1. Introduction
Distributed generations (DGs) are modular power generating systems that are placed in the distribution systems proximate to consumption centers in order to satisfy immediate power needs, defer investment on transmission and distribution upgrade and expansion, reduce production and welfare costs, reduce losses, diversify energy resources, improve system reliability, power quality, and network stabilities, and many other power system benefits accrue from it [
1,
2]. The technologies adopted in DG integrations may be renewable based (solar photovoltaic (PV), wind, biomass, fuel cells, etc.), or non-renewable based (internal combustion engines, etc.), or a hybrid of both. As renewable energy resources (RES) hybrid, DG provides a sustainable option due to its infinitude quantities, complementarity, environmental goodness, technological advancement, and economic profitability. However, inappropriate type, suboptimal sizing, and improper location of renewable energy hybrid distributed generations (REHDGs) such as PV and wind cause small-signal oscillations in the distribution systems (DSs). This is due to the variability of output power generated and injected from these REHDG, which totally depends on intermittent solar radiation, temperature, and wind speed. Several research works have agreed that the variability of power generated from intermittent renewable resources relative to load or vice versa results in power system oscillations [
3,
4,
5,
6,
7,
8]. That is, power imbalance between the total generations from the REHDGs, other plants and transmission feeder supply, and power demand aggregate at a time results in small-signal instabilities in the distribution system [
9,
10]. At large scale integration levels, the small-signal instabilities due to the variability of REHDGs power can have significant effects on the distribution networks (DNs) [
5,
7,
10]. All the aforementioned concerns make the formulation and optimization of REHDGs’ optimal allocation problems a task to solve with simple mathematical models. To obtain a realistic model, it is very important to represent the network as a dynamic model, use multiple periods for the planning horizon, and include all the pivotal constraints. Therefore, the planning and design of the optimal allocation of renewable energy hybrid DGs (REHDGs) requires a serious consideration of the type of network configurations, types of DG technologies, their intermittency modeling, and the number, capacities, and locations of the units. This is to achieve minimum total costs while the dynamic small-signal stability requirements of the network are simultaneously met and appropriately assessed.
There have been several diverse objectives continuously employed by many researchers on the optimal allocation of DGs in DSs. Some of these objectives are minimization of system losses and enhancement of voltage profile, minimization of line loss, minimization of investment and operation costs, minimization of total penalties for system loss compensations, minimization of renewable DG penetration, maximization of DG capacity, maximization of system reliability, and so on. Minimization of the NPV of the total cost as an objective function is very common in the planning of optimal allocation of REHDGs. Analytical based methods were proposed in [
11,
12,
13] for the planning and operation of the optimal locations and sizes of DGs in DSs. Numerical based methods whose algorithms find numerical solutions for different DG allocation problems were employed in [
14,
15,
16,
17,
18,
19,
20]. Linear programming (LP) [
14,
15], mixed integer non-linear programming (MINLP) [
16,
17], quadratic programming (QP) [
18,
19], and optimal power flow (OPF) [
20] are some of the common numerical methods applied in solving DGs’ allocation problem. Intelligent search (IS) based methods are differently employed to solve the optimal sizing and placement of DGs problems. IS methods utilize artificial intelligence (AI) algorithms like the genetic algorithm (GA) [
21,
22], particle swarm optimization (PSO) [
23,
24], simulated annealing (SA) [
25,
26,
27], harmony search (HS) [
28,
29], big bang crunch (BBC) [
30,
31], the fireworks algorithm (FA) [
32,
33], and the water drop algorithm (WDA) [
34,
35].
However, some current works use mixed integer linear programming (MILP) [
36,
37,
38,
39] for the mathematical formulation of the allocation model due to its ability to detail the physics and mechanics of the problems and find global optimal solutions with less computational requirement. In Munoz Delgado et al., MILP was used in the expansion planning of DS to minimize the NPV of total cost of investment, maintenance, production, power losses, and unserved power [
36]. A multi-stage and stochastic mathematical model, formulated as a mixed integer linear programming (MILP) problem, was employed in [
37] to find the optimal time, sizes, and placement of renewable DGs, compensators, and energy storage systems with a view toward minimizing the NPV of the total cost. In [
38], a chance constrained stochastic MILP model was formulated for determining optimal decisions in DGs’ investments with operational uncertainties modeling. The model was further optimized with a variant of the evolutionary method, the vertical sequencing protocol, to minimize the total cost of investment and operation. The authors in [
39] proposed MILP to optimize DG capacity hosting of a radial distribution network through the reconfiguration of existing tie and smart switches with the objective to maximize total DG capacity deployed into the network at a minimized cost. All the works discussed here evaluated static voltage stability, and few modeled the uncertainties of renewable resources, but were unable to assess the effects of the variability of renewable powers injected on the networks’ dynamic voltage and small-signal stabilities. Similarly, the global optimality of their solutions was not reported.
