1. Introduction
Being 3–5 times more energy efficient than conventional internal-combustion engine vehicles, Electric Vehicles (EVs) have been globally expanding at a rapid pace over the last decade to meet the requirements of conventional-fossil-fuel conservation and vehicle-exhaust-emission reduction [
1]. According to the report of the International Energy Agency (IEA), in 2018, global electric cars exceeded 5.1 million, and up to 2 million cars were from the previous year [
2]. In this huge EV market, different types of EVs are available, mainly including Plug-in Hybrid EVs (PHEVs), full Battery EVs (BEVs), and Fuel Cell EVs (FCEVs) [
3].
Compared with a PHEV or a BEV, an FCEV—an EV that uses hydrogen via a fuel cell to power an electric motor—has unique advantages and has attracted much attention from both the research and industry communities [
4]. For example, hydrogen contains three times more energy per unit of mass than gasoline, making it very attractive as a transport fuel; an FCEV has zero tailpipe emissions and short refueling time; moreover, a fuel cell could have lower material footprint than lithium batteries [
5]. Accordingly, FCEVs are not only considered applicable for light-duty passenger vehicles but are also attractive options for long-distance and heavy-duty ones. Statistical data show that about 4000 fuel-cell electric cars were sold in 2018 to reach a total stock of 11,200 units in the world [
5].
Although an FCEV is very attractive for the above characteristics, due to the performance of a fuel cell, its application in EVs still has some deficiencies. Without the health and safety considerations of hydrogen-based fuel and the installation issues of hydrogen-refueling infrastructure for FCEVs, those deficiencies mainly include: (1) a fuel cell has low power density, resulting in the weak acceleration performance of an FCEV; (2) because of activation, ohmic and concentration polarization losses, the output voltage/current characteristic of a fuel cell is quite ’soft,’ resulting in an obvious output-voltage drop with increasing load current; and (3) a fuel cell is not able to recover energy, resulting in vehicle-braking energy loss in applications [
6,
7,
8].
To deal with the above deficiencies, a fuel cell is usually collaborated with a battery to power an FCEV because the battery has higher power density for accelerations and can recover energy from the braking system [
9]. For example, the 2019 Toyota FCEV—Mirai—is powered by a fuel-cell stack of 112 kW and an auxiliary driving battery with a maximum electricity output of 9 kW; the battery allows for regenerative braking energy and also assists the EV during high-power demands like acceleration [
10].
However, the integration of a battery into an FCEV requires energy management. The purpose of energy management is to improve total system efficiency and protect hybrid-power sources and enhance their serviceability [
11]. An effective EMS can improve the driving performance of an FCEV and even product competitiveness. Accordingly, EMSs have been a research hotspot with the development of hybrid-source-powered EVs in recent years.
In an FCEV, an EMS configures the hybrid-power sources to provide sufficient energy for driving the vehicle in different traffic conditions while offering a timely response to address possible fast power changes due to accelerating or braking by dynamically balancing load sharing among power sources [
12,
13,
14].
To realize the energy management of an FCEV, different methodologies can be found from the literature, such as rule-, Frequency Decoupling (FD)-, Fuzzy Inference System (FIS)- and optimization-algorithm-based methods.
The rule-based EMSs are easy to implement and have been widely adopted [
15,
16,
17]. The technique proposed in Reference [
15] divides system states into three categories according to the battery’s State of Change (SoC) and determines fuel-cell reference power by the rules according to load power and fuel-cell power constraints. Simulation results showed that this strategy is simple and effective, but the high performance of the battery was not given full consideration. Roumila et al. [
16] divided the system into eight states according to battery SoC and load power and defined a reference power of the fuel cell in each state. Simulation results showed the effectiveness of this strategy but the definition of reference power of the fuel cell in each state was empirical.
The basic idea of FD-based methods is to decouple and redistribute the required load power in the frequency domain according to the load characteristics of each power source [
18,
19,
20]. For example, an FD-based method is designed to divide power demand into high- and low-frequency components, and then distributes them to the battery and fuel cell, respectively. Li et al. and Ibrahim et al. proposed a wavelet-transform- and fuzzy-logic-based FD method in which low-positive-frequency components of the required power are distributed to the fuel cell and high-frequency components are distributed to the auxiliary energy source [
18,
19]. Marzougui et al. used a first-order low-pass filter to separate the required power for the FD but the filtering-hysteresis problem made it difficult for the fuel cell to follow the low-frequency trend of the load power [
20]. FD-based methods are intuitive and efficient but the filtering-hysteresis problem and computational complexity are the main limitations. Another disadvantage of this method is that the SoC of the battery is not taken into account.
FIS-based methods manage hybrid-power sources according to formalized-expert experience and fuzzy inference. Because of their robustness and flexibility, many researchers adopted FIS-based strategies for real-time energy management [
21,
22,
23]. Yang et al. designed a two-input/one-output fuzzy-power controller with load current and battery SoC as inputs and fuel-cell reference current as output [
24]. Marzougui et al. designed a fuzzy controller by using trapezoidal membership functions to restrain fuel-cell power fluctuations, but simulation results showed that the sensitivity of the designed controller was compromised [
8]. A difficulty of FIS-based energy management is parameter configuration. To reduce parameter-design difficulty and enable better control performance, many researchers considered combining other algorithms with FIS such as wavelet–fuzzy strategies [
25,
26,
27]. Another deficiency concerning current research on FIS-based energy management is that simulation models are often simplified for fast simulations, with reduced accuracy [
28,
29,
30].
Optimization-algorithm-based EMSs usually convert an energy-management problem into a solution-searching problem by defining an object function that is normally used to minimize running cost and/or emissions and adopting an iterative algorithm to find the optimized solution satisfying system-constraint conditions [
31,
32]. This type of energy-management method can calculate optimized power distributions and take them as control reference for different power sources, accordingly resulting in great advantages for fuel economy. Wang et al. designed an object function to minimize hydrogen consumption and calculate the power distribution of fuel cells and lithium batteries [
31]. The hydrogen-utilization rate and system efficiency were improved according to simulation results. Nuesch et al. included fuel consumption and the vehicle emission into one object function with different weights, and adopted a transient optimization method to minimize the target and managed the output power of the diesel engine and the battery in a hybrid vehicle. Simulation results showed that this strategy optimizes fuel consumption within various constraints [
32]. With this type of method, if the global-optimization solution can be found and used as control reference of hybrid-power sources, the fuel economy can be improved; however, the searching process in the solution space is time-consuming and, accordingly, their applications in real-time scenarios are limited.
From the above analysis, it can be seen that different energy-management methods have their advantages but also shortcomings in FCEV applications. It is easier to apply rule-, FD- and FIS-based methods in real-time situations than global optimization-based methods, but they are not as adaptive and optimal as the latter ones; for an optimization-based method, the searching process in the solution space takes time and this kind of method is not always applicable for real-time applications in an FCEV with lots of dynamics during a driving process. Moreover, another problem of the current research on EMSs of an FCEV is that changes in driving conditions are not fully taken into account in EMS design. In reality, actual traffic conditions are complex and changeable, and EMSs designed with a certain condition may not be usable under all other driving conditions [
33].
Considering the main difficulties in the current research of energy-management methods for an FCEV, a novel EMS combining an advanced FD technique and an FIS with a traffic-condition predictor is proposed in this paper for an EV powered by a fuel cell and a battery. The proposed traffic-condition-based HMA-FIS EMS has the advantages of FD/FIS-based methods and does not need complicated calculation; the adaptability of this method can be improved by the contribution of the traffic-condition predictor.
The rest of this paper is organized as follows—the structure and composition of an FCEV, which was taken as the research object of this paper, is described in
Section 2. In
Section 3, the proposed EMS is presented. To verify the effectiveness of the proposed EMS, a simulation platform of the FCEV with the proposed EMS was built with MATLAB/Simulink in
Section 4 and some simulation results are presented with comparisons in the same section. Finally, in
Section 5, the conclusion of this paper is made.
