1. Introduction
At present, power systems face major issues such as the intermittent supply of power sources due to the growing interest in renewable energy sources and energy storage systems as well as concerns regarding climate change. To this end, additional power plants can be constructed to support the network on the generation side [
1], however, conventional generators involve high installation and operating costs due to the materials and transmission logistics as well as high pollutant emissions. To deal with the intermittent nature of renewable energies, researchers have proposed energy storage systems (ESSs) that can be charged or discharged by the system operator to preserve the power balance of the network [
2]. Due to the high costs related to not only the system operating under suitable conditions, but also maintenance over a long service life, the integration of an energy storage system into a network may incur additional costs. Such technical and economic challenges as well as environmental concerns have inspired studies on a suitable scheme for system operators.
Demand-side management (DSM) [
3] is a robust approach that regulates the demand of customers through various programs such as building upgrades, financial support, incentives, and behavioral changes via education. DSM can be classified into two types: energy efficiency and demand response (DR). Energy efficiency is usually considered as a perpetual load curtailment [
4] whereas DR focuses on load elasticity, which can be considered as a temporary load reduction. In other words, DR encourages customers to reduce their power demand through certain incentive programs or education. DR can be further classified into price-based DR (PDR) and incentive-based DR (IDR). In PDR, consumer prices vary with the hours of operation in accordance with the supply-side cost; for example, prices are high, medium, and low for peak, off-peak, and low-peak periods, respectively [
5]. IDR is a program in which participating consumers are awarded incentives according to the amount of power curtailed; this can be classified into four types: direct load control, load curtailment, demand bidding, and emergency demand reduction [
6]. Recent years have witnessed an increase in the use of microgrids (MGs). Many researchers have employed MGs to test the DR performance in terms of how it can resolve the power supply uncertainty as well as economic and environmental problems [
7,
8,
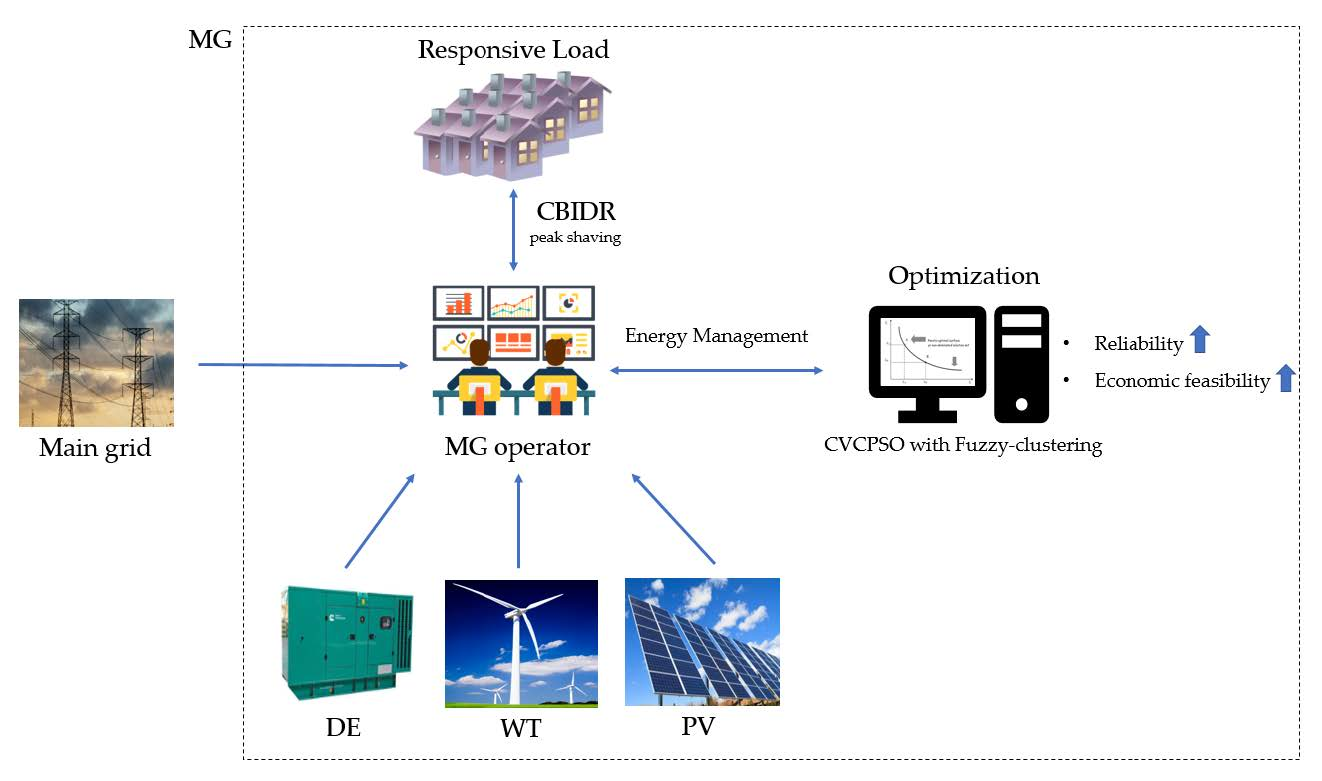
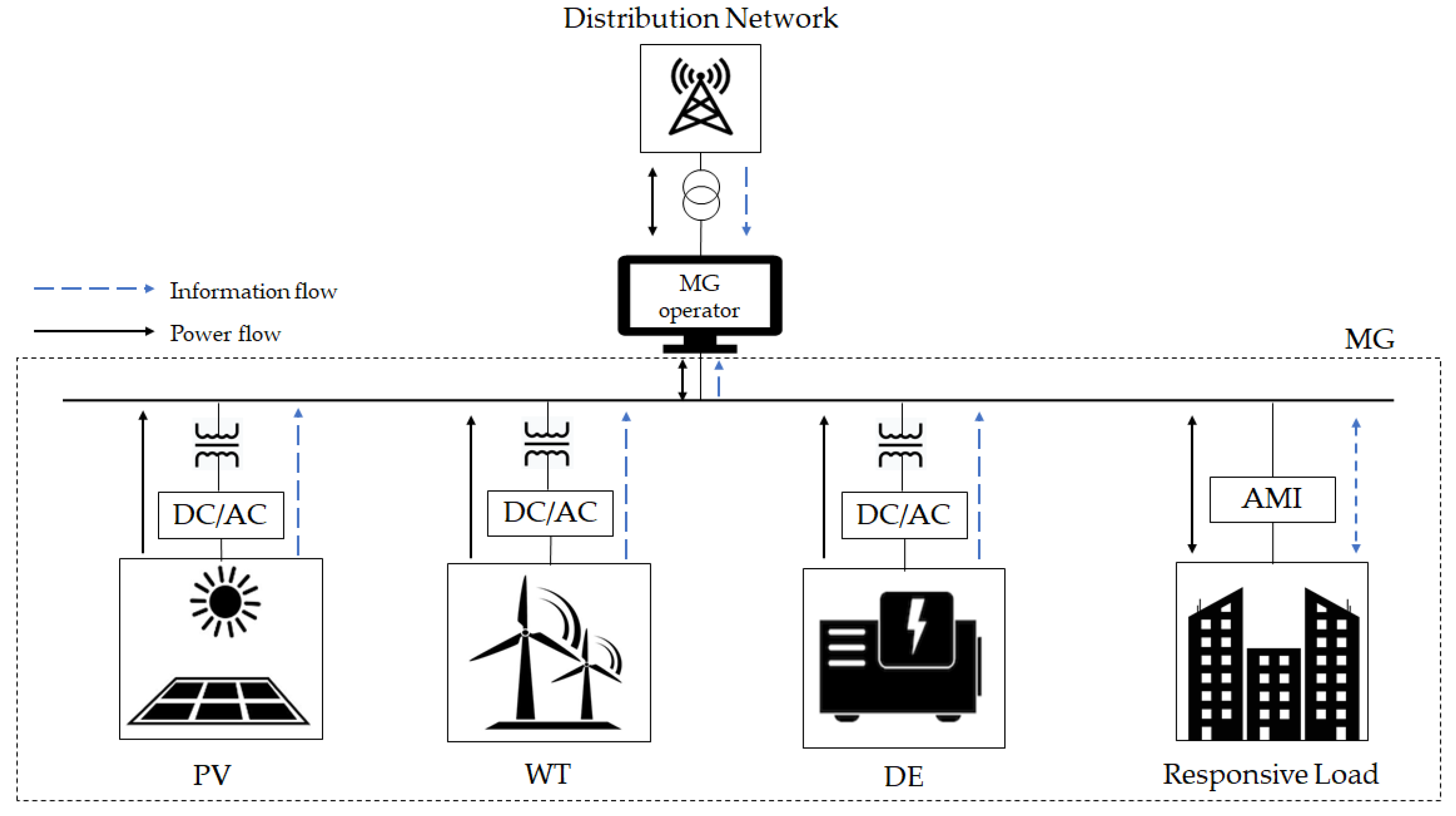
9]. A MG can be defined as a small-scale distribution network comprised of various renewable energy systems (RES) such as photovoltaic (PV) systems and wind turbines (WTs) as well as conventional generators such as thermal generators and diesel engines (DEs), energy storage systems (ESSs), and fuel cells. In general, it can be connected with the main grid to exchange power, or it can operate in an island mode in emergencies or remote locations [
10].
Considerable effort has been devoted toward the energy management of a MG by adjusting the DR. In [
11,
12,
13,
14], significant effects in terms of reducing the operating cost by incorporating DR was fully analyzed. In [
11], a genetic algorithm was adopted to show the effectiveness of the DR in reducing the operating cost of a MG. In [
12], a hierarchical energy management system was proposed to deal with the uncertainty of renewable sources and loads for the optimal operation of a MG. In [
13], a multi-agent system was used to optimize the operation of a MG including the DR strategy. In [
