Partial Discharge Pattern Recognition of Gas-Insulated Switchgear via a Light-Scale Convolutional Neural Network


Abstract
:1. Introduction
2. Proposed Method
2.1. Data Enhancement with Conditional Variation Auto-Encoder
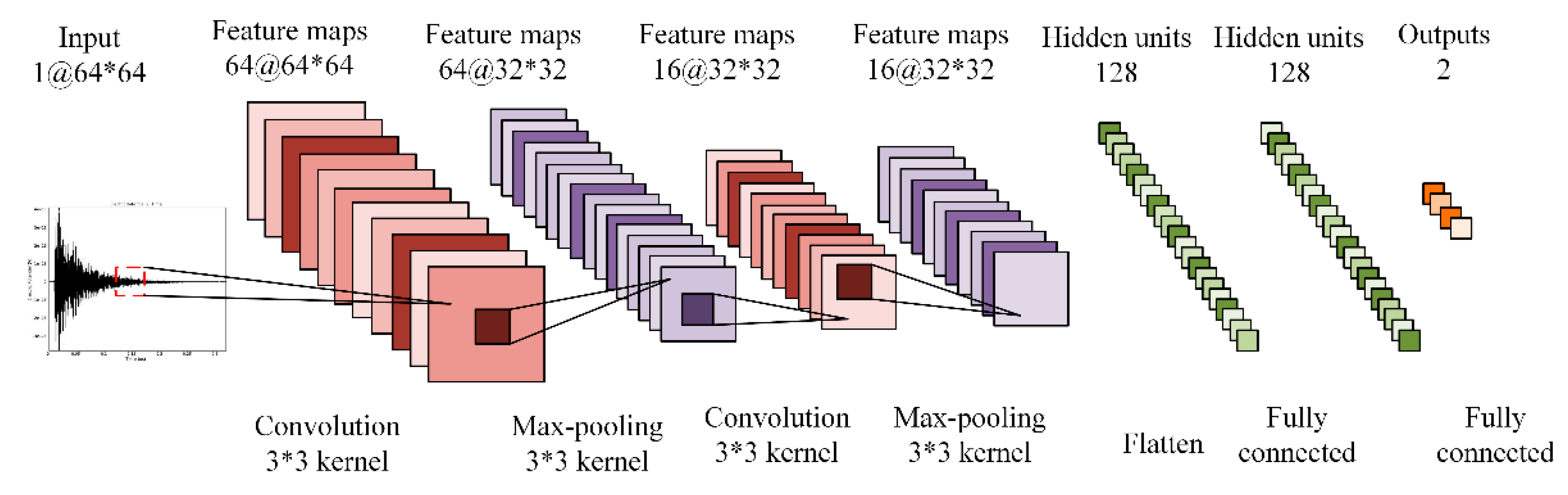
2.2. Convolutional Neural Network
2.3. Convolutional Neural Network
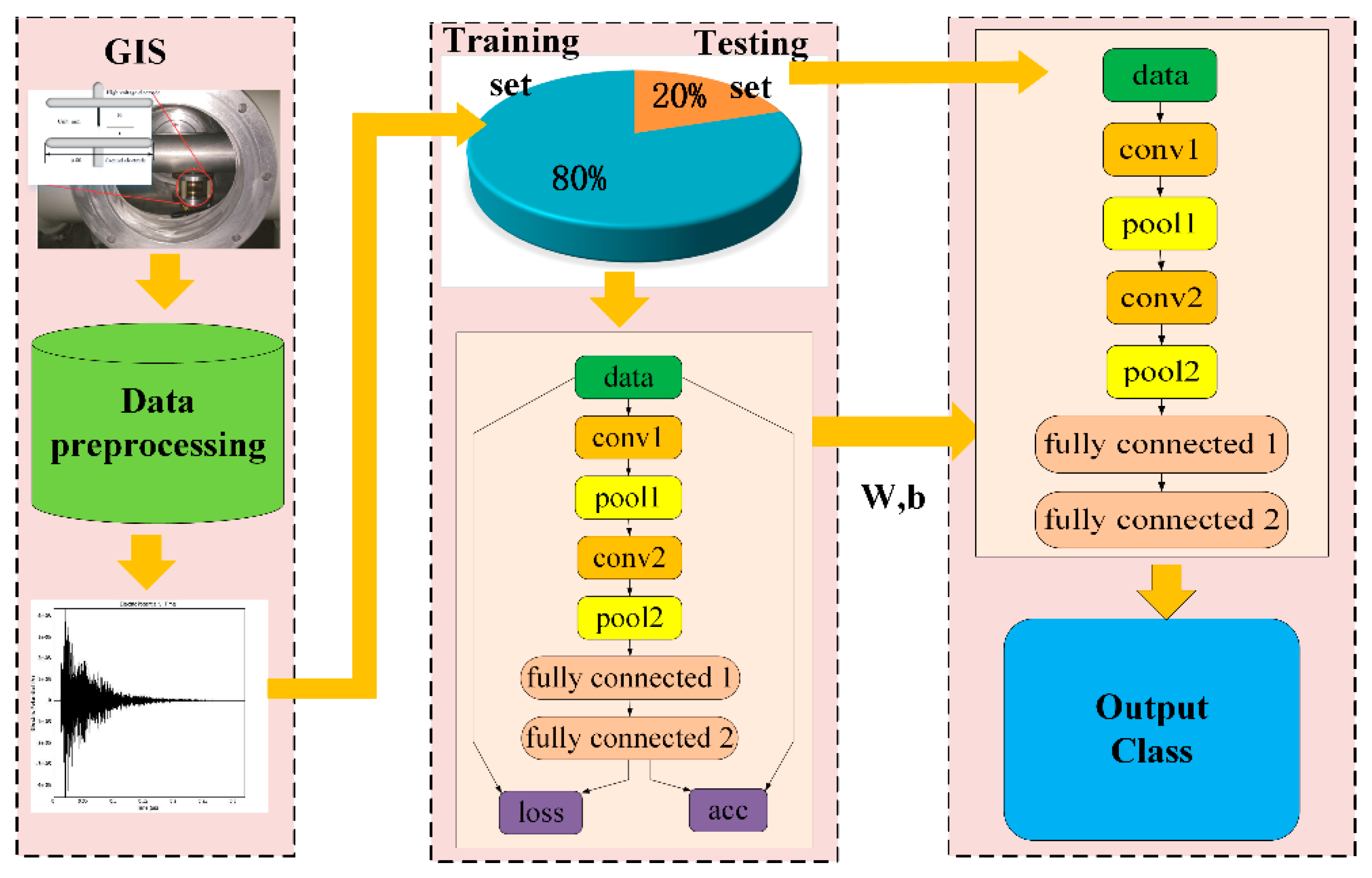
3. GIS PD Pattern Recognition Using Light-Scale Convolutional Neural Network
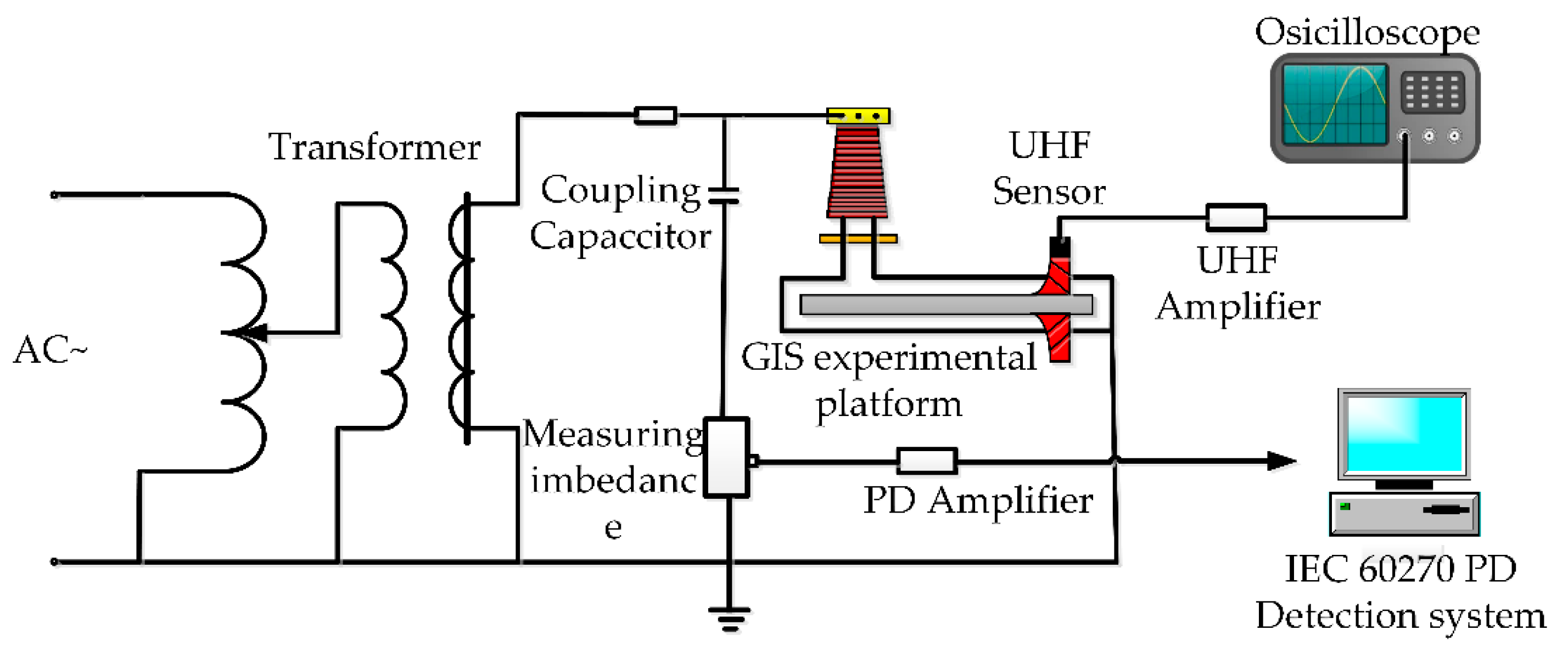
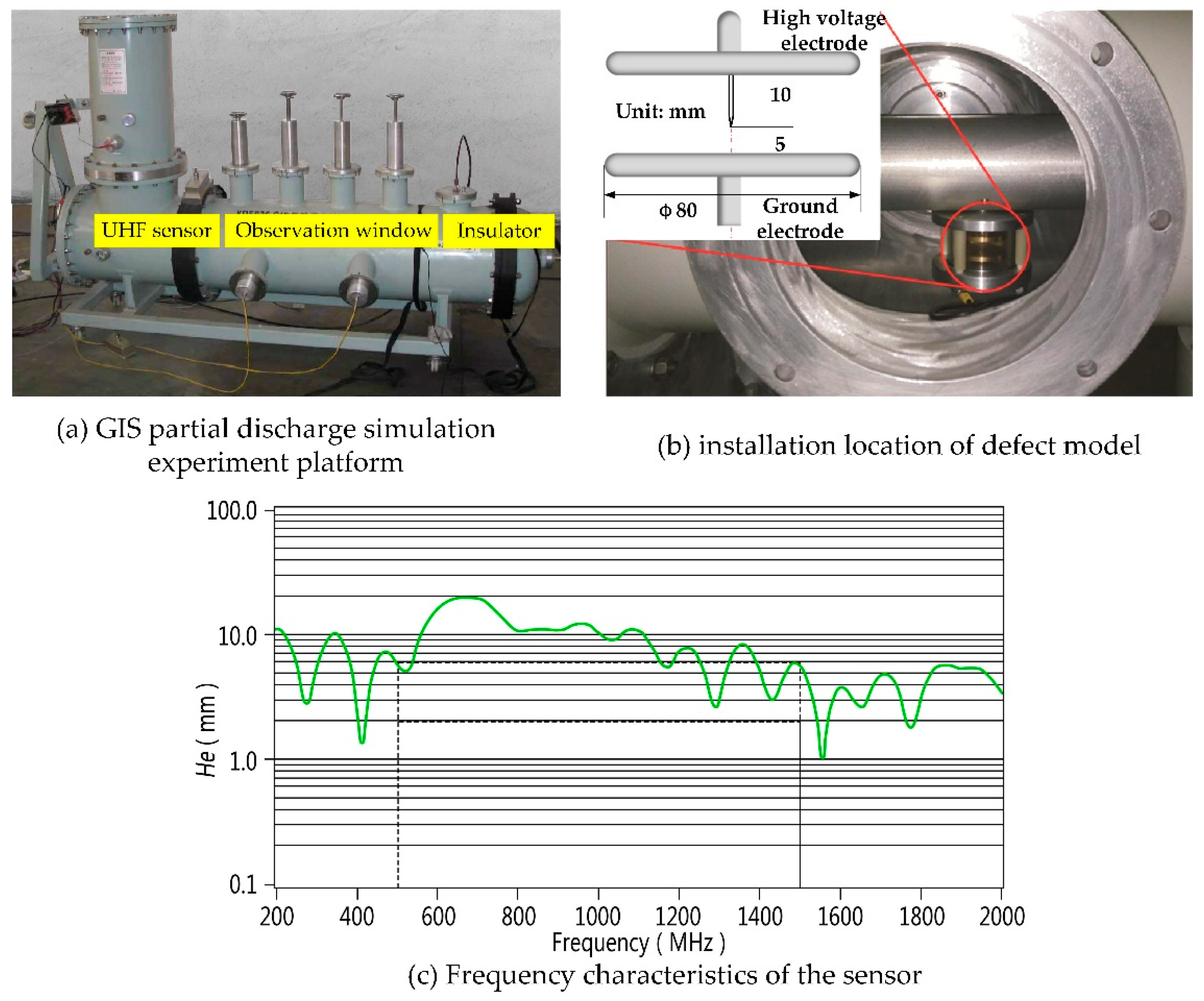
4. Data Acquisition
5. Results and Analysis
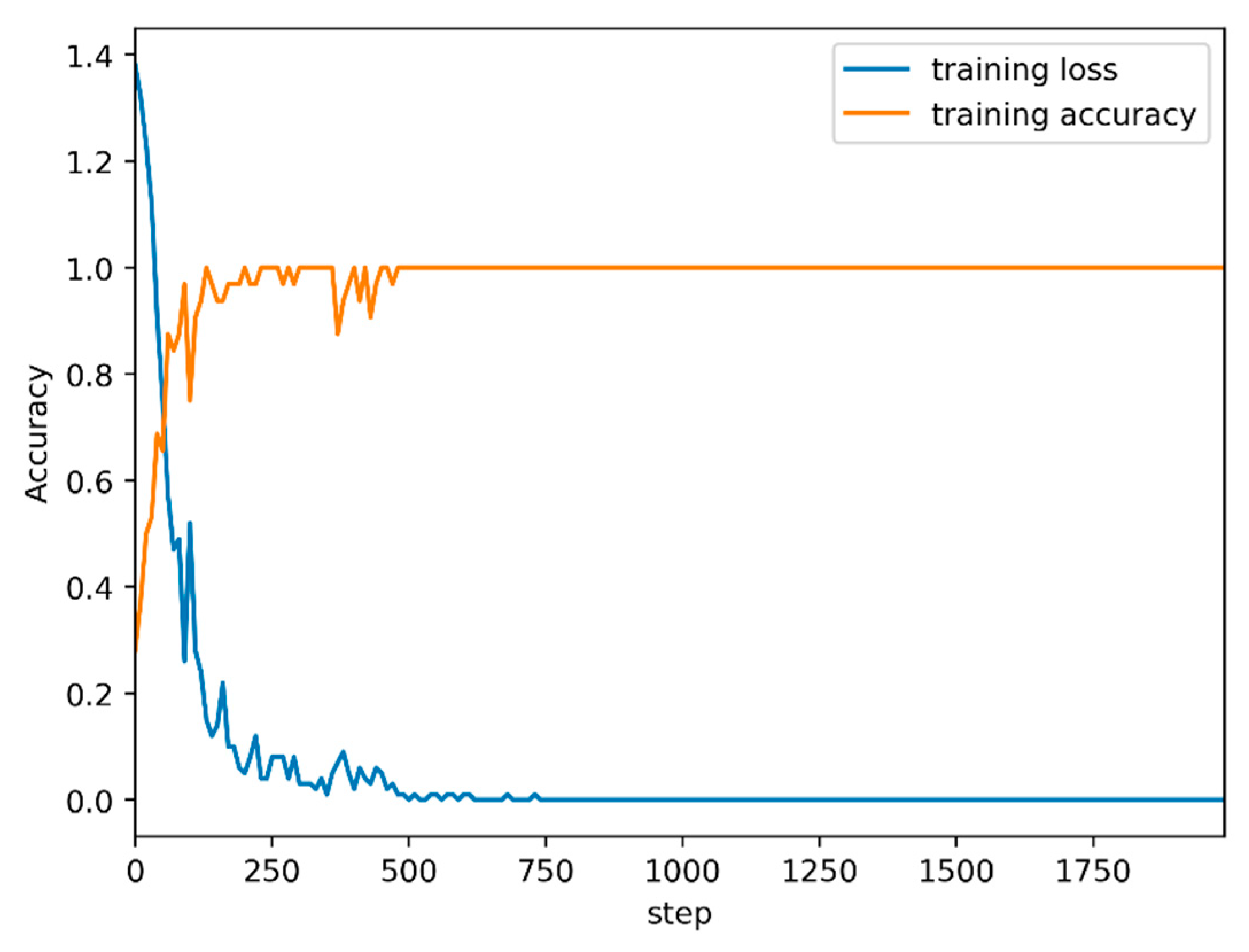
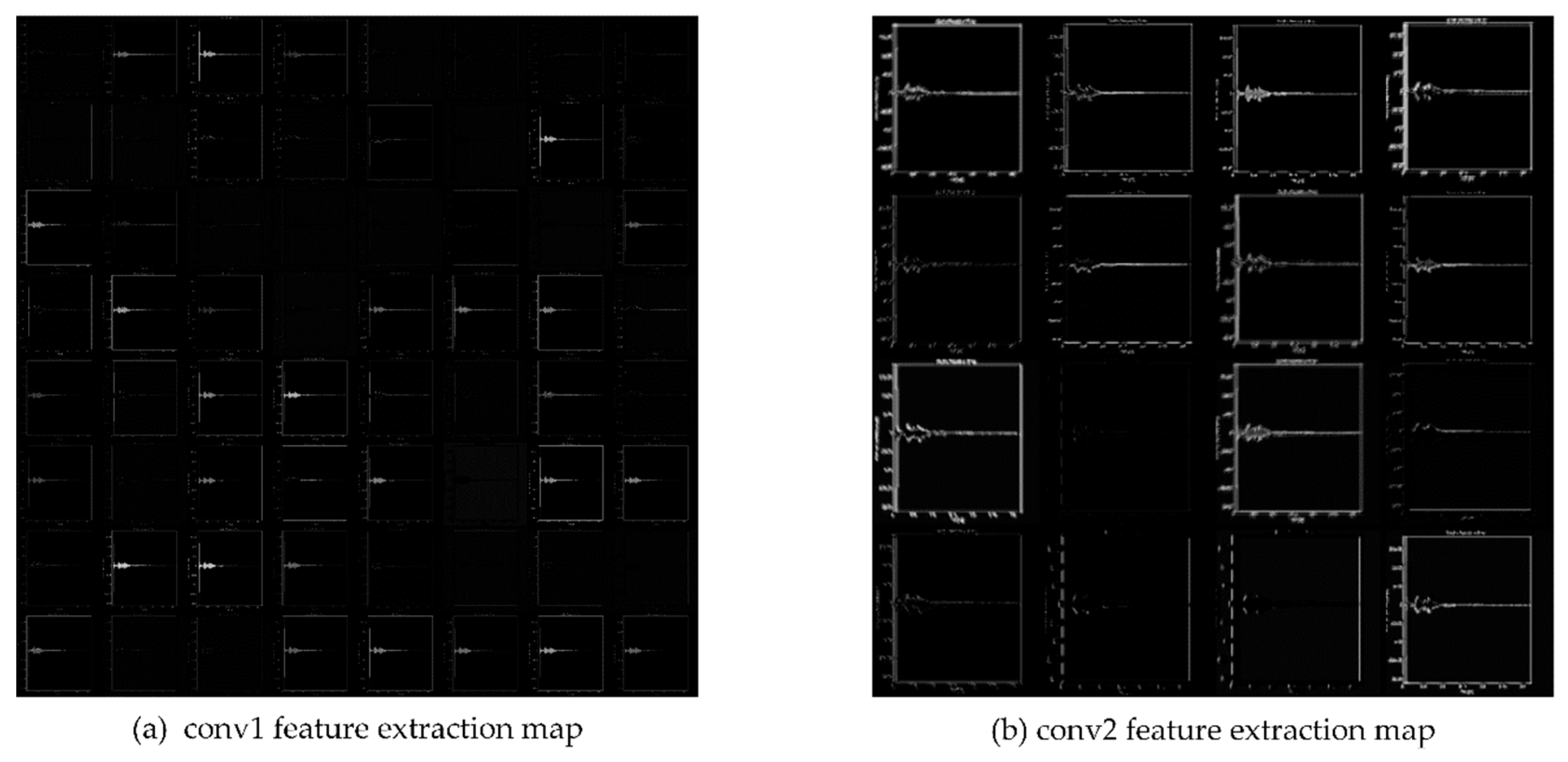
5.1. Model Training and Visualization
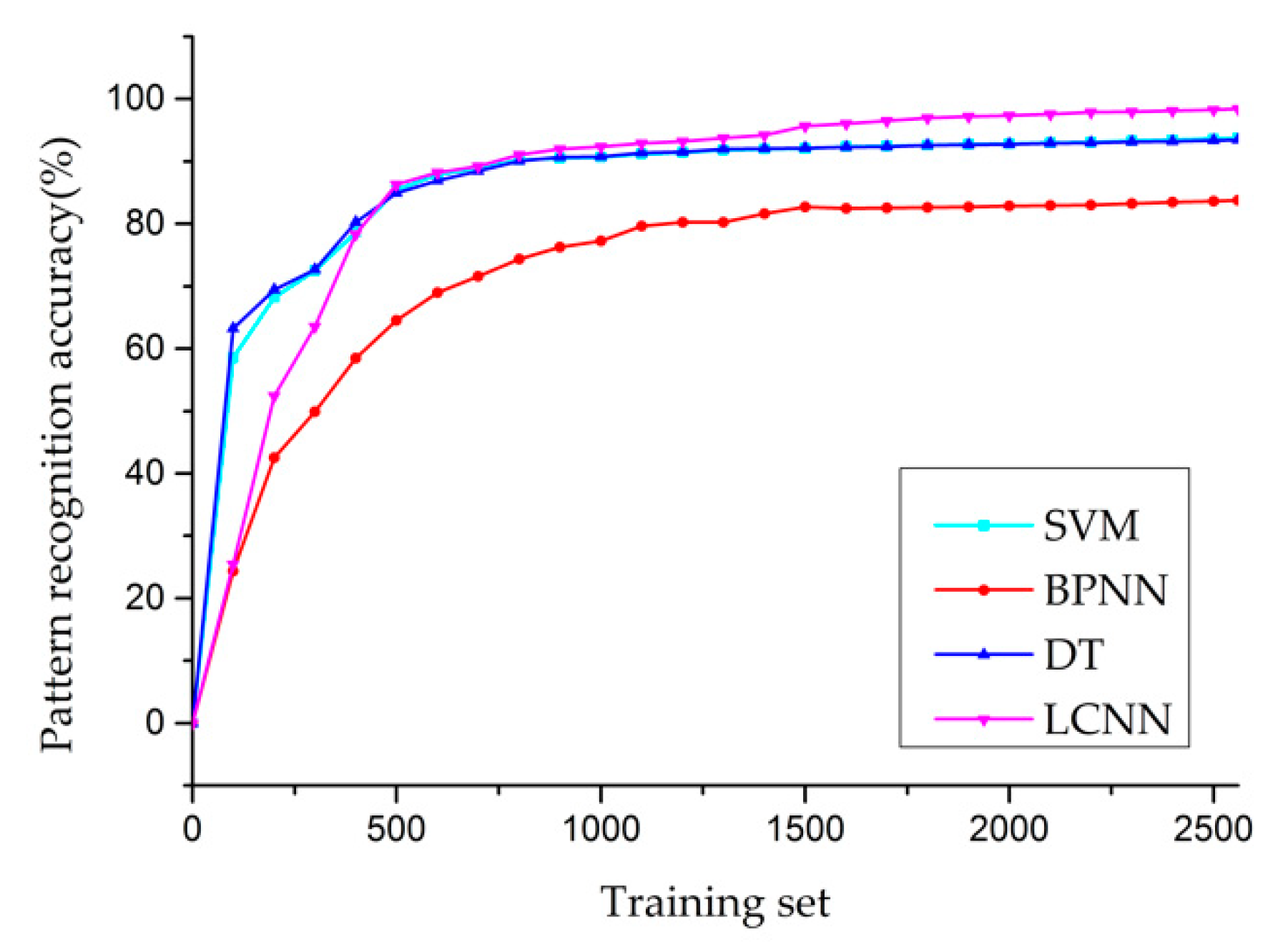
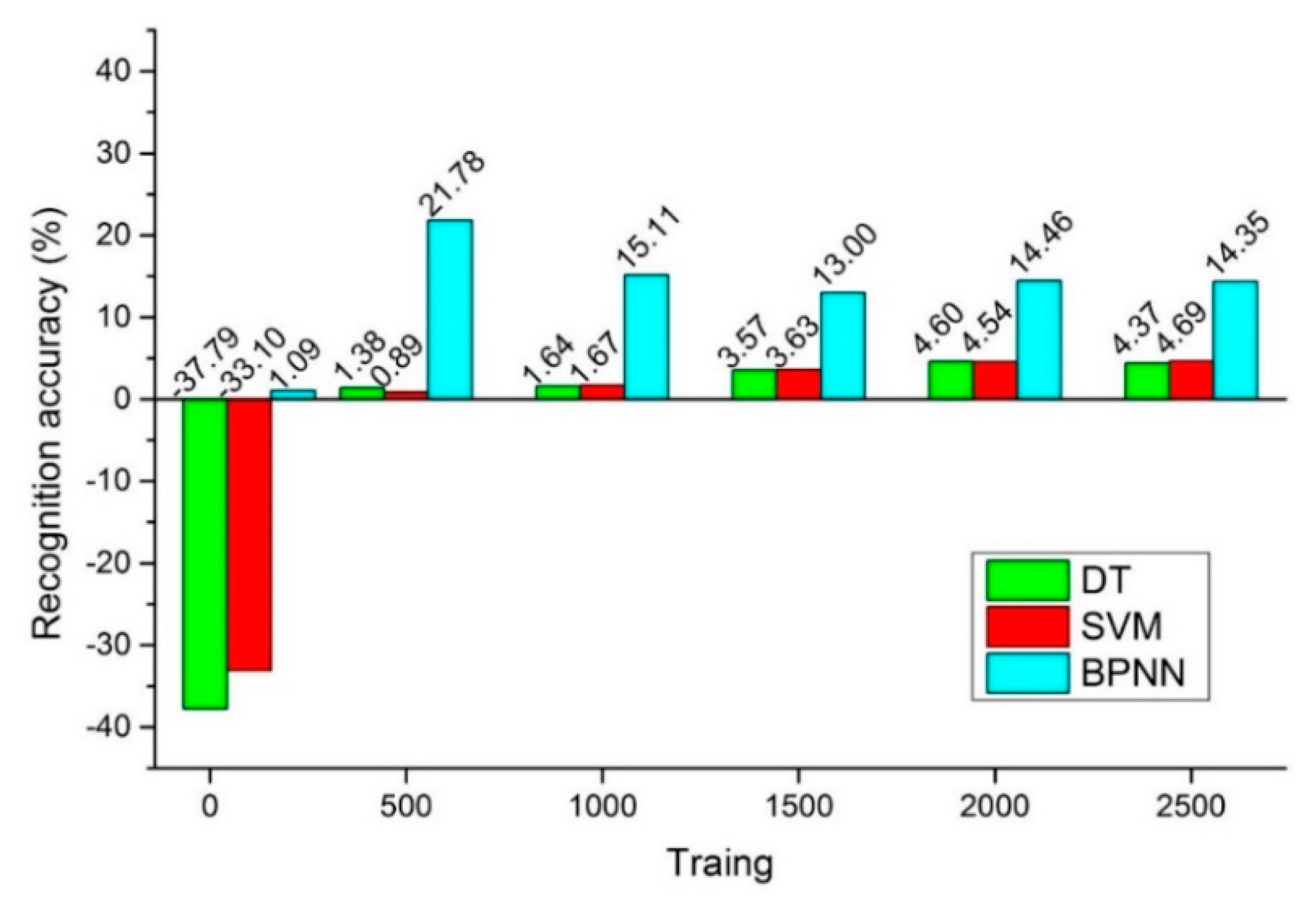
5.2. Accuracy Analysis of Pattern Recognition
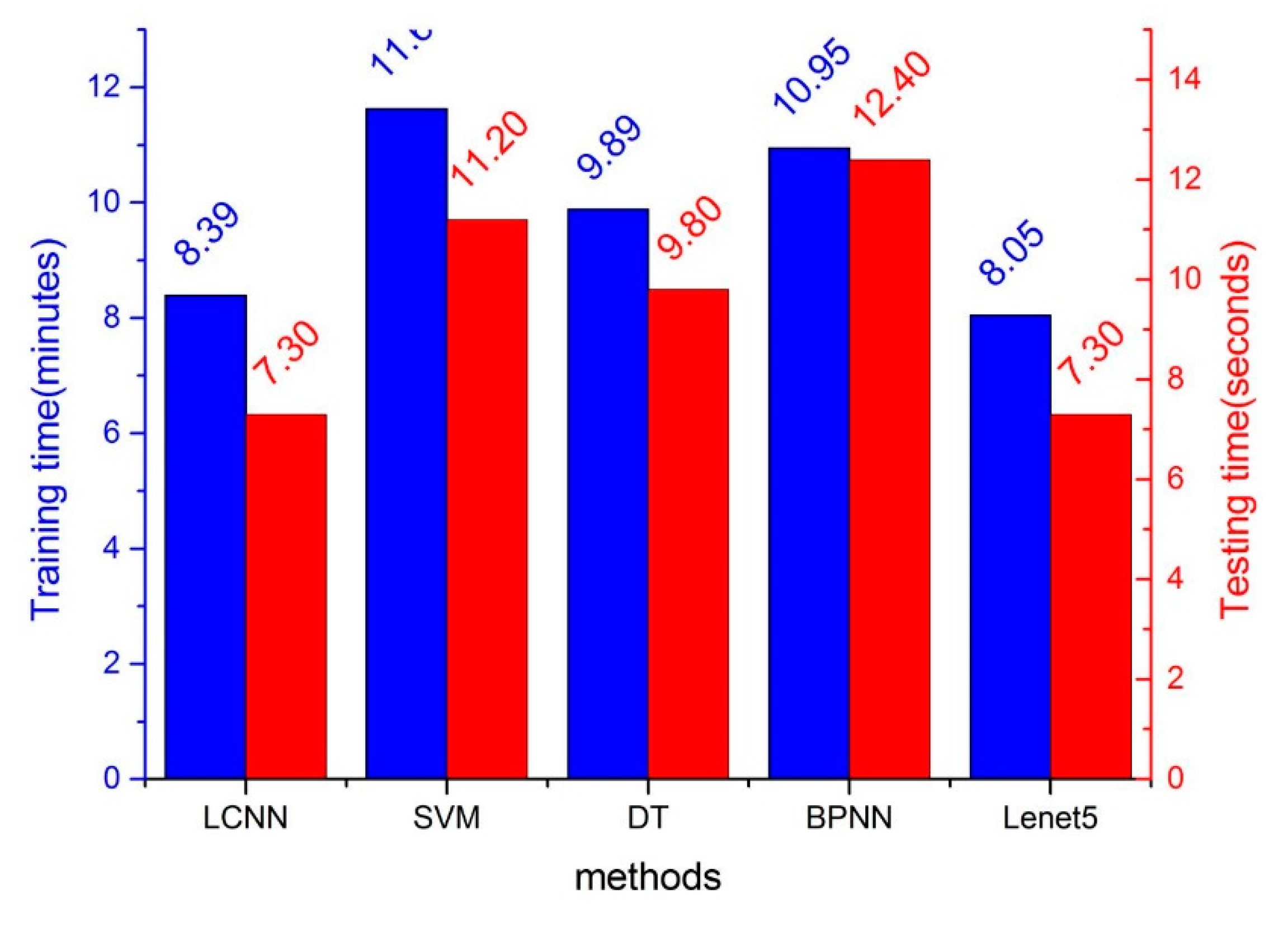
5.3. Model Time Analysis
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Khan, Q.; Refaat, S.S.; Abu-Rub, H.; Toliyat, H.A. Partial discharge detection and diagnosis in gas insulated switchgear: State of the art. IEEE Electr. Insul. Mag. 2019, 35, 16–33. [Google Scholar] [CrossRef]
- Gao, W.; Ding, D.; Liu, W. Research on the typical partial discharge using the UHF detection method for GIS. IEEE Trans. Power Deliv. 2011, 26, 2621–2629. [Google Scholar] [CrossRef]
- Stone, G.C. Partial discharge diagnostics and electrical equipment insulation condition assessment. IEEE Trans. Dielectr. Electr. Insul. 2005, 12, 891–904. [Google Scholar] [CrossRef]
- Niu, X.; Shao, S.; Xin, C.; Zhou, J.; Guo, S.; Chen, X.; Qi, F. Workload Allocation Mechanism for Minimum Service Delay in Edge Computing-Based Power Internet of Things. IEEE Access 2019, 7, 83771–83784. [Google Scholar] [CrossRef]
