Torque Ripple Optimization of a Novel Cylindrical Arc Permanent Magnet Synchronous Motor Used in a Large Telescope


Abstract
:1. Introduction
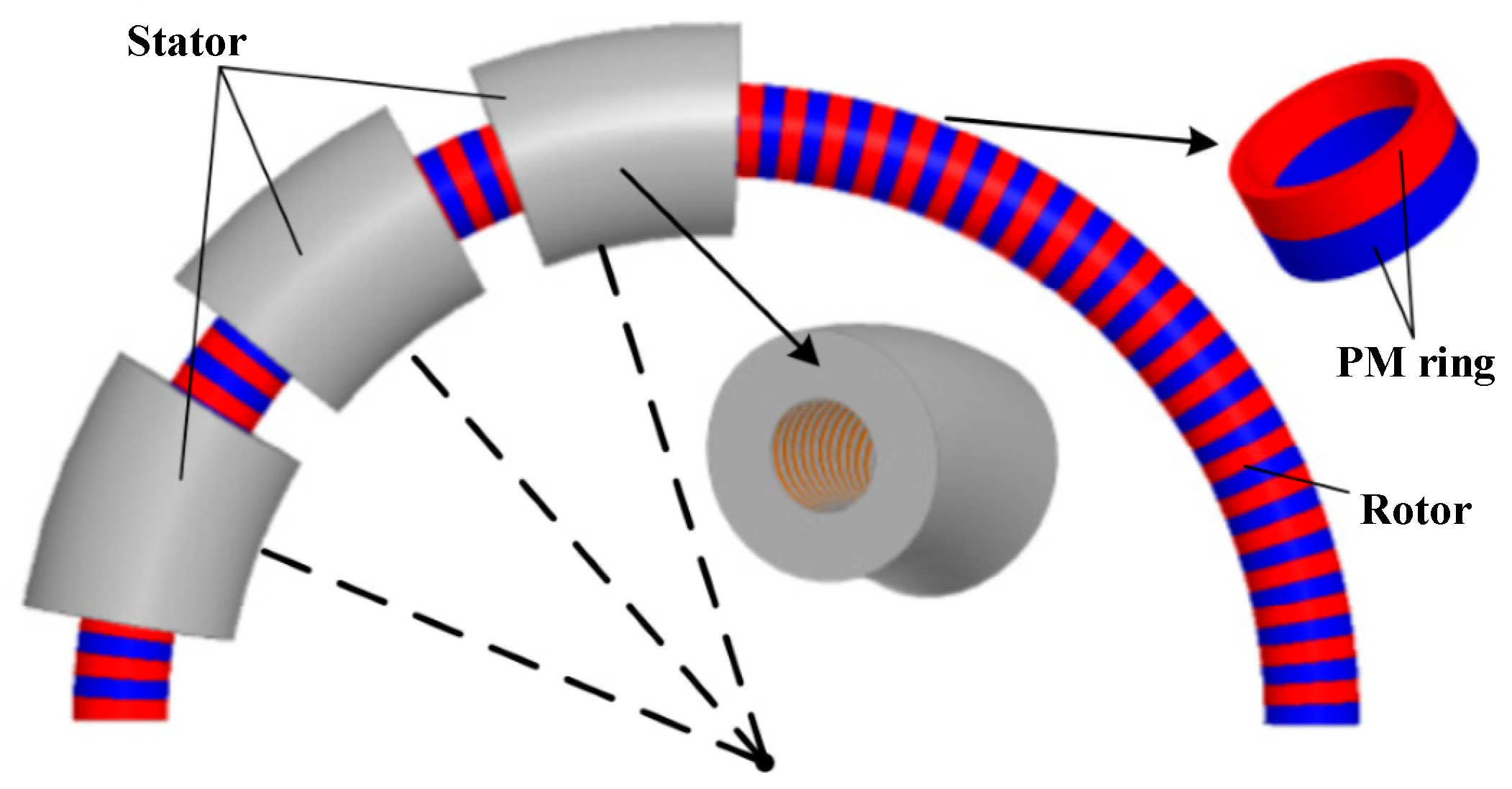
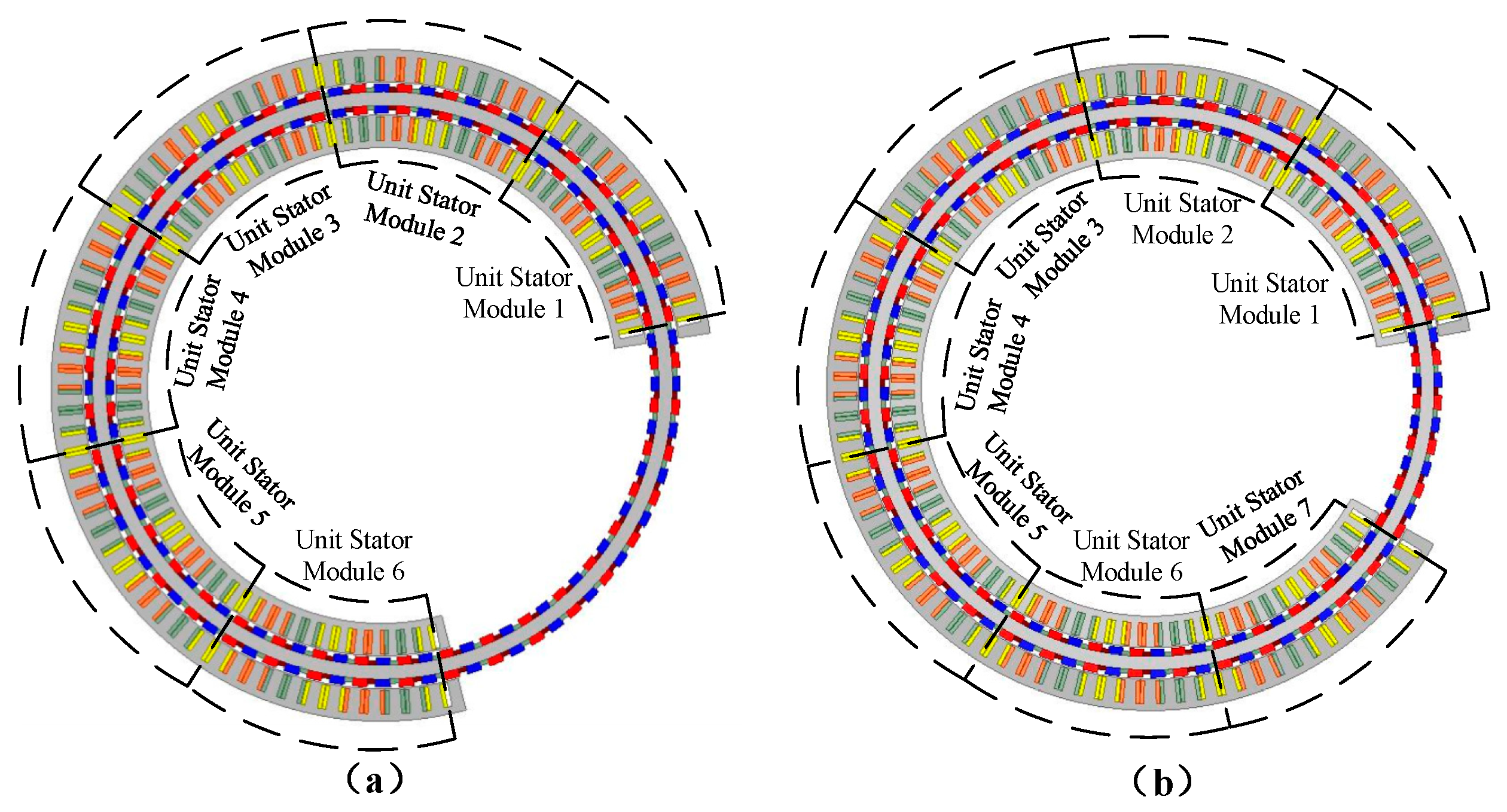
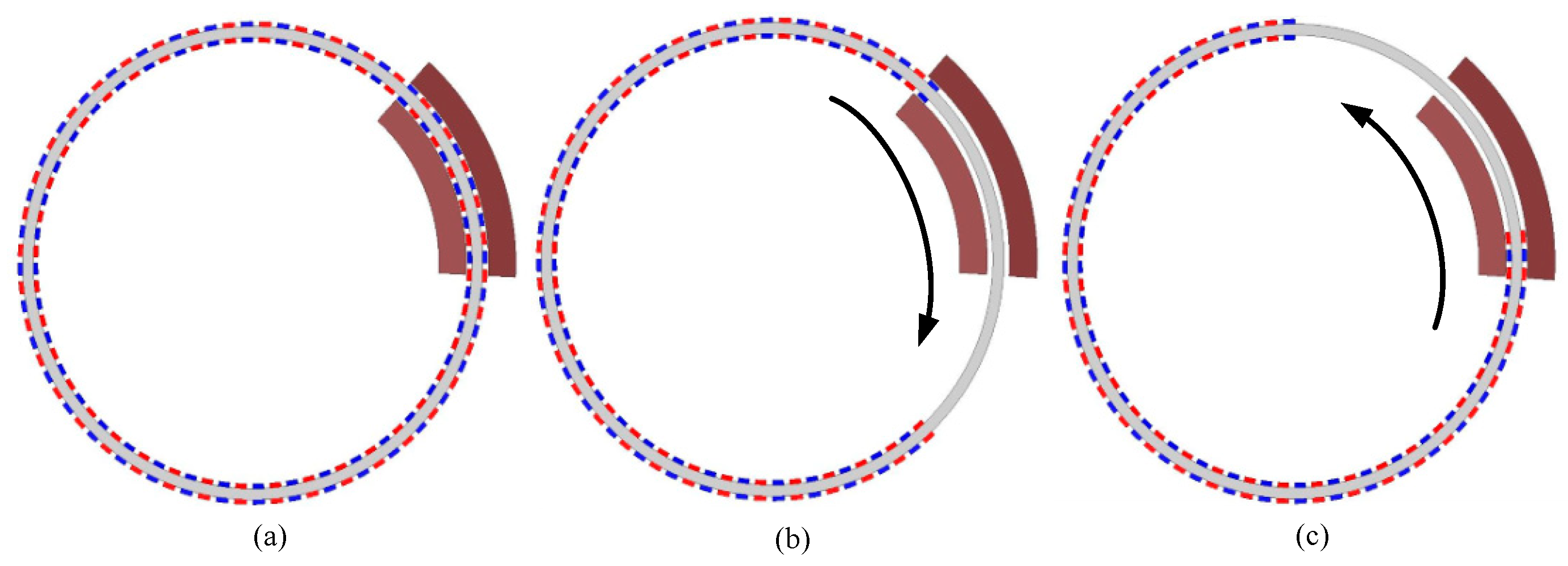
2. Configuration of Motor Model
3. Investigation into Separating Tslot and Tend
4. Optimization Method Analysis of Torque Characteristics
4.1. Optimization of End Torque
4.1.1. Optimization of the Stator Center Angle
4.1.2. Optimization of the Stator Adjacent Angle
4.2. Optimization of Slotted Torque
5. Optimization Result Analysis of Torque Characteristics
5.1. Optimization of Stator Central Angle
5.2. Optimization of the Adjacent Angle Between Two Stators
5.3. Unequal Thickness Halbach PM
5.4. Change the Central Angle of Slot Pitch
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Gilardi, G.; Szeto, K.; Huard, S.; Park, E.J. Finite element analysis of the cogging force in the linear synchronous motor array for the thirty meter telescope. Mechatronics 2011, 21, 116–124. [Google Scholar] [CrossRef]
- Chu, W.Q.; Zhu, Z.Q. Investigation of torque ripples in permanent magnet synchronous machines with skewing. IEEE Trans. Magn. 2013, 49, 1211–1220. [Google Scholar] [CrossRef]
- Hong, H.; Yoo, J. Shape design of the surface mounted permanent magnet in a synchronous machine. IEEE Trans. Magn. 2011, 47, 2109–2117. [Google Scholar] [CrossRef]
