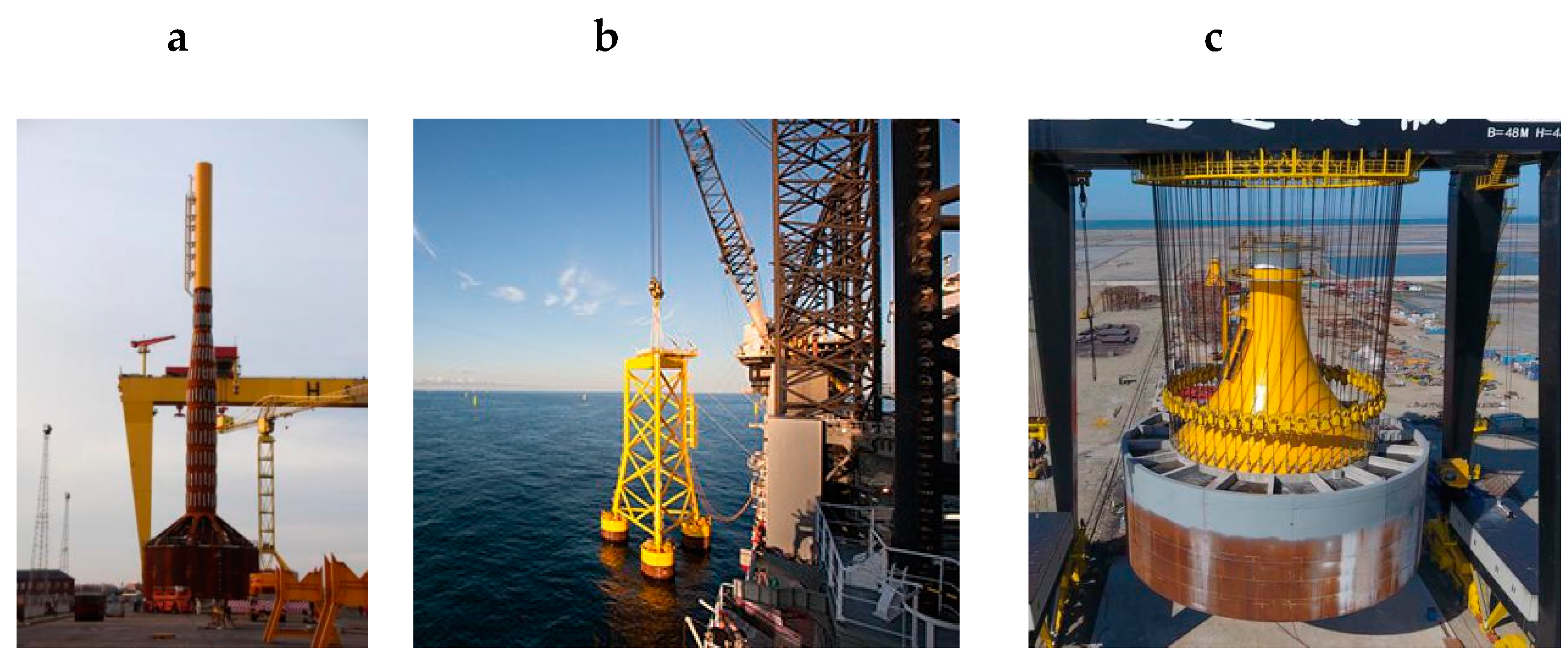
Figure 1 shows the three main types of bucket foundation that have been applied in the engineering practices of offshore wind turbines (OWT) [
4,
5,
6,
7,
8,
9]. The mono-bucket foundation (e.g., developed by the Universal Foundation) was applied to the Frederikshavn wind farm in Denmark in 2002, used as the foundations of the meteorological mast at the Horns Rev2 in Denmark in March 2009, and the Dogger Bank in UK in September 2012. The suction bucket jacket (SBJ) ( e.g., developed by DONG Energy) was installed at the Borkum Riffgrund 1 offshore wind farm in Germany in October 2014.. The mono-bucket with multi-compartments (e.g., jointly developed by Tianjin University and Daoda Company) was installed in Qidong city, i.e., the composite bucket foundation (CBF) was used with one-step transportation and installation technology in Sanxia Xiangshui and Dafeng offshore wind farm in China.
For the mono-bucket foundation with several compartments or multi-bucket foundation, the air-floating technology can transport the structure from the dock to the construction site. It is one of the key technologies for the cost-effective development of the bucket foundation for OWT, as shown in
Figure 2. The key scientific issues related to the process of air-floating are the interaction between marine environment, construction loads, and the structure. As a result of the open bottom and air compressibility, the air-floating characteristics and mechanics of bucket foundation are different from those of the conventional rigid bottom float. The ordinary floating body is equivalent to a structure with a foundation supported on a water-spring. On the other hand, the bucket foundation is equivalent to a structure with a flexible foundation supported on a series of springs coupled by the compressible air-spring and water-spring [
10,
11,
12,
13,
14,
15,
16]. Therefore, to predict the air-floating performance of the bucket foundations accurately, it is inappropriate to use the same parameters and calculation methods that are used in predicting the hydrodynamic performance and response of traditional rigid-bottom platforms or ship structures.