- Hu, W.; Yao, W.; Hu, Y.; Li, H. Selection of Cluster Heads for Wireless Sensor Network in Ubiquitous Power Internet of Things. Int. J. Comput. Commun. Control 2019, 14, 344–358. [Google Scholar] [CrossRef]
- Yao, R.; Hui, M.; Li, J.; Bai, L.; Wu, Q. A New Discharge Pattern for the Characterization and Identification of Insulation Defects in GIS. Energies 2018, 11, 971. [Google Scholar] [CrossRef] [Green Version]
- Han, X.; Li, J.; Zhang, L.; Pang, P.; Shen, S. A Novel PD Detection Technique for Use in GIS Based on a Combination of UHF and Optical Sensors. IEEE Trans. Instrum. Meas. 2019, 68, 2890–2897. [Google Scholar] [CrossRef]
- Okubo, H.; Hayakawa, N. A novel technique for partial discharge and breakdown investigation based on current pulse waveform analysis. IEEE Trans. Dielectr. Electr. Insul. 2005, 12, 736–744. [Google Scholar] [CrossRef]
- Li, T.; Rong, M.; Zheng, C.; Wang, X. Development simulation and experiment study on UHF partial discharge sensor in GIS. IEEE Trans. Dielectr. Electr. Insul. 2012, 19, 1421–1430. [Google Scholar] [CrossRef]
- Si, W.; Li, J.; Li, D.; Yang, J.; Li, Y. Investigation of a comprehensive identification method used in acoustic detection system for GIS. IEEE Trans. Dielectr. Electr. Insul. 2010, 17, 721–732. [Google Scholar] [CrossRef]
- Li, J.; Han, X.; Liu, Z.; Yao, X. A novel GIS partial discharge detection sensor with integrated optical and UHF methods. IEEE Trans. Power Deliv. 2016, 33, 2047–2049. [Google Scholar] [CrossRef]
- Tang, J.; Liu, F.; Zhang, X.; Meng, Q.; Zhou, J. Partial discharge recognition through an analysis of SF6 decomposition products part 1: Decomposition characteristics of SF 6 under four different partial discharges. IEEE Trans. Dielectr. Electr. Insul. 2012, 19, 29–36. [Google Scholar] [CrossRef]