- Zheng, P.; Zhao, J.; Han, J.; Wang, J.; Yao, Z.; Liu, R. Optimization of the magnetic pole shape of a permanent-magnet synchronous motor. IEEE Trans. Magn. 2007, 43, 2531–2533. [Google Scholar] [CrossRef]
- Hwang, C.C.; Wu, M.H.; Cheng, S.P. Influence of pole and slot combinations on cogging torque in fractional slot PM motors. J. Magn. Magn. Mater. 2006, 304, e430–e432. [Google Scholar] [CrossRef]
- Lee, S.K.; Kang, G.H.; Hur, J.; Kim, B.W. Quasi-zero torque pulsation of surface permanent magnet synchronous motor for ship gyro stabilizer by pole/slot number and air-gap designs. IEEE Trans. Magn. 2014, 50, 7019704. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, H.S.; Meng, G.W.; Zhou, S.; Cao, Q. Analytical calculation of magnetic field and cogging torque in surface-mounted permanent magnet accounting for any eccentric rotor shape. IEEE Trans. Ind. Electron. 2015, 62, 3438–3447. [Google Scholar] [CrossRef]
- Wu, L.J.; Zhu, Z.Q.; Staton, D.A.; Popescu, M.; Hawkins, D. Comparison of analytical models of cogging torque in surface-mounted PM machines. IEEE Trans. Ind. Electron. 2012, 59, 2414–2425. [Google Scholar] [CrossRef]
- Dosiek, L.; Pillay, P. Cogging torque reduction in permanent magnet machines. IEEE Trans. Ind. Appl. 2007, 43, 1565–1570. [Google Scholar] [CrossRef]
- Zhang, H.; Kou, B.; Jin, Y.; Zhang, H. Investigation of auxiliary poles optimal design on reduction of end effect detent force for PMLSM with typical slot-pole combinations. IEEE Trans. Magn. 2015, 51, 8203904. [Google Scholar]