In recent years, the investigations on the air cushion-supported structures mainly focused on the hydrostatic and hydrodynamic characteristics of the structures. In the hydrostatic aspect, based on the perfect air law, Seidl (1980) introduced an air-pocket factor to describe the relationship between the compressibility of the trapped air and the resulting hydro-static stiffness of the system [
17]. For the conventional rigid bottom float, the added mass coefficients of the structure in heaving and rocking movements are suggested to be 1.2, if they cannot be determined from measurement [
18,
19]. By considering the air-floating structure as a single freedom rigid body and spring system, Bie et al. (2002) developed an air-floating reducing coefficient which can account for the difference in the restoring force coefficient between the air-floating structures and the conventional buoy. The basic mass in the motion equation should include both the mass of the structure and the mass of water plug inside the buoy, in which the added mass coefficient of heaving is 1.2 [
10]. Thiagarajan et al. (2004) demonstrated that introducing air cushion support into a concrete gravity structure (CGS) increases the pitch response, while having little effect on the heaving motion [
15]. Chenu et al. (2004) experimentally studied the effect of water plug height and compartmentalization of an air cushion on the metacentric height, heave and pitch natural frequency and the added mass of an air cushion-supported box model. The results showed that the air cushion reduced the stability of the vessel and influenced both the natural frequency and the added mass in heaving and pitching [
20]. Thiagarajan (2009) developed a correction formula for the metacentric height that incorporated the net effect of the air cushion on the static stability of a compartmented structure [
21]. Kessel (2010) presented a non-dimensional parameter which considers the compressibility factor of the air cushion. The parameter can be used to correct the heave-, roll- and pitch-restoring coefficients [
22].
In the hydrodynamic aspect, using the three-dimensional diffraction-radiation theory, Pinkster et al. studied the motion of the structures both partially and completely supported by air cushions in waves [
23,
24,
25]. The results are in good agreement with those of the Tabeta’s model test [
26]. Malenica and Zalar (2000) extended Pinkster’s method and calculated and analyzed the hydrodynamic coefficients of the heaving motion of an air cushion support structure [
27]. Using a boundary integral equation method, Gueret and Hermans (2001) extended Malenica’s and Zalar’s work and analyzed the hydrodynamic coefficients and internal free surface changes of an air cushion supported structure at zero-speed in regular waves [
28]. Using the three-dimensional potential flow theory and the linearized adiabatic law, Kessel and Pinkster calculated the motion responses and wave loads of a rectangular barge with partial buoyancy provided by an air cushion in waves. The effects of different form of subdivision on the motions and loads of the structure were investigated by comparing them with the results of the model tests [
29,
30]. Using a 1/20-scale physical model and the hydrodynamic software MOSES, Le et al. (2013) experimentally investigated the influence of towing speed, water depth, free-board height and wave direction on the air-floating towing behaviors of a multi-bucket foundation platform [
31]. Using MOSES, Zhang et al. (2013) studied the hydrodynamic motion of self-floating towing for a large prestressed concrete bucket foundation (LPCBF). The results showed that the hydrodynamic responses of the large floater with air cushion depended not only on the wave conditions but also on the mass of the water column, the height of the air cushion, and the air-pressure distribution [
16]. Using MOSES and physical model experiments, Zhang et al. (2015) described a one-step integrated transportation and installation technique to minimize the offshore operation and maximize the proportion of work carried out onshore with the benefits in terms of cost, quality and safety, and the dynamic and kinematic characteristics for the transportation system with different drafts and air pressures in the bucket. The results showed that a smaller draft and a larger air cushion contribute to a safe transportation process [
8].