14], the optimal operation of a multi-MG system incorporating DR was investigated. A dynamic DR program especially for customers was designed in [
15,
16] to maximize the benefits. In [
15], a smart transactive energy framework for grid-connected multi-home MGs was proposed on the basis of the artificial bee colony algorithm. In [
16], the optimal management of a hybrid MG was proposed by considering both PDR and the internal power market via the particle swarm optimization (PSO) algorithm. The DR strategy was considered to cope with the multi-objective problem by minimizing operating costs while maximizing the benefits, when optimizing energy management problem [
17,
18,
19,
20]. The multi-agent system was also employed in [
17] to solve the economic dispatch problem with the DR by using the distributed constraint optimization scheme. In [
18], a game-theory-based multi-objective dynamic economic dispatch problem was solved using an advanced interactive multi-dimensional modeling method. The economic dispatch problem was also addressed in [
19], which considered the pollutant emissions, DR, and renewable energy sources by using the model predictive control algorithm. In [
20], a stochastic multi-objective based optimal energy management considering DR was solved on the basis of the weighted sum technique with the fuzzy satisfying method. The authors in [
21,
22] demonstrated the effectiveness of DR in reducing both the operating cost and pollutant emissions. In [
21], stochastic linear programming was used to solve the energy management problem with the presence of real time DR and a multiple power market. In [
22], a multi-objective based energy management problem with DR was solved by the augmented epsilon constraint method.
The above-mentioned studies involving the DR strategy mainly focus on reducing the operating costs, pollutant emissions, and increasing the benefits. In this regard, the effectiveness of the DR scheme has been demonstrated through various methods. Although economic and environmental issues are significant aspects of MG operation, challenges related to the peak load should also be considered. By primarily reducing the peak period load, the MG operator can ensure the reliability of the MG in emergencies. Therefore, there is an evident need to alleviate the risk of the peak period load while ensuring economical and environmentally-friendly operation when considering the optimal energy management problem of a MG.
This study emphasized an optimal energy management approach with an advanced CBIDR strategy that was implemented to enhance the reliability of the MG by mainly decreasing the peak load. The validity of our proposed strategy was verified by comparing the PLSF value to quantify the benefits of our scheme. By incorporating CVCPSO with the fuzzy-clustering technique, the proposed approach becomes capable of finding the optimal operating solution of the MG.
The major contributions of this paper can be summarized as follows:
The proposed optimal energy management implementing CBIDR could improve the reliability of the peak load when compared to the existing IDR strategy and increase the economic benefits of the MG, since the operating costs, utility benefit, and the stability of the peak load are effectively considered simultaneously. Therefore, the optimal operating solution for the MG is more reasonable and feasible.
A peak load shaving factor (PLSF) was adopted to present the effectiveness of our proposed strategy in peak load curtailment. The proposed factor helps the MG operator to determine conditions when decision-making, during which DR strategy is more advantageous in peak load reduction and thus enhances the reliability.