- Chang, J.J.; Ma, W.; Fan, Y.; Yang, H.; Huang, J. Design and optimization of arc permanent magnet synchronous motor used on large telescope. IEEE Trans. Magn. 2012, 48, 1943–1947. [Google Scholar]
- Li, B.; Zhao, J.; Liu, X.D.; Guo, Y.G.; Li, J. Detent force reduction of an arc-linear-permanent-magnet synchronous motor by using compensation windings. IEEE Trans. Magn. 2017, 64, 3001–3011. [Google Scholar] [CrossRef]
- Ho, S.L.; Wang, Q.; Niu, S.; Fu, W.N. A novel magnetic-geared tubular linear machine with Halbach permanent-magnet arrays for tidal energy conversion. IEEE Trans. Magn. 2015, 51, 811360. [Google Scholar] [CrossRef]
- Wang, H.; Fang, S.; Jahns, T.M.; Yang, H.; Lin, H. Various new magnet arrangements used in dual-stator permanent-magnet vernier machine for large telescope drive. In Proceedings of the 2018 IEEE International Magnetics Conference (INTERMAG), Singapore, 25 October 2018. [Google Scholar]
- Jin, P.; Fang, S.; Ho, S. Distribution characteristic and combined optimization of maximum cogging torque of surface-mounted permanent-magnet machines. IEEE Trans. Magn. 2018, 54, 8200505. [Google Scholar]
- Du, Z.; Lipo, T.A. Efficient utilization of rare earth permanent-magnet materials and torque ripple reduction in interior permanent-magnet machines. IEEE Trans. Ind. Appl. 2017, 53, 3485–3495. [Google Scholar] [CrossRef]