- Gao, W.; Ding, D.; Liu, W.; Huang, X. Investigation of the Evaluation of the PD Severity and Verification of the Sensitivity of Partial-Discharge Detection Using the UHF Method in GIS. IEEE Trans. Power Deliv. 2013, 29, 38–47. [Google Scholar]
- Umamaheswari, R.; Sarathi, R. Identification of partial discharges in gas-insulated switchgear by ultra-high-frequency technique and classification by adopting multi-class support vector machines. Electr. Power Compon. Syst. 2011, 39, 1577–1595. [Google Scholar] [CrossRef]
- Hirose, H.; Hikita, M.; Ohtsuka, S.; Tsuru, S.-I.; Ichimaru, J. Diagnosis of electric power apparatus using the decision tree method. IEEE Trans. Dielectr. Electr. Insul. 2008, 15, 1252–1260. [Google Scholar] [CrossRef]
- Deng, R.; Zhu, Y.; Liu, X.; Zhai, Y. Multi-source Partial Discharge Identification of Power Equipment Based on Random Forest. In The IOP Conference Series: Earth and Environmental Science; IOP Publishing: Qingdao, China, 2019; Volume 17, p. 062039. [Google Scholar]
- Su, M.-S.; Chia, C.-C.; Chen, C.-Y.; Chen, J.-F. Classification of partial discharge events in GILBS using probabilistic neural networks and the fuzzy c-means clustering approach. Int. J. Electr. Power Energy Syst. 2014, 61, 173–179. [Google Scholar] [CrossRef]
- Tang, J.; Wang, D.; Fan, L.; Zhuo, R.; Zhang, X. Feature parameters extraction of GIS partial discharge signal with multifractal detrended fluctuation analysis. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 3037–3045. [Google Scholar] [CrossRef]
- Li, X.; Wang, X.; Xie, D.; Wang, X.; Yang, A.; Rong, M. Time–frequency analysis of PD-induced UHF signal in GIS and feature extraction using invariant moments. IET Sci. Meas. Technol. 2017, 12, 169–175. [Google Scholar] [CrossRef]