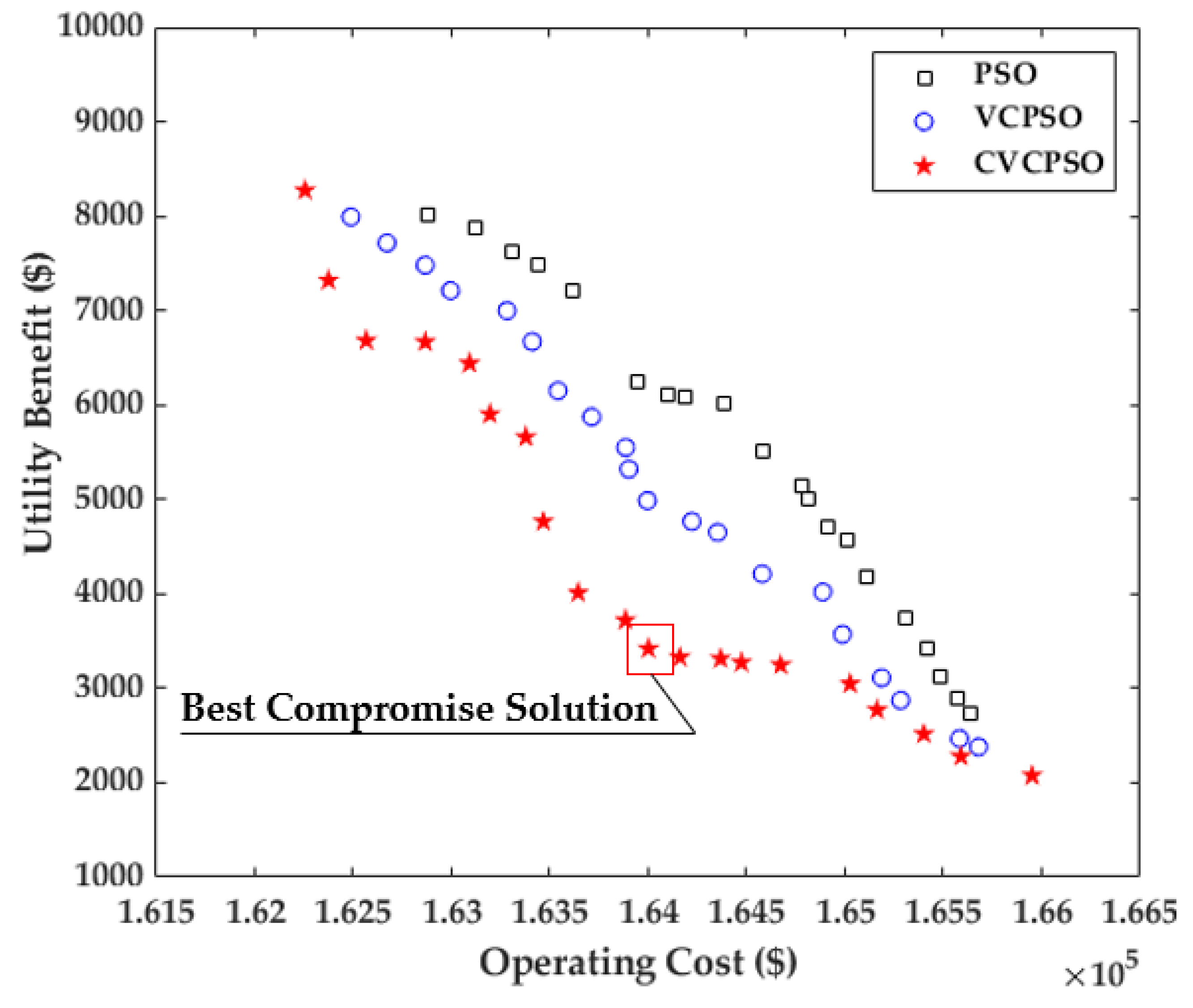
A confidence-based velocity-controlled PSO (CVCPSO) with the recommended fuzzy-clustering technique was also formulated in the proposed approach for the MG system. By using CVCPSO, the solution quality and diversity of the optimal Pareto set was improved with respect to the conventional PSO and the best compromise solution can be obtained through the fuzzy-clustering technique.
Therefore, it was noted that the proposed approach presents an optimal energy management strategy with CBIDR for a grid-connected MG system in order to ensure the economic and reliable operation; in this regard, the proposed approach provides a more reasonable and flexible solution to the MG operator to consider the economic aspect and the risk of peak load simultaneously.
The remainder of this paper is organized as follows.
Section 2 provides an overview of the grid-connected MG model.
Section 3 introduces the proposed IDR strategy.
Section 4 deals with the formulations of the multi-objective optimization problems.
Section 5 describes the formulations of the CVCPSO algorithm and fuzzy-clustering technique. In addition, it summarizes the overall process of optimal energy management.
Section 6 presents and analyzes the simulation results of the two different systems. Finally,
Section 7 concludes the paper.
3. Proposed Demand Response Strategy
We propose the CBIDR strategy to overcome the limitations of pre-determined IDR, which involves fixed incentive rates, and thus ensures system reliability under the peak load. To this end, the PLSF is used to quantify the specific benefits of implementing the CBIDR strategy.
3.1. Confidence-Based IDR
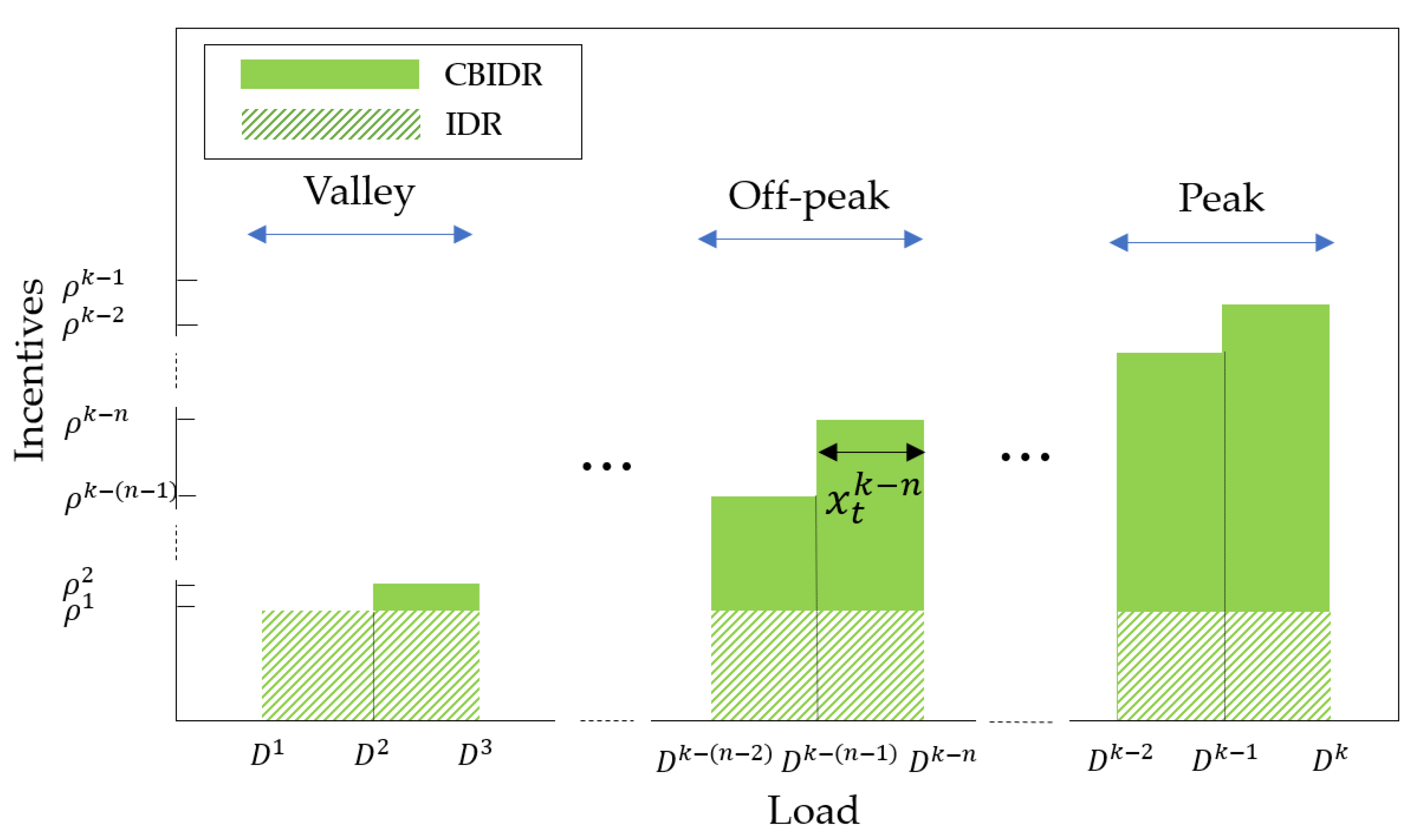
CBIDR primarily aims to encourage customers to reduce their load in the peak period through certain incentivizing strategies. Specifically, high incentives will be awarded when the load is in the peak period. In the CBIDR program, the value of the incentives awarded to the customers is considered as a function of the peak intensity (ρ), and it varies with the period in contrast to conventional IDR, which involves a fixed value. Accordingly, the incentive payment can be formulated as follows:
Here,
ρk−1 is a function of the peak intensity, where higher incentives will be paid to the customer for load reduction during the peak period.