OWTs with a large power rate should be installed in deeper water of more than 20 m and subjected to strong horizontal and moment loads by the wind, wave, and current [
32,
33,
34,
35,
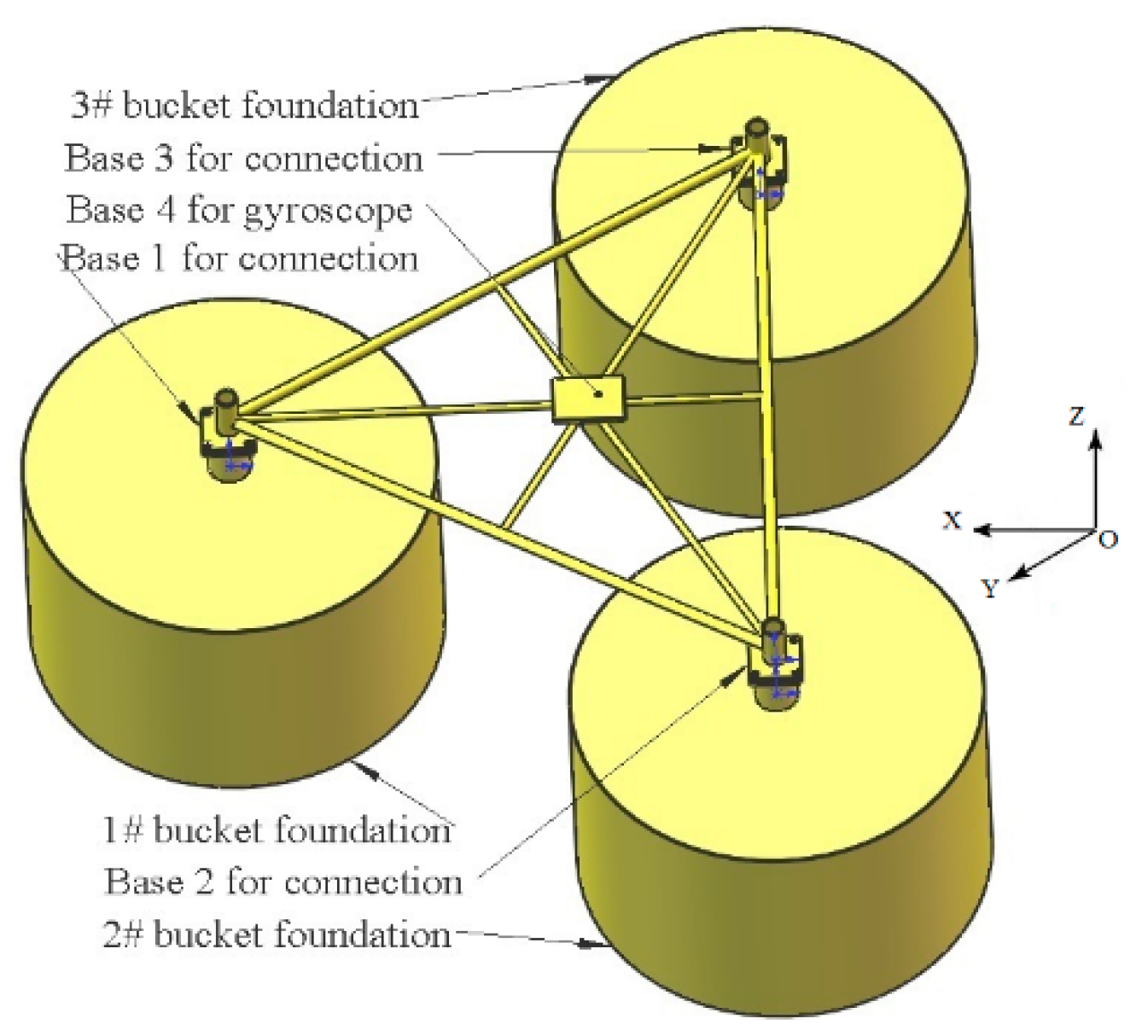
36]. Multi-bucket foundations combining several bucket foundations in a regular polygon shape are a potential alternative foundation to improve the bearing capacities of foundations for OWTs [
4,
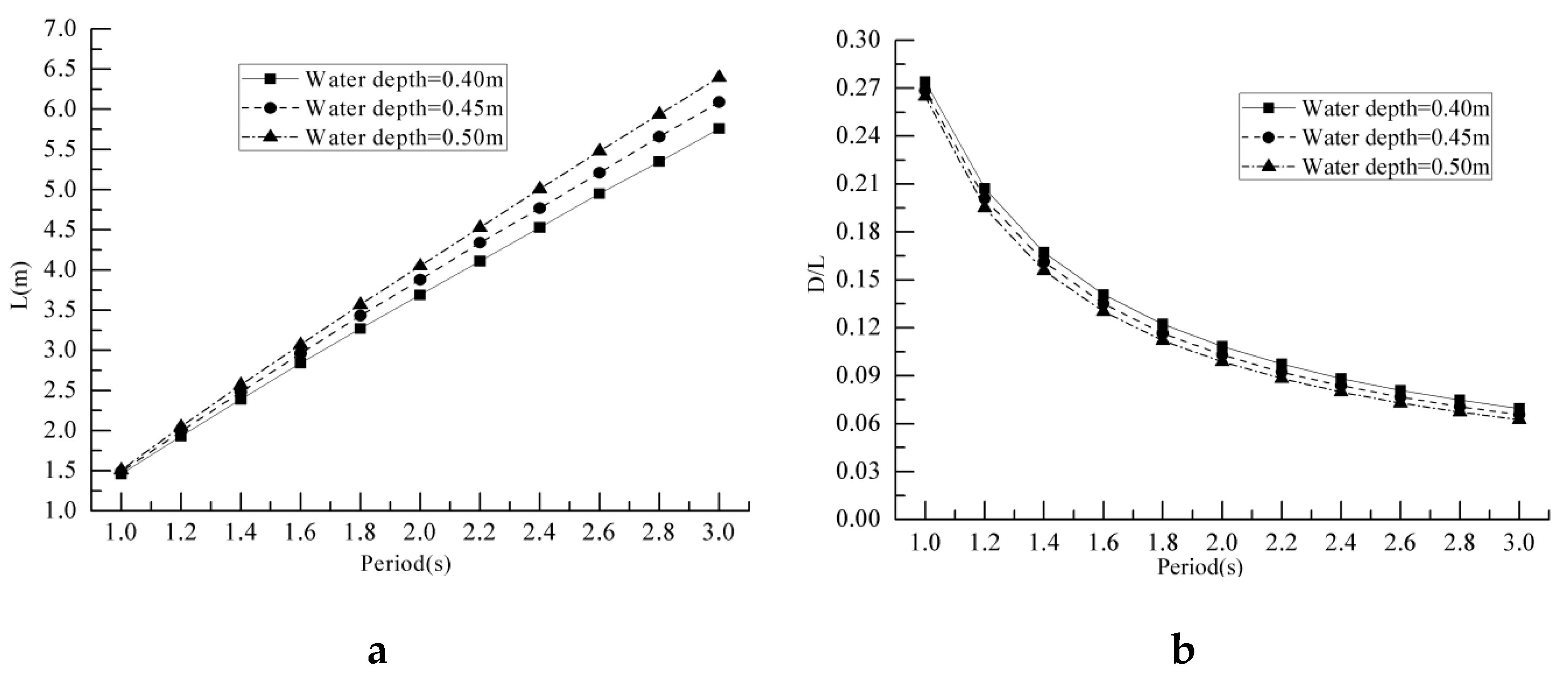
37]. As is well known, the analysis and computation of forces caused by water waves is a critical task for ocean engineering. The periods of the gravity waves induced by wind with maximum energy is ranged from 5 to 15 s [
38]. Therefore, the corresponding wavelengths are about 39 m to 351 m. The wave forces are determined by the ratio of characteristic length to wavelength. When the ratio is less than 0.2, the forces can be obtained by the Morison equation, however, when the ratio is greater than 0.2, the forces can be obtained by diffraction theory. In other words, when the diameter of a single-bucket foundation is greater than 7.8 m, the structure is considered as a large diameter structure. Although, suitable foundations and consideration of soil interaction have been explained properly already by many researchers, the section of the bucket foundation can be effectively chosen with the purpose of good soil applicability [
39,
40,
41,
42,
43,
44,
45]. In the paper, with the diameter of each bucket 10.0 m, the multibucket foundations was developed for OWTs. The multi-bucket foundations are called large-diameter multi-bucket foundations (LDMBF). Although the aforementioned studies explained the draft, compartments, water depth and wave effect on the motion of the air cushion-supported structures, there is no uniform standard for the motion parameters of LDMBF in still water and in waves, such as the added mass coefficient, and the damping coefficient. At present, the theoretical and numerical methods for the dynamic analysis of air-floating systems remain inadequate.