2. FCEV Structure and Its Power System
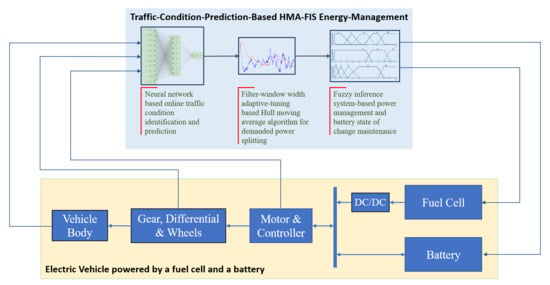
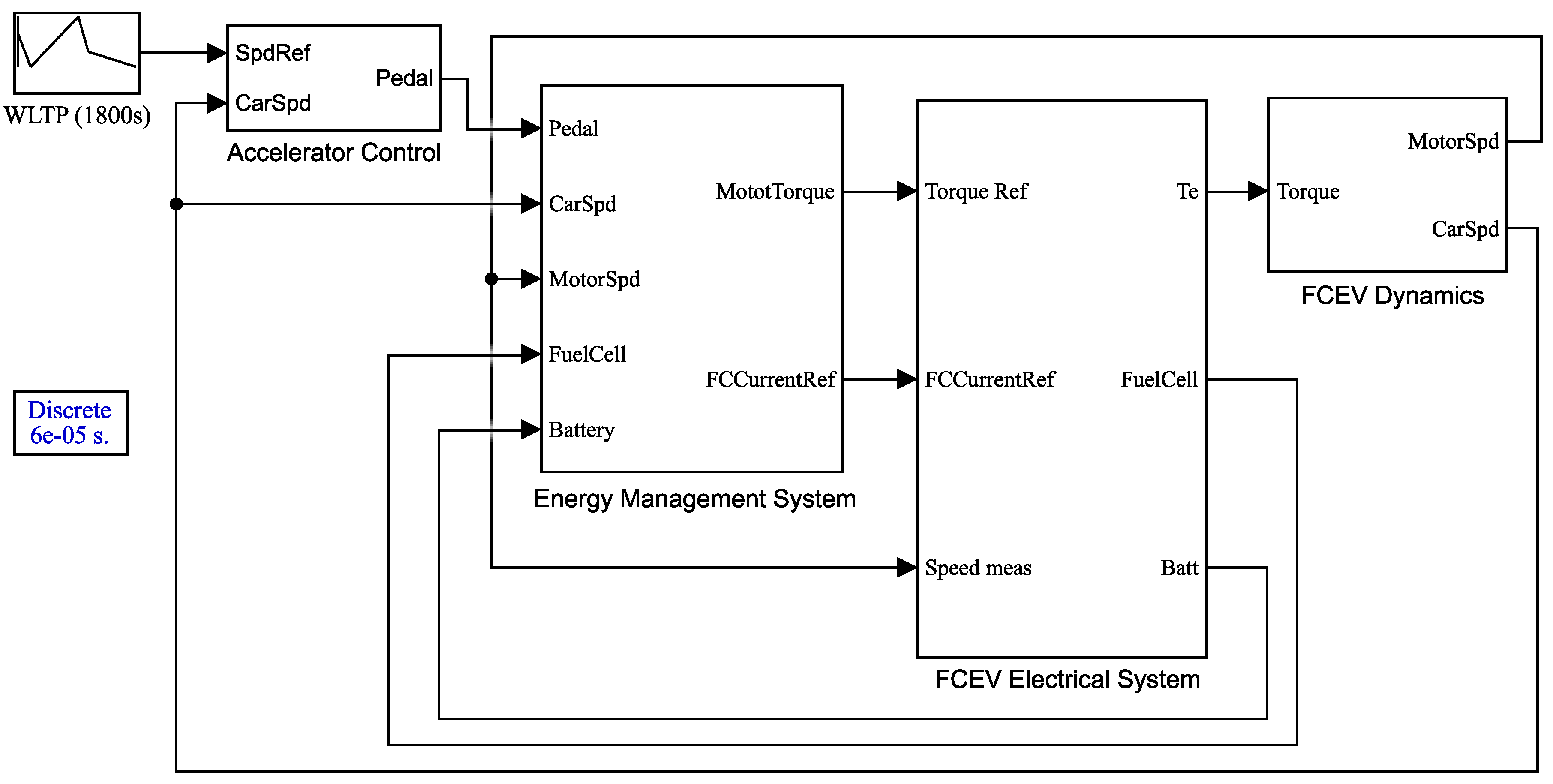
A front-wheel-driven FCEV, including a fuel cell, a battery, a DC/DC converter, a traction motor and its controller, wheels and vehicle body, is taken as the research object in this paper. The structure of this FCEV is shown in
Figure 1.
In
Figure 1, it can be seen that the fuel cell is connected to the DC bus via a DC/DC converter, which was adopted to convert the output voltage of the fuel cell to the nominal voltage of the DC bus. A battery was used as an auxiliary power source in order to enhance powertrain performance and increase the system’s capability for energy recovery. The battery is directly connected with the DC bus to take advantage of quick charging/discharging performance, and to decrease the size and weight of the hybrid-power supply [
34]. The fuel cell and the battery jointly provide the necessary energy through the DC bus to drive the vehicle according to speed reference.
The EMS provides the output-power reference of the fuel cell according to the feedback parameters of the motor, the hybrid-power sources, and the vehicle with the proposed power-management method. The battery delivers the rest of the required power by subtracting the fuel-cell power (controlled by the EMS) from the total demanded power.
A Permanent Magnet Synchronous Motor (PMSM) and a three-phase inverter, powered by the DC bus, were taken as the traction-motor system of the FCEV. The Maximum Torque Per Ampere (MTPA) control principle was adopted to control the motor below the base speed and a flux-weakening method was used to achieve maximum motor speed [
35,
36,
37].
The vehicle dynamic, mainly including gear, differential, wheels and brakes, and EV body, is shown in
Figure 1. Since the mechanical transmission system of the vehicle is not the main focus of this paper, the modeling of the vehicle dynamic is not discussed in detail and the related details can be found in References [
38,
39,
40].
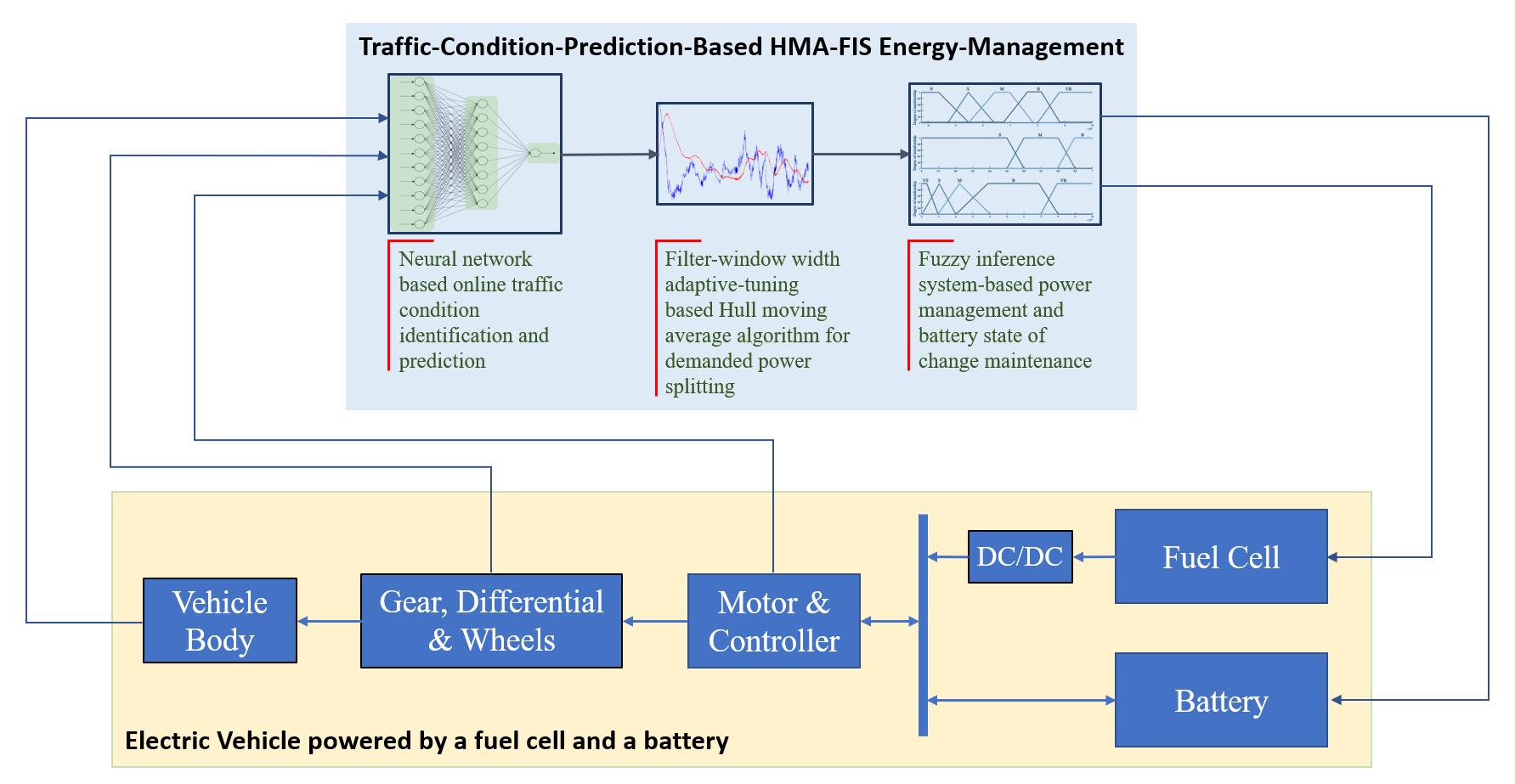
3. Traffic-Condition-Prediction-Based HMA-FIS Energy-Management Strategy
The flowchart of the proposed EMS is shown in
Figure 2, which represents the working flow of the EMS block in
Figure 1.
In
Figure 2a, the block in the gray background is an ANN-based traffic-condition predictor that can forecast driving conditions according to real-time running signals of the FCEV and pass the prediction result on to the adjacent frequency-decoupling block labeled shown in
Figure 2b, where an adopted HMA algorithm is shown; its window width is adjusted according to the predicted traffic condition among three predefined categories. The HMA filters out high-frequency components from the demanded power and transfers the low-frequency parts of the required power to the next block (
Figure 2c in gray background). That block is based on fuzzy inference and is used to calculate output reference power of the fuel cell according to battery SoC and the low-frequency trend of the demanded power.