Figure 2 compares the CBIDR and conventional IDR in terms of the incentive payment scheme. When the amount of load reduction is the same (
Dk to
Dk−1,
Dk−n to
Dk−(n−1), and
D3 to
D2) as
xtk−n, the incentives (
ρk−1,
ρk−n, and
ρ2 for peak, off-peak, and valley period, respectively) paid to the customers vary with the period in which the DR event occurs. As shown in
Figure 2, the incentive payment
ρk−1 is higher for the same load reduction when compared with the off-peak and valley periods. This concept is an advantage of the CBIDR over the general IDR, where there is no such distinction between the incentive payments over the periods. It must be improved by considering incentive payments as a function of the peak intensity. This means that customers participating in the CBIDR program will earn higher incentive payments during the peak period than during the off-peak or valley periods. Higher incentives for peak reduction can motivate customers to take part in the DR program in the peak period. To this end, the customers must be more willing to decrease their load in the peak period with respect to the conventional IDR program.
Here, the −K2xtkθj term is included to ensure that different values of θj leads to different values of customer marginal cost. Equation (6) represents the monetary loss incurred by load reduction xt by a customer of type θj.
Equation (7) defines the difference between the incentives and the cost incurred by the customer. The customer net benefit by load reduction xt must be equal to or exceed zero in order to encourage DR action.
Equation (8) represents the total utility benefit for not supplying power to the customer for time t. During the peak period, it could be expensive to supply power to the customer. In other words, paying incentives to the customers in the peak period would be more cost-effective than supplying power to the customers. In this regard, introducing CBIDR is useful for reducing the peak load while increasing the grid reliability and reducing the supply cost.
Equation (9) implies that for k = 1, the load reduction should be less than Dtk − Dtk,min. Equation (10) represents a constraint for k = 2, 3, …, K, such that the load reduction in step k for time t must be less than Dtk − Dtk−1 and greater than zero. Equation (11) represents the total reduction for all the participants for time t. Equation (12) ensures that the customers’ net benefit exceeds zero. Equation (13) implies that the customers should be appropriately compensated for their load reduction.
3.2. Peak Load Shaving Factor
The main objective of implementing the CBIDR program is peak load shaving by paying higher incentives to the customers during the peak hours. To demonstrate the effectiveness of the CBIDR program, we propose the PLSF for the MG operator, which can be defined as
where
APLFW and
APLFWO denote the average to peak ratio (
APLF) with and without DR, respectively.
PLSF is the ratio between
APLFW and
APLFWO. This index represents the peak load reduction without DR.
APLF can be defined as
APLF is defined as the ratio between the average load and the peak load in the same period. It represents the variability of the load, so that the higher the value of APLF, the greater the peak load shaving. If DR successfully curtails the load in the peak period, then APLFW will increase and PLSF will improve accordingly. The higher the value of PLSF, the greater the enhancement of the system reliability during the peak period.
The PLSF quantifies the benefits of CBIDR unless d’t reaches zero. It represents the effectiveness in terms of peak load reduction, which can be analyzed as follows:
Condition 1. PLSF > 1.
Condition 2. PLSF < 1.
Condition 3. PLSF = 1.
In condition 1, when APLFW is greater than APLFWO, the value of PLSF will be greater than 1. This represents the amount of peak demand shaving achieved without DR.
In condition 2, when APLFW is less than APLFW, the value of PLSF is less than 1. This represents the reduction in APLF without DR.
In condition 3, PLSF = 1 (i.e., the APLF with and without DR are equal). This implies that the PLSF is constant.
The PLSF represents the quantitative results for various DR strategies, and the highest value among them is the best APLF with respect to the others. In addition, if all of the DR strategies achieve the same amount of load reduction, then the DR strategy with the higher PLSF value will be ranked higher in terms of the relative peak load reduction. Based on these values, the established indices can enable the MG operator to identify the DR benefits in terms of stability in the peak period.
4. Multi-Objective Optimal Formulation
The main objective of the optimal management of energy sources in the MG is to allocate the load among the available generation units economically and securely. To determine the optimal power generation units in the MG, a multi-objective optimization problem was solved by incorporating the CBIDR. The mathematical formulations of two different objectives subject to the related constraints are presented in the following subsection.
4.1. Objective Function
The MG multi-objective formulation consists of two objectives: (i) minimizing the operating cost function f1(x), which includes the DE fuel cost, transaction cost, and pollutant treatment cost, by maximum use of renewable energies, and (ii) maximizing the utility benefit function f2(x) by implementing DR.
4.1.1. Minimization of Operating Cost Function: f1(x)
The objective function for minimizing the operating cost is as follows:
The DE fuel cost can be described as a quadratic model as follows:
The transaction cost for trading transferable power between the main grid and the MG is given by
If the supply of the grid-connected MG cannot meet the demand, then power must be purchased from the main grid. In contrast, if the supply exceeds the demand, the power remaining after satisfying the demand can be sold to the main grid. In our study, locational marginal prices (LMPs) were used to obtain the power trading coefficient
γt between the main grid and the MG [
18].