- Kawada, M.; Tungkanawanich, A.; Kawasaki, Z.-I.; Matsu-Ura, K. Detection of wide-band EM signals emitted from partial discharge occurring in GIS using wavelet transform. IEEE Trans. Power Deliv. 2000, 15, 467–471. [Google Scholar] [CrossRef] [Green Version]
- Gu, F.-C.; Chang, H.-C.; Kuo, C.-C. Gas-insulated switchgear PD signal analysis based on Hilbert-Huang transform with fractal parameters enhancement. IEEE Trans. Dielectr. Electr. Insul. 2013, 20, 1049–1055. [Google Scholar]
- Shang, H.; Lo, K.; Li, F. Partial discharge feature extraction based on ensemble empirical mode decomposition and sample entropy. Entropy 2017, 19, 439. [Google Scholar] [CrossRef] [Green Version]
- Dai, D.; Wang, X.; Long, J.; Tian, M.; Zhu, G.; Zhang, J. Feature extraction of GIS partial discharge signal based on S-transform and singular value decomposition. IET Sci. Meas. Technol. 2016, 11, 186–193. [Google Scholar] [CrossRef]
- Candela, R.; Mirelli, G.; Schifani, R. PD recognition by means of statistical and fractal parameters and a neural network. IEEE Trans. Dielectr. Electr. Insul. 2000, 7, 87–94. [Google Scholar] [CrossRef]
- Xue, J.; Zhang, X.-L.; Qi, W.-D.; Huang, G.-Q.; Niu, B.; Wang, J. Research on a method for GIS partial discharge pattern recognition based on polar coordinate map. In Proceedings of the 2016 IEEE International Conference on High Voltage Engineering and Application (ICHVE), Chengdu, China, 19–22 September 2016; pp. 1–4. [Google Scholar]
- Li, L.; Tang, J.; Liu, Y. Partial discharge recognition in gas insulated switchgear based on multi-information fusion. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 1080–1087. [Google Scholar] [CrossRef]
- Piccin, R.; Mor, A.R.; Morshuis, P.; Girodet, A.; Smit, J. Partial discharge analysis of gas-insulated systems at high voltage AC and DC. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 218–228. [Google Scholar] [CrossRef]