- Liu, G.; Du, X.; Zhao, W.; Chen, Q. Reduction of torque ripple in inset permanent magnet synchronous motor by magnets shifting. IEEE Trans. Magn. 2017, 53, 8100713. [Google Scholar] [CrossRef]
- Liu, C.; Yu, H.; Hu, M.; Liu, Q.; Zhou, S. Detent Force Reduction in Permanent Magnet Tubular Linear Generator for Direct-Driver Wave Energy Conversion. IEEE Trans. Magn. 2013, 49, 1913–1916. [Google Scholar] [CrossRef]
- Hu, Y.; Zhu, S.; Liu, C.; Wang, K. Electromagnetic Performance Analysis of Interior PM Machines for Electric Vehicle Applications. IEEE Trans. Energy Convers. 2018, 33, 199–208. [Google Scholar] [CrossRef]
- Zou, J.; Lan, H.; Xu, Y.; Zhao, B. Analysis of Global and Local Force Harmonics and Their Effects on Vibration in Permanent Magnet Synchronous Machines. IEEE Trans. Energy Convers. 2017, 32, 1523–1532. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Symbol | Value |
|---|---|---|
| Stator Outer diameter | Dout (mm) | 480 |
| Air gap | g (mm) | 1.2 |
| Stator central angle | θs (°) | 56.25 |
| Angle between two adjacent stators | θss (°) | 135 |
| Central angle of pole pitch | θp (°) | 4.5 |
| Central angle of slot pitch | θsp (°) | 3 |
| Stack length | h (mm) | 70 |
| Slot number | Snum | 40 |
| Rotor pole-pair number | Pnum | 64 |
| Current | I (A) | 15 |
| Voltage | U (V) | 15.82 |
| Turns per slot | N | 20 |
| Current density | J (A/mm2) | 7.5 |
| Efficiency | η (%) | 67.8% |