The DE pollutant treatment cost [
28] can be defined as
4.1.2. Maximization of Utility Benefit Function: f2(x)
In this study, the IDR formulations (Equations (5)–(11)) were extended to more than a single time interval to incorporate them into the dynamic energy management problem. Equation (8) can be modified to adapt it to the total optimization problem horizon
T instead of one time interval. Such conversion into a dynamic problem is more economical and practical in terms of solving the dynamic energy management problem. Finally, we adjusted the maximum power target for the utility benefit function
f2(
x) as follows:
where the number of customers is
j over period
T. Therefore, the MG operator makes a profit by not supplying power to certain customers and deducting incentive payments as shown in Equation (20).
4.2. Constraints
The total power generation from the DE, WT, and PV and transferred power from or to the main grid should match the load.
Equation (22) represents the DE generation limit, which ensures that the generator is operated between the minimum and maximum power limits. Equation (23) denotes the increased or decreased DE power output per unit time t. Equations (24) and (25) represent the constraints of the minimum and maximum WT and PV generation limits, respectively.
Equation (26) represents the transmission power constraint, which ensures that the transmission power between the main grid and the MG does not exceed the maximum limit (Ptrmax).
Equations (27)–(30) represent the constraints of the utility benefit function f2(x). Equations (27) and (28) can be substituted for Equations (12) and (13) over a day rather than a single time interval. Equation (27) ensures that a customer’s daily total incentives are greater than or equal to zero. Equation (28) implies that the greater the customers’ power consumption reduction, the greater the remuneration that they receive over the same period T. Equation (29) implies that the daily total incentives paid to the customer by the utility should be less than UTDB. Equation (30) ensures that the total daily power reduced by each customer does not exceed CMj.
5. Solution Method
5.1. Confidence-Based Velocity-Controlled PSO
PSO is a population-based stochastic optimization technique inspired by bird flocking theory [
29] and finds optimal solutions by attempting to improve a candidate solution iteratively. In a particle swarm optimizer, each particle denotes a potential solution to a problem, and it is regulated to search for the optimal solution by moving at a certain velocity in the search space in response to its own and its companions’ experience. The particles are treated in an
N-dimensional space, and the
ith particle, velocity, and position are expressed as
Xi = (
xi1,
xi2, ⋯,
xiN),
Vi = (
vi1,
vi2, ⋯,
viN), and
Pg = (
pg1,
pg2, ⋯,
pgN), respectively. The position and velocity of each particle will change according to the best and global positions. At each time step, the updated velocity and position of each particle is given by the following expression:
where
c1 and
c2 indicate the cognitive and social learning rates ranging from 0 to 1, respectively. In addition,
r1 and
r2 are random numbers ranging from 0 to 1, respectively.
The advantage of PSO lies in its simple principle and fast convergence. However, it tends to easily fall into local optima or converge prematurely. In a conventional PSO, there are three parameters (
w1,
c1,
c2) that are fixed. However, they should be adjusted several times to obtain the desired value. To overcome the limitations of a conventional PSO, we proposed the CVCPSO to improve the solution quality of the algorithm as follows [
29,
30]:
where
l is a constant that varies according to the distribution of the population. Specifically,
l = 0.5 or 2 when the distribution is too wide or too narrow, respectively; otherwise,
l = 1. The inertia weight,
w1, is a critical constant that affects the convergence speed and performance of the algorithm. Therefore, the inertia weights should be set judiciously by considering a particle’s maximum movement distance to optimize its local and global exploration capabilities. In general, there is a trade-off between a particle’s search speed and its accuracy depending on the value of
w1. The higher the inertia weight, the higher the particle’s search speed and the lower its search accuracy. According to the characteristic of the inertia value, Equation (33) implies that, instead of being fixed, the inertia weight should vary with time, decreasing linearly or non-linearly, to achieve better performance. Therefore, given the characteristic of the inertia weight above-mentioned, Equation (33) can simultaneously guarantee high search accuracy and convergence speed.
In addition, if the particle velocities are not limited, then they may increase to unacceptable levels. Accordingly, the particle velocities should be regulated by introducing constriction coefficients
c1 (
m) and
c2(
m), given by
Equations (34) and (35) respectively ensure that
c1(
m) decreases linearly and
c2(
m) increases linearly to achieve the global search ability in the early stages of iteration and local optimization ability in the later stages of iteration. Here,
c1,initial,
c1,final,
c2,initial, and
c2,fianal are the initial and final values of
c1(
m) and
c2(
m), which were set to 2.5, 0.5, 0.5, and 2.5, respectively [
31].
To avoid local optima and achieve global improvement, we added a confidence term by substituting the following equation into Equation (31):
Due to the effect of the confidence term, the velocity of the particles can be reduced at a certain iteration and the particle positions can be retreated in the opposite direction from the beginning accordingly. A particle’s retreating distance is assumed to be uncertain by employing the inertia weight w2 and random variable r3. Accordingly, the particle’s trust differs in each generation (i.e., the effect of gbest,i,n(b) varies). This improvement can reduce the density of the particles and thus maintain the particles’ diversity. To minimize the running time of the algorithm, we set w1 = w2.
5.2. Fuzzy-Clustering Technique
In general, multi-objective problems involve competing objectives. Non-commensurable and conflicting objectives that optimize more than two objective functions together cannot be solved by finding a single optimal solution. In this regard, acceptable solutions, rather than unit solutions, are attempted to be determined. To determine the superiority of solutions with respect to others, a concept of dominance is defined. Consider two vectors
x1 and
x2, where
x1 = [
x1,1,
x1,2 ⋯x1,y],
x2 = [
x2,1,
x2,2⋯x2,y], and
y is the number of objective functions. In a maximization problem, a solution
x2 dominates
x1 if neither of the following two constraints is violated:
If all the above-mentioned constraints are satisfied,
x2 dominates
x1. A vector
x2 is called a non-dominated local set and the solutions that are non-dominated among the entire search space are called the non-dominated global set or the Pareto-optimal set. Accordingly, a multi-objective optimization problem leads to a set of optimal solutions called the Pareto-optimal set. In this study, a fuzzy-clustering technique [
32] was used to extract the best solution that had the maximum value of the fuzzy membership function and provide it to the decision maker. The optimal-Pareto solution sets were converted into fuzzy membership functions as follows:
Finally,
μy(
a), considering all the objective functions, can be calculated as
The higher the value of μ(a), the higher the likelihood of obtaining the best compromise solution.