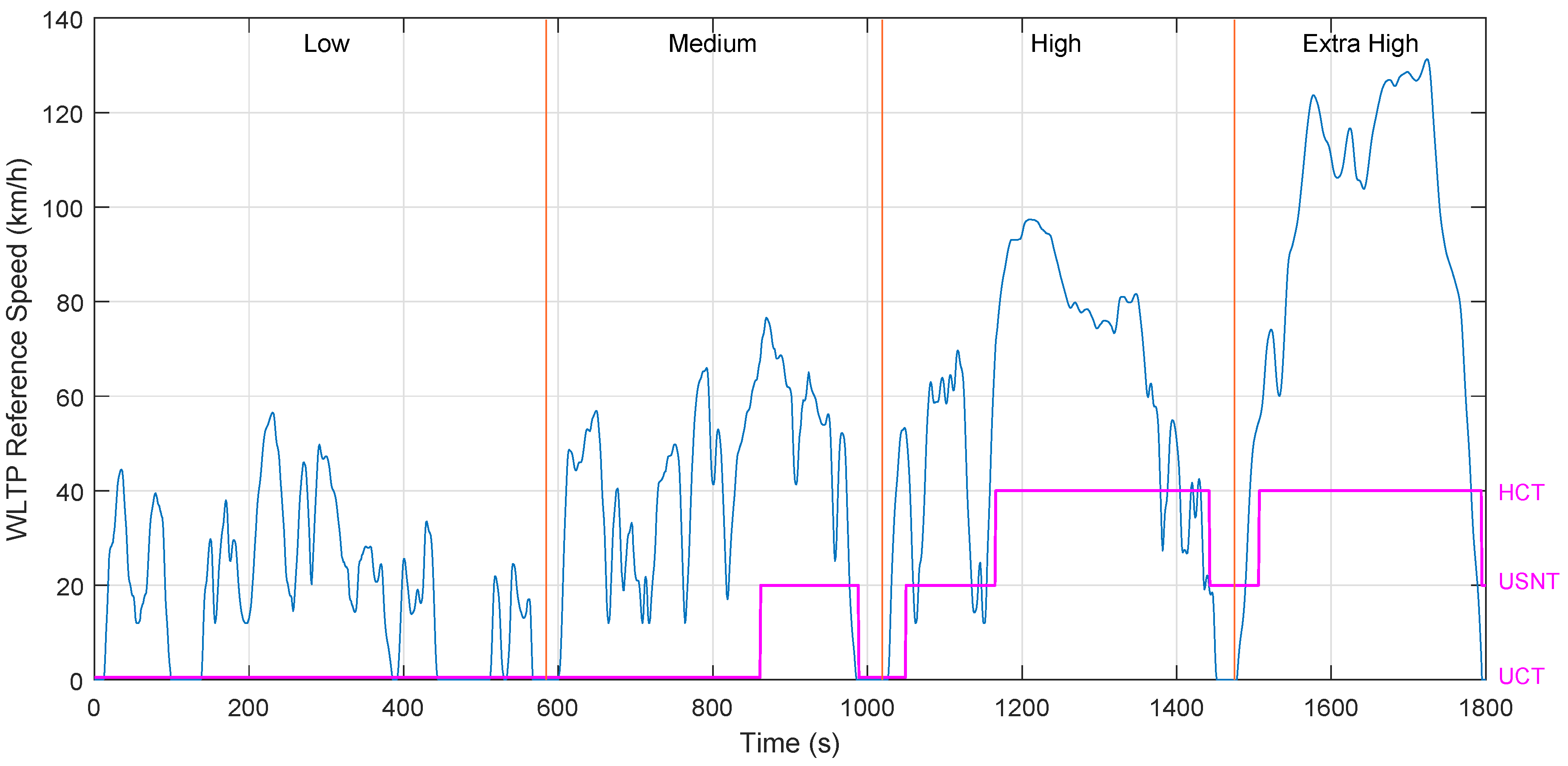
3.1. Traffic-Condition Categorizing
To make the proposed EMS adaptive to varying traffic conditions, driving-condition categories are defined in this section that were taken into account in the energy-management process.
According to Reference [
41], common traffic conditions can be divided into three main types—Urban Congestion Type (UCT), Urban/Suburb Normal Type (USNT) and Highway Clear Type (HCT). The UCT is the condition where a vehicle is driving on a congested urban road and its characteristics are low average speed with frequent idling. USNT includes situations where the vehicle is driving in urban or suburban areas with a better traffic environment; average speed is higher than that of UCT but due to the existence of traffic lights, idling frequency is still high. The HCT is the driving condition in a flat, closed and straight road with clear traffic, average speed is high and the vehicle is seldom idle. The characteristics of the three traffic conditions above are summarized in
Table 1.
3.2. Neural-Network-Based Traffic-Condition Predictor
Because different traffic conditions lead to different power demands for driving an FCEV, a traffic-condition predictor was developed to enhance the adaptability of the EMS to different traffic conditions.
Although features of the defined traffic conditions in
Table 1 are straightforward and in consistency with our experience, it is not easy to automatically identify current driving conditions in real time because characteristic parameters are coupled, and there are nonlinear relationships between driving parameters and condition types. Accordingly, a Back Propagation Neural Network (BPNN) was adopted to realize traffic-condition predictions due to its good nonlinear mapping capability. Then, the predicted result was used to adjust the window width of the subsequent HMA algorithm in the EMS working flow.
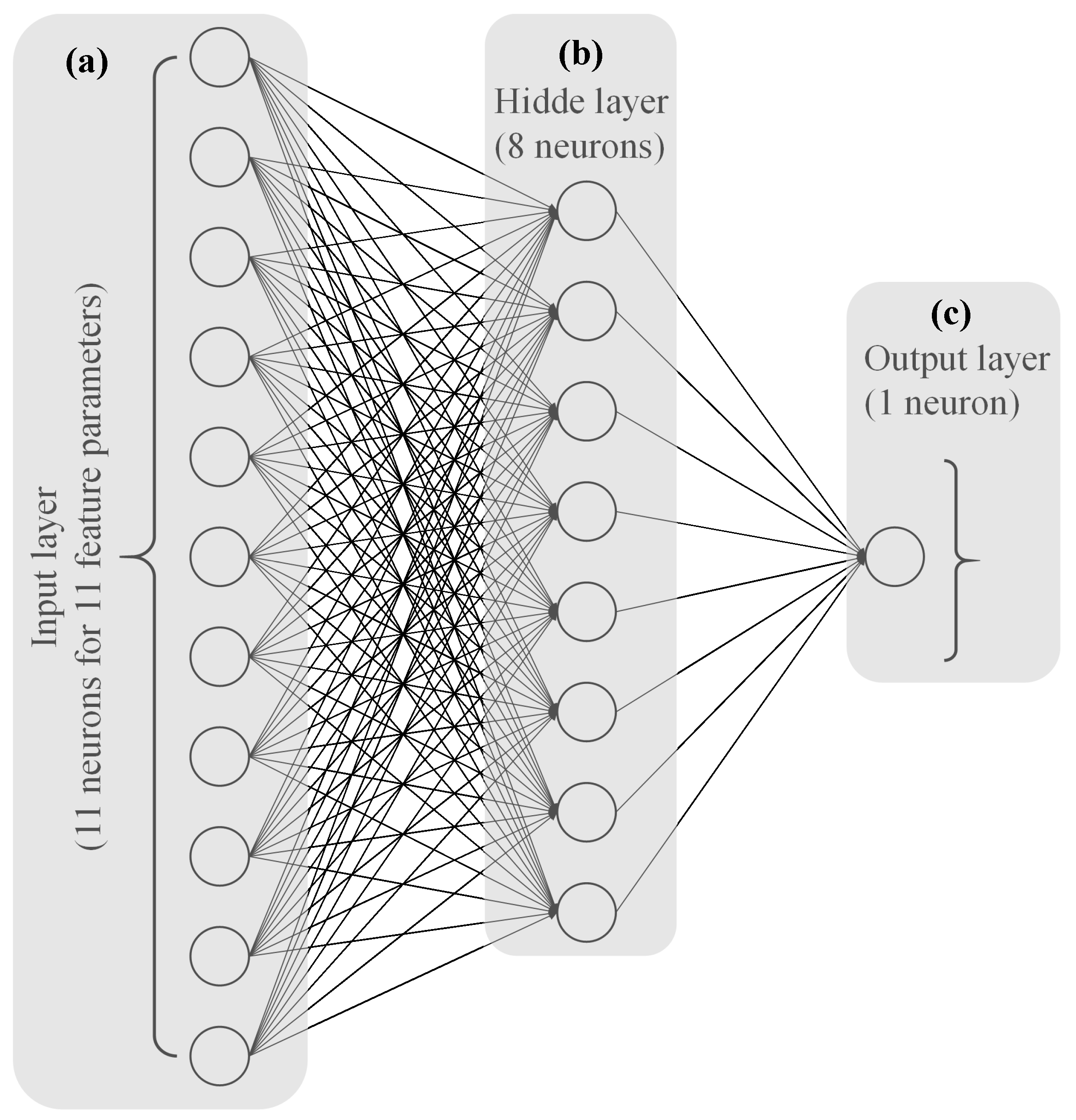
The structure of the BPNN is shown in
Figure 3, which includes an input layer with 11 neurons, a hidden layer with eight neurons, and an output layer with one neuron. The network receives 11 selected feature parameters of the FCEV during the driving process and outputs the identified traffic-condition type from the three predefined categories (UCT, USNT, and HCT). The 11 selected driving-feature parameters are listed in
Table 2.