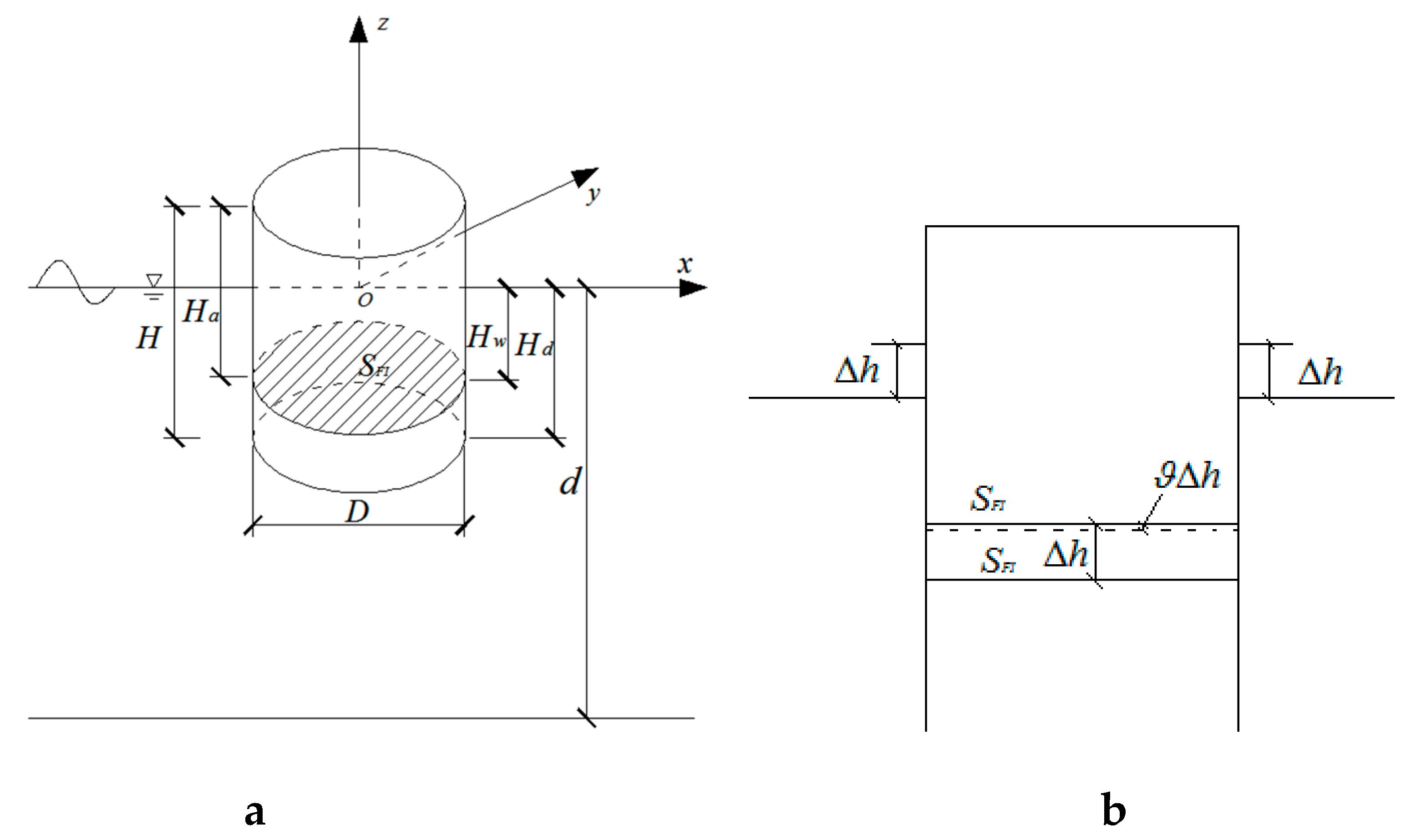
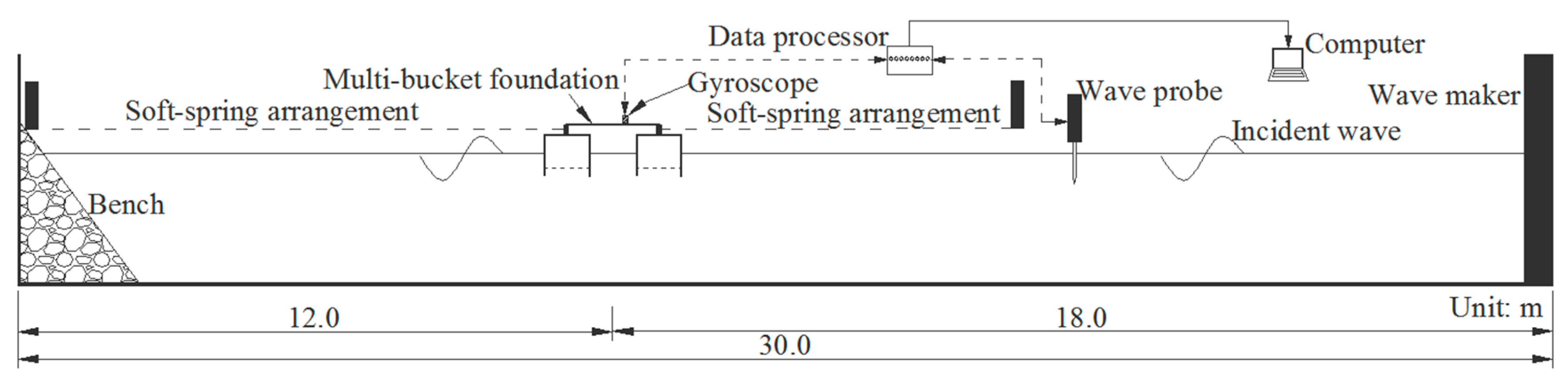
Following the theory of single degree of freedom (DOF)-damped vibration, the equations of oscillating motion for LDMBF are established. The spring or restoring coefficients in heaving, rolling and pitching motion are modified by a dimensionless parameter related to air compressibility in every bucket with the help of ideal air state equation. After that, scale physical model tests in the laboratory and numerically simulated prototype models by MOSES are conducted to investigate the natural periods, added mass coefficients and damping characteristics of LDMBF in still water and the response amplitude operator (RAO) in regular waves with different drafts and water depths.