5.3. Solution Procedure
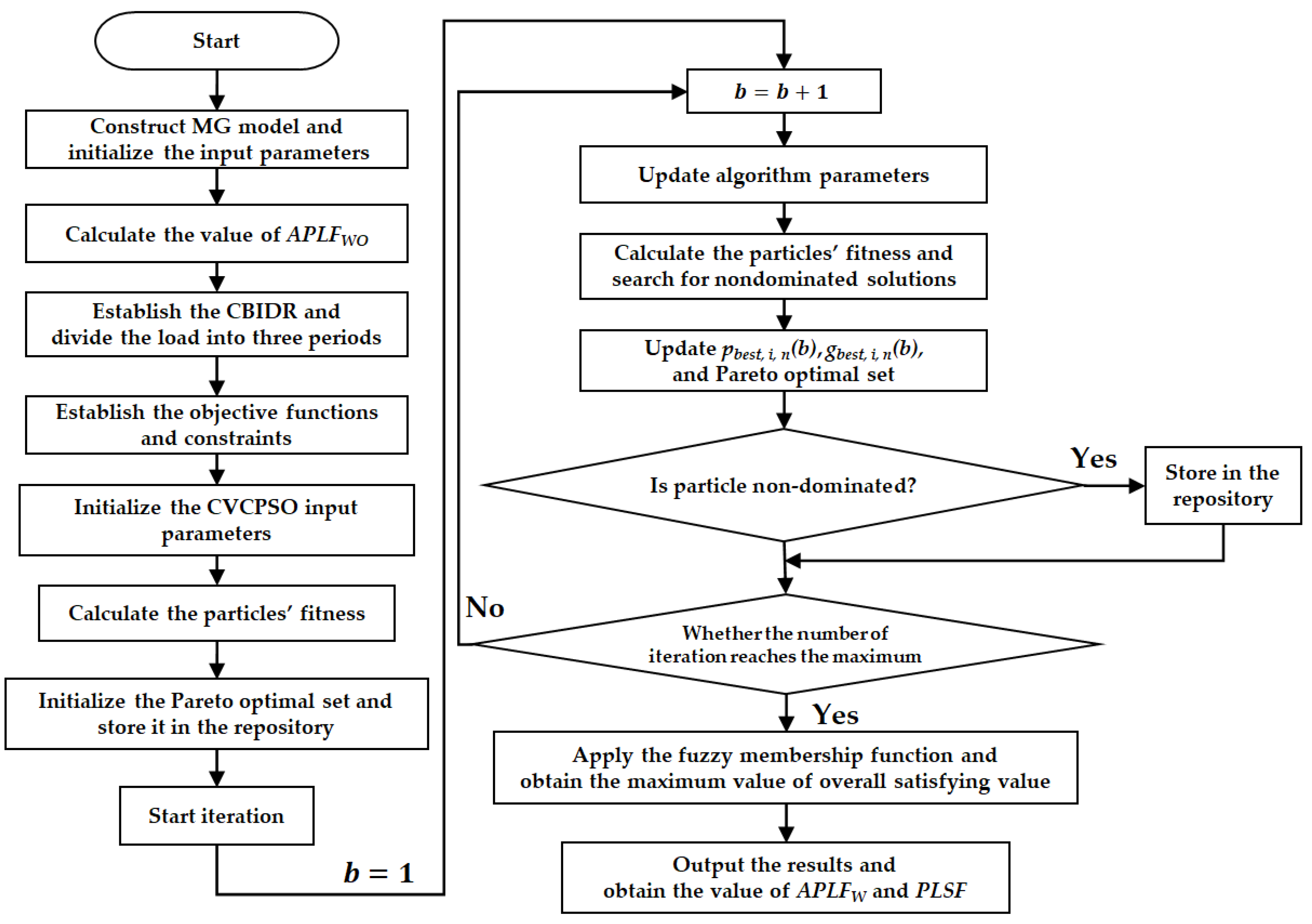
Optimal energy management procedure of the grid-connected MG implementing CBIDR is performed in the following sequential manner:
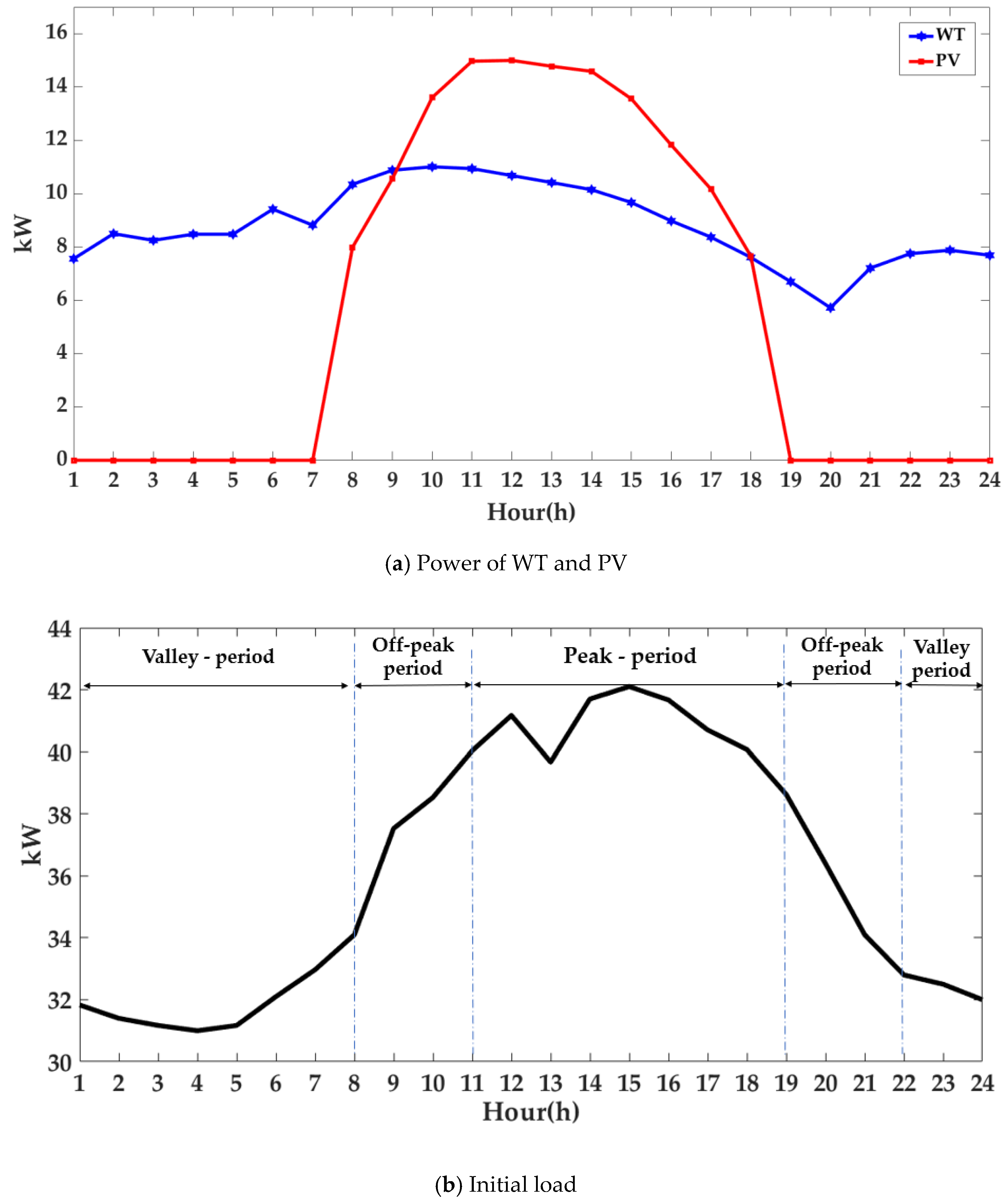