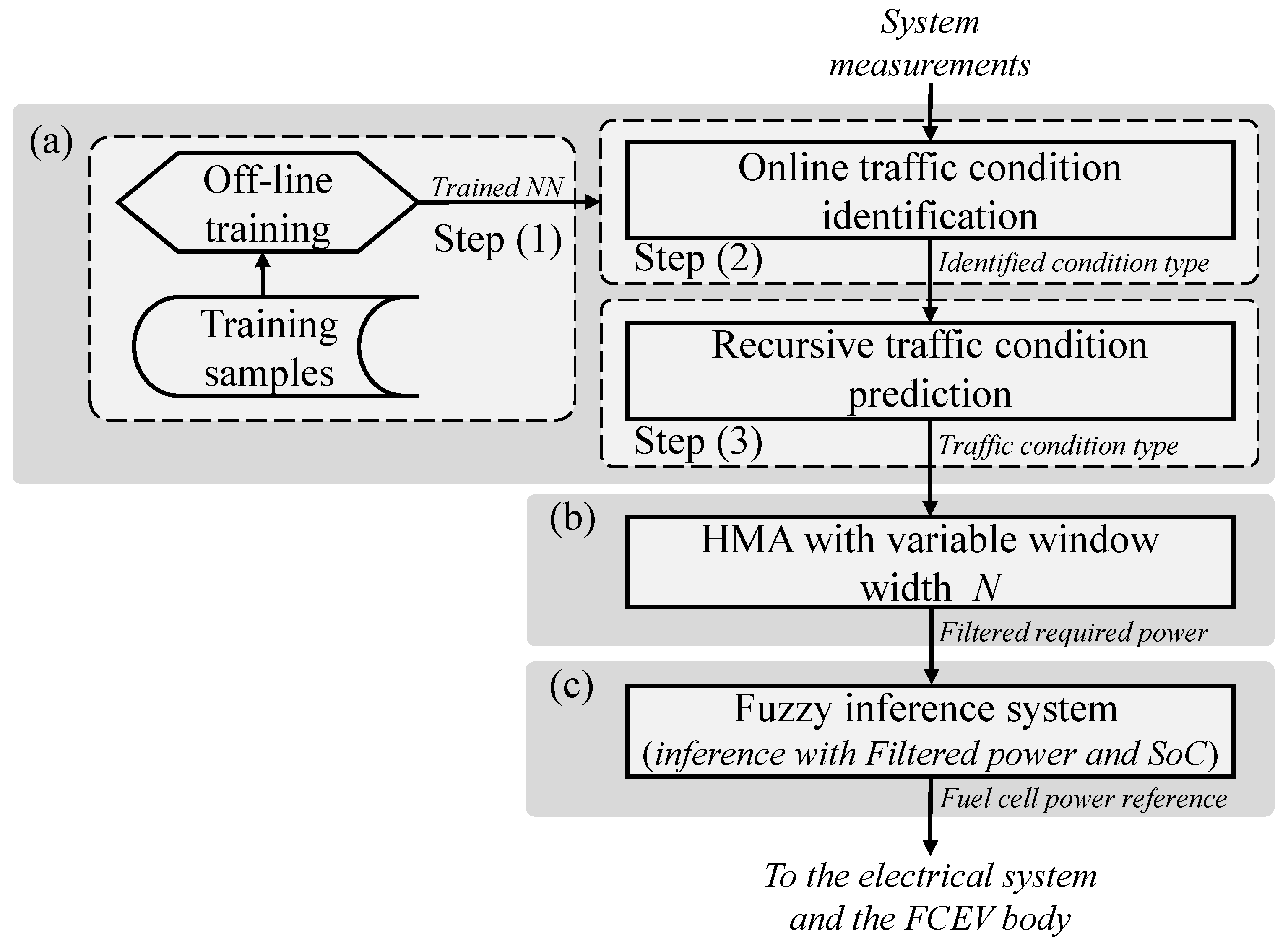
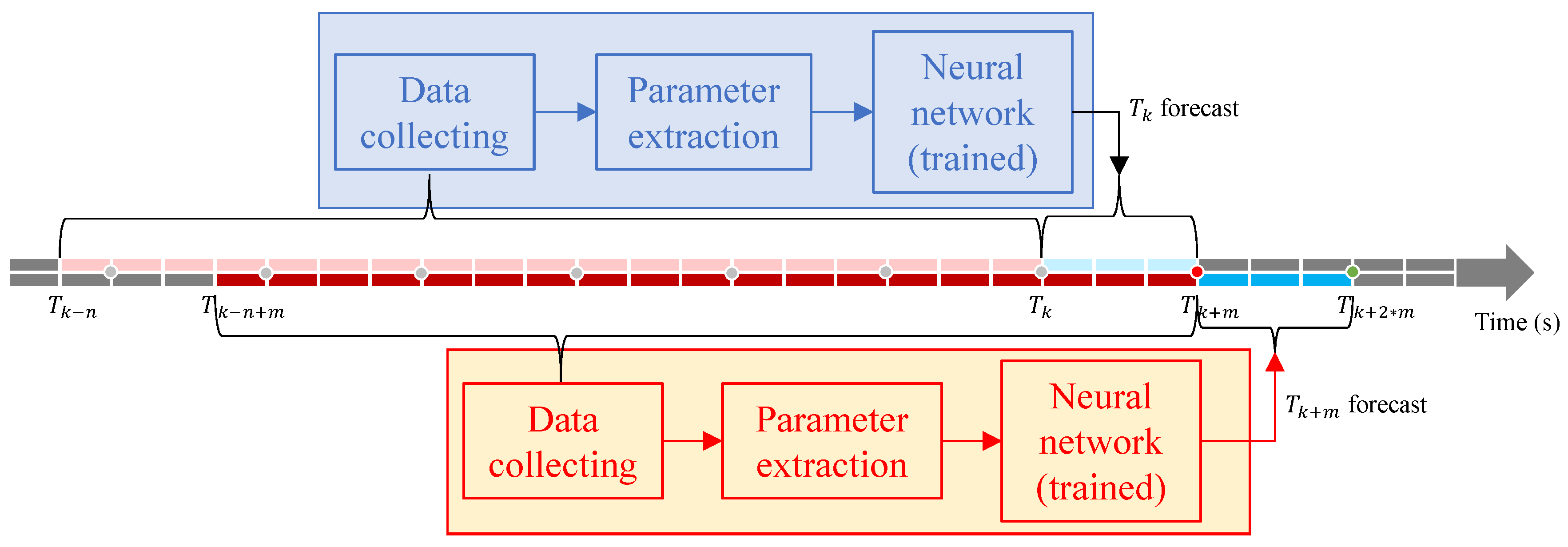
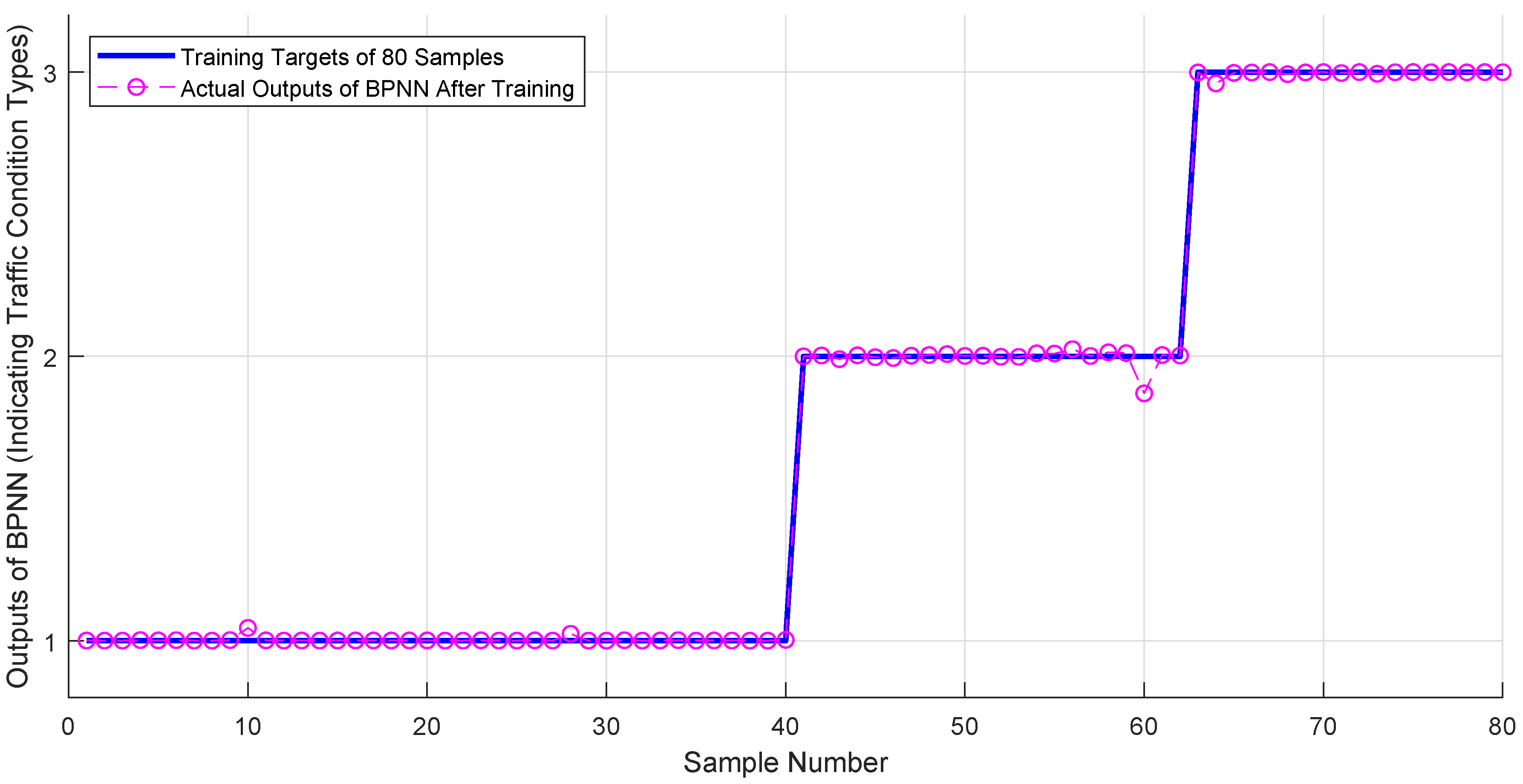
The working process of the BPNN-based traffic-condition-type prediction can be divided into three steps—(1) offline BPNN training; (2) online BPNN identification; and (3) recursive traffic-condition prediction.
In Step (1), the sample data of different road conditions are collected and used to train the BPNN offline with a back-propagation algorithm. After being trained, the BPNN becomes an approximation with high precision between selected driving parameters and traffic condition types. Then, in Step (2), the trained BPNN is used to identify the traffic condition online. In reality, traffic conditions normally gradually transition from one to another (although they may be frequent and fast); online identification is done every
m (
m is an integer and greater than 1) sampling periods instead of at each sampling instant. During identification, BPNN inputs are the 11 feature parameters calculated from the latest
n (
n is an integer and greater than 1) sampling data, and output is the recognition of the current driving-condition type. Finally, the identified traffic-condition type is used as the prediction result for the coming
m sampling period. A new online identification is repeated after
m sampling periods at the
m +
n sampling instant. This recurrent prediction process is illustrated in
Figure 4.