- Hao, L.; Lewin, P.L. Partial discharge source discrimination using a support vector machine. IEEE Trans. Dielectr. Electr. Insul. 2010, 17, 189–197. [Google Scholar] [CrossRef]
- Blufpand, S.; Mor, A.R.; Morshuis, P.; Montanari, G.C. Partial discharge recognition of insulation defects in HVDC GIS and a calibration approach. In Proceedings of the 2015 IEEE Electrical Insulation Conference (EIC), Seattle, WA, USA, 7–10 June 2015; pp. 564–567. [Google Scholar]
- Li, G.; Wang, X.; Li, X.; Yang, A.; Rong, M. Partial discharge recognition with a multi-resolution convolutional neural network. Sensors 2018, 18, 3512. [Google Scholar] [CrossRef] [Green Version]
- Song, H.; Dai, J.; Sheng, G.; Jiang, X. GIS partial discharge pattern recognition via deep convolutional neural network under complex data source. IEEE Trans. Dielectr. Electr. Insul. 2018, 25, 678–685. [Google Scholar] [CrossRef]
- Li, G.; Rong, M.; Wang, X.; Li, X.; Li, Y. Partial discharge patterns recognition with deep Convolutional Neural Network. In Proceedings of the Condition Monitoring and Diagnosis, Xi’an, China, 25–28 September 2016; pp. 324–327. [Google Scholar]
- Wan, X.; Song, H.; Luo, L.; Li, Z.; Sheng, G.; Jiang, X. Pattern Recognition of Partial Discharge Image Based on One-dimensional Convolutional Neural Network. In Proceedings of the 2018 Condition Monitoring and Diagnosis (CMD), Perth, WA, Australia, 23–26 September 2018; pp. 1–4. [Google Scholar]
- Nguyen, M.-T.; Nguyen, V.-H.; Yun, S.-J.; Kim, Y.-H. Recurrent neural network for partial discharge diagnosis in gas-insulated switchgear. Energies 2018, 11, 1202. [Google Scholar] [CrossRef] [Green Version]
- Fawzi, A.; Samulowitz, H.; Turaga, D.; Frossard, P. Adaptive data augmentation for image classification. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 3688–3692. [Google Scholar]