5. Conclusions
In this study, the heaving and rocking equations of motion of air-floating LDMBF were derived by the theory of single DOF damped vibration. The ideal air state equation has been used to consider the compression effect of the air cushion inside the bucket and the oscillation equations of the LDMBF have been developed. Combined with the 1/25 scale physical model tests and the numerically simulated prototype models by the hydrodynamic software MOSES, the natural periods, added mass coefficients and damping characteristics of the LDMBF in free oscillations and the response amplitude operator (RAO) have been investigated. In this context, the main conclusions of the study are as follows:
The compressibility factor describes the difference in the generalized stiffness (stiffness of heaving motion and restoring coefficient of rocking motion) between the LDMBF and the conventional rigid-bottom float.
The natural periods of heaving, rolling and pitching motion tend to increase with increasing draft.
The added mass coefficient, which varies between 1.2 and 1.6, is equal to or larger than the recommended coefficient for ship dynamics. The coefficient 1.2 can be taken as the lower limit for a large draft and 1.6 can be taken as the upper limit for a small draft. The most possible reason is that the stiffness of the air-spring is larger for larger draft; the stiffness of the series springs comprising air-spring and water-spring becomes closer to the stiffness of the water-spring and the corresponding movement of the structure becomes closer to the movement of a rigid body.
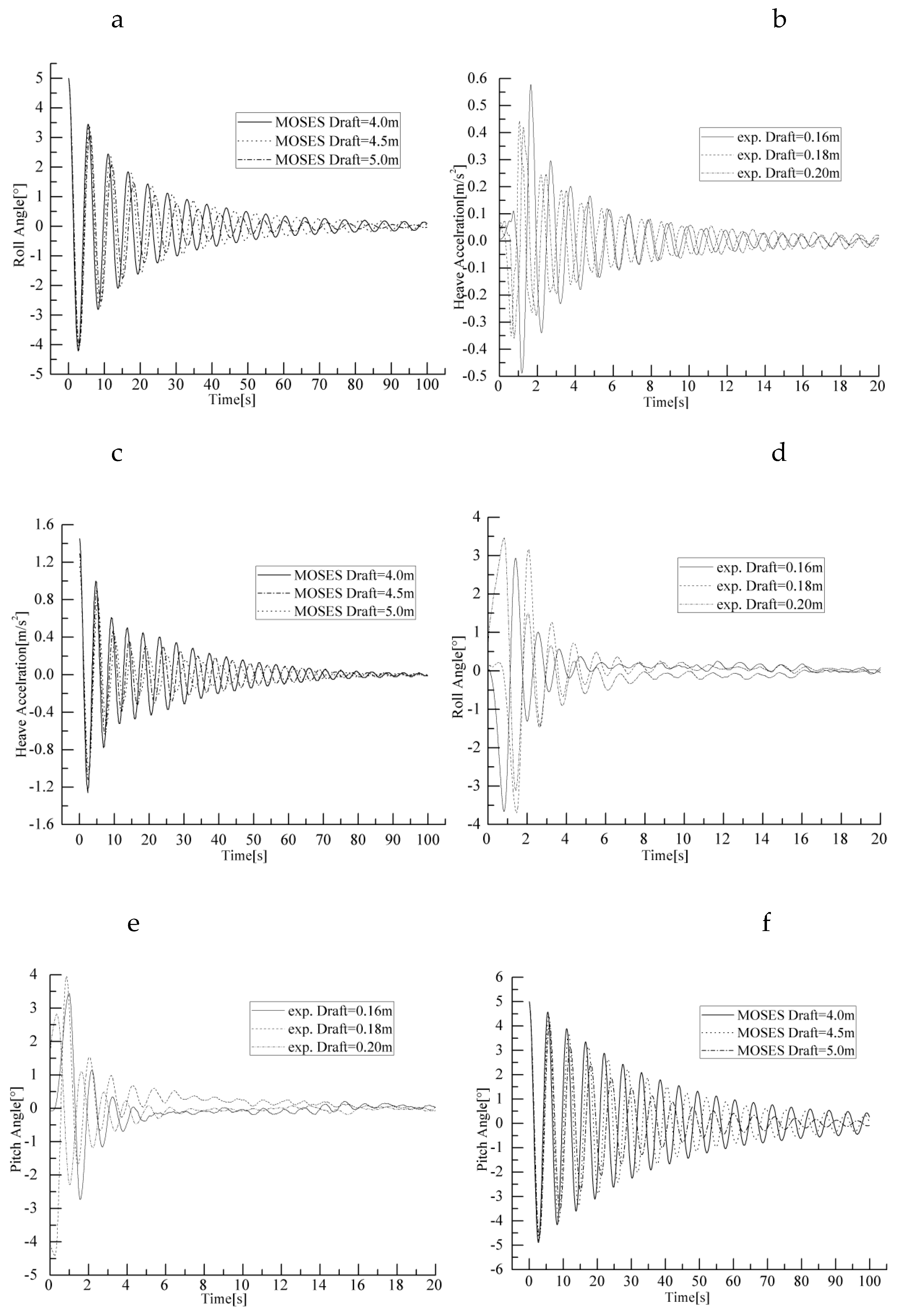
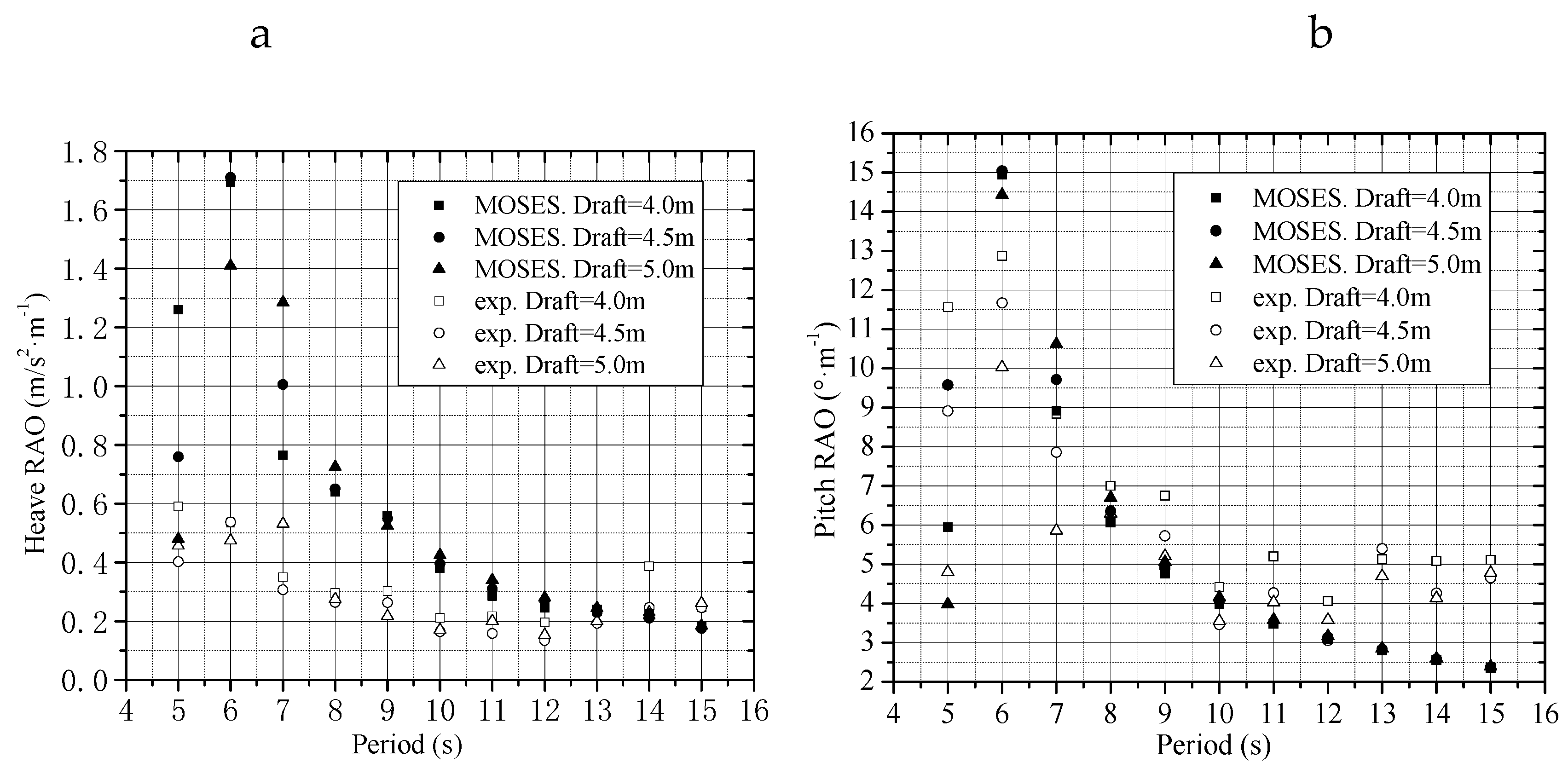
The simulated pitching movements of the LDMBF by MOSES are in good agreement with the corresponding experimental results both in tendency and in magnitude. The simulated heaving movement by MOSES can be used to forecast the trend of the motion. However, there are quantitative differences between the simulated and the model test results.