Despite several research studies in the areas of optimal sizing and placement of distributed generation problems, most of these works considered only the optimal location and sizing of a single DG unit, and those that were multiple DGs were mostly conventional sources. Most of the works did not evaluate the network stability, and those that did only evaluated static voltage stability, but not even a dynamic one. They did not evaluate long term dynamic small-signal stability, which is the prerequisite for a power system to be in operation in the first instance. Further improvements introduced in this study include the modeling of uncertainties in REHDGs’ allocation expansion planning model to account for the renewable resources’ intermittency, the usage of time varying load demands in a dynamic distribution network, and the use of dynamic model of the planning horizon to achieve optimal long term planning where capacity is added as and when needed. The planning of the optimal sizing, timing, and placement of renewable DG units to attain minimum cost and enhance the small-signal stability level during integration in the distribution network is the strength of this paper. Hence, its contributions are as follows:
To the authors’ knowledge, no literature has ever presented an assessment of long time dynamic small-signal stability in the planning optimization of REHDGs’ allocation in distribution networks.
Unlike previous studies, this work incorporates the variables necessary for the network stability and includes pivotal constraints that are necessary in REHDGs’ optimization for enhancing the long time dynamic small-signal stability of distribution networks.
In this study, dynamic planning is employed for the planning horizon, as opposed to the static model usually applied in most research works. The planning horizon is split into various time periods, which are comprised of a specific number of years and sub-years.
Unlike most existing research works, this work models the uncertainty of intermittent RES and implements time varying loads in a dynamic model of the distribution network.
In this paper, a mixed integer linear programming algorithm is proposed as done in [
37], to find the optimal time, sizes, and locations of multiple REHDGs in the distribution network systems (DNS). The typical syntax of a mixed integer linear programming formulation is presented as follows:
Subject to:
where
is the objective function, u and vare the vectors of continuous and discrete variables, respectively, and Expressions (
2) and (
3) are the inequality and equality constraints, respectively. Consequently, an allocation optimization model that determines the optimal sizes, time, and locations of renewable power units (solar PV, wind, and sugar-cane biomass) and capacitor banks (CB) and constrains variables that are responsible for network stability is developed. The optimal integration of these technologies is to essentially meet the objectives of maximizing the RES power generated and injected into the DNS and enhancing the small-signal stability (SSS) of the distribution systems. The resulting optimization model is formulated as a mixed integer linear mathematical program. In addition, the principle of fast decoupled power flow is applied in the linearization of traditional non-linear AC network model.
The remainder of the paper is arranged as follows: The mathematical modeling of renewable resources and load is presented in
Section 2. The output power of PV modules and wind turbines that can be harnessed during the planning time is calculated in
Section 3.
Section 4 formulates the optimization model for solving the RES allocation planning problem.
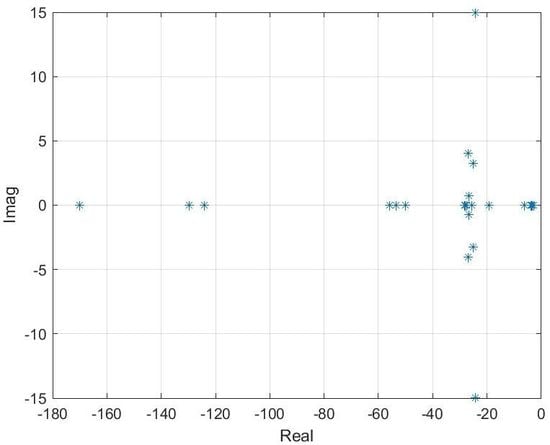
Section 5 theorizes about the power network model, renewable generators dynamic models, and the eigenvalue analysis approach necessary for evaluating the SSS of the proposed model. The discussion and analysis of the results from the case studies used for the validation of the proposed model are presented in
Section 6. Finally, the main conclusions of this paper are drawn in
Section 7.