Step 1. Construct the MG model as shown in
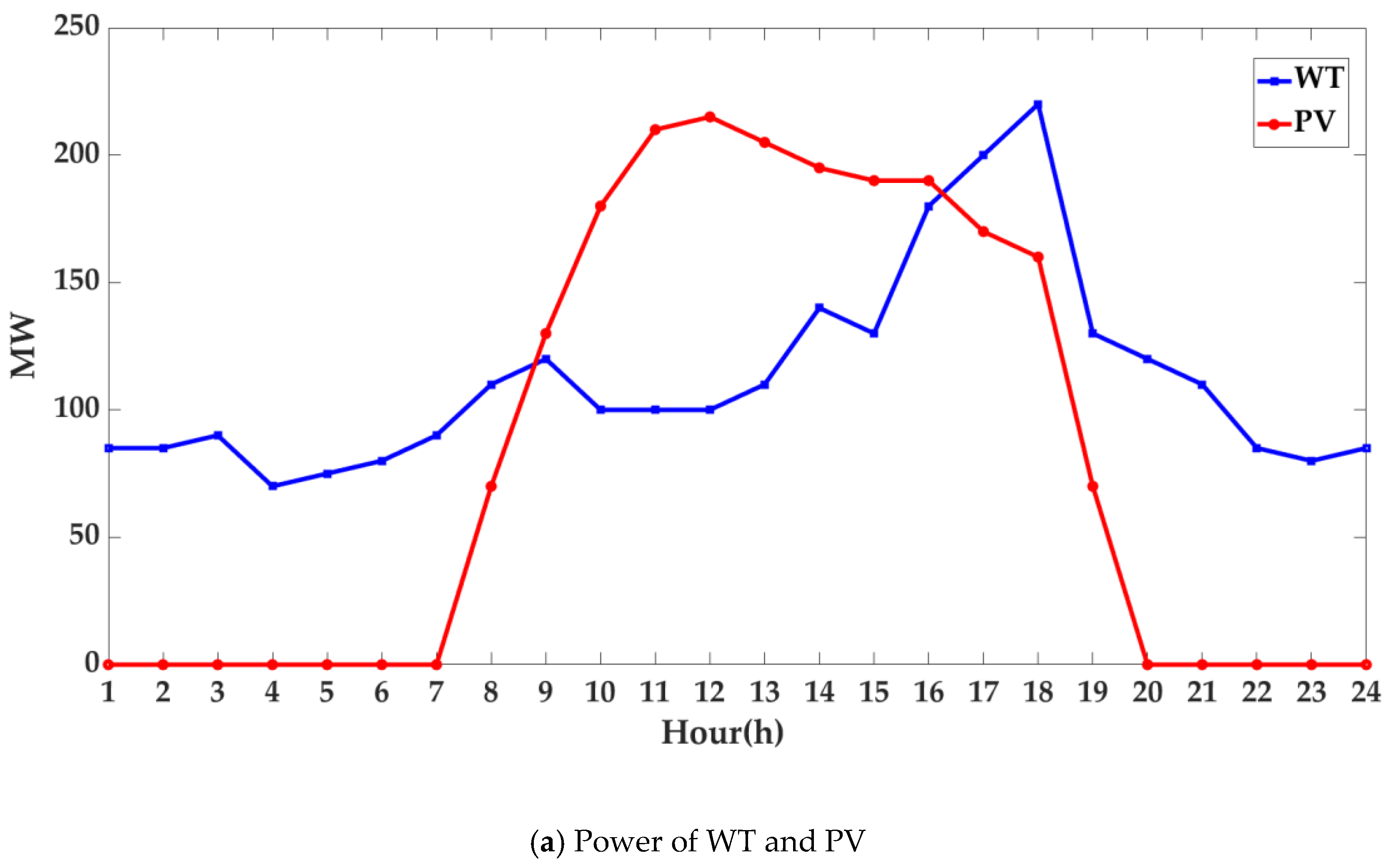
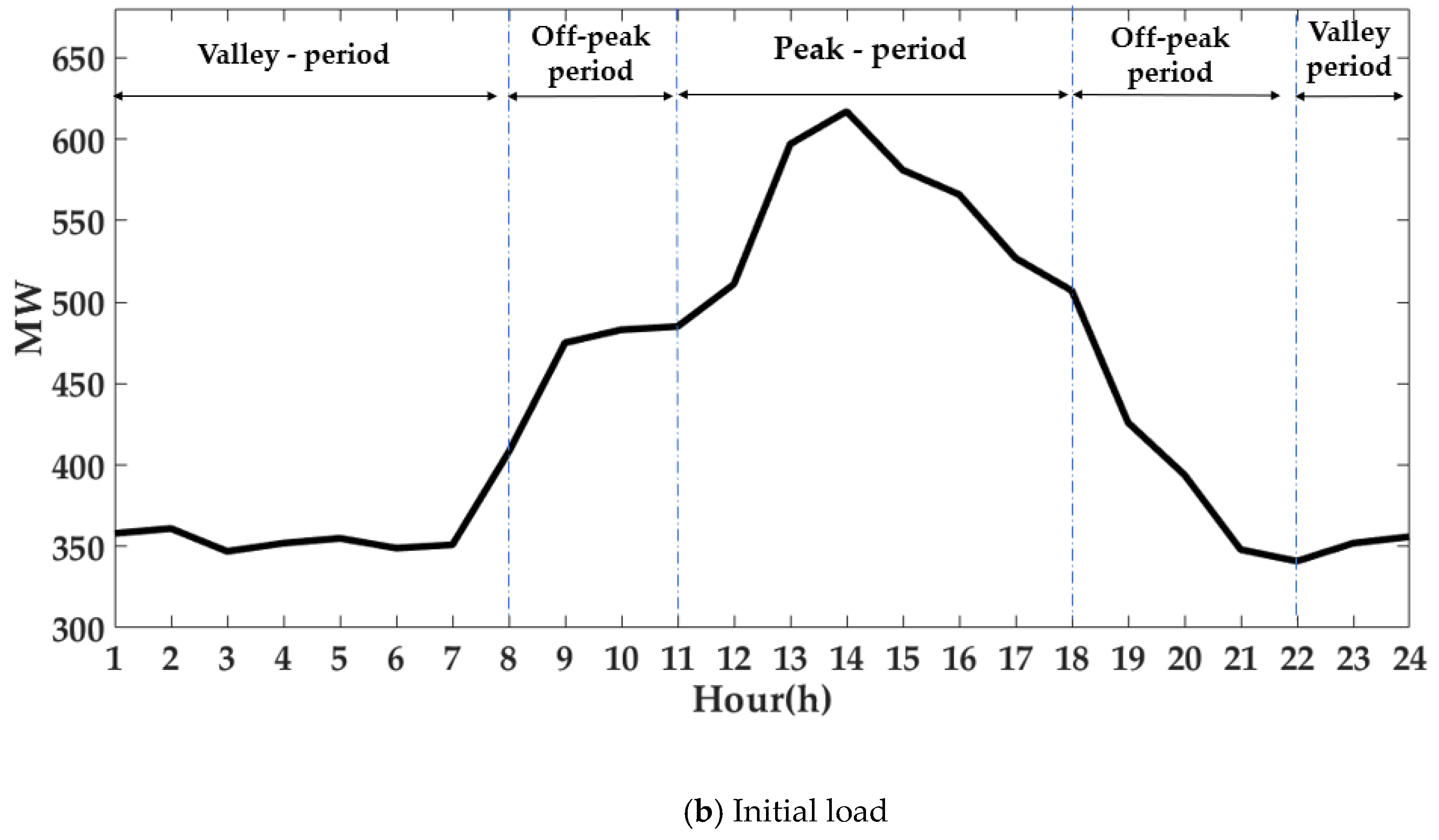
Figure 1 and initialize the MG input parameters (DE, WT, PV, and Load).