3.3. Hull-Moving-Average-Based Frequency Decoupling
During a real driving procedure, instantaneous high power is often required to rapidly speed up an FCEV. As discussed before, the output power characteristic of a fuel cell makes it difficult to meet this prompt high-power demand. To solve this problem, a frequency-decoupling method that can separate low-frequency components from demanded power by filtering high-frequency components is essential for the efficient operations of a hybrid-source-powered FCEV [
42,
43,
44]. The low-frequency components of the demanded power are fulfilled by the fuel cell, while high-frequency power requirements are satisfied by the battery.
A Moving Average (MA) algorithm can filter out high-frequency components and retain the low-frequency trend of a signal, and this makes the MA applicable to smooth the demanded power of an FCEV [
45]. Common MA algorithms include Simple MA (SMA), Weighted MA (WMA), Exponential MA (EMA) and Hull MA (HWA).
The SMA, essentially a low-pass filter, calculates the mean value of the data within a filter window (with a window width of
N) and takes this average as a filtered value. The SMA assigns the same weight to all data in the window and results in an obvious filtering lag. Larger filter window width
N leads to a smoother filtering output but increases filtering lag, which reduces frequency-decoupling performance [
45]. To address this filtering-lag problem, WMA and EMA algorithms were developed by assigning bigger weights to more recent data, and smaller weights to far-off data in the window with linear and exponential calculations, respectively [
46]. For example, the calculation equation of the WMA is as follows:
where
is the value of a time sequence at time
k, and
is the average value of
after a WMA calculation with a window width of
N.
It can be seen from Equation (1) that most recent data are multiplied by the biggest weight of N, while earliest value is multiplied by the smallest weight of 1. This mechanism improves the trend-tracking capability of the filter and decreases lag but the disadvantages of the WMA and EMA are that assigned weights and window width are normally constants for the whole time series.
The HMA algorithm can improve the above insufficiency by carrying out calculations shown in Equation (1) threefold with different filter-window widths; smoother filtering results can be obtained with decreased filtering lag. Accordingly, the HMA algorithm was adopted in this paper for the demanded power-frequency decoupling, and its calculation procedure has the four following steps [
47].
Step 1: HMA calculates a WMA with Equation (1) with a period of
.
Step 2: The HMA calculates a WMA with a period of
N.
Step 3: A new data series is generated with the results of Steps 1 and 2.
Step 4: HMA calculates a WMA with a period of
on the new data series.
In the HMA algorithm, filter-window width
N is a significant parameter determining the filtering effect. The value of
N is connected with the signal characteristics and a well-selected value can result in smoother filtering output with reduced filtering lag. For example, the demanded power to drive an FCEV in the HCT has fewer fluctuations and large amplitude. To process this signal with HMA, a smaller value of
N can be chosen to compromise between signal smoothing and filtering lag. For the demanded driving power in UCT, on the other hand, power has more variations with relatively small amplitudes; in this case, a bigger value of
N can be selected to smooth the filtering result. In the case of driving in a USNT, a power signal with medium fluctuations and moderate amplitudes should be filtered with a value of
N between the two situations above. Therefore, an
N value and traffic-condition type are closely connected with the required driving power of this traffic-condition type; if a value of
N is well-selected for a particular traffic-condition type, a better power-filtering result can be obtained. On the basis of this observation and the summary of comparison simulation results during our research process, the selected
N values in different traffic-condition types are listed in
Table 3.
According to
Table 3, in each-frequency decoupling process, HMA filter-window width
N is adjusted by the traffic condition forecasted by the BPNN to improve the filtering effect and the adaptability of the EMS to various driving conditions.
3.4. Fuzzy-Inference-System-Based Fuel-Cell Energy Management
The HMA-based frequency-decoupling method retains the low-frequency components of the demanded power for the fuel cell to match its load characteristic, and leaves high-frequency power to the battery. Although the traffic-condition-adapted window-width adjustment is adopted in the HMA, it still has to manage the hybrid-power sources. This algorithm only considers the output-power characteristics of the two power sources in the frequency domain and does not take battery SoC maintenance into account.
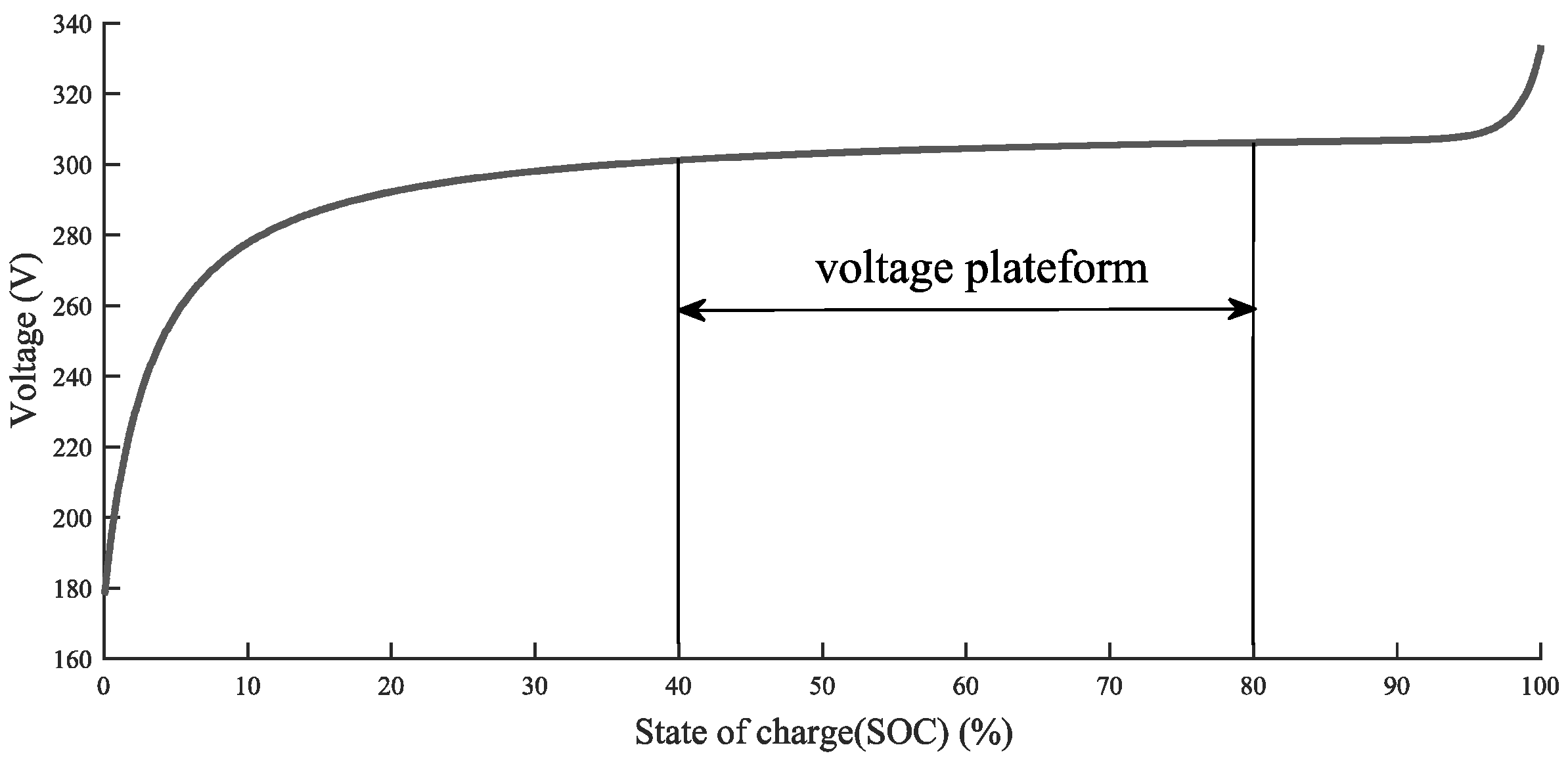
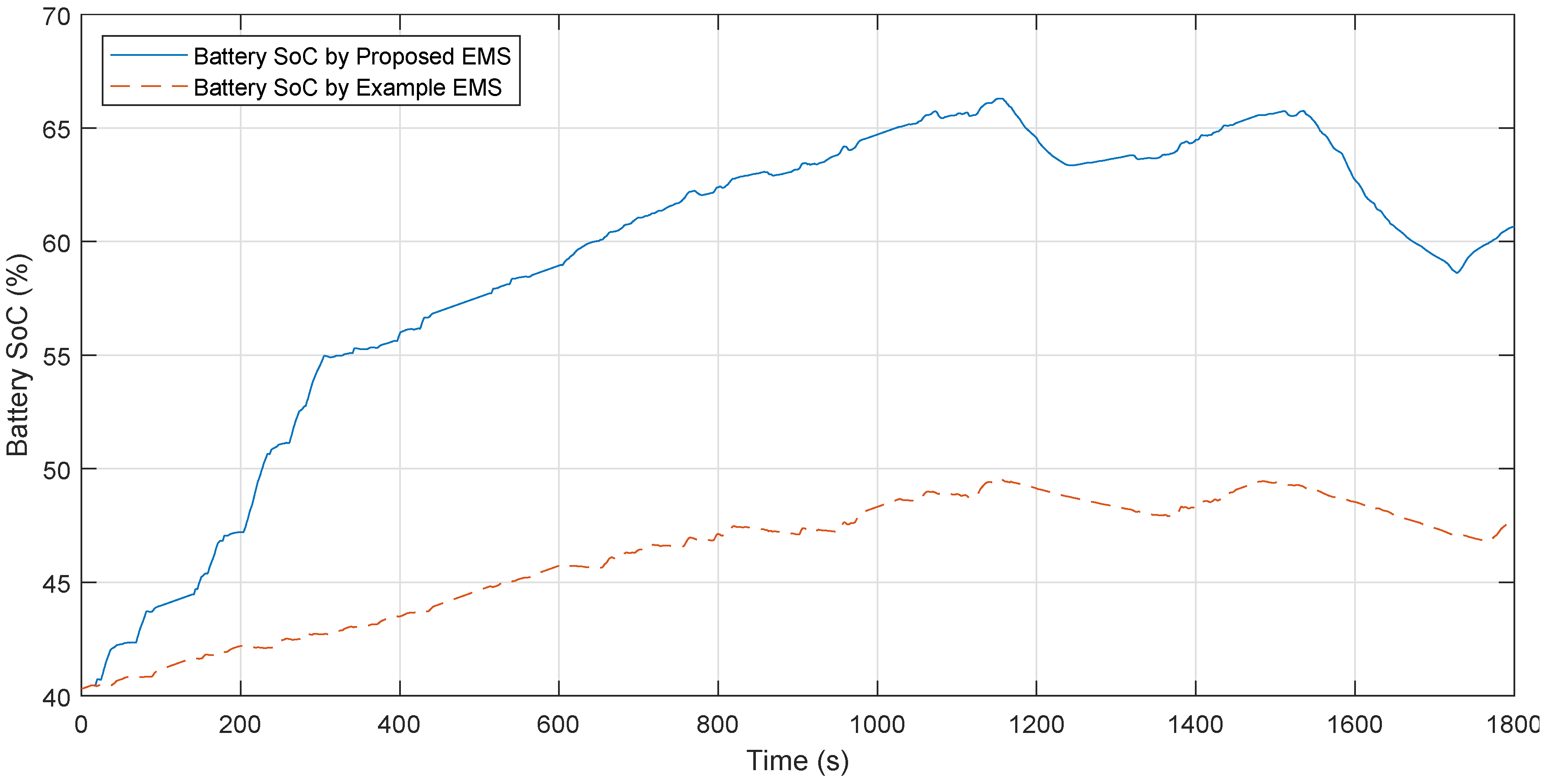
The SoC is an essential parameter of a battery, and it is normally used as an indicator of the amount of remaining energy as compared with its fully charged amount in percentage. Consider that the battery should always be well-protected to avoid overcharging or overdischarging, the SoC should be maintained within an allowed range to prevent possible damage. Another consideration is that, in the hybrid-power supply of the FCEV shown in
Figure 1, the battery is directly connected to the DC bus without any converter. In this case, the battery needs to keep the output voltage as stable as possible to support the DC bus voltage with variable SoC. According to the voltage/SoC characteristic of a battery, if the battery’s voltage platform needs to be maintained, the SoC should be kept in a particular range. An example of the voltage platform with a battery of 288 V and 14 Ah is shown in
Figure 5 [
48]. From this figure, it can be seen that SoC maintenance range is 40%–80% to maintain the voltage platform; if the SoC goes beyond this range, output voltage apparently increases or decreases. Accordingly, for battery protection and DC bus voltage support, the battery SoC is considered be bounded within the above range by the EMS proposed in this paper.