7. Conclusions
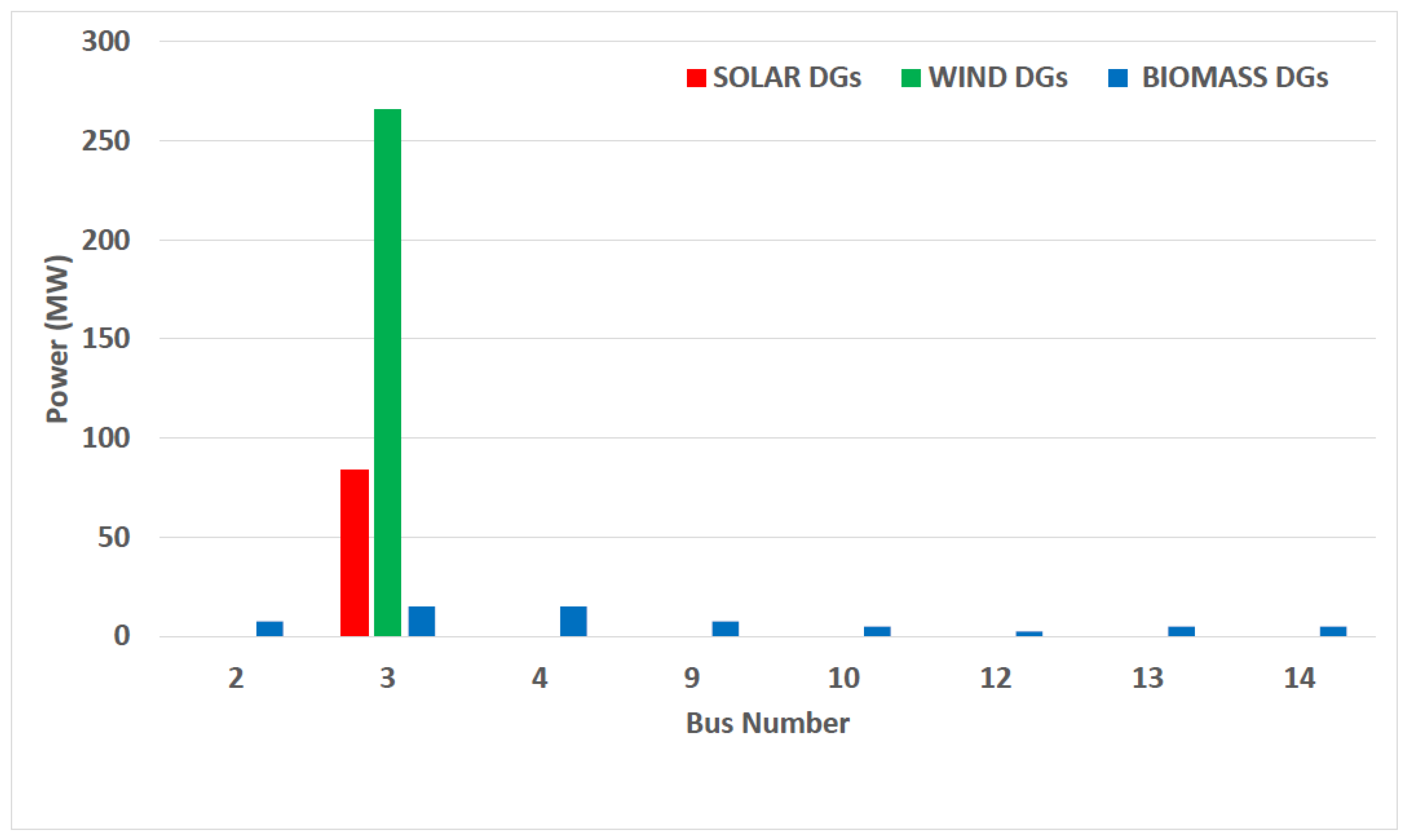
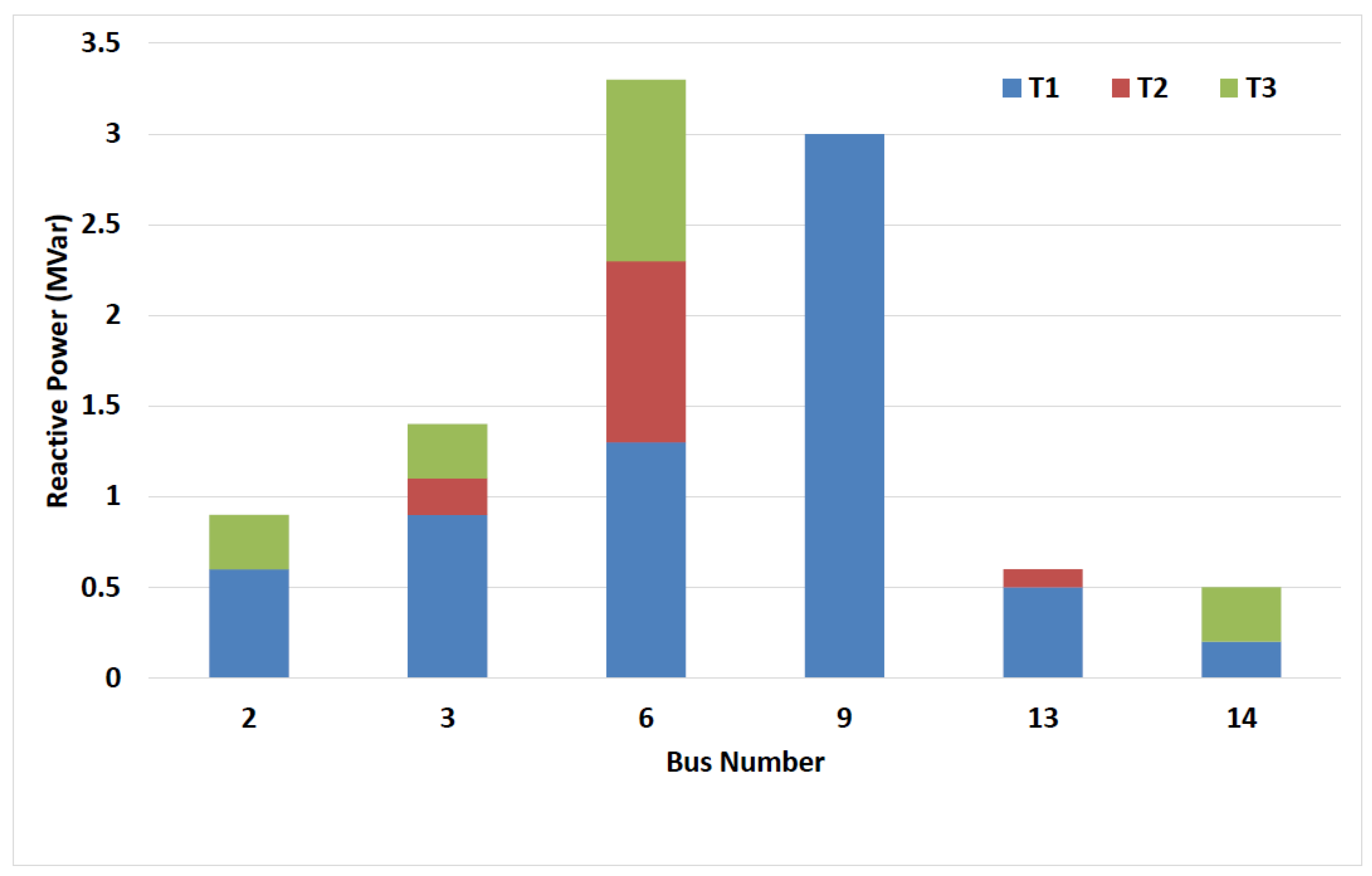
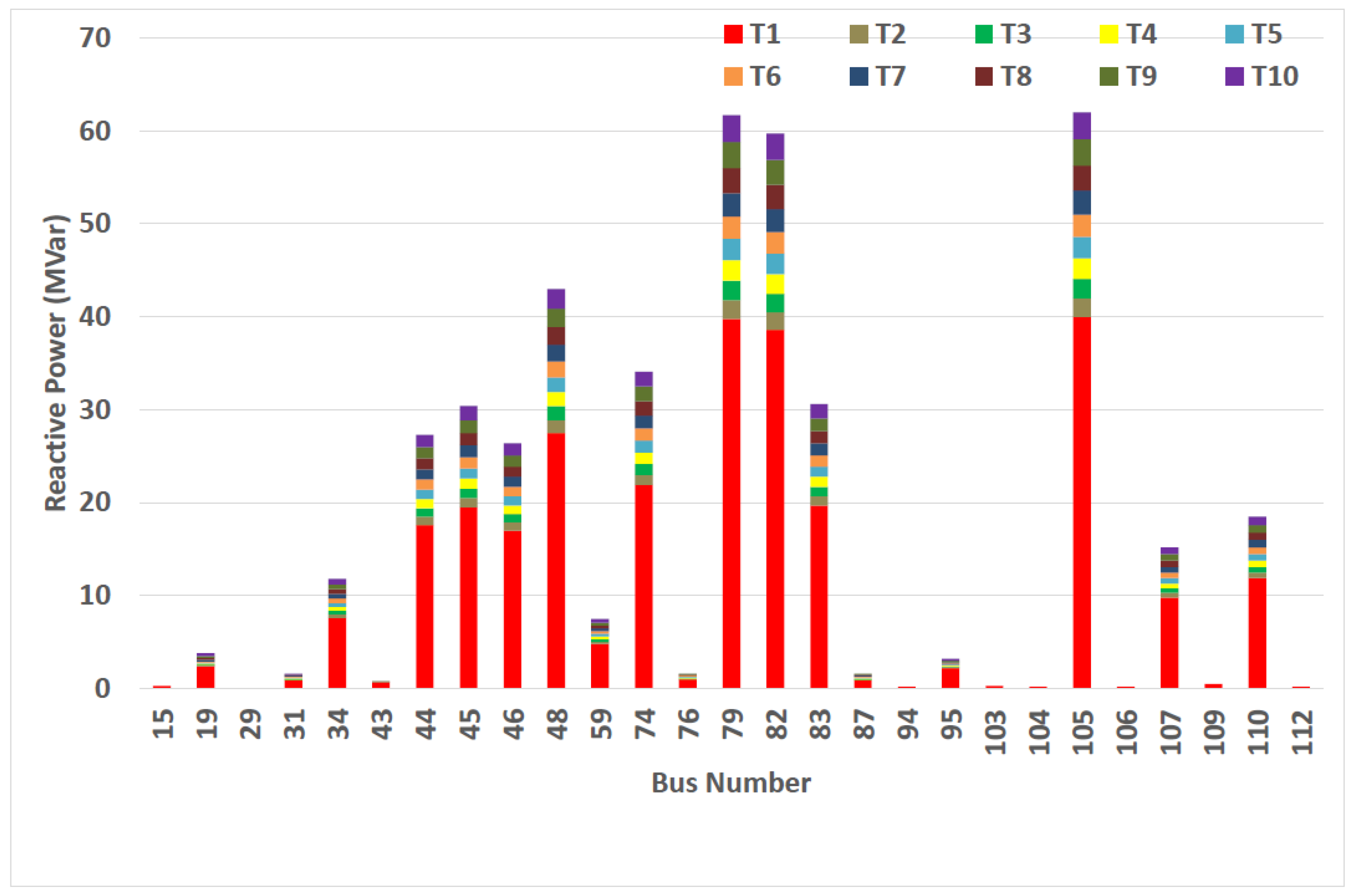
This study presented a new multi-stage distribution expansion planning mathematical model to integrate and allocate large scale hybrid renewable DGs such as solar PV, wind, and biomass (sugar cane) and capacitor banks into distribution systems optimally. The scenario based probabilistic modeling approaches, beta and Weibull distributions, were applied to model the random behavior of solar irradiance and wind speed, respectively. Biomass DG was taken as a firm generation whose capacity could be determined as and when needed. The proposed planning model decided the optimal time of integration and the numbers, sizes and location of REHDGS and reactive compensators in the distribution networks simultaneously. The main objective of this optimization work, to maximize the REHDG power generated and absorbed into the distribution networks while the long term dynamic voltage and small-signal stabilities are maintained at the required levels and a least possible NPV of the total cost, was achieved. The model was formulated as