Step 2. Calculate the value of APLFWO, according to Equation (15).
Step 3. Establish the CBIDR program as shown in
Figure 2 and divide the load into three periods.
Step 4. Establish the objective functions and the corresponding constraints given by Equations (16)–(30). Set the CVCPSO input parameters (w1, w2, c1(1), c2(1), B, NP, S, and U) required to initialize the algorithm.
Step 5. Calculate the particle fitness according to the objective functions and the corresponding constraints. Initialize the Pareto-optimal set and store it in the repository.
Step 6. Start a loop iteration.
Step 7. Update the position and velocity of each particle according to Equations (32) and (36). Update the algorithm parameters w1, w2, c1(m), and c2(m) according to Equations (33)–(35).
Step 8. Calculate the particle fitness and update the non-dominated global set.
Step 9. Obtain the iteration results (i.e., the Pareto-optimal set) stored in the repository.
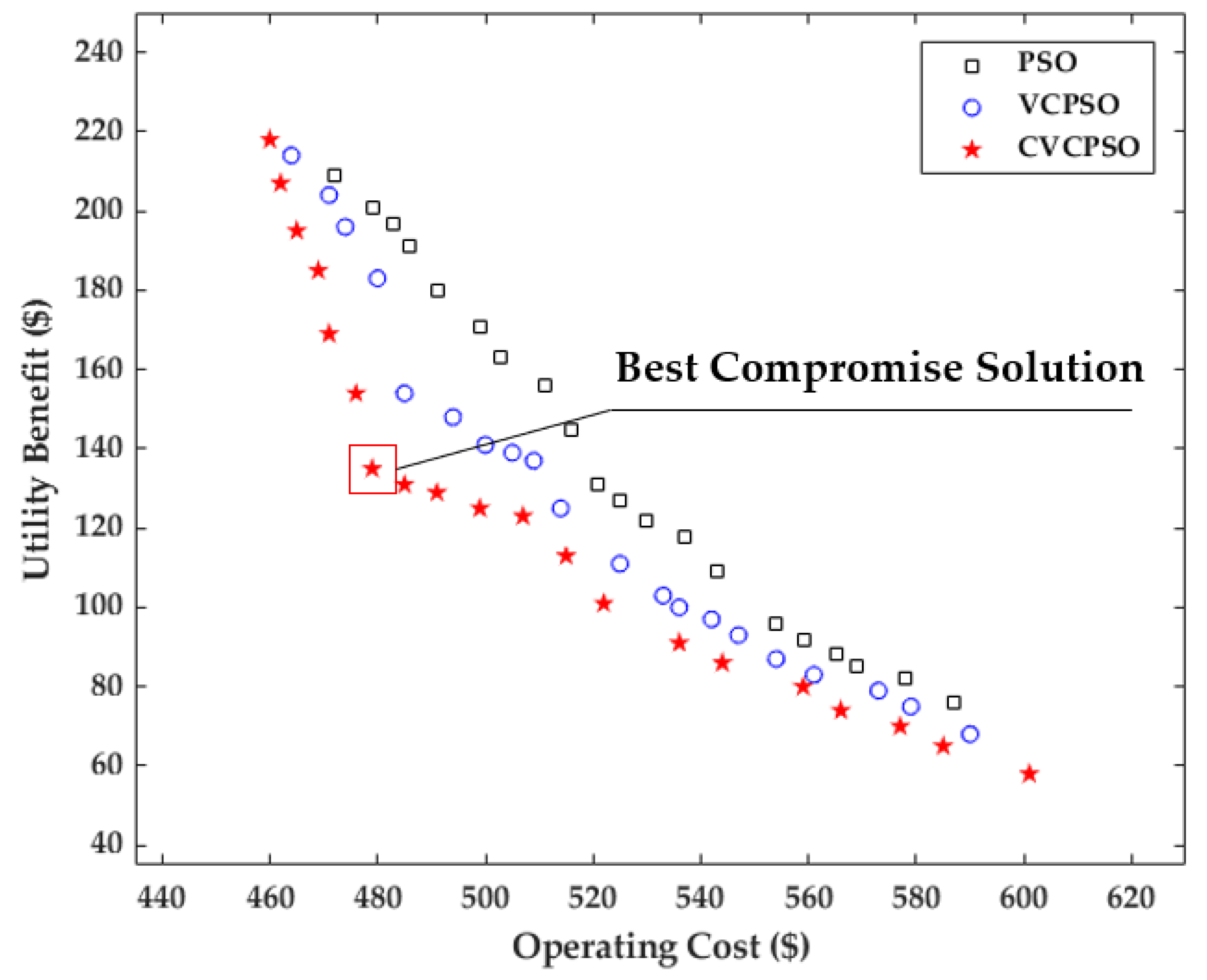
Step 10. Take the maximum value of the fuzzy membership function from Equation (39) and take the maximum value of μ(a) from Equation (40) to obtain the best compromise solution.
Step 11. Output the best compromise solution and calculate the values of APLFW and PLSF.
The overall optimization process of MG energy management is shown in
Figure 3.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}