| Rated speed | nn (rpm) | 11.25 |
| PM grade | NdFeB40H | |
| Steel grade | DW310-35 | |
| Items | Symbol | Model I | Model II | Model III | Model IV |
|---|---|---|---|---|---|
| Stator Outer diameter | Dout (mm) | 480 | |||
| Air gap | g (mm) | 1.2 | |||
| Stator central angle | θs (°) | 56.25 | 52.075 | 49.915 | 49.915 |
| Angle between two adjacent stators | θss (°) | 90 | 135 | 120 | 120 |
| Stack length | h (mm) | 50 | 70 | 70 | 70 |
| Central angle of pole pitch | θp (°) | 5.625 | 4.5 | ||
| Central angle of slot pitch | θsp (°) | 5 | 3 | 3.75 | 3.75 |
| Rated output torque | Tm (Nm) | 120 | 126.65 | 126.56 | 126.04 |
| Torque ripple | κ | 4% | 31.73% | 3.13% | 1.17% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, S.; Xue, S.; Pan, Z.; Yang, H.; Lin, H. Torque Ripple Optimization of a Novel Cylindrical Arc Permanent Magnet Synchronous Motor Used in a Large Telescope. Energies 2019, 12, 362. https://doi.org/10.3390/en12030362
Fang S, Xue S, Pan Z, Yang H, Lin H. Torque Ripple Optimization of a Novel Cylindrical Arc Permanent Magnet Synchronous Motor Used in a Large Telescope. Energies. 2019; 12(3):362. https://doi.org/10.3390/en12030362
Chicago/Turabian StyleFang, Shuhua, Songhan Xue, Zhenbao Pan, Hui Yang, and Heyun Lin. 2019. "Torque Ripple Optimization of a Novel Cylindrical Arc Permanent Magnet Synchronous Motor Used in a Large Telescope" Energies 12, no. 3: 362. https://doi.org/10.3390/en12030362