a stochastic mixed integer linear programming (MILP) problem, while the non-linear AC network was made linear with the principle of fast decoupled power flow in order to characterize the network without the loss of generality, maintain accuracy, and reduce the computational complexity. Two standard test distribution systems, the IEEE-14 bus and IEEE-118 bus, were used to validate the proposed model successfully and conduct the required assessment based on the objectives of this work. The results of both case studies indicated that integrating biomass DGs and reactive compensators with variable renewable generations (PV and wind DGs) significantly increased the amount of renewable power injected into the networks. This eventually brought about a monumental decrease in the total cost compared to meeting the load demands with the conventional generations. For the IEEE-14 bus system, 411 MW of renewable power and 9.7 MVAr of reactive power were added to the system, while the IEEE-118 bus added 1.7788 GW REHDG power and 442.7 MVAr compensators to the network. In both case studies, the dynamic voltage and small-signal stabilities were highly enhanced.
The planning model for REHDGs and capacitor banks’ integration proposed in this study demonstrated a significant improvement to the system in terms of dynamic stability enhancement, electricity and emission cost reductions, welfare, and environmental enhancement, and many other benefits accrued from it.
The formulation model proposed in this work was, therefore, a major step towards developing reliable and stable networks/grids that support the integration of large scale renewable generations.
Research in progress is focused on the application of intelligent search approaches for solving REHDGs’ allocation problem, enhancing long term dynamic stability, and estimating the economic “end effect” of the hybrid distributed generation components. Future work will be devoted to the combined investigation of harmonic losses together with the long term dynamic stability of the distribution network during the integration of large scale hybrid renewable DGs. Another future research interest is the investigation of other distributed generation technologies in relation to system power quality and dynamic stability.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}