- Židek, K.; Hošovský, A. Image thresholding and contour detection with dynamic background selection for inspection tasks in machine vision. Int. J. Circ. 2014, 8, 545–554. [Google Scholar]
- Strub, F.; Gaudel, R.; Mary, J. Hybrid Recommender System based on Autoencoders. In Proceedings of the 1st Workshop on Deep Learning for Recommender Systems, Boston, MA, USA, 15 September 2016; pp. 11–16. [Google Scholar]
- Wang, H.; Wang, N.; Yeung, D.-Y. Collaborative deep learning for recommender systems. In Proceedings of the 21th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Sydney, Australia, 10–13 August 2015; pp. 1235–1244. [Google Scholar]
- Hershey, S.; Chaudhuri, S.; Ellis, D.P.W.; Gemmeke, J.F.; Jansen, A.; Moore, R.C.; Plakal, M.; Platt, D.; Saurous, R.A.; Seybold, B.; et al. CNN architectures for large-scale audio classification. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 131–135. [Google Scholar]
- Ruder, S. An Overview of Gradient Descent Optimization Algorithms. arXiv 2016, arXiv:1609.04747. [Google Scholar]
- Zeiler, M.D.; Fergus, R. Visualizing and understanding convolutional networks. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 818–833. [Google Scholar]
- Li, X.; Wang, X.; Yang, A.; Xie, D.; Ding, D.; Rong, M. Propogation characteristics of PD-induced UHF signal in 126 kV GIS with three-phase construction based on time–frequency analysis. IET Sci. Meas. Technol. 2016, 10, 805–812. [Google Scholar] [CrossRef]
- Hoshino, T.; Maruyama, S.; Sakakibara, T. Simulation of propagating electromagnetic wave due to partial discharge in GIS using FDTD. IEEE Trans. Power Deliv. 2008, 24, 153–159. [Google Scholar] [CrossRef]