In the model tests, the resonant periods of heaving motion increase with increasing draft while the maximum motion responses decrease with the increasing draft.
In the model tests, the amplitudes of pitching angle decrease with increasing draft and have an especially significant trend when the period is less than 9 s.
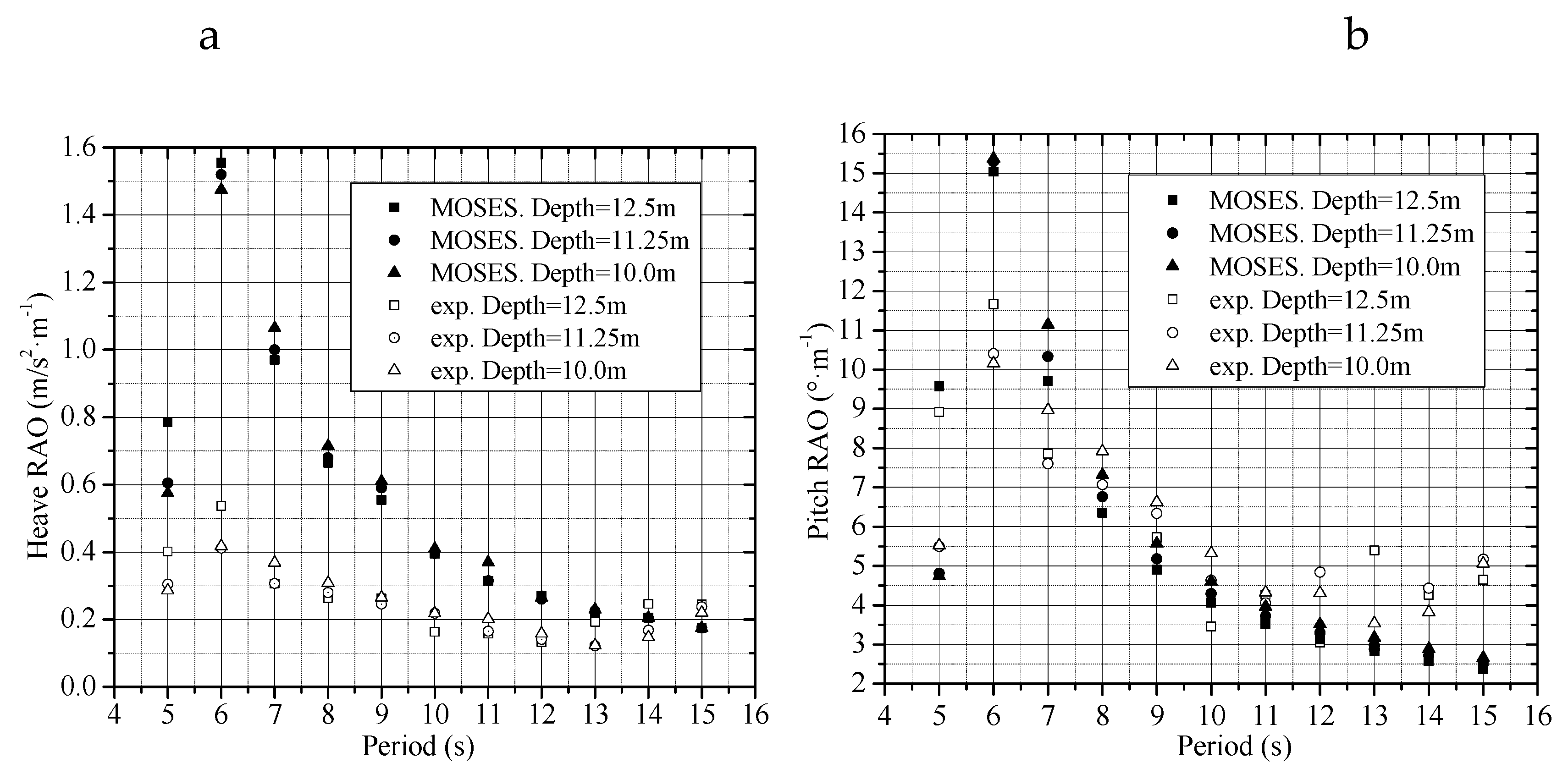
The resonant period for heave motion decreased from 6 s to 5 s with a shallower water depth. This can be attributed to the added draft resulting from the blocking effect of ocean fluid.
The amplitudes of heaving acceleration and pitching angle decrease to a limited extent with decreasing water depth. Earlier studies have shown that the effect of water depth is more significant if the speed of the structure is increased [
49]. Hence, further studies will be carried out to investigate the effect of towing speed.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}