An FIS was shown to be efficient in the energy-management applications for its intelligence and model free advantages [
49]. Therefore, an FIS was adopted as the last stage of the proposed EMS. As can be seen in
Figure 2, during the working flow of the proposed EMS, the filtering result of the demanded power, which corresponds to its low-frequency components, by the HMA is given to a fuzzy system for inference; the second input of the FIS is the estimated SoC of the battery. After the fuzzification, fuzzy-implication-calculation and defuzzification processes, a power reference is generated by the FIS for the fuel cell and its DC/DC converter to control its output power. Meanwhile, inadequate power with high-frequency dynamics is calculated and supplied by the battery to keep the power balanced.
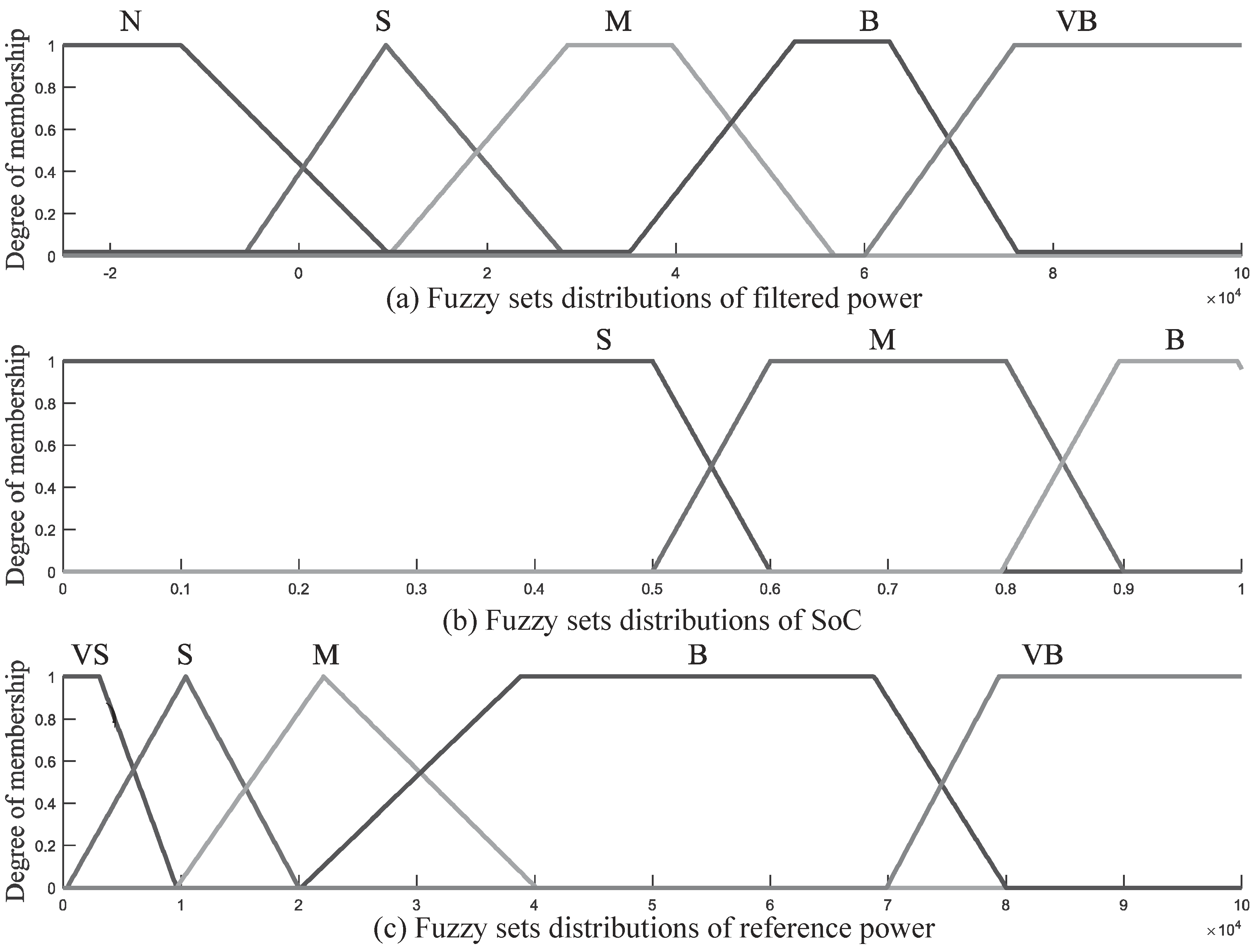
To realize fuzzification, the first input of the FIS, noted as
, which stands for the low-frequency components of the demanded power, is divided into five fuzzy sets; the second input, noted as SoC, which represents the state of charge of the battery, is divided into three fuzzy sets. The output of the FIS, noted as
, which denotes the reference power of the fuel cell, is also divided into five fuzzy sets. The selected membership functions and the fuzzy-set distributions are shown in
Figure 6.
With these fuzzy sets, 15 fuzzy inference rules in the IF-THEN form were designed as follows.
IF is N and SoC is S, THEN is VS;
IF is N and SoC is M, THEN is VS;
IF is N and SoC is B, THEN is VS;
IF is S and SoC is S, THEN is M;
IF is S and SoC is M, THEN is S;
IF is S and SoC is B, THEN is VS;
IF is M and SoC is S, THEN is B;
IF is M and SoC is M, THEN is M;
IF is M and SoC is B, THEN is S;
IF is B and SoC is S, THEN is B;
IF is B and SoC is M, THEN is B;
IF is B and SoC is B, THEN is M;
IF is VB and SoC is S, THEN is VB;
IF is VB and SoC is M, THEN is VB;
IF is VB and SoC is B, THEN is M;
Mamdani inference was adopted to realize the implication calculation, and a centroid defuzzification method was applied to convert the inference result from a fuzzy value to an accurate one. Centroid defuzzification is expressed with the following equation [
50].
where
x is a linguistic variable,
is the membership value of
x in a fuzzy set
A, and
u is the crisp value after the defuzzification.
5. Conclusions and Future Studies
This paper proposed a novel energy-management method combining the neural-network technique, the hull moving-average algorithm and the fuzzy-inference system to realize traffic-condition-based energy management for an FCEV powered by a fuel cell and a battery.