- Nishigouchi, K.; Kozako, M.; Hikita, M.; Hoshino, T.; Maruyama, S.; Nakajima, T. Waveform estimation of particle discharge currents in straight 154 kV GIS using electromagnetic wave propagation simulation. IEEE Trans. Dielectr. Electr. Insul. 2013, 20, 2239–2245. [Google Scholar] [CrossRef]
- Yan, T.; Zhan, H.; Zheng, S.; Liu, B.; Wang, J.; Li, C.; Deng, L. Study on the propagation characteristics of partial discharge electromagnetic waves in 252 kV GIS. In Proceedings of the Condition Monitoring and Diagnosis, Bali, Indonesia, 23–27 September 2012; pp. 685–689. [Google Scholar]
- Hikita, M.; Ohtsuka, S.; Okabe, S.; Wada, J.; Hoshino, T.; Maruyama, S. Influence of disconnecting part on propagation properties of PD-induced electromagnetic wave in model GIS. IEEE Trans. Dielectr. Electr. Insul. 2010, 17, 1731–1737. [Google Scholar] [CrossRef]
- Taflove, A. Advances in Computational Electrodynamics: The Finite-Difference Time-Domain Method; Artech House: Norwood, MA, USA, 1998; pp. 11–17. [Google Scholar]
- Loubani, A.; Harid, N.; Griffiths, H.; Barkat, B. Simulation of Partial Discharge Induced EM Waves Using FDTD Method—A Parametric Study. Energies 2019, 12, 3364. [Google Scholar] [CrossRef] [Green Version]
- Zeng, F.; Dong, Y.; Ju, T. Feature extraction and severity assessment of partial discharge under protrusion defect based on fuzzy comprehensive evaluation. IET Gener. Transm. Dis. 2015, 9, 2493–2500. [Google Scholar] [CrossRef]
- Ueta, G.; Wada, J.; Okabe, S.; Miyashita, M.; Nishida, C.; Kamei, M. Insulation characteristics of epoxy insulator with internal void-shaped micro-defects. IEEE Trans. Dielectr. Electr. Insul. 2013, 20, 535–543. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Target Class | Output Class | Overall Accuracy (%) | |||
|---|---|---|---|---|---|---|
| M | N | O | P | |||
| LCNN | M | 159 | 1 | 0 | 0 | 98.13 |
| N | 0 | 159 | 0 | 1 | ||