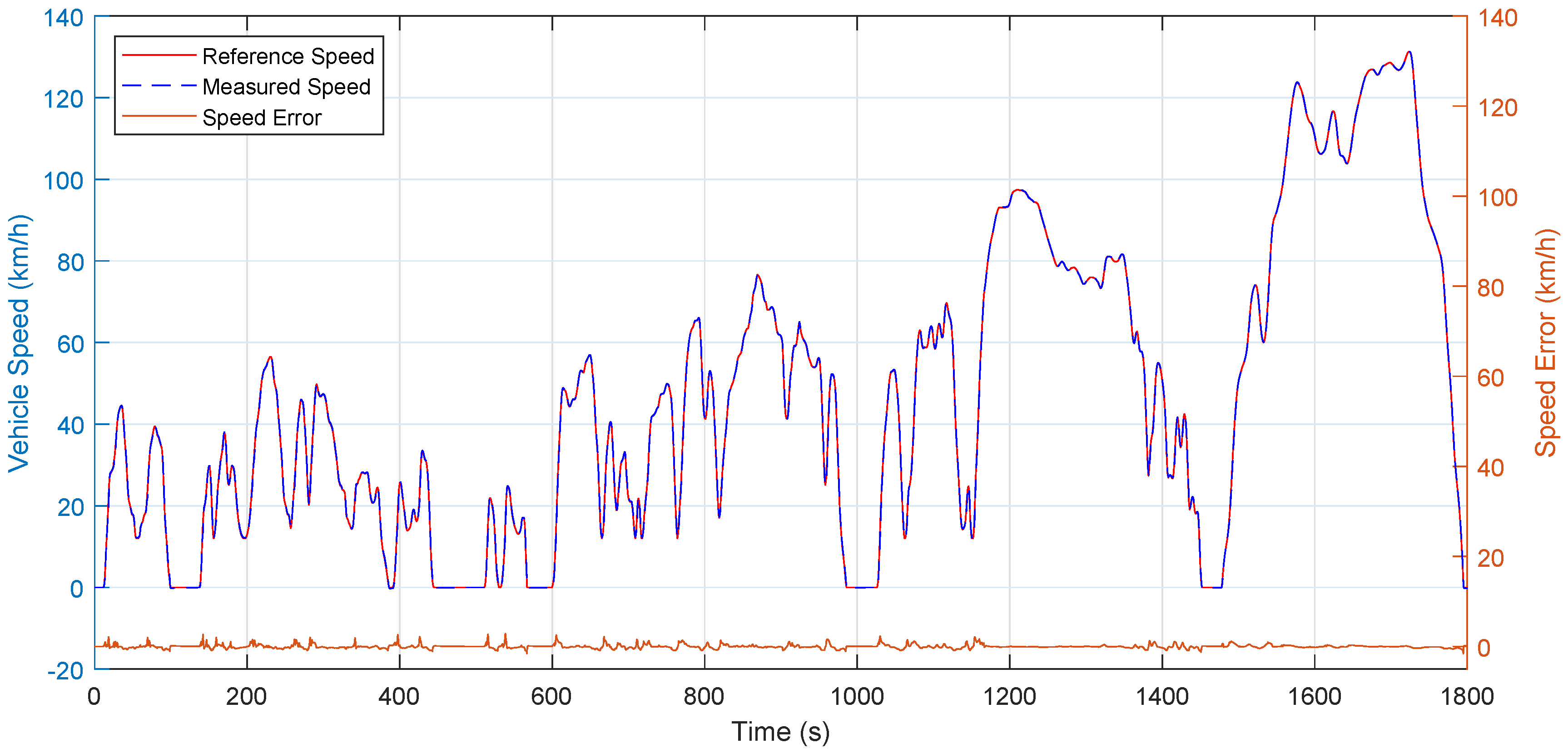
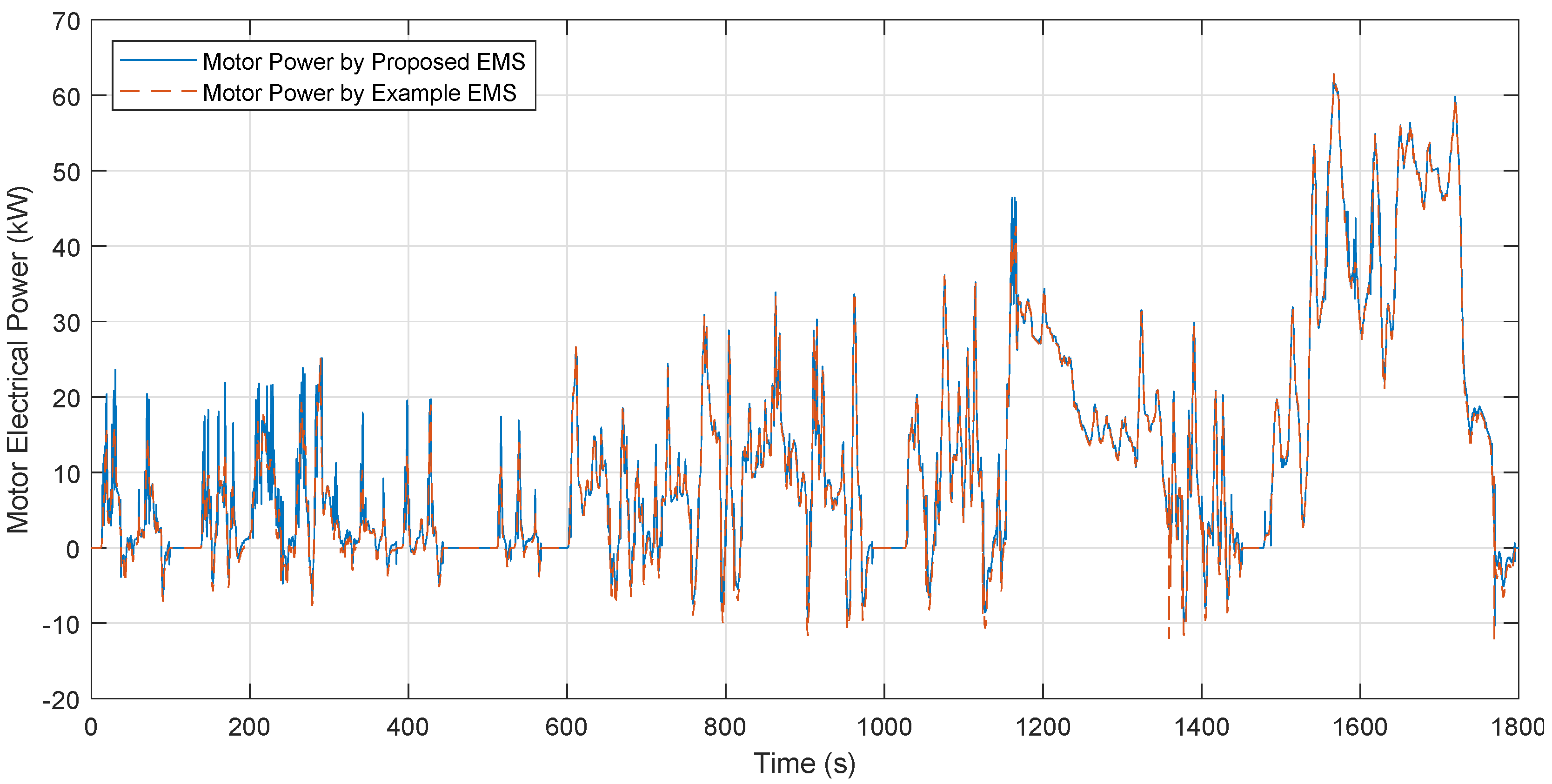
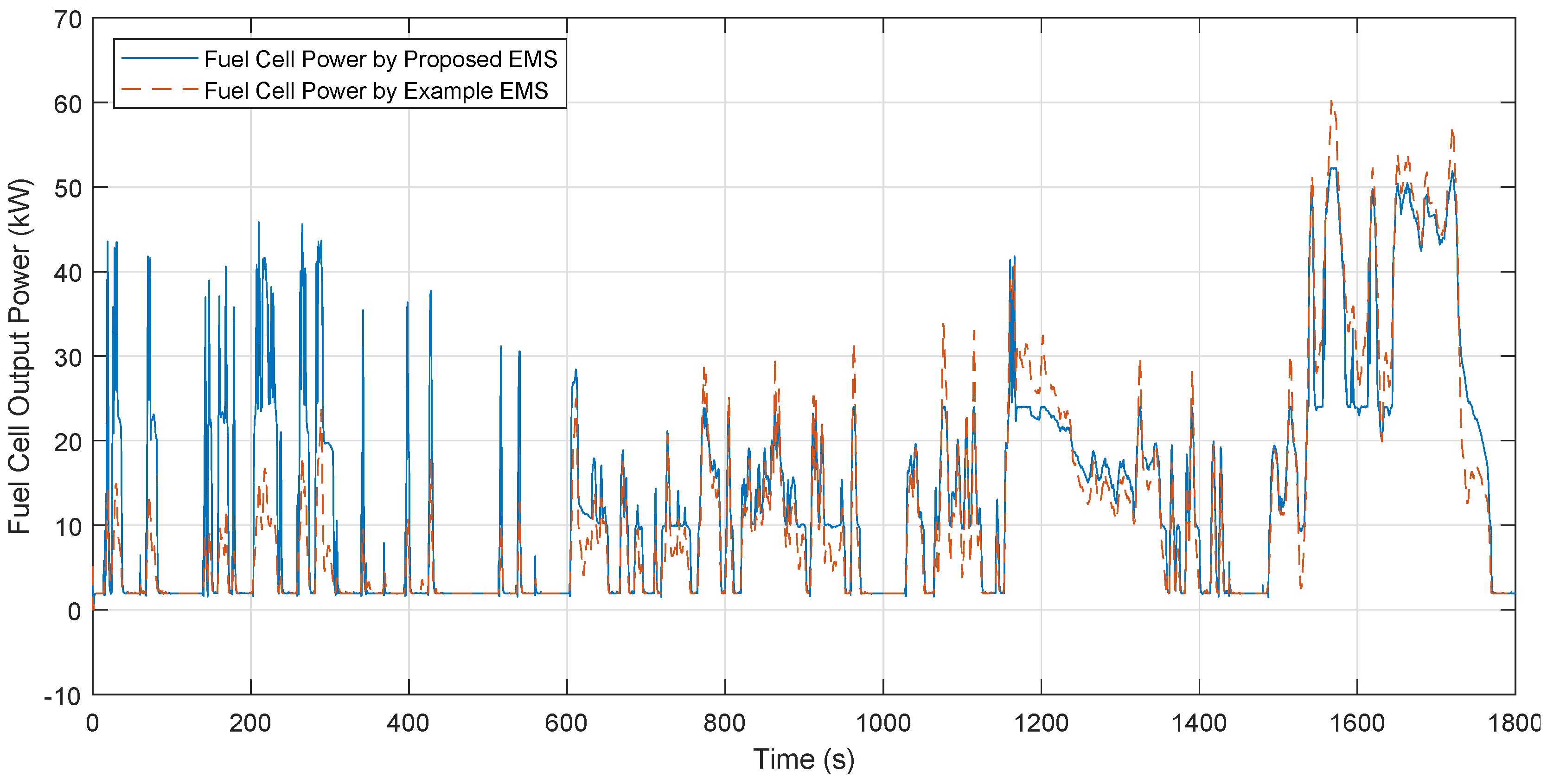
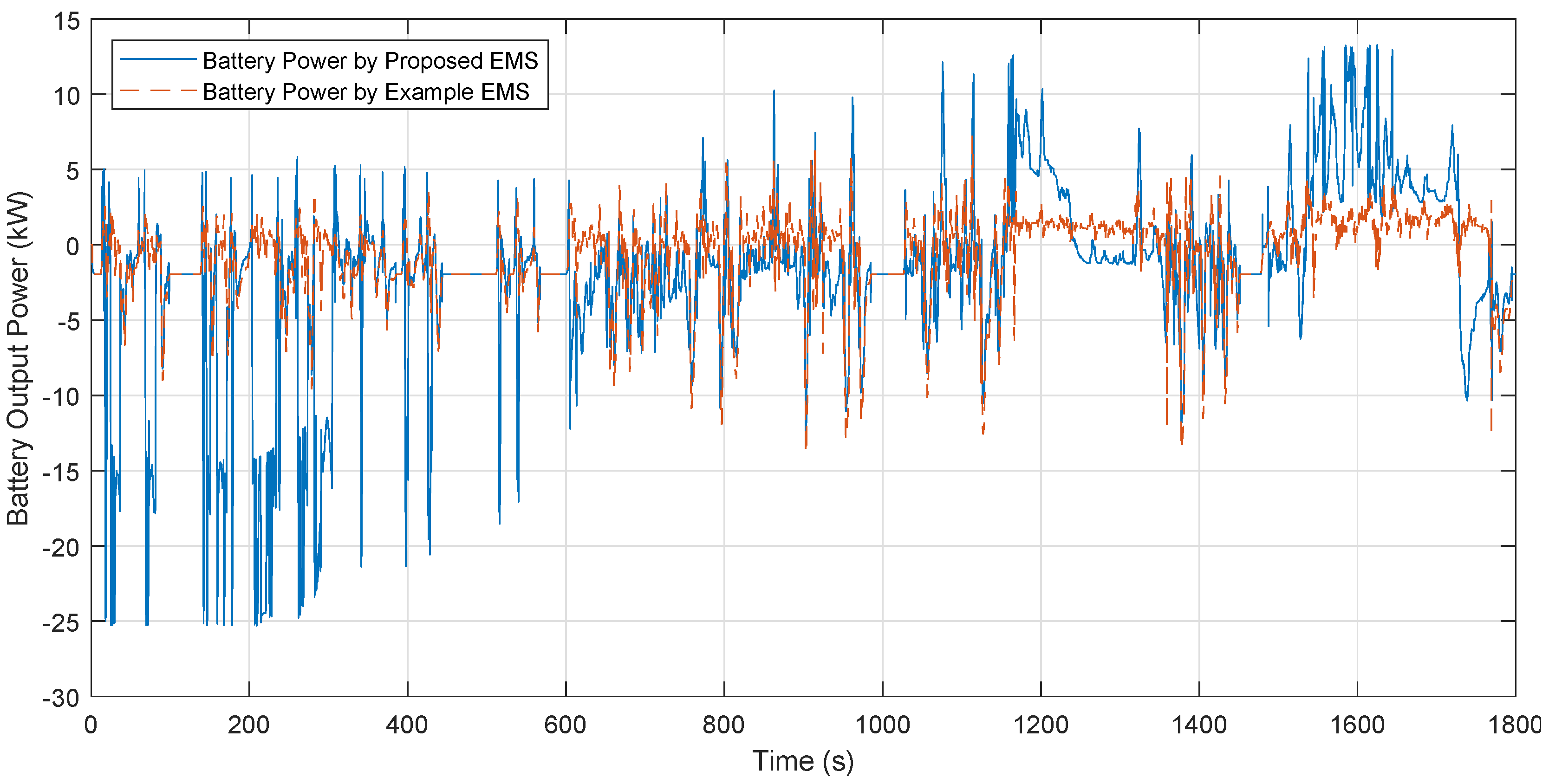
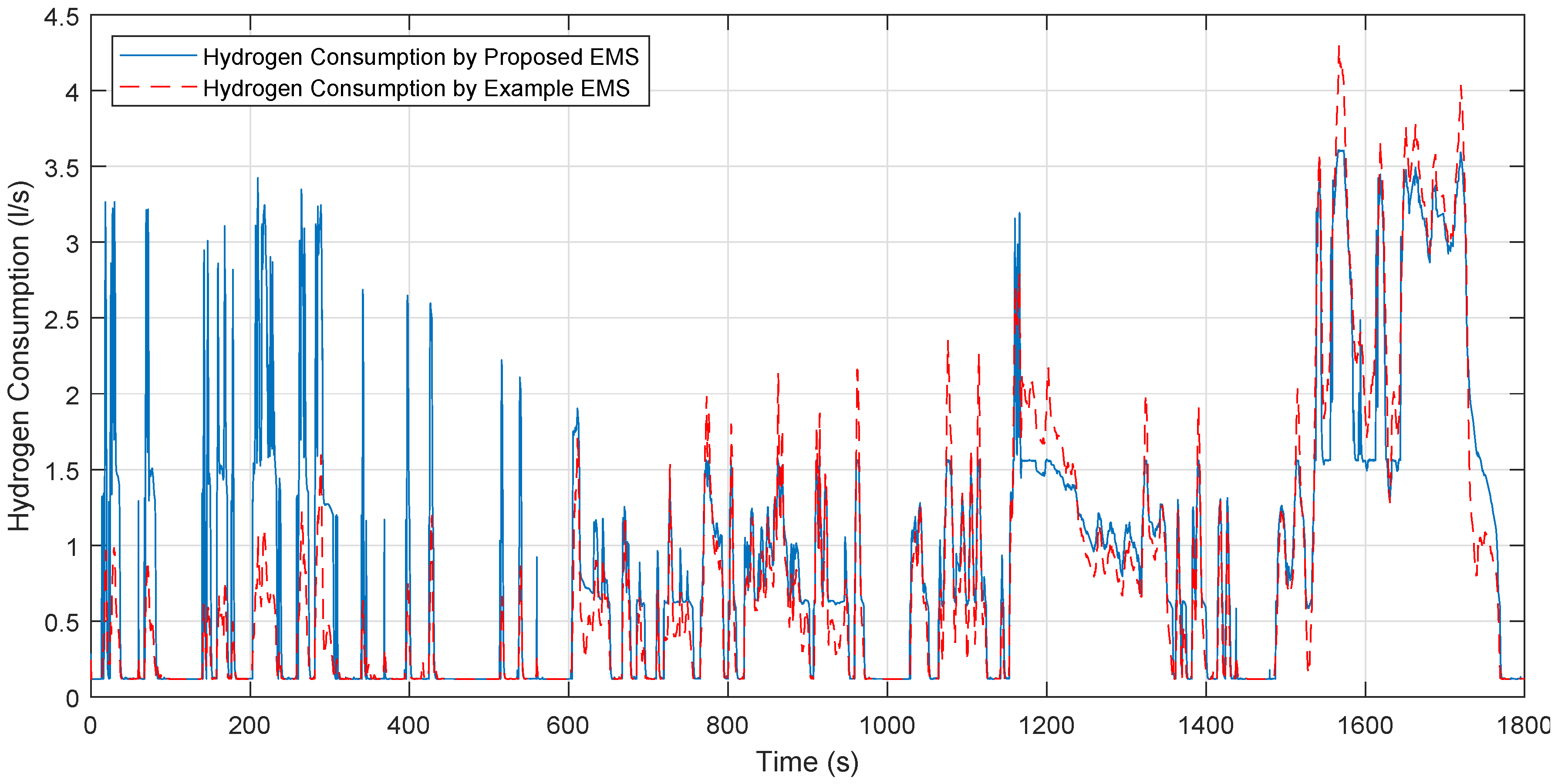
In this method, a BPNN was designed to identify and predict the traffic-condition type and the predicted result was used to adjust the width of the HMA filter window; with this parameter-adaptive mechanism, the HMA filtering effect could be improved to adapt to different power demands in various driving conditions. The filtering result keeps the low-frequency parts of the demanded power with consideration of the traffic situation and is then forwarded to an FIS. The FIS employs the fuzzified values of the filtered power and the estimated battery SoC for fuzzy-implication calculations and obtains the reference power of the fuel cell. The rest of the demanded power with high-frequency parts is undertaken by the battery; meanwhile, the SoC of the battery can be maintained within a particular range for battery protection. Finally, a simulation platform was built on the basis of the FCVPT example. The same WLTP test cycle was applied to this simulation platform with the proposed EMS and to the example with its own EMS for comparison simulations. Simulation results were analyzed to verify the effectiveness of the proposed EMS.
The proposed EMS has the advantages of simple calculation and good adaptability, which can deal with deficiencies of existing frequency-decoupling- or fuzzy-logic-based energy-management methods. However, there are still problems open for further research and discussion, such as computational-complexity analysis of the proposed method to validate its availability for practical real-time applications; and battery lifetime should be given more consideration in the proposed EMS to compromise for charging/discharging cycles with the wider SoC variation range. These problems will be important research targets for further studies.

 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}