| O | 0 | 0 | 157 | 3 | ||
| P | 1 | 2 | 4 | 153 | ||
| SVM | M | 152 | 6 | 0 | 2 | 93.76 |
| N | 1 | 153 | 2 | 4 | ||
| O | 3 | 1 | 150 | 6 | ||
| P | 6 | 2 | 7 | 145 | ||
| BPNN | M | 137 | 7 | 6 | 10 | 83.78 |
| N | 4 | 135 | 8 | 13 | ||
| O | 7 | 5 | 139 | 9 | ||
| P | 11 | 14 | 10 | 125 | ||
| DT | M | 150 | 2 | 0 | 8 | 93.44 |
| N | 3 | 151 | 0 | 6 | ||
| O | 2 | 1 | 154 | 3 | ||
| P | 7 | 6 | 4 | 143 | ||
| LeNet5 | M | 129 | 17 | 2 | 12 | 75.04 |
| N | 13 | 132 | 6 | 9 | ||
| O | 6 | 15 | 116 | 23 | ||
| P | 18 | 14 | 25 | 103 | ||
| AlexNet | M | 144 | 3 | 8 | 5 | 90.63 |
| N | 2 | 147 | 4 | 7 | ||
| O | 3 | 1 | 151 | 5 | ||
| P | 6 | 9 | 7 | 138 | ||
| VGG16 | M | 145 | 6 | 2 | 7 | 86.41 |
| N | 1 | 135 | 8 | 16 | ||
| O | 2 | 8 | 144 | 6 | ||
| P | 13 | 11 | 7 | 129 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Yan, J.; Yang, Z.; Liu, T.; Zhao, Y.; Li, J. Partial Discharge Pattern Recognition of Gas-Insulated Switchgear via a Light-Scale Convolutional Neural Network. Energies 2019, 12, 4674. https://doi.org/10.3390/en12244674
Wang Y, Yan J, Yang Z, Liu T, Zhao Y, Li J. Partial Discharge Pattern Recognition of Gas-Insulated Switchgear via a Light-Scale Convolutional Neural Network. Energies. 2019; 12(24):4674. https://doi.org/10.3390/en12244674
Chicago/Turabian StyleWang, Yanxin, Jing Yan, Zhou Yang, Tingliang Liu, Yiming Zhao, and Junyi Li. 2019. "Partial Discharge Pattern Recognition of Gas-Insulated Switchgear via a Light-Scale Convolutional Neural Network" Energies 12, no. 24: 4674. https://doi.org/10.3390/en12244674
APA StyleWang, Y., Yan, J., Yang, Z., Liu, T., Zhao, Y., & Li, J. (2019). Partial Discharge Pattern Recognition of Gas-Insulated Switchgear via a Light-Scale Convolutional Neural Network. Energies, 12(24), 4674. https://doi.org/10.3